


Контроллер на L297 и L298
Технические характеристики контроллера шаговых двигателей на L297 и L298
Управление через LPT интерфейс, посредством логических сигналов — Step & Direction
Тип двигателя -шаговый биполярный четырехфазный
Допустимые параметры двигателей- 46 В, 2А
Колличество подключаемых двигателей-3
Максимальная входная частота сигнала Step — 16 кГц
Частота ШИМ- 20кГц
Размер 90Х110 мм
Посмотреть описание L298N datasheet
| Интерфейсный разъем DRB-25 |
Названия осей X, Y, Z условно. Оси абсолютно равнозначны и могут использоваться на Ваше усмотрение
| Кабель называется «Удлинитель принтера» |
Размещение элементов и перемычек на плате
Использование L297 и L298 приводит к упрощению конструкции платы и минимизации числа компонентов. Кроме того, соединение этих двух чипов образует мощную плату контроллера, способную выдерживать до 36 В и 2 А на канал. На основании этого можно применить электродвигатели, рассчитанные на напряжение питания 4,5 В при токе 1,4 А на канал с разрешением 2° на шаг. Номинальная мощность находится в допустимых пределах.
Для активизации схемы сигнал, задающий направление вращения, от параллельного порта компьютера подается на вывод 17 микросхемы L297, а задающий количество шагов — на вывод 18. На вход микросхемы L298 подаются управляющие сигналы от L297, которые задают последовательность переключения обмоток, что определяет вращение двигателя, а микросхема L298 обеспечивает питание моторных обмоток в надлежащем порядке. Обратите внимание, что для питания обеих микросхем необходимо наличие питания напряжением 5 В. Восемь диодов FR304 подключают обмотки двигателя к соответствующим выводам микросхемы L298. Заметим, что необходимо использовать диоды с накоплением заряда, что защитит микросхему от наведенных высоких напряжений, возникающих в момент, когда какая-либо из обмоток выключена. По своим параметрам диоды могут различаться в зависимости от мощности, потребляемой электродвигателем. Мощность, в свою очередь, определяет ток, протекающий через диоды.
|
С1,C8,C9 — 3,3pF C5,C6,C7 — 470mF C2,C3, C4 — 100pF R1, R2, R6, R7, R8, R9 — 200 Om R3,R18,19 — 22k D1-21-1N1001(FR304) R5, R10, R12 — 22k R4, R11,R13 — 10kOm (переменные) R15, R16, R17 — 4.7k T1 — IRLZ24N R14 — 100 Om RN1-RN2- 4,7kOm |
Таблица Назначение выводов
|
№ |
Обозначение |
Функция |
|
1 |
SYNC |
Вывод на чипе генератора прерывателя. SYNC соединены у всех L297s, которые для синхронизации связаны вместе, и компоненты генератора удалены на всех кроме одного. Если используется внешний источник часов, это учтено |
|
2 |
GND |
Заземление |
|
3 |
НОМЕ |
Открытый вывод коллектора, который указывает, когда L297 находится в его начальном состоянии (ABCD=0101). Транзистор является открытым, когда сигнал активный |
|
4 |
А |
Фаза А двигателя возбуждает сигнал для мощного каскада |
|
5 |
Активный низкий уровень запрещает управление драйвером фаз А и В. При задействовании биполярного моста этот сигнал может использоваться, чтобы гарантировать быстрый спад тока нагрузки, когда обмотка не возбуждена. Также используется прерыватель, чтобы регулировать ток нагрузки, если уровень вывода CONTROL низок |
|
|
6 |
|
Фаза В двигателя возбуждает сигнал для мощного каскада |
|
7 |
С |
Фаза С двигателя возбуждает сигнал для мощного каскада |
|
8 |
Активный низкий уровень запрещает управление возбуждением фаз С и D. Функции аналогичны INh2 |
|
|
9 |
D |
Фаза D двигателя возбуждает сигнал для мощного каскада |
|
10 |
ENABLE |
Чип допускает ввод. Когда уровни INh2, INh3 низкие (неактивные), уровни А, В, С и D также низкие |
|
11 |
CONTROL |
Вывод управления, определяющий действие прерывателя. При низком уровне прерыватель действует на INh2 и INh3; при высоком прерыватель выравнивает фазы А, В, С, D |
|
12 |
VS |
Вход напряжения питания +5 В |
|
13 |
SENS2 |
Ввод для тока нагрузки считывает напряжение от мощных каскадов фаз С и D |
|
14 |
SENS1 |
Ввод для тока нагрузки считывает напряжение от мощных каскадов фаз А и В |
|
15 |
Vref |
Опорное напряжение для схемы прерывателя. Напряжение, приложенное к этому штырьку определяет пиковый ток нагрузки . |
|
16 |
OSC |
Цепь RC (R, Vcc, С к земле), связанная с этой клеммой, определяет норму прерывателя. Клемма заземлена на всех соединенных микросхемах L297 кроме одной. f≈1/0,69rc |
|
17 |
CW/ |
Направление почасовой или против часовой стрелки управляется входом. Физически направление вращения двигателя также зависит от подключения обмоток. Поэтому при внутренней синхронизации направление может быть изменено в любое время |
|
18 |
Время шага. Активный отрицательный импульс на этом входе продвигает моторное приращение. Шаг происходит на положительном перепаде этого сигнала |
|
|
19 |
HALF/ |
Этот вход определяет режим. Высокий уровень выбирает режим половины шага, низкий уровень — полного шага. Одна фаза в режиме полного шага получается при выборе FULL, когда преобразователь L297s — в четной позиции. Две фазы в режиме полного шага, при выборе FULL, когда преобразователь — в нечетной позиции. |
|
20 |
Сброс ввода. Активный импульс низкого уровня на этом вводе возвращает преобразователь в исходную позицию (положение 1, ABCD=0101). |
Выводы 1 и 15 микросхемы L298 подключены через два силовых резистора сопротивлением 0,2 Ом к общему проводу. Резистор, подключенный к выводу 1, соединен с одной из двух обмоток возбуждения, а подключенный к выводу 15 — со второй обмоткой. Это дает возможность контроллеру L297 измерять ток, который протекает внутри двигателя. Микросхема L297 также измеряет напряжение между этими резисторами и на его основе задает режим модуля ШИМ, используемого для контроля тока в обмотках электродвигателя.
Резисторы R4 и R6, подключенные к выводу 15 микросхемы L297, работают как делитель напряжения и задают уровень, при достижении которого на обмотках возбуждения микросхема L298 вырабатывает сигнал об их отключении, что позволяет диодам разгрузить обмотку возбуждения. Она остается выключенной до окончания временной паузы, которая задается микросхемой L297.
