


Управление двигателем постоянного тока — схема и важные нюансы

Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление двигателем постоянного тока осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Схема управления двигателем постоянного тока
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.

Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя — один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк .
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.

Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.

Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
 Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику.

Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.

Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.

Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.

Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие переменное магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Типовые схемы управления электроприводами с двигателями постоянного и переменного токов
1. Типовые схемы управления электроприводами с двигателями постоянного тока
Схема пуска двигателя постоянного тока с независимым возбуждением по принципу времени
Эта схема представлена на рис. 1.1, а. Она содержит кнопки управления SB1 (пуск) и SB2 (останов) двигателя, линейный контактор КМ1, обеспечивающий подключение двигателя к сети, и контактор ускорения КМ2 для шунтирования пускового резистора Rд. В качестве датчика времени в схеме используется электромагнитное реле времени КТ. При подключении схемы к источнику напряжения U происходит возбуждение двигателя и срабатывает реле КТ, размыкая свой размыкающий контакт в цепи катушки контактора КМ2 и подготавливая двигатель к пуску.
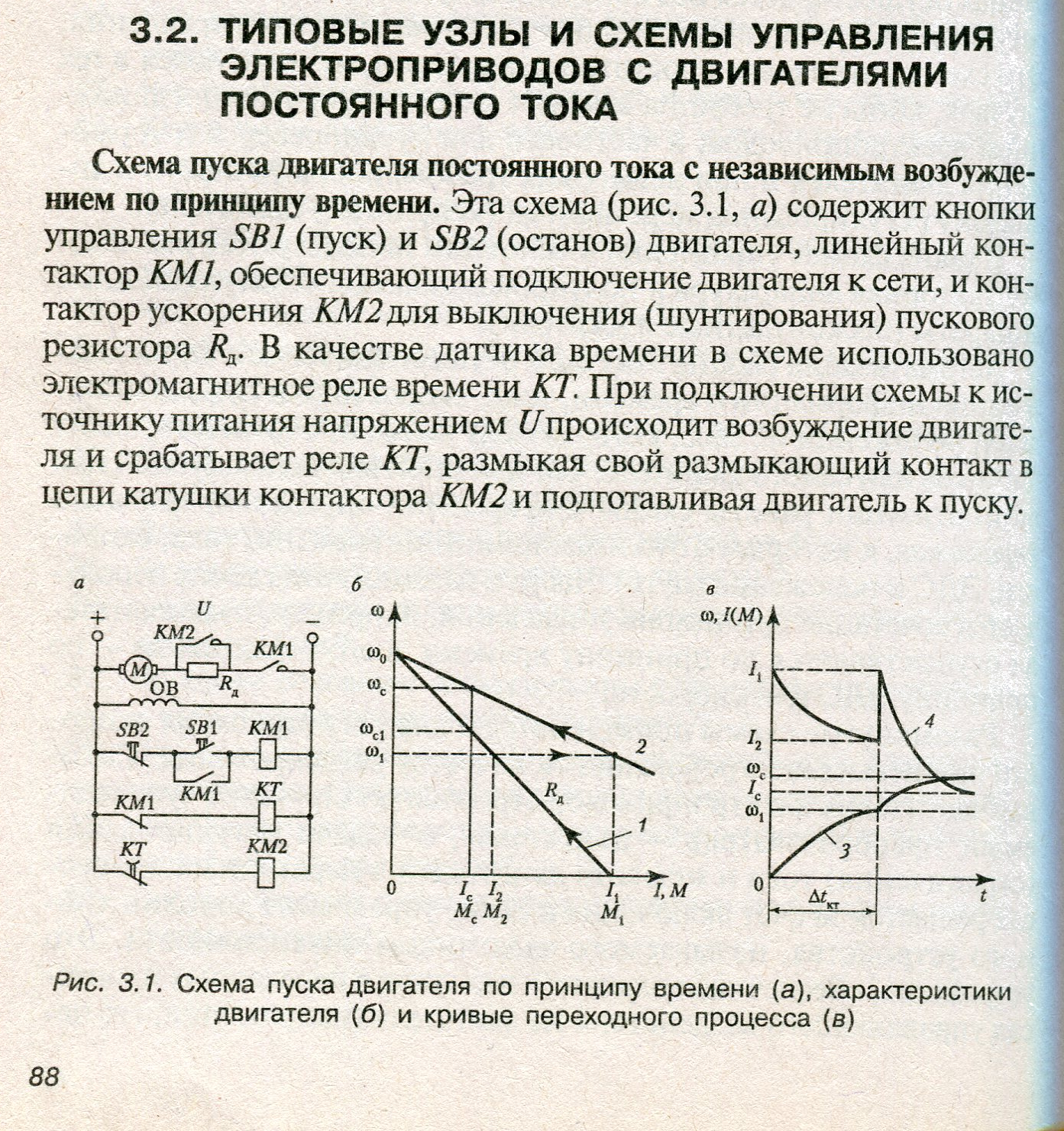
Рис. 1.1. Схема пуска двигателя по принципу времени (а), характеристики двигателя (б) и кривые переходного процесса (в)
Пуск двигателя начинается после нажатия кнопки SВ1, в результате чего получает питание контактор КМ1, который своим главным силовым контактом подключает двигатель к источнику питания. Двигатель начинает разбег с резистором Rд в цепи якоря, с помощью которого ограничивается пусковой ток двигателя. Одновременно замыкающий блок-контакт контактора КМ1 шунтирует кнопку SВ1, и она может быть отпущена, а размыкающий блок-контакт КМ1 разрывает цепь питания катушки реле времени КТ. Через интервал времени Δtк.т после прекращения питания катушки реле времени, называемый выдержкой времени, размыкающий контакт КТ замкнется в цепи катушки контактора КМ2, последний включится и главным контактом закоротит пусковой резистор Rд в цепи якоря. Таким образом, при пуске двигатель в течение времени Δtк.т разгоняется по искусственной характеристике 1 (рис. 1.1, б), а после шунтирования резистора Rд – по естественной 2. Значение сопротивления резистора Rд выбирается таким образом, чтобы в момент включения двигателя ток I1 в цепи и соответственно момент М1, не превосходили бы допустимого уровня.
