


Типовые схемы управления приводами с двигателями постоянного тока
Категория:
Электрооборудование строительных машин
Публикация:
Типовые схемы управления приводами с двигателями постоянного тока
Читать далее:
Типовые схемы управления приводами с двигателями постоянного тока
Схема управления двигателем постоянного тока с параллельным, возбуждением (рис. 74). Якорь двигателя включается контактами контакторов 1В и 2В или 1Н и 2Н. Последовательно с якорем включаются пусковые сопротивления, являющиеся в данной схеме одновременно регулировочными. Каждая пусковая ступень может быть зашун тирован а соответствующим контактом контакторов ускорения 1У, 2У и ЗУ. Включение якорной цепи осуществляется контактом линейного контактора Л. Параллельно якорю двигателя посредством з. к. контактора Т подключается сопротивление динамического торможения. Кроме того, параллельно якорю присоединяется катушка реле динамического торможения РДТ.
Пуск двигателя «Вперед» осуществляется путем включения контактов командоконтроллера К1, К2, К4, К5 и Кб. При этом включаются линейный контактор Л, контакторы 1В, 2В и двигатель подключается в сеть
через пусковое сопротивление. После срабатывания контактора Л катушка реле ускорения 1РУ теряет питание. Одновременно через замыкающий бло-7 кировочный контакт 1В подается питание на К4, К5 и Кб. Контактор ускорения 1У срабатывает через интервал, определяемый выдержкой времени реле 1РУ. После срабатывания контактора 1У накоротко замыкается, катушка реле ускорения 2РУ, которая находилась под напряжением, равным падению напряжения на первой ступени пускового со-контактах К5 и Кб времени замыкаются лучает питание. Контактор Т, сработав, замыкает якорь двигателя на сопротивление и двигатель переходит в режим динамического торможения, которое заканчивается при 10—20% номинальной скорости двигателя.
Рекламные предложения на основе ваших интересов:
Рис. 74. Схема управления двигателем постоянного тока парал-лельного возбуждения
При замкнутых последовательно с выдержкой контакты 2РУ и ЗРУ, которые соответственно включают катушки контакторов ускорения 2У и ЗУ; эти контакторы шунтируют своими контактами ступени ускорения. Двигатель будет работать на естественной характеристике. Включение двигателя для работы «Назад» производится поворотом рукоятки командоконтроллера в направлении, противоположном направлению при пуске вперед. Процесс пуска при этом протекает аналогично.
Во время работы двигателя реле РДТ находится под напряжением, замыкающий контакт РДТ в цепи катушки контактора Т закрыт, но в это время один из размыкающих контактов 2Н или 2В открыт. При отключении двигателя от сети контакты 2В или 2Н закрываются и, так как закрыт контакт РДТ, катушка контактора Т по-
Защита двигателя осуществляется максимальным реле РМ и реле напряжения РН.
Схема управления двигателем постоянного тока, работающим в системе генератор — двигатель (рис. 75). Рассматриваемая схема обеспечивает работу двигателя для одного направления вращения и позволяет производить торможение в режиме генераторного торможения с отдачей энергии в сеть при остановке привода.
Пуск двигателя начинается с подключения цепи управления к источнику постоянного тока. Вследствие подачи питания к цепи управления реле РОП срабатывает и закрывает свои замыкающие контакты в цепи кнопки «Пуск». Далее включается приводной двигатель АД генератора Г. Для включения рабочего двигателя Д нажимают на кнопку «Пуск». При нажатии на эту кнопку замыкается цепь, в которой находятся реле 1РП, реле РМ, контакт реле РОП и кнопка «Стоп»
Обмотка контактора 2Л включается автоматически (поскольку обмотка реле 1РП замкнет свой контакт в цепи катушки 2Л), в результае чего включается и контакты контактора 2Л. Одновременно под напряжением окажется обмотка реле РУП.
Контактор 2Л подключает обмотку возбуждения генератора ОВГ к источнику постоянного тока. В обмотке ОВГ возникает ток, а на зажимах генератора э. д. с. В Цепи якорей двигателя и генератора будет проходить ток. Двигатель разгоняется до скорости, обусловленной положением движка реостата РВГ, регулирующего величину тока возбуждения генератора.
В обмотке ОВГ возникает ток, а на зажимах генератора э. д. с. В Цепи якорей двигателя и генератора будет проходить ток. Двигатель разгоняется до скорости, обусловленной положением движка реостата РВГ, регулирующего величину тока возбуждения генератора.
Реле РУП имеет две обмотки: одну — последовательную, включенную в цепь якоря двигателя, и другую — параллельную, подключенную к источнику постоянного тока. Намагничивающие силы, создаваемые этими обмотками, направлены встречно. Пока ток в цепи якоря не превосходит допустимого значения, якорь реле удерживается за счет действия параллельной обмотки; при этом замыкающие контакты реле замкнуты и в цепи ОВГ включена только часть сопротивления РВГ, заключенная между точками а и б. Если ток якоря превосходит допустимое значение, то н. с. (намагничивающая сила) последовательной обмотки нейтрализует н. с. параллельной обмотки и якорь реле отпадает. Замыкающие контакты реле РУП ра‘змыкаются, в цепь обмотки возбуждения вводится все сопротивление реостата РВГ.
Рис. 75. Схема управления двигателем постоянного тока в системе Г—Д
Для остановки двигателя нажимают на кнопку «Стоп». При этом параллельная катушка реле РУП теряет питание. Контакты реле размыкаются, и в обмотку возбуждения генератора вводится все сопротивление РВГ. Поскольку обмотка возбуждения остается включенной (питание катушки контактора 2JJ осуществляется в этом случае через контакты реле 2РП), ток в ней начинает убывать. Электродвижущая сила генератора уменьшается и, когда она окажется меньше э. д. с. двигателя, возникнет режим генераторного торможения с отдачей энергии в сеть. Двигатель начнет останавливаться. При снижении напряжения генератора до определенного значения отпадает якорь реле 2РП. Его замыкающие контакты отключают обмотку контактора 2Л, что приводит к тому, что замыкающие контакты 2Л отключат ОВГ от сети постоянного тока, а размыкающие Замыкаются и подсоединяют эту обмотку к якорю генератора.
Ограничение тока якоря в допустимых пределах при торможении осуществляет реле РУП. При опасных значениях тока это реле срабатывает и своими замыкающими контактами в цепи обмотки возбуждения генератора замыкает накоротко часть сопротивления РВГ.
Разрядное сопротивление Rp предохраняет обмотку возбуждения от перенапряжений в момент ее отключения. Реле максимального тока РМ отключает двигатель при возникновении в цепи яморя токов короткого замыкания.
Рекламные предложения:
Читать далее: Блокировочные связи в схемах управления электроприводами
Главная → Справочник → Статьи → Форум
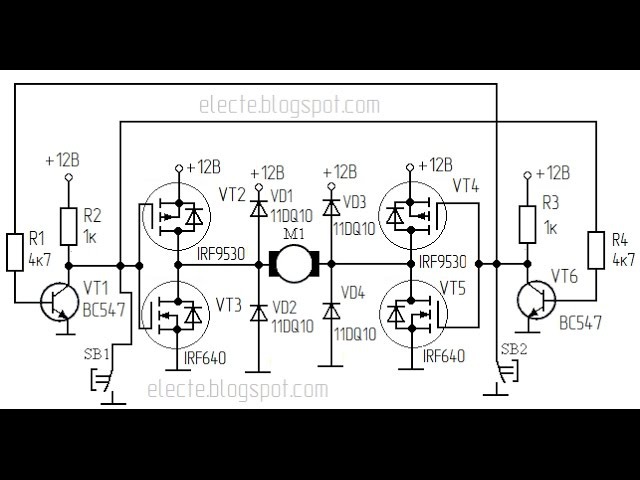
Мостовая схема управления двигателем постоянного тока
Читайте также
Машины постоянного тока
Машины постоянного тока
Вопрос. Что входит в объем испытаний машин постоянного тока?Ответ. В объем испытаний входит:определение возможности включения без сушки;измерение сопротивления изоляции обмоток и бандажей;испытание изоляции повышенным напряжением промышленной
Что входит в объем испытаний машин постоянного тока?Ответ. В объем испытаний входит:определение возможности включения без сушки;измерение сопротивления изоляции обмоток и бандажей;испытание изоляции повышенным напряжением промышленной
Токопроводы напряжением до 1 кВ переменного и до 1,5 кВ постоянного тока
Токопроводы напряжением до 1 кВ переменного и до 1,5 кВ постоянного тока Вопрос. Каковы требования к размещению токопроводов?Ответ. Должны быть выполнены следующие требования:в местах, где возможны механические повреждения, токопроводы должны иметь соответствующую
Глава 4.1. РАСПРЕДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА НАПРЯЖЕНИЕМ до 1 кВ ПЕРЕМЕННОГО ТОКА и до 1,5 кВ ПОСТОЯННОГО ТОКА
Глава 4.1. РАСПРЕДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА НАПРЯЖЕНИЕМ до 1 кВ ПЕРЕМЕННОГО ТОКА и до 1,5 кВ ПОСТОЯННОГО ТОКА Область применения
Вопрос. На какие РУ распространяется настоящая глава Правил?Ответ. Распространяется на РУ и НКУ напряжением до 1 кВ переменного тока и до 1,5 кВ
На какие РУ распространяется настоящая глава Правил?Ответ. Распространяется на РУ и НКУ напряжением до 1 кВ переменного тока и до 1,5 кВ
Двигатели постоянного тока
Двигатели постоянного тока Двигатели постоянного тока для любительского конструирования могут использоваться для движения и перемещения конструкций роботов (см. рис. 4.13). Для большинства таких двигателей характерны высокая частота вращения ротора и небольшой крутящий
Начальная схема управления
Начальная схема управления
На рис. 10.10 показан первый тестовый вариант схемы управления ШД. Для буферизации выходных сигналов с шин PIC 16F84 использованы шестнадцатеричные буферы типа 4050. Сигнал с выхода каждого буфера подается на транзистор NPN типа.
1.13. Фотоэлектричество при 48 вольтах постоянного тока: вспомнили о гениальном Эдисоне
1.13. Фотоэлектричество при 48 вольтах постоянного тока: вспомнили о гениальном Эдисоне Томас Альва Эдисон (1847–1931) был величайшим изобретателем своего времени. Он изобрел лампу накаливания (с угольной нитью), микрофон, значительно усовершенствовал телефон, придумал
Глава 4.1. РАСПРЕДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА НАПРЯЖЕНИЕМ ДО 1 КВ ПЕРЕМЕННОГО ТОКА И ДО 1,5 КВ ПОСТОЯННОГО ТОКА
Глава 4.1. РАСПРЕДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА НАПРЯЖЕНИЕМ ДО 1 КВ ПЕРЕМЕННОГО ТОКА И ДО 1,5 КВ ПОСТОЯННОГО ТОКА Область применения Вопрос 1. На какие распределительные устройства распространяется настоящая глава Правил?Ответ. Распространяется на распределительные устройства
1.
 8.14. Машины постоянного тока
8.14. Машины постоянного тока
1.8.14. Машины постоянного тока Вопрос 38. Как производится измерение сопротивления изоляции обмоток?Ответ. Производится при номинальном напряжении обмотки до 0,5 кВ включительно мегаомметром на напряжении 500 В, а при номинальном напряжении обмотки выше 0,5 кВ – мегаоммет-ром
Токопроводы напряжением до 1 кв переменного и до 1,5 кв постоянного тока
Токопроводы напряжением до 1 кв переменного и до 1,5 кв постоянного тока Вопрос 59. Какие требования должны быть выполнены при размещении токопроводов?Ответ. Должны быть выполнены следующие требования:1) в местах, где возможны механические повреждения, токопроводы должны
5.3.3. ЭЛЕКТРОПЕРЕДАЧИ ПОСТОЯННОГО ТОКА
5. 3.3. ЭЛЕКТРОПЕРЕДАЧИ ПОСТОЯННОГО ТОКА
Электропередачи и вставки постоянного тока обладают рядом экономически выгодных преимуществ по сравнению с передачами переменного тока. Так как на нормальный режим работы линии постоянного тока не оказывают влияния ее реактивные
3.3. ЭЛЕКТРОПЕРЕДАЧИ ПОСТОЯННОГО ТОКА
Электропередачи и вставки постоянного тока обладают рядом экономически выгодных преимуществ по сравнению с передачами переменного тока. Так как на нормальный режим работы линии постоянного тока не оказывают влияния ее реактивные
6.2.2. МАШИНЫ ПОСТОЯННОГО ТОКА ЕДИНЫХ СЕРИЙ
6.2.2. МАШИНЫ ПОСТОЯННОГО ТОКА ЕДИНЫХ СЕРИЙ Без существенного изменения конструктивных черт машины постоянного тока к 30-м годам нашего столетия стали более мощными, значительно расширился диапазон регулирования их частоты вращения. Как правило, машины постоянного тока
6.2.3. ТЯГОВЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА
6.2.3. ТЯГОВЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА
Пионером советского тягового электромашиностроения был завод «Электрик» (г. Санкт-Петербург), который в начале 1924 г. изготовил десять двигателей мощностью 110 кВт при частоте вращения 660 об/мин для тепловоза с
Санкт-Петербург), который в начале 1924 г. изготовил десять двигателей мощностью 110 кВт при частоте вращения 660 об/мин для тепловоза с
6.2.4. КРУПНЫЕ МАШИНЫ ПОСТОЯННОГО ТОКА
6.2.4. КРУПНЫЕ МАШИНЫ ПОСТОЯННОГО ТОКА Еще до войны производство крупных машин постоянного тока было сосредоточено на заводах «Электросила» и ХЭМЗ и развивалось ускоренными темпами. На заводе «Электросила» в предвоенные годы было изготовлено свыше 200 единиц крупных
6.2.5. ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ДЛЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
6.2.5. ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ДЛЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА В электроприводах постоянного тока различных механизмов еще с 20-х годов наряду с системами «генератор — двигатель» стали находить применение системы «преобразователь — двигатель», основанные на ионных
11.
 2.5. ПРЕОБРАЗОВАТЕЛИ ЛИНИЙ ПЕРЕДАЧИ ПОСТОЯННОГО ТОКА
2.5. ПРЕОБРАЗОВАТЕЛИ ЛИНИЙ ПЕРЕДАЧИ ПОСТОЯННОГО ТОКА
11.2.5. ПРЕОБРАЗОВАТЕЛИ ЛИНИЙ ПЕРЕДАЧИ ПОСТОЯННОГО ТОКА Линии передачи постоянного тока высокого напряжения предполагались как средство передачи энергии на большие расстояния. Первой опытно-промышленной линией была передача Кашира — Москва; до настоящего времени
Приложение Схема электрооборудования автомобиля ГАЗ-3110 с двигателем ЗМЗ-402
Приложение Схема электрооборудования автомобиля ГАЗ-3110 с двигателем ЗМЗ-402 1 – указатель поворота передний правый;2 – фара головного света правая;3 – лампы габаритного света передние;4 – лампы головного света;5 – противотуманная фара правая;6 – электровентилятор
Схемы включения двигателей постоянного тока
Фиг. 1. Схема включения двигателя постоянного тока параллельного возбуждения. 1. Схема включения двигателя постоянного тока параллельного возбуждения.
|
| Рис. 66. Схема включения двигателя постоянного тока с независимым возбуждением |
| Рис. 2.2.7. Схемы включения двигателей постоянного тока а — независимого возбуждения б — последовательного возбуждения в — смешанного возбуждения |
 Контактор отключается также при размыкании одного из конечных выключателей Ql и Q2. Проследим цепь питания катушки контактора один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера 3 или 4 (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (—Л2).
[c.276]
Контактор отключается также при размыкании одного из конечных выключателей Ql и Q2. Проследим цепь питания катушки контактора один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера 3 или 4 (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (—Л2).
[c.276]Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит У В. Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже. [c.277]
Измерительным прибором служит мост типа ЭТП-209 со сдвоенным реохордом для включения в систему слежения обратной связи. Реохорд задачи программы прибора РУ-5-01 и реохорд обратной связи измерительного прибора ЭТП-209 образуют мостовую схему. При наличии разбаланса в мостовой схеме сигнал поступает в усилительную аппаратуру и на исполнительные органы до устранения в системе разбаланса.
 Усилительной частью схемы служат ламповый и электромашинный усилитель типа ЭМУ-12А. Электромашин-ный усилитель работает в паре с двигателем постоянного тока серии П-12, нагружающим образец через соответствующую систему механического редуцирования.
[c.64]
Усилительной частью схемы служат ламповый и электромашинный усилитель типа ЭМУ-12А. Электромашин-ный усилитель работает в паре с двигателем постоянного тока серии П-12, нагружающим образец через соответствующую систему механического редуцирования.
[c.64]С высоким пусковым моментом, большим числом включении в час и регулированием скорости Двигатели постоянного тока последовательного или смешанного возбуждения, иногда с искусственными схемами соединения обмоток Механизмы подъема и передвижения кранов большой производительности и точности, вспомогательные металлургические механизмы, электрическая тяга [c.239]
Двигатели постоянного тока параллельного возбуждения 501, 513 — Пусковая диаграмма 503 — Схема включения 501 — Торможение — Схема 502 —Характеристики 502, 503, 504, 505, 513 [c.708]
Схема электропривода напорного механизма. Этот механизм приводится в действие двигателем постоянного тока ДН, включенным последовательно в цепь якоря генератора напора ГН. Электриче-
[c.272]
Электриче-
[c.272]
Схема электропривода поворотного механизма. Для приведения в действие механизма поворота на экскаваторе ЭКГ-4,6 применяются два двигателя постоянного тока 1ДВ и 2ДВ, которые получают питание от генератора поворота ГВ. Электрическая схема управления этим приводом также не отличается от рассмотренной выше схемы привода подъема, за исключением того, что здесь отсутствует узел ослабления поля двигателя. Кроме того, в рассматриваемой схеме предусматривается реле контроля напряжения РП, включенное на падение напряжения в главной цепи (точки 210—240). Это реле включает узел гашения ноля генератора (н. о. контакты 252). [c.273]
Схема электропривода механизма подъема ковша. Подъемная лебедка приводится в действие двигателем постоянного тока ДП (см. рис. 177), включенным последовательно в цепь трехобмоточного генератора подъема ГП. [c.279]
В электроприводе лифтов наиболее часто используют схему включения двигателя с независимым возбуждением (рис. 66). Напряжение и с от источника постоянного тока подводится к зажимам якорной обмотки и Я2, а напряжение и в — к шунтовой обмотке возбуждения двигателя ОВд на зажимы Ш1 и Ш2.
[c.106]
66). Напряжение и с от источника постоянного тока подводится к зажимам якорной обмотки и Я2, а напряжение и в — к шунтовой обмотке возбуждения двигателя ОВд на зажимы Ш1 и Ш2.