Резистор R3 и конденсатор С1, подключенные к выводу 16 L297, задают тактовую частоту работы микросхемы. Конденсаторы С5, С6 и С7 фильтруют цепи питания электроники и двигателей.
Х2 обеспечивает питание схемы и электродвигателей.
Для синхронизации работы всех двигателей нужно соединить перемычкой 1 ногу всех схем L297.
|
Разъем питания VCC – напряжение питания двигателя |
Подключение двигателей
| Восьми выводной униполярный двигатель |
| Шести выводной униполярный двигатель |
| Четырех выводной биполярный двигатель |
|
Подключение шпинделя и концевиков |
| Подключение вентилятора |
Програмное обеспечение Kcam4, Master5, JalaCNC, Mach2 и др. с управлением по LPT
ПРЕДУПРЕЖДЕНИЕ. Все подключения выполнять при отключенном напряжении питания компьютера и контроллера.
Перед использованием контроллера необходимо его настроить под имеющиеся шаговые двигатели. Необходимо установить максимальный ток двигателей. Устанавливается подстроечными резисторами (соответствие подстроечного резистора для каждого двигателя смотрите на схеме размещения элементов).
Выполняется следующим образом.
Для начала необходимо проверить печатный монтаж (наличие непропаев, отсутствие замыкания). Потом без впайки 298-х подать 5 вольт (ток потребления не должен превышать 100 миллиампер на канал. Далее выставляешь напряжение на 15 ноге не более 0,3 вольта и уже (если все в порядке впаиваешь 298). Ток потребления на 3-х каналах не должен превышать 250 милиампер. Только потом можно подключить двигатели и подать «высокое» напряжение.
На среднем контакте подстроечника установить напряжение ( вращением движка подстроечника , двигатели пока не подключать) найденное по формуле: U=I*R, где I-максимальный ток двигателя (например, для ДШИ-200-1 1.5А), R-сопротивление резистора в омах (0.2). Настройку необходимо выполнить для каждого двигателя. К контроллеру допускается одновременно подключать шаговые двигатели разной марки. Можно подключать не все четыре двигателя, а столько сколько нужно.
скачать 3ax_lpt-l297-l298.pdf
Запуск униполярного двигателя с ИС L298N или L6202
Иногда требования дизайна ограничивают выбор двигателей, хотя такое решение не является оптимальным. Когда проектировщик ищет высокоинтегрированное устройство управления с улучшенными эксплуатационными качествами, но вынужден использовать униполярный (6-контактный) электродвигатель, возможно применение таких устройств как, L298N или L6202. Для запуска электродвигателя его центральный отвод следует оставить неподключенным, а два вывода обмоток подключить к выводам моста, как показано на рисунке. При использовании такой конфигурации происходит явное увеличение вращающего момента для того же тока катушки или получается такой же вращающий момент при меньшем токе.
| Запуск униполярного двигателя с использованием биполярного привода |
Система, при которой для управления униполярным двигателем используется ИС L298N или L6202, а центральный вывод Каждой катушки подключается к источнику электропитания, работать не будет. Во-первых, защитные диоды, включенные между коллектором и эмиттером (стоком и истоком) мостовых транзисторов, будут испытывать прямое смещение от трансформаторного действия обмоток двигателя, создавая короткое замыкание источника. Во-вторых, даже если напряжения питания разделены, L298N не может использоваться без высоковольтного источника питания, так как часть тока возбуждения для выходного моста берется от этого источника.
Выбор между прерыванием сигнала или фаз
Существует несколько способов осуществления прерывистого регулирования тока в шаговом двигателе. Мостовой вывод (L6202 или L298N) может управляться прерыванием сигнала включения, однофазным или двухфазным прерыванием, как показано на рис. 2.68-2.70. Микросхема L297 обеспечивает прерывание сигнала включения или однофазное прерывание, выбранное управлением входа. Если четыре вывода присоединены к четырем входам моста, L6506 обеспечивает однофазное прерывание с контуром рециркуляции в нижней части моста, а если ко входам подключены нечетные выводы включения — прерывание включения. Выбор правильного режима прерывания является важным моментом, который влияет на стабильность системы, а также на потери энергии. В табл. показано относительное сравнение различных режимов для постоянной частоты прерывания, тока электродвигателя и его индуктивности.
| Двухфазное прерывание |
| Однофазное прерывание |
Таблица Сравнительные преимущества режимов прерывания
|
Режим прерывания |
Пульсирующий ток |
Потери на электродвигателе |
Потери моста |
Минимальный ток |
|
Прерывание сигнала включения |
Сильный |
Большие |
Большие |
Низший |
|
Однофазный |
Слабый |
Маленькие |
Минимальные |
Слабый |
|
Двухфазный |
Сильный |
Маленькие |
Маленькие |
IPP/2 |
| Прерывание сигнала включения |
Прерывистый ток
Так как скорость изменения тока напрямую связана с напряжением, приложенным к катушке, соотношением прерывистый ток будет определяться частотой прерывания и напряжением на катушке. Когда катушка включена, напряжение на ней постоянно равно напряжению источника минус напряжение насыщения управляющего устройства. С другой стороны, напряжение на катушке в течение рециркуляционного периода зависит от выбранного режима прерывания.
При прерывании сигнала Включения или однофазном прерывании напряжение на катушке в течение рециркуляционного периода равно напряжению VF диодов или IR ДМОП-устройств (при использовании L6202 в режиме двухфазного прерывания). В этом случае наклоны кривых роста и спада тока примерно одинаковы, прерывистый ток может возрасти.
При использовании режима однофазного прерывания в течение рециркуляционного периода напряжение на катушке равно оставшемуся напряжению VQN (VSAT. для биполярных устройств или IxRDSon для ДМОП-устройств) транзистора плюс напряжение VF одного диода плюс падение напряжения на резисторе считывания, если он находится в контуре рециркуляции. В этом случае ток затухает намного медленнее, чем нарастает, и пульсирующий ток меньше, чем в предыдущем. Эффект становится более значимым при высоких напряжениях питания.
Потери в электродвигателе
Потери в электродвигателе включают в себя резистивные (I2R) и паразитные потери на вихревых токах. С ростом прерывистого тока и частоты последние обычно увеличиваются. Прерывание сигнала включения или двухфазное прерывание служит причиной роста температуры электродвигателя. Как правило, меньшие потери достигаются использованием однофазного прерывания.
Потери энергии в мостовой интегральной схеме
Внутренняя схема управления в микросхеме L298N обеспечивает активное выключение устройств выхода, когда они переключаются в ответ на четыре фазовых входных сигнала. Однако при переключении в ответ на сигналы включения в устройствах выхода снимается все базовое возбуждение, а в схеме нет активного элемента, который устранил бы накопленный заряд из базы. В процессе прерывания сигнала включения время спада тока в силовых устройствах дольше, чем при использовании прерывания фаз, поэтому при переключении потери также будут большими.