За время Δtк.т после начала пуска частота вращения двигателя достигает значения ω1, а ток в цепи якоря снижается до уровня I2 (рис. 1, в). После шунтирования Rд, происходит бросок тока в цепи якоря от I2 до I1 который не превышает допустимого уровня. Изменение частоты вращения, тока и момента во времени происходит по экспоненте.
Останов двигателя осуществляется нажатием кнопки SВ2, что приведет к отключению якоря двигателя от источника питания и его торможению под действием момента сопротивления на валу. Такой способ останова двигателя получил название «торможение выбегом».
Схема пуска двигателя в две ступени по принципу ЭДС и динамического торможения по принципу времени.
В этой схеме (рис. 1.2, а) в качестве датчика ЭДС использован якорь двигателя, к которому подключены катушки контакторов ускорения КМ1 и КМ2, обеспечивающих шунтирование пусковых резисторов Rд1 и Rд2. С помощью регулировочных резисторов Rу1, и Rу2 , которые могут быть настроены на срабатывание при определенных частотах вращения двигателя.
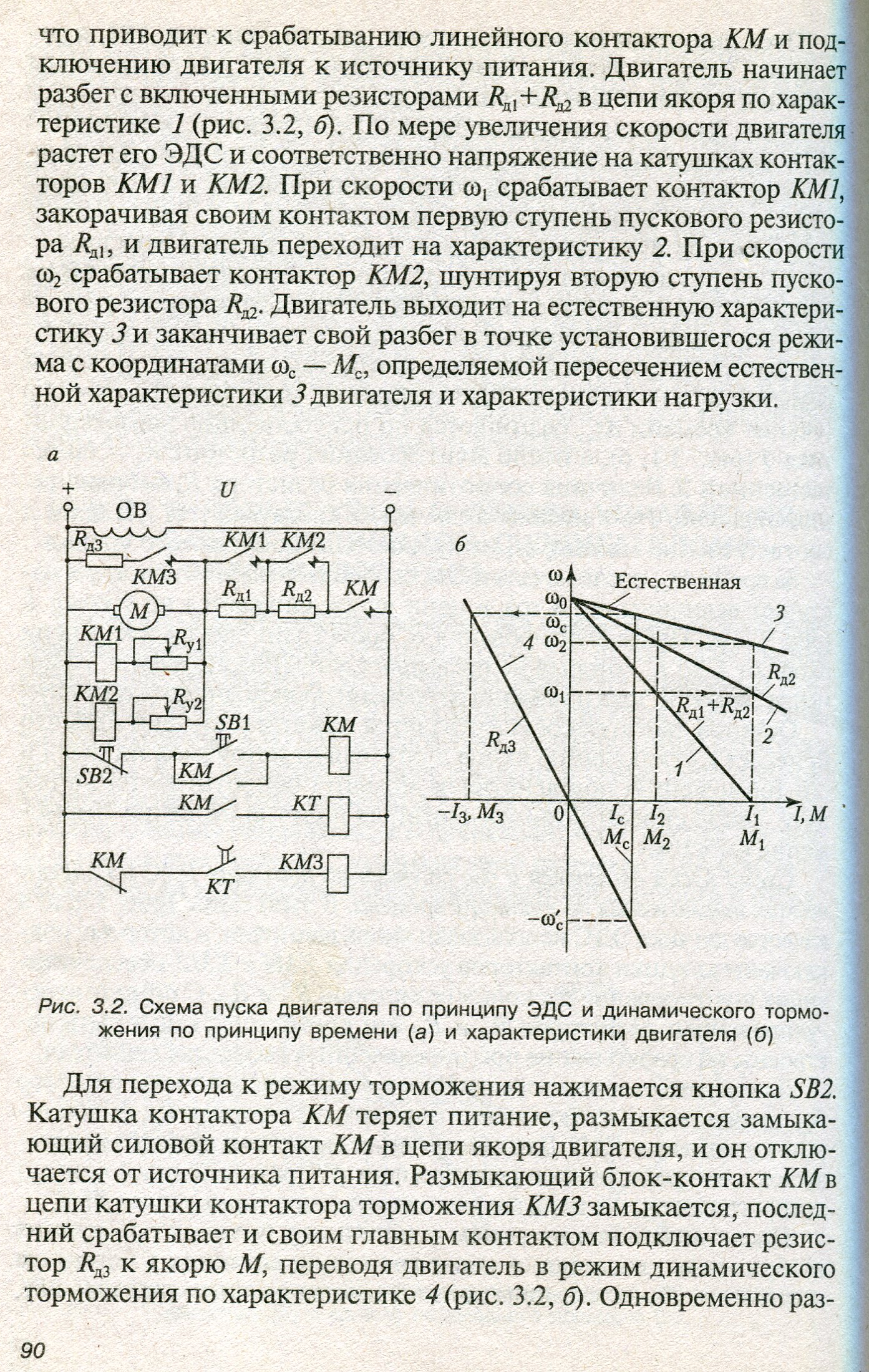
Рис. 1.2. Схема пуска двигателя по принципу ЭДС и динамического торможения по принципу времени (а) и характеристики двигателя (б)
Для осуществления торможения в схеме предусмотрен резистор R3, подключение и отключение которого осуществляется контактором торможения КМЗ. Для обеспечения выдержки времени используется электромагнитное реле времени КТ, размыкающий контакт которого включен в цепь катушки контактора торможения КМ2.
После подключения схемы к источнику питания происходит возбуждение двигателя, а аппараты схемы остаются в исходном положении. Пуск двигателя осуществляется нажатием кнопки SВ1, что приводит к срабатыванию линейного контактора КМ и подключению двигателя к источнику питания. Двигатель начинает разбег с включенными резисторами Rд1 + Rд2 в цепи якоря по характеристике 1 (рис. 1.2, б). По мере увеличения частоты вращения двигателя растет его ЭДС и соответственно напряжение на катушках контакторов КМ1 и КМ2. При частоте вращения ω1 срабатывает контактор КМ1, закорачивая своим контактом первую ступень пускового резистора Rд1, и двигатель переходит на характеристику 2. При частоте вращения ω2 срабатывает контактор КМ2,шунтируя своим контактом вторую ступень пускового резистора Rд2. Двигатель переходит на естественную характеристику 3 и заканчивает свой разбег в точке установившегося режима с координатами ωс – Мс, определяемой пересечением естественной характеристики 3 двигателя и характеристики нагрузки.
