


Оптосимисторы в схемах на микроконтроллере
Оптосимистор, как следует из названия, включается освещением полупроводникового слоя. По сути дела это комбинация оптоизлучателя и симистора, но в одном корпусе. Преимущество — простая схема управления и изоляция цепей.
Оптосимисторы могут коммутировать нагрузку сами (Рис. 2.108, а…в) или служить гальванической развязкой для MK (Рис. 2.109, а…ж).
а) прямое управление мощным оптосимистором VU1 (фирма Sharp) от MK;
б) оптосимистор VU1 (оптотриак фирмы Teledyne Technologies) управляет нагрузкой RH в сети переменного напряжения 220 В/16 А и имеет встроенный резистор Rx 440 Ом;
в) включение оптосимистора VU1 (замена S201S05V) через буферный транзистор VT1, который защищает порт MK при аварии. Мощность в нагрузке RH не более 100 Вт.
Рис. 2.109. Схемы гальванической изоляции симисторов при помощи оптосимисторов (начало):
а) трёхступенчатая схема управления на оптосимисторе VU1 и двух триаках KS7, VS2. Для сети 220 В триаки (они же симисторы) следует выбирать на напряжение не менее 600 В;
б) маломощный оптосимистор VU1 управляет мощным симистором VS1. Сопротивления резисторов R2, R3 варьируются в разных схемах. Встречающиеся варианты: VU1 — MOC3021, MOC3052; VS1 — ТС112…ТС142сдопустимым напряжением коммутации не менее 400 В;
в) аналогично Рис. 2.109, б, но с демпфирующей цепочкой R4, C1, а также с другим расположением нагрузки относительно симистора VS1 и другой полярностью сигнала с выхода MK. Возможные замены: VS1 – BT138-600, VU1 – MOC3062, MOC3063, MOC3051…MOC3053;
г) схема включения триака VS1, рассчитанного на напряжение 600 В и ток 8 А. Конденсаторы должны выдерживать переменное напряжение не менее 275 В. Для повышения устойчивости можно установить резистор 220…470 Ом между средним и нижним выводами триака;
д)аналогично Рис.2.109, г, но с активным ВЫСОКИМ уровнем на выходе MK, напряжением сети 120 В и с другими номиналами ЭРИ. Фильтр L1, C2 снижает коммутационные помехи;
Рис. 2.109. Схемы гальванической изоляции симисторов при помощи оптосимисторов
(окончание):
е) аналогично Рис. 2.109,6, но с дополнительной фильтрацией помех и снижением нарастания фронта управляющего сигнала при помощи конденсаторов С/, C2. Встречающиеся варианты замены элементов: VU1 — MOC3041, VS1 — BTA12-600, R2 = 470 Ом, R4 и C2 в некоторых схемах отсутствуют;
ж) оптосимистор VU1 управляет двумя относительно низковольтными симисторами VS1, VS2, включёнными последовательно (желательно подобрать пару с одинаковыми токами утечки). Резисторы RS, R6 распределяют примерно поровну сетевое напряжение в средней точке соединения VS1, VS2. Светодиоды HL1, HL2 индицируют аварийное состояние симисторов или же значительную ассиметрию их ВАХ. Вместо низковольтных симисторов КУ208Б можно поставить симисторы КУ208Г с вдвое большим допустимым напряжением. Как следствие, увеличится надёжность устройства и сохранится работоспособность при пробое одного из симисторов.
Источник: Рюмик, С. М., 1000 и одна микроконтроллерная схема. Вып. 2 / С. М. Рюмик. — М.:ЛР Додэка-ХХ1, 2011. — 400 с.: ил. + CD. — (Серия «Программируемые системы»).
Симисторный регулятор мощности с микроконтроллерным управлением / Habr
Однажды для одного небольшого домашнего проекта мне потребовался регулятор мощности, пригодный для регулировки скорости вращения электромотора переменного тока. В качестве основы использовалась вот такая плата на базе микроконтроллера STM32F103RBT6. Плата была выбрана как имеющая честный RS232 интерфейс и имеющая при этом минимум дополнительных компонентов. На плате отсутствует слот под литиевую батарейку для питания часов, но приживить его — дело пятнадцати минут.Итак, начнём с теории. Все знакомы с так называемой широтно-импульсной модуляцией, позволяющей управлять током в (или, что реже, напряжением на) нагрузке с максимальным КПД. Лишняя мощность в таком случае просто не будет потребляться, вместо того, чтобы рассеиваться в виде тепла, как при линейном регулировании, представляющем собой не более чем усложнённый вариант реостата. Однако, по ряду причин такое управление, будучи выполненным «в лоб», не всегда подходит для переменного тока. Одна из них — бо́льшая схемотехническая сложность, поскольку требуется диодный мост для питания силовой части на MOSFET или IGBT транзисторах. Этих недостатков лишено симисторное управление, представляющее собой модификацию ШИМ.
