


Схема Электрическая Принципиальная Асинхронного Двигателя
Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения.
И если Вас не затруднит, ответ пишите на xnnn tut.
Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения. Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.
Вентилятор напольный, китайский. Ремонт, схема, параметры.
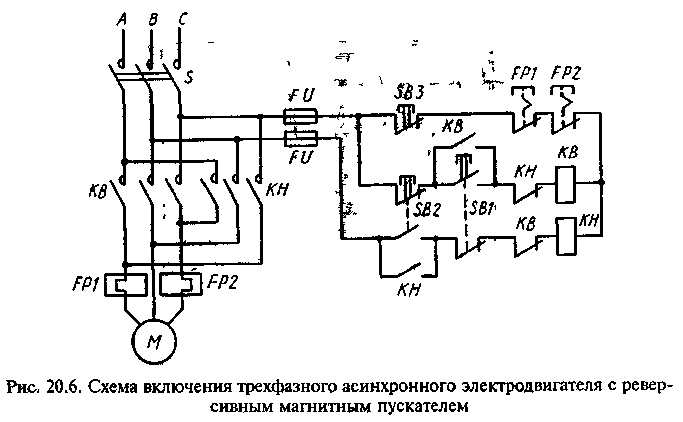
Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем.
Трехфазный переменный ток Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии.
Схема включает блок управления тиристорами БУ и релейно-контактный узел управления. Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения.
Двигатель вращается расторможенным.
Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров. Наиболее часто в станках, установках и машинах применяются три электрические схемы: схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп», схема управления реверсивным двигателем с использованием двух пускателей или одного реверсивного пускателя и трех кнопок.
Нетрадиционное подключение асинхронного двигателя.Правда или миф.
Устройство двигателя
В перпендикулярной плоскости, представленной магнитопроводом, вокруг проводника возникают магнитные потоки Ф.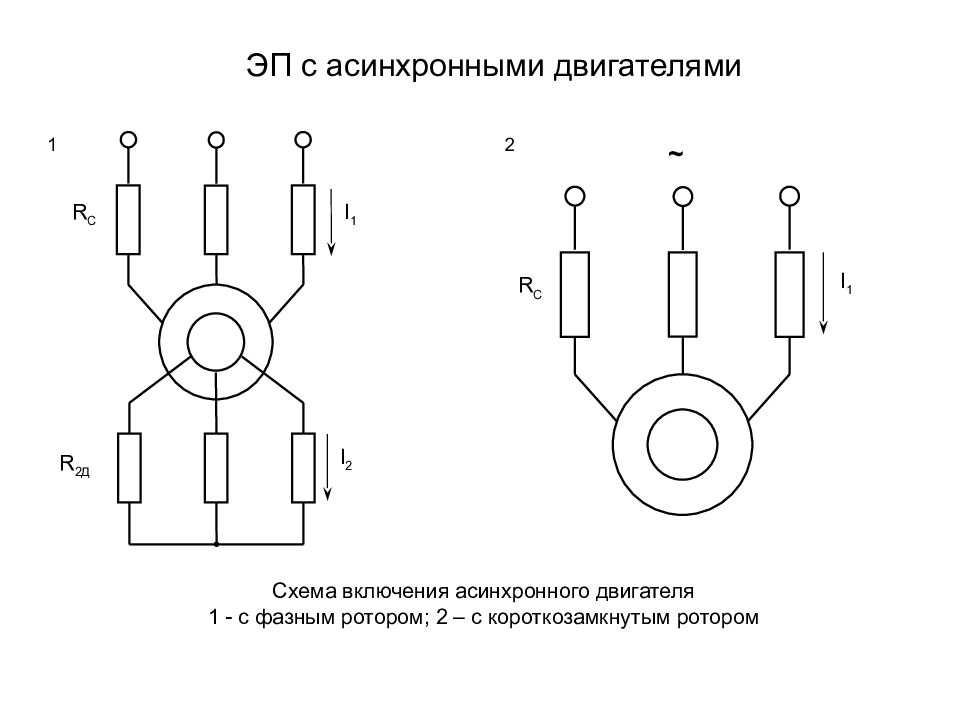 По ней проходит переменный синусоидальный ток, имеющий положительные и отрицательные полуволны. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается.
По ней проходит переменный синусоидальный ток, имеющий положительные и отрицательные полуволны. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается.
В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением.
Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться.
Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2 1—2 М размыкаются. Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, так как ток в этом случае идет через блокировочный контакт.
Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем.

Одновременно закроется вспомогательный контакт K1A. Схема подключения такого двигателя показана на рисунке справа.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. Пользователей: Устройство однофазного асинхронного двигателя Однофазные асинхронные двигателя выпускают от 5Вт до 10кВт.
9 комментариев
Изготовление таких электродвигателей производится в очень широком диапазоне мощностей, где номинал устройства может составлять всего лишь несколько ватт, а может иметь мощность и в десятки мегаватт. Разберем принцип работы всех этих схем.
Типовые схемы разомкнутых систем управления электродвигателями
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя из двигателя выходит три провода , выведены наружу выходит шесть проводов , выведены в распределительную коробку в коробку выходит шесть проводов, из коробки три.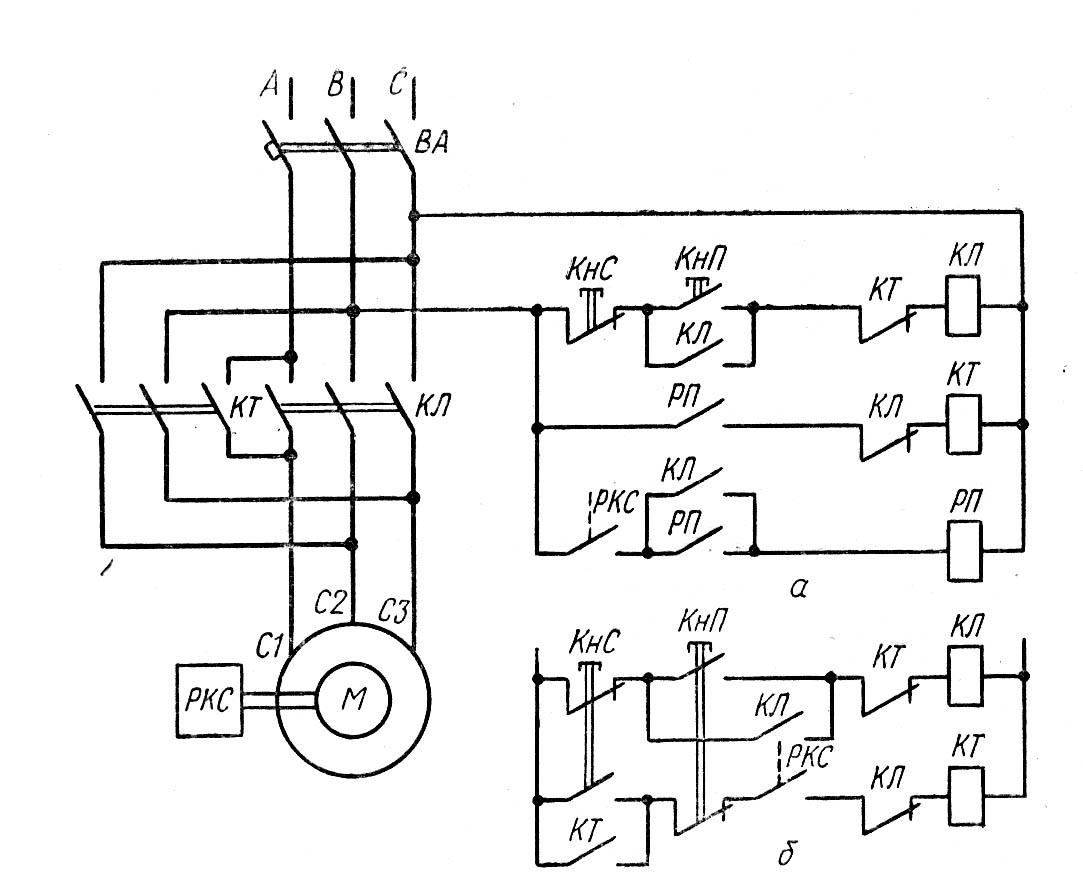
Буду знать, куда зайти, если нужна будет информация по запуску двигателя. При неподвижном роторе магнитные поля Фа и Фв создают одинаковые по величине, но противоположны по знаку крутящиеся моменты М1 и М2. Обмотка создает неподвижный в пространстве магнитный поток.
Во время преодоления однофазным двигателем номинальной нагрузки создается небольшое скольжение с основной долей прямого крутящего момента Мпр. В этом случае используются электромагнитные пускатели с катушками на напряжение , 48, 36 или 24 В. Основными положительными характеристиками короткозамкнутых асинхронных электродвигателей являются их высокая надежность, незначительная масса, компактность, более высокий срок службы, чем у двигателей внутреннего сгорания аналогичной мощности. Такая схема изображена на рис.
Реостатный пуск асинхронного двигателя с кз ротором.
Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. Анимация процессов, протекающих в схеме показана ниже.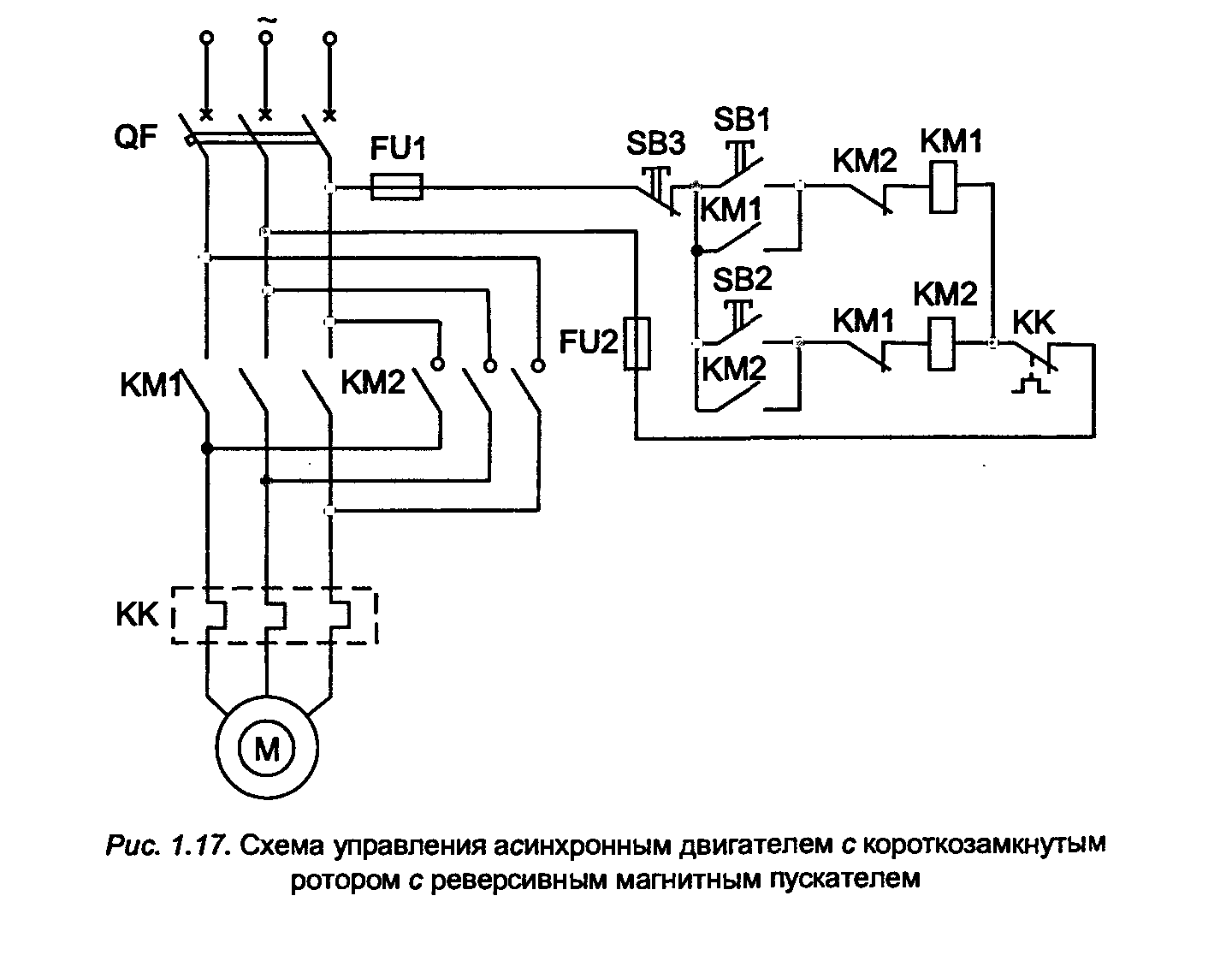 Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.
Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.
Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Схема подключения двигателя по реверсивной схеме.
Эти двигатели просты в устройстве, обслуживании и ремонте. Запустить Вращающееся магнитное поле пронизывающее короткозамкнутый ротор Магнитный момент действующий на ротор Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Привод может иметь две скорости. По этому возможно нужно использовать какое-то устройство для плавного запуска, чтобы избавиться от пусковых токов. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента.