Для перехода к режиму торможения нажимается кнопка SB2. Катушка контактора КМ теряет питание, размыкается замыкающий силовой контакт КМ в цепи якоря двигателя, и он отключается от источника питания. Размыкающий блок-контакт КМ3 замыкается, последний срабатывает и своим главным контактом подключает резистор Rд3 к якорю М, переводя двигатель в режим динамического торможения по характеристике 4 (рис. 1.2, б). Одновременно размыкается замыкающий контакт контактора КМ в цепи реле времени КТ, оно теряет питание и начинает отсчет времени. Через интервал времени, который соответствует снижению частоты вращения двигателя до нуля, реле времени отключается и своим контактом разрывает цепь питания контактора КМЗ. Резистор Rд3 отключается от якоря М двигателя, торможение заканчивается, и схема возвращается в свое исходное положение.
Применение динамического торможения обеспечивает более быстрый останов двигателя и тем самым быстрое прекращение движения исполнительного органа рабочей машины.
Схема пуска двигателя в одну ступень по принципу времени и динамического торможения по принципу ЭДС.
Управление двигателем при пуске происходит по аналогии со схемой рис. 1.1. При включении двигателя в этой схеме (рис. 1.3) и работе от источника питания размыкающий контакт линейного контактора КМ в цепи контактора торможения КМ2 разомкнут, что предотвращает перевод двигателя в режим торможения.
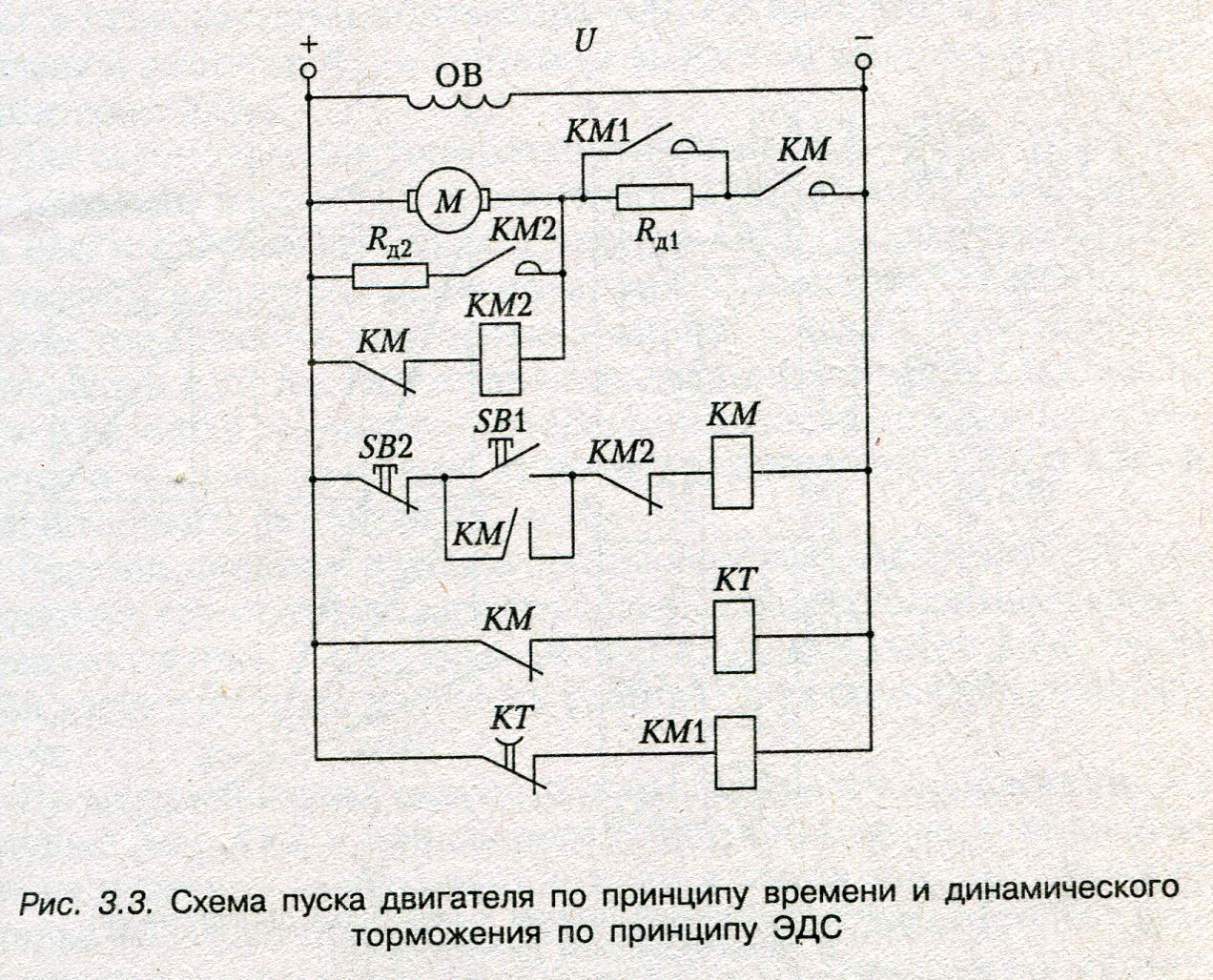
Рис. 1.3. Схема пуска двигателя по принципу времени и динамического торможения по принципу ЭДС
Торможение осуществляется нажатием кнопки SВ2. Контактор КМ, потеряв питание, отключает якорь двигателя от источника питания и замыкает своим контактом цепь питания катушки контактора КМ2. Последний от действия наведенной в якоре ЭДС срабатывает и замыкает якорь М на резистор торможения Rд1. Процесс динамического торможения происходит до тех пор, пока при небольшой частоте вращения двигателя его ЭДС не станет меньше напряжения отпускания контактора КМ2, который отключится, и схема вернется в исходное положение.
Схема управления пуском двигателя по принципу времени, реверсом и торможением противовключением по принципу ЭДС
В этой схеме (рис. 1.4, а) предусмотрено два линейных контактора КМ1 и КМ2, обеспечивающих его вращение соответственно в условных направлениях «Вперед» и «Назад». Главные контакты этих аппаратов образуют реверсивный контактный мостик, с помощью которого можно изменить полярность напряжения на якоре М и тем самым осуществлять торможение противовключением и реверс (изменение направления вращения) двигателя. В якорной цепи помимо пускового резистора Rд1 включен резистор противовключения Rд2, который управляется контактором противовключения КМЗ.
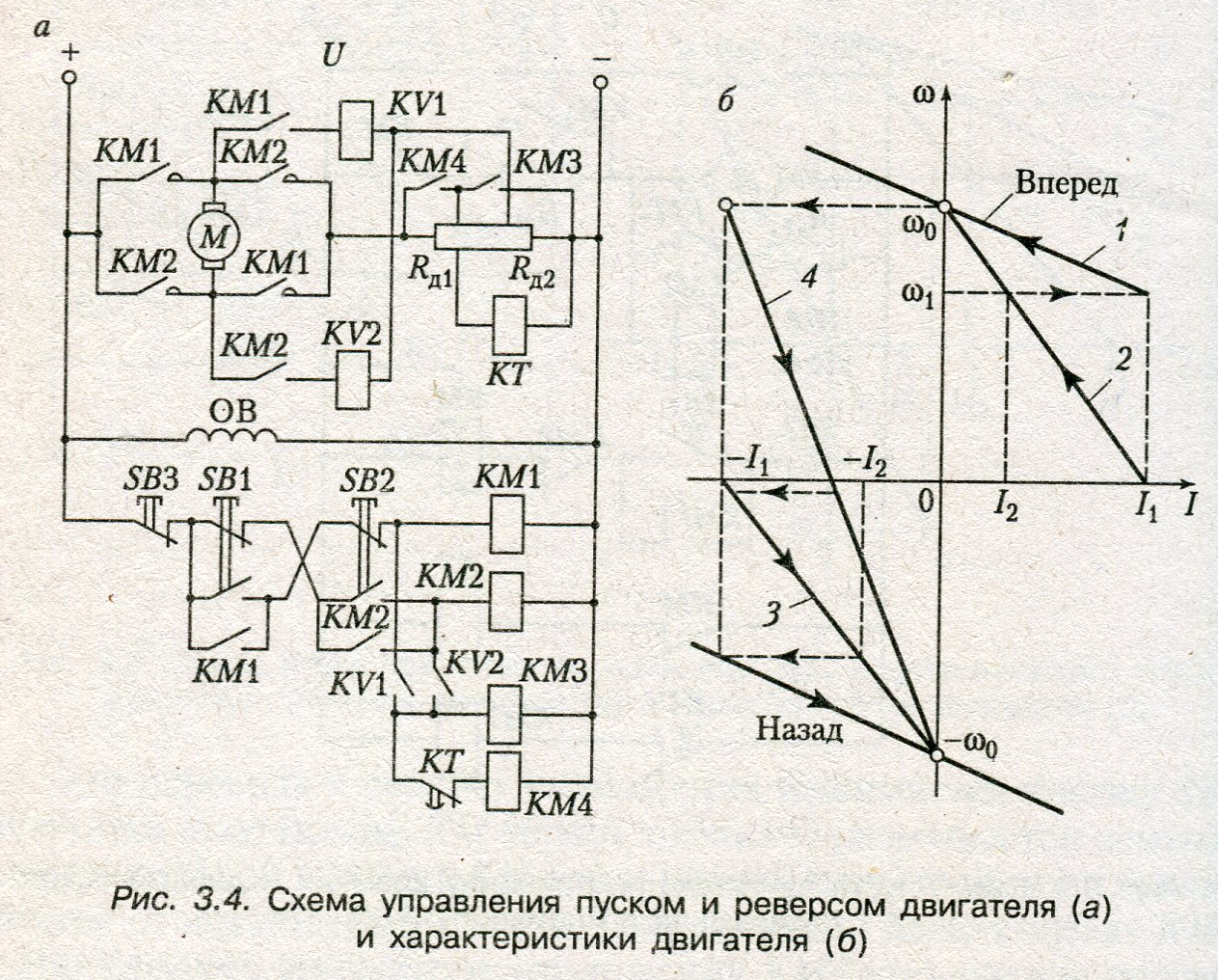
Рис. 1.4. Схема управления пуском и реверсом двигателя (а) и характеристики двигателя (б)
Управление двигателем при торможении противовключением и реверсе осуществляется с помощью двух реле противовключения КV1 и КV2. Их назначение в том, чтобы в режиме противовключения для ограничения тока в якоре до допустимого уровня обеспечить ввод в цепь якоря в дополнение к пусковому резистору Rд1, резистор противовключения Rд2, что достигается выбором точки присоединения катушек реле КV1 и КV2 к резистору (Rд1 + Rд2).