Симистор (TRIAC в англоязычной литературе) — это полупроводниковый прибор, модификация тиристора, предназначенный для работы в качестве ключа, то есть он может быть либо открыт, либо закрыт и не имеет линейного режима работы. Основное отличие от тиристора — двусторонняя проводимость в открытом состоянии и (с некоторыми оговорками) независимость от полярности тока (тиристоры и симисторы управляются током, как и биполярные транзисторы) через управляющий электрод. Это позволяет легко использовать симистор в цепях переменного тока. Вторая особенность, общая с тиристорами, — это свойство сохранять проводимость при исчезновении управляющего тока. Закрывается симистор при отключении тока между основными электродами, то есть, когда переменный ток переходит через ноль. Побочным эффектом этого является уменьшение помех при отключении. Таким образом, для открывания симистора нам достаточно подать на управляющий электрод открывающий импульс небольшой, порядка десятков микросекунд, длительности, а закроется он сам в конце полупериода переменного тока.
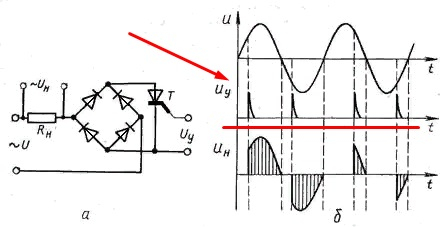
Симисторное управление учитывает вышеперечисленные свойства этого прибора и заключается в отпирании симистора на каждом полупериоде переменного тока с постоянной задержкой относительно точки перехода через ноль. Таким образом, от каждого полупериода отрезается «ломтик». Заштрихованная на рисунке часть — результат этой процедуры. Таким образом, на выходе вместо синусоиды мы будем иметь что-то, в известной степени напоминающее пилу:
Теперь наша задача — вовремя отпирать симистор. Эту задачу мы возложим на микроконтроллер. Приведённая ниже схема является результатом анализа имеющихся решений а также документации к оптронам. В частности, силовая часть взята из документации на симисторный оптрон производства Texas Instruments. Схема не лишена недостатков, один из которых — мощный проволочный резистор-печка, через который включён оптрон, детектирующий переход через ноль.
Как это работает? Рассмотрим рисунок.
На положительном полупериоде, когда ток через оптрон превышает некоторое пороговое значение, оптрон открывается и напряжение на входе микроконтроллера опускается практически до нуля (кривая «ZC» на рисунке). Когда же ток снова опускается ниже этого значения, на микроконтроллер снова поступает единица. Происходит это в моменты времени, отстоящие на dz от нуля тока. Это dz ощутимо, в моём случае составляет около 0.8 мс, и его необходимо учитывать. Это несложно: мы знаем период T и длительность импульса высокого уровня h, откуда dz = (h — T / 2) / 2. Таким образом, нам необходимо открывать симистор через dz + dP от переднего фронта сигнала с оптрона.
О фазовом сдвиге dP стоит поговорить отдельно. В случае c ШИМ постоянного тока среднее значение тока на выходе будет линейно зависеть от скважности управляющего сигнала. Но это лишь потому, что интеграл от константы даёт линейную зависимость. В нашем случае необходимо отталкиваться от значения интеграла синуса. Решение простого уравнения даёт нам искомую зависимость: для линейного изменения среднего значения тока необходимо менять фазовый сдвиг по закону арккосинуса, для чего достаточно ввести в управляющую программу LUT таблицу.