[c.106]
В электрических приводах для бесступенчатого изменения скорости вращения шпинделя используется свойство двигателей постоянного тока плавно изменять число оборотов ротора при определенной схеме включения. Однако отсутствие в цехе источников постоянного тока весьма затрудняет использование этого метода на практике. Такая схема регулирования не получила заметного применения и встречается лишь в нескольких моделях токарных автоматов и редко в других моделях станков. [c.24]
Основными обмотками статора двигателя постоянного тока являются шунтовая и сериесная обмотки возбуждения, использующиеся для создания различных схем включения двигателей. [c.125]
Математические модели генераторов и двигателей постоянного тока общеизвестны. Наличие нелинейной характеристики намагничивания и обмотки самовозбуждения генератора усложняет обычную структуру модели генератора.![]() Математическая модель рассматриваемого генератора получается на основе электромагнитных контуров схемы включения.
[c.412]
Математическая модель рассматриваемого генератора получается на основе электромагнитных контуров схемы включения.
[c.412]
Общий метод расчета механической характеристики двигателей постоянного тока в рассматриваемой схеме (рис. 7-1) включения заключается в нахождении за-, висимостей / =/ (/,1.) и /ц, =/(/я ) и последующем переходе к зависимости n, = f(M,). [c.137]
Тяговые двигатели электровозов переменного тока, которые часто называют двигателями пульсирующего тока, по своей конструкции и схеме включения несколько отличны от обычных двигателей постоянного тока. Для снижения пульсационных потерь в магнитной системе машины обмотки возбуждения постоянно шунтированы активным сопротивлением как показано на рис. 39 и 41. [c.48]
Для управления двигателями постоянного тока, так же как и переменного, можно применять магнитные контроллеры. Схема управления с магнитным контроллером типа П, изображенная на рис. 6.23, предназначена для механизмов передвижения. Этот контроллер имеет симметричную схему включения, в которой предусмотрены торможение противовключением и регулирование частоты вращения пусковыми резисторами.
[c.280]
6.23, предназначена для механизмов передвижения. Этот контроллер имеет симметричную схему включения, в которой предусмотрены торможение противовключением и регулирование частоты вращения пусковыми резисторами.
[c.280]
В приведенной на рис. 103, б схеме регулятора органом сравнения служит механический дифференциал Д. Сравнение выходного сигнала с МЭП и заданного осуществляется следующим образом. Угловая частота выходного вала 1 дифференциала Др, вращательное движение которого преобразуется винтовой парой 2 в поступательное перемещение ЭИ, зависит от разности угловых частот вращения входных валов дифференциала. Один из этих валов вращается асинхронным двигателем Д с неизменной угловой частотой Шз, а другой (4) — с частотой С04 двигателем постоянного тока, якорь Я которого включен на балластный резистор Я в цепи ГИ— МЭП. Угловая частота выходного вала 1 дифференциала Др [c.178]
Обычно для изменения скорости растяжения образца применяются схемы регулирования числа оборотов электродвигателя постоянного тока с помощью включения в обмотку якоря или обмотку возбуждения управляющего реостата. Включение реостата требует значительного дополнительного расхода электроэнергии в цепи управления. Кроме того, сопротивление реостата ограничивает пределы изменения частоты вращения электродвигателя в области низких значений скорости растяжения, поэтому при такой схеме регулирования приходится использовать электродвигатель с заведомо увеличенной в несколько раз мощностью с тем, чтобы при минимальной частоте вращения получить требуемое значение крутящего момента на валу двигателя и, таким образом, усилие растяжения образца.
[c.84]
Включение реостата требует значительного дополнительного расхода электроэнергии в цепи управления. Кроме того, сопротивление реостата ограничивает пределы изменения частоты вращения электродвигателя в области низких значений скорости растяжения, поэтому при такой схеме регулирования приходится использовать электродвигатель с заведомо увеличенной в несколько раз мощностью с тем, чтобы при минимальной частоте вращения получить требуемое значение крутящего момента на валу двигателя и, таким образом, усилие растяжения образца.
[c.84]
Выбрав тип и габарит двигателя, намечают по каталогу его механические характеристики— пусковые, тормозные, регулировочные, рабочие, соответственно фиксируя число ступеней пуска, торможения, регулирования скорости. Попутно решают вопрос о роде управления, которое может быть автоматическим, полуавтоматическим, ручным. Последнее в современной практике по условиям производительности, качества продукции, надёжности, расхода энергии и т. п. почти не применяется. Выбирая характеристики двигателя, тем самым намечают схему включения главных цепей двигателя якоря и обмотки возбуждения в машинах постоянного тока, статора и ротора — в асинхронных машинах.
[c.3]
почти не применяется. Выбирая характеристики двигателя, тем самым намечают схему включения главных цепей двигателя якоря и обмотки возбуждения в машинах постоянного тока, статора и ротора — в асинхронных машинах.
[c.3]
Барабанные контроллеры типа КПС и кулачковые контроллеры типа ПКС постоянного тока, предназначающиеся исключительно для управления сериесными электродвигателями механизмов подъёма—спуска, позволяют включать двигатели на положе-. ниях подъёма по нормальной схеме реостатного пуска, а на положениях спуска — по шунтовой схеме, осуществляя тормозной или силовой моменты в зависимости от величины спускаемого груза. В них предусматривается конечное включение вспомогательного тока и допускается присоединение шунтового или сериесного тормозного магнита. [c.851]
Для. быстрой остановки привода может применяться электрическое торможение динамическое или противовключением. На фиг. 3 изображена схема динамического торможения короткозамкнутого двигателя. Пуск двигателя производится обычно кнопкой. При нажатии кнопки Стоп , которая имеет два контакта, двигатель отключается от сети линейным контактором Л, после чего включается тормозной контактор Т. Статор подключается к постоянному току от выпрямителя ТВ. Торможение длится в течение выдержки времени реле, пристроенного к контактору. Контакторы Л ж Т сблокированы НЗ блокконтактами. Одновременное включение обоих контакторов могло бы привести к выходу из строя выпрямителя.
[c.543]
Пуск двигателя производится обычно кнопкой. При нажатии кнопки Стоп , которая имеет два контакта, двигатель отключается от сети линейным контактором Л, после чего включается тормозной контактор Т. Статор подключается к постоянному току от выпрямителя ТВ. Торможение длится в течение выдержки времени реле, пристроенного к контактору. Контакторы Л ж Т сблокированы НЗ блокконтактами. Одновременное включение обоих контакторов могло бы привести к выходу из строя выпрямителя.
[c.543]
Вращение от электродвигателя постоянного тока 12 через клиноременную передачу передается гидронасосу 11. Скорость перемещения датчика регулируется изменением подачи масла в гидросистему через число оборотов электродвигателя и эксцентриситет гидронасоса. Гидронасос имеет реверс, что позволяет менять направление перемещения. Масляная магистраль от насоса через кран переключения рода работы 13 подводится к золотнику управления двигателями 8. Золотник перемещается электромагнитами 1 я 2, снабженными микровыключателями 9. Пуск двигателя (схема пуска на рисунке не показана) сблокирован с включением электромагнита 1. При этом золотник 8 перемещается в верхнее положение.
[c.244]
Пуск двигателя (схема пуска на рисунке не показана) сблокирован с включением электромагнита 1. При этом золотник 8 перемещается в верхнее положение.
[c.244]
С высоким пусковым моментом, большим числом включений в час и регулироианием сио- рости Двигатели постоянного тока последовЭ тельного или смешан кого возбуждения, иногда с искусственными схемами соединения обмоток, а также системы с регулируемым напряжением 1ЮСтоя иного тока Механизмы подъема и передвижения кранов S большой производитель- ности и точности, вело- 1 могательные металлур- i гические механизмы, 1 электрическая тяга [c.126]
Сравнение видов электрического торможения. Рекуперативное торможение можно применять в шунтовых двигателях постоянного тока с регулированием скорости током возбуждения и в короткозамкнутых асинхронных Двигателях с переключением полюсов. Выбор между противовключеняем и динамическим торможением зависит от требуемой быстроты торможения и точности остановки при одинаковых исходных токах в якоре торможение противовключением более эффективно, так как тормозной момент при противо-включении меняется мало, а при динамическом торможении спадает до нуля. Динамическое торможение практически считается наиболее точным. Для реверсивных приводов чаще применяют противовключение, для нереверсивных— динамическое, так как схема последнего проще.
[c.8]
Динамическое торможение практически считается наиболее точным. Для реверсивных приводов чаще применяют противовключение, для нереверсивных— динамическое, так как схема последнего проще.
[c.8]
Контроллерные диаграммы. Каждая автоматическая схема имеет несколько характерных положений замыкания её элементов. Возьмём для примера нереверсивный сериес-ный двигатель постоянного тока, предназначенный для пуска в одну сторону по трём механическим характеристикам. Схема будет иметь четыре характерных положения включения её автоматических аппаратов а) покой б, в, г) работа на первой, второй и третьей характеристиках. Для уяснения основных условий работы схемы автоматизированного электропривода служит контроллерная диаграмма, Она показывает число типичных положений схемы, число включённых в неё главных аппаратов и какие аппараты включены при каждом положении. Для иллюстрации на фиг. 86 показана схема главной цепи реверсивного сериесного двигателя с двумя парами реверсирующих контакторов, из ко- [c.
 62]
62]| Рис. 14.129. Схема автоматического регулирования скорости вращения барабана многоиратного волочилвнопо стана с приводом от двигателей постоянного тока. Двигатели 9 (рис. а) вращают барабаны 4. Проволока 1, огибая барабан, направляется вокруг натяжного ролика 7, затем вокруг холостого ролика 8 и далее через фильер 3 к следующему барабану. Чтобы исключить образование петель и проскальзывание проволоки, натяжной ролик 7 (рис. б), посаженный на ось рычага 15, связанного с зубчатым сектором 12, при повороте смещает ползунок реостата 5, включенного в цепь обмотки возбуждения предшествующего двигателя. Величина натяжения проволоки механически регулируется связанной с роликом 7 пружиной 14. Рычаги 15 и 13 должны располагаться так, чтобы противонатяжение составляло 10—30% от усилия волочения с отклонением не более 10% от принятой величины. |
 В случае повреждения приводного электродвигателя постоянного тока или агрегата Г—Д, привод может работать от асинхронного двигателя, питающегося непосредственно от сети. Муфта, соединяющая асинхронный двигатель, включена. При отсутствии электроэнергии во внешней сети из-за ее повреждения генератор постоянного тока агрегата Г—Д может работать от дизеля, посредством включения фрикционной муфты, соединяющей дизель с генератором асинхронный двигатель при этом отключается. И, наконец, если вследствие неисправности электромашин или повреждения в цепи управления, ни один из перечисленных способов не может быть осуществлен, привод может быть приведен в действие непосредственно от дизеля.
[c.566]
В случае повреждения приводного электродвигателя постоянного тока или агрегата Г—Д, привод может работать от асинхронного двигателя, питающегося непосредственно от сети. Муфта, соединяющая асинхронный двигатель, включена. При отсутствии электроэнергии во внешней сети из-за ее повреждения генератор постоянного тока агрегата Г—Д может работать от дизеля, посредством включения фрикционной муфты, соединяющей дизель с генератором асинхронный двигатель при этом отключается. И, наконец, если вследствие неисправности электромашин или повреждения в цепи управления, ни один из перечисленных способов не может быть осуществлен, привод может быть приведен в действие непосредственно от дизеля.
[c.566]Рнс. 16. Прннципиаль пая схема включения выпрямителя в цепь тягового двигателя постоянного тока [c.16]
На рис. 14, б представлена схема ПМУ мощностью до 0,5 кет. Схема состоит из питающего однофазного трансформатора Тр с двумя вторичными обмотками 2иЗ, двигателя постоянного тока Д и магнитного усилителя. В магнитный усилитель входят две обмотки управления ОУ и ОУа и две рабочие обмотки ОР и ОР , включенные в плечи выпрямительного моста. Обмотка трансформатора 2 питает цепь якоря двигателя Д, а обмотка 3 питает обмотку возбуждения ОВД двигателя. Выпрямление тока в каждой цепи осуществляется дву хполу пер йодным выпрямителем В1— В4 — в цепи якоря и 1В—4В — в цепи возбуждения.
[c.41]
В магнитный усилитель входят две обмотки управления ОУ и ОУа и две рабочие обмотки ОР и ОР , включенные в плечи выпрямительного моста. Обмотка трансформатора 2 питает цепь якоря двигателя Д, а обмотка 3 питает обмотку возбуждения ОВД двигателя. Выпрямление тока в каждой цепи осуществляется дву хполу пер йодным выпрямителем В1— В4 — в цепи якоря и 1В—4В — в цепи возбуждения.
[c.41]
На фиг. 496 показана одна из схем включения двух вентилей, через которые от трансформатора однофазного тока производится питание электроэнергией двигателя постоянного тока. В моменты, когда на вторичной обмотке трансформатора возникает напряжение, которое может вызвать ток от точки а к точке х, фактически ток возникает только в цепи полуобмотка трансформатора о—х, [c.404]
Для автоматического пуска асинхронных двигателей с фазовым ротором или двигателей постоянного тока применяются магнитные контроллеры (контакторные панели), представляющие собой комплект контакторов и реле, соединеннных по определенной схеме. Все сказанное о магнитном пускателе полностью осуществихмо в случае управления электродвигателями с помощью магнитных контроллеров. При напряженном режиме работы, характеризующемся большим числом включений в час, и при значительной мощности двигателя, когда управление с помощью обычного (ручного) контроллера становится затруднительным, применяют магнитные контроллеры. При весьма тяжелых режимах работы кранов, при питании кранов переменным током применя-
[c.94]
Все сказанное о магнитном пускателе полностью осуществихмо в случае управления электродвигателями с помощью магнитных контроллеров. При напряженном режиме работы, характеризующемся большим числом включений в час, и при значительной мощности двигателя, когда управление с помощью обычного (ручного) контроллера становится затруднительным, применяют магнитные контроллеры. При весьма тяжелых режимах работы кранов, при питании кранов переменным током применя-
[c.94]
Электроконтактные регуляторы применяются в двигателях малой мощности. На рис. 31.13 показан электроконтактный регулятор вибрационного действия. В момент включения двигателя ток проходит через замкнутые контакты 3 регу-лятора и подается в цепь питания двигателя. При увеличении частоты вращения сила инерции груза 2 преодолевает силы сопротивления пружин / и 4, отклоняет груз 2 и размыкает контакты 3. Частота вращения якоря уменьшается, вследствие чего контакты вновь замыкаются, и процесс повторяется. Непрерывное замыкание и размыкание контактов дают возможность авто. матически поддерживать угловую скорость Ыср, близкую к постоянной. Изменение задаваемой угловой скорости в этих регуляторах осуществляется подбором элементов электрической схемы.
[c.400]
матически поддерживать угловую скорость Ыср, близкую к постоянной. Изменение задаваемой угловой скорости в этих регуляторах осуществляется подбором элементов электрической схемы.
[c.400]
Барабанные контроллеры типа КП и кулачковые контроллеры типа ПК для постоянного тока имеют симметричную схему включения, допускающую присоединение шунто-вого или сериесного тормозного электромагнита, и снабжены дополнительными пальцами для максимально-нулевой и конечной защиты вспомогательного тока. Применяемые преимущественно для управления сериесными двигателями в механизмах передвижения и поворота (вращения поворотной части грузоподъёмных машин), они используются также для управления шунтовыми и компаундными двигателями для механизмов подъёма груза они применяться не могут, за исключением случаев привода механизмов шунтовыми электродвигателями. [c.851]
На автомобилях с генераторами постоянного тока присоединение на массу обмотки дополнительного реле осуществляется через обмотку якоря генератора, что обеспечивает электрическую блокировку стартера, предупреждая ошибочное включение последнего на работающий двигатель (во время работы двигателя оба конца обмотки дополнительного реле находятся под одним и тем же напряжением). При этой схеме отказ в работе дополнительногог реле может быть вызван нарушением контакта в цепи якоря генератора, например вследствие заедания щетки в щеткодержателе. Проверка осуществляется непосредственным соединением вывода обмотки дополнительного реле с массой, минуя генератор.
[c.46]
При этой схеме отказ в работе дополнительногог реле может быть вызван нарушением контакта в цепи якоря генератора, например вследствие заедания щетки в щеткодержателе. Проверка осуществляется непосредственным соединением вывода обмотки дополнительного реле с массой, минуя генератор.
[c.46]
Управление двигателем постоянного тока Схема управления мотором
Сегодня научимся управлять обычным коллекторным мотором. Будем крутить его вправо и влево. И всё это без использования микроконтроллера Ардуино или ESP.
Для примера нам будет нужно всего 2 кнопки и два реле. Я использовал блок из двух реле, но можно и одинарные.
Для чего это может пригодиться.
Например.
Для управления жалюзи. Напишите, как ещё можно использовать это приспособление.
А если применить Ардуино, то управлять можно всего одной кнопкой.
Теперь посмотрим как это работает.
Так как я не нашёл мотор с маленькими оборотами, то пришлось поставить высокооборотистый, так что на записи не очень хорошо заметно направление движения.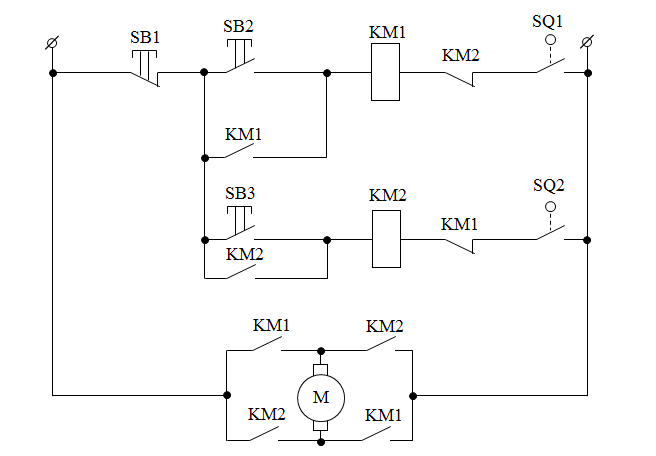 Я попытался замедлить скорость видео, но получилось ещё хуже. Так что поверьте на слово. Оно работает.
Я попытался замедлить скорость видео, но получилось ещё хуже. Так что поверьте на слово. Оно работает.
Принцип работы такой.
Двигатели постоянного тока вращаются в зависимости от полярности поданного напряжения.
Если поменять полярность, то изменится направление вращения.
Пока кнопка не нажата, мотор обесточен. При нажатии одной кнопки, на мотор подаётся напряжение которое вращает мотор в одну сторону, а при включении другого реле, напряжение изменит свою полярность и вращение будет в другую сторону. Дальше в видео я постараюсь графически показать как это работает.
Сначала теория.
Эти реле имеют три контакта и обозначаются как NO, COM, NC.
Это означает.
- NO — нормально-разомкнутый контакт
- COM — общий контакт
- NC — нормально-замкнутый контакт
В выключенном состоянии подвижный контакт COM замкнут с NC.