Пуск двигателя в любом направлении осуществляется в одну ступень в функции времени. При нажатии, например, кнопки SВ1 срабатывает контактор КМ1 и подключает якорь М к источнику питания. За счет падения напряжения на резисторе Rд1, от пускового тока срабатывает реле времени КТ, размыкающее свой контакт в цепи контактора КМ.
Включение КМ1 приведет также к срабатыванию реле КV1, которое замкнет свой замыкающий контакт в цепи контактора противовключения КМЗ. Это вызовет включение КМЗ, что приведет к закорачиванию ненужного при пуске резистора противовключения Rд2 и одновременно катушки реле времени КТ. Двигатель начнет разбег по характеристике 2 (рис. 1.4, б), а реле времени КТ – отсчет выдержки времени.
По истечении выдержки времени реле КТ замкнет свой контакт в цепи катушки контактора КМ, он включится, закоротит пусковой резистор Rд1 и двигатель выйдет на свою естественную характеристику 1.
Для осуществления торможения нажимается кнопка SВ2, в результате чего отключаются контактор КМ1, реле КV1, контакторы КМЗ и КМ4 и включается контактор КМ2. Напряжение на якоре двигателя изменяет свою полярность, и двигатель переходит в режим торможения противовключением с двумя резисторами в цепи якоря Rд1 и Rд2. Несмотря на замыкание контакта КМ2 в цепи реле КV2, оно в результате оговоренной выше настройки не включается и тем самым не дает включиться аппаратам КМЗ и КМ4 и зашунтировать резисторы Rд1 и Rд2.
Перевод двигателя в режим противовключения соответствует его переходу с естественной характеристики 1 на искусственную характеристику 4 (рис. 1.4, б). Во всем диапазоне частот вращения 0 < ω < ω0 на этой характеристике двигатель работает в режиме противовключения.
По мере снижения частоты вращения двигателя растет напряжение на катушке реле КV2, и при частоте вращения, близкой к нулю, оно достигнет напряжения срабатывания. Если к этому моменту времени кнопка SВ2 будет отпущена, то отключается контактор КМ2, схема возвращается в исходное положение и на этом процесс торможения заканчивается.
Если же при достижении малой частоты вращения кнопка SВ2 остается нажатой, то включается реле КV2 и процесс пуска двигателя повторяется, но уже в противоположную сторону. Таким образом, реверсирование двигателя включает в себя два этапа: торможение противовключением и пуск в противоположном направлении. Второй этап реверса изображен на рис. 1.4, б переходом двигателя с характеристики 4 на характеристику 3, соответствующую обратной полярности напряжения на якоре двигателя и наличию в якоре добавочного резистора Rд1.
Схема пуска двигателя постоянного тока с последовательным возбуждением по принципу тока
В этой схеме (рис. 1.5) используется реле тока КА, катушка которого включена в цепь якоря М, а размыкающий контакт – в цепь питания контактора ускорения КМ2. Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал току I2 (см. рис. 1.1, б). В схеме используется также дополнительное блокировочное реле КV с временем срабатывания большим, чем у реле КА.
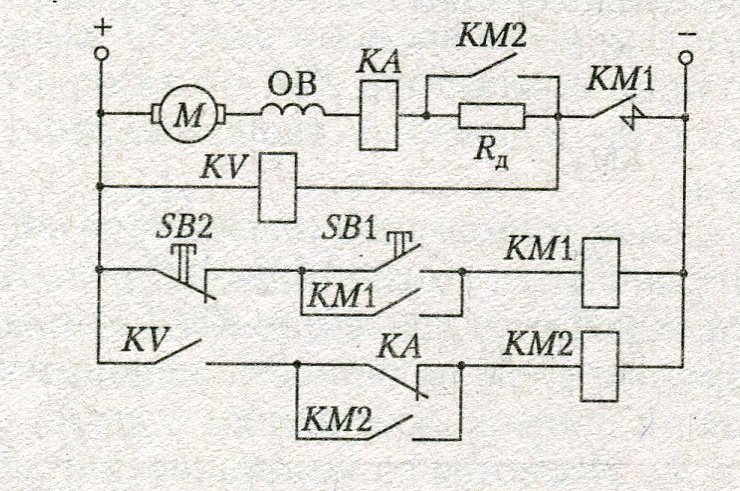