Всё, о чём я расскажу в дальнейшем, имеет прямое отношение к архитектуре микроконтроллеров серии STM32, в частности, к архитектуре их таймеров. Микроконтроллеры этой серии имеют разное число таймеров, в STM32F103RBT6 их семь, из которых четыре пригодны для захвата и генерации ШИМ. Таймеры можно каскадировать: для каждого таймера одно из внутренних событий (переполнение, сброс, изменение уровня на одном из входных или выходных каналов и т.д.; за подробностями отсылаю вас к документации) можно объявить выходным и направить его на другой таймер, назначив на него определённое действие: старт, стоп, сброс и т.д. Нам потребуются три таймера: один из них, работая в т.н. PWM input режиме, замеряет период входного сигнала и длительность импульса высокого уровня. По окончании измерения, после каждого периода генерируется прерывание. Одновременно с этим запускается связанный с этим событием таймер фазового сдвига, работающий в ждущем режиме. По событию переполнения этого таймера происходит принудительный сброс таймера, генерирующего выходной управляющий сигнал на симистор, таким образом, через каждый полный период переменного тока подстраивается фаза управляющего сигнала. Только первый таймер генерирует прерывание, и задача обработчика сводится к подстройке фазового сдвига (регистр ARR ждущего таймера) и периода ШИМ таймера (также регистр ARR) так, чтобы он всегда был равен половине периода переменного тока. Таким образом, всё управление происходит на аппаратном уровне и влияние программных задержек полностью исключается. Да, это можно было сделать и программно, но грех было не воспользоваться такой возможностью, как каскадируемые таймеры.
Выкладывать на обозрение код всего проекта я не вижу смысла, к тому же, он далёк от завершения. Приведу лишь фрагмент, содержащий описанный выше алгоритм. Он абсолютно независим от прочих частей и легко может быть портирован в другой проект на совместимом микроконтроллере.
И напоследок, видеоролик, показывающий устройство в действии:
Управление симисторами в схемах на микроконтроллере
Симистор («триак» по терминологии, принятой в США) — это двунаправленный симметричный тиристор. Симисторы очень удобны для систем ключевого регулирования в цепях переменного тока. Как следствие, они практически вытеснили тиристоры из бытовой техники (стиральные машины, пылесосы и т.д.).
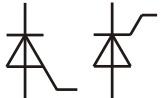
У симистора нет анода и катода. Его три вывода называются: УЭ (управляющий электрод), СЭУ (силовой электрод, расположенный ближе к УЭ), СЭ (силовой электрод у основания прибора) [2-197]. Существуют также аналогичные зарубежные названия, принятые в триаках, соответственно, «G» (Gate — затвор), «Т1» (Main Terminal 1) и «Т2» (Main Terminal 2).
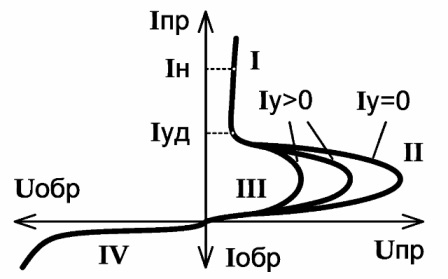
Симистор, в зависимости от конструкции, может открываться как положительными, так и отрицательными импульсами на выводе УЭ. Ветви ВАХ симметричные, поэтому ток через силовые электроды может быть и втекающим, и вытекающим. Итого, различают четыре режима работы в квадрантах 1…4 (Рис. 2.105).
Рис. 2.105. Режимы работы симисторов (триаков).
Первыми были разработаны четырёх квадрантные симисторы или, по-другому, 4Q-TpnaKM. Они требуют для нормальной работы введения в схему демпферных ЛС-цепочек (100 Ом, 0.1 МК Ф), которые устанавливаются параллельно силовым электродам СЭУ и СЭ. Таким нехитрым способом снижается скорость нарастания напряжения через симистор и устраняются ложные срабатывания при повышенной температуре и значительной индуктивной или ёмкостной нагрузке.
Технологические достижения последнего времени позволили создать трёхквадрантные симисторы или, по-другому, 3Q триаки. Они, в отличие от симисторов «4Q», работают в трёх из четырёх квадрантов и не требуют ЯС-цепочек. Типовые параметры 3Q-TpnaKOB Hi-Com BTA208…225 фирмы Philips: максимальное коммутируемое напряжение 600…800 В, ток силовой части 8…25 А, ток отпирания затвора (УЭ) 2…50 мА, малогабаритный SMD-корпус.
Схемы подключения симисторов к MK можно условно разделить на две группы: без развязки от сети 220 В (Рис. 2.106, a…r) и с гальванической изоляцией (Рис. 2.107, а…л).