В ответ на входной сигнал или сигнал включения внутренняя логическая схема управления в микросхемах L6202 и L6203 действует одинаково, поэтому при использовании прерывания сигнала включения или фазового прерывания потери равны. Их можно уменьшить, применив прерывание одной фазы. Тем не менее, потери, обусловленные падениями напряжения на концах устройства, не одинаковы. Во время прерывания сигнала включения все четыре выходные ДМОП-устройства выключены, ток рециркулирует от корпуса к диодам утечки выходных ДМОП-транзисторов. При фазовом прерывании ДМОП-устройства включены и проводят ток в обратном направлении. Поскольку падение напряжения на концах ДМОП-устройств меньше прямого падения напряжения на диоде при токах менее 2 А, ДМОП-устройства отбирает значительный ток, и рассеяние мощности при использовании прерывания фаз принимает гораздо меньшие значения, чем при прерывании сигнала включения, что может быть видно из графиков в проспектах изделий.
Для этих устройств прерывание фаз всегда сопровождается меньшими потерями в устройстве. Чтобы определить, какие потери — переключения или насыщения — меньше для дискретных мостов, их необходимо вычислить.
Вычисление мощности рассеяния на мостовых микросхемах управления
Мощность, рассеиваемая на монолитных интегральных схемах управления (L298N или L6202), является суммой трех составляющих: потерь в статическом режиме, потерь насыщения и коммутационных потерь.
Потери в статическом режиме — это потери цепей смещения в устройстве, которые можно вычислить по формуле Vsxls, где Vs — напряжение источника питания, a Is — ток смещения или покоя источника. Если в устройстве используются два напряжения питания, например для L298N, необходимо высчитать потери для каждого и сложить их для получения общих потерь в статическом режиме. Обычно ток покоя большинства микросхем при большом диапазоне входных напряжений одинаков, и его максимальное значение, указанное в проспекте, можно использовать для напряжений питания в пределах допустимого интервала.
Потери насыщения — это сумма произведений падения напряжения на протекающий ток в каждом из выходных резисторов. Для биполярных устройств (L298N): VSATxI. Для силовых ДМОП-устройств: I2xRDSon.
Третьим основным компонентом потерь является коммутационная составляющая, связанная с устройствами вывода. В общем случае она может быть вычислена как:
Vsupply х Iload x tcross x fswitch
Чтобы подсчитать общие потери, составляющие формулы, вычисленные по их соответствующим рабочим циклам, складываются. Рабочий цикл тока покоя равен 100%.
Минимальный ток
Значение минимального тока, который можно стабилизировать, является важным при работе с очень маленькими шагами, многоуровневом управлении током или попытке стабилизировать ток, очень малый по сравнению с максимальным, возникающим при прямом подключении электродвигателя к используемому напряжению питания.
При использовании прерывания сигнала включения или фазового прерывания единственной проблемой является потеря возможности регулирования тока ниже минимального значения. На рисунке показана типовая характеристика чувствительности для выходного тока как функции от опорного уровня.
| Типовая характеристика чувствительности для выходного тока как функции от опорного уровня |
Минимальное значение задается характеристиками двигателя (главным образом, сопротивлением обмоток), напряжением питания и минимальным рабочим циклом, доступным при использующейся схеме управления. Минимально возможный ток течет по обмотке при запуске на минимальном рабочем цикле. Регулирование тока ниже этого значения невозможно. Когда прерывается сигнал включения, ток, текущий через катушку, может возвращаться к нулевому значению при каждом цикле, как показано на рисунке.
| Зависимость тока, проходящего через электродвигатель, от времени прерывания |
При прерывании одной фазы ток может обратиться, а может и не обратиться в нулевое значение, также возможна остаточная составляющая постоянного тока.
При использовании устройств управления с постоянной частотой (L297 или L6506) минимальный рабочий цикл — это рабочий цикл генератора, поскольку триггер поддерживает выходной сигнал, пока генератор активен. В нестабильных по времени регуляторах, например PBL3717A, минимальное выходное время устанавливается по задержке распространения сигнала в цепи и его соотношению к выбранному времени нахождения в выключенном состоянии.
Ни одна из доступных управляющих микросхем не осуществляет режима прерывания двух фаз. Однако здесь он рассмотрен, поскольку очень легко создать токи, которые могут быть катастрофическими, если двухфазное прерывание используется совместно с методом обнаружения максимального тока. Когда максимальный ток меньше 1/2 прерывистого тока (Iрр), двухфазное прерывание может стать особенно опасным. В этом случае его реверсивная способность является причиной обратного тока в обмотке электродвигателя и потери контроля управляющей схемы. На рис. 2.73 показана форма колебания для данного случая.
| При двухфазном прерывании может быть утрачен контроль над током обмотки |
Когда ток достигает максимального значения, выключаются обе части моста, ток спадает до тех пор, пока не достигнет нулевого значения. Так как силовые транзисторы включены, он начинает расти в обратном направлении.
При новом включении триггера входы также активируются, и ток принимает положительное значение. Однако задачей единственного считывающего резистора является выпрямление тока, а компаратор учитывает только его значение, а не знак. Если абсолютное значение тока в отрицательном направлении выше заданного, компаратор будет обманут и сбросит триггер. Ток будет продолжать расти в отрицательном направлении, а схема стабилизации не сможет его контролировать.
По этой причине режим двухфазного прерывания с мостовыми схемами типа L298N и L6203 использовать не рекомендуется, он неосуществим ни в одной из легкодоступных управляющих интегральных схем. Эту проблему можно избежать, применив более сложную технику считывания, не спрямляющую обратный ток.
Стабильность прерывателя и звуковые шумы
Проблемой, с которой обычно сталкиваются при использовании прерывистой регулировки тока, является высокий уровень шума двигателя. В цепях с постоянной частотой широтно-импульсной модуляции это явление накладывает свой отпечаток на стабильность схемы управления током, в которой действующая частота прерывания сдвигается к субгармонике, задаваемой генератором. В схемах с одинаковым временем выключения оно серьезно изменяется по сравнению с устанавливаемым ждущим мультивибратором. Существуют две общие причины этого явления.