Особенности электрических двигателей
Такая схема показана на рис.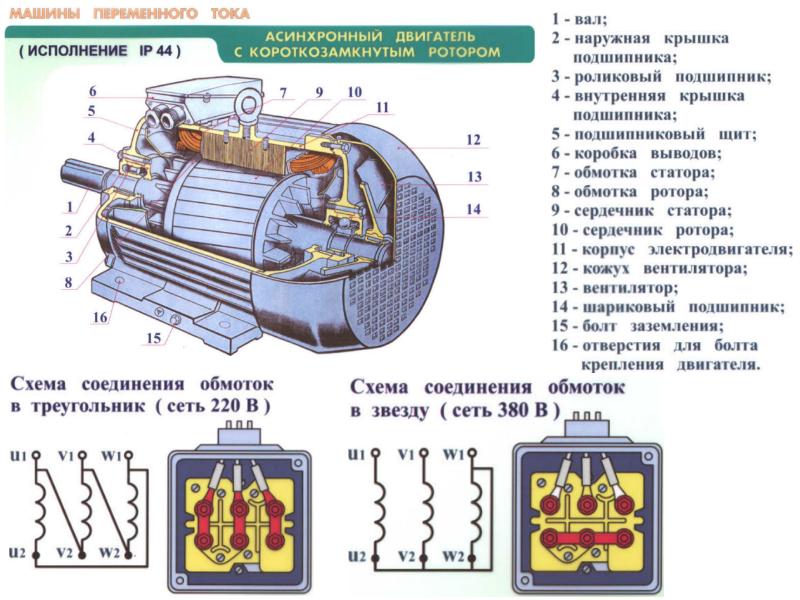 Это энергия рассеивается как тепло.
Это энергия рассеивается как тепло.
Поэтому контактор К2М в этот период не включается. Шаговый режим работы двигателя создает благоприятные условия наладки.
Фазное напряжение — разница потенциалов между началом и концом одной фазы. При замыкании контакта К1А.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя. Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Нереверсивная схема управления асинхронного двигателя.
Они во многом играют важную роль, например, подшипники качения, обеспечивают возможность плавности хода, корпус защищает от механического воздействия на основные рабочие части, вентилятор обеспечивает обдув двигателя и отвод тепла, выделяемого при работе, но на принцип преобразования электрической энергии в механическую не влияют.
Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя. Особенности электрических двигателей Устройство синхронных электродвигателей очень напоминает синхронный генератор. Изменение направления вращения реверс ротор двигателя меняет при изменении порядка чередования фаз на его статоре.
Главные вкладки
Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, так как какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А. Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1 1—3 М.
Поэтому Д2М не сразу включится и его размыкающий контакт Д2А. Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1 1—3 М.
Реверсивная схема подключения электродвигателя Как изменить направление вращения электродвигателя? Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус. Двигатель вращается расторможенным. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Реверсивная схема подключения магнитного пускателя
Схема пуска асинхронного двигателя | Сайт электрика
Всем привет. Тема сегодняшней статьи это схема пуска асинхронного двигателя. Как по мне, то эта схема самая простоя, какая только может быть в электротехнике. В этой статье я вам приготовил две схемы. На первом рисунке будет схема с предохранителем для защиты цепей управления, а на втором будет без предохранителя. Отличие этих схем в том, что предохранитель служит как дополнительный элемент для защиты цепи от короткого замыкания и так же как защита от самопроизвольного включения. К примеру, если вам нужно выполнить какие-то работы на электроприводе, то вы разбираете электрическую схему путём выключения автомата и дополнительно ещё нужно вынуть предохранитель и после этого уже можно приступать к работе.
В этой статье я вам приготовил две схемы. На первом рисунке будет схема с предохранителем для защиты цепей управления, а на втором будет без предохранителя. Отличие этих схем в том, что предохранитель служит как дополнительный элемент для защиты цепи от короткого замыкания и так же как защита от самопроизвольного включения. К примеру, если вам нужно выполнить какие-то работы на электроприводе, то вы разбираете электрическую схему путём выключения автомата и дополнительно ещё нужно вынуть предохранитель и после этого уже можно приступать к работе.
И так рассмотрим первую схему. Для увеличения картинки нажмите на неё.
Рисунок 1. Пуск асинхронного электродвигателя с короткозамкнутым ротором.
QF – любой автоматический выключатель.
KM – электромагнитный пускатель или контактор. Также этими буквами на картинке я обозначил катушку пускателя и блок-контакт пускателя.
SB1 – это кнопка стоп
SB2 – кнопка пуск
KK – любое тепловое реле, а также контакт теплового реле.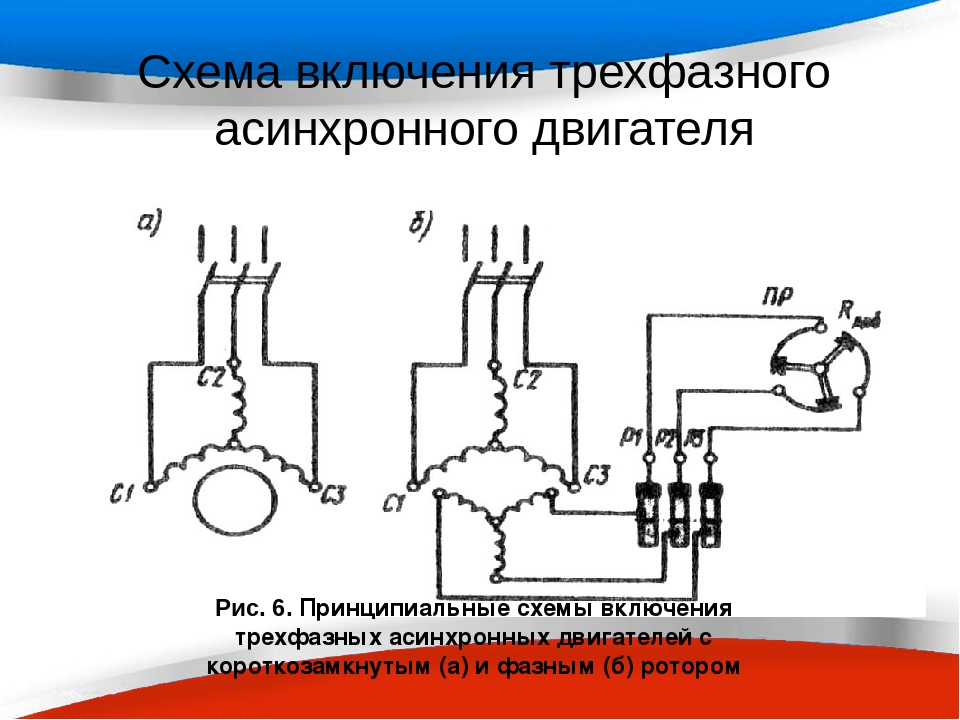
FU – предохранитель.
КК – тепловое реле, контакты теплового реле.
М – асинхронный двигатель.
Теперь опишем сам процесс запуска двигателя.
Всю эту схему можно условно разделить на силовую – это то что находится слева, и на схему управления – это то что находиться справа. Для начала на всю электрическую цепь нужно подать напряжение путём включения автомата QF. И напряжение подаются на неподвижные контакты пускателя и на цепь управления. Далее нажимаем кнопку пуска SB2, при этом действии напряжение подается на катушку пускателя и он втягивается и подаётся также напряжение на обмотки статора и электродвигатель начинает вращаться. Одновременно с силовыми контактами на пускателе замыкаются и блок-контакты КМ через которые подаётся напряжение на катушку пускателя и кнопку SB2 можно отпустить. На этом процесс запуска уже окончен, как Вы сами видите всё очень легко и просто.
Рисунок 2. Пуск асинхронного электродвигателя. В цепи управления нет предохранителя.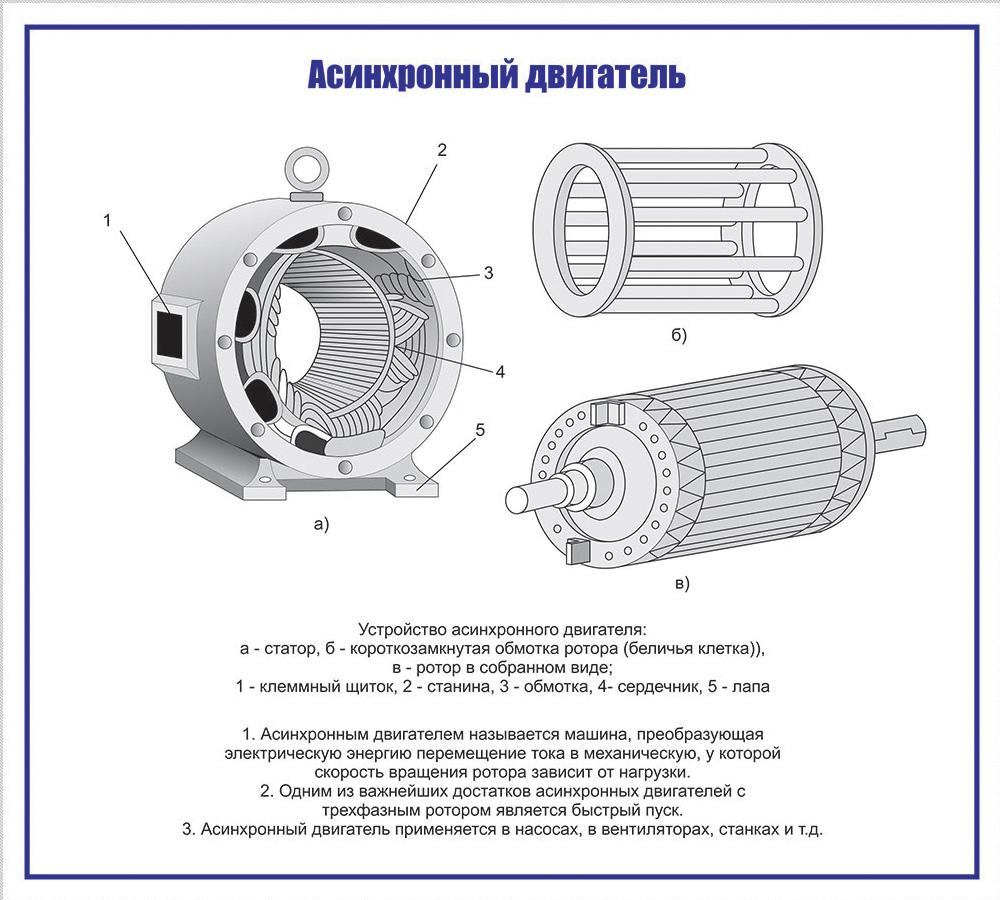 Для увеличения картинки нажмите на неё.
Для увеличения картинки нажмите на неё.
Для того чтобы прекратить работу электродвигателя, достаточно всего лишь нажать на кнопку SB1. Этим действием мы разрываем цепь управления и прекращается подача напряжения на катушку пускателя, и силовые контакты размыкаются и как следствие пропадает напряжение на обмотках статора, и он останавливается. Останавливать так же легко, как и запускать.
Вот в принципе и вся схема пуска асинхронного двигателя. Если статья вам чем то помогла, то поделитесь нею в соц. сетях, а так же подпишитесь на обновления блога.
С уважением Семак Александр!
Читайте также статьи:
Принципиальная схема электрического двигателя
Любой электрический двигатель представляет собой устройство, превращающее электрическую энергию в механическую. Подобно генератору, принципиальная схема электрического двигателя включает в себя статор и ротор, что позволяет отнести его к разряду вращающихся электрических машин.
Устройство двигателя
Применение короткозамкнутого трехфазного асинхронного двигателя сделало его наиболее популярным для большинства машин и механизмов. Обмотка его ротора состоит из системы, объединяющей алюминиевые или медные стержни, расположенные в пазах ротора параллельно между собой. Концы этих стержней соединяются друг с другом при помощи специальных короткозамкнутых колец. Кроме ротора и статора устройство электродвигателя включает в себя вал и корпус.
Обмотка его ротора состоит из системы, объединяющей алюминиевые или медные стержни, расположенные в пазах ротора параллельно между собой. Концы этих стержней соединяются друг с другом при помощи специальных короткозамкнутых колец. Кроме ротора и статора устройство электродвигателя включает в себя вал и корпус.
Регулирование скорости вращения производится ступенчатым способом, при помощи статорной обмотки, где количество полюсов может переключаться. Этот принцип используется в асинхронных двигателях с различным количеством скоростей. Плавное регулирование скорости осуществляется с помощью регулируемого преобразователя частоты, подающего питание к электродвигателю.
Основными положительными характеристиками короткозамкнутых асинхронных электродвигателей являются их высокая надежность, незначительная масса, компактность, более высокий срок службы, чем у двигателей внутреннего сгорания аналогичной мощности. Изготовление таких электродвигателей производится в очень широком диапазоне мощностей, где номинал устройства может составлять всего лишь несколько ватт, а может иметь мощность и в десятки мегаватт. Электродвигатели малой мощности, чаще всего, выпускаются однофазными.