Некоторые замечания. Типы указанных на схемах симисторов однообразны, в основном КУ208х, BTxxx, MACxxx. Это сделано специально, чтобы заострить внимание на схемотехнике низковольтной управляющей части, поскольку она ближе всего к MK. На практике можно использовать и другие типы симисторов, следя за их выходной мощностью и амплитудой управляющего тока.
Демпферные цепочки в силовой части на схемах, как правило, отсутствуют. Это упрощение, чтобы не загромождать рисунки, поскольку предполагается, что сопротивление нагрузки RH носит чисто активный характер. В реальной жизни демпфирование необходимо для 4Q-триаков, если нагрузка имеет значительную индуктивную или ёмкостную составляющую.
Рис. 2.106. Схемы подключения симисторов к MK без гальванической изоляции (начало):
а) ВЫСОКИЙ уровень на выходе МК открывает транзистор VT1, через который включается симистор VS1. Варистор RU1 защищает симистор от всплесков напряжения, начиная с порога 470 В (разброс 423…517 В). Это актуально при индуктивном характере нагрузки jRH;
б) аналогично Рис. 2.106, а, но с другой полярностью сигнала на выходе MK и с транзистором VT1 другой структуры, который выполняет функцию инвертора напряжения. Благодаря низкому сопротивлению резистора R2, повышается помехоусточивость. Сопротивление резистора R2 выбирается по тем же критериям, что и для схем на тиристорах;
Рис. 2.106. Схемы подключения симисторов к MK без гальванической изоляции (окончание):
в) высоковольтный транзистор ГУ2замыкаетдиагональдиодного моста VD1 при НИЗКОМ уровне на линии MK. Транзистор VT1 в момент рестарта MK находится в открытом состоянии из-за резистора R1, при этом симистор VS1 закрывается и ток через нагрузку RH не протекает;
г) прямое управление симистором VS1 с одного или нескольких выходов MK. Запараллеливание линий применяется при недостаточном токе управления (показано пунктиром). Ток через нагрузку RH не более 150 мА. Возможные замены: VS1 — MAC97A8, VD2— KC147A.
а) симистор VS1 включается/выключается при наличии/отсутствии импульсов 50…100 кГц, генерируемых с выхода MK. Изолирующий трансформатор T1 наматывается на кольце из феррита N30 и содержит в обмотке I — 15 витков, в обмотке II — 45 витков провода ПЭВ-0.2;
б) простая схема трансформаторной развязки. Симистор VS1 включается короткими импульсами с выхода MK. Ток управления зависит от коэффициента трансформации 77;
Рис. 2.107. Схемы гальванической изоляции МК от симисторов (продолжение):
в) разделительный трансформатор T1 наматывается на ферритовом кольце M1000HM размерами K20xl2x6 и содержит в обмотке I — 60 витков, в обмотке II — 120 витков провода ПЭВ-0.2. Цепочка R3, C1 накапливает энергию для импульсной коммутации транзистора K77;
г) если не требуется частое включение/выключение нагрузки, то для гальванической развязки можно использовать реле K1. Его контакты должны выдерживать без пробоя переменное напряжение 220 В. В некоторых схемах токоограничивающий резистор R3 закорачивают;
д) контакты геркона SF1 замыкаются при протекании тока через катушку индуктивности L1, которая намотана на его корпус. Достоинство — сверхбольшое сопротивление изоляции;
е) гальваническая развязка на транзисторной оптопаре VU1. Резистор R3 повышает помехоустойчивость, но может отсутствовать. Резистор Я2определяет порог открывания транзистора VT1. При использовании симисторов КУ208, TC106-10 сопротивление резистора Я2уменьшают до 30…75 кОм;
ж) симистором VS1 управляет драйвер DA1 (по-старому, КР1182ПМ1), который обеспечивает плавное изменение тока в нагрузке RH в зависимости от напряжения на конденсаторе C1. Если транзистор оптопары W/закрыт, то конденсатор С1 заряжается от внутреннего ИОН микросхемы DA1 и в нагрузке устанавливается максимальное напряжение. Резистор R4 может отсутствовать при наличии резистора R3. Резистор R3 можно закоротить при наличии резистора R4\
з) гальваническая развязка на опторезисторе VU1. Резистором R1 подбирается ток через своизлучатель VU1 и, соответственно, ток управления симистором VS1;
и) применение двух оптотиристоров VU1, УУ2щ\я коммутации симистора VS1 в любой пупериод сетевого напряжения. Резистор Л2ограничивает ток управления симистора;
к) питание входа УЭ симистора VS1 осуществляется от отдельной низковольтной обмотки промышленного трансформатора T1ТПП235-220/110-50;
л) применение оптотиристора VU1 для управления симистором VS1 (замена КУ208Д1). Из двух токоограничивающих резисторов R2, R3 обычно оставляют один, второй замыкают перемычкой. Замена VD1 — мост КЦ407А или четыре отдельных диода КД226.