Первая причина связана с электрическими помехами и резкими увеличениями тока в системах, что может обмануть схему регулирования тока. В ШИМ-схемах детектирования максимума (L297 и L6506) ток электродвигателя контролируется путем наблюдения за падением напряжения на считывающем резисторе, соединенным с землей. При включении генератора внутренний триггер вызывает активацию выводов моста; обычно на этом резисторе происходит резкое повышение напряжения. Оно вызвано шумами в системе и восстанавливающимся обратным током рециркуляционного диода, который течет через считывающий резистор .
| Восстанавливающийся обратный ток рециркуляционного диода течет через резистор считывания, вызывая на нем повышение напряжения |
Если величины повышения достаточно для превышения эталонного напряжения, компаратор будет обманут и преждевременно сбросит триггер на нулевое значение, как показано на рисунке.
| Повышение напряжения на считывающем резисторе, вызванное восстанавливающимися обратными токами и шумами, может обмануть компаратор, контролирующий ток |
При этом выход отключается, и ток продолжает спадать. Результатом является уменьшение основной частоты колебания тока, подаваемой на двигатель, к субгармонике частоты генератора, которая обычно колеблется в диапазоне звуковых частот. На практике столкнуться с примером, в котором период колебания тока равен двум, трем и даже четырем периодам колебания генератора, практически невозможно. Эта проблема более заметна при вводе в эксплуатацию макетных схем, у которых не очень хорошо расположены заземления, а фоновый шум вносит свой вклад в повышение напряжения.
При использовании микросхем L6506 и L298N величина повышения теоретически должна быть меньше, поскольку восстанавливающийся обратный ток течет на заземление, а не через считывающий резистор. Тем не менее в приложениях, использующих монолитные мостовые устройства управления (L298N), паразитные структуры часто порождают всплески восстанавливающегося тока, сходные по характеру с обратным током диода, которые могут течь через эмиттерный контакт устройства, а следовательно и через считывающий резистор.
При использовании управляющих ДМОП-устройств (L6202) восстанавливающийся обратный ток всегда течет через считывающий резистор, поскольку внутренний диод, параллельный нижнему транзистору, подключен к ДМОП-устройству, а не к заземлению. В нестабильных по времени цепях управления типа PBL3717A шумовой выброс нарушает работу компаратора и повторно включает ждущий мультивибратор, увеличивая установленное время выключенного состояния на целое число.
У данной проблемы есть два решения. Первое — установка RC фильтра нижних частот между считывающим резистором и входом компаратора. Для типового шагового двигателя это требует установки четырех дополнительных компонентов. Второе решение — использовать доминирующую установку внутреннего триггера микросхем L297 или L6506, чтобы скрыть повышение. Для этого длительность синхронизирующего импульса генератора должна быть большей, чем сумма задержки на прохождение сигнала (для L298N она равна 2-3 мкс) и длительности повышения (обычно в пределах 100 не для удовлетворительных диодов с накоплением заряда), как показано на рисунке.
| Установка доминирующей фиксации на микросхеме L297 может быть использована для того, чтобы при переключении скрыть всплески напряжения на считывающем резисторе |
Когда этот импульс подается на вход триггера, любой сигнал, попадающий на вход сброса на компараторе, игнорируется. После окончания импульса компаратор сбрасывает триггер в нужный момент.
Решением проблемы в схемах с частотной модуляцией является установка времени запирания, в течение которого ждущий мультивибратор не перезапускается.
Лучший способ оценить стабильность цепи прерывания — остановить двигатель (удерживать минимальный синхросигнал микросхемы L297 или постоянные четыре входных сигнала на L6506) и посмотреть на кривую тока, которая не должна содержать фазовых сдвигов. Такая оценка каждого уровня регулируемых токов проводится дважды. Пробник, например устройство Tektronix АМ503, дает самую точную картину тока в электродвигателе. Если цепь работает стабильно, кривая тока по времени будет совпадать с синхронизирующим сигналом схемы управления. Так как рассмотренные ранее повышения в пределах от 50 до 150 не недолговременны, для оценки схемы необходимо использовать высокочастотный осциллограф с полосой пропускания 200 МГц. ИС L297 или L6506 предоставляют наилучший запускающий сигнал.
Другим фактором, который влияет на стабильность схем с постоянной частотой широтно-импульсной модуляции, является выбранный режим прерывания. На микросхеме L297 сигнал прерывания может быть приложен либо к входному сигналу включения, либо к входам четырех фаз. При прерывании входных сигналов включения путь рециркуляции проходит от заземления к нижнему рециркуляционному диоду, на нагрузку, затем на верхний рециркуляционный диод и обратно к источнику, как показано на рисунке.
Если не учитывать противоЭДС, напряжение на катушке во время включения t1, когда ток возрастает, и во время рециркуляции t2 вычисляется по формулам:
V1=Vs-2Vsat- VRsense
и
V2 = VSS +2VF
Время изменения тока задается выражением (без учета последовательного сопротивления):
Поскольку напряжение на катушке (V2) в процессе рециркуляции больше, чем напряжение (V1) на катушке во включенном состоянии, рабочий цикл будет больше 50%, потому что Ц должно быть больше t2. Когда во внимание принимается противоЭДС двигателя, рабочий цикл увеличивается, поскольку во время включения противоЭДС препятствует нарастанию тока.
При таком условии управляющая схема может стабильно функционировать на половине частоты генератора, как показано на рисунке.
| Когда выходной рабочий цикл превышает 50%, цепь прерывания может синхронизироваться субгармоникой частоты генератора |
Выходы выключаются, когда ток достигает заданного максимума. До момента включения триггера ток спадает, а затем снова начинает расти. Но поскольку t1 больше t2, он не успевает достичь максимума, когда с генератора приходит второй импульс. Поэтому второй импульс не действует, и ток продолжает расти, пока не достигнет установленного максимального значения, при котором компаратор сбрасывает триггер. Фактически схема управления током может функционировать в одном из двух стационарных режимов в зависимости от времени, за которое ток впервые достигает максимума.
Самое простое решение — наложение прерывающего сигнала на один фазный вход в режиме прерывания фаз, что осуществимо для микросхем L297 или L6506.
Другое решение, срабатывающее в некоторых случаях, — установка минимума рабочего цикла в пределах 30% путем подачи синхронизирующего сигнала на входы L297 или L6506. При такой конфигурации в течение каждого тактового интервала схема должна производить минимальный рабочий цикл. Это задаст более поздний момент времени, когда будет засечен максимальный ток, и частота прерывания засинхронизируется основной частотой. Принципиальным недостатком данного решения является большее значение минимального тока, который можно стабилизировать. В нескольких первых циклах прерывания Ток электродвигателя также стремится выйти за допустимый предел, поскольку реальный максимум при минимальном рабочем цикле не контролируется.
Влияние противоЭДС
ПротивоЭДС в шаговых электродвигателях стремится увеличить рабочий цикл управляющих схем прерывания, так как они мешают росту тока и способствуют его спаду. В крайних случаях (когда напряжение источника питания практически несравнимо с максимальной противоЭДС двигателя) требуемый рабочий цикл может превысить 50%. При этом возникает проблема стабильности рабочей частоты, рассмотренная выше.