При подачи сигнала на управляющий контакт, подвижный контакт COM перекинется на NO и может включить мощную нагрузку, например лампу на 220 вольт или как в нашем случае электромотор.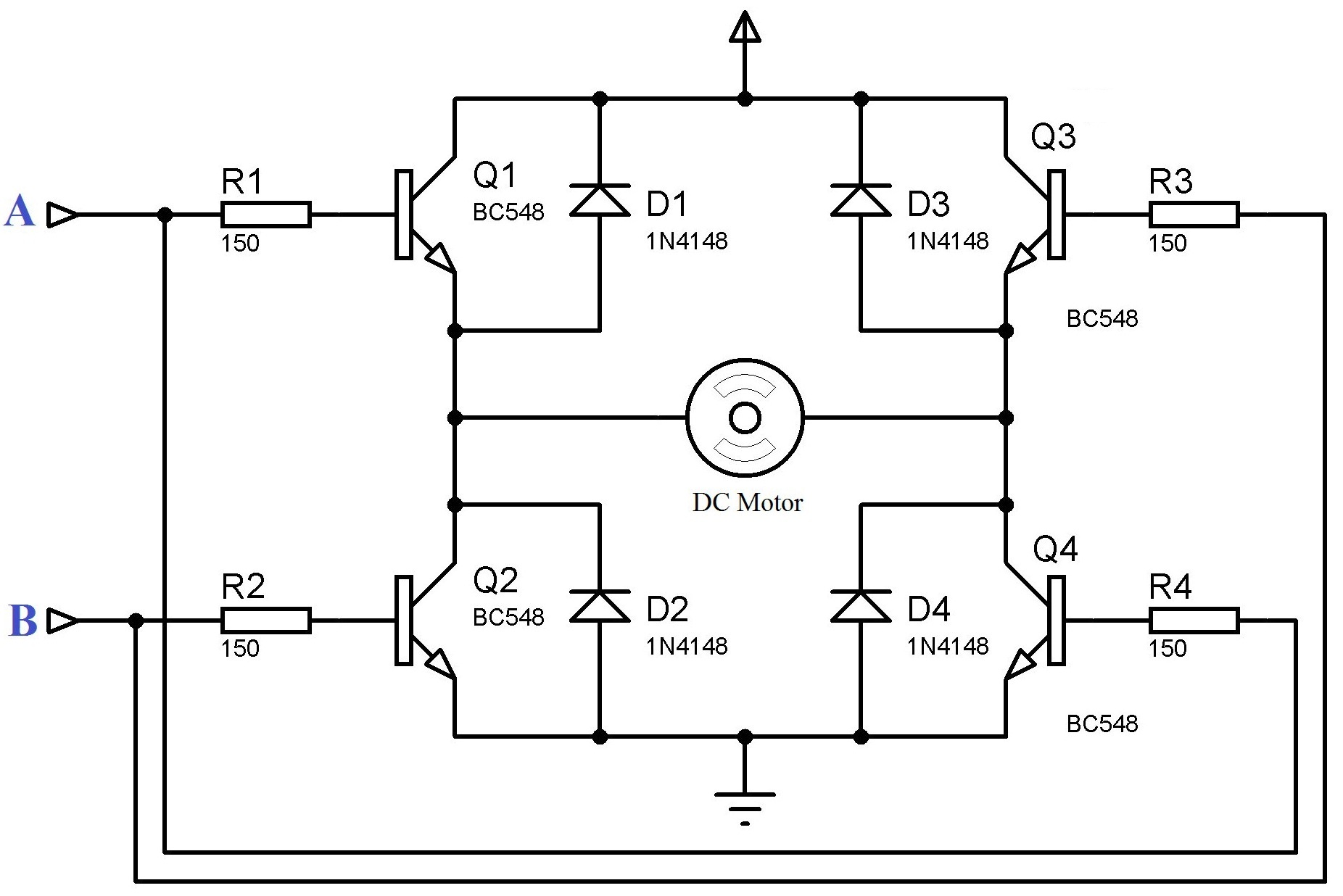
Реле могут управляться низким уровнем или высоким.
В 90% случаев такие реле управляются низким уровнем, то есть для включения реле надо на управляющий контакт подать минус питания. Это значит подключить к земле. Узнать о срабатывании можно по загоревшемуся светодиоду и по громкому щелчку реле. Кстати при работе с ESP вы могли заметить, что реле слабо щёлкает, а то и вообще не слышно. Это потому, что на ESP напряжение всего 3,3 вольта. Хотя для работы вот такого 5 вольтового реле нужно напряжение 5 вольт, но оно работает и с 3,3 вольта, но мене стабильно.
Если у вас реле работающее от высоко уровня, то всё наоборот. Вам для срабатывания надо подать на вход + питания, то есть + 5 вольт.
Ну думаю, что с теорией разобрались.
Теперь давайте рассмотрим схемы.
Сначала общая схема подключения.
Вот фотография как подключено у меня, а это схема общего подключения.
Теперь давайте посмотрим принцип работы.
- При выключенном первом и втором реле напряжение на мотор не подаётся.

- При включенном первом реле и выключенном втором, напряжение подаются вот по такой схеме, а так как ток движется от минуса к плюсу, то и вращение идёт в ту же сторону.
- При включенном втором реле и выключенном первом, напряжение теперь подаются вот по такой схеме. На моторе теперь плюс и минус поменяли свои значения и мотор будет крутиться в другую сторону.

Даже и не знаю что ещё сказать.
Пишите что не понятно. И извините если в теории я был не точен, всё же не занимался теорией, всё больше практика.
Но я постарался объяснить как можно проще, что бы было понятно большинству смотрящих.
Если вы хотите продолжения этой темы, например управление одной кнопкой, то пишите, и если будет много желающих, то я сделаю продолжение.
А вообще у меня есть ещё много интересных идей.
И по возможности досматривайте мои видео до конца, а то я стараюсь, рассказываю и описываю принцип работы и комментирую скетчи. На это уходит много времени и сил, но по статистики я вижу что вы эти моменты не смотрите, или прокручиваете, или уходите.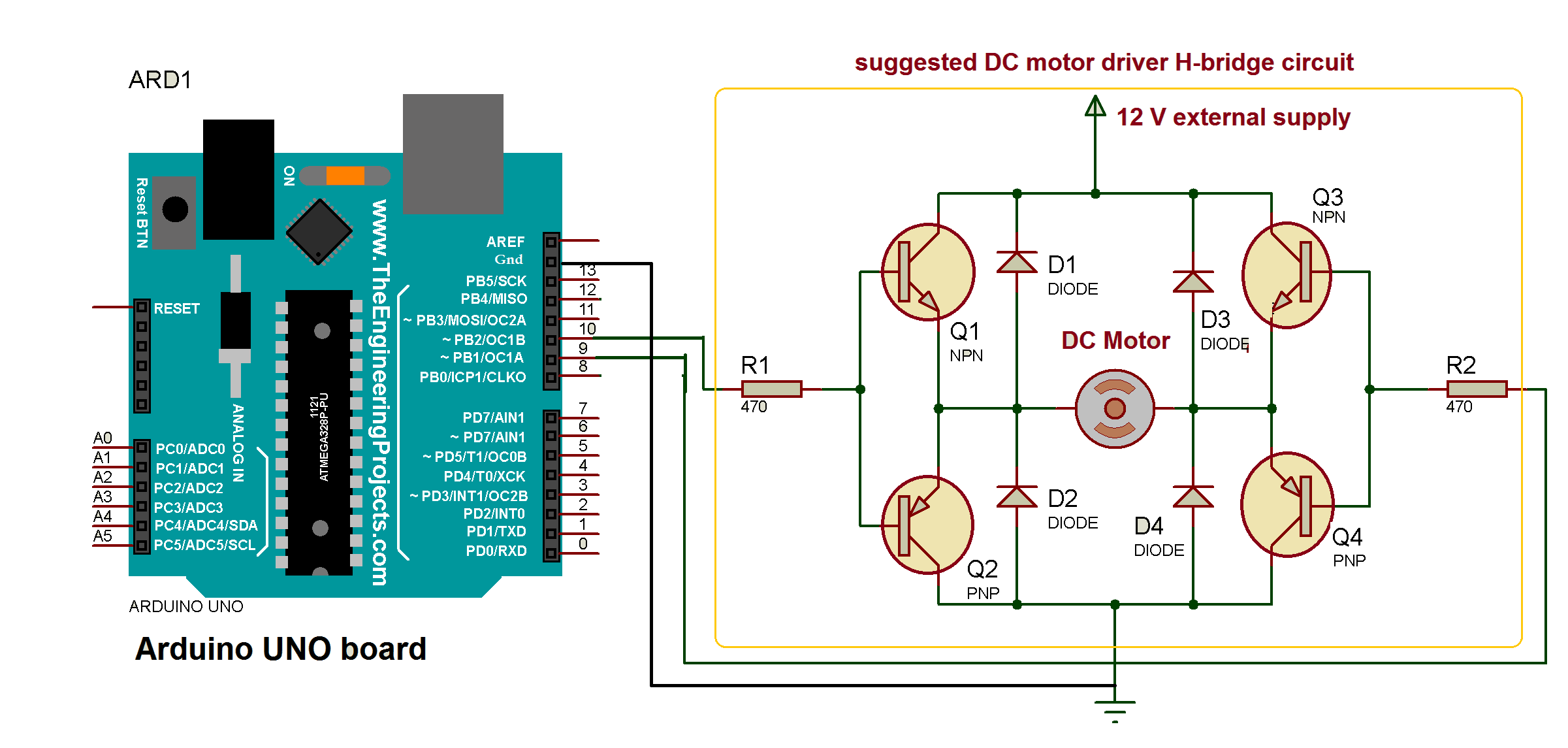 Из-за этого у видео плохое удержание, а это плохо сказывается на рейтинге.
Из-за этого у видео плохое удержание, а это плохо сказывается на рейтинге.
Если вам интересна эта тема, то я могу снять продолжение этого видео. Можно менять не только направление движения, но и изменять скорость вращения.
Объём вашего интереса, я буду оценивать по количеству лайков и комментариев. Чем их будет больше, тем быстрее выйдет новое видео.
Ну, а если вам нравятся мои уроки, то ставьте лайк и делитесь моими видео, с другими. Это очень поможет мне в продвижении канала, а меня будет стимулировать выпускать уроки чаще и интереснее.
Вы видите ссылки на видео, которые, я думаю будут вам интересны. Перейдя на любое из этих видео вы узнаете что-то новое, а ещё поможете мне. Ведь любой ваш просмотр — это знак YOUTUBE, что это кому-то интересно и что его надо показывать чаще.
Спасибо.
А пока на этом всё.
Схема включения двигателя постоянного тока в сеть 110 и 220вольт
Часто в условиях домашней мастерской, оснащенной различным оборудованием и механизмами, возникает необходимость подключения к сети двигателя постоянного тока.
Самой востребованной и популярной выступает схема с использованием пускового реостата. Этот элемент отвечает за понижение показателей пускового тока, возникающего при включении двигателя. Пусковой ток нуждается в корректировке, так как превышает номинальный показатель в 10-20р. Двигатель постоянного тока, а точнее обмотка может не справиться с такой нагрузкой.
На схеме ниже представлено подключение пускового реостата по последовательной схеме с цепью якоря.
Расшифровка обозначений:
- Л – соединенный с сетью зажим;
- М – соединенный с цепью возбуждения зажим-фиксатор;
- Я – соединенный с якорем зажим;
- 1 – дуга, 2 – рычаг, 3 – контакт рабочий.
Включение и управление двигателем постоянного тока важно выполнять, принимая во внимание информацию, приведенную на самом агрегате или в инструкции (если таковая еще сохранилась).
Представленная схема двигателя постоянного тока оптимальна для агрегатов, мощность которых превышает 0,5кВт. Чтобы рассчитать пусковое сопротивление реостата, воспользуйтесь формулой:
Чтобы рассчитать пусковое сопротивление реостата, воспользуйтесь формулой:
Расшифровка обозначений: Rn – пусковое сопротивление реостата, U – напряжение сети (100 или 220), Iном – номинальное значение тока электрического двигателя, Rя – показатели сопротивления обмотки якоря.
Порядок и схема включения двигателя постоянного тока
- Установите рычаг на реостате в положение «0» — холостой контакт;
- После включения сетевого рубильника необходимо перевести этот рычаг в положение первого промежуточного контакта. Подключаемый двигатель постоянного тока перейдет в стадию возбуждения. По якорной цепи потечет ток, показатель которого зависит от величины сопротивления, включающего все 4 секции пускового реостата;
- Посредством увеличения частоты вращения якоря пусковой ток снижается. В результате уменьшается и сопротивление, возникшее при пуске. Для выполнения задачи рычаг реостата постепенно проводят по контактам до тех пор, пока он не займет рабочего контакта. НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.
 НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.
НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.Схема двигателя постоянного тока предполагает и определенную последовательность действий для его отключения.
Двигатель постоянного тока отключается не сразу. После перевода рукояти реостата в крайнее левое положение агрегат отключится, но обмотка останется замкнутой. Только после этого питание двигателя можно выключать.
Если игнорировать приведенный выше порядок действий, при размыкании цепи велик риск возникновения напряжения такой силы, которая выведет электрический двигатель из строя.
Включение двигателя постоянного тока для промышленных применений может отличаться.
Управление двигателем постоянного тока | joyta.ru
Чтобы двигатель постоянного тока начал вращаться, ему необходимо обеспечить нужное количество энергии. Как правило, для маломощных двигателей достаточно несколько ватт. Блок управления (микроконтроллер), который принимает решения о запуске двигателя, не может непосредственно управлять двигателем, то есть обеспечить необходимую мощность со своего вывода. Это связано с тем, что порты микроконтроллера имеют очень ограниченную нагрузочную способность (максимальный ток на выходе микроконтроллера обычно не более 20 мА).
Это связано с тем, что порты микроконтроллера имеют очень ограниченную нагрузочную способность (максимальный ток на выходе микроконтроллера обычно не более 20 мА).
Поэтому нужен усилитель мощности — устройство, которое может на своем выходе генерировать сигнал мощностью большей, чем мощность на его входе. Такими устройствами являются транзистор и реле, которые прекрасно подходят для управления двигателем постоянного тока.
Управление двигателем при помощи биполярного транзистора
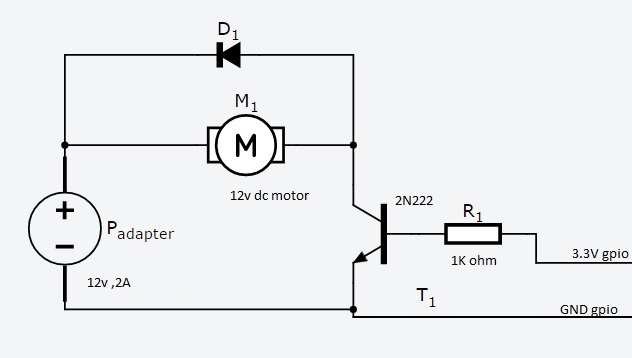
Самый простой способ приведения в действие двигателя показан ниже:
Биполярный транзистор используется в качестве переключателя. Резистор R необходимо подобрать таким, чтобы в худшем случае (потенциал базы равен потенциалу эмиттера) через него протекал ток, не превышающий максимальный ток порта микроконтроллера.
Для того чтобы подобрать подходящий транзистор, нам нужно знать максимальный ток во время пуска или остановки двигателя, и ток во время нормальной его работы. Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Следует также обратить внимание на мощность, выделяющуюся на транзисторе (P = Uкэ * Iк). Несмотря на то, что транзистор в данном случае работает в состоянии насыщения и напряжение Uкэ часто не превышает 1В, коллекторный ток все же велик (около 0,5 А для двигателя среднего размера) и, следовательно, мощность, излучаемая на транзисторе может потребовать от нас установки радиатора.
Другой проблемой при применении биполярных транзисторов, может быть, слишком большой ток базы. Соотношение токов выходного сигнала к входному такого транзистора — это чаще всего 100 (это отношение называется коэффициентом усиления по току и обозначается или hfe ). Но, к сожалению, когда транзистор работает в состоянии насыщения, этот коэффициент сильно снижается.
Это приводит к тому, что если мы хотим, чтобы ток коллектора имел большое значение, это может потребовать большего тока, чем 20 мА, то есть больше, чем составляет нагрузочная способность порта микроконтроллера. В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:
В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:
Силиконовый коврик для пайки
Размер 55 х 38 см, вес 800 гр….
Такая система ведет себя как один транзистор с большим значением усиления тока и малой скоростью работы.
Несколько слов об индуктивных нагрузках
Поскольку двигатель является индуктивной нагрузкой, мы должны быть осторожны. Если через обмотку течет ток, и мы внезапно остановим этот поток, то на выводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (в представленной схеме выше) вызывая пробой перехода база-коллектор. Кроме того, это может создавать значительные помехи. Для предотвращения этого необходимо параллельно с индуктивной нагрузкой подключить диод:
Во время нормальной работы двигателя диод смещен в обратном направлении. Отключение питания электродвигателя вызывает нарастание напряжения на катушке, при этом диод будет смещен в прямом направлении, благодаря чему произойдет разряд излишней энергии накопленной в катушке.
Диод следует подобрать такой, чтобы он выдерживал обратное напряжение во время нормальной работы двигателя. Такую защиту можно применять как при использовании биполярных транзисторов, так и MOSFET. Так же рекомендуется использовать диод и в работе с электромагнитным реле, для предотвращения раннего износа контактов.
Управление двигателем при помощи MOSFET транзистора
Так же можно управлять постоянным двигателем с помощью полевого транзистора MOSFET:
Он должен быть с каналом обогащенного типа. Основным преимуществом такого транзистора является практически отсутствие входного тока. Он имеет небольшое активное сопротивление канала (доли ома), благодаря чему потери мощности в транзисторе не большие. Недостатком является чувствительность к электростатическим разрядам, которые могут вывести транзистор из строя.
Так как ток стока может достигать (для среднего транзистора) десятков ампер и, имея практически нулевой входной ток, MOSFET транзисторы отлично подходят в качестве усилителя мощности и часто являются лучшей альтернативой, чем биполярные. Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Управление двигателем при помощи реле
Если вам необходимо управление двигателем постоянного тока, и вы знаете, что частота переключения не будет слишком большая (ниже 20 Гц), то вы можете для коммутации использовать реле (реле не подходят для управления ШИМ). Преимуществом такого решения является, прежде всего, малое выделение тепла.
Существуют малогабаритные реле способные управлять токами до 10 А ! Для таких больших токов, потери мощности в реле являются приемлемыми, но для небольших токов хуже. Катушка управления контактами реле можно работать даже от нескольких сотен мА. Так что нет никакого смысла в использовании такого реле для управления током подобной величины. К счастью, есть отдельные экземпляры, которые потребляют ток около 40 мА и это уже гораздо лучше.
Если речь идет о напряжении управления реле, то оно бывает от 3 до 24 В. Как мы уже писали ранее, максимальный выходной ток микроконтроллера 20 мА, а это слишком мало, чтобы управлять реле напрямую. Поэтому для управления необходимо использовать транзистор. Схема такого подключения, как правило, выглядит следующим образом:
Как мы уже писали ранее, максимальный выходной ток микроконтроллера 20 мА, а это слишком мало, чтобы управлять реле напрямую. Поэтому для управления необходимо использовать транзистор. Схема такого подключения, как правило, выглядит следующим образом:
Так и так, нам нужен транзистор. Следует, отметить, что в данном случае выделяется гораздо меньше тепла, чем на схеме, основанной только на транзисторе, так как через транзисторный ключ в этой системе течет небольшой ток, а само реле почти не рассеивает энергию в выходной цепи.