Источник: Рюмик, С. М., 1000 и одна микроконтроллерная схема. Вып. 2 / С. М. Рюмик. — М.:ЛР Додэка-ХХ1, 2011. — 400 с.: ил. + CD. — (Серия «Программируемые системы»).
Тиристор и симистор.Способы и схемы управления
Тиристор и симистор.Способы и схемы управления
Тиристор — это переключающий полупроводниковый прибор, пропускающий ток в одном направлении. Симиcтop — полупроводниковый прибор, который широко используется в системах, питающихся переменным напряжением. Упрощенно он может рассматриваться как управляемый выключатель.
Тиристоры нашли широкое применение в полупроводниковых устройствах и преобразователях. Различные источники питания, частотные преобразователи, регуляторы, возбудительные устройства для синхронных двигателей и много других устройств строились на тиристорах, а в последнее время их вытесняют преобразователи на транзисторах. Основной задачей для тиристора является включение нагрузки в момент подачи управляющего сигнала. В этой статье мы рассмотрим, как управлять тиристорами и симисторами.

Определение
Тиристор (тринистор) — это полупроводниковый полууправляемый ключ. Полууправляемый — значит, что вы можете только включать тиристор, отключается он только при прерывании тока в цепи или если приложить к нему обратное напряжение.
Он, подобно диоду, проводит ток только в одном направлении. То есть для включения в цепь переменного тока для управления двумя полуволнами нужно два тиристора, для каждой по одному, хотя не всегда. Тиристор состоит из 4 областей полупроводника (p-n-p-n).
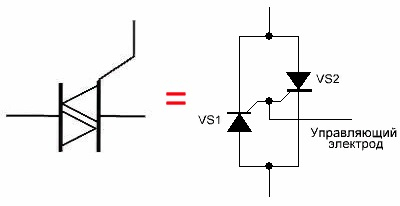
Другой подобный прибор называется симистор — двунаправленный тиристор. Его основным отличием является то, что ток он может проводить в обе стороны. Фактически он представляет собой два тиристора соединённых параллельно навстречу друг другу.
Основные характеристики
Как и любых других электронных компонентов у тиристоров есть ряд характеристик:
1. Падение напряжения при максимальном токе анода (VT или Uос).
2. Прямое напряжение в закрытом состоянии (VD(RM) или Uзс).
3. Обратное напряжение (VR(PM) или Uобр).
4. Прямой ток (IT или Iпр) – это максимальный ток в открытом состоянии.
5. Максимально допустимый прямой ток (ITSM) — это максимальный пиковый ток в открытом состоянии.
6. Обратный ток (IR) — ток при определенном обратном напряжении.
7. Постоянный ток в закрытом состоянии при определенном прямом напряжении (ID или Iзс).
8. Постоянное отпирающее напряжение управления (VGT или UУ).
9. Ток управления (IGT).
10. Максимальный ток управления электрода IGM.
11. Максимально допустимая рассеиваемая мощность на управляющем электроде (PG или Pу)
Принцип работы
Когда на тиристор подают напряжение он не проводит ток. Есть два способа включит его – подать напряжение между анодом и катодом достаточное для открытия, тогда его работа ничем не будет отличаться от динистора.
Другой способ – это подать кратковременный импульс на управляющий электрод. Ток открытия тиристора лежит в пределах 70-160 мА, хотя на практике эта величина, как и напряжение которое нужно приложить к тиристору зависит от конкретной модели и экземпляра полупроводникового прибора и даже от условий, в которых он работает, таких, например, как температура окружающей среды.
Кроме управляющего тока, есть такой параметр как ток удержания — это минимальный ток анода для удержания тиристора в открытом состоянии.