В данном случае методику прерывания при постоянной частоте осуществить невозможно. Остается применить метод прерывания, в котором используется нестабильная по времени частотная модуляция, подобно выполненной в устройствах PBL3717A, ТЕА3717, ТЕА3718 и L6219.
Почему электродвигатель не работает
Начинающие пользователи прерывисто управляемых приводов обнаруживают, что при включении цепи электродвигатель не действует. Причина проста — не создается достаточный вращающий момент. Если при заданной скорости двигатель способен создавать требуемый вращающий момент, причина может скрываться в схеме регулирования тока. Как было сказано в предыдущем разделе, схема, контролирующая ток, может ошибаться. Иногда шумы настолько сильны, что реальный ток в электродвигателе близок нулю, и электродвигатель не создает вращающего момента. Другой причиной может стать недостаточный ток от источника питания.
Как избежать повреждений управляющего устройства
Многие пользователи спрашивают, почему устройства выходят из строя. Почти во всех случаях повреждения являются результатом электрических перегрузок (напряжениями или токами, вышедшими за допустимые пределы). Когда устройство дает сбой, необходимо внимательно оценить режимные параметры системы.
Часто повреждения вызываются переходным напряжением, создаваемым индукцией в электродвигателе. Правильно собранная система удерживает максимальное напряжение на источнике, коллекторе и эмиттере устройств выхода, а в микросхемах — на отрезках от одного вывода к другому в пределах максимального значения. Правильная схема содержит устройства фильтрации напряжения питания, фиксирующие диоды и/или демпфирующие устройства на выходе.
Очень важно грамотно выбрать фиксирующие диоды. Подходящий диод подбирается в зависимости от скорости переключающего устройства и поддерживает VF, которое сдерживает максимальное напряжение в допустимых пределах. Необходимо, чтобы характеристики внешних дискретных диодов и выходных транзисторов совпадали. Обычно для биполярных устройств выхода (L298N) использование диодов со временем восстановления меньше 150 не допустимо. Использовать 1N4001 не рекомендуется, потому диоды этой серии низкочастотные.
Избыточный ток также может испортить устройство, хотя это случается реже. В большинстве систем избыточный ток является результатом коротких замыканий в нагрузке. Если система склонна к коротким замыканиям, конструктор может продумать установку внешней защиты.
Следующей причиной для беспокойства является сквозной ток, который течет от источника к земле и обусловлен совместной проводимостью верхних и нижних транзисторов на мостовом выходе. Конструктивное исполнение устройств L298N, L293 и L6202 включает цепи для предотвращения этого явления. Пользователь никогда не спутает восстанавливающийся обратный ток диодов или паразитных структур со сквозным.
Далее рассмотрим модификации и изменения конструкции контроллера которые улучшают характеристики схемы.
| Передвинуты компонентами, добавлен стабилизатор питания питания +5В и индикатор наличия питания. |
| Контроллер UR3VCD V4.2 имеет основное отличие — это ключ управления шпинделем с динамическим торможением |
|
Схема ключа управления шпинделем Т1,Т2 любые маломощные транзисторы Т2 на напряжение КЭ не менее 40 В |
| Версия контроллера UR3VCD V4.3 — добавлена клемма цепи +5В, что позволяет запитать контроллер внешним напряжением +5В (исключив стабилизатор 7805 и баластный резистор), или на оборот подключить к контроллеру внешнюю слаботочную нагрузку по цепи +5В |
|
|
| Стабилизатор скорости вращения двигателя шпинделя |
| Четырехканальная UR3VCD V5.1 |
Контроллер шагового двигателя для станка с ЧПУ на L297+L298 (обмен опытом) — Железо — Компьютер и электроника к нему!!!
Собственно говоря идея уже не новая, исходник лежит тут: http://cxema.my1.ru/load/0-0-0-1935-20 данная схема обсуждалась много много раз, на многих форумах, для своего станка я выбирал именно её, но самая загвоздка оказалась в плате, то есть её вообще нигде не было, то что находил в просторах интернета было отвратного качества без возможности редактирования, пришлось плясать с бубном самому, и в конце концов родилось вот это: http://cxema.my1.ru/load/0-0-0-1936-20 развёл-спаял, фото готовой платы ниже.
По схеме произвёл следущие изменения: заменил диоды 1n4004 на 1n5819, добавлены в цепи питания конденсаторы на 220 мкф., к выводу 20 и к перемычкам jp1 и jp3 подвёл питание через резистор на 4,7 кОм, а не напрямую. Еще нужно будет уменьшить резистор R3, так как пищит двигатель (частота ШИМ приближённо высчитывается по формуле 1/0,7*R*C, при этом не рекомендуется ставить резистор сопротивлением ниже 10кОм) поэтому резистор в 22 кОм заменяем либо на 20кОм, либо на 18 кОм, при этом частота будет приблизительно 21600 и 24000 соответственно, что выходит за границы слыШИМого 🙂 диапазона
(ДОПОЛНЕНИЕ: был поставлен резистор 18 кОм — писк не исчез, возможно ошибка в формуле или ещё какие-то причины, но на этом экспериметы закончу, главное двигатель работает, на писк можно не обращать внимания).
Так как заменить резистор мне пока нечем, тестировал с писком в моторе, тест удачный, марка двигателя 4shg-023a (русский аналог — ДШИ-200), максимальный ток обмоток — 1,5 А, я крутил примерно на 1 ампер (движок подстроечника посередине) двигатель не греется, L298 тоже холодная.
Ещё в ходе тестов было замечено, что L297 сильно греется при подаче на вывод 11 высокого уровня (JP1), от уровня этого вывода зависит какими выводами будет управлять ШИМ: ABCD или INh2-INh3, в итоге я не стал выяснять причину нагрева и подключил вывод к массе.
Блестящий конденсатор на схеме на самом деле не должен был лежать, при разводке платы не подрасчитал (схема выложена доработанной)
Перемычка JP3 устанавливает режим работы двигателя: полный шаг-полушаг (протестировано: работает и так и сяк)
Максимальный ток, на который рассчитана микросхема L298 — 2 ампера, превышать не стоит, риск получить поджарку очень велик, испытывать драйвер без теплоотвода тоже не стоит — у меня одна горелка уже пылится (нагревалась намного выше 100 градусов)
Токосъёмные резисторы не обязательно должны быть 0,22 ома, ток регулируется подстроечным резистором, считаем по закону Ома: U=I*R, максимальный ток моего двигателя 1,5 А, допустим резисторы будут 0,5 ом, тогда напряжение которое нужно выставить будет равно 1,5*0,5=0,75 вольт, или конкретно для моей схемы: 1,5*0,22=0,33 вольт
Создание ЧПУ гравера с нуля [2]…
Всем привет.Очень рад, что первая часть про создание ЧПУ гравера получила неплохой отклик. Ну что же, тогда пожалуй продолжим.