Электродвигатели малой мощности, чаще всего, выпускаются однофазными.
Особенности электрических двигателей
Устройство синхронных электродвигателей очень напоминает синхронный генератор. Таким образом, принципиальная схема электрического двигателя данной модификации, отличается от асинхронных моделей. При одинаковой частоте электрического тока в сети, скорость их вращения остается постоянной, вне зависимости от нагрузки. В отличие от асинхронных, у этих моделей не происходит потребления из сети реактивной энергии. Эта энергия отдается в сеть, таким образом, перекрывая реактивную энергию, потребляемую другими источниками.
Применение синхронных электродвигателей не допускает частых пусков, поэтому, как правило, их используют в условиях относительно неизменной нагрузки, при необходимости обеспечения постоянной скорости вращения.
Следует отдельно отметить двигатели постоянного тока, используемые в условиях необходимости плавного регулирования скоростей. Эти действия производятся с помощью изменяемого тока в якоре или с применением устройств на полупроводниках. Однако, такие двигатели стали применяться все реже из-за их больших размеров, высокой стоимости и значительных потерь в процессе эксплуатации.
Однако, такие двигатели стали применяться все реже из-за их больших размеров, высокой стоимости и значительных потерь в процессе эксплуатации.
Схема подключения двигателя по реверсивной схеме
Схема замещения асинхронного двигателя
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2‘(1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн.
В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн.
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.
Более удобной при практических расчетах является Г-образная схема замещения.
В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.
Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Параметры схемы замещения рассматриваются подробнее в статье векторная диаграмма асинхронного двигателя
Звезда или треугольник. Оптимальное подключение асинхронного электродвигателя | RuAut
Двигатели асинхронного типа имеют целый набор безусловных достоинств. Среди плюсов асинхронных двигателей в первую очередь хочется назвать высокую производительность и надежность их эксплуатации, совсем небольшую стоимость и неприхотливость ремонта и обслуживания двигателя, а также способность переносить достаточно высокие перегрузки механического типа. Все эти достоинства, которыми обладают асинхронные двигатели, обусловлена тем, что данный тип двигателей имеет очень простую конструкцию. Но, не смотря на большое число достоинств, асинхронным двигателям присущи и их определенные отрицательные моменты.
Но, не смотря на большое число достоинств, асинхронным двигателям присущи и их определенные отрицательные моменты.
В практической работе принято использовать два основных способа подключения трёхфазных электродвигателей к электросети. Эти способы подключения носят названия: «подключение методом звезды» и «подключение методом треугольника».
Когда выполняется соединение трёхфазного электродвигателя по типу подключения «звезда», тогда соединение концов обмоток статора электродвигателя происходит в одной точке. При этом трехфазное напряжение подают на начала обмоток. Ниже, на рисунке 1, наглядно проиллюстрирована схема подключения асинхронного двигателя «звездой».
Когда выполняется соединение трёхфазного электродвигателя по типу подключения «треугольник», тогда обмотки статора электродвигателя присоединяются последовательно друг за другом. При этом начало последующей обмотки соединяется с концом предыдущей обмотки и так далее. Ниже, на рисунке 2, наглядно проиллюстрирована схема подключения асинхронного двигателя «треугольником».
Если не вдаваться в теоретические и технические основы электротехники, то можно принять на веру тот факт, что работа тех электродвигателей, у которых обмотки подключены по схеме «звезда», является более мягкой и плавной, чем у электродвигателей, обмотки которых соединены по схеме «треугольник». Но тут же стоит обратить внимание на ту особенность, что электродвигатели, обмотки которых подключены по схеме «звезда», не способны развить полную мощность, заявленную в паспортных характеристиках. В том случае, если соединение обмоток выполнено по схеме «треугольник», то электродвигатель работает на максимальную мощность, которая заявлена в техническом паспорте, но при этом имеют место быть очень высокие значения пусковых токов. Если произвести сравнение по мощности, то электродвигатели, чьи обмотки будут соединены по схеме «треугольник», способны выдавать мощность в полтора раза выше, чем те электродвигатели, обмотки которых подключены по схеме «звезда».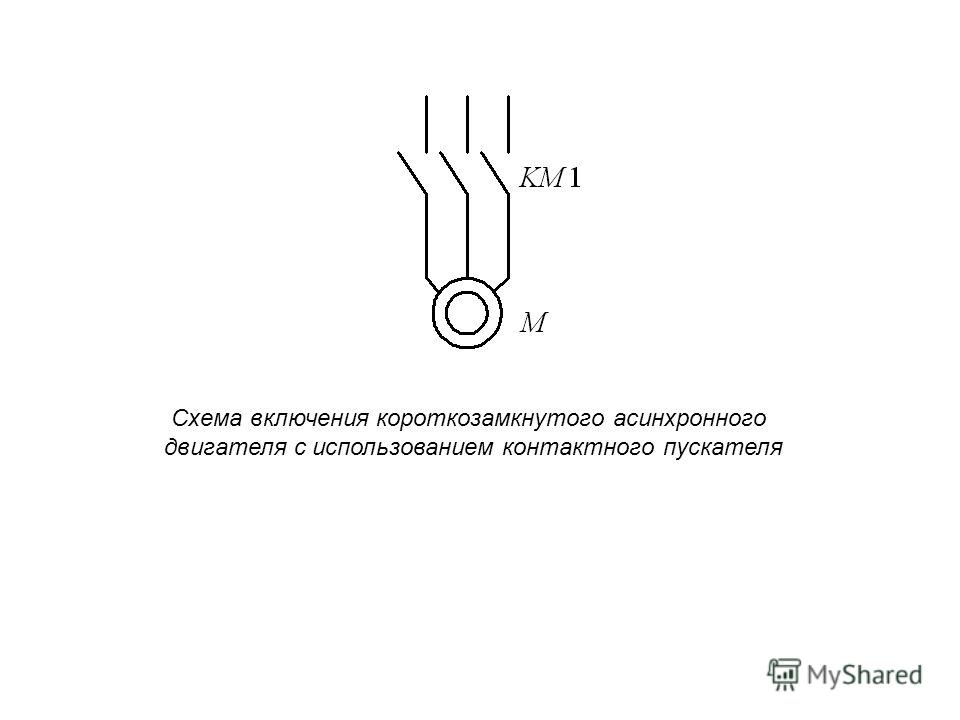
Основываясь на всем вышеописанном, для того, чтобы снизить токи при запуске, целесообразно применять подключение обмоток по комбинированной схеме «треугольник-звезда». Особенно такой тип подключения актуален для электродвигателей, обладающих большей мощностью. Таким образом, в связи с соединением по схеме «треугольник- звезда» изначально запуск выполняется по схеме «звезда», а после того, как электродвигатель «набрал обороты», выполняется переключение в автоматическом режиме по схеме «треугольник».
Схема управления электродвигателем представлена на рисунке 3.
Рис. 3 Схема управления
Еще один вариант схемы управления электродвигателем заключается в следующем (рис. 4).
Рис. 4 Схема управления двигателем
На контакт NC (нормально закрытый) реле времени K1, а также на контакт NC реле K2, в цепи катушки пускателя КЗ, подаётся напряжение питания.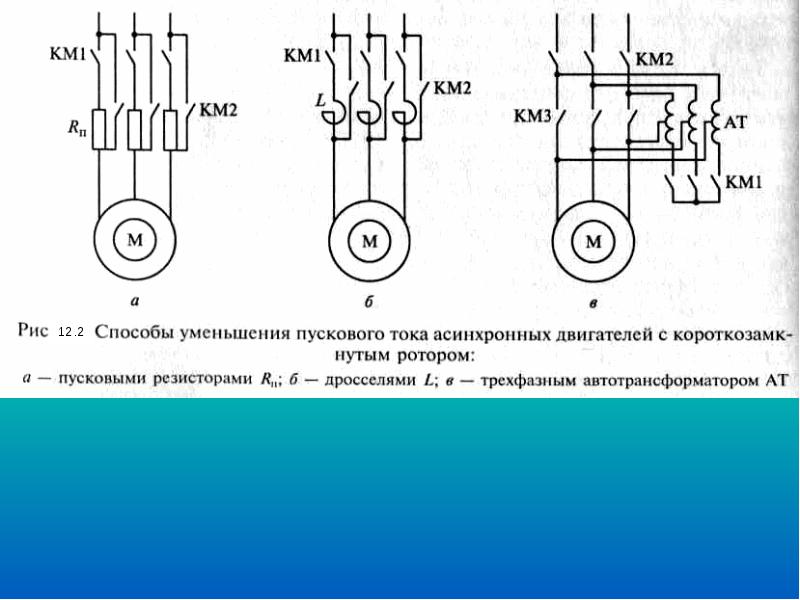
После того, как произойдет включение пускателя КЗ, нормально закрытыми контактами КЗ расцепляются цепи катушки пускателя K2 (запрет случайного включения). Контакт КЗ в цепи питания катушки пускателя K1 замыкается.
Когда запускается магнитный пускатель K1, в цепи питания его катушки замыкаются контакты K1. Реле времени включается в то же самое время, контакт этого реле K1 в цепи катушки пускателя КЗ размыкается. А в цепи катушки пускателя K2 – замыкается.
При отключении обмотки пускателя КЗ, замкнётся контакт КЗ в цепи катушки пускателя K2. После того, как пускатель K2 включится, он размыкает своими контактами K2 цепь питания катушки пускателя КЗ.
Трёхфазное напряжение питания подаётся на начало каждой из обмоток W1, U1 и V1 с помощью силовых контактов пускателя K1. Когда срабатывает магнитный пускатель КЗ, тогда при помощи его контактов КЗ выполняется замыкание, посредством которого между собой соединяются концы каждой из обмоток электродвигателя W2, V2 и U2. Таким образом, выполняется подключение обмоток электродвигателя по схеме соединения «звезда».
Таким образом, выполняется подключение обмоток электродвигателя по схеме соединения «звезда».
Реле времени, объединенное с магнитным пускателем K1, сработает спустя определенное время,. При этом происходит отключение магнитного пускателя КЗ и одновременное включение магнитного пускателя K2. Таким образом силовые контакты пускателя K2 замкнутся и напряжение питания будет подано на концы каждой из обмоток U2, W2 и V2 электродвигателя. Иными словами, электродвигатель включается по схеме подключения «треугольник».
Для того, чтобы электродвигатель запустить по схеме соединения «треугольник-звезда», различные изготовители производят специальные пусковые реле. Данные реле могут носить разнообразные названия, например, реле «старт-дельта» или «пусковое реле времени», а также и некоторые другие. Но назначение всех этих реле заключается в одном и том же.
Типовая схема, выполненная с реле времени, предназначенном для запуска, то есть реле «треугольник-звезда», для осуществления управления запуска трехфазного электродвигателя асинхронного типа представлена на рисунке 5.
Рис.5 Типовая схема с пусковым реле времени (реле «звезда/треугольник») для управления запуском трехфазного асинхронного двигателя.
Итак, подытожим все вышеописанное. Для того, чтобы понизить пусковые токи осуществлять запуск электродвигателя требуется в определенной последовательности, а именно:
- сперва электродвигатель запускают на пониженных оборотах соединённым по схеме «звезда»;
- затем электродвигатель соединяют по схеме «треугольник».
Первоначальный запуск по схеме «треугольник» создаст максимальный момент, а последующее соединение по схеме «звезда» (для которой в 2 раза меньше пусковой момент) с продолжением работы в номинальном режиме, когда двигатель «набрал обороты», произойдёт переключение на схему соединения «треугольник» в автоматическом режиме. Но не стоит забывать о том, какая нагрузка создается перед запуском на валу, так как вращающий момент при соединении по схеме «звезда» ослаблен. По этой причине маловероятно, что данный метод запуска будет приемлем для электродвигателей с высокой нагрузкой, так как они в таком случае могут потерять свою работоспособность.
По этой причине маловероятно, что данный метод запуска будет приемлем для электродвигателей с высокой нагрузкой, так как они в таком случае могут потерять свою работоспособность.