После открытия тиристора управляющий сигнал можно отключать, тиристор будет открыт до тех пор, пока через него протекает прямой ток и подано напряжение. То есть в цепи переменного тиристор будет открыт в течении той полуволны напряжение которой смещает тиристор в прямом направлении. Когда напряжение устремится к нулю, снизится и ток. Когда ток в цепи упадет ниже величины тока удержания тиристора — он закроется (выключится).
Полярность управляющего напряжения должна совпадать с полярностью напряжения между анодом и катодом, что вы наблюдаете на осциллограммах выше.
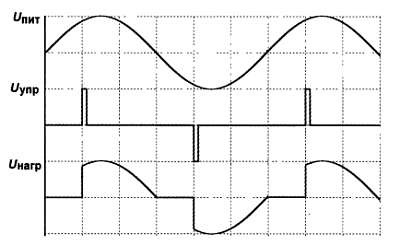
Управление симистором аналогично хоть и имеет некоторые особенности. Для управления симистором в цепи переменного тока нужно два импульса управляющего напряжения — на каждую полуволну синусоиды соответственно.
После подачи управляющего импульса в первой полуволне (условно положительной) синусоидального напряжения ток через симистор будет протекать до начала второй полуволны, после чего он закроется, как и обычный тиристор. После этого нужно подать еще один управляющий импульс для открытия симистора на отрицательной полуволне. Это наглядно проиллюстрировано на следующих осциллограммах.
Полярность управляющего напряжения должна соответствовать полярности приложенного напряжения между анодом и катодом. Из-за этого возникают проблемы при управлении симисторами с помощью цифровых логических схем или от выходов микроконтроллера. Но это легко решается путем установки симисторного драйвера, о чем мы поговорим позже.
Распространенные схемы управления тиристорами или симисторами
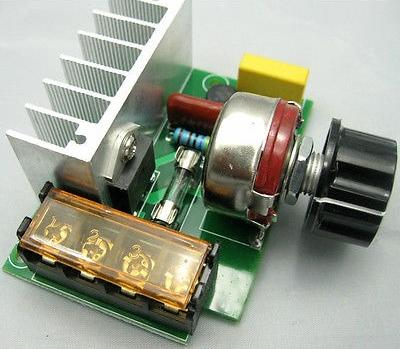
Самой распространенной схемой является симисторный или тиристорный регулятор.
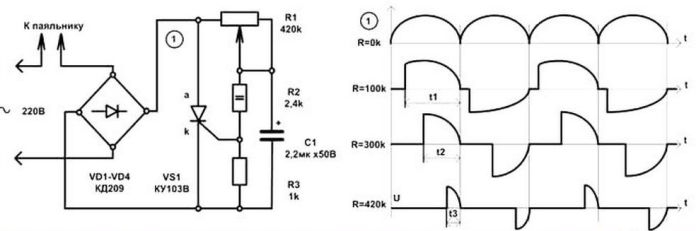
Здесь тиристор открывается после того как на конденсаторе будет достаточная величина для его открытия. Момент открытия регулируется с помощью потенциометра или переменного резистора. Чем больше его сопротивление — тем медленнее заряжается конденсатор. Резистор R2 ограничивает ток через управляющий электрод.
Эта схема регулирует оба полупериода, то есть вы получаете полную регулировку мощности почти от 0% и почти до 100%. Это удалось достичь, установив регулятор в диодном мосте, таким образом регулируется одна из полуволн.
Упрощенная схема изображена ниже, здесь регулируется лишь половина периода, вторая полуволна проходит без изменения через диод VD1. Принцип работы аналогичен.
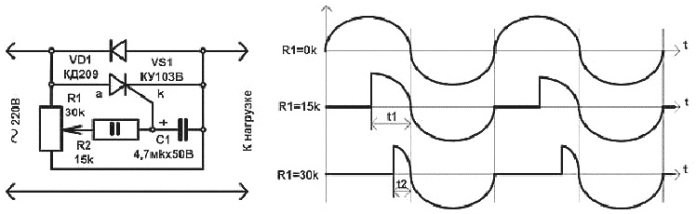
Симисторный регулятор без диодного моста позволяет управлять двумя полуволнами.