Как обещал выкладываю 3d модель корпуса http://3dtoday.ru/3d-models/mechanical-parts/body/chpu_graver/
Сделан он в программе SketchUp. Замечание к модели:
1. Сегодня я бы поменял обязательно диаметр направляющих по оси Х, поставил наверное 16 или хотя бы 10мм, так как 8 мм прогибаются (при сильных нагрузках на ось) из за большой длины данной оси.
2. Еще можно незначительно, на 20 мм уменьшить ход по оси Z — взято с большим запасом.
3. Что касается использование резьбы и ходовых гаек, то как многие уверяют, за 2 месяца использование станка я не заметил люфтов. Но эту систему нельзя назвать быстрой!!! Меня это особо не останавливало из за дешевезны и доступности.
В остальном вполне рабочая модель для гравировки)))
Что касается драйверов, то как вы понимаете, такие как на 3d принтер не пойдут! Решил я делать их сам. Для этого выбрал связку l298+l297. Делить шаги я не стал, т.е. драйвер работает в режиме полного шага.
Сразу скажу, что проще и наверное логичнее было купить готовые драйвера, уж очень много я времени на это потратил))) Советую эти драйвера http://www.ebay.com/itm/Nema34-Stepper-motor-driver-DM860A-7-8A-256micsteps-24-80VDC-CNC-Router-LONGS-/151329396996?hash=item233bef5904:g:qFgAAOSwv1RUZBy4
Мозговой начинкой станет ардуино с прошивкой grbl 0.9. Еще понадобится блок питания — возьмем от старого системного блока. В результате получаем не сложную схему с соединением двумя сигналами управления с ардуино к шаговым двигателям (DIR,STEP) и возможностью управления станком с ноутбука или компьютера через usb.
Начнем с простого, старый блок питания разбираем, выпаиваем все ненужные провода, оставляя две массы и два провода +12В. Одни из которых пустим на питание драйверов, другие на питание шпинделя. Для запуска блока еще нужно зеленый провод припаять на массу (имитация кнопки включения системного блока) — цвет может отличаться, нужно смотреть конкретно по марке. Еще я прикрутил болтами М3 корпус блока питания к корпусу чпу и в месте где раньше выходила охапка проводов вставил тумблер для включения шпинделя.
Ардуино. Тут все тоже предельно просто. Прошиваем ее готовой прошивкой из архива (используя Xloader или через ISP) и подключаем согласно схеме: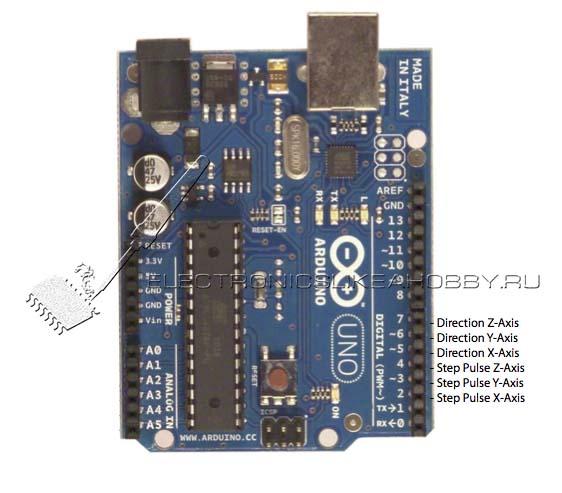 Теперь перейдем к драйверам. Схема драйвера для каждого двигателя:
Теперь перейдем к драйверам. Схема драйвера для каждого двигателя: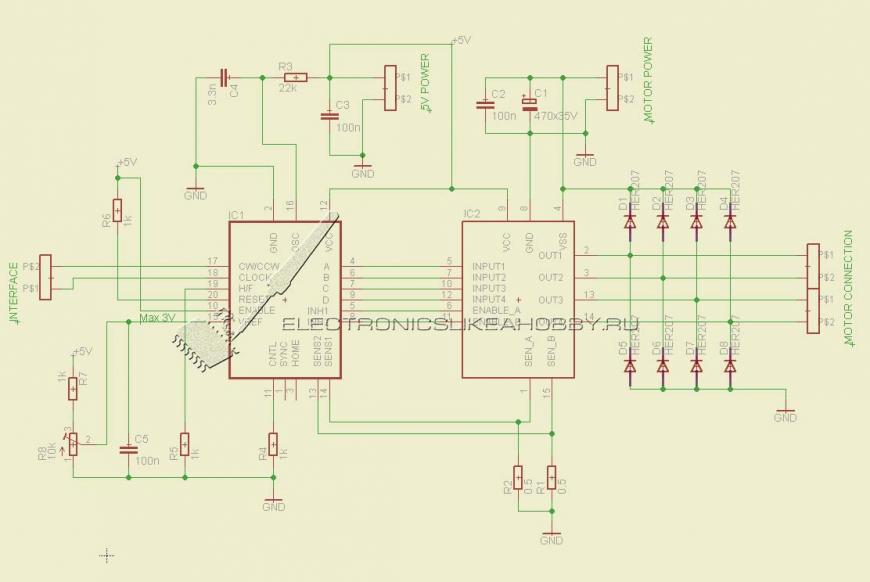
Микросхема l297 здесь служит промежуточным звеном между ардуино и двигателем. Она формирует сигналы для l298 для поворота двигателя вправо или влево. Контакт 17 используем как DIR, 18 — STEP. Соответственно при импульсе на 18 контакте l297 формирует сигналы для поворота влево или вправо (зависит от 17) на шаг или полшага (в зависимости от подключения контакта 19 — логический 0 или 1) и если на контакт 10 подана логическая 1, на контактах 4,6,7,9. Контакт 16 для подключения генератора. Reset 20 — подтягиваем к плюсу. Контакты 13,14 снимают напряжение с резисторов, далее значение сравнивается с Vref и при совпадении ток ограничивается (путем подачи соответствующих сигналов на enA и enB микросхемы l298). Так вот самое важное не превышать ток 2А разрешенный для l298 и не превышать значение максимального тока для мотора (он будет греться и долго не проживет). В моем случае мотор рассчитан на 1.5А. Тогда:
Vref = Imax*Rsen = 1.5*0.5 = 0.75В
Контакты 1,3,11 я не использовал. Не нужно забывать, что резисторы R, должны быть хотя бы на 2 Вт.