Рис. 1.5. Схема пуска двигателя по принципу тока
Работа схемы при пуске происходит следующим образом. После нажатия на кнопку SВ1 срабатывает контактор КМ1, двигатель подключается к источнику питания и начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактора КМ1 вызовет срабатывание реле тока КА, которое разомкнет свой размыкающий контакт в цепи контактора КМ2. Через некоторое время после этого срабатывает КV и замыкает свой замыкающий контакт в цепи контактора КМ2, подготавливая его к включению.
По мере разбега двигателя ток якоря снижается до значения тока переключения I2. При этом токе отключается реле тока и замыкает свой размыкающий контакт в цепи катушки контактора КМ2. Последний срабатывает, его главный контакт закорачивает пусковой резистор Rд, в цепи якоря, а вспомогательный контакт шунтирует контакт реле тока КА. Поэтому вторичное включение реле тока КА после закорачивания Rд и броска тока не вызовет отключения контактора КМ2 и двигатель продолжит разбег по своей естественной характеристике.
Схема типовой панели управления двигателем, обеспечивающая пуск, динамическое торможение и регулирование частоты вращения ослаблением магнитного потока
Типовые релейно-контакторные схемы управления ЭП содержат элементы блокировок, защит, сигнализации, а также связи с технологическим оборудованием. Для унификации схемных решений электротехническая промышленность выпускает стандартные станции, блоки и панели управления, специализированные по видам ЭП рабочих механизмов, функциональным возможностям, условиям эксплуатации, роду тока и т.д. Ниже в качестве примера рассмотрена схема одного из таких типовых устройств (рис. 1.6).
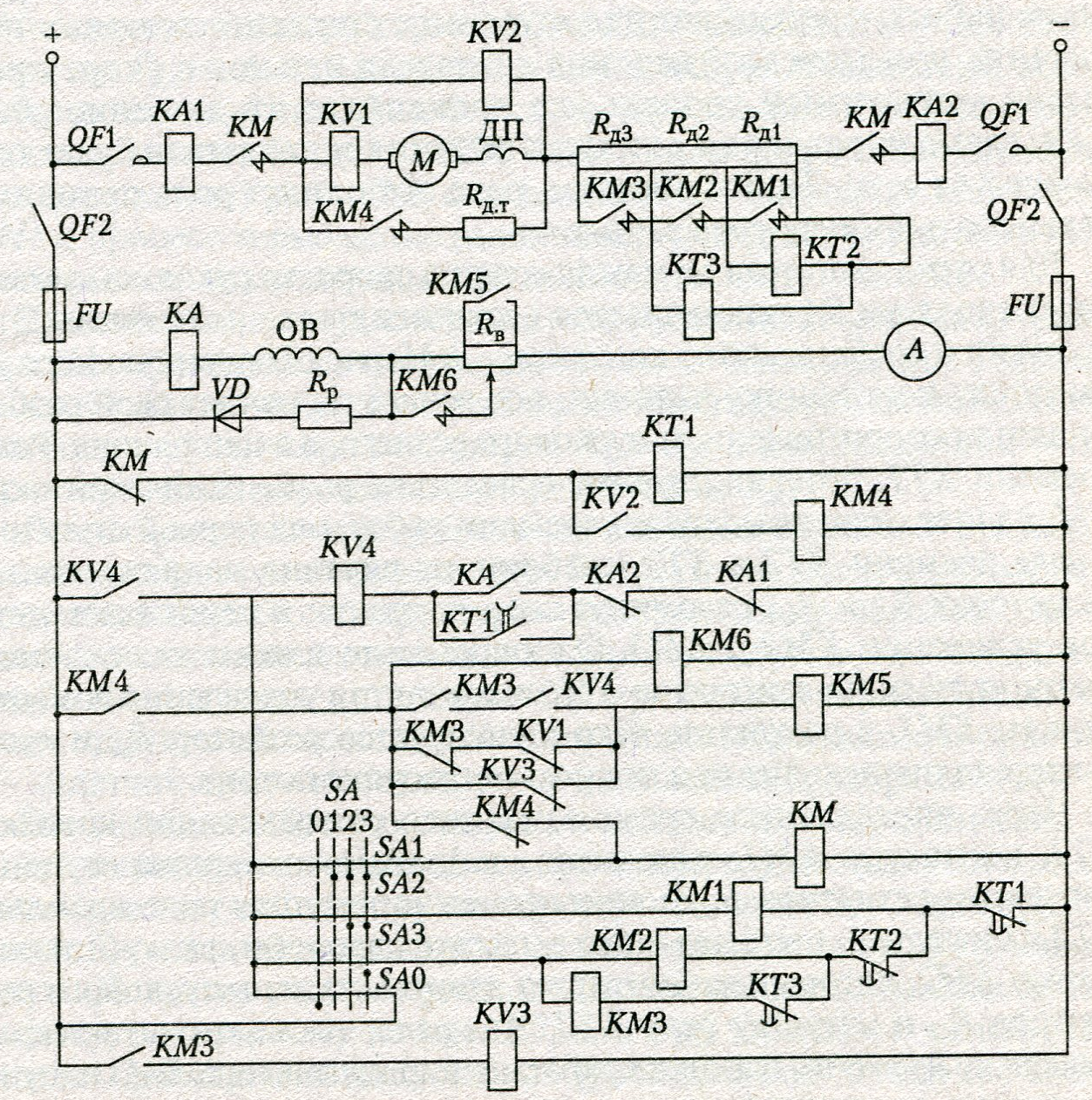
Рис. 1.6. Схема типовой панели управления двигателем
Органом управления в этой схеме является командоконтроллер SА, имеющий четыре положения рукоятки: одно нулевое (начальное) и три рабочих (см. рис. 1.6). Пуск двигателя осуществляется в три ступени по принципу времени, торможение – динамическое по принципу ЭДС.
Перед пуском командоконтроллер устанавливается в нулевое положение, затем включаются автоматические выключатели QF1 и QF2 и ЭП подключается к источнику питания. По обмотке ОВ возбуждения начинает протекать ток возбуждения, и, кроме того, срабатывает реле времени КТ1, шунтируя в цепи реле контроля напряжения своим контактом контакт реле КА обрыва цепи обмотки возбуждения. Если при этом реле максимального тока КА1 и КА2 находятся в нормальном (отключенном) положении, то срабатывает реле КV4, подготавливая питание схемы управления через свой замыкающий контакт. Если в процессе работы произойдет недопустимое снижение напряжения питания или тока возбуждения двигателя или ток в якоре превысит допустимый уровень, то произойдет отключение реле КV4, схема управления лишится питания и двигатель будет отключен от сети. Таким образом, реле выполняет роль исполнительного элемента трех защит.