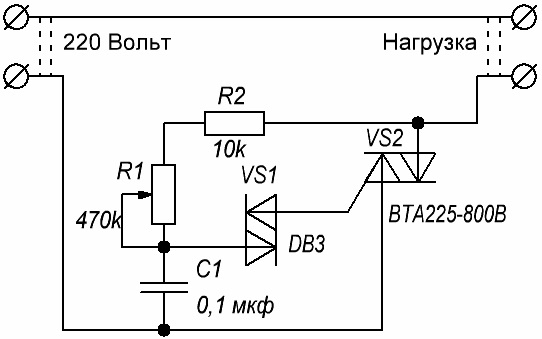
По принципу действия почти аналогична предыдущим, но построена на симисторе с её помощью регулируются уже обе полуволны. Отличия заключаются в том, что здесь импульс управления подаётся с помощью двунаправленного динистора DB3, после того как конденсатор зарядится до нужного напряжения, обычно это 28-36 Вольт. Скорость зарядки также регулируется переменным резистором или потенциометром. Такая схема реализована в большинстве бытовых диммеров.

Интересно:
Такие схемы регулировки напряжения называется СИФУ — система импульсного фазового управления.
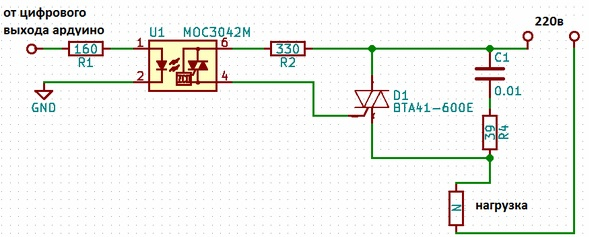
На рисунке выше изображен вариант управления симистором с помощью микроконтроллера, на примере популярной платформы Arduino. Симисторный драйвер состоит из оптосимистора и светодиода. Так как в выходной цепи драйвера установлен оптосимистор на управляющий электрод всегда подаётся напряжение нужной полярности, но здесь есть некоторые нюансы.
Дело в том, что для регулировки напряжения с помощью симистора или тиристора нужно подавать управляющий сигнал в определенный момент времени, так чтобы срез фазы происходил до нужной величины. Если наугад стрелять управляющими импульсами — схема работать конечно будет, но регулировок добиться не выйдет, поэтому нужно определять момент перехода полуволны через ноль.
Так как для нас не имеет значения полярность полуволны в настоящий момент времени — достаточно просто отслеживать момент перехода через ноль. Такой узел в схеме называют детектор нуля или нуль-детектор, а в англоязычных источниках «zero crossing detector circuit» или ZCD. Вариант такой схемы с детектором перехода через ноль на транзисторной оптопаре выглядит следующим образом:
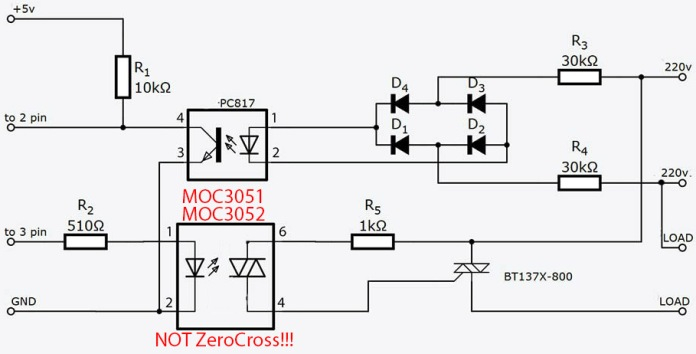
Оптодрайверов для управления симисторами есть множество, типовые – это линейка MOC304x, MOC305x, MOC306X, произведенные компанией Motorola и другими. Более того – эти драйверы обеспечивают гальваническую развязку, что убережет ваш микроконтроллер в случае пробоя полупроводникового ключа, что вполне возможно и вероятно. Также это повысит безопасность работы с цепями управления, полностью разделив цепь на «силовую» и «оперативную».
Заключение
Мы рассказали базовые сведения о тиристорах и симисторах, а также управлении ими в цепях с «переменкой». Стоит отметить, что мы не затрагивали тему запираемых тиристоров, если вас интересует этот вопрос – пишите комментарии и мы рассмотрим их подробнее. Также не были рассмотрены нюансы использования и управления тиристорами в силовых индуктивных цепях. Для управления «постоянкой» лучше использовать транзисторы, поскольку в этом случае вы решаете, когда ключ откроется, а когда он закроется, повинуясь управляющему сигналу…
Ранее ЭлектроВести писали, почему в современных инверторах используют транзисторы, а не тиристоры.
По материалам electrik.info