


Силовая часть схемы управления | НПП Ковинт
Силовая часть схемы управления работой винтового компрессора содержит устройства, через которые подается электропитание на главный двигатель и двигатель вентилятора компрессора. В качестве этих устройств наиболее часто применяются электромагнитные контакторы.
Электромагнитный контактор
Схематично конструкция контактора показана на рисунке ниже:
Конструкция электромагнитного контактора
1 — электромагнитная катушка;
2 – неподвижная часть сердечника;
3 – подвижная часть сердечника;
4 – неподвижные контакты;
5 – подвижные контакты;
6 – изолирующий держатель подвижных контактов.
При подаче напряжения на катушку 1 подвижная часть сердечника 3 под действием силы притяжения к намагнитившейся неподвижной части сердечника 2 перемещается вниз. При этом неподвижные контакты 4 попарно замыкаются подвижными контактами 5, которые связаны с подвижной частью сердечника 3 держателем 6.
После отключения напряжения от катушки 1 подвижная часть сердечника 3 возвращается в исходное положение под действием пружины (на рисунке не показана) и пары неподвижных контактов 4 размыкаются.
Как видите, устройство контактора довольно просто. Но благодаря ему решается очень важная задача – коммутация силовых цепей питания электродвигателя (а токи в них могут быть довольно большими) при помощи слаботочной цепи питания электромагнитной катушки.
На принципиальных электрических схемах электромагнитный контактор, как привило, изображается следующим образом (здесь показан контактор для трехфазной цепи):
Изображение контактора на принципиальной электрической схеме
На схеме буквами А1, А2 обозначены выводы электромагнитной катушки, буквами L1, L2, L3 – входные (от источника питания), а буквами Т1, Т2, Т3 – выходные (к обмоткам электродвигателя) силовые клеммы.
Мощность двигателя вентилятора в винтовых компрессорах, как правило, невелика. Поэтому для его включения используется один контактор.
Совсем другое дело – запуск главного двигателя компрессора. Пусковой ток при этом может в 7-8 раз превышать номинальный ток двигателя.
Сразу оговоримся, что описание принципа работы асинхронного электродвигателя выходит за рамки данной статьи. В случае необходимости Вы всегда можете почерпнуть дополнительную информацию из справочников или на просторах Всемирной паутины. Кроме того, мы всегда рады предоставить необходимые сведения после заполнения Вами формы в конце страницы.
Итак, существует несколько способов борьбы с высокими пусковыми токами асинхронного двигателя.
Наиболее распространенным является пуск по так называемой схеме «звезда – треугольник».
Откуда же возник этот термин?
Дело в том, что обмотки трехфазного асинхронного двигателя могут быть соединены «звездой» или «треугольником»:
Соединение обмоток двигателя «звездой» и «треугольником»
На типовой идентификационной табличке (шильдике) электродвигателя можно увидеть вот такие данные:
Типовая табличка электродвигателя
В данном примере рабочее напряжение двигателя при соединении его обмоток «звездой» (
Поскольку в России стандартным считается трехфазное напряжение 400В 50Гц, рабочим для данного двигателя является соединение его обмоток «треугольником».
А что же произойдет, если, сохранив напряжение питания 400В, соединить обмотки двигателя «звездой»?
В случае, когда на валу двигателя постоянно присутствует номинальная нагрузка, такое переключение приведет к росту потребляемого тока. А вот если на валу двигателя в момент пуска нагрузка отсутствует или незначительна, потребляемый ток снизится в 3 раза
Из других наших статей, посвященных винтовым компрессорам, Вы уже знаете, что они могут работать в двух режимах – нагрузки и холостого хода. Запуск компрессора всегда происходит на холостом ходу, т.е. нагрузка на вал двигателя очень мала. Поэтому мы смело можем на этапе разгона соединить обмотки двигателя «звездой» для снижения пускового тока.
И лишь через некоторое время (интервал зависит от мощности двигателя, но обычно не превышает 10 секунд) произвести быстрое переключение обмоток на соединение «треугольником».
Как же это реализуется на практике?
Для коммутации обмоток двигателя применяют схему, состоящую из трех контакторов:
Силовая часть схемы «звезда – треугольник»
При запуске сначала включаются контакторы КМ1 и КМ3, соединяя обмотки двигателя в «звезду». Через заданный промежуток времени, отведенный на разгон, контактор КМ3 отключается, а контактор КМ2 включается. Обмотки двигателя соединяются в «треугольник». Переключение контакторов КМ2 и КМ3 происходит очень быстро (доли секунды).
В тоже время ситуация, когда оба контактора включены (это привело бы к короткому замыканию) невозможна благодаря наличию между ними механической блокировки (на схеме показана небольшим треугольником).
Реально собранная схема «звезда – треугольник» выглядит примерно так:
Схема «звезда – треугольник» в сборе
Сигналы на включение контакторы получают от цепей контроля управления и индикации, которые мы рассмотрим ниже.
Для снижения пусковых токов в силовой части винтовых компрессоров применяют также так называемые устройства плавного пуска (УПП). Хотя УПП применяются не так часто, как схемы «звезда – треугольник», скажем о них несколько слов.