Для пуска двигателя до максимальной частоты вращения рукоятка командоконтроллера SА перемещается в крайнее третье положение. Это приведет к срабатыванию контактора КМ и подключению якоря М двигателя к источнику питания, после чего он начнет свой разбег с полным сопротивлением пускового резистора в цепи якоря. Реле времени КТ1, потеряв питание вследствие размыкания контакта КМ, начнет отсчет выдержки времени работы на первой ступени, а реле времени КТ2 и КТЗ, сработав от падения напряжения на резисторах Rд1 и Rд2, разомкнут свои контакты в цепях контакторов ускорения КМ2 и КМ3. Одновременно с этим включаются «экономический» контактор КМ6 и контактор управления возбуждением КМЗ, в результате чего шунтируется резистор Rв и пуск двигателя происходит при полном магнитном потоке.
Через определенное время замкнется размыкающий контакт КТ1, контактор КМ1 включится, зашунтирует первую ступень пускового резистора Rд1 и одновременно катушку реле времени КТ2. Последнее, отсчитав свою выдержку времени, включит контактор КМ2, который зашунтирует вторую ступень пускового резистора Rд2 и катушку реле КТЗ. Это реле, также отсчитав свою выдержку времени, вызовет срабатывание контактора КМЗ и шунтирование последней ступени пускового резистора, после чего двигатель выходит на свою естественную характеристику.
После шунтирования третьей ступени пускового резистора начинается ослабление магнитного потока, которое подготавливается включением реле КVЗ срабатывания КМЗ. В процессе ослабления тока возбуждения с помощью реле управления КV1 обеспечивается контроль за током якоря. При бросках тока реле КV1 обеспечивает включение или отключение контактора КМЗ, усиливая или ослабляя ток возбуждения, в результате чего ток в якорной цепи не выходит за допустимые пределы. При размыкании контакта КМ5 часть тока возбуждения замыкается через диод VD и разрядный резистор Rр.
Торможение двигателя осуществляется перестановкой рукоятки командоконтроллера SА в нулевое положение. Это приводит к выключению контактора КМ и отключению якоря М от источника питания. Поскольку в процессе пуска двигателя реле динамического торможения КV2 включилось, замыкание размыкающего контакта КМ в цепи контактора торможения КМ4 вызовет его включение. Резистор Rдт окажется подключенным к якорю М двигателя, который перейдет в режим динамического торможения. При малых частотах вращения двигателя, когда его ЭДС станет ниже напряжения отпускания (удержания) реле КV2, оно отключится, выключит контактор КМ4 и процесс торможения закончится. Отметим, что динамическое торможение происходит при полном магнитном потоке.
Для снижения частоты вращения двигателя рукоятка командоконтроллера SА переводится в положения 1 или 2. В положении 1 двигатель работает на искусственной характеристике, соответствующей наличию в цепи якоря резисторов Rд2 + Rд3, а в положении 2 —на характеристике, обусловленной резистором Rд3.
Самые простые схемы управления вращением двигателя постоянного тока