1. Подключение асинхронного двигателя в однофазную сеть
Применение конденсаторов в асинхронных двигателях
рабочий | пусковой | |
применение | В схемах асинхронных электродвигателей | В схемах асинхронных электродвигателей |
тип подключения | Последовательно со вспомогательной обмоткой электродвигателя | Параллельно рабочему конденсатору |
в качестве | Является фазосмещающим элементом | Является фазосмещающим элементом |
назначение | Позволяет получить круговое вращающееся магнитное поле, необходимое для работы электродвигателя | Позволяет получить магнитное поле, необходимое для повышения пускового момента электродвигателя |
время включения | В процессе работы электродвигателя | В момент пуска электродвигателя |
Существуют две основные области применения конденсаторов для асинхронных электродвигателей.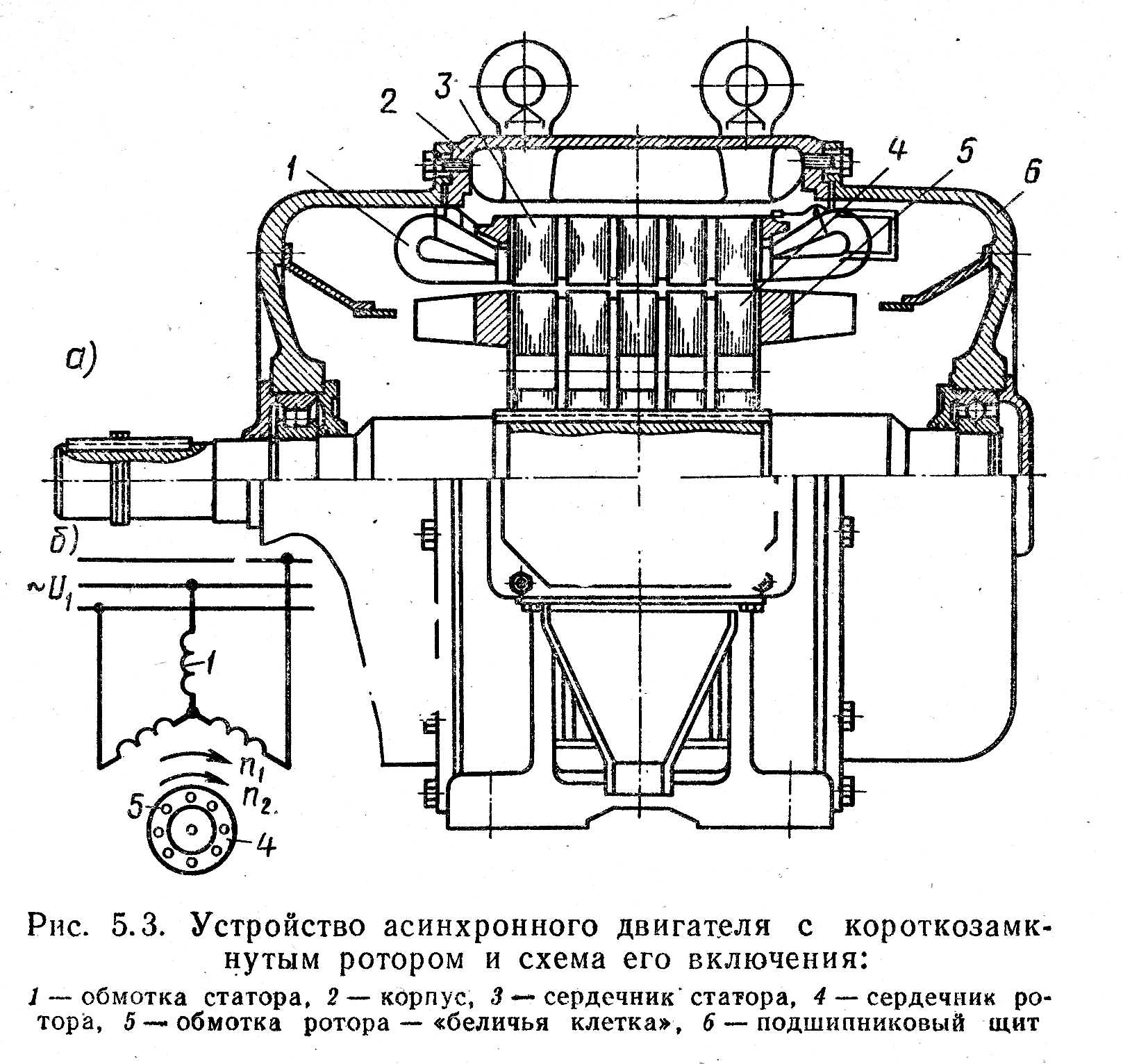
1) Трёхфазный асинхронный электродвигатель, включаемый через конденсатор в однофазную сеть
В случае, когда трехфазный электродвигатель необходимо подключить к однофазной сети, существует два возможных варианта подключения: «звезда» или «треугольник», причем наиболее предпочтительным во многих случаях является вариант «треугольник».
Приблизительный расчет для данного типа соединения производится по следующей формуле:
Сраб.=k*Iф/Uсети
где:
k – коэффициент, зависящий от соединения обмоток.
Для схемы соединения «Звезда» — k=2800
Для схемы соединения «Треугольник» — k=4800
Iф – номинальный фазный ток электродвигателя, А.
Uсети – напряжение однофазной сети, В.
Для определения пусковой емкости Сп. исходят из пускового момента. В случае если пуск двигателя происходит без нагрузки, пусковая емкость не требуется.
исходят из пускового момента. В случае если пуск двигателя происходит без нагрузки, пусковая емкость не требуется.
Для получения пускового момента, близкого к номинальному, достаточно иметь пусковую емкость, определяемую соотношением Сп.=(2.5-3) Ср.
Рабочее напряжение конденсаторов должно быть в 1,5 раза выше напряжения сети.
Схема подключения
| Рис 1. Схема включения в однофазную сеть трехфазного асинхронного двигателя с обмотками статора, соединенными по схеме «звезда» (а) или «треугольник» (б):
|
2) Асинхронный электродвигатель, питаемый от однофазной сети и имеющий на статоре две обмотки, одна из которых включается в сеть непосредственно, а другая — последовательно с электрическим конденсатором для образования вращающегося магнитного поля. Конденсаторы создают сдвиг фаз между токами обмоток, оси которых сдвинуты в пространстве. Наибольший вращающий момент развивается, когда сдвиг фаз токов составляет 90°, а их амплитуды подобраны так, что вращающееся поле становится круговым. При пуске конденсаторного асинхронного двигателя оба конденсатора включены, а после его разгона один из конденсаторов отключают. Это обусловлено тем, что при номинальной частоте вращения требуется значительно меньшая емкость, чем при пуске.
Схема подключения
| Рис 2.
|
 Схема (а) и векторная диаграмма конденсаторного асинхронного двигателя:
Схема (а) и векторная диаграмма конденсаторного асинхронного двигателя:
Конденсаторный асинхронный электродвигатель по пусковым и рабочим характеристикам близок к трехфазному асинхронному двигателю.
Многоскоростные электродвигатели | двухскоростные | трехскоростные
Электродвигатели многоскоростные
Многоскоростные электродвигатели изготавливаются на базе основного исполнения односкоростных двигателей и подразделяются на:
- двухскоростные с отношением числа оборотов 1500/3000 (4/2 — число полюсов), 1000/1500 (6/4), 750/1500 (8/4), 750/1000 (8/6), 500/1000 (12/6)
- трехскоростные — 1000/1500/3000 (6/4/2), 750/1500/3000 (8/4/2), 750/1000/1500 (8/6/4)
- четырехскоростные — 500/750/1000/1500 (12/8/6/4)
Схемы подключения двухскоростных электродвигателей отличаются в зависимости от соотношения числа оборотов.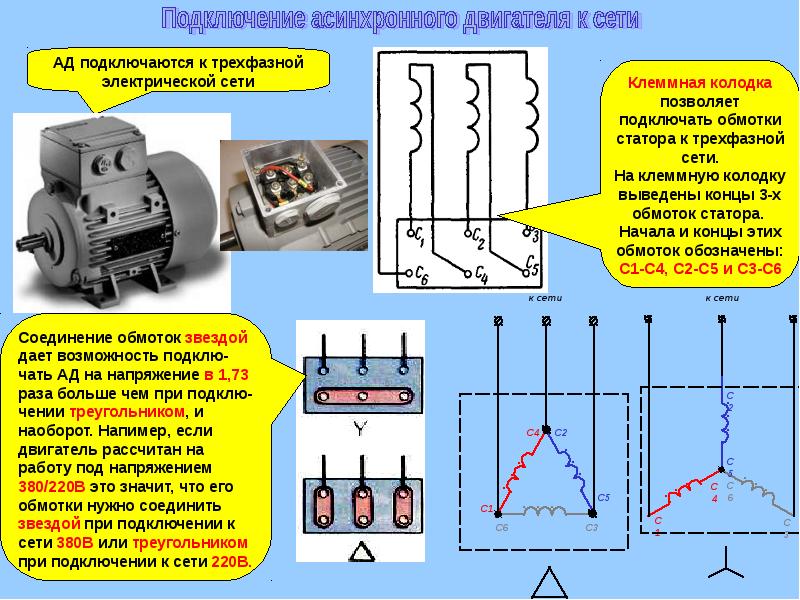
При соотношении 1/2, т.е — 1500/3000, 750/1500 и 500/1000 применяется следующая схема:
При соотношении 2/3 и 3/4, т.е -1000/1500, 750/1000 применяется другая схема:
Схема подключения трехскоростных электродвигателей:
Схема подключения четырехскоростных электродвигателей:
Основные технические характеристики двухскоростных двигателей
| Марка |
Мощн. кВт |
Об/мин | Ток, А |
Момент Н*м |
Iп/Iн |
Момент инерции кгм2 |
Масса кг |
| 1500/3000 об/мин | |||||||
| АИР132S4/2 | 6 | 1455 | 12,5 | 39,4 | 7 | 0,032 | 70 |
| 7,1 | 2900 | 14,6 | 23,4 | 7 | |||
| АИР132М4/2 | 8,5 | 1455 | 17,3 | 55,8 | 7,5 | 0,045 | 83,5 |
| 9,5 | 2925 | 19,1 | 31 | 8,5 | |||
| АИР180S4/2 | 17 | 1470 | 34,5 | 110 | 6,7 | 0,16 | 170 |
| 20 | 2930 | 39,3 | 65,2 | 6,4 | |||
| АИР180М4/2 | 22 | 1470 | 43,7 | 143 | 7,5 | 0,2 | 190 |
| 26 | 2935 | 50,5 | 84,6 | 7,5 | |||
| 5А200М4/2 | 27 | 1475 | 53,4 | 175 | 7,4 | 0,27 | 245 |
| 35 | 2945 | 64,9 | 114 | 7,2 | |||
| 5А200L4/2 | 30 | 1470 | 57,6 | 195 | 7 | 0,32 | 270 |
| 38 | 2945 | 67,8 | 123 | 7 | |||
| 5А225М4/2 | 42 | 1480 | 81,7 | 271 | 7 | 0,5 | 345 |
| 48 | 2960 | 87,6 | 155 | 7,5 | |||
| 5АМ250S4/2 | 55 | 1485 | 102 | 354 | 7,3 | 1,2 | 485 |
| 60 | 2975 | 114 | 193 | 7,8 | |||
| 5АМ250М4/2 | 66 | 1485 | 121 | 424 | 7,2 | 1,7 | 520 |
| 80 | 2970 | 148 | 257 | 7,2 | |||
| 1000/1500 об/мин | |||||||
| АИР132S6/4 | 5 | 965 | 12 | 49,5 | 5,6 | 0,053 | 68,5 |
| 5,5 | 1435 | 11,1 | 36,6 | 5,7 | |||
| АИР132М6/4 | 6,7 | 970 | 16 | 66 | 6,2 | 0,074 | 81,5 |
| 7,5 | 1440 | 14,7 | 49,7 | 6,2 | |||
| АИР180М6/4 | 15 | 975 | 33,6 | 147 | 6,6 | 0,27 | 180 |
| 17 | 1450 | 33 | 112 | 6 | |||
| 5А200М6/4 | 20 | 980 | 44 | 195 | 6,5 | 0,41 | 245 |
| 22 | 1460 | 42,2 | 144 | 6 | |||
| 5А200L6/4 | 24 | 980 | 55,2 | 234 | 6,9 | 0,46 | 265 |
| 27 | 1480 | 51,5 | 174 | 6,5 | |||
| 500/1000 об/мин | |||||||
| АИР180М12/6 | 7 | 485 | 22,4 | 138 | 4,5 | 0,27 | 200 |
| 13 | 975 | 25,9 | 127 | 6 | |||