Теперь про l298. Эта схема является мощным сдвоенным H-мостом, т.е схемой позволяющей подать напряжение к нагрузке в разных направлениях. Очень хорошо принцип её работы описан тут.
Теперь немного о сборке, сначала собираем всю схему целиком кроме l297. Включаем питание 5В, смотрим не зашкаливает ли ток (не больше 20мА), если нет, то устанавливаем необходимое напряжение на Vref подстроечным резистором. После этого ставим l297 на место еще раз включаем 5 В, ток возрастает где то до 70мА — значит все пока верно. Проверяем диоды, не замыкают ли где не нужно на массу или плюс или между собой — а то спалим микруху. Проверки проведены можно подключать питание для двигателей, не забываем ставить хорошие радиаторы на l298. При подключении двигатель должен ‘застыть’ и на обе обмотки будет подано напряжения питания. Теперь можно управлять двигателем, посылая сигналы на DIR и STEP. Вот промышленный аналог такой же схемы.
Ниже пример работы (описание, установка и настройка софта в следующих постах):L297. Подводный камень. / Блог им. Fahivec / Сообщество EasyElectronics.ru
Здесь «камень» — не обозначение кристалла или микросхемы, как это звучит в жаргоне электронщиков, а именно то незаметное с поверхности препятствие, на которое можно напороться в легкомысленной самоуверенности.Вместо предисловия.
Заразился и я мечтой заиметь свою ЧПУ-сверлилку/фрезер. Пока с механикой дело продвигается уныло, решил тем временем поиграться с управлением шаговика, чтобы окончательно определиться со схемой. Шаговики собираюсь использовать униполярные от принтера. Облазил несколько форумов, прочитал и «хорошую статью», что в топике podkassetnik -а. В конце-концов решил не мудрить с МК и купил L297-е.
По рекомендациям решил применять ШИМ для стабилизации тока обмоток — тут уж L297-я как-раз в тему (хоть и старая, как пишут люди). Почитал, насколько смог понять, ее Т.О.(Datasheet) и набросал схемку.
Предвидя вопрос «а нафига набрасывать — есть же готовые и проверенные», сразу же на него и отвечу — теперь я почти так и сделаю.
Но собственно что же хотел написать? Дело в том, что есть у нее(L297) такой управляющий вход CONTROL, про который в Т.О. сказано:
Control input that defines action of chopper.Насколько я понял, можно ШИМ-мом рулить прямо по выходам ABCD. Вот опираясь на это «понятие» и родилась изначальная схемка:
When low chopper acts on INh2 and INh3; when high chopper
acts on phase lines ABCD.
Средний вывод обмоток двигателя на V+, естественно.
Сейчас мы не будем рассматривать вопрос управления полевиками без драйверов — суть не в этом!
Ну так вот, подключил я к этой, собранной на макетке, схеме движок, подал питание и стал крутить подстроечник, добиваясь регулировки тока. Движок шумел ШИМ-ом и грелся, как паяльник. При этом потребляемый ток увеличивался(!) при появлении ШИМ-а почти в 2 раза, по сравнению с его(ШИМ-а) отсутствием. Думаю, где ж я накосячил?
Стал смотреть, что же выдает L297 на полевики. Как и пишут в Т.О. после подачи питания и отсутствия сигнала STEP, состояние выходов ABCD соответствовало HOME, т.е. 0101 — это когда я движок подстроечника выкрутил в правое по схеме положение. т.е. на максимальный ток. А поскольку падение на RS (токоизмерительных шунтах) было ниже установленного Vref, то и ШИМ отсутствовал.
Ну хорошо, покрутил подстроечник до появления ШИМ-а (на время расследования я решил двигатель не жечь и заменил его резисторами по 100ом и увеличил сопротивление шунтов) и что вы думаете? Я просто не поверил своим глазам! ШИМ появился на выходах А и С, на которых до этого был лог.«0». Выходы B и D всё также оставались в лог.«1» без малейшего признака ШИМ-а! А это значит, что этим вот образом подключалась и вторая половина обмотки — вот откуда увеличение суммарного тока!
Давай еще раз читать Т.О. повнимательней, насколько это возможно с моим незнанием английского 🙂
Еще и еще раз прочесывал уже знакомые и еще незнакомые форумы — нигде ни намека на это положение вещей.
Конечно весь интернет я не прочесал — терпения не хватило.
Причем при подаче сигнала шага L-ка повторяла свое поведение в том же стиле. Напрашивается вывод — активное состояние выходов ABCD инверсное. Ну если так, то работа ШИМ-а правильная!
Ну кто же тогда дурак — я? Ведь ни в ДШ, ни в других статьях об этом ничего не сказано.
Не зря ведь люди ставят между L-кой и полевиками элемент «И» и рулят ШИМ-ом по /INH!
Только ведь никто этот момент не раскрывает почему-то.
Для чистоты эксперимента поставил я между L-кой и полевиками инверторы: ШИМ стал правильно регулировать ток нагрузки. Проверка на двигателе подтвердила, причем не только в покое, но и на разных скоростях вращения. Питал движок 12-ю вольтами, ток изменял в пределах 200-600mA, проверяя пальцами момент на валу.
Отступление:
Во время экспериментов почему-то убил два IRL530N (100V,17A). Диодов на обмотки двигателя пока не ставил, осциллографом видел выбросы до +36 вольт. Странно, почему же сдохли эти полевики (стояли в обмотке CD), после заменил их на IRF640 (что было) — без проблем. Вот теперь и сомневаюсь в применении сборок IRF7103 (50V,3A).
Ну хорошо, допустим ABCD — выходы инверсные, а как же тогда быть с ENABLE, ведь при отключении L297 этим сигналом выходы ABCD остаются в «нуле» — т.е. активные! Чего-то я не понимаю!
Нет, я теперь уж точно сделаю, как и другие — поставлю 7408(или 7409) и заведу ШИМ на /INH.
Проверено многими — надежный «велосипед»! 🙂
P.S. Проверил все три L-ки, поведение идентичное. Хотя может это одна партия такая?
..Партия у нас одна! (с)__________________________________________________________________________
Послесловие (19.02.2014)
Учись, синку, та читай багато,Да вот: учился мало и читал не то, что нужно. Вот и напоролся на грабли.
бо будеш ти дурнем, а я — твоїм татом.
Спасибо тов. steel_ne ,
После посильного изучения вопроса, кажется всё стало на свои места.
Вкратце:
L297 разрабатывалась в первую очередь для применения мостовых драйверов (биполярных) Ш.Д., хотя и меет возможность использования простых (не мостовых) ключей для управления униполярным Ш.Д.
При этом сигналом управления CONTROL выбирается функционал работы именно мостового драйвера (в частности, как я понял, управление скоростью спада тока обмоток). А для управления униполярным Ш.Д. этот сигнал имеет только одно определенное значение. О чем в обычном Т.О. (Datasheet) явно не сказано. Ссылка на него есть в коментариях.
Про спад тока обмоток пишет в своей статье Л.И.Ридико. К сожалению я не провел параллели между его изложением и поведением L297 в вышеописанном включении.
Ну чтож, на ошибках учатся.
Управление шаговым мотором. Силовая часть.
Дата: 22 Марта 2014. Автор: Алексей
Всем привет! Наконец-то пришла весна, потеплело и солнышко стало прогревать. Птички запели )) Ну ладно, хватит лирики. Продолжаю писать про шаговые двигатели. А точнее не про них, а как я с ними работаю. Может кому-то будет полезно, а кому нет, решать вам. Поехали. В прошлой статье я писал как подключить ШД к силовому драйверу на базе микросхемы L298N. Получил я тут на днях посылочку вот с такими моторами.
А на моторах написано: «1.8° 2.5А». Вот эти 2.5А меня озадачили, ток как при подключении к выше описанным драйверам, микросхемам поплохело через минуту. Ну думал, думал и нашел в своих запасах MOSFEты. Я ими в свою очередь пытался управлять мотором на фрезерном станке, но так все и заглохло. С передачей 1:2 обороты регулировать просто не понадобилось. Вот я и подумал, а не собрать ли свой силовой драйвер для шаговиков на этих транзисторах. Смотрим на картинку ниже. (это из даташита на L298).
Давайте разберемся по подробнее. Ножка +Vs получает напряжения для мотора. +Vss питание схемы. In1…In4 задают управляющие сигналы. EnA, EnB задают ШИМ. SENSE A, SENSE B нужны для определения протекающего тока. Для этих целей стоят два резистора Rsa и Rsb. OUT1…OUT4 соответственно идут к выводам мотора. Посмотрев на схему я решил сделать такую же но на рассыпухе. Биполярные транзисторы заменил на MOSFET IRFZ44, они самые распространенные. Логику для управления сначала хотел сделать на биполярникак, но нашел им замену в виде готового драйвера от той же фирмы IR2104. Драйвер конечно хороший, но… Жутко боится статики. Сжег 7 микросхем. Понял когда уже со злости перепаивал седьмую микросхему, на нервном срыве выключил музыку и при полной тишине касаясь жалом до ножки микросхемы, слышу «чпок». Следующие ноги сделали тоже самое. От сюда вывод, паять только феном. Второй касяк, драйверы боятся быть грязными. Убил уйму времени пока не помыл в УЗ ванне. Если оставить флюс на плате, то осцил такое выдает )) В связи с копированием данной схемы, решил логику работы переложить на специализированную микросхему L297. Они в принципе созданы друг для друга. Смотрим схему.
На схеме справа внизу видно разъем для подключения вентилятора охлаждения, но при испытани я заметил что транзисторы не греются вообще, а стабилизатор на 12в греется. Также добавил режим тока удержания. Это нужно для того чтобы в момент простоя мотора ток был минимален. Мотор не греется, экономия электроэнергии )) Если требуется держать вал мотора намертво, можно резистор R16 выкинуть из схемы, а выводы замкнуть между собой. После сборки регулировка не требуется. Точнее требуется. Если стоят два резистора то регулировать нужно так: Сначала нужно вычислить опорное напряжение. Для этого нужно по закону Ома умножить сопротивление резистора R9, это тот 5-ти ваттный, на требуемый ток. Например мне нужно 2,5А. 0.22Ом * 2,5А = 0,55В. То есть требуется подать на ногу 15 Vref микросхемы L297 0.55В. Чтобы это сделать нужно на разъеме J10 на вывод «Ток удержания» подать 5В, а на вывод «Диагностика Vref» повесить тестер. Вращая регулировочный винт резистора R17 добиться 0.55В. Далее не отключая тестер, снять 5В и прижать к земле. Напряжение должно упасть. Далее вычислить ток удержания. Я решил дать 0,75А. Вал сам не провернется но и если что, то рукой можно провернуть. Для моих целей то что надо. 0,22Ом * 0,75А = 0,165В. Значит вращаем резистор R16 до получения требуемого напряжения. Потом снова подаем 5В и корректируем до 0,55В. Подать 0В и проверить ток удержания, если убежал, подправить. Ну короче переключать и регулировать пока требуемые напряжения не установятся. Подаем 5В на вывод «Ток удержания», получаем 0,55В. Подаем 0В, получаем 0,165В. Есть одно но… После остановки мотора, ток удержания сразу уменьшать не надо. Мотор остановили, подождали пол секунды, а потом смело уменьшаем. Да, вот еще один плюс к уменьшению тока, мотор при удержании вала с рабочим током сильно пищит. Если ток уменьшить писк пропадает. Внизу будет видео работы всего этого безобразия и там это хорошо слышно. Резюме: Для того чтобы мотор сделал шаг, нужно на вывод «Ток удержания» подать 1. На вывод «Направление» подать 1 или 0, в зависимости от направления и подать импульс на вывод «Шаги». Один импульс, один шаг. Затем подождать пол секунды и подать 0 на вывод «Ток удержания». Вот весь алгоритм для управления мотором. Ой, чуть не забыл! Разъём J8 нужен для выбора режима Шаг/Полушаг. Если джампера нет, то полношаговый режим, если установлен то полушаговый. Также можно управлять режимом с МК. Если подать 0 на вывод №2 будет шаг, если 1 то полушаг. Страссированную плату не дам. Я не жадный, я просто ее делал для тестов и отработки схемы. В ней много чего есть, что не нужно для работы мотора. Что-то вроде тестовых подсхем )) Не, поделюсь )) Я выкинул из нее все лишние и перетрассировал. Как она будет выглядеть можно посмотреть на 3D модель ниже.
Это реальная плата, но с добавками.
Вот архив с проектом в DipTrace. Да, я предал P-CAD. Меня купили за 3D-модели )) Архив с проектом.
На плате нет ни одной перемычки. Все детали у которых можно подлезть с паяльником к ножке, обязательно пропаять. Разъёмы J5, J8, J9, J10 паять таким образом: Поднять корпус по выводам до самого верха, затем вставить в отверстия таким образом чтобы выводы с другой стороны вылезли на 1 мм и пропаять их. Затем перевернуть плату и пропаять сверху. Затем опустить корпус вниз. Корпус сядет прямо на плату. Это из-за того что в корпусе снизу есть канавка, припой не помешает. Ну вроде все. Будут вопросы, пишите.
Вот конечный результат. Три платы на три оси. Платы страссированны в более компактном варианте.
Архив с новым проектом.
JW Player goes here