Электрика для начинающих
Начинающим радиолюбителям наверняка интересен вопрос изоляции транзистора (одного или группы) на радиаторе. Если рассматривать

Интересное
Для изготовления приспособления, которое позволит бесконтактно включать и выключать свет в комнате, потребуется не

Своими руками
Карманный автономный паяльник, работающий от одной литий ионной батарее, удобное решение, как говорится,

Мужик в доме
Содержание1 Двигаемся навстречу воде 2 Рециркуляция 3 Высокое давление в скважине 4 Тандем водокачек

Аккумуляторы и батареи
Всем привет, мы давно не делали индикаторы разряда автомобильного аккумулятора. Но в этой статье

Аккумуляторы и батареи
Содержание1 Вариант 12 Вариант 23 Вариант 34 Итог Многие самодельные блоки имеют такой недостаток,
Блок управления двигателем постоянного тока / Блог им. Sayron / Блоги по электронике
В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя.В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования.
Блок управления состоит из следующих узлов:
— СИФУ (Система Импульсно — Фазового Управления)
— Регулятор
— Защита
Принципиальная схема привода приведена ниже.
Крупнее
Рассмотрим схему поподробнее.
Итак, СИФУ (Система Импульсно — Фазового Управления) — преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» — DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0».
Ниже представлены осциллограммы, поясняющие принцип работы.
Сверху вниз: КТ1, КТ2, КТ3.
Схема была просимулированна в программе Multisim 11. Вот файл проекта. Можно скачать, запустить и посмотреть как работает данный узел.
Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2.
Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.
Вот осциллограммы.
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ — S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке — «земля», R13, — С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.
Теперь рассмотрим принцип работы регулятора оборотов.
Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.
Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
На этом графике представлена зависимость оборотов двигателя от напряжения задания.
Значения оборотов двигателя даны для примера.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.
Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.
СХЕМА ЗАЩИТЫ
Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его.
Силовая часть блока управления.
Схема силовой части представлена ниже
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2
и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя.
Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом:
1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить
в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий
вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.
2. Использовать датчик якорного напряжения. Схема приведена ниже.
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)
Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.
Настройка
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.
Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя.
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Данный блок управления изготавливался для расточного станка. Вот фото этого монстра
На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.
Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке.
Вот смонтированный блок управления в силовом шкафу станка
На другой стороне силового шкафа был установлен маленький пульт управления.
На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было.
Схемы и перечень элементов
Подборка схем регулятора оборотов двигателя постоянного тока
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания резистор. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.
Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).
Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Радиоаматор, 4/2008
Регулятор скорости вращения двигателяШИМ: 0%-99%, напряжение: 5…16 В, ток: 10A….
Регулятор оборотов коллекторного двигателяМощность: 400 Вт, обороты: 90-1400 об/мин, 220В/50Гц…
Работа и схемы электродвигателей постоянного тока
Моторы, работающие на постоянном токе редко встречаются в домашнем хозяйстве. Но они всегда стоят во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. п. Двигатели постоянного тока (ДПТ) устанавливаются в автомобилях: в вентиляторах и различных приводах. Они почти всегда используются на электротранспорте и реже в производстве.
Преимущества ДПТ по сравнению с асинхронными моторами:
- Хорошо поддаются регулировке.
- Отличные пусковые свойства.
- Частоты вращения могут быть более 3000 об/мин.
Недостатки ДПТ:
- Низкая надежность.
- Сложность изготовления.
- Высокая стоимость.
- Большие затраты на обслуживание и ремонт.
Далее Я постараюсь кратко и доступно в одной статье изложить схемы, принципы работы, регулировки и реверса двигателей постоянного тока.
Принцип действия электродвигателя постоянного тока
Устройство двигателя аналогично синхронным двигателям переменного тока. Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье.
Любой современный электромотор работает на основе закона магнитной индукции Фарадея и «Правила левой руки». Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора.
Нижняя часть будет выталкиваться вправо, а верхняя – влево, поэтому якорь начнет вращаться до момента пока части якоря не поменяются местами. Для создания непрерывного вращения необходимо постоянно менять местами полярность обмотки якоря. Чем и занимается коллектор, который при вращении коммутирует обмотки якоря. Напряжение от источника тока подается на коллектор при помощи пары прижимных графитовых щеток.
Принципиальные схемы электродвигателя постоянного тока
Если двигатели переменного тока довольно просто подключаются, то с ДПТ все сложнее. Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Чаще всего у средних и мощных моторов постоянного тока есть в клеммной коробке отдельные выводы от якоря и от обмотки возбуждения (ОВ). Как правило, на якорь подаётся полное напряжение электропитания, а на обмотку возбуждения -регулируемый ток реостатом или переменным напряжением. От величины тока ОВ и будут зависеть обороты ДПТ. Чем он выше, тем быстрее скорость вращения.
В зависимости от того как подключен якорь и ОВ, электродвигатели бывают с независимым возбуждением от отдельного источника тока и с самовозбуждением, которое может быть параллельным, последовательным и смешанным.
На производстве применяются двигатели с независимым возбуждением ОВ, которая подключается к отдельному от якоря источнику питания. Между обмотками возбуждения и якоря нет электрической связи.
Схема подключения с параллельным возбуждением по своей сущности аналогична схеме с независимым возбуждением ОВ. С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Моторы с последовательным возбуждением применяются, когда необходим большой пусковой ток, мягкая характеристика. Они применяются а трамваях, троллейбусах и электровозах. По этой схеме обмотки возбуждения и якоря подключаются между собой последовательно. При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений. Поэтому для безотказной работы необходима постоянная нагрузка на вал.
Иногда применяются ДПТ со смешанным возбуждением, при котором одна обмотка ОВ соединяется последовательно якорной цепи, а другая параллельно. В жизни редко встречается.
Реверсирование двигателей постоянного тока
Что бы изменить направление вращение ДПТ с последовательным возбуждением необходимо поменять направления тока в ОВ или обмотке якоря. Практически, это делается изменением полярности: меняем плюс с минусом местами. Если же поменять одновременно полярность в цепях возбуждения и якоря, тогда направление вращения не изменится. Аналогично делается реверс и для моторов, работающих на переменном токе.
Реверсирование ДПТ с параллельным или смешанным возбуждением лучше производить изменением направления электрического тока в обмотке якоря. При разрыве обмотки возбуждения, ЭДС достигает опасных величин и возможен пробой изоляции проводов.
Регулирование оборотов двигателей постоянного тока
ДПТ с последовательным возбуждением проще всего регулировать переменным сопротивлением в цепи якоря. Регулировать можно только на уменьшение числа оборотов в соотношении 2:1 или 3:1. При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе. В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
ДПТ с параллельным возбуждением так же можно регулировать частоту оборотов вниз при помощи сопротивления в цепи якоря, но не более 50 процентов от номинала. Опять же будет нагрев сопротивления из-за потерь электрической энергии в нем.