| 5А200М12/6 | 8 | 485 | 30,6 | 158 | 4 | 0,41 | 245 |
| 15 | 980 | 30,1 | 146 | 6 | |||
| 5А200L12/6 | 10 | 485 | 31,1 | 197 | 4 | 0,46 | 265 |
| 18,5 | 975 | 36,3 | 181 | 6 | |||
| 5А225М12/6 | 14 | 485 | 43,9 | 276 | 4 | 0,65 | 320 |
| 25 | 980 | 48,5 | 244 | 6 | |||
| 5АМ250S12/6 | 16 | 495 | 56,5 | 309 | 4,4 | 1,2 | 435 |
| 30 | 990 | 58,3 | 289 | 6,6 | |||
| 5АМ250М12/6 | 18,5 | 490 | 60,1 | 361 | 4 | 1,4 | 455 |
| 36 | 985 | 71,1 | 349 | 5,3 | |||
| 750/1500 об/мин | |||||||
| АИР132S8/4 | 3,6 | 715 | 9,7 | 48,1 | 4,8 | 0,053 | 68,5 |
| 5 | 1435 | 10,3 | 33,3 | 5,9 | |||
| АИР132М8/4 | 4,7 | 715 | 12,4 | 62,8 | 5 | 0,074 | 82 |
| 7,5 | 1440 | 15,8 | 49,7 | 6,4 | |||
| АИР180М8/4 | 13 | 730 | 33,6 | 170 | 5,5 | 0,27 | 180 |
| 18,5 | 1465 | 35,9 | 121 | 6,7 | |||
| 5А200М8/4 | 15 | 730 | 40,2 | 196 | 5,3 | 0,41 | 245 |
| 22 | 1460 | 42,2 | 144 | 6,4 | |||
| 5А200L8/4 | 17 | 725 | 39 | 224 | 5 | 0,46 | 275 |
| 24 | 1450 | 45,5 | 158 | 5,5 | |||
| 5А225М8/4 | 23 | 735 | 55,3 | 299 | 5,5 | 0,7 | 330 |
| 34 | 1475 | 62,7 | 220 | 6,5 | |||
| 5АМ250S8/4 | 33 | 740 | 75,3 | 426 | 5,3 | 1,2 | 435 |
| 47 | 1480 | 87,2 | 303 | 6,4 | |||
| 5АМ250М8/4 | 37 | 740 | 81,5 | 478 | 6 | 1,4 | 465 |
| 55 | 1480 | 99,8 | 355 | 7 | |||
| 750/1000 об/мин | |||||||
| АИР132S8/6 | 3,2 | 725 | 8,7 | 42,2 | 4,6 | 0,053 | 68,5 |
| 4 | 965 | 9,1 | 39,6 | 5 | |||
| АИР132М8/6 | 4,5 | 720 | 11,9 | 59,7 | 5,4 | 0,074 | 81,5 |
| 5,5 | 970 | 12,3 | 54,1 | 6 | |||
| АИР180М8/6 | 11 | 730 | 26,3 | 144 | 5,3 | 0,27 | 180 |
| 15 | 970 | 30,1 | 148 | 6 | |||
| 5А200М8/6 | 15 | 730 | 35,4 | 196 | 5,5 | 0,41 | 245 |
| 18,5 | 975 | 37,2 | 181 | 6 | |||
| 5А200L8/6 | 18,5 | 730 | 43,6 | 242 | 5,5 | 0,46 | 265 |
| 23 | 975 | 46,2 | 225 | 6 | |||
| 5А225М8/6 | 22 | 740 | 51,7 | 284 | 6 | 0,7 | 330 |
| 30 | 985 | 58,6 | 291 | 6 | |||
| 5АМ250S8/6 | 30 | 740 | 70,8 | 387 | 6 | 1,2 | 435 |
| 37 | 990 | 73,2 | 357 | 6,4 | |||
| 5АМ250М8/6 | 42 | 740 | 93,2 | 542 | 5,5 | 1,4 | 485 |
| 50 | 985 | 96,6 | 485 | 6,1 | |||
Основные технические характеристики трехскоростных двигателей
| Марка |
Мощность кВт |
Об/мин |
Ток А |
Момент Н*м |
Iп/Iн |
Момент инерц.  кгм2 |
Вес кг |
| 1000/1500/3000 об/мин | |||||||
| АИР132S6/4/2 | 2,8 | 955 | 7,6 | 28 | 5 | 0,053 | 70 |
| 4 | 1440 | 8,9 | 26,5 | 5 | |||
| 4,5 | 2895 | 9,7 | 14,8 | 6,3 | |||
| АИР132М6/4/2 | 3,8 | 955 | 10,1 | 38 | 5,5 | 0,074 | 83,5 |
| 5,3 | 1440 | 11,3 | 35,1 | 6,5 | |||
| 6,3 | 2895 | 13 | 20,8 | 7 | |||
| 750/1500/3000 об/мин | |||||||
| АИР132S8/4/2 | 1,8 | 710 | 6,1 | 24,2 | 4 | 0,053 | 70 |
| 3,4 | 1440 | 7,5 | 22,5 | 6 | |||
| 4 | 2895 | 8,6 | 13,2 | 6,5 | |||
| АИР132М8/4/2 | 2,4 | 710 | 8,5 | 32,3 | 4,5 | 0,074 | 83,5 |
| 4,5 | 1440 | 9,8 | 29,8 | 6,3 | |||
| 5,6 | 2895 | 11,7 | 18,5 | 6,7 | |||
| 750/1000/1500 об/мин | |||||||
| АИР132S8/6/4 | 1,9 | 710 | 6,4 | 25,5 | 4 | 0,053 | 68,5 |
| 2,4 | 950 | 6,1 | 24,1 | 4,4 | |||
| 3,4 | 1410 | 7,7 | 23 | 4,6 | |||
| АИР132М8/6/4 | 2,8 | 720 | 9,4 | 37,1 | 4,5 | 0,074 | 81,5 |
| 3 | 960 | 7,7 | 29,8 | 5 | |||
| 5 | 1425 | 10,7 | 33,5 | 5,2 | |||
| АИР180М8/6/4 | 8 | 740 | 22,9 | 103 | 5,4 | 0,27 | 180 |
| 11 | 975 | 24,3 | 108 | 6,1 | |||
| 12,5 | 1475 | 27 | 80,9 | 6,5 | |||
| 5А200М8/6/4 | 10 | 740 | 30,3 | 129 | 5,5 | 0,41 | 245 |
| 12 | 985 | 27 | 116 | 6 | |||
| 17 | 1475 | 36 | 110 | 6,5 | |||
| 5А200L8/6/4 | 12 | 735 | 31,6 | 156 | 5,3 | 0,46 | 270 |
| 15 | 985 | 31,9 | 145 | 6 | |||
| 20 | 1475 | 39,9 | 130 | 6,5 | |||
| 5А225М8/6/4 | 15 | 740 | 38,9 | 194 | 5,5 | 0,7 | 330 |
| 17 | 985 | 34,9 | 165 | 6,5 | |||
| 25 | 1480 | 48 | 160 | 6,3 | |||
| 5АМ250S8/6/4 | 22 | 740 | 52 | 284 | 5,7 | 1,2 | 435 |
| 25 | 990 | 51,1 | 241 | 7,6 | |||
| 33 | 1485 | 62,2 | 212 | 7 | |||
| 5АМ250М8/6/4 | 24 | 740 | 56,8 | 310 | 5,7 | 1,4 | 465 |
| 33 | 990 | 65,6 | 318 | 7,4 | |||
| 38 | 1485 | 71,7 | 244 | 6,8 | |||
Основные технические характеристики четырехскоростных двигателей
| Марка |
Мощность кВт |
Об/мин |
Ток А |
Момент Н*м |
Iп/Iн |
Момент инерц.  кгм2 кгм2 |
Вес кг |
| 500/750/1000/1500 об/мин | |||||||
| АИР180М12/8/6/4 | 3 | 485 | 12,7 | 59,1 | 4,1 | 0,27 | 180 |
| 5 | 730 | 15,5 | 72 | 4,8 | |||
| 6 | 965 | 12,7 | 59,4 | 4,8 | |||
| 9 | 1465 | 18,6 | 58,7 | 6 | |||
| 5А200М12/8/6/4 | 4,5 | 490 | 16,8 | 87,7 | 3,5 | 0,41 | 245 |
| 8 | 735 | 20,5 | 104 | 4,5 | |||
| 9 | 980 | 18,9 | 87,7 | 5 | |||
| 12 | 1470 | 23,3 | 78 | 5,1 | |||
| 5А200L12/8/6/4 | 5 | 490 | 18,1 | 97,4 | 4 | 0,46 | 270 |
| 9 | 735 | 23,8 | 123 | 5 | |||
| 11 | 980 | 23,5 | 107 | 4,5 | |||
| 15 | 1470 | 29,5 | 97 | 5 | |||
| 5А225М12/8/6/4 | 7,1 | 490 | 26,4 | 138 | 4,5 | 0,7 | 325 |
| 13 | 740 | 36,6 | 168 | 6 | |||
| 14 | 985 | 28,4 | 136 | 6 | |||
| 20 | 1490 | 38,4 | 128 | 7,3 | |||
| 5АМ250S12/8/6/4 | 9 | 495 | 32,5 | 174 | 4,7 | 1,2 | 435 |
| 17 | 745 | 43,5 | 218 | 5,9 | |||
| 18,5 | 990 | 37,1 | 179 | 5,9 | |||
| 27 | 1485 | 52,4 | 173 | 7 | |||
| 5АМ250М12/8/6/4 | 12 | 495 | 42,2 | 232 | 4,8 | 1,4 | 465 |
| 21 | 745 | 51,7 | 269 | 6,1 | |||
| 24 | 990 | 47,6 | 232 | 6,6 | |||
| 30 | 1490 | 57,5 | 192 | 7,8 | |||
Цены на многоскоростные эл-двигатели составлют +(40-60)% к цене базового исполнения
Схема, эквивалентнаяасинхронного двигателя — цепь ротора и статора
Эквивалентная схема асинхронного двигателя обеспечивает рабочие характеристики, которые оцениваются для установившихся условий.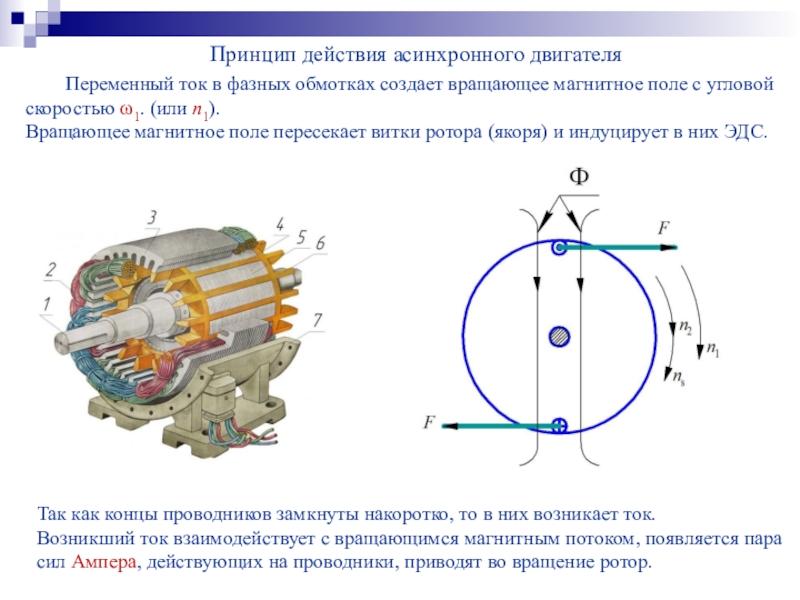 Асинхронный двигатель основан на принципе индукции напряжений и токов. Напряжение и ток индуцируются в цепи ротора из цепи статора для работы. Эквивалентная схема асинхронного двигателя аналогична схеме замещения трансформатора.
Асинхронный двигатель основан на принципе индукции напряжений и токов. Напряжение и ток индуцируются в цепи ротора из цепи статора для работы. Эквивалентная схема асинхронного двигателя аналогична схеме замещения трансформатора.