Устройства плавного пуска
УПП представляет собой довольно сложное электронное устройство, в котором в качестве силовых элементов используются полупроводниковые симметричные тиристоры (симисторы).
Упрощенная схема силовой части УПП
Симисторы способны открываться под действием импульсов, подаваемых на их управляющие входы. Как известно, напряжение переменного тока имеет синусоидальную форму. Если открывающие импульсы подавать на управляющие входы симисторов с задержкой, то результирующее напряжение на обмотках двигателя будет тем меньше, чем позже открываются симисторы.
Принцип работы УПП
Таким образом, во время пуска напряжение и ток в обмотках двигателя плавно нарастают за заданное время (время пуска). Это позволяет избежать возникновения бросков тока.
Изменение напряжения на обмотках при различных способах пуска:
Изменение напряжения на обмотках при различных способах пуска
Изменение тока в обмотках при различных способах пуска:
Изменение тока в обмотках при различных способах пуска
По истечении времени разгона, когда симисторы закончили выполнять роль регулирующих элементов, они шунтируются встроенным в УПП контактором (см. рисунок «Упрощенная схема силовой части УПП» выше). Это значительно повышает надежность и долговечность устройства.
Следует отметить, что разные модели УПП могут значительно отличаться по своим функциональным возможностям. Дешевые устройства, как правило, позволяют задавать только время разгона и ограничение тока. Они даже могут не иметь шунтирующих контактов. Более дорогие модели УПП имеют широкий набор настроек и встроенную всестороннюю защиту как самого устройства, так и электродвигателя.
Пример замены схемы «звезда – треугольник» устройством плавного пуска
В современных винтовых компрессорах также широко применяются частотные преобразователи (ЧП).
Назначение ЧП гораздо более широкое, чем у УПП. Они не только позволяют осуществить плавный разгон двигателя при запуске компрессора, но и осуществляют регулирование скорости вращения роторов винтового блока, изменяя производительность компрессора в широких пределах. О пользе такого регулирования более подробно рассказано в статье «Цепи контроля, управления и индикации».
ЧП является более сложным, по сравнению с УПП, устройством. Он позволяет изменять не только величину, но и частоту напряжения, подаваемого на обмотки двигателя компрессора.
В качестве силовых элементов на выходе ЧМ применяются современные мощные IGBT-транзисторы. Не вдаваясь в подробности, скажем только, что эти полупроводниковые приборы имеют ряд преимуществ перед симисторами, устанавливаемыми в УПП.
Структурная схема частотного преобразователя
В ЧП входное напряжение сначала преобразуется в постоянное при помощи выпрямителя и фильтра. Затем шесть транзисторных ключей по специальному алгоритму, задаваемому схемой управления, формируют из постоянного напряжения двуполярные прямоугольные импульсы переменной ширины. При этом ток в обмотках двигателя (они сами выполняют роль фильтров импульсного напряжения) близок к синусоидальному.
Форма напряжения на обмотках двигателя и тока в них
На схему управления транзисторными ключами подается входной сигнал, в зависимости от которого изменяется частота следования прямоугольных импульсов и их ширина. В винтовых компрессорах таким сигналом является, как правило, давление в пневмосети. Также ЧП может управляться контроллером компрессора.
Силовой щит винтового компрессора с установленным в нем ЧП
И в заключение скажем несколько слов об устройствах защиты, входящих в состав силовой части схемы управления работой винтового компрессора.
В процессе работы главного двигателя его обмотки неизбежно подвергаются нагреву. Изоляция провода, которым выполнены обмотки, способна выдерживать нагрев только до определенного уровня. При превышении этого порога изоляция начинает разрушаться и, как следствие, происходит замыкание.
Перегрев двигателя может происходить по ряду причин:
- повышенная нагрузка на валу вследствие, например, неисправности в винтовом блоке;
- плохие условия вентиляции внутри компрессора;
- высокая температура окружающей среды и т.д.
Для того, чтобы не допустить разрушения изоляции и вовремя остановить двигатель при перегреве, в его обмотки вмонтированы чувствительные элементы – термисторы.
Внешний вид термисторов
Это полупроводниковые приборы, сопротивление которых зависит от температуры. Но, в отличие от обычных проволочных терморезисторов, зависимость эта носит резко нелинейный характер.
Температурные характеристики термисторов
Термисторы устанавливаются производителем двигателя и конкретная температура резкого роста сопротивления зависит от класса изоляции обмоток.
В трехфазных двигателях термисторы устанавливаются в каждую обмотку и электрически соединяются последовательно. Поэтому контрольное устройство реагирует на изменение общего сопротивления трех термисторов.
Если в схеме управления работой компрессора используется специализированный контроллер, имеющий отдельный вход для подключения термистора двигателя, то никакие дополнительные устройства не требуются. Контроллер распознает резкий рост сопротивления термистора или обрыв цепи, останавливает двигатель и отображает на панели индикации сообщение об аварийной остановке и ее причине.