Увеличить же обороты максимум в 4 раза позволяет реостат в цепи ОВ. Самый простой и распространенный метод регулировки частоты вращения.
На практике в современных электромоторах данные методы регулировки из-за своих недостатков и ограниченности диапазона регулирования редко применяются. Используются различные электронные схемы управления.
Устройство управления двигателем постоянного тока
При включении и выключении двигателей постоянного тока (ДПТ), работающих в паре с пластмассовыми редукторами, возникает удар, который постепенно разрушает редуктор. Предлагаемое устройство позволяет плавно подавать и снимать нагрузку с редуктора, и может быть использовано для регулировки скорости в ДПТ, плавного пуска и остановки ДПТ, например, при закрытии/открытии жалюзи, подъема/опускания ролетов и в других т.п. устройствах.
Детский электрический автомобиль
Устройство разработано для детских электрических автомобилей с питанием от аккумуляторной батареи 6 В 10 А*ч. Автомобиль управляется по радиоканалу с пульта управления, находящимся в руках родителя, идущего рядом с автомобилем. Для того чтобы маленькие дети не пугались при движении с большой скоростью, устройство снабжено переключателем скоростей. Поскольку в устройстве применено питание двигателя импульсами ШИМ, то скорости переключаются подачей на ДПТ импульсов с заполнением 50%, 60%, 80% и 100%.
Алгоритм работы
Предлагаемое устройство разрабатывалось с условием минимального изменения в электрической схеме автомобиля.
Устройство разработано на микроконтроллере РIС16F676. Алгоритм работы программы микроконтроллера показан на рис.1. После пуска и инициализации микроконтроллера определяется установленная скорость и включается флаг выбранной скорости. Далее определяется направление движения: прямой ход, реверсивный ход, либо отсутствие движения — стоп, и устанавливаются соответствующие флаги направления.
Рис. 1
Если направление движения не выбрано, то сигнала «Пуск» нет, и программа переходит на ожидание прерывания. Если «Пуск» включен, то по флагу определяется направление движения и отрабатывается прямой ход или обратный.
Длительность управляющего импульса пуска при прямом и обратном ходе формируется одинаково, но на разные выходы. Один выход, который включает «земляной» провод двигателя, включается сразу, а на втором выходе длительность импульса включения увеличивается после каждого прерывания. Чем большее число прерываний произошло с момента начала пуска, тем на большее значение увеличивается длительность импульса.
Реализовано это с помощью подпрограммы задержки 37 мкс, умноженное на число регистра «сек», имеющего переменное значение, и изменяющееся после каждого прерывания. Прерывание по переполнению таймера ТМR0 происходит через 4 мс, делится делителем на 10 и увеличивает счетчик «сек». Таким образом, счетчик «сек» увеличивается на единицу через 40 мс. Значение этого счетчика при пуске выбрано равным 55, но может быть изменено пользователем в любую сторону. При данном значении счетчика «сек» время пуска равно 2,25 с, а длительность импульса плавно увеличивается до 75% полной мощности двигателя.
После отработки части пуска ожидается прерывание, и, если пуск еще не завершен, программа возвращается на определение скорости и направления. Если пуск выполнен, то программа отрабатывает выбранную скорость с частотой ШИМ, равной 125 Гц. Отработка скорости выполняется аналогично отработке пуска, но с постоянным временем задержки. Но если при пуске время задержки увеличивает длительность выходного импульса, то при работе время задержки определяет длительность паузы. Это необходимо для того, чтобы при отработке «стопа» еще больше увеличивать время паузы, сокращая таким образом длительность выходного импульса.
Если включен флаг «стопа», то при прерывании изменяются значения делителей. Делитель на 10 становится делителем на 1, а значение регистра «сек» может принимать значение либо 50, либо 70. Это зависит от включенного флага скорости. При скорости 50% регистр «сек» принимает значение 50, так как при больших значениях происходит перерегулировка и длительность паузы становится больше длительности импульса работы. При этом вместо того, чтобы уменьшать значение длительности импульса, она начинает возрастать. При таких значениях регистра «сек» время остановки двигателя равно 0,2 с (оно может быть изменено пользователем в любую сторону уменьшением или увеличением до 255 значения регистра «сек»), а длительность выходного импульса плавно уменьшается до нуля.
После отработки длительности импульса скорости или стопа программа повторяется с определения скорости.
Работа устройства
Принципиальная электрическая схема устройства показана на рис.2. Выходы микроконтроллера DD1 RC0-RC3 управляют ключами VT1-VT4, которые открывают полевые транзисторы VT5-VT8, подающие напряжение в необходимой полярности на двигатель постоянного тока М1. На входы RA4, RA5 ИМС DD1 через переключатели SA1, SA2 подается лог. «0», определяя выбранную скорость. Программно входы RA4, RA5 подтянуты внутренними резисторами микроконтроллера к плюсу питания. Значения выбранных скоростей в зависимости от состояния входов приведены слева внизу на рис.2.
Рис. 2
На входы RC4, RC5 также подается напряжение от БУ автомобиля, определяя выбранное направление движения. Поскольку при полностью заряженной аккумуляторной батарее (АКБ) автомобиля напряжение на ней превышает максимально допустимое для входов микроконтроллера, то установлены делители напряжения R2, R9 и R3, R8.
Вначале был изготовлен вариант устройства с питанием от АКБ автомобиля, но при уменьшении напряжения на АКБ вследствие ее разряда полевые транзисторы открывались не полностью, и их внутреннее сопротивление увеличивалось. Увеличивалось и падение напряжения на транзисторах, и они грелись. Поэтому для питания микроконтроллера и ключевых транзисторов была установлена дополнительная батарея GB1 с напряжением 9 В. Стабилизатор напряжения DA1 необходим только для питания ИМС микроконтроллера DD1. Потребляемый ток от батареи GB1 составляет 15…25 мА. Меньшее потребление тока будет при максимальной скорости вращения двигателя.
Конструкция и детали
Схема подключения устройства в сеть автомобиля показана на рис.3. Пунктиром показано штатное соединение. Под сиденьем автомобиля имеется ниша для второго АКБ и много свободно го места. Сняв сиденье и крышку ниши АКБ, увидите пару проводов, идущих от АКБ, и пару проводов, идущих к двигателю. Один провод, как правило, черный — «минусовой», а второй провод — красный (может быть и желтым, белым) — «плюсовой». В назначении проводов можно убедиться, посмотрев на клеммы АКБ. Провод, идущий от БУ к двигателю, необходимо отпаять от двигателя и припаять к плате. Поскольку провод толстый, то лучше предварительно припаять к нему тонкие провода, которые легко паять к плате. Провода питания, идущие от АКБ к плате и от платы на двигатель, необходимо брать сечением не менее 1 мм2. Выключатель напряжения SA3 лучше установить на крышке ниши АКБ под сиденьем или сзади корпуса автомобиля. Разводку 9 В питания можно выполнить любым монтажным проводом. Батарею GB1 и плату можно закрепить в любом удобном месте.
Рис. 3
Печатная плата устройства и схема расположения элементов показаны на рис.4 и рис.5 соответственно.
Рис. 4
Рис. 5
МОSFЕТ-транзисторы \/Т5-\/Т8 могут быть любыми импортными с буквенным индексом L, с током стока не менее 10 А или отечественные с аналогичными параметрами. Чем больше допустимый
ток стока, тем меньших размеров нужен радиатор для транзистора. При 10-кратном запасе по току, радиатор может вообще не понадобиться. Конечно, это при условии, что транзистор открывается полностью. Большую нагрузку испытывают транзисторы, работающие в ключевом режиме, т.е. VT7, VТ8.
Транзисторы VT1-VT4 могут быть любыми структуры n-р-n. Переключатели скоростей SА1, SА2 лучше заменить одним движковым и установить его на передней панели автомобиля. В качестве батареи GB1 лучше применить 2 батареи типа 3R12, которых хватит на весь сезон.
Работа с устройством
Перед подачей напряжения на БУ автомобиля, необходимо подать напряжение на плату устройства. Напряжение питания 6 В и 9 В на плату должно подаваться одновременно. При движении вперед и переключении назад сначала отрабатывается время стопа, затем время пуска в выбранном направлении. При выключении движения отрабатывается время стопа, а при включении — время пуска.
Скачать файлы abtou.asm и abtou.hex, а также печатная плата в формате .lay
Автор: Николай Заец, г. Азов, Ростовской обл.
Источник: Радиоаматор №5, 2015