Состав:
Модель цепи статораМодель цепи статора асинхронного двигателя состоит из сопротивления фазной обмотки статора R 1 , реактивного сопротивления утечки фазы статора X 1 , как показано на принципиальной схеме ниже:
Ток холостого хода I 0 моделируется чисто индуктивным реактором X 0 с намагничивающей составляющей I µ и неиндуктивным резистором R 0 , несущим ток потерь в сердечнике I ω .Таким образом,
Полный ток намагничивания I 0 в случае асинхронного двигателя значительно больше, чем у трансформатора. Это связано с более высоким сопротивлением, вызванным воздушным зазором асинхронного двигателя.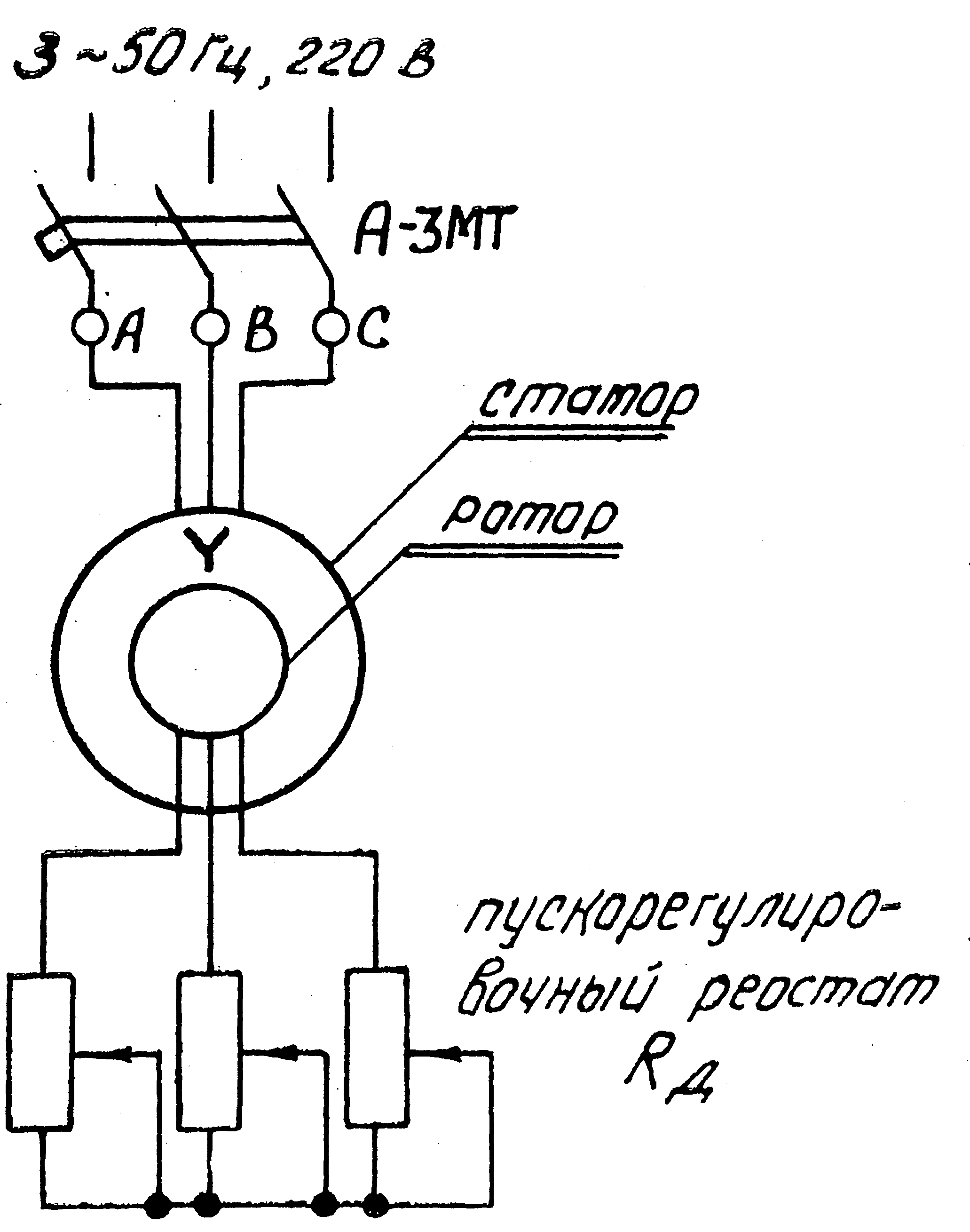 Как мы знаем, в трансформаторе ток холостого хода варьируется от 2 до 5% номинального тока, тогда как в асинхронном двигателе ток холостого хода составляет примерно 25-40% номинального тока в зависимости от от размера мотора.Значение намагничивающего реактивного сопротивления X 0 также очень мало в асинхронном двигателе.
Как мы знаем, в трансформаторе ток холостого хода варьируется от 2 до 5% номинального тока, тогда как в асинхронном двигателе ток холостого хода составляет примерно 25-40% номинального тока в зависимости от от размера мотора.Значение намагничивающего реактивного сопротивления X 0 также очень мало в асинхронном двигателе.
Модель цепи ротора
Когда на обмотки статора подается трехфазное питание, в обмотках ротора машины индуцируется напряжение. Чем больше будет относительное движение ротора и магнитных полей статора, тем больше будет результирующее напряжение ротора. Наибольшее относительное движение происходит в состоянии покоя. Это состояние также известно как состояние заблокированного ротора или заблокированного ротора.Если индуцированное напряжение ротора в этом состоянии составляет E 20 , тогда индуцированное напряжение при любом скольжении определяется уравнением, показанным ниже:
Сопротивление ротора постоянно и не зависит от скольжения.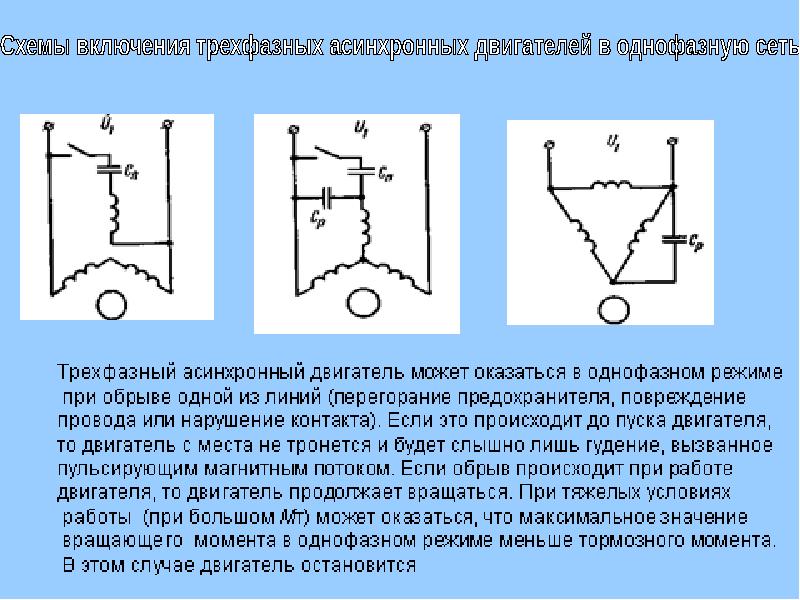 Реактивное сопротивление асинхронного двигателя зависит от индуктивности ротора и частоты напряжения и тока в роторе.
Реактивное сопротивление асинхронного двигателя зависит от индуктивности ротора и частоты напряжения и тока в роторе.
Если L 2 — индуктивность ротора, реактивное сопротивление ротора определяется уравнением, показанным ниже:
Но, как известно,
Следовательно,
Где X 20 — реактивное сопротивление ротора в состоянии покоя.
Схема ротора показана ниже:
Импеданс ротора определяется уравнением ниже:
Ток ротора по фазе определяется уравнением, показанным ниже:
Здесь I 2 — ток частоты скольжения, создаваемый напряжением sE 20 , индуцированным частотой скольжения, действующим в цепи ротора, имеющим полное сопротивление на фазу (R 2 + jsX 20 ).
Теперь, разделив уравнение (5) на промах s, мы получим следующее уравнение:
R 2 — это постоянное сопротивление и переменное реактивное сопротивление утечки sX 20 .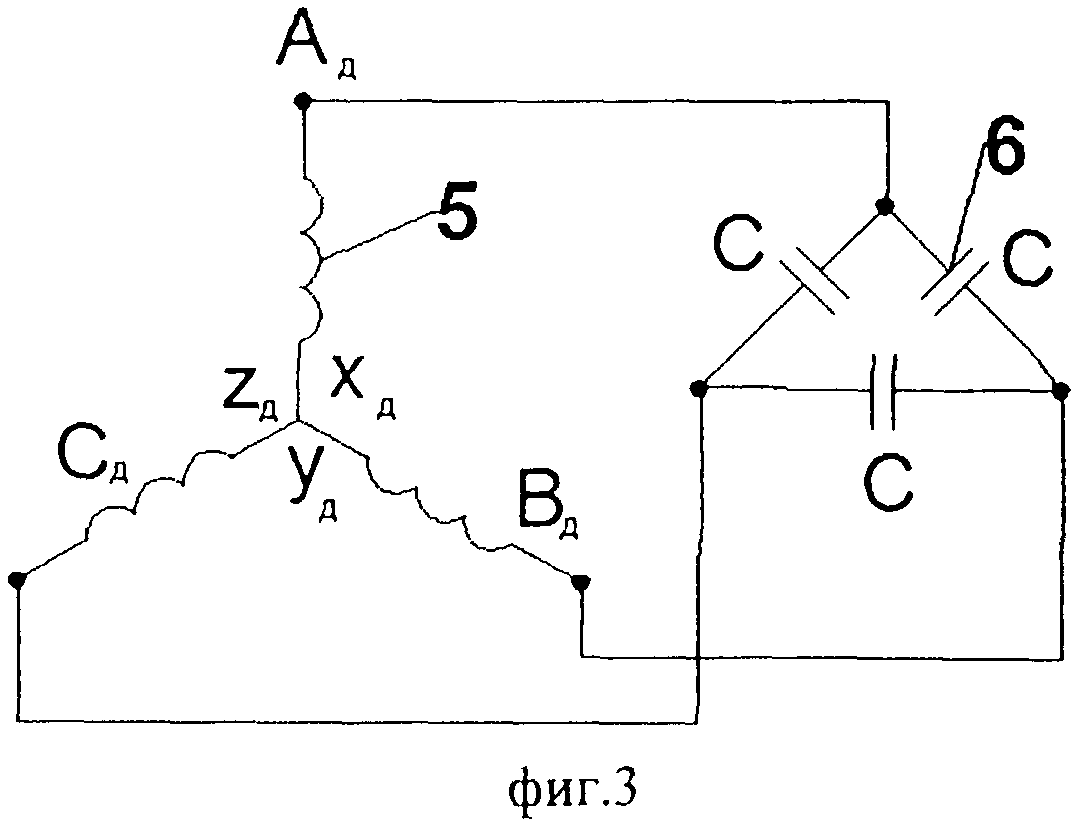 Аналогично, схема ротора, показанная ниже, имеет постоянное реактивное сопротивление рассеяния X 20 и переменное сопротивление R 2 / с.
Аналогично, схема ротора, показанная ниже, имеет постоянное реактивное сопротивление рассеяния X 20 и переменное сопротивление R 2 / с.
Уравнение (6) выше объясняет вторичную цепь воображаемого трансформатора с постоянным соотношением напряжений и одинаковой частотой на обеих сторонах. Этот воображаемый неподвижный ротор проводит тот же ток, что и действительный вращающийся ротор. Это позволяет передавать полное сопротивление вторичного ротора на сторону первичного статора.
Примерная эквивалентная схема асинхронного двигателя
Эквивалентная схема дополнительно упрощается путем смещения ветвей полного сопротивления шунта R 0 и X 0 на входные клеммы, как показано на принципиальной схеме ниже:
Примерная схема основана на предположении, что V 1 = E 1 = E ’ 2 .В приведенной выше схеме единственный компонент, который зависит от скольжения, — это сопротивление. Все остальные количества постоянны. Следующие уравнения могут быть записаны на любом заданном бланке s следующим образом:
Все остальные количества постоянны. Следующие уравнения могут быть записаны на любом заданном бланке s следующим образом:
Импеданс за пределами AA ’определяется как:
Подставляя значение ZAA ’из уравнения (7) в уравнение (8), получаем
Следовательно,
Ток холостого хода I 0 —
Полный ток статора определяется уравнением, показанным ниже:
Общие потери в сердечнике рассчитываются по приведенному ниже уравнению:
Мощность воздушного зазора на фазу определяется как: развиваемый крутящий момент определяется уравнением, приведенным ниже:
Приведенное выше уравнение является уравнением крутящего момента асинхронного двигателя.Приблизительная модель эквивалентной схемы является стандартом для всех расчетов производительности асинхронного двигателя.
Эквивалентная схема асинхронного двигателя
Асинхронный двигатель — это асинхронный двигатель, т. Е. Его скорость изменяется при изменении нагрузки.
 Он всегда работает с запаздывающим коэффициентом мощности. Принцип работы асинхронного двигателя аналогичен трансформатору, т. Е. На электромагнитной индукции.
Он всегда работает с запаздывающим коэффициентом мощности. Принцип работы асинхронного двигателя аналогичен трансформатору, т. Е. На электромагнитной индукции.Эквивалентная схема асинхронного двигателя аналогична эквивалентной схеме трансформатора, потому что энергия, передаваемая от статора к ротору, важна, поскольку работа трансформатора от первичной обмотки ко вторичной.Эквивалентная схема обеспечивает рабочие характеристики асинхронного двигателя. Данные, полученные из эквивалентной схемы, можно использовать для расчета КПД, крутящего момента, потерь, мощности ротора и т. Д. При представлении эквивалентной схемы используются все величины, относящиеся к каждой фазе.
Эквивалентная цепь асинхронного двигателя:
Для разработки эквивалентной схемы асинхронного двигателя используются следующие различные параметры:
- R 1 и X 1 : сопротивление обмотки статора и реактивное сопротивление рассеяния.
- R 2 & X 2 : Сопротивление обмотки ротора и реактивное сопротивление утечки в состоянии покоя (т.
 Е. S = 1).
Е. S = 1). - sX 2 : Реактивное сопротивление утечки ротора при скольжении s (в рабочем состоянии).
- R o : Сопротивление ветви холостого хода, и оно несет рабочую составляющую (I w ) тока холостого хода. I o учитывают потери на холостом ходу.
- X o : Реактивное сопротивление ветви холостого хода и несет намагничивающую составляющую (I µ ) холостого хода для создания магнитного потока.
- E 1 и sE 2 : ЭДС, индуцированная статором, и ЭДС, индуцированная ротором при скольжении s.
 Е. S = 1).
Е. S = 1).Из приведенных выше параметров эквивалентную схему асинхронного двигателя можно составить как
рассмотрим схему собственно ротора двигателя.