Если же контроллера нет или он не имеет входа для подключения термистора, необходимо использовать специальное термисторное реле. Его внутренние контакты переключаются при резком изменении сопротивления термистора и этот сигнал можно использовать для подключения к релейной схеме управления работой компрессора или к обычному цифровому входу контроллера.
Типовая схема термисторного реле
Также для защиты главного двигателя компрессора служит тепловое реле, подключаемое после контактора КМ1 в схеме «звезда – треугольник».
Подключение теплового реле OL1
Само по себе тепловое реле не производит разрыв цепи главного двигателя. Оно реагирует на длительное превышение номинального тока и размыкает контакты 95, 96. Этот сигнал используется для подключения к релейной схеме или контроллеру компрессора.
Следует обратить внимание на то, что при такой схеме подключения (а она наиболее распространена) через тепловое реле протекает не весь потребляемый двигателем ток, а только его часть (1/Ö3 или 58%). Это надо помнить, производя настройку теплового реле (все они имеют регулятор тока срабатывания). Номинальный ток двигателя можно определить по его идентификационной табличке.
В отличие от теплового реле, автоматический выключатель защиты двигателя вентилятора при срабатывании разрывает цепь его питания.
Подключение автомата защиты двигателя вентилятора
Этот автоматический выключатель также может иметь дополнительную группу контактов, которую можно использовать для передачи сигнала о срабатывании защиты на релейную схему или контроллер компрессора.
Ниже на фото приведен фрагмент силового щита винтового компрессора с установленными контактором и автоматическим выключателем двигателя вентилятора.
Фрагмент силового щита с цепями питания и защиты двигателя вентилятора
Может возникнуть закономерный вопрос: «Почему главный двигатель защищается тепловым реле, а двигатель вентилятора – автоматическим выключателем?»
Ответ достаточно прост.
Дело в том, что двигатели вентиляторов винтовых компрессоров имеют малую мощность и защитные автоматы для них невелики. Мощность же главного двигателя исчисляется десятками, а то и сотнями киловатт. И автоматический выключатель для него (хотя такие и существуют) был бы чрезмерно велик и тяжел. Так что все дело в экономии места.
На этом все.
Все возникшие вопросы вы можете задать в форме ниже. Мы ответим в течение 1-2 рабочих дней.
С уважением,
Константин Широких & Сергей Борисюк
Вернуться в раздел Полезная информация
Еще по теме:
Винтовые компрессоры. Общая информация
Принцип работы винтового компрессора
Конструкция/устройство винтового компрессора
Конструкция винтового газового компрессора. Видео
Конструкция винтового блока компрессора
Конструкция всасывающего клапана (регулятора всасывания) винтового компрессора
Конструкция термостата. Назначение термостата в винтовом компрессоре
Конструкция клапана минимального давления (КМД). Назначение КМД в винтовом компрессоре
Конструкция масляного резервуара. Назначение и принцип действия
Конструкция сепаратора тонкой очистки. Назначение и функции в винтовом компрессоре
Схема управления работой винтового компрессора. Общая информация
Разработка принципиальной электрической схемы силовой части электропривода. Силовая часть электрической схемы
Силовая часть схемы управления | НПП Ковинт
Силовая часть схемы управления работой винтового компрессора содержит устройства, через которые подается электропитание на главный двигатель и двигатель вентилятора компрессора. В качестве этих устройств наиболее часто применяются электромагнитные контакторы.
Электромагнитный контактор
Схематично конструкция контактора показана на рисунке ниже:
Конструкция электромагнитного контактора
1 — электромагнитная катушка;
2 – неподвижная часть сердечника;
3 – подвижная часть сердечника;
4 – неподвижные контакты;
5 – подвижные контакты;
6 – изолирующий держатель подвижных контактов.
При подаче напряжения на катушку 1 подвижная часть сердечника 3 под действием силы притяжения к намагнитившейся неподвижной части сердечника 2 перемещается вниз. При этом неподвижные контакты 4 попарно замыкаются подвижными контактами 5, которые связаны с подвижной частью сердечника 3 держателем 6.
После отключения напряжения от катушки 1 подвижная часть сердечника 3 возвращается в исходное положение под действием пружины (на рисунке не показана) и пары неподвижных контактов 4 размыкаются.
Как видите, устройство контактора довольно просто. Но благодаря ему решается очень важная задача – коммутация силовых цепей питания электродвигателя (а токи в них могут быть довольно большими) при помощи слаботочной цепи питания электромагнитной катушки.
На принципиальных электрических схемах электромагнитный контактор, как привило, изображается следующим образом (здесь показан контактор для трехфазной цепи):
Изображение контактора на принципиальной электрической схеме
На схеме буквами А1, А2 обозначены выводы электромагнитной катушки, буквами L1, L2, L3 – входные (от источника питания), а буквами Т1, Т2, Т3 – выходные (к обмоткам электродвигателя) силовые клеммы.
Мощность двигателя вентилятора в винтовых компрессорах, как правило, невелика. Поэтому для его включения используется один контактор.
Совсем другое дело – запуск главного двигателя компрессора. Пусковой ток при этом может в 7-8 раз превышать номинальный ток двигателя.
Сразу оговоримся, что описание принципа работы асинхронного электродвигателя выходит за рамки данной статьи. В случае необходимости Вы всегда можете почерпнуть дополнительную информацию из справочников или на просторах Всемирной паутины. Кроме того, мы всегда рады предоставить необходимые сведения после заполнения Вами формы в конце страницы.
Итак, существует несколько способов борьбы с высокими пусковыми токами асинхронного двигателя.
Наиболее распространенным является пуск по так называемой схеме «звезда – треугольник».
Откуда же возник этот термин?
Дело в том, что обмотки трехфазного асинхронного двигателя могут быть соединены «звездой» или «треугольником»:
Соединение обмоток двигателя «звездой» и «треугольником»
На типовой идентификационной табличке (шильдике) электродвигателя можно увидеть вот такие данные:
Типовая табличка электродвигателя
В данном примере рабочее напряжение двигателя при соединении его обмоток «звездой» (Y) составляет 690В, а при соединении «треугольником» (D) – 400В. Номинальный ток при этом составляет 45 и 78А соответственно.
Поскольку в России стандартным считается трехфазное напряжение 400В 50Гц, рабочим для данного двигателя является соединение его обмоток «треугольником».
А что же произойдет, если, сохранив напряжение питания 400В, соединить обмотки двигателя «звездой»?
В случае, когда на валу двигателя постоянно присутствует номинальная нагрузка, такое переключение приведет к росту потребляемого тока. А вот если на валу двигателя в момент пуска нагрузка отсутствует или незначительна, потребляемый ток снизится в 3 раза. Мы не будем здесь приводить математические вычисления, но поверьте – это действительно так.
Из других наших статей, посвященных винтовым компрессорам, Вы уже знаете, что они могут работать в двух режимах – нагрузки и холостого хода. Запуск компрессора всегда происходит на холостом ходу, т.е. нагрузка на вал двигателя очень мала. Поэтому мы смело можем на этапе разгона соединить обмотки двигателя «звездой» для снижения пускового тока.
И лишь через некоторое время (интервал зависит от мощности двигателя, но обычно не превышает 10 секунд) произвести быстрое переключение обмоток на соединение «треугольником».
Как же это реализуется на практике?
Для коммутации обмоток двигателя применяют схему, состоящую из трех контакторов:
Силовая часть схемы «звезда – треугольник»
При запуске сначала включаются контакторы КМ1 и КМ3, соединяя обмотки двигателя в «звезду». Через заданный промежуток времени, отведенный на разгон, контактор КМ3 отключается, а контактор КМ2 включается. Обмотки двигателя соединяются в «треугольник». Переключение контакторов КМ2 и КМ3 происходит очень быстро (доли секунды).
В тоже время ситуация, когда оба контактора включены (это привело бы к короткому замыканию) невозможна благодаря наличию между ними механической блокировки (на схеме показана небольшим треугольником).
Реально собранная схема «звезда – треугольник» выглядит примерно так:
Схема «звезда – треугольник» в сборе
Сигналы на включение контакторы получают от цепей контроля управления и индикации, которые мы рассмотрим ниже.
Для снижения пусковых токов в силовой части винтовых компрессоров применяют также так называемые устройства плавного пуска (УПП). Хотя УПП применяются не так часто, как схемы «звезда – треугольник», скажем о них несколько слов.
2. Описание электрической схемы | Fermer.Ru — Фермер.Ру — Главный фермерский портал
Вся схема блока управления (рис. 2) разбита следующим образом: U1, U2, A1…A7, R1…R4 размещены на первой плате (БИТВ), D1…D7, A8, A9 на второй плате (БУПВС) и блок питания A11 на третьей плате. Блоки A10…A13, элементы коммутации и индикации размещены и выполнены объемным монтажом в корпусе.
Рис. 2. Схема электрическая инкубатора А-120Б.
Все платы размещены в отдельном корпусе, где внешние соединения между платами, датчиками и исполнительными устройствами выполнены посредством разъемов. Данное решение вызвано необходимостью оперативной замены неисправной платы блока управления исправной платой за считанные минуты, что позволяет обеспечить страховку в критических ситуациях.
Измерение температуры в канале сухого и влажного термометров (рис. 3) основано на зависимости падения напряжения на P-N переходе от температуры при фиксированной величине тока (на схеме в качестве датчиков температуры изображены диоды VD2 и VD3). За основу взята схема из [3], где был доработан узел стабильного тока, а схема усилителя постоянного тока переведена на однополярное питание и был разработан блок образцовых напряжений. В узле стабильного тока токоограничивающий резистор был заменен генератором стабильного тока на ОУ (DA2.2, DA3.2), за основу взята схема изображенной на рис. 2.7б. из [4], которая также переведена на однополярное питание. В усилитель постоянного тока (ОУ DA2.4, DA3.4) тоже были внесены изменения по цепи смещения уровня напряжения.
Рис. 3. Схема электрическая блока измерения температуры и влажности
Включение компаратора напряжения (DA4.3, DA4.4) стандартное, работающие на усилитель (VT2) с оптронной нагрузкой. В оптронный узел (VU1) для управления симистором внесена доработка: в коллектор транзистора параллельно светодиоду включен резистор R48. Это связано с тем, что при погашенном светодиоде цепь коллектора оказывается разорванной и это ведет к неконтролируемому включению оптрона под воздействием помех, несмотря на выключенное состояние транзистора. Включение резистора исключает разрыв цепи при погашенном светодиоде и цепь коллектора делает оптрон менее восприимчивым к наводимым импульсным помехам.
В большинстве схем терморегуляторов питание осуществляется интегральными стабилизаторами серии КР142, где зачастую они применяется и для питания измерительных мостов с датчиками температуры. Подобное решение вызывает погрешность работы схемы, особенно для ситуации, когда потребление тока в схеме изменяется скачками (например, включение или выключение сильноточных реле), которые влекут за собой изменение порога образцового напряжения для компаратора. Поэтому получить точность поддержки температуры лучше, чем 0,3…0,4C сложно. С другой стороны изменение окружающей температуры также влияет на точность поддержки температуры, ухудшая еще на 0,05…0,1C.
Для уменьшения зависимости от скачков напряжения в сети, температуры и влияние тока нагрузки применена двойная стабилизация образцового напряжения. Для уменьшения влияния внешней температуры в параметрическом стабилизаторе применен прецизионный стабилитрон типа КС191Ф с наименьшим ТКС (0,0005%/К). Для устранения взаимного влияния цепей нагрузок и на параметрический стабилизатор напряжения применены усилители-повторители DA1.1…DA1.4.
Напряжение +9,1V служит в качестве опорного для преобразователей U/I и делителей. Усилитель DA1.1 обслуживает цепи канала сухого термометра, DA1.2 – цепи канала влажного термометра и DA1.4 – цепи оконного компаратора температуры. На выход DA1.2 дополнительно подключен делитель с отводами на 6V и 1V. Напряжение 6V создает потенциал “искусственная земля” для преобразователей U/I, напряжение 1V выполняет роль опорного напряжения для регулировки смещения усилителей DA2.4 и DA3.4, а также служит в качестве “общий” для клеммы входа “COM” вольтметра-индикатора температуры.
Оконный компаратор состоит из двух компараторов DA4.1 и DA4.2, включенных по стандартной схеме, с учетом специфики однополярного питания. Делители для задания верхнего и нижнего порога температуры сигнализации аналогичны тем, которые задают пороговую температуру регулирования в канале сухого и влажного термометров.
В БУПВ (рис. 4) генератор импульсов выполнен на DD2.1 с возможностью подстройки периода. Счетчик-делитель для поворота и сигнализации поворота выполнены на DD3 и DD4 типа К561ИЕ16. Применение указанного типа счетчиков вызвано необходимостью дискретной регулировки временных характеристик поворота, увлажнения и сигнализации поворота. Время поворота задается установкой перемычки в контакты “13”…“16” коммутационного поля, время сигнализации поворота задается установкой перемычки в контакты “1”…“4” и период увлажнения задается установкой перемычки в контакты “5”…“12”. Резисторы R6 и R8 служат для исключения на входах элементов DD1.2 и DD5.2 подвешенного состояния (обрыва) в момент перестановки перемычек.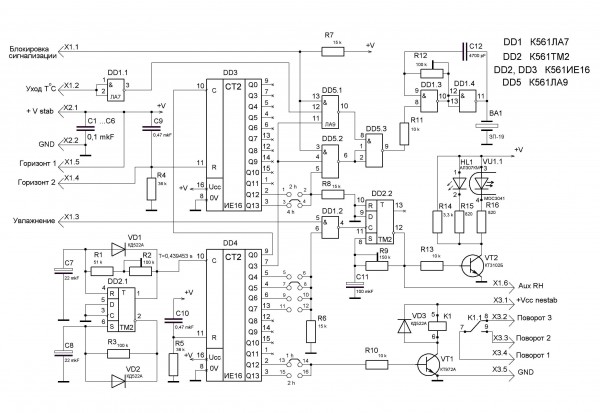
Рис. 4 Схема электрическая блока поворота, увлажнения и сигнализации.
Узел увлажнения выполнен на DD1.2, DD2.2, VT2. На DD2.2 выполнен одновибратор запускаемый по фронту, где длительность открытия электроклапана задается подстроечным резистором R9.
Узел сигнализации состоит из логики управления на DD5.1…DD5.3 и звукового генератора на DD1.3, DD1.4 нагруженного на пьезоэлектрический излучатель. При необходимости звуковую сигнализацию можно отключить выключателем SA2, соединенного между X1.1 и общим проводом (см. рис. 2).
Управление узлом поворота производится с помощью контактов реле K1.1 (см. рис. 4), где положение контактов определяет направление поворота лотков.
Блок питания (рис. 5) состоит из выпрямительного моста на VD1…VD4, стабилизатора напряжения +12V на DA2, узла формирования тока заряда аккумулятора на DA1, узла сравнения на DA3.3, электронного ключа зарядки на VT1 VT2, узла индикации заряда аккумулятора на DA3.4, узла сигнализации напряжения сети на DA3.2 и маломощного преобразователя напряжения на, выполненного на DA3.1, VT3, T1 и DA4.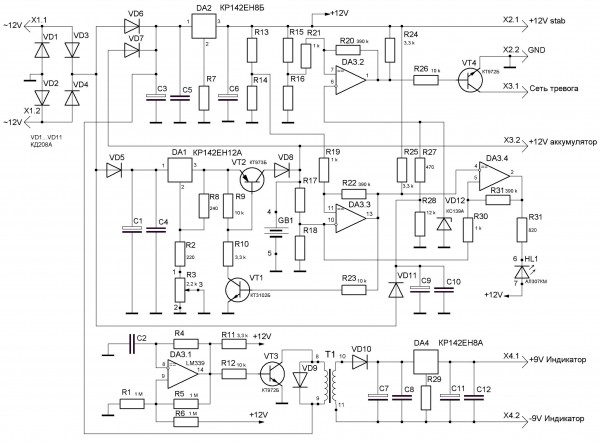
Рис. 5. Схема электрическая принципиальная блока питания с резервированием.
Узел формирования тока заряда аккумулятора представляет стабилизатор напряжения с регулируемым выходом, где величина тока заряда образуется за счет разницы напряжений на аккумуляторе и выхода стабилизатора. Выходное напряжение стабилизатора на DA1 регулируют с помощью резистора R3.
Узел сравнения служит для сравнения напряжения на делителе R13, R14 стабилизатора +12V и на делителе аккумулятора R17, R18 и вырабатывает управляющий сигнал для включения/выключения электронного ключа зарядки в зависимости от знака разницы напряжений между аккумулятором и делителя R13, R14.
Узел индикации заряда аккумулятора предназначен для указания режима аккумулятора заряд/хранение и особых примечаний не имеет.
Узел сигнализации напряжения в сети введен в схему блока питания в качестве дополнительного сервиса и его работа основана на сравнении напряжения RC цепочки C9, C10, R28 и делителя R15, R16. Если напряжение в сети отсутствует, то компаратор DA3.2 зафиксирует UR15R16>UVD12 и выдаст открывающий сигнал на транзистор VT4, у которого в цепь коллектора включен пьезоэлектрическая сирена (подобные устройства применяются в системах оповещения и сигнализации) или обмотка реле на 12 V, контакты которого управляют электрическим звонком. Если напряжение в сети присутствует, то компаратор DA3.2 зафиксирует UR15R16
Преобразователь напряжения выполнен на компараторе DA3.2, VT3, трансформаторе T1, выпрямителе VD10, C7, C8 и стабилизатор DA4. Резистор R29 служит для подгонки выходного напряжения DA4 с точностью +/-0,1V.
Стабилизатор напряжения 12V выполнен по стандартной схеме с дополнительным резистором для подгонки выходного напряжения с точностью +/-0,05V.
В качестве аккумулятора GB1 применен герметический свинцовый аккумулятор емкостью 2 A•h, который обеспечит питание электронной части на протяжении 2…3 суток. Применение аккумулятора большей емкости, например автомобильного с емкостью 55 A•h встречает затруднения, так как компоненты узла формирования тока заряда в лучшем случае обеспечивает ток зарядки до 1 А. Если пользователя устраивает более длительное время заряда аккумулятора (48…72 часов) с меньшим током, то данная схема вполне подойдет.
В силовой части (рис. 6) для управления нагревателя EK1 и увлажнителя Y1 применено оптронное управление симистором по стандартной схеме. Резисторы R1 и R3 служат для ограничения тока оптодинистора, а R2 и R4 устраняют ложные включения симсторов VS1 и VS2 при отключении нагрузок.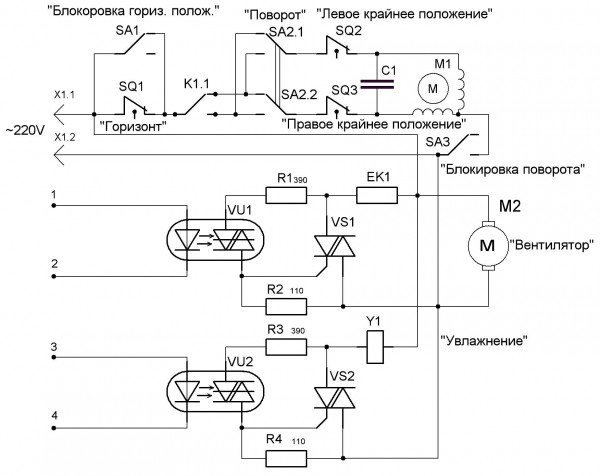
Рис. 6. Схема силовой части с сетевым питанием.
Расположение концевых датчиков схемы управления поворотом лотков показано в составе упрощенной кинематической схемы (рис. 7). Лотки 5 составляют в единую конструкцию в виде барабана, которая вращается на оси 6. На заднем торце оси 6 зафиксировано зубчатое полуколесо 4 с выступом 3, которое надавливает на концевой датчик SQ1 (для горизонтального положения), а боковые поверхности колеса надавливают на концевой датчик SQ2 (крайнее левое положение) и SQ3 (крайнее правое положение). Поворот осуществляется через зубчатую передачу 2 от двигателя со встроенным редуктором 1.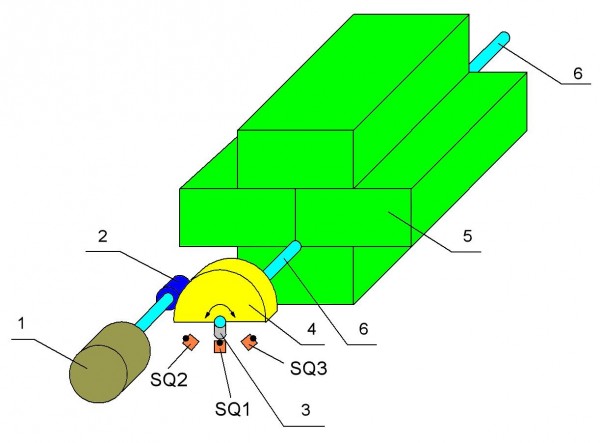
Рис. 7. Расположение концевых датчиков для управления поворотом.
Переключение направление поворота задается положением контактной группы реле K1 (см. рис. 4), которая перебрасывается с периодом 1 час (2 часа) для автоматического режима. В ручном режиме поворот осуществляется переводом в противоположное положение переключателя SА2 (см. рис 6). Фазировку обмоток двигателя надо выбрать образом, чтобы цепь питания двигателя размыкалось тем концевым выключателем, к которому приближается боковая поверхность зубчатого колеса при повороте.
Для перевода лотков в горизонтальное положение необходимо перевести в нижнее положение выключатель SА1 (см. рис. 6) и перевести SА2 в противоположное положение. При движении лотков (см. рис. 7) к противоположному положению выступ 3 полуколеса 4 надавит на концевой переключатель SQ1 и разомкнет цепь питания двигателя поворота. При необходимости полную блокировку поворота производят выключателем SА3.
Для ситуаций, когда в электроснабжении есть перебои, питание силовой части можно перевести на питание от аккумулятора (рис. 8).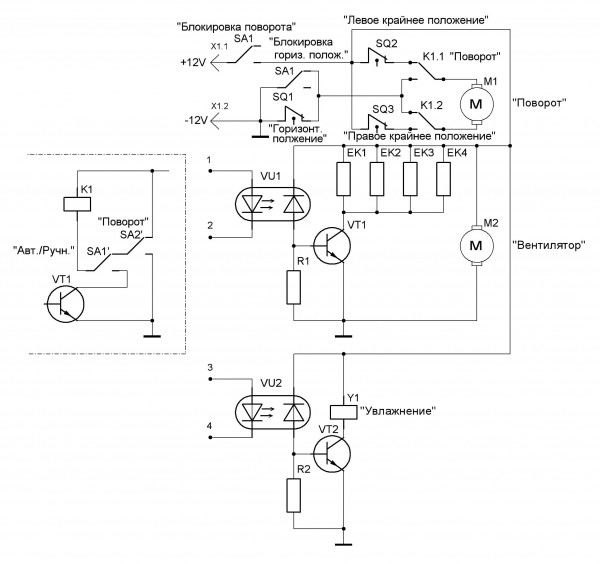
Рис. 8. Схема силовой части с аккумуляторным питанием.
Для возможности ручного поворота в цепь реле K1 БУПВС внесены изменения: введен переключатель S1’ для режима “Автоматический/ручной” и S2’ для смены направления поворота (доработка выделена прерывистой линией). Соответственно нагреватель, электроклапан увлажнения, вентилятор для конвекции и двигатель поворота должны быть предусмотрены для постоянного напряжения +12V, а для аккумулятора должно быть предусмотрено устройство подзарядки, аналогичное узлу подзарядки в составе блока питания рассмотренного выше. Управление нагревателем и элетроклапаном увлажнения для совместимости с сетевым вариантом оставлено оптронным, кроме того, помехоустойчивость лучше по сравнению с релейным управлением (нет искрения в моменты включение/отключение нагревателя).
4.4 Системы управления силовых электронных аппаратов
4.4.1 Общие сведения о системах управления
В силовых электронных аппаратах и других устройствах принято различать силовую часть и систему управления (СУ). К силовой части относят электрические цепи и элементы, которые непосредственно участвуют в передаче электрической энергии от первичного источника потребителю. Иногда эти цепи совместно с силовыми элементами называют главными, так как они определяют основные технико-экономические показатели устройства и, в свою очередь, его КПД. Силовая часть аппарата по существу является силовым исполнительным органом, определяющим главные функции аппарата. Например, силовая часть простейшего тиристорного реле постоянного тока состоит из одного тиристора и электрических соединений, обеспечивающих его связь с коммутируемой электрической цепью.
Учитывая определяющее влияние силовой части на технико-экономические характеристики устройства в целом, ее изучению уделяется обычно основное внимание. Однако для функционирования силовых элементов схемы (транзисторов, тиристоров и других) необходимо подавать на них соответствующие сигналы управления. Эти сигналы формируются другой составной частью устройства – системой управления. В отличии от силовой части СУ в основном принимает, обрабатывает и выдает информацию. Поэтому СУ состоит в основном из элементов и функциональных узлов, связанных с информационными потоками. При этом уровень потребляемой энергии обычно стремятся по возможности снизить.
Система управления силового электронного устройства обычно выполняет следующие функции:
Формирование сигналов управления силовыми элементами;
Регулирование выходных параметров;
Включение и отключение по заданному алгоритму;
Обмен информацией с внешней средой.
К системе управления относят также элементы и узлы, обеспечивающие текущий контроль состояния устройства в целом, диагностику отказов и управление защитными устройствами.
На рис. 4.4.1 приведена обобщенная структура СУ. В структуре выделены некоторые функциональные блоки, характерные для СУ силовых электронных устройств.

Рис. 4.4.1 Обобщенная структурная схема системы управления электронного аппарата
Блок датчиков Д содержит датчики регулируемых и контролируемых параметров. Так как обычно регулируются выходные параметры, то часть датчиков непосредственно входит в обратную связь канала регулирования. Сигналы с этих датчиков поступают на регулятор РЕГ, в функции которого входит формирование закона управления элементами силовой части. Блок ФИУ формирует импульсы управления, непосредственно поступающие на силовые элементы. По существу ФИУ является согласующим устройством между входами силовых приборов и выходом регулятора. Сигналы регулятора обычно являются маломощными и не отвечают требованиям, предъявляемым к импульсам управления силовых приборов (тиристоров, транзисторов и др.). Блок ФИУ называют также «драйвером».
Узлы СУ выполняют на различной элементной базе: дискретные и интегральные электронные компоненты, электромагнитные реле и др. Для функционирования этих элементов требуются источники электропитания. В составе структуры имеется блок вторичных источников питания для собственных нужд, называемых также источниками оперативного питания ИОП. В ИОП используются различные виды преобразователей и регуляторов, согласующих параметры входного (иногда и выходного) напряжения силовых цепей с параметрами, требуемыми для питания элементов СУ.
При питании от сети переменного тока, основой ИОП обычно служат маломощные трансформаторы с несколькими вторичными обмотками на различные напряжения. Эти обмотки подключают в выпрямителям с выходными, обычно емкостными, фильтрами. Для стабилизации уровней выходных напряжений маломощных выпрямителей используют стабилитроны или транзисторные регуляторы непрерывного действия в дискретном или интегральном исполнении. В целях улучшения массогабаритных показателей получила распространение структура ИОП с бестрансформаторным входом. В этой структуре переменное напряжение силовой цепи непосредственно поступает на выпрямитель, выходное напряжение которого преобразуется инвертором в переменное напряжение повышенной частоты (обычно 10-50кГц). Затем это напряжение трансформируется, снова выпрямляется и фильтруется. Трансформация и фильтрация при повышенных частотах позволяет существенно уменьшить массу и габаритные размеры ИОП.
При питании ИОП от силовых цепей постоянного тока постоянное напряжение также инвертируется на повышенной частоте в переменное, затем трансформируется, выпрямляется и фильтруется.
Текущий контроль и диагностика устройства осуществляется блоком УКД, на вход которого поступают сигналы с датчиков контролируемых параметров.
Результаты контроля диагностики поступают на блок обработки информации ИНФ и затем с его выхода – на защитные устройства ЗУ, Блок ИНФ также в общем случае может связывать все устройства со внешней средой. Например, в него могут поступать сигналы команд на включение, выключение, изменение режима работы. Обычно эти сигналы обрабатываются или транслируются непосредственно в блок коммутационной аппаратуры КА. С другой стороны из блока обработки информации могут исходить сигналы о состоянии устройства, режиме его работы, информация о причине отключения или срабатывания защит и др.
Представленная на рис. 4.4.1 структура является обобщенной. В ней отражены характерные укрупненные функциональные блоки. В реальном аппарате значительная часть из них может отсутствовать или находится в неявном конструктивном или функциональном виде. Обмен с внешней средой может осуществляться посредством тумблеров или кнопок, а о состоянии аппарата будут давать информацию обыкновенные сигнальные лампы накаливания. Однако, для того чтобы понять принцип действия аппарата, его функции и возможности, необходимо уметь представить структуру СУ и ее функциональные узлы. При этом функциональная законченность узла или блока не обязательно имеет отдельную конструкцию в виде отдельной платы, модуля и др.
Так как силовые электронные аппараты обычно выполняются на электронных ключах, по принципу действия их СУ являются дискретными или импульсными. Соответственно элементная база СУ часто сочетает элементы как цифровой, так и аналоговой техники, обрабатывающей непрерывные сигналы, например тока или напряжения. Эти сигналы затем снова могут преобразовываться в импульсную форму.