Защитный диод на реле не является обязательным. Его наличие зависит от силы тока, индуктивности катушки и максимального напряжения Uкэ транзистора. А вот наличие диода в выходной цепи больше зависит от того, хотим ли мы продлить срок службы контактов реле.
В конце рассуждений о реле приведем ситуацию, когда данный вид управления двигателем является оптимальным. Предположим, что мы хотим управлять двигателем, у которого номинальное рабочее напряжение 2,5 В и ток 3А и работает он от источника напряжением 2,5 В (переключение с небольшой частотой). Если вы будете использовать усилитель, построенный на транзисторе, то на выходе мы будем иметь падение напряжения около 1 В, что в данном случае является слишком большим значением. При использовании же реле у нас никакого падения напряжения не будет.
Если вы будете использовать усилитель, построенный на транзисторе, то на выходе мы будем иметь падение напряжения около 1 В, что в данном случае является слишком большим значением. При использовании же реле у нас никакого падения напряжения не будет.
Управление двигателем при помощи H-моста
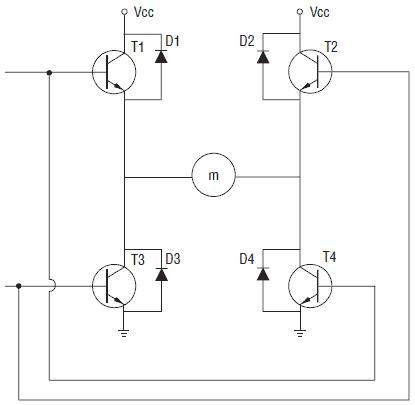
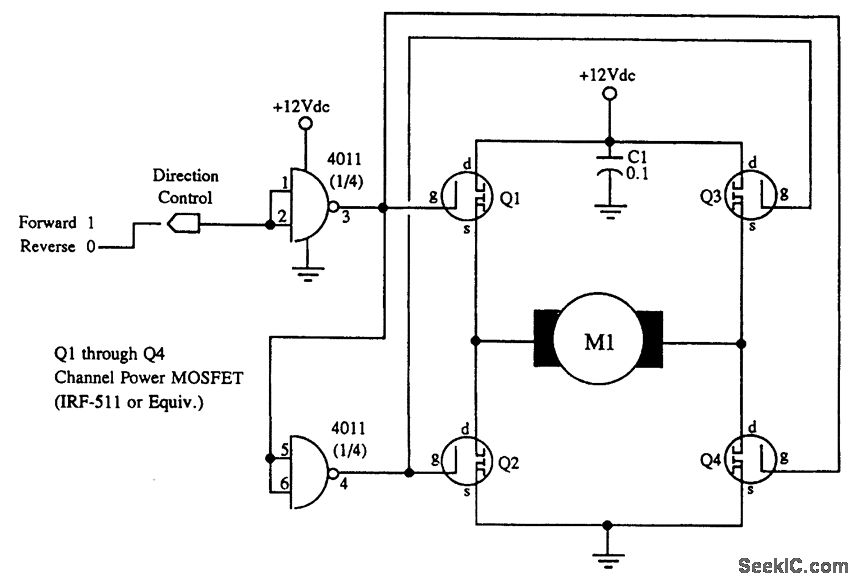
Решения, которые мы привели до этого, имеют основной недостаток — с их помощью не возможно управлять двигателем в двух направлениях! Такая необходимость, скорее всего, нам пригодиться, например, при строительстве роботов. H-моста — это конструкция, которая может быть построена как из обоих типов транзисторов, как и с реле.
Буква «H» исходит из того, что четыре реле и двигатель в середине образуют на схеме букву «H».
Подробно о том, как работает H-мост можно почитать здесь
Управление шаговым двигателем
Шаговые двигатели, так же как и коллекторные, состоят в основном из катушек. То есть для вращения нужно пропустить ток через катушки. Таким образом, все из представленных схем управления двигателями могут быть использованы и для управления шаговым двигателем.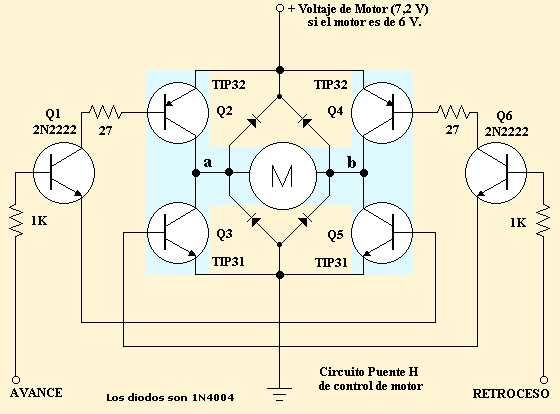 (все, кроме H-моста)
(все, кроме H-моста)
Разница в схеме усилителя мощности для шаговых двигателей заключается в том, что здесь немного другие напряжения и токи, и также в основном требуется 4 переключателя на один двигатель (когда двигатель имеет пять контактов).
Номинальное рабочее напряжение, в основном, находится в диапазоне 9 — 24 В. При таких не малых напряжениях мы имеем дело также с большим током: 0,3 — 1A на одну фазу! Ниже приведен пример подключения шагового двигателя с 5 выводами:
В роли ключей мы можем также использовать MOSFET — транзисторы. Это даже более простое решение.
Так как нам нужно до 4-х транзисторов, которые занимают довольно много места на плате, хорошим решением будет использовать микросхему ULN2003A.
РАЗРАБОТКА СИЛОВОГО МОДУЛЯ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА НА ОСНОВЕ СХЕМЫ H-МОСТ | Опубликовать статью ВАК, elibrary (НЭБ)
Черных А.А.
Студент, НИ Томский политехнический университет
РАЗРАБОТКА СИЛОВОГО МОДУЛЯ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА НА ОСНОВЕ СХЕМЫ H-МОСТ
Аннотация
В данной работе будет описан расчет и сборка усилителя на основе биполярных транзисторов. Подбор элементной базы, которая соответствовала нагрузке, и обеспечивалась стабильная работа. Тестирование данного силового модуля под управлением МК Atmega16.
Подбор элементной базы, которая соответствовала нагрузке, и обеспечивалась стабильная работа. Тестирование данного силового модуля под управлением МК Atmega16.
Ключевые слова: транзистор, эмиттер, база, коллектор, оптопара, гальваническая развязка, двигатель, микроконтроллер.
Chernykh A.A.
Student, Tomsk Polytechnic University
DEVELOPMENT OF DC-MOTOR CONTROL MODULE, BASED ON H-BRIDGE SCHEME
Abstract
This article describes the calculation and assembly of the amplifier based on bipolar transistors. Selection of new elements, which correspond to the load, and ensures stable operation. Testing of the power module running controlled by Atmega16 microcontroller.
Keywords: emitter, base, collector, opto-galvanic isolation, motor, microcontroller.
Введение
Усилитель является одним из основных узлов различной аппаратуры в устройствах автоматики, телемеханики, вычислительной и информационно-измерительной техники. Электронный усилитель – это устройство, преобразующее маломощный электрический сигнал на входе в сигнал большой мощности на выходе с минимальными искажениями формы. Усиление мощности сигнала осуществляется за счет потребления усилителем энергии от источника питания.
Электронный усилитель – это устройство, преобразующее маломощный электрический сигнал на входе в сигнал большой мощности на выходе с минимальными искажениями формы. Усиление мощности сигнала осуществляется за счет потребления усилителем энергии от источника питания.
Выбор структуры усилителя
Так как требуемый коэффициент усиления достигает нескольких сотен, то целесообразно составлять усилитель из нескольких простейших усилителей. Такие простейшие усилители называются усилительными каскадами.
Принцип работы и расчет силового модуля
Как правило, управление двигателем постоянного тока осуществляется изменением напряжения, подаваемого на концы обмотки якоря. Для реверсирования двигателя необходимо менять полярность этого напряжения. Для этого используется мостовая схема: Н-мост (драйверы двигателей), состоящая из четырех силовых ключей (в некоторых случаях 2х управляющих дополнительно) и управляющих элементов. Управляющий сигнал, подаваемый на силовую часть схемы, генерируется с помощью микроконтроллера. Для изменения напряжения (аналогового сигнала) используется широтно-импульсная модуляция (ШИМ). Микроконтроллер генерирует ШИМ–сигнал с определенным коэффициентом заполнения (см. рис. 1).
Для изменения напряжения (аналогового сигнала) используется широтно-импульсная модуляция (ШИМ). Микроконтроллер генерирует ШИМ–сигнал с определенным коэффициентом заполнения (см. рис. 1).
Коэффициент заполнения определяет среднее значение напряжения, которое может составлять от 0 до 5В на выводе микроконтроллера, что соответствует 0..7,2В, подаваемым на обмотку якоря двигателя, а также необходимый ток, так как микроконтроллер подает очень маленький ток. На графике показаны сигналы с коэффициентом заполнения 0,25 и 4.
Рис. 1 – ШИМ-сигнал
Пунктирная линия соответствует средним значениям напряжения – 1В и 4В соответственно. Коэффициент заполнения устанавливается с помощью установки значения регистра в AVR микроконтроллере ATmega16 – OCR1AL (для 8-битного ШИМ, который используется для управления двигателем). Это позволяет установить 256 различных скоростей вращения электродвигателя. Значению OCR1AL = 0 соответствует среднее напряжение на выводе OC1A 0В, значению OCR1AL = 255 соответствует напряжение 5В. Частота ШИМ–сигнала составляет 4 000 000 / 256 = 15 625 Гц.
Частота ШИМ–сигнала составляет 4 000 000 / 256 = 15 625 Гц.
Силовая часть мостовой схемы приведена на рисунке 2. Она состоит из четырех силовых транзисторов, двух управляющих транзисторов, резисторов, ограничивающих базовые токи, шунтирующих диодов и гальванической развязки в виде двух оптопар. Питание Н-моста происходит от блока питания, подающего постоянное напряжение +7,2В относительно земли.
Рассчитываем параметры для маломощного ДПТ, потребляемого ток до 1А и напряжением 7,2В.
Максимальный коллекторный ток на силовых транзисторах (при пуске двигателя) составляет 2 А. Чтобы обеспечить переход транзисторов в режим насыщения, базовый ток должен быть не меньше:
С учетом падения на переходах база-эмиттер напряжения 0,7В и разности потенциалов между коллектором и эмиттером управляющих транзисторов 1В, максимальные сопротивления в базовых цепях составят:
Рис. 2 – Электрическая принципиальная схема силового модуля
Были выбраны сопротивления R1= R2 = 70 Ом. Таким образом, базовый ток составил:
Таким образом, базовый ток составил:
Следовательно, максимально возможное сопротивление:
Для схемы берем сопротивления номиналом 1кОм.
Мощность, рассеивающаяся на сопротивлениях, составит:
Рис. 3 – Силовой модуль для ДПТ на биполярных транзисторах
Заключение
Был спаян упрощенный вариант схемы на четырех транзисторах без гальванической развязки (Рис.3) и протестирован на МК. Также подобраны транзисторы с запасом мощности согласно схеме, как показано на рисунке 2, для широкой применяемости модуля.
Литература
- Datasheet на микроконтроллер ATmega16.
- Биполярный транзистор, расчёт транзисторного каскада [Электронный ресурс]. URL: http://www.meanders.ru/tranzistors.shtml Режим доступа: свободный (дата обращения: 07.01.2015)
- ALL Transistor datasheet [Электронный ресурс]. URL: http://alltransistors.com/ Режим доступа: свободный (дата обращения: 09. 01.2015)
 01.2015)
01.2015)References
- Datasheet na mikrokontroller ATmega16.
- Bipoljarnyj tranzistor, raschjot tranzistornogo kaskada [Jelektronnyj resurs]. URL: http://www.meanders.ru/tranzistors.shtml Rezhim dostupa: svobodnyj (data obrashhenija: 07.01.2015)
- ALL Transistor datasheet [Jelektronnyj resurs]. URL: http://alltransistors.com/ Rezhim dostupa: svobodnyj (data obrashhenija: 09.01.2015)
3 Объяснение простых схем контроллера скорости двигателя постоянного тока
Схема, которая позволяет пользователю линейно управлять скоростью подключенного двигателя путем вращения присоединенного потенциометра, называется схемой контроллера скорости двигателя.
Здесь представлены 3 простых в сборке схемы регулятора скорости для двигателей постоянного тока: одна с использованием полевого МОП-транзистора IRF540, вторая с использованием IC 555 и третья концепция с IC 556 с обработкой крутящего момента.
Дизайн № 1: Контроллер скорости двигателя постоянного тока на основе Mosfet
Очень крутая и простая схема контроллера скорости двигателя постоянного тока может быть построена с использованием всего одного МОП-транзистора, резистора и потенциометра, как показано ниже:
Использование Эмиттерный повторитель BJT
Как видно, mosfet настроен как повторитель источника или общий режим стока, чтобы узнать больше об этой конфигурации, вы можете обратиться к этому сообщению, в котором обсуждается версия BJT, тем не менее принцип работы остается тем же .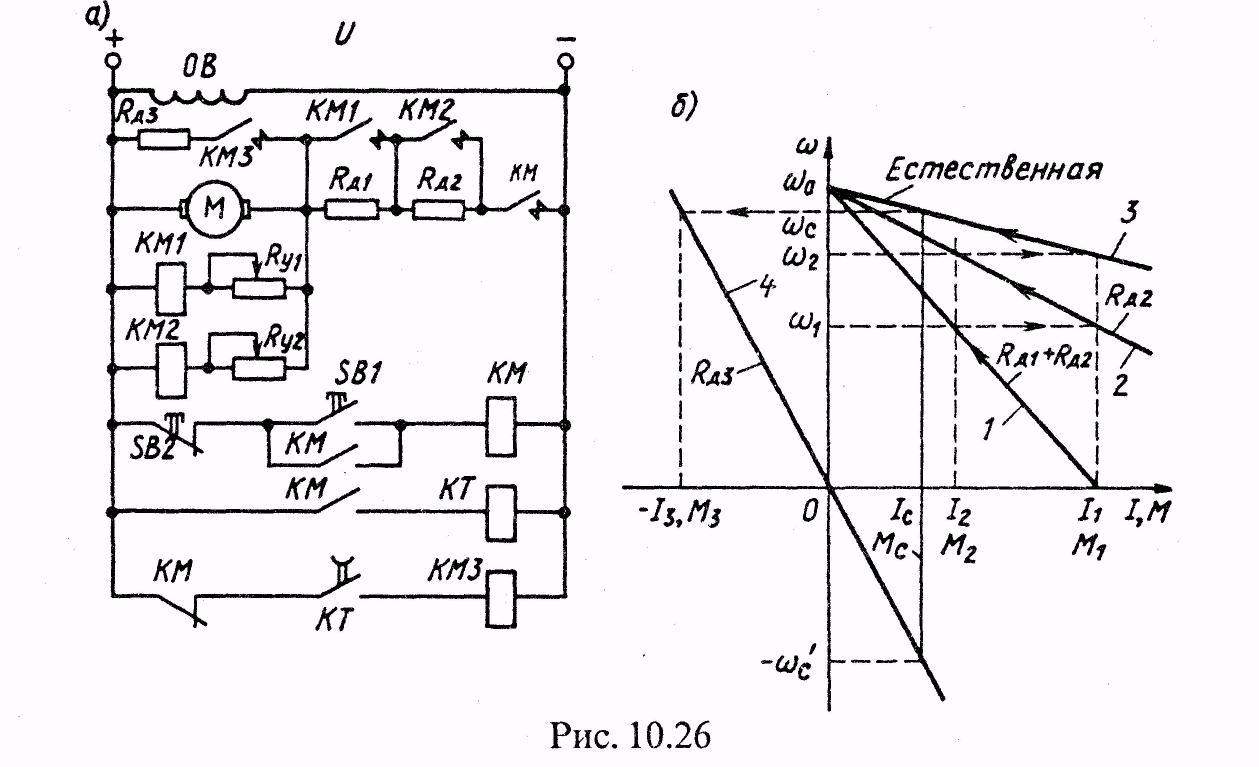
В приведенной выше конструкции контроллера двигателя постоянного тока регулировка потенциометра создает изменяющуюся разность потенциалов на затворе МОП-транзистора, а вывод истока МОП-транзистора просто следует за значением этой разности потенциалов и соответственно регулирует напряжение на двигателе.
Это означает, что источник всегда будет на 4 или 5 В отстать от напряжения затвора и будет меняться вверх / вниз с этой разницей, представляя переменное напряжение на двигателе от 2 до 7 В.
Когда напряжение затвора составляет около 7 В, вывод источника будет подавать минимум 2 В на двигатель, вызывая очень медленное вращение двигателя, и 7 В будет доступно на выводе источника, когда регулировка потенциометра генерирует полное напряжение 12 В на затворе. МОП-транзистора.
Здесь мы можем ясно видеть, что вывод истока МОП-транзистора, кажется, «следует» за затвором и, следовательно, за повторителем источника имени.
Это происходит потому, что разница между затвором и истоком МОП-транзистора всегда должна быть около 5В, чтобы МОП-транзистор работал оптимально.
В любом случае, вышеуказанная конфигурация помогает обеспечить плавное регулирование скорости двигателя, и конструкция может быть построена довольно дешево.
BJT может также использоваться вместо MOSFET, и фактически BJT будет обеспечивать более высокий диапазон регулирования от 1 В до 12 В на двигателе.
Видео-демонстрация
Когда дело доходит до управления скоростью двигателя равномерно и эффективно, контроллер на основе ШИМ становится идеальным вариантом, здесь мы узнаем больше о простой схеме для реализации этой операции.
Использование полевого МОП-транзистора в качестве потенциометра высокой мощности
На следующем рисунке ниже показана очень простая схема контроллера скорости двигателя постоянного тока, в которой полевой МОП-транзистор используется в качестве мощного потенциометра (реостата).Схема предназначена для работы с двигателями постоянного тока на 12 В, имеющими пиковый ток ниже 5 А.
Питание переменного тока от сети подается через двухпозиционный переключатель S1 на первичную обмотку развязывающего и понижающего трансформатора T1. Двухтактная схема выпрямителя D1 и D2 двухполупериодного выпрямления на выходе T1, и результирующий нефильтрованный выход постоянного тока сглаживается до определенной степени с помощью C1, чтобы создать относительно постоянный потенциал постоянного тока.
На этом выходе постоянного тока может быть значительный уровень пульсаций, однако в данном приложении это неважно.Tr1 обеспечивает питание нагрузки и смещается через резистивный делитель, состоящий из R1, VR1 и R2.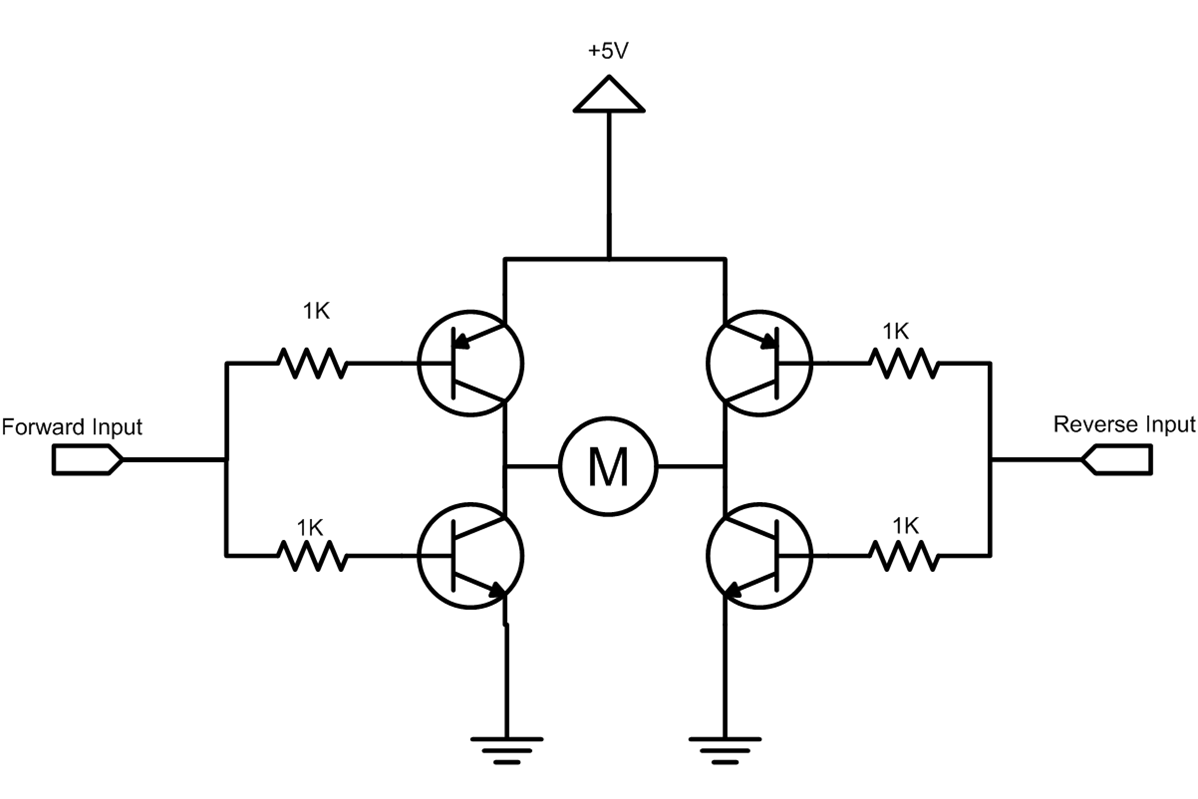
Напряжение смещения затвора, подаваемое на Tr1, может быть недостаточным, чтобы позволить полевому МОП-транзистору вести себя значимо со скребком VR1 на конце его вращения R2, и двигатель не будет работать. Перемещение грязесъемника VR1 к противоположному концу его вращения позволяет постоянно увеличивать смещение, подаваемое на Tr1, что приводит к неуклонно уменьшающемуся сопротивлению стока к истоку.
Из-за этого мощность, подаваемая на двигатель, увеличивается вместе со скоростью двигателя, пока Tr1 не достигнет насыщения (когда двигатель работает на полной скорости). Таким образом, VR1 можно использовать для изменения скорости двигателя с минимальной на максимальную.
C2 отфильтровывает любые сетевые гудки или другие электрические шумы, которые в противном случае могли бы быть уловлены высокоомной схемой затвора Tr1, предотвращая снижение скорости двигателя до нуля. D3 — это защитный диод, который предотвращает любые чрезмерные всплески обратного напряжения, которые могут возникнуть в результате чрезмерно индуктивной нагрузки двигателя.
Конструкция № 2: ШИМ-управление двигателем постоянного тока с помощью IC 555
Конструкцию простого контроллера скорости двигателя, использующего ШИМ, можно понять следующим образом:
Первоначально, когда схема запитана, контакт триггера находится в низком логическом положении, поскольку конденсатор С1 не заряжен.
Вышеупомянутые условия инициируют цикл колебаний, переводя выходной сигнал на высокий логический уровень.
Из-за высокого выходного сигнала конденсатор теперь заряжается через D2.
При достижении уровня напряжения, равного 2/3 напряжения питания, вывод 6, который является порогом срабатывания триггера IC.
Момент срабатывает на контакте №6, на контакте №3 и контакте №7 устанавливается низкий логический уровень.
При низком уровне на выводе №3 C1 снова начинает разряжаться через D1, и когда напряжение на C1 падает ниже уровня, составляющего 1/3 напряжения питания, выводы №3 и №7 снова становятся высокими, вызывая цикл. следовать и повторять.
Интересно отметить, что C1 имеет два дискретно установленных пути для процесса зарядки и разрядки через диоды D1, D2 и через резистивные плечи, устанавливаемые потенциометром, соответственно.
Это означает, что сумма сопротивлений, с которыми сталкивается C1 во время зарядки и разрядки, остается неизменной независимо от того, как установлен потенциометр, поэтому длина волны выходного импульса всегда остается неизменной.
Однако, поскольку периоды времени зарядки или разрядки зависят от значения сопротивления, встречающегося на их пути, горшок дискретно устанавливает эти периоды времени в соответствии с его настройками.
Поскольку периоды времени заряда и разряда напрямую связаны с рабочим циклом выхода, они меняются в зависимости от настройки потенциометра, давая форму предполагаемым изменяющимся импульсам ШИМ на выходе.
Средний результат отношения метка / пространство дает выход ШИМ, который, в свою очередь, управляет скоростью двигателя постоянного тока.
Импульсы ШИМ подаются на затвор МОП-транзистора, который реагирует и регулирует ток подключенного двигателя в ответ на настройку потенциометра.
Уровень тока двигателя определяет его скорость и, таким образом, реализует управляющий эффект через потенциометр.
Частоту на выходе ИС можно рассчитать по формуле:
F = 1.44 (VR1 * C1)
МОП-транзистор может быть выбран в соответствии с требованиями или током нагрузки.
Принципиальная схема предлагаемого регулятора скорости двигателя постоянного тока представлена ниже:
Прототип:
Тестирование видео:
 youtube.com/embed/M-F7MWcSiFY?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/M-F7MWcSiFY?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
В приведенном выше видеоролике мы можем увидеть, как IC 555 основан на конструкция используется для управления скоростью двигателя постоянного тока. Как вы можете видеть, хотя лампочка отлично реагирует на ШИМ и меняет свою интенсивность от минимального свечения до максимально слабого, двигатель этого не делает.
Двигатель изначально не реагирует на узкие ШИМ, а запускается рывком после того, как ШИМ настроены на значительно более высокие значения длительности импульса.
Это не означает, что в цепи есть проблемы, это потому, что якорь двигателя постоянного тока плотно зажат между парой магнитов. Чтобы инициировать запуск, якорь должен совершить скачок своего вращения через два полюса магнита, что не может произойти при медленном и плавном движении. Он должен начинаться с укола.
Именно поэтому двигатель изначально требует более высоких настроек ШИМ, и как только начинается вращение, якорь получает некоторую кинетическую энергию, и теперь достижение более низкой скорости становится возможным с помощью более узких ШИМ.
Тем не менее, перевод в состояние «еле-еле медленно» может оказаться невозможным по той же причине, что описана выше.
Я изо всех сил старался улучшить отклик и добиться максимально медленного ШИМ-управления, сделав несколько модификаций на первой диаграмме, как показано ниже:
Сказав это, двигатель мог бы показать лучшее управление на более медленных уровнях, если бы двигатель прикреплен или обвязан грузом через шестерни или систему шкивов.
Это может произойти из-за того, что нагрузка действует как демпфер и помогает обеспечить контролируемое движение во время регулировки более низкой скорости.
Дизайн № 3: Использование IC 556 для расширенного управления скоростью
Изменение скорости двигателя постоянного тока может показаться не таким сложным, и вы можете найти множество схем для этого.
Однако эти схемы не гарантируют постоянных уровней крутящего момента при более низких скоростях двигателя, что делает их работу весьма неэффективной.
Более того, на очень низких скоростях из-за недостаточного крутящего момента двигатель имеет тенденцию останавливаться.
Еще одним серьезным недостатком является то, что в этих схемах нет функции реверсирования двигателя.
Предлагаемая схема полностью лишена вышеуказанных недостатков и способна создавать и поддерживать высокие уровни крутящего момента даже при минимально возможных скоростях.
Работа схемы
Прежде чем обсуждать предложенную схему контроллера двигателя с ШИМ, мы также хотели бы изучить более простую альтернативу, которая не так эффективна. Тем не менее, его можно считать достаточно хорошим, если нагрузка на двигатель невелика, и пока скорость не снижена до минимального уровня.
На рисунке показано, как можно использовать одну микросхему 556 IC для управления скоростью подключенного двигателя, мы не будем вдаваться в подробности, единственным заметным недостатком этой конфигурации является то, что крутящий момент прямо пропорционален скорости двигателя.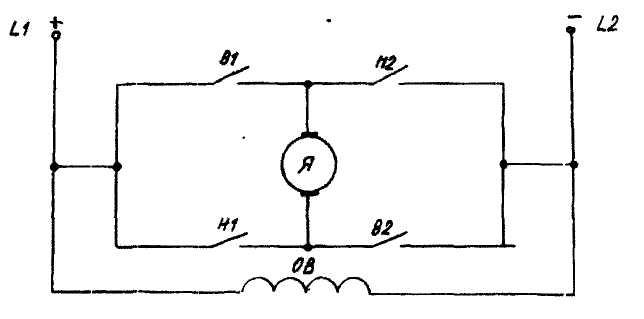 .
.
Возвращаясь к предлагаемой конструкции схемы контроллера скорости с высоким крутящим моментом, здесь мы использовали две микросхемы 555 вместо одной или, скорее, одну микросхему 556, которая содержит две микросхемы 555 в одном корпусе.
Принципиальная схема
Основные характеристики
Вкратце предлагаемый контроллер двигателя постоянного тока включает следующие интересные особенности:
Скорость можно плавно изменять от нуля до максимума, без остановки.
На крутящий момент никогда не влияют уровни скорости и он остается постоянным даже при минимальных уровнях скорости.
Вращение двигателя можно изменить или изменить за доли секунды.
Скорость регулируется в обоих направлениях вращения двигателя.
Двум микросхемам 555 назначены две отдельные функции. Одна секция сконфигурирована как нестабильный мультивибратор, генерирующий такты прямоугольной волны 100 Гц, которые подаются на предыдущую секцию 555 внутри корпуса.
Вышеупомянутая частота отвечает за определение частоты ШИМ.
Транзистор BC 557 используется в качестве источника постоянного тока, который поддерживает заряженным соседний конденсатор на его плече коллектора.
При этом на вышеуказанном конденсаторе создается пилообразное напряжение, которое сравнивается внутри микросхемы 556 IC с напряжением образца, приложенным извне по показанной схеме контактов.
Напряжение выборки, прикладываемое извне, может быть получено с помощью простой схемы источника питания с переменным напряжением 0–12 В.
Это изменяющееся напряжение, подаваемое на микросхему 556 IC, используется для изменения ШИМ импульсов на выходе и, в конечном итоге, используется для регулирования скорости подключенного двигателя.
Переключатель S1 используется для мгновенного изменения направления вращения двигателя, когда это необходимо.
Список деталей
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 Ом,
- R7, R8, R9, R10 = 470 Ом,
- C1 = 0,1 мкФ,
- C2, C3 = 0,01 мкФ,
- C4 = 1 мкФ / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC5472, D 9017 — D4 = 1N5408,
- Z1 = 4V7 400 мВт
- IC1 = 556,
- S1 = тумблер SPDT
Приведенная выше схема была вдохновлена следующей схемой драйвера двигателя, которая была опубликована давно в журнале Elecktor Electronic India.
Управление крутящим моментом двигателя с помощью IC 555
Первую схему управления двигателем можно значительно упростить, используя переключатель DPDT для реверсирования двигателя и транзистор эмиттерного повторителя для реализации управления скоростью, как показано ниже:
Улучшено Крутящий момент на низкой скорости с использованием CMOS PWM Control
Хотя схемы регуляторов скорости линейного двигателя с одним MOSFET, описанные в начале статьи, включают преимущество простоты, но они могут иметь несколько недостатков.Один из них заключается в том, что в полевом МОП-транзисторе существует значительный уровень рассеивания, особенно когда двигатель настроен примерно на 50 процентов от оптимальной скорости. Однако это может быть, конечно, не серьезной проблемой, и просто требуется установка радиатора умеренно большого размера на полевой МОП-транзистор.
Гораздо более серьезное беспокойство вызывает то, что двигатель может заглохнуть, как только этот тип линейного регулятора настроен на более низкие скорости.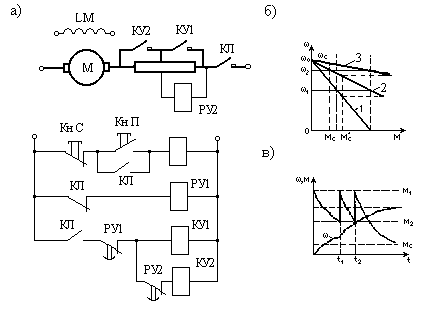 Это связано с тем, что полевой МОП-транзистор в этой ситуации имеет относительно высокое сопротивление, что обеспечивает вход питания со значительно высоким выходным сопротивлением.
Это связано с тем, что полевой МОП-транзистор в этой ситуации имеет относительно высокое сопротивление, что обеспечивает вход питания со значительно высоким выходным сопротивлением.
Когда нагрузка на двигатель увеличивается, он пытается потреблять чрезмерное количество тока питания, но это приводит к большему падению напряжения на транзисторе и более низкому напряжению питания на двигателе. В результате мощность, подаваемая на двигатель, существенно не меняется, а скорее уменьшается. Из-за этого у мотора есть склонность к заглоханию. Кроме того, существует обратная реакция, при которой снижение нагрузки на двигатель сокращает потребление тока, что приводит к увеличению напряжения питания и значительному увеличению скорости двигателя.
Используя контроллер, который подает импульсный сигнал ШИМ на двигатель, вы можете добиться гораздо лучшего управления скоростью двигателя.
Улучшенный крутящий момент с использованием управления скоростью CMOS PWM
Один из способов реализации этого, и тот, который используется здесь, состоит в том, чтобы иметь схему, которая обеспечивает фиксированную длительность выходного импульса при изменении частоты импульсов для изменения скорости двигателя. Низкая частота создает большие промежутки между импульсами и подает на двигатель относительно небольшую мощность.
Низкая частота создает большие промежутки между импульсами и подает на двигатель относительно небольшую мощность.
При увеличении частоты нет заметных промежутков между импульсами, и двигатель получает почти постоянный сигнал.Это приводит к высокой средней мощности двигателя, который работает на полной скорости. Преимущество этой системы состоит в том, что когда двигатель работает в импульсном режиме, он, по сути, получает полную мощность во время периодов включения импульсов и может свободно потреблять большой ток питания, если нагрузка на двигатель действительно этого требует.
В результате двигатель приводится в действие последовательностью сильных импульсов, которые предотвращают остановку и обеспечивают улучшенный крутящий момент даже при пониженных скоростях.
На следующем рисунке изображена принципиальная схема импульсного управления скоростью двигателя постоянного тока.Здесь T1, D1, D2 и C1 получают достаточное питание постоянного тока от сети переменного тока. Tr1 подключен последовательно с двигателем, но его клемма затвора принимает выходной сигнал от нестабильной схемы мультивибратора.
Tr1 подключен последовательно с двигателем, но его клемма затвора принимает выходной сигнал от нестабильной схемы мультивибратора.
Эта схема ШИМ построена с использованием двух из четырех вентилей устройства CMOS 4001, которые используются в нестабильной схеме CMOS, которая представляет собой вполне обычную конструкцию.
Можно увидеть пару синхронизирующих резисторов, подключенных между выходом затвора 1 и переходом R1 и C2, что отличается от традиционной конструкции ШИМ.VR1 и R2 — это два резистора вместе с направляющими диодами D3 и D4, подключенными последовательно с выходом логического элемента И-НЕ 1.
Два диода гарантируют, что R2 работает как синхронизирующее сопротивление всякий раз, когда на выходе нестабильного устройства высокий уровень, а VR1 функционирует как временное сопротивление, когда выход низкий.
Период выходных импульсов постоянен, поскольку R2 имеет заданное значение. Интервал между ними можно было изменить, варьируя VR1. Это будет почти нулевое значение при настройке на самое низкое сопротивление. Расстояние между метками вывода больше десяти к одному при максимальном сопротивлении.
Расстояние между метками вывода больше десяти к одному при максимальном сопротивлении.
VR1, следовательно, можно отрегулировать для создания желаемой скорости двигателя с эффективным крутящим моментом, при этом самая низкая скорость происходит при полном сопротивлении, а самая высокая скорость — при нулевом сопротивлении.
Прецизионное управление двигателем с использованием одного операционного усилителя
Чрезвычайно тонкое или сложное управление постоянным током. Двигатель может быть получен с помощью операционного усилителя и тахогенератора. Операционный усилитель выполнен в виде переключателя, чувствительного к напряжению.В схеме, показанной ниже, как только выходная мощность тахогенератора становится ниже, чем заданное опорное напряжение, переключающий транзистор включается, и на двигатель подается 100% мощность.
Переключение операционного усилителя произойдет всего за пару милливольт от опорного напряжения. Вам понадобится двойной источник питания, который может быть просто стабилитроном.
Этот контроллер мотора обеспечивает плавную регулировку диапазона без каких-либо механических проблем.
Выходной сигнал операционного усилителя составляет всего +/- 10% от уровня шины питания, таким образом, используя двойной эмиттерный повторитель, можно контролировать огромные скорости двигателя.
Опорное напряжение может быть зафиксировано с помощью термисторов, LDR и т. Д. Экспериментальная установка, указанная на принципиальной схеме, использовала операционный усилитель RCA 3047A и двигатель мощностью 0,25 Вт 6 В в качестве тахогенератора, который генерировал около 4 В при 13000. об / мин для предполагаемой обратной связи.
Дополнительные схемы схем :
ШИМ-управление двигателем с использованием только BJT
В следующей схеме также используется принцип ШИМ для желаемого управления скоростью двигателя, однако он не зависит от каких-либо интегральных схем или ИС, а использует только обычные BJT. для реализации.Я взял это со страницы старого журнала.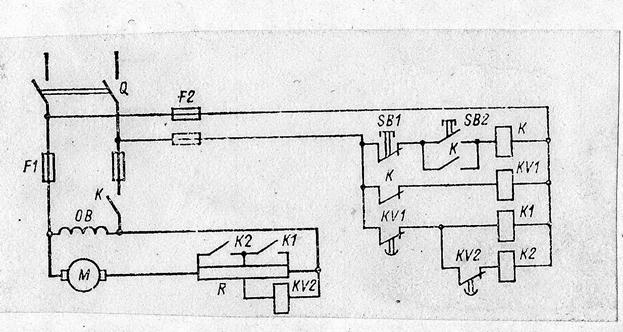
Цепи управления двигателем с использованием LM3524
IC LM3524 представляет собой специализированную схему ШИМ-контроллера, которая позволяет нам конфигурировать очень полезные и точные схемы управления скоростью двигателя, как описано ниже:
На приведенной выше диаграмме показана базовая схема управления ШИМ-двигателем с использованием IC LM3524. Конструкция дополнительно включает управление обратной связью на основе датчика через микросхему LM2907.
К валу двигателя прикреплен небольшой магнит, так что во время вращения магнит проходит вплотную к трансформатору со считывающей катушкой с железным сердечником.Этот механизм заставляет вращающийся магнит индуцировать резкий электрический импульс в считывающей катушке, который используется LM2907 в качестве триггерного входа и соответствующим образом обрабатывается как импульс управления обратной связью для LM3524 IC.
Система обратной связи гарантирует, что заданная скорость никогда не может отклоняться от заданной, обеспечивая точное управление скоростью. Гнездо на штыре № 2 LM3524 используется для управления скоростью двигателя.
Гнездо на штыре № 2 LM3524 используется для управления скоростью двигателя.
Бездатчиковое управление, без обратной ЭДС двигателя
Следующая конструкция ШИМ-управления скоростью LM3525 позволяет осуществлять управление с обратной связью без использования сложного механизма тахометра или громоздких датчиков, реализованных в предыдущей конструкции.
Здесь обратная ЭДС двигателя используется в качестве сигнала обратной связи и подается на вход IC LF198. В случае, если скорость имеет тенденцию к превышению установленного уровня, LF198 сравнивает нарастающий сигнал ЭДС с эталонным сигналом выборки с выхода LM393. Результирующий выходной сигнал отправляется на усилитель ошибки микросхемы LM3524 для необходимой обработки выходного ШИМ на транзисторы драйвера. Контролируемый ШИМ благодаря этой обратной связи без датчика через обратную ЭДС в конечном итоге позволяет двигателю оставаться точно зафиксированным на правильной скорости, которая регулируется потенциометром на контакте №2.
Регулятор скорости двигателя постоянного тока | Доступна подробная принципиальная схема
Вот простая схема контроллера переменной скорости электродвигателя постоянного тока, которая может быть настроена для управления скоростью движения дворников ветрового стекла автомобилей.
Схема состоит из таймера NE555 (IC1), транзистора драйвера двигателя средней мощности BD239 (T1), коммутирующего транзистора большой мощности BD249 (T2) и нескольких других дискретных компонентов. Он сконфигурирован для использования в автомобиле с отрицательной клеммой источника питания, подключенной к земле.
Цепь регулятора скорости двигателя
Здесь IC1 подключен как низкочастотный, автономный нестабильный мультивибратор с выходом контроллера скорости двигателя постоянного тока с широтно-импульсной модуляцией (ШИМ). Компоненты R-C, такие как R1, VR1, R2 и C1, определяют частоту колебаний.
Potmeter VR1 работает как главный регулятор скорости двигателя. Компоненты R3, C3 и C4 развязывают питание постоянного тока генератора. Красный светодиод мигающего типа (LED1) используется для визуальной индикации включения питания.’
Схемаконтроллера скорости двигателя постоянного тока. Когда рычаг стеклоочистителя потенциометра VR1 находится в верхнем положении, конденсатор C1 заряжается через R1, R2 и D1 и выдает серию импульсов на выходе IC1 с длинной отрицательной и короткой положительной длительностью импульсов. Следовательно, скорость двигателя низкая. С другой стороны, когда рычаг стеклоочистителя VR1 находится в нижнем положении, C1 заряжается через R1, R2 и VR1 и разряжается через R2. Получающаяся в результате последовательность импульсов имеет длинную положительную и короткую отрицательную ширину импульсов.
Теперь двигатель вращается с высокой скоростью.Выход на выводе 3 микросхемы IC1 подается на транзистор T1, который, в свою очередь, управляет двигателем постоянного тока через высокомощный переключающий транзистор T2 с выбранной скоростью. Резистор R4 ограничивает базовый ток транзитора T2.
Диод D2, подключенный встречно параллельно с двигателем постоянного тока, ограничивает обратную ЭДС. генерируется вращением мотора. Конденсатор С5 подавляет паразитные колебания.
Строительство и испытания
Схема управления двигателем может питаться от источника постоянного тока 12 В непосредственно от аккумуляторной батареи автомобиля.Для удобства и безопасности поместите его в небольшой металлический шкаф. Для строительства подойдет верборд средних размеров.
Используйте качественный DIP-разъем для IC1. Наконец, не забудьте добавить подходящий радиатор для транзистора T2.
Типы двигателей постоянного тока
- Матовый двигатель
- Бесщеточный двигатель
- Серводвигатель
Применение двигателей постоянного тока
- Малогабаритные двигатели постоянного тока используются в инструментах, игрушках и различной бытовой технике.
- Крупногабаритные двигатели постоянного тока используются в производственных подразделениях, электромобилях и лифтах.
Статья была впервые опубликована в декабре 2007 г. и обновлена 18 сентября 2020 г.
Как создать схему контроллера скорости двигателя постоянного тока с высоким крутящим моментом
Драйвер широтно-импульсной модуляции для управления скоростью двигателя
Создание электронной схемы для управления скоростью двигателя постоянного тока может показаться довольно простым, и вы сможете найти много таких обычных схем занимается регулированием скорости.Однако на практике вы обнаружите, что более простые схемы имеют один серьезный недостаток — они не могут плавно регулировать скорость двигателя на более низких уровнях, и, когда желаемая скорость уменьшается, крутящий момент двигателя также пропорционально уменьшается. Из-за этого в любой непредсказуемой точке мотор может просто очень резко остановиться. Кроме того, при включении питания двигатель может просто не запускаться при более низких настройках скорости и может потребовать первоначального ускорения путем увеличения настройки. Такие ситуации довольно нежелательны и не представляют собой идеального контроля скорости.
Предложенную схему можно считать практически идеальным регулятором скорости двигателя постоянного тока. По сути, это драйвер двигателя с широтно-импульсной модуляцией (PWM), который включает в себя два отдельных каскада для генерации импульсов. Внешний источник переменного напряжения постоянного тока эффективно преобразуется в изменяющийся сигнал ШИМ. Схема обеспечивает очень четко определенное и плавное управление скоростью подключенного двигателя даже на почти нулевых уровнях скорости, когда двигатель почти не движется, но никогда не останавливается. Переходы по скорости можно регулировать точно без каких-либо сбоев.Кроме того, схема позволяет двигателю поддерживать высокий крутящий момент и позволяет мгновенно запускаться при включении даже при минимальных настройках скорости. Схема также оснащена переключателем, позволяющим мгновенно менять направление вращения двигателя, когда это необходимо.
Описание схемы
Функционирование схемы можно понять по следующим пунктам:
Для генерации пропорционально изменяющихся импульсов ШИМ необходимо подавать внешне переменное напряжение постоянного тока на вывод № 11 ИС.Эти импульсы дополнительно обрабатываются и эффективно используются для управления скоростью подключенного двигателя от нуля до максимума.
Обращаясь к рисунку, который мы видим, двойной таймер IC 556 составляет основу схемы. Как следует из названия, ИС состоит из двух дискретных секций таймера. Эта двойная функция ИС была отлично использована для генерации необходимых импульсов ШИМ.
Одна половина (левая сторона) ИС была подключена как нестабильный мультивибратор. Конфигурация используется для создания стабильных и постоянных колебаний с частотой около 100 Гц.
Вышеупомянутые импульсы соответственно определяют требуемую частоту ШИМ.
Транзистор T5 здесь выполняет функцию источника постоянного тока для заряда C3.
T5 вместе с R4 и C3 образует генератор постоянной пилообразной волны.
Другая половина (правая сторона) ИС сконфигурирована как компаратор напряжения.
Постоянно регулируемое напряжение постоянного тока, приложенное к управляющему входному выводу № 11 этой половины ИС, и различные уровни напряжения в этой точке сравниваются с помощью генерируемого пилообразного напряжения, как объяснено выше.
Вышеупомянутая операция приводит к идеальному ШИМ, который становится доступным на выводе № 9 ИС.
6 вентилей IC4049 используются для буферизации выходного сигнала ШИМ перед его усилением.
Силовые транзисторы T1, T2 и T3, T4 используются для надлежащего усиления принятого сигнала ШИМ для управления подключенным двигателем постоянного тока, скорость которого необходимо регулировать.
Эти транзисторы вполне комфортно справляются с нагрузками до 6 ампер. Все диоды D1-D4 заземлены на случай возникновения обратной ЭДС (индуктивных скачков) двигателем и, таким образом, обеспечивают безопасную работу транзисторов.
Однократное нажатие на переключатель S1 позволит «резкую» остановку и немедленное последующее изменение направления вращения двигателя на противоположное в обе стороны, в зависимости от положения S1. Эту функцию может быть трудно найти во многих других схемах управления скоростью двигателя постоянного тока.
Список деталей
Все резисторы — 1 / 4Вт, 5%, CFR, если не указано иное.
R1, R2, R6, R7 = 1K,
R3 = 150K,
R4, R5 = 150E,
C1 = 0,1µ,
C2, C3 = 0.01µ,
C4 = 1 мкФ / 25 В, неполярный
T5 = BC 557B,
T1, T2 = TIP 122,
T3, T4 = TIP 127,
D1 —- D4 = 6 AMP, 300 В,
Z1 = 3 В / 400 мВт
N1 —- N4 = 4049,
IC1 = 556
S1 = SPDT
Контурная обратная ЭДС, цепь контроллера скорости двигателя переменного тока
Показанная схема обратной ЭДС, замкнутая Контроллер скорости электродвигателя переменного тока представлен по запросу г-на Амира, схема имеет следующие основные особенности:
Может работать с сильноточной нагрузкой переменного тока,
Крутящий момент прямо пропорционален нагрузке,
Обратная ЭДС от обмотка двигателя используется в качестве эталона для автоматической регулировки крутящего момента при увеличении нагрузки.
Список деталей
R1 = 56K,
R2 = 33K,
R3 = 15K,
R4 = 22K,
D1, D2, D3 = 1N4007,
T1 = BC5472, SC
Согласно указанному току нагрузкиC1 = 104/1 кВ, PPC
C2 = 100 мкФ / 100 В
L1 = от 30 до 50 мкГн, 6 ампер.
Есть ли у вас такие запросы? Сообщите нам, если это возможно, будут произведены здесь, в Bright Hub.
Simple 12V | 9V | Контроль скорости двигателя постоянного тока 6 В с режимом ШИМ
Сегодня я собираюсь показать вам эту схему.Вы хотите контролировать скорость двигателя постоянного тока? У нас есть много способов сделать это. Но при желании легко и дешево.
Это схема контроллера двигателя с регулируемой скоростью 12 В постоянного тока, использующая КМОП. В них используется принцип ШИМ-режима управления двигателем. Мы можем регулировать скорость небольшого двигателя 12 В. Даже двигатель 6 В или 9 В тоже может быть использован.
Это просто и использует несколько компонентов, таких как цифровая интегральная схема и драйвер транзистора в качестве основных.
Метод управления скоростью двигателя
Напряжение может хорошо контролировать скорость двигателя постоянного тока.
Обычно низкое напряжение вызывает низкую скорость двигателя. Но когда высокое напряжение вызывает высокую скорость двигателя.
Идея хорошего изменения напряжения — это импульс. Посмотрите на форму волны ниже.
Среднее напряжение импульсаПредставьте, что вы подключаетесь к лампе. Затем его яркость упадет. Среднее значение напряжения составляет половину напряжения источника питания.
У нас есть важное наблюдение:
- T = Период
- Частота = 1 / T
- Рабочий цикл = t / T x 100%
Среднее напряжение будет варьироваться в зависимости от:
Предположим, что: Уровень напряжения равно 10 В, t = 0.2 мс, T = 1 мс,
Рабочий цикл = 0,2 мс / 1 мс x 100% = 20%
Итак, среднее напряжение составляет 0,2 x 10 В = 2 В
Таким образом, нам нужен колебательный контур для управления включением-выключением двигателя. . И его можно отрегулировать в соответствии с рабочим циклом.
Что можно сделать разными способами. Но цифровые ворота — это просто и дешево.
Раньше мы использовали цифровой затвор в качестве генератора при мигании светодиода.
И мы используем шлюз «НЕ» от подключения 4011.
Также мы можем использовать шлюз «НЕ» для шлюза «НЕ».
Рекомендуется: Простые схемы светодиодных мигалок IC-4011
Посмотрите на изображение ниже.
Базовый генератор, использующий вентиль НЕ из логического элемента ИЛИ или ИЛИ-ИЛИ.
Связанный: 4011 Схемы тонального генератора
Но у нас есть еще одна интересная проблема. Когда нам нужна максимальная скорость, мы должны установить рабочий цикл на 100%.
Конечно, мы не можем найти нормальный коммутатор, который бы быстро работал на этом уровне.Как это сделать? Лучше всего использовать транзистор. К тому же это просто и дешево.
Посмотрите на базовый транзистор Дарлингтона. Они могут управлять двигателем 12 В при токе 1 А.
Базовый транзистор ДарлингтонаУ нас есть 2 принципиальные схемы, чтобы показать вам.
Преимущество этих двух схем в том, что если у вас есть двигатель или аккумулятор на 9 В или 6 В, вы можете использовать их немедленно. Потому что мы используем CMOS IC, которая может работать с напряжением от 3 до 15 В.
Первый: 4011 Управление скоростью двигателя постоянного тока
Если вы хотите управлять скоростью небольшого двигателя постоянного тока 12 В.Раньше увижу другие схемы. Я представляю эту схему, как показано на рисунке ниже.
Это простая схема. Потому что он использует CMOS с затвором 4011 NAND в качестве основной части и несколько других компонентов.
Который, как предполагается, работает в модели PWM (широтно-импульсная модуляция), поэтому имеет высокое значение. Он очень эффективен, низкое энергопотребление.
Интересная штука
- Мы используем потенциометр VR1 для регулировки скорости по мере необходимости.
- Далее мы используем два транзистора — TIP41 и BC548, чтобы подключить транзистор Дарлингтона, повышающий ток возбуждения.
- Мы должны держать теплоотвод на TIP41 из-за его тепла, когда они применяются.
- Пока двигатель функционирует, возможно обратный ток, он должен поставить диод D1-1N4148, чтобы предотвратить эту цепь.
Как это работает
Позвольте мне объяснить, почему это работает. Вот пошаговый процесс.
- Сеть переменного тока поступает в эту цепь к блоку питания. К ним относятся T1, D1, D2 и C1.
- T1 преобразует основное напряжение 220 В в 12 В.
- Затем ток переменного напряжения течет через D1-D4 к двухполупериодному выпрямителю в постоянный ток.
- И есть фильтр C1 для постоянного напряжения, который так хорошо сглаживает.
- Эта схема представляет собой двухполупериодный выпрямитель с центральным отводным трансформатором и двумя диодами.
- Также вы можете использовать мостовой выпрямитель без центрального трансформатора ответвлений и 4 диодов.
Этот ток делится на 2 части.
- К мотору: Почти все течет.
- К 4011 CMOS: генерировать прямоугольный импульс. Эта ИС включает в себя 4 логических элемента NAND. Но мы используем всего 2 ворот.Каждый будет установлен на вентили инвертора и подключен к генератору импульсов.
Регулировка рабочего цикла и колебаний
Если мы используем единственный резистор как базовую схему. Рабочий цикл составляет всего 50% и не настраивается.
Используем 2 резистора. Первый регулируемый. И оба диода D3 и D4 определяют направление тока заряда и разряда C2.
Позволяет неравномерно регулировать рабочий цикл. R2 определяет время, в течение которого выходной диапазон равен 1.
И R1, и VR1 установят время выходного диапазона равным 0.
Регулировка VR1 изменит рабочий цикл импульса.
Когда VR1 настроен на минимальное значение, рабочий цикл достигнет 100%. Скорость мотора будет максимальной.
Но когда VR1 высокий, ширина квадратного сигнала мала (остается больше места). Или рабочий цикл будет ниже.
Драйвер транзистора Дарлингтона
Так как выход CMOS не может управлять двигателем напрямую.Потому что его ток слишком мал.
Итак, мы используем транзистор для управления током. Используя два транзистора, соединенных по схеме Дарингтона, он имеет очень высокий коэффициент усиления по току. То есть
IO / IB1 = hFE1 = hFE1 hFE2 и
IC2 / IB1 = hFE1 hFE2
Транзистор Q2 будет пропускать ток напрямую. Выбор Q2 также должен соответствовать току двигателя. Не забывайте, что пусковой ток двигателя в несколько раз больше тока холостого хода.
Обычно это транзисторы, выдерживающие большой ток.У них низкий коэффициент усиления по току (hFE или B). Следовательно, hFE1 обычно больше, чем hFE2.
Как построить
Хотите построить? Эта схема состоит из нескольких частей. Итак, вы можете построить его на универсальной плате. Некоторые хотят сделать проект лучше. Смотрите ниже! Это разводка медной печатной платы и компоновка компонентов.
Медная компоновка печатной платы Компоновка компонентовВ остальном, на мой взгляд, вы умен. У вас есть определенные навыки, связанные с электроникой.
Перечень деталей
Резисторы 1 / 4Вт + -5%
R1: 4.7K
R2: 330K
VR1: переменные резисторы 2M (B)
Конденсаторы
C1: 0,1 мкФ Керамический тип
Полупроводниковые компоненты
IC1: CD4011, четырехканальный вентиль серии B с буферизацией NAND с 2 входами
Q1: 2SA561 , 0,15 А, 50 В, транзистор PNP
Q2: TIP41, 4 А, 40 В, транзистор NPN
D1, D2, D5: 1 А, 1000 В, диод, 1N4007
D3, D4: 0,75 А, 200 В, диод, 1N4148
Секунда: не затвор Управление двигателем с широтно-импульсной модуляцией
Это широтно-импульсная модуляция управления двигателем с помощью CD40106.Обычно мы просто вводим источник напряжения и постоянного тока в двигатель постоянного тока, что позволяет двигателю вращаться.
Если будет изменять или регулировать скорость вращения двигателя.
Нам нужно будет вводить напряжение в импульсах или периодически. Что сделает среднее напряжение на выходе другим.
Импульсное напряжение высокой частоты будет иметь среднее напряжение, чем низкочастотный импульс.
То же самое с импульсом с превышением рабочего цикла, у него будет среднее давление, намного превышающее значение низкого рабочего цикла.
Как работает CD40106 Управление двигателем с широтно-импульсной модуляцией
Среднее напряжение будет подаваться на двигатель постоянного тока. Для управления вращением мотора — медленным или быстрым.
В этой схеме используется вышеуказанный принцип. Сделав схему генератора импульсов или нестабильный мультивибратор.
Они состоят из затвора инвертора IC1 / 1 и IC1 / 2 с C1, R1, R2, VR1 и диода D1, D2.
Генератор сигналов имеет значение рабочего цикла, которое можно регулировать или вращать вместе с VR1.
Управление двигателем с широтно-импульсной модуляцией с помощью CD40106Импульсный сигнал цепи. Когда он настроен на слишком большой рабочий цикл, максимальное значение составляет 100% (сигнал имеет наиболее положительный импульс). Заставляет двигатель вращаться быстрее всех.
Если процент рабочего цикла уменьшен, скорость также уменьшится.
Импульсный выходной сигнал от IC1 / 2 поступит на Q1 (2N3906), Q2 (TIP41), которые подключены к схеме усилителя Дарлингтона. Чтобы продлить текущий импульс вверх.
Затем запустите двигатель, подключенный к выходным клеммам схемы.
Q2 (TIP41) действует через постоянный ток на двигатель. Выбор должен соответствовать текущему использованию двигателя.
Я выбираю больший ток, потому что, когда двигатель начинает потреблять больше тока от источника питания, чем при нормальном вращении. Или мотор не загружен.
Эта схема подходит для двигателя постоянного тока с небольшой мощностью. Он достаточно мал, чтобы напряжение и сила тока не превышали 12 вольт 2 ампер.
Что снижает потери мощности в двигателе и цепях.
Список деталей Резисторы 1/4 Вт + -5%
R1: 330 кОм
R2: 4,7 кОм
VR1: переменные резисторы 2 МОм
Конденсаторы
C1: 0,1 мкФ керамического типа
полупроводниковые компоненты
IC1: CD40106, CMOS шестнадцатеричные триггеры Шмитта
Q1: 2N3906- PNP-транзистор
Q2: TIP41- 4A, 40V NPN-транзистор
D1, D2: 0,75A, 200V диод, 1N4148
D3: 1A 10004007
Эта схема требует достаточного питания.У тебя есть это? Если у вас его нет. Посмотрите: Learn Many Power supply circuit
Останавливает проблемы с компонентами и не работает проект.
Хотя схемы не те.
Он также может управлять скоростью двигателя с помощью ШИМ.
Вам также могут понравиться:
CR: Фото двигателя от SWHstore
Но если вы хотите, чтобы схема была лучше, чем эта схема. увидеть эти схемы.
ШИМ-регулятор скорости, двигатель 12 В для двигателя постоянного тока с напряжением от 12 В до 24 В с использованием TL494.
Как сделать цепь регулятора скорости двигателя постоянного тока (50 В, 15 А)
Всем привет! Сегодня мы собираемся создать схему регулятора скорости двигателя постоянного тока, способную работать с двигателем постоянного тока 50 В и 15 А. Принципиальная схема, работа и компоненты, использованные при создании этого проекта, подробно описаны. Это наиболее полный контроллер скорости двигателя постоянного тока, который вы найдете в Интернете.
Вы можете посмотреть это видео для рабочей части проекта
Технические характеристики этого регулятора скорости двигателя постоянного тока:- Этот регулятор скорости принимает входное напряжение от 6 В до 50 В .
- МАКС. выходной ток составляет 15 А при использовании соответствующего радиатора,
- Имеют защиту от перенапряжения затвора и
- Защиту от обратного хода или скачков напряжения.
После подключения необходимого входа напряжения и двигателя к выходной клемме, скорость двигателя может быть увеличена или уменьшена с помощью потенциометра.
Схема контроллера скорости двигателя постоянного тока Принципиальная схема регулятора скорости двигателя постоянного тока Необходимые компоненты:- Регулятор напряжения LM317
- Таймер 555
- IRF3205S n-канальный Mosfet
- Конденсатор 330 мкФ (63 В)
- Конденсатор 220 мкФ (63 В)
- 47 мкФ конденсатор (63 В)
- X 1 9017 керамические конденсаторы
- 10 нФ керамические конденсаторы резисторы X 2
- резистор 330 Ом
- 6.2 кОм резистор
- 100-омный резистор
- 1n4007 диоды X 3
- 16 A диод Шоттки
- 100 кОм потенциометр
- 33-омный резистор
- 10 В стабилитрон
На первый взгляд эта схема может показаться очень сложной, поэтому давайте упростим ее. Эта схема разделена на три основные части:
Регулятор напряжения или понижающий преобразователь
Генератор ШИМ.
Цепь переключения.
Теперь давайте разберемся с каждой частью по очереди. Я использую настольный источник питания для питания схемы. И установите напряжение около 12 В в качестве входного напряжения для регулятора скорости. Я использую осциллограф для анализа сигналов.
Для лучшего понимания я сначала прохожу через схему переключения:
ЦЕПЬ ПЕРЕКЛЮЧЕНИЯ Цепь переключения регулятора скорости двигателя постоянного токаСхема переключения используется для включения и выключения выхода с очень высокой частотой.Здесь для выполнения этой работы используется Mosfet.
Mosfet может переключать высокое выходное напряжение, подключенное между его стоком и истоком, если пороговое напряжение приложено к его затвору. Это пороговое напряжение обычно намного меньше, чем напряжение, которое может переключать Mosfet, или напряжение между стоком и истоком.
Также, когда напряжение на затворе Mosfet увеличивается сверх порогового напряжения затвора, все больше и больше тока протекает через сток к источнику.
Здесь предостережение. : Пороговое напряжение — это напряжение, при котором полевой МОП-транзистор начинает немного проводить.Чтобы полевой МОП-транзистор проводил достаточно, чтобы управлять значительной нагрузкой, ему также необходимо дополнительное напряжение.
Таким образом, если двигатель постоянного тока подключен между затвором и истоком полевого МОП-транзистора, напряжение на нем и, следовательно, скорость могут контролироваться путем управления напряжением затвора. А для этого нам понадобится переменное напряжение на затворе. Теперь на помощь приходит ШИМ-генератор .
ЦЕПЬ ГЕНЕРАТОРА ШИМ Цепь генератора ШИМ регулятора скорости двигателя постоянного токаТребуемое переменное напряжение на затворе может быть легко обеспечено с помощью напряжения ШИМ.ШИМ или широтно-импульсная модуляция — это метод, используемый для получения любого напряжения между 0 и максимумом входного напряжения. Это достигается переключением входного напряжения на определенной частоте и определенном рабочем цикле.
Предположим, у нас есть входное напряжение 5В. Это может быть либо 5 В, либо 0. Теперь, если он включается и выключается с очень высокой частотой, мы получаем прямоугольную форму волны.
Допустим, время включения составляет 50% от общего времени. Эти 50% называются рабочим циклом волны ШИМ, что дает нам конечное напряжение 2.5вольт. По мере увеличения времени включения или рабочего цикла общее напряжение увеличивается.
И когда рабочий цикл достигает 100%, мы получаем выход 5 вольт. Точно так же, когда он находится на уровне 0%, мы получаем выход 0 вольт. Это называется МОДУЛЯЦИЯ ШИРИНЫ ИМПУЛЬСА, поскольку мы модулируем ширину импульса, чтобы получить переменное напряжение.
Подробнее о ШИМ здесь: Подробнее о ШИМ
Форма волны ШИМСхема регулятора скорости здесь генерирует сигнал ШИМ с помощью таймера 555 IC .Эта ИС обеспечивает необходимое переменное напряжение на затворе полевого МОП-транзистора, работая в нестабильном режиме.
Теперь существует определенный предел входного напряжения IC, который наверняка меньше предела напряжения этого регулятора скорости.
Следовательно, чтобы обеспечить подходящее рабочее напряжение для микросхемы таймера 555, используется схема регулятора напряжения, которая подает фиксированное напряжение на микросхему. Для этого в схеме используется стабилизатор напряжения LM317 .
ЦЕПЬ РЕГУЛЯТОРА НАПРЯЖЕНИЯ Цепь регулятора напряжения регулятора скорости двигателя постоянного токаЗдесь используется стабилизатор напряжения LM317.Он обеспечивает переменное напряжение от 1,25 до 37 вольт. Он используется здесь из-за его нескольких преимуществ перед другими регуляторами напряжения, такими как Programmable output Voltage , High output current , better line и load control.
Подробнее о регуляторах напряжения здесь: Подробнее о регуляторах напряжения
Как работает эта схема регулятора скорости?Конденсатор емкостью 330 мкФ подключен к клеммам входного питания для сглаживания постоянного тока.За ним следует резистор на 330 Ом, включенный последовательно с конденсатором емкостью 47 мкФ , образующим фильтр нижних частот, который затем питает регулятор напряжения LM317.
Этот регулятор напряжения запрограммирован с использованием двух резисторов (R3 и R2) , чтобы обеспечить постоянное напряжение 9 вольт.
Стоит отметить, что для создания этого выходного сигнала 9 В падение напряжения должно быть более 2,5 В или входное напряжение должно быть не менее 11,5 В. Чтобы получить выходное напряжение, отличное от указанного, вам необходимо изменить значения этих резисторов в соответствии с формулой частоты, указанной в таблице данных.
| VO = VREF (1 + R2 / R1) + (IADJ × R2) |
Загрузите техническое описание LM317 отсюда: техническое описание LM317
Здесь R2 — 6.2k, а R1 — 1k. С Идж. находится в диапазоне мкА, просто не обращайте на него внимания. Это дает нам выходное напряжение 9 вольт. Эти 9 вольт затем питают таймер 555 . Здесь мы используем таймер 555 в нестабильном режиме или в качестве генератора ШИМ.
ШИМ Напряжение, генерируемое таймером 555№ контакта.1 микросхема заземлена. 2 и 6 соединены вместе, а также 4 и 8. Конденсатор 220 мкФ сглаживает поступающие 9 вольт.
Теперь резистор 1 кОм , 2 диода 1N4007 , потенциометр 100 кОм и конденсатор 10 нФ образуют RC-цепь зарядки-разрядки, вызывая выход ШИМ на третьем выводе таймера 555.
Этот выход ШИМ управляет затвором МОП-транзистора. Если вы хотите узнать больше о таймере 555 и о том, как он генерирует волну ШИМ, я предлагаю вам просмотреть массу отличных статей, доступных в Интернете.
Подробнее о 555 таймерах здесь: 555 Подробнее о таймере
Около 555 проектов таймера с подробным объяснением: 555 проектов таймера
Цепь зарядки-разрядки RCНаиболее важным аспектом волны ШИМ является ее частота, и вот формула частоты таймера 555 для нее. Вы также можете рассчитать частоту вывода ШИМ с помощью онлайн-калькуляторов.
| Частота = 1,44 / (R1 + 2 × R2) × C1 Гц |
Загрузите техническое описание таймера 555 отсюда: техническое описание таймера 555
Калькулятор частоты ШИМ таймера 555: Калькулятор частоты таймера 555
Установка значения R1 (1 кОм), емкости (около 7 нФ из-за допуска и других факторов) и значения потенциометра, которое в моем случае составляет примерно 91 кОм в формуле, дает нам частоту 1100 Гц.
Конечно, это неточно из-за нескольких других факторов, которые влияют на схему. Фактическая частота составляет 1,3 кГц, что почти постоянно в диапазоне от 0 до 100% рабочего цикла выходного сигнала ШИМ.
Этот выход ШИМ управляет затвором Mosfet , подключенным через резистор на 33 Ом. IRF3205S может выдерживать ток до 110 А при надлежащей системе охлаждения и достаточном напряжении на затворе. Предел напряжения между стоком и источником составляет максимум 55 В. тогда как напряжение между затвором и источником составляет максимум 20 В.
Источник полевого МОП-транзистора заземлен, сток подключен к одной клемме выхода, а другая клемма — к 12 В. Таким образом, двигатель подключается между плюсом питания 12 В и стоком полевого МОП-транзистора .
Теперь, чтобы защитить полевой МОП-транзистор от скачков напряжения, вызванных двигателем, диод Шоттки подключен к двигателю или между стоком и плюсом источника питания 12 В.
Подробнее о обратных диодах можно узнать здесь: Основные сведения о обратных диодах
Диоды Шотткиобычно предпочтительны в обратных диодах, потому что они имеют самое низкое прямое падение (~ 0.2 В, а не> 0,7 В для малых токов) и способны быстро реагировать на обратное смещение (при повторном включении катушки индуктивности), или, другими словами, диод Шоттки имеет эффективное мгновенное время обратного восстановления, следовательно, подходит для высокочастотного Приложения.
Регулятор скорости двигателя постоянного тока в действии Контроллер скорости двигателя постоянного тока в действииПотенциометр контролирует скорость двигателя. А сигнал ШИМ, генерируемый таймером 555, отображается на осциллографе.Также могут быть измерены такие измерения, как рабочий цикл и Vpk-pk .
Важные моментыДля защиты от перенапряжения используйте стабилитрон между затвором и истоком МОП-транзистора, как указано на схеме.
Двигатель, которым я здесь управляю, рассчитан на 12 В и потребляет до 2 А при максимальной нагрузке, что не является такой большой нагрузкой. Следовательно, частота ШИМ 1 кГц здесь подойдет, но для больших двигателей частота должна быть выше 15 кГц. И чтобы настроить частоту ШИМ, измените значение потенциометра или конденсатора, чтобы получить желаемую выходную частоту.Так что имейте это в виду при использовании больших нагрузок.
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, даже несмотря на то, что они являются одними из старейших электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21 века?
Есть много потенциальных ответов на этот вопрос, но их хорошая управляемость является основной причиной того, что двигатели постоянного тока сохранились. Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его провода.Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают адекватную производительность при их стоимости. В этой статье мы рассмотрим некоторые распространенные контроллеры двигателей постоянного тока, как они работают, и обсудим, какие приложения наиболее популярны для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока.Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам устанавливать желаемое поведение двигателя, даже если их механизмы для этого различаются.
Наши статьи о параллельных двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока содержат подробные объяснения того, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость / крутящий момент двигателей постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя.Это позволяет упростить управление, так как снижение скорости приведет к увеличению крутящего момента, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсировать, просто переключая их провода, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять разными способами, включая контроллеры серводвигателей (подробнее см. В нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
Н-мостовая схема — один из простейших методов управления двигателем постоянного тока.На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
Рисунок 1: Н-мостовая схема для управления направлением двигателя постоянного тока.
Четыре переключателя управляются парами (1 и 4, 2 и 3), и когда любая из этих пар замыкается, они замыкают цепь и приводят двигатель в действие. Следовательно, четырехквадрантный двигатель может быть создан путем соединения определенных переключателей вместе, при этом изменение полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который по команде меняет направление вращения на обратное.Они легко продаются в виде микросхем и могут быть найдены в большинстве контроллеров на базе микропроцессоров, поскольку H-мост может быть уменьшен с помощью транзисторов до очень малых размеров.
Н-мосты не только могут изменять направление вращения двигателя, но также могут использоваться для регулирования скорости. Если требуется только направленное управление, тогда H-мост будет использоваться в качестве так называемого безрегенеративного привода постоянного тока. Однако создание рекуперативных приводов постоянного тока может быть усложнено. На рисунке 2 показан график, показывающий, как работают рекуперативные приводы:
Рис. 2: графики, представляющие направление скорости и крутящего момента при изменении полярности двигателя постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается разрыв, когда они находятся в оппозиции.
Большинство двигателей постоянного тока замедляются за счет отключения питания двигателя; Рекуперативные приводы включают возможность торможения, когда переключение полярностей во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «автомобильными» квадрантами, где двигатель обеспечивает ускорение в любом направлении, и это то, что контролируют нерегенеративные приводы.Квадранты 2 и 4 считаются «тормозными» квадрантами, в которых двигатель замедляется, и от этого выигрывают рекуперативные приводы. Когда скорость двигателя противоположна крутящему моменту двигателя, двигатель становится генератором, в котором его механическая энергия направляет ток обратно к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может подзаряжать источник питания, эффективно увеличивая КПД двигателя. На рисунке 3 показана упрощенная принципиальная схема для каждого квадранта и показано, как квадранты 2 и 4 отправляют ток обратно в источник для регенерации энергии:
Рисунок 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и напряжения питания.Обратите внимание, как направление тока (I
a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.Когда двигатель замедляется, E a (напряжение, создаваемое / используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время изучается регенеративное торможение в электромобилях и других приложениях, требующих максимальной эффективности. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM может использоваться во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, моделируя уменьшение / увеличение напряжения питания. Контроллеры привода с регулируемой скоростью отправляют на двигатель периодические импульсы, которые в сочетании с эффектом сглаживания, вызванным индуктивностью катушки, заставляют двигатель работать так, как если бы он питался от более низкого / более высокого напряжения. Например, если на двигатель 12 В подается сигнал ШИМ, высокий (12 В) в течение двух третей каждого периода и низкий (0 В) в остальное время, двигатель будет эффективно работать при двух третях полного напряжения, или 8 В.Следовательно, процент снижения напряжения или «рабочий цикл» ШИМ изменяет скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет практически непрерывно контролировать скорость двигателя. ШИМ часто сочетается с Н-мостами, чтобы обеспечить управление скоростью, направлением и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока — это изменить ток, протекающий через катушку возбуждения или через якорь.Скорость выходного вала изменится при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (продиктованного током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличивать сопротивление катушки якоря, чтобы уменьшить скорость, или увеличивать сопротивление статора, чтобы увеличить его, и все это путем регулирования сопротивления. Обратите внимание, что этот метод приводит к неэффективности двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на тепло, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Заявки и критерии отбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые следует ответить либо вашему исследованию, либо поставщику. Контроллеры двигателей постоянного тока может быть сложно указать из-за их разнообразия, поэтому список вопросов ниже будет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и используйте эти вопросы, чтобы сделать осознанный выбор:
- Какой диапазон номинального напряжения для используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления желателен (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя контролируется?
- Какой постоянный ток может подавать контроллер и соответствует ли он длительному потреблению тока двигателем под нагрузкой?
- Есть ли в системе встроенная максимальная токовая / тепловая защита?
- Какой будет метод управления при использовании микропроцессорных приводов (ШИМ, ПДУ, аналоговое напряжение и т. Д.))? Программное обеспечение необходимо?
- Вам нужен контроллер с двумя двигателями (один контроллер для двух независимых двигателей)?
Контроллеров двигателей постоянного тока доступно столько же, сколько самих двигателей постоянного тока; их изменчивость — одно из их самых сильных преимуществ. Их приложения также многочисленны, поскольку большинство разработчиков извлекают выгоду из какого-либо пользовательского ввода в их двигатель постоянного тока. В сферах робототехники, производства, военных приложений, автомобилей и многих других используются контроллеры двигателей постоянного тока с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут предоставлять простые средства управления с хорошей точностью по приемлемой цене.
Сводка
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http: // srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
Прочие изделия для двигателей
Больше от Instruments & Controls
УПРАВЛЕНИЕ ДВИГАТЕЛЕМ С ПЕРЕМЕННОЙ СКОРОСТЬЮ ПОСТОЯННОГО ТОКА
ЦЕЛИ:
• объяснить работу метода ускорения CEMF для двигателя постоянного тока.
• используйте элементарные схемы подключения, схемы подключения панели и внешнюю проводку. диаграммы.
• объясняет номиналы пусковых и пусковых устройств защиты.
• описывает принципы работы приводов постоянного тока с регулируемой скоростью вращения.
• укажите, как можно получить максимальную и меньшую скорости двигателя постоянного тока.
• перечислите преимущества приводов с регулируемой скоростью постоянного тока.
• Опишите, как твердотельные устройства могут заменить реостаты.
• делать простые чертежи приводов двигателей постоянного тока.
• перечислить преимущества использования тиристоров.
Хотя ручные пускатели все еще используются, в большинстве промышленных приложений используются оборудование автоматического управления двигателем, чтобы свести к минимуму возможность ошибок в человеческое суждение. Для установки и обслуживания оборудования автоматического управления двигателем, Электрик должен быть знаком с тремя видами электрических схем:
• принципиальные электрические схемы
• электрические схемы панели
• схемы внешних подключений
На принципиальной электрической схеме используются символы и простой план соединения для иллюстрации схемы управления и последовательности операций.
На схеме подключения панели показаны электрические соединения всех частей. панели контроллера и указывает внешние подключения. Все под контролем элементы представлены символами, но расположены в одинаковых относительных позициях на электрической схеме, которую они фактически занимают на панели управления. Потому что лабиринта проводов, показанного на монтажной схеме панели, трудно используйте для поиска и устранения неисправностей или для понимания работы контроллера.
По этой причине на принципиальной электрической схеме представлена последовательность операций контроллера, а диаграмма панели используется для поиска проблем и сбои в работе контроллера.
На схеме внешней проводки показана проводка от панели управления до двигателя и кнопочных станций. Эта диаграмма наиболее полезна для рабочего. кто устанавливает кабелепровод и провода между панелью стартера и блоком управления панель и мотор.
CEMF МЕТОД УПРАВЛЕНИЯ УСКОРЕНИЕМ ДВИГАТЕЛЯ
CEMF, создаваемая ротором, низкая в момент запуска двигателя. Как двигатель ускоряется, эта CEMF увеличивается. См. Перепад напряжения в разделе «Пуск. Текущий и CEMF »в Руководстве 1.Напряжение на якоре двигателя может использоваться для активации реле, уменьшающих пусковое сопротивление, когда достигнута правильная скорость двигателя.
Защита запуска и работы контроллера CEMF
Пусковая защита контроллера CEMF обеспечивается предохранителями в двигателе. фидер и ответвление цепи двигателя. Эти предохранители рассчитаны на в соответствии со статьей 430 Национального электротехнического кодекса.
Защита от работы для контроллера, как определено в Части III Статьи NEC 430, обеспечивается термоэлементом перегрузки, включенным последовательно с арматура.Термоэлемент рассчитан на от 115% до 125% полной нагрузки якоря. Текущий. Как указано в NEC 430.32, если ток превышает процент номинальное значение тока якоря, тепло, выделяемое в термоэлементе, вызывает биметаллическая полоса для размыкания или размыкания термоконтактов, подключенных в цепь управления. Значение тока в период пуска двигателя. не длится достаточно долго, чтобы нагреть термоэлемент в достаточной степени, чтобы вызвать его открыть.
ЦЕПЬ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ
Запуск двигателя постоянного тока
См. РИС.1. Включите главный выключатель линии, прежде чем нажимать кнопку запуска. кнопка. После нажатия кнопки пуска срабатывает управляющее реле М. Цепь управления теперь завершена от L1 через тепловую перегрузку (OL). контакты 6-7, через контакты кнопки пуска 7-8, и через нормально замкнуты контакты 8-9 кнопки останова на L2. Нижние вспомогательные уплотнительные контакты 7-8 реле М также замыкают и обходят кнопку пуска. В итоге старт кнопку можно отпустить без нарушения работы.
РИС. 1 Элементарная схема регулятора постоянного тока CEMF.
Когда главные контакты 2-3 контактора М замкнуты, цепь якоря двигателя завершается от L1 через контакты 1-2 термоэлемента перегрузки, через контакты 2-3 реле М, через пусковой резистор и через якорь ведет 4-5 к L2. Цепь шунтирующего возбуждения F1-F2 подключена параллельно с цепь якоря. Контакты 3-4 контактора CEMF A остаются разомкнутыми при запуске. потому что высокий пусковой ток вызывает высокое падение напряжения на резисторе 3-4.Это оставляет лишь небольшое падение напряжения на якоре и контакторе A. катушку до тех пор, пока не будет достигнуто ускорение. По мере того, как CEMF проходит через арматуру, он действует как резистор, который понижает больший процент приложенного напряжения, тем самым обеспечивая падение напряжения на катушке А и на контактах А 3-4, близких к ток байпаса вокруг пускового резистора.
Подключение двигателя к сети
CEMF, генерируемая в якоре, прямо пропорциональна скорости мотор.
По мере ускорения двигателя скорость приближается к нормальной полной скорости, и CEMF увеличивается до максимального значения. Реле А откалибровано для работы при примерно 80% номинального напряжения.
Когда контакты 3-4 реле A замыкаются, пусковое сопротивление 3-4 обходится, и якорь подключается через линию.
Защита от перегрузки при работе
Тепловое реле перегрузки состоит из двух цепей. Одна цепь включена последовательно с якорем, и по ней течет ток якоря. через термодатчик или нагревательный элемент.Вторая цепь реле перегрузки — это цепь управления с управляющим контактом. Если контакт размыкается, из-за чрезмерного нагрева в тепловом нагревателе цепь управления будет прерван и остановит двигатель. Показан блок теплового реле перегрузки. на фиг. 2. Принципиальная схема представлена на фиг. 3.
РИС. 2
(A) Реле перегрузки из плавящегося сплава со снятым левым нагревателем. (В) А
биметаллический перегрузочный узел со снятым ТЭНом (под биметаллическим реле).
См. РИС. 1 для следующего объяснения. Когда ток нагрузки якорь превышает номинально допустимый процент от тока полной нагрузки, термоэлемент перегрузки (точки 1-2) нагревается и размыкает контакты 6-7 в цепь управления. Реле управления M обесточено, а главные контакты 2-3 М открыть и отсоединить мотор от сети.
РИС. 3 Условные обозначения теплового реле перегрузки. Нагреватель и
контакты вместе составляют реле перегрузки.
Остановка двигателя
При нажатии кнопки остановки цепь управления разрывается в точках 8-9. Выполняется та же последовательность отключения, что и в случае состояния перегрузки. обсуждалось ранее. Цепь уплотнения 7-8 в каждом случае нарушена.
Преимущество данного типа автоматического пускателя в том, что он не подает полное напряжение на якоре до тех пор, пока скорость двигателя не станет правильной. В стартер исключает человеческую ошибку, которая может возникнуть в результате использования ручного стартера.
СХЕМА СОЕДИНЕНИЙ ПАНЕЛИ
РИС. 4 Монтажная схема панели для контроллера мотора DC CEMF.
РИС. 4 показана та же схема управления CEMF, представленная на фиг. 1. Однако схема подключения панели определяет расположение проводки на панели по отношению к фактическое расположение клемм оборудования на задней стороне панели управления. Для устранения неполадок или проверки исходных установок требуется точное сравнение элементарных принципиальных схем и панельных схем.Электрик должен используйте систему проверки соединений на схеме с фактическими соединениями панели. Например, цветным карандашом можно сделать отметки на схеме. поскольку каждое соединение правильно отслеживается на панели и сравнивается со схемой.
ТРУБОПРОВОД ИЛИ ВНЕШНЯЯ ЭЛЕКТРОПРОВОДКА
Показана вся необходимая внешняя проводка между изолированными панелями и оборудованием. на плане трубопровода (фиг. 5). Подходящий размер, размер и количество кабелепровода Количество проводов и назначение каждого провода указаны на этом плане.Электрик ссылается на этот план при завершении фактической установки контроллера CEMF.
РИС. 5 Схема кабелепровода или внешней проводки для контроллера CEMF.
ПРИВОДЫ С РЕГУЛИРОВКОЙ СКОРОСТИ ПОСТОЯННОГО ТОКА
Приводы с регулируемой скоростью постоянного токадоступны в удобных модулях, которые включают: все необходимые цепи управления и питания.
Некоторые требования к оборудованию настолько точны, что некоторые переменные частоты переменного тока диски могут не подходить. В таких случаях двигатели постоянного тока обеспечивают характеристики, недоступные для двигателей переменного тока.Двигатель постоянного тока с регулируемой регулировка напряжения очень универсальна и может быть адаптирована к большому разнообразию Приложения.
Мотор-генераторная установка в большем диапазоне мощностей раньше была одной из наиболее широко используемые методы получения частотно-регулируемого управления. Набор состоит двигателя переменного тока, приводящего в действие генератор постоянного тока, для подачи энергии на двигатель постоянного тока. Такой мотор-генератор приводы набора, иногда называемые системами Уорда-Леонарда, использовались в ранних двигателях постоянного тока управления и продолжали устанавливаться до 1980-х годов, чтобы контролировать скорость двигателя, регулируя мощность, подаваемую на поле генератора, и, как результат, выходное напряжение на двигатель (ФИГ.6). Генератор ток возбуждения можно изменять с помощью реостатов, как показано на рисунке, или с помощью регулируемых трансформаторов. питание выпрямителя постоянного тока или автоматически с использованием полупроводниковых элементов управления. Когда желательно также контролировать поле двигателя, используются аналогичные средства. использовал. Многие из этих систем все еще работают, но одна устанавливается редко. как новая система.
Скорость и крутящий момент системы, показанной на фиг. 6 может управляться регулировка напряжения на поле или на якорь, или на то и другое.Скорости выше базовая скорость двигателя (скорость, указанная на паспортной табличке) получается путем ослабления двигателя. поле шунта. Скорости ниже базовой скорости двигателя достигаются путем ослабления поле генератора. В результате происходит снижение напряжения генератора. питание якоря двигателя постоянного тока. Двигатель должен иметь полное шунтирующее поле для скорости ниже, чем базовая скорость, чтобы создать эффект непрерывного управления, а не ступенчатое регулирование скорости двигателя.
Двигатель, используемый для обеспечения мощности привода, может быть трехфазным индукционным. двигатель, как показано на фиг.6. После запуска приводного двигателя он запускается. непрерывно с постоянной скоростью для привода генератора постоянного тока.
Якорь генератора электрически связан с якорем двигателя. как показано.
Если напряженность поля генератора изменяется, напряжение от постоянного Генератором можно управлять для подачи любого количества тока на двигатель постоянного тока. В результате двигатель постоянного тока может вращаться с разными скоростями. Потому что индуктивности полей постоянного тока и времени, необходимого генератору для нарастание напряжения, чрезвычайно плавное ускорение достигается с нуля об / мин до скоростей, превышающих базовую скорость.
Поле генератора постоянного тока можно реверсировать автоматически или вручную, с в результате реверсирование вращения двигателя.
Сопротивление поля генератора может быть изменено автоматически с помощью тиристоров. (или тиристоры) или реле с выдержкой времени, управляемые CEMF через якорь двигателя. Сопротивление поля генератора также можно изменить вручную.
Электроприводы с регулируемой скоростью вращения предлагают широкий выбор диапазоны скоростей, крутящий момент и характеристики мощности.Они предоставляют средства для управления ускорением и замедлением, а также методы автоматического или ручная операция. Управляющий сигнал обратной связи тахометра может быть вал двигателя постоянного тока. Это усовершенствование системы для получения заданной константы скорость. Этот метод зависит от типа приложения, скорости и степени желаемый ответ. Помимо скорости, управляющий сигнал обратной связи может быть настроенным на реакцию на давление, натяжение, удар или другую функцию датчика.
РИС.6 (A) Основная электрическая теория двигателя-генератора постоянного тока с регулируемой скоростью
система контроля. (B) Мотор-генератор в сборе с регулятором скорости постоянного тока
система питается от сети переменного тока.
Одна из самых выгодных характеристик привода мотор-генераторной установки. это присущая ему способность к регенерации. Другими словами, когда высокоинерционный нагрузка перегружает двигатель, двигатель постоянного тока становится генератором и обеспечивает обратный ход. власть. Например, предположим, что двигатель постоянного тока работает на базовой скорости. Если генератор напряжение снижается путем регулировки реостата для замедления двигателя, двигатель противодавление будет выше, чем напряжение генератора, а ток переворачивает.Это действие приводит к обратному крутящему моменту в двигателе, и двигатель замедляет. Этот процесс называется динамическим торможением. Эта динамическая функция очень желателен при использовании на подъемниках для опускания тяжелых грузов, металлообрабатывающих станках, машины для обработки текстиля и бумаги, а также в общей промышленности для контролируемых остановка высокоинерционных нагрузок. Также возможно использование нескольких моторных приводов. с этим типом привода мотор-генератора.
Приводы мотор-генераторных установок с автоматическими регуляторами используются в течение многих лет почти для всех типов приложений.Более высокая степень сложности в разработаны элементы управления, позволяющие удовлетворить практически любые пожелания уровень точности или ответа.
СТАТИЧЕСКИЕ ПРИВОДЫ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ
Несмотря на предыдущее использование приводов мотор-генераторов, вращающиеся машины требовалось преобразовать переменный ток в механическую энергию. В результате комбинированный КПД установки невысокий; требуется обычная вращающаяся машина обслуживание, и это шумно. Используемые в настоящее время статические приводы постоянного тока не двигаются части оборудования для преобразования энергии, которое преобразует (выпрямляет) и управляет мощность переменного тока (рисунки 7 и 8).Твердотельные устройства используются для контролируемых преобразование сетевого питания переменного тока в постоянный.
Основная теория для получения скоростей двигателя постоянного тока ниже и выше базовой скорости то же, что и с мотор-генераторной установкой. Только метод управления напряжение и напряженность поля различаются. Например, на фиг. 9, якорь питается постоянным током, выпрямленным от источника переменного тока.
Переменный ток выпрямляется за счет использования тиристора в управляемой цепи для получения ОКРУГ КОЛУМБИЯ. Затвор тиристора включает тиристор на соответствующей части полуволна, тем самым управляя двигателем ниже базовой скорости.ИНЖИР. 9 — это упрощенная схема для иллюстрации. Напряженность поля будет таким же образом удерживать в полную силу. Для скоростей выше мотора базовая скорость, контроль поля может ослабить напряженность поля при полной арматуре Напряжение. Тахометр с обратной связью поддерживает заданную скорость.
РИС. 7 Панель управления приводом постоянного тока с SCR-управлением.
РИС. 8 тиристоров различных размеров.
РИС. 9 Однофазный полуволновой якорь, управляющий небольшим двигателем.
На ФИГ. 9, SCR контролируется настройкой потенциометра, или контроль скорости.
Это изменяет время включения тиристора на цикл переменного тока, и, таким образом, изменяет величину среднего тока, протекающего через якорь. Когда контроль скорости выше базовой скорости требуется, схема выпрямителя в поле управляется тиристорами, а не диодами.
SCR, или тиристор, может контролировать всю положительную форму волны или напряжение через использование метода, называемого фазовым сдвигом.Освещение теории метода выходит за рамки данного руководства.
SCR, вероятно, является самым популярным твердотельным устройством для управления большими и малые электрические нагрузки. SCR — это управляемый выпрямитель, который управляет электрический ток. Он не будет проводить, когда напряжение на нем будет в обратное направление.
Он будет проводить только в прямом направлении при правильном сигнале (напряжении). прикладывается к выводу затвора (см. фиг. 10). Ворота нормально управляются электронными импульсами от цепи управления.
Затвор включает тиристор, но не выключает его в цепи постоянного тока. К включить анодно-катодную часть тринистора (замкнуть переключатель), затвор должен быть той же полярности, что и анод по отношению к катоду. После ворот включил SCR, он остается включенным до тех пор, пока ток, протекающий через цепь питания (анод-катодная секция) либо обрывается, либо падает до низкого уровня. уровня, достаточного для выключения устройства. Анод-катодный ток должен упасть ниже текущего уровня удержания.Удерживающий ток или поддерживающий current — это величина тока, необходимая для того, чтобы тиристор оставался включенным. SCR выполняет ту же функцию, что и реостат, контролируя напряженность поля двигателя. или напряжение на якорь. Это похоже на переменное сопротивление, потому что оно можно регулировать во всем диапазоне мощности. Регулятор SCR заменил реостат, потому что он меньше по размеру для того же номинального тока, больше энергии эффективнее и дешевле.
РЕЗЮМЕ
Двигатели постоянного токануждаются в элементах управления для запуска, остановки, защиты и регулировки скорости и крутящий момент мотора.
Используемые системы должны соответствовать требованиям NEC, а также иметь одобрение тестирования. таких фирм, как Underwriters Laboratories, Inc. Двигатели должны быть защищены от перегрева и повреждения мотора и окружающей среды. В этом руководстве представлены два основных стиля схем подключения: схема, который показывает электрическую последовательность работы компонентов и проводку диаграмма, которая показывает физическое расположение оборудования. Мотор-генератор были представлены наборы для ознакомления с возможными источниками управления постоянным током.В настоящее время большая часть управления осуществляется твердотельными электронными приводами постоянного тока.
РИС. 10 Схематическое изображение SCR.
ВИКТОРИНА
Выберите правильный ответ для каждого из следующих утверждений и поместите соответствующую букву в отведенном для этого месте.
1. Наименее важный план или схема при поиске и устранении неисправностей в системе управления двигателем: вероятно _____
а. электрическая схема.
г. диаграмма панели.
г.план внешнего водовода.
г. схема помещения, в котором установлены контроллеры.
2. Лучшей диаграммой для определения того, как работает контроллер, является ____
а. электрическая схема.
г. план панели.
г. внешний план.
г. архитектурный план.
3. Физическое расположение контрольных проводов показано на
.а. электрическая схема.
г. архитектурный план.
г.план водовода.
г. схема подключения панели.
4. Контроллер DC CEMF является результатом автоматических действий _
а. приложенное напряжение.
г. изменение напряжения на якоре.
г. изменение напряжения в поле.
г. пусковой ток.
5. Защита от перегрузки такая же, как _
а. пусковая защита.
г. механическая защита.
г. электрическая защита.
г.защита от бега.
6. Контакты перегрузки размыкают цепь, когда ток двигателя достигает _
а. 85% полной нагрузки.
г. 100% от полной нагрузки.
г. 125% от полной нагрузки.
г. 150% от полной нагрузки.
7. В случае выхода двигателя за допустимое значение защищен _
а. пусковая защита.
г. предохранители.
г. перегрузочный термоэлемент.
г. кнопку остановки.
8.При замкнутом выключателе шунтирующее поле на фиг. 1 размещен через линию, когда
а. Контакт замыкается.
г. выключатель замкнут.
г. Контакт M замыкается.
г. кнопка запуска закрывается.
9. На фиг. 1, контакт A замкнут, когда
а. кнопка запуска закрыта.
г. кнопка остановки открыта.
г. Катушка обесточена.
г. Катушка находится под напряжением.
10. Двигатель, показанный на РИС.1 помещается поперек линии, когда
а. кнопка запуска закрыта.
г. выключатель замкнут.
г. контакт A замкнут.
г. контакт M замкнут.
11. Какова базовая скорость двигателя постоянного тока? ___
12. Каким образом регулируется скорость двигателя постоянного тока выше базовой? __
13. Каким образом регулируется скорость двигателя постоянного тока ниже базовой? __
14. Как SCR может заменить реостат? ___
15.Перечислите преимущества использования тиристоров в управлении моторным приводом. __
.