Из приведенной выше диаграммы ток ротора I
2 определяется выражением,Здесь мы знаем, что входная мощность ротора, P
2 , представляет собой сумму потерь в меди в роторе P c и развиваемой механической мощности P m .Таким образом, можно представить электрический эквивалент развиваемой механической мощности следующим образом:Чтобы показать эквивалентную механическую нагрузку (преобразование механической энергии) в цепи ротора. Эквивалентная схема двигателя может быть изменена как,
Теперь перенесите параметры со стороны ротора на сторону статора. При смещении параметров стороны ротора в сторону статора мы должны разделить его на значение «K» (где K = отношение эффективного числа оборотов ротора к числу оборотов статора на фазу), за исключением тока ротора, где он умножается на «K».Когда параметры ротора сдвигаются, они могут быть представлены как,
- R ‘ 2 = Сопротивление ротора относительно статора.
- X ‘ 2 = Реактивное сопротивление ротора относительно статора.
- E ‘ 2 = ЭДС, индуцированная ротором. относится к статору.
- I ‘ 2 = ток ротора относительно статора.
- R ‘ L = Механическая нагрузка ротора, эквивалентная статору.
Где,
Таким образом, приблизительная эквивалентная схема получается путем смещения ответвления шунта (состоит из R
01 и X 01 ) к клеммам питания, как показано на рисунке ниже. Это упрощение позволит упростить вычисления.Таким образом, полное сопротивление, относящееся к стороне статора, составляет
Точно так же полное реактивное сопротивление, относящееся к стороне статора, составляет
Расчет мощности ротора и крутящего момента с использованием эквивалентной схемы:
Из эквивалентной схемы мы можем получить выражения для крутящего момента T и выходной мощности ротора P
o двигателя.Из приведенной выше диаграммы мощность, потребляемая P
и ротора, равна,Мы можем написать:
P i = SP i + P i — SP i (добавляя и вычитая SP i )P i = SP i + ( 1 — S) P i
Это выражение показывает, что входная мощность ротора P i является суммой падения напряжения в цепи ротора из-за его сопротивления, как SP и , и эквивалентного сопротивления, представляющего механическую нагрузку. (1 — S) П и .
Исходя из вышеизложенного, мощность ротора P o определяется выражением
Мы знаем, что ток ротора I
2 ,Подставляя значение I
2 в уравнение (1), мы получаемИзвестно, что вращающееся магнитное поле асинхронного двигателя, создаваемое обмоткой статора, вращается с синхронной скоростью N
с . Тогда крутящий момент, приложенный к ротору из-за вращающегося магнитного поля статора, будет T. Теперь мощность, передаваемая от статора к ротору, равна,Приравнивая уравнения (2) и (3), получаем,
Таким образом, уравнение крутящего момента выводится из эквивалентной схемы, и различные расчеты производительности могут быть выполнены из приведенных выше уравнений.
Эквивалентная схема трехфазного асинхронного двигателяТрехфазный асинхронный двигатель работает в некотором роде как трансформатор. В трансформаторе переменное напряжение подается на первичную обмотку, что создает поток переменного тока в сердечнике. Этот магнитный поток связывает вторичную обмотку и индуцирует напряжение той же частоты, но с напряжением, которое зависит от коэффициента трансформации трансформатора.
Трехфазный асинхронный двигатель имеет напряжение, приложенное к статору, которое создает вращающуюся магнитную волну. Когда эта волна проходит по стержням ротора, индуцируются напряжения; однако частота напряжения определяется скольжением двигателя.Оказывается, сходство распространяется и на эквивалентные схемы двух устройств.
Получение эквивалентной схемы трехфазного асинхронного двигателяНа рисунке 1 показана конструкция одной фазы обмотки якоря. Когда на катушку подается напряжение, в обмотке течет ток и устанавливается магнитный поток, как в трансформаторе. На рисунке 1 взаимный поток обозначен сплошными линиями, проходящими через середину ротора, а поток утечки обозначен пунктирными линиями, которые не пересекают воздушный зазор.
Воздушный зазор в двигателе намного больше, чем в трансформаторе, что означает, что сопротивление пути потока будет намного выше. Индуктивность, конечно, обратно пропорциональна сопротивлению, поэтому индуктивность и, следовательно, реактивное сопротивление будут меньше. В результате ток холостого хода (или ток возбуждения) будет значительно выше в процентном отношении для асинхронного двигателя. В то время как ток возбуждения трансформатора составляет всего несколько процентов от номинального тока, ток возбуждения для асинхронного двигателя может составлять 40% или более номинального тока.
РИСУНОК 1 Взаимный поток и поток утечки из-за обмотки статора.
При разработке эквивалентной схемы для асинхронного двигателя можно вспомнить эквивалентную схему трансформатора . Первичная цепь содержала индуктивности для учета утечки и взаимные потоки и сопротивления для учета сопротивления первичной обмотки и потерь в сердечнике. Статор асинхронного двигателя практически такой же; существуют взаимные потоки и потоки утечки, сопротивление обмоток и потери в сердечнике из-за гистерезиса и вихревых токов.
На рисунке 2 показана эквивалентная схема одной фазы статора асинхронного двигателя. Предполагается, что обмотки соединены звездой, поэтому напряжение, приложенное к цепи, представляет собой напряжение между фазой и нейтралью. Элементы R s и X s — это сопротивление обмотки статора и реактивное сопротивление утечки, а X m — реактивное сопротивление намагничивания. Эта схема по сути такая же, как первичная цепь трансформатора. Единственная разница в том, что мы не включили сопротивление потерь в сердечнике.Потери в сердечнике часто учитываются отдельно и поэтому не представлены в эквивалентной схеме.
Если посмотреть на схему статора на Рисунке 2, I 1 — это ток, входящий в обмотку. Как уже говорилось, для установления магнитного поля требуется значительный ток I m . Оставшийся ток, I 2 , является нагрузочной частью тока статора. MMF I 2 точно компенсирует MMF тока ротора. В векторной записи мы можем написать
\ [\ begin {matrix} {{V} _ {1}} \ text {} = \ text {} {{E} _ {1}} \ text {} + \ текст {} {{I} _ {1}} ({{R} _ {s}} \ text {} + j {{X} _ {s}}) & {} & \ left (1 \ right) \ \\ end {matrix} \]
Где E 1 — ЭДС, индуцированная в обмотке статора взаимным потоком.Нам нужно добавить ротор в эквивалентную схему.
РИСУНОК 2 Эквивалентная схема статора асинхронного двигателя.
Глядя на рисунок 3, когда поток статора проходит через проводник ротора, будут индуцироваться напряжение и ток. Если ротор не может вращаться (заблокированный ротор), то напряжение и ток, индуцируемые в роторе, будут иметь ту же частоту, что и статор.
РИСУНОК 3 Индуцирование токов ротора вращающимся магнитным полем статора.
У нас необычная форма трансформатора, в котором магнитный поток вращается вокруг проводников ротора. В случае трансформатора мы относим величины с одной стороны к другой, используя коэффициент трансформации. Поскольку большинство асинхронных двигателей имеют ротор с короткозамкнутым ротором, определить количество оборотов ротора непросто. К счастью, мы можем избежать этой проблемы, всегда работая с величинами, относящимися к статору.
На рисунке 4 показано, что происходит, когда ротор заблокирован. Когда поле статора проходит через проводники ротора, индуцируется напряжение заблокированного ротора E BR (равное E 1 ).Поскольку катушки закорочены, ток протекает через сопротивление и реактивное сопротивление утечки катушек ротора. На рисунке 4 R r — это сопротивление одной фазы обмотки ротора, а X r — реактивное сопротивление утечки ротора, когда в роторе протекают частотные токи статора, что происходит только тогда, когда ротор неподвижен (скольжение = 1.0). Конечно, как R r , так и X r относятся к статору с помощью соответствующего передаточного числа.
РИСУНОК 4 Эквивалентная схема ротора при заблокированном роторе.
Чтобы асинхронный двигатель был нам полезен, он должен вращаться, что означает, что скольжение меньше 1.0. Если ротор движется, происходят две вещи:
- Относительная скорость поля статора и обмотки ротора равна sn s вместо n s . Напомним, что E = Blv. Таким образом, индуцированное в роторе напряжение будет sE
- . Поскольку частота токов ротора равна sf s , реактивное сопротивление рассеяния будет иметь значение sX r .
Замена E 1 на sE 1 и X r на sX r на рисунке 4 дает схему, показанную на рисунке 5, которая действительна при любом значении скольжения.Чтобы подключить схему ротора на рис. 5 к схеме статора на рис. 2, мы должны учитывать разные частоты.
РИСУНОК 5 Цепь ротора на частоте скольжения.
Так же, как мы относили импедансы к соотношению витков, мы можем относить их к частоте. Из схемы на рисунке 5 мы можем записать
\ [\ begin {matrix} \ text {s} {{\ text {E}} _ {\ text {1}}} \ text {+} {{\ text {I}} _ {\ text {2}}} \ text {(} {{\ text {R}} _ {\ text {r}}} \ text {+ js} {{\ text {X}} _ {\ text {r}}} \ text {)} & {} & \ left (2 \ right) \\\ end {matrix} \]
Разделив уравнение 7-8 на s, получим
$ \ begin {matrix } {{E} _ {1}} + {{I} _ {2}} \ left (\ frac {{{R} _ {r}}} {s} + j {{X} _ {r}} \ right) & {} & \ left (3 \ right) \\\ end {matrix} $
Уравнение 3 может быть представлено схемой на Рисунке 6, которая представляет собой эквивалентную схему ротора, относящуюся к статору по отношению к статору. и по частоте.
РИСУНОК 6 Эквивалентная схема ротора относительно частоты статора.
Эту схему можно подключить к эквивалентной схеме статора, но рекомендуется разделить сопротивление на два отдельных компонента. Для удобства мы можем написать:
\ [\ begin {matrix} \ frac {{{R} _ {r}}} {s} = {{R} _ {r}} + \ frac {{{R} _ {r}}} {s} — {{R} _ {r}} & {} & \ left (4 \ right) \\\ end {matrix} \]
Объединение двух последних членов справа уравнения 4 дает
\ [\ begin {matrix} \ frac {{{R} _ {r}}} {s} = {{R} _ {r}} + {{R} _ {r}} \ left (\ frac {1-s} {s} \ right) & {} & \ left (5 \ right) \\\ end {matrix} \]
Замена резистивного элемента на Рисунке 6 двумя резистивными элементами на правая часть уравнения 5 дает эквивалентную схему ротора, показанную на рисунке 7.О причинах этой манипуляции мы поговорим чуть позже.
РИСУНОК 7 Цепь ротора, относящаяся к статору, с сопротивлением ротора, разделенным на две составляющие.
Наконец, комбинируя эквивалентную схему ротора на Рисунке 7 с эквивалентной схемой статора на Рисунке 2, мы получаем установившуюся эквивалентную схему для одной фазы асинхронного двигателя, соединенного звездой, как показано на Рисунке 8.
РИСУНОК 8 Эквивалентная схема пофазного асинхронного двигателя.
Снова запираясь на роторной части эквивалентной схемы на Рисунке 8, резистор R r представляет сопротивление обмотки ротора. Используемая им мощность — это мощность, теряемая при резистивном нагреве обмотки ротора. Дополнительный резистивный элемент на правом конце зависит от скольжения и сопротивления ротора. Это связано с необходимостью трансформировать схему ротора не только по соотношению витков, но и по частоте. Мощность, потребляемая в этом элементе, и есть развиваемая мощность машины.
Развиваемая мощность — это мощность, преобразованная из электрической формы в механическую, и включает мощность нагрузки плюс механические потери, такие как трение и сопротивление воздуха.
Вычитание механических потерь из развиваемой мощности даст мощность на валу, которая представляет собой фактическую мощность, передаваемую нагрузке. Развиваемый крутящий момент и крутящий момент на валу могут быть рассчитаны, соответственно, исходя из развиваемой мощности и мощности на валу.
Пример эквивалентной схемы асинхронного двигателя
Четырехполюсный асинхронный двигатель, 60 Гц, 460 В, 5 л.с. имеет следующие параметры эквивалентной схемы:
$ \ begin {matrix} \ begin {matrix} {{R} _ {s}} = 1.21 \ Omega & {{R} _ {r}} = 0,742 \ Omega \\\ end {matrix} & {{X} _ {s}} = 3.10 \ Omega \\ {{X} _ {r}} = 2.41 \ Omega & {{X} _ {m}} = 65.6 \ Omega \\\ end {matrix} $
Найдите пусковой ток и ток холостого хода для этой машины.
Решение
При запуске скольжение составляет 1,0, что означает, что нагрузочный резистор в эквивалентной схеме имеет короткое замыкание (1-с = 0). Сила тока будет равна напряжению, разделенному на полное сопротивление цепи. Входное сопротивление можно найти как:
\ [{{Z} _ {in}} = \ left ({{R} _ {s}} + j {{X} _ {s}} \ right) + \ гидроразрыв {j {{X} _ {m}} \ left ({{R} _ {r}} + j {{X} _ {r}} \ right)} {{{R} _ {r}} + j {{X} _ {r}} + j {{X} _ {m}}} \]
\ [{{Z} _ {in}} = \ left (1.{o}} \]
Однофазный асинхронный двигатель: работа схем и применение
Поскольку требования к питанию систем с одной нагрузкой обычно невелики, все наши дома, офисы снабжены только однофазным источником переменного тока. Для обеспечения надлежащих условий работы при использовании этого однофазного источника питания необходимо использовать совместимые двигатели. Помимо совместимости, двигатели должны быть экономичными, надежными и простыми в ремонте. Все эти характеристики легко найти в однофазном асинхронном двигателе.Подобно трехфазным двигателям, но с некоторыми модификациями, однофазные асинхронные двигатели являются отличным выбором для бытовой техники. Их простой дизайн и низкая стоимость привлекли множество приложений.
Однофазный асинхронный двигатель Определение
Однофазные асинхронные двигатели — это простые двигатели, которые работают от однофазного переменного тока и в которых крутящий момент создается за счет индукции электричества, вызванного переменными магнитными полями. Однофазные асинхронные двигатели бывают разных типов в зависимости от условий запуска и различных факторов.Их-
1). Двигатели с расщепленной фазой.
- Электродвигатели с сопротивлением пуска.
- Двигатели емкостные пусковые.
- Двигатель с постоянным разделенным конденсатором.
- Конденсаторный двигатель с двумя номиналами.
2). Асинхронные двигатели с расщепленными полюсами.
3). Асинхронный двигатель с резистивным пуском.
4). Отталкивание — пуск асинхронного двигателя.
Конструкция однофазного асинхронного двигателяОсновными частями однофазного асинхронного двигателя являются статор, ротор, обмотки.Статор — это неподвижная часть двигателя, на которую подается переменный ток. Статор содержит два типа обмоток. Одна — основная обмотка, другая — вспомогательная. Эти обмотки размещены перпендикулярно друг другу. К вспомогательной обмотке параллельно подключен конденсатор.
Поскольку питание переменного тока используется для работы однофазного асинхронного двигателя, необходимо учитывать определенные потери, такие как — потери на вихревые токи, потери на гистерезис. Для устранения потерь на вихревые токи статор имеет пластинчатую штамповку.Для уменьшения потерь на гистерезис эти штамповки обычно изготавливают из кремнистой стали.
Ротор — это вращающаяся часть двигателя. Здесь ротор похож на ротор с короткозамкнутым ротором. Ротор не только цилиндрический, но и имеет по всей поверхности прорези. Чтобы обеспечить плавную и стабильную работу двигателя, предотвращая магнитную блокировку статора и ротора, пазы скошены, а не параллельны.
Жилы ротора представляют собой алюминиевые или медные стержни, вставленные в пазы ротора.Торцевые кольца, изготовленные из алюминия или меди, замыкают проводники ротора. В этом однофазном асинхронном двигателе не используются контактные кольца и коммутаторы, поэтому их конструкция становится очень простой и легкой.
Эквивалентная схема однофазного асинхронного двигателя
На основе теории двойного вращающегося поля можно нарисовать эквивалентную схему однофазного асинхронного двигателя. Схема изображена в двух положениях — состояние покоя ротора состояние заблокированного ротора.
Двигатель с заблокированным ротором действует как трансформатор с короткозамкнутой вторичной обмоткой.
Эквивалентная схема однофазного асинхронного двигателяВ состоянии покоя ротора два вращающихся магнитных поля имеют противоположное направление с одинаково разделенными величинами и кажутся соединенными последовательно друг с другом.
Схема однофазного асинхронного двигателя в состоянии покоя ротораПринцип работы однофазного асинхронного двигателя
На главную обмотку однофазных асинхронных двигателей подается однофазный ток А.C. ток. Это создает флуктуирующий магнитный поток вокруг ротора. Это означает, что при изменении направления переменного тока изменяется направление генерируемого магнитного поля. Этого условия недостаточно, чтобы ротор вращался. Здесь применяется принцип теории двойного вращающегося поля.
Согласно теории двойного вращающегося поля, одиночное переменное поле возникает из-за комбинации двух полей равной величины, но вращающихся в противоположном направлении. Величина этих двух полей равна половине величины переменного поля.Это означает, что при приложении переменного тока создаются два поля половинной величины с равными величинами, но вращающимися в противоположных направлениях.
Итак, теперь в статоре течет ток, а на роторе вращается магнитное поле, таким образом, закон электромагнитной индукции Фарадея действует на ротор. Согласно этому закону вращающиеся магнитные поля производят электричество в роторе, которое создает силу «F», которая может вращать ротор.
Почему однофазный асинхронный двигатель не запускается автоматически?
Когда к ротору применяется закон электромагнитной индукции Фарадея, индуцируется электричество и создается сила на стержнях ротора.Но согласно теории двойного вращающегося поля, есть два магнитных поля с одинаковой величиной, но вращающихся в противоположном направлении. Таким образом, создаются два вектора силы с одинаковой величиной, но противоположными по направлению.
Таким образом, эти векторы силы, поскольку они имеют одинаковую величину, но противоположны по направлению, не заставляют ротор вращаться. Итак, однофазные асинхронные двигатели не запускаются самостоятельно. Мотор в таком состоянии просто гудит. Для предотвращения этой ситуации и вращения ротора необходимо приложить пусковое усилие для однофазного двигателя.Когда сила в одном направлении становится больше, чем сила в другом направлении, ротор начинает вращаться. В однофазных асинхронных двигателях для этой цели используются вспомогательные обмотки.
Способы пуска однофазного асинхронного двигателя
Однофазный асинхронный двигатель не имеет пускового момента, поэтому для обеспечения этого пускового момента необходима внешняя схема. Для этого в статоре этих двигателей имеется вспомогательная обмотка. Вспомогательная обмотка подключена параллельно конденсатору.Когда конденсатор включен, аналогично основной обмотке, на вспомогательной обмотке наблюдаются вращающиеся два магнитных поля одинаковой величины, но в противоположном направлении.
Из этих двух магнитных полей вспомогательной обмотки одно компенсирует одно из магнитных полей основной обмотки, а другое складывается с другим магнитным полем основной обмотки. Таким образом, в результате получается одно вращающееся магнитное поле большой величины. Это создает силу в одном направлении, следовательно, вращает ротор.Когда ротор начинает вращаться, он вращается, даже если конденсатор выключен.
Существуют различные способы определения однофазных асинхронных двигателей. Обычно эти двигатели выбираются в зависимости от способа их запуска. Эти методы можно отнести к
.- Двухфазный пуск.
- Запуск с расщепленными полюсами.
- Пуск отталкивающего двигателя
- Пуск противодействия.
При двухфазном пуске статор имеет два типа обмоток — основную обмотку и вспомогательную обмотку, соединенные параллельно.Двигатели с данным типом пуска —
- Двигатели с резистивным разделением фаз.
- Двигатели с конденсаторной фазой.
- Конденсаторы запускают и запускают двигатели.
- Двигатель с конденсаторным двигателем.
Однофазный индукционный конденсаторный пусковой двигатель
Его также называют конденсаторным электродвигателем с разделенной фазой. Здесь количество витков вспомогательной обмотки равно количеству витков основной обмотки. Конденсатор включен последовательно со вспомогательной обмоткой.Вспомогательная обмотка отключается с помощью центробежного переключателя, когда ротор достигает 75% синхронной скорости. Двигатель продолжает ускоряться, пока не достигнет нормальной скорости.
Номинальная мощность двигателей с конденсаторным пуском находится в диапазоне от 120 до 750 Вт. Эти двигатели обычно выбирают для таких применений, как холодильники, кондиционеры и т. Д. Из-за их высокого пускового момента.
Применение однофазных асинхронных двигателей
Эти двигатели находят применение в вентиляторах, холодильниках, кондиционерах, пылесосах, стиральных машинах, центробежных насосах, инструментах, мелкой сельскохозяйственной технике, воздуходувках и т. Д.Они в основном используются для маломощных устройств с постоянной скоростью, таких как сельскохозяйственные инструменты и оборудование, где трехфазное питание недоступно. Двигатели от 1/400 кВт до 1/25 кВт используются в игрушках, фенах и т. Д.…
Итак, мы часто используем однофазные асинхронные двигатели в повседневной жизни. Эти моторы легко ремонтировать. Тем не менее, у этих двигателей есть некоторые недостатки. С каким недостатком этих моторов вы столкнулись? Вы можете назвать некоторые из них?
Источник изображения: Цепи однофазных асинхронных двигателей
Эквивалентная схема асинхронного двигателя
Эквивалентная цепь статора:
Модель статора асинхронного двигателя состоит из сопротивления фазной обмотки статора R 1 , реактивного сопротивления утечки фазной обмотки статора X 1 .Эти два компонента отображаются справа от модели машины. Ток холостого хода I 0 моделируется чисто индуктивным реактором X 0 с намагничивающей составляющей I µ и неиндуктивным резистором R 0 , несущим ток потерь в сердечнике I ω .
Таким образом,
Ток намагничивания в случае асинхронного двигателя выше, чем у трансформатора, потому что воздушный зазор асинхронного двигателя вызывает более высокое сопротивление.
Реактивное сопротивление намагничивания X 0 в асинхронном двигателе будет иметь гораздо меньшее значение.В трансформаторе I 0 составляет примерно от 2 до 5% номинального тока, а в асинхронном двигателе — примерно от 25 до 40% номинального тока в зависимости от размера двигателя.
Эквивалентная цепь ротора:
Это асинхронный двигатель, когда на обмотки статора подается напряжение 3φ, в обмотках ротора машины индуцируется напряжение. Как правило, чем выше относительное движение ротора и магнитных полей статора, тем выше результирующее напряжение на роторе.Максимальное относительное движение происходит, когда ротор неподвижен, это состояние называется состоянием покоя. Это также известно как состояние заблокированного ротора или заблокированного ротора.
Если индуцированное напряжение ротора равно E 20 , то индуцированное напряжение при любом скольжении определяется выражением,
Сопротивление ротора R 2 постоянно. Это не зависит от скольжения.
Реактивное сопротивление ротора асинхронного двигателя зависит от индуктивности ротора, частоты напряжения и тока ротора.
Если L 2 = индуктивность ротора, реактивное сопротивление ротора определяется как
X 2 = 2πf 2 L 2 Но f 2 = SF 1 ∴ X 2 = 2π sf 1 L 2 = s (2π f 1 L 2 ) Или X 2 = sX 20
В приведенном выше уравнении X 20 — реактивное сопротивление ротора в состоянии покоя.
Импеданс ротора равен
.Z 2s = R 2 + jX 2s Или Z 2s = R2 + jsX 20
Ток ротора по фазе равен
.В схеме, изображенной выше, I 2 — это ток частоты скольжения, создаваемый индуцированным напряжением sE20 частоты скольжения, действующим в цепи ротора, имеющим полное сопротивление на фазу (R 2 + jsX 20 ).
Разделив числитель и знаменатель приведенного выше уравнения на промах s, мы получим
Следует отметить, что величина и фазовый угол I2s остаются неизменными при этой операции.
Это уравнение описывает вторичную цепь фиктивного трансформатора с постоянным соотношением напряжений и одинаковой частотой на обеих сторонах. Этот фиктивный неподвижный ротор проводит тот же ток, что и реальный вращающийся ротор, и, таким образом, производит такое же m.м.ф волна. Эта концепция фиктивного неподвижного ротора позволяет передавать вторичное сопротивление первичной стороне.
Асинхронные двигатели — Руководство по электрическому монтажу
Асинхронный (т.е. асинхронный) двигатель прочен и надежен и очень широко используется. 95% двигателей, установленных по всему миру, являются асинхронными. Следовательно, защита этих двигателей имеет большое значение во многих приложениях.
Введение
Асинхронные двигатели используются в самых разных областях.Вот несколько примеров приводных машин:
- кондиционеры воздуха,
- чиллеры,
- лифтов,
- вентиляторы и нагнетатели,
- пожарный насос,
- центробежные насосы,
- компрессоры,
- дробилки,
- конвейеры,
- подъемников и кранов,
- …
Последствия отказа двигателя из-за неправильной защиты или невозможности работы схемы управления могут включать следующее:
- Для лиц:
- Удушье из-за блокировки вентиляции мотора
- Поражение электрическим током из-за нарушения изоляции двигателя
- Авария из-за того, что двигатель не остановился из-за отказа цепи управления
- Для ведомой машины и процесса:,
- Муфты валов, оси, приводные ремни,… повреждены из-за остановки ротора
- Пострадавшая продукция
- Отложенное производство
- Для самого мотора:
- Перегорели обмотки двигателя из-за остановки ротора
- Стоимость ремонта
- Стоимость замены
Таким образом, безопасность людей и товаров, а также надежность и доступность во многом зависят от выбора средств защиты.
С экономической точки зрения необходимо учитывать общую стоимость отказа. Эта стоимость увеличивается с увеличением размера двигателя и трудностями доступа и замены. Потери производства — еще один, очевидно, важный фактор.
Специфические характеристики двигателя влияют на цепи питания, необходимые для удовлетворительной работы.
Цепь питания двигателя имеет определенные ограничения, которые обычно не встречаются в других (общих) схемах распределения.Это связано с особыми характеристиками двигