


Двигатель постоянного тока: схемы включения
Электродвигатели, работающие на постоянном токе, используются не так часто, как двигатели переменного тока. Ниже приведем их достоинства и недостатки.
| Достоинства | Недостатки |
| частота вращения легко регулируется | высокая стоимость |
| мягкий пуск и плавный разгон | сложность конструкции |
| получение частоты вращения выше 3000 об/мин | сложность в эксплуатации |
В быту двигатели постоянного тока нашли применение в детских игрушках, так как источниками для их питания служат батарейки. Используются они на транспорте: в метрополитене, трамваях и троллейбусах, автомобилях. На промышленных предприятиях электродвигатели постоянного тока применяются в приводах агрегатов, для бесперебойного электроснабжения которых используются аккумуляторные батареи.
Конструкция и обслуживание двигателя постоянного тока
Основной обмоткой двигателя постоянного тока является якорь, подключающийся к источнику питания через щеточный аппарат. Якорь вращается в магнитном поле, создаваемом полюсами статора (обмотками возбуждения). Торцевые части статора закрыты щитами с подшипниками, в которых вращается вал якоря двигателя. С одной стороны на этом же валу установлен вентилятор охлаждения, прогоняющий поток воздуха через внутренние полости двигателя при его работе.
Схема двигателя постоянного токаЩеточный аппарат – уязвимый элемент в конструкции двигателя. Щетки притираются к коллектору, чтобы как можно точнее повторять его форму, прижимаются к нему с постоянным усилием. В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором. Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Со временем щетки изнашиваются и заменяются. Коллектор в местах контакта со щетками тоже истирается. Периодически якорь демонтируют и протачивают коллектор на токарном станке. После протачивания изоляция между ламелями коллектора срезается на некоторую глубину, так как она прочнее материала коллектора и при дальнейшей выработке будет разрушать щетки.
Схемы включения двигателя постоянного тока
Наличие обмоток возбуждения – отличительная особенность машин постоянного тока. От способов их подключения к сети зависят электрические и механические свойства электродвигателя.
Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбужденияОстальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбужденияПоследовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбужденияСмешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
Схема смешанного возбужденияДля изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений.
Оцените качество статьи:
Электродвигатель постоянного тока: схема подключения, принцип работы
Автор Светозар Тюменский На чтение 3 мин. Просмотров 2.6k. Опубликовано
Электродвигатели постоянного тока действуют на основе использования принципа магнитной индукции и применяются на производстве в тех случаях, когда необходимо обеспечить регулировку скорости вращения в различных диапазонах, но с высокой точностью. На сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока. В зависимости от необходимой мощности их работа может обеспечиваться как за счет постоянных магнитов, так и за счет электромагнитов.
Схема подключения электродвигателя постоянного тока

Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Устройство электродвигателя постоянного тока
Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода.

Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции. В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.

Принцип действия электродвигателя постоянного тока
В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной.
Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.

Электродвигатель постоянного тока 12 Вольт
На сегодняшний день этот тип электродвигателей является одним из самых популярных. Это обусловлено тем, что именно двигатели с таким напряжением устанавливаются на большинство автомобилей и не только на них, но и на множество другой техники, которая применяется для решения самых разнообразных задач.
Электродвигатель постоянного тока П -11 С1 У4 работа
Двигатель постоянного тока (часть 1)
Электродвигатели постоянного тока
Как подключить двигатель постоянного тока? — Электропривод
8) Начнём по порядку: 1Я1 и 1Я2-это обмотка якоря тахогенератора, ну хрен с ним, он тебе не нужен; Ш1, Ш2, Ш3 и Ш4— это шунтовые обмотки (они намотаны толстым проводом и включаются последовательно с якорем, одна слева, другая справа), Д1 и Д2— это обмотки добавочных полюсов, они так же включаются последовательно с якорем, эти обмотки необходимы для улучшения коммутации на якоре,
Ну короче, Склифосовский, что мы имеем: двигатель у тебя постоянного тока с последовательным возбуждением, так как присутствует шунтовая обмотка, кототорая и создаёт основной магнитный поток. Такие двигателя используются в электротранспорте, трамваях, троллейбусах и т.д.
Я конечно не ксенофоб, но ГЛАВНЫЙ РАВВИН не прав в том что это машина со смешанным возбуждением, если бы она со смешанным была у неё ещё бы сириесная обмотка была (клеммы С1 и С2

Только без нагрузки его долго не гоняй, так как это машина с поледовательным возбуждением, она пойдёт в разнос, т.е. обороты будут расти и расти, попробуй кратковременно. Да и буковки эти все запомни 😉 . А ГЛАВНЫЙ РАВВИН помоему вообще далёк от электропривода и не понимает о чём реч идёт, херь какую то порит, какой регулятор, какое магнитное управление? :8P:
Тема 4.3. Двигатели постоянного тока
4.3.1. Основные уравнения
Двигатели постоянного тока могут иметь следующие способы возбуждения: независимое, параллельное, последовательное, смешанное (рис. 4.5).
В отличие от генераторного режима работы, когда с обмотки якоря снимается выходное напряжение, в режиме двигателя к обмотке якоря подводится напряжение питания. Взаимодействие тока проводников якоря с магнитным полем обмотки возбуждения создает силу Ампера, выталкивающую проводники якоря из магнитного поля, т.е. возникает электромагнитный момент, под действием которого якорь приходит во вращение. Таким образом, электрический двигатель преобразует потребляемую электрическую энергию в механическую энергию вращения. Подробнее принцип работы двигателя рассмотрен в п.
Электромагнитный момент двигателя (4.12)
 .
.
При работе с установившейся частотой вращения электромагнитный момент уравновешивается статическим моментом на валу Мс
 ,
,
где М0 – момент холостого хода, обусловленный собственными потерями двигателя; М2 – полезный момент (момент нагрузки на валу).
При работе в динамическом режиме с изменением частоты вращения на вал двигателя действует статический Мс и динамический Мд моменты

Динамический момент пропорционален моменту инерции J вращающихся частей двигателя и приводного механизма
 , (4.23)
, (4.23)
где
угловая скорость двигателя 
 ,
, 
позволяют получить уравнение скоростной характеристики
 . (4.24)
. (4.24)
Подставив
в (4.24) выражение тока из формулы момента
(4.12), получим
формулу механической характеристики  .
(4.25)
При увеличении момента нагрузки
на валу частота вращения двигателя
уменьшается, что обеспечивает устойчивость
работы двигателя. При устойчивой работе
двигатель способен вернуться к исходному
режиму при малых возмущениях его работы,
когда эти возмущения прекратятся
(например, кратковременные изменения
напряжения сети или момента нагрузки).
Подробно вопрос устойчивости работы
двигателя рассмотрен в [1], п.4.5.2.
.
(4.25)
При увеличении момента нагрузки
на валу частота вращения двигателя
уменьшается, что обеспечивает устойчивость
работы двигателя. При устойчивой работе
двигатель способен вернуться к исходному
режиму при малых возмущениях его работы,
когда эти возмущения прекратятся
(например, кратковременные изменения
напряжения сети или момента нагрузки).
Подробно вопрос устойчивости работы
двигателя рассмотрен в [1], п.4.5.2.
4.3.2. Пуск двигателя
В момент включения двигатель неподвижен (n=0), следовательно противо-ЭДС обмотки якоря Е= 0. Согласно (4.14) величина начального пускового тока
 .
(4.26)
.
(4.26)
Обычно сопротивление якорной цепи R незначительно, поэтому начальный пусковой ток может составить In (10...50)IН. Такое превышение тока недопустимо, так как оно может вызвать «круговой огонь» на коллекторе. Для ограничения пускового тока обычно в цепь якоря включается пусковой реостат. В начальный момент пуска реостат должен быть полностью введен. По мере разгона двигателя реостат выводят, переключая его со ступени на ступень. По окончании пуска его полностью выводят.
Сопротивление пускового реостата RПР выбирают из условия:
 .
(4.27) 4.3.3. Способы регулирования частоты вращения
.
(4.27) 4.3.3. Способы регулирования частоты вращения
Частоту вращения согласно (4.25) можно регулировать следующими способами :
а) напряжением U, подводимым к электродвигателю;
б) добавочным сопротивлением Rд, включенным в цепь якоря, тогда
 ;
(4.28)
;
(4.28)
в) магнитным потоком Ф с помощью тока возбуждения, вводя реостат в цепь возбуждения. Регулирование частоты вращения изменением напряжения питания U осуществляется уменьшением напряжения от номинального значения, что приводит к уменьшению частоты вращения (регулировка «вниз»). Этот способ регулирования позволяет сохранить высокое значение КПД, однако при этом требуется специальный регулируемый источник питания (например, система генератор – двигатель).
Регулирование частоты вращения с помощью добавочного сопротивления Rд в цепи якоря также является регулировкой «вниз». Механические характеристики при наличии Rд называются искусственными. Из-за больших потерь мощности в регулировочном реостате и значительном уменьшении КПД этот способ находит ограниченное применение. Отметим, что при достаточно большой величине сопротивления Rд и изменении направления вращения двигателя под действием внешней силы (например, спуск груза) механическая характеристика пересекает ось абсцисс, а двигатель переходит в режим электромагнитного тормоза, потребляя электрическую энергию из сети и механическую энергию с вала, развивая тормозной момент.
Регулирование частоты вращения уменьшением магнитного потока осуществляется посредством реостата в цепи возбуждения и дает увеличение частоты вращения (регулировка вверх).
Механические характеристики для этих способов регулирования рассмотрены ниже. Широкое применение находит импульсное регулирование частоты вращения [1].
Реверсирование и торможение
Изменение направления вращения якоря (реверсирование) согласно (4.24) может быть получено переключением полярности обмотки якоря, т.е. изменением полярности напряжения и тока якоря или изменением направления магнитного потока (переключение полярности обмотки возбуждения). При одновременном переключении обеих обмоток направление вращения двигателя остается неизменным. Изменение полярности напряжения, приложенного к якорю, применяют при необходимости быстрого торможения двигателя (торможение противовключением). Для ограничения толчков тока и момента в якорную цепь вводят добавочное сопротивление. Если после остановки двигатель не отключить, то он начнет вращаться в другую сторону (реверс).
Рекуперативное торможение двигателя осуществляют путем отдачи электрической энергии в сеть. Для этого необходимо, чтобы ЭДС машины превосходила напряжение сети, этого можно достичь увеличением тока возбуждения или частоты вращения. Ток якоря и момент изменяют свое направление, машина переходит в режим генератора. Двигатель последовательного возбуждения нельзя непосредственно перевести в генераторный режим. Процесс рекуперации более просто осуществить для двигателя смешанного возбуждения.
Для двигателя независимого возбуждения применяют динамическое торможение, когда якорь отключается от сети и замыкается на нагрузочное сопротивление. Машина переходит в генераторный режим.
4.3.6. Механические характеристики
Механические характеристики – это зависимость п = f (М2) при U=const, Iв= const, Rд = const. Механическая характеристика, соответствующая условиям рабочей характеристики (U = UH , iВ = iвн, Rд = 0), называется естественной. Вид механической характеристики зависит от способа возбуждения двигателя.
Двигатель параллельного возбуждения Серийные двигатели параллельного возбуждения снабжаются слабой обмоткой последовательного возбуждения, называемой стабилизирующей (рис. 4.5, д). Число витков этой обмотки выбирается так, чтобы компенсировать размагничивающее действие поперечной реакции якоря. В таком двигателе при изменении нагрузки магнитный поток остается практически постоянным.
Механические характеристики двигателя параллельного возбуждения показаны на рис. 4.10. Двигатель независимого возбуждения имеет такие же характеристики.
Естественная
характеристика обозначена цифрой 1.
Частота вращения (4.24,
4.25)
двигателя
c
ростом нагрузки уменьшается. Однако
это изменение незначительно, так как
сопротивление R
якорной цепи мало. Отношение  определяет номинальное изменение
частоты вращения двигателя при изменении
его нагрузки от номинальной до нуля.
Для двигателя параллельного возбуждения
нормального исполнения n не превышает 10 %. Такая механическая
характеристика называется жесткой.
определяет номинальное изменение
частоты вращения двигателя при изменении
его нагрузки от номинальной до нуля.
Для двигателя параллельного возбуждения
нормального исполнения n не превышает 10 %. Такая механическая
характеристика называется жесткой.
Регулирование частоты вращения двигателя возможно всеми тремя способами описанными выше.
Для двигателей средней и большой мощности широкое применение находит система «генератор – двигатель» (Г–Д), позволяющая изменять напряжение питания двигателя путем подключения к генератору постоянного тока (рис. 4.11). При уменьшении напряжения механическая характеристика 2 (рис. 4.10) идет ниже естественной характеристики 1.

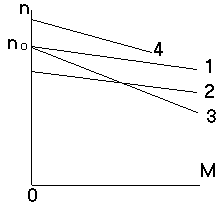
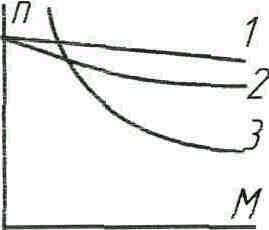
При включении добавочного сопротивления Rд в цепь якоря характеристика 3 согласно (4.25) увеличивает свой наклон. При уменьшении тока возбуждения с помощью реостата в цепи возбуждения частота вращения двигателя возрастает (характеристика 4). Зависимость частоты вращения от тока возбуждения n=f(IB) имеет вид гиперболы. При малых значениях тока возбуждения, а тем более при обрыве цепи возбуждения частота вращения резко увеличивается, что может привести к «разносу» двигателя и механическому разрушению. Двигатели параллельного и независимого возбуждения благодаря линейности и жесткости механических характеристик, а также возможности плавного регулирования частоты вращения в широких пределах получили распространение как в силовом электроприводе (для привода механизмов и станков), так и в схемах автоматики.
Двигатель последовательного возбуждения В этих двигателях обмотка возбуждения включается последовательно с обмоткой якоря (рис. 4.5, г) и ток возбуждения равен току якоря Iв = Iя, что придает двигателям особые свойства. При небольших нагрузках, когда магнитная цепь машины ненасыщена (Ф IЯ), электромагнитный момент пропорционален квадрату тока якоря:
 .
(4.29) С увеличением нагрузки магнитная
цепь машины насыщается и пропорциональность
между потоком Ф и током IЯ нарушается. Зависимость электромагнитного
момента М от тока якоря IЯ в начальной
части (когда нет насыщения) имеет форму
параболы, а в области больших нагрузок
переходит в прямую (рис. 4.12).
.
(4.29) С увеличением нагрузки магнитная
цепь машины насыщается и пропорциональность
между потоком Ф и током IЯ нарушается. Зависимость электромагнитного
момента М от тока якоря IЯ в начальной
части (когда нет насыщения) имеет форму
параболы, а в области больших нагрузок
переходит в прямую (рис. 4.12).
Зависимость
частоты вращения n
от тока якоря Iя
(скоростная характеристика) определяется
выражением  ,
где
,
где

В области небольших нагрузок, когда магнитная система машины ненасыщена и Ф Iя эта харак- теристика имеет вид гиперболы; с увеличением нагрузки растет насыщение и характеристика становится более пологой. Следует обратить внимание на недопустимость работы двигателя последовательного возбуждения в режиме холостого хода или с нагрузкой менее 25 % от номинальной, так как при этом магнитный поток слишком мал и
Рис.4.12 частота вращения достигает чрезмерно больших
значений, что ведет к разносу двигателя.
Механическая характеристика двигателя последовательного возбуждения n=f(M) при U=const имеет вид гиперболы (рис.4.15, кривая 3) аналогично скоростной характеристики n = f(IЯ) (рис.4.12).
Регулирование частоты вращения двигателя последовательного возбуждения
возможно изменением напряжения питания U, включением добавочного сопротивления Rдоб в цепь якоря и изменением величины магнитного потока Ф .
Первые два способа регулирования производятся также, как в двигателе параллельного возбуждения.
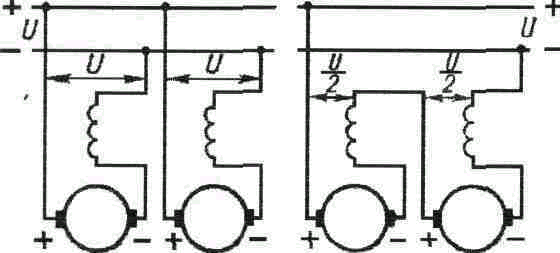
В транспортных установках, где на каждой ведущей оси устанавливается отдельный двигатель, регулирование частоты вращения изменением напряжения питания осуществляется путем переключения двигателей с параллельного включения в сеть на последовательное (рис.4.13).
RШВ
Рис. 4.13 Рис.4.14При введении добавочного сопротивления Rдоб в цепь якоря механическая характеристика смещается в область меньших частот вращения.
При регулировании частоты вращения изменением магнитного потока Ф возможны два случая (рис. 4.14). В первом случае реостат Rшв включается параллельно обмотке возбуждения, что вызывает уменьшение тока возбуждения IB=I—IШВ и увеличение частоты вращения. Во втором случае реостат Rша включается параллельно обмотке якоря, что сопровождается увеличением тока возбуждения IB=IЯ+ Iша и снижением частоты вращения. Однако значительные потери в реостате Rша делают этот способ неэкономичным, что ограничивает его применение.
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент, пропорциональный квадрату тока нагрузки, обеспечивает этим двигателям хорошие пусковые свойства ? пусковой момент при сравнительно малом токе. Благодаря хорошим пусковым свойствам и мягкой механической характеристике с глубоким изменением скорости, эти двигатели широко применяются на транспорте.
для привода компрессоров, строгальных станков,
печатных машин, прокатных станов, подъемников Рис.4.15 и т.д.
Вопросы для самопроверки
1. Как классифицируются машины постоянного тока по способу возбуждения? Изобразите электрические схемы.
2. Объясните принцип работы в режиме генератора и двигателя.
3. Напишите формулу ЭДС и формулу электромагнитного момента.
4. Каким мнемоническим правилом определяются направление ЭДС в обмотке якоря и направление электромагнитных сил и момента?
5. Изобразите внешнюю характеристику для генераторов с независимым и параллельным возбуждением.
6. Напишите уравнения напряжений для генератора и двигателя.
7. Напишите уравнения токов для машины с параллельным возбуждением, работающей в режиме генератора и в режиме двигателя.
8.
Изобразите зависимости  и
и для
двигателя с параллельным и последовательным
возбуждением.
для
двигателя с параллельным и последовательным
возбуждением.
9. Напишите формулу механической характеристики двигателя. Начертите механические характеристики двигателей с параллельным и последовательным возбуждением.
10. Перечислите способы регулирования частоты вращения двигателя постоянного тока и укажите преимущества и недостатки этих способов. 11. Начертите три механические характеристики двигателя постоянного тока с параллельным возбуждением – естественную и две искусственные
при включении добавочного сопротивления: а) в цепь якоря; б) в цепь возбуждения.
Заключение
Электрические машины составляют основу электроэнергетики как в
процессе производства, так и в процессе потребления электроэнергии во всех отраслях промышленности и транспорта.
Совершенствование электрических машин с целью увеличения технико-энергетических показателей ведётся как в области улучшения технологии изготовления, так и в области повышения качества магнитных и электроизоляционных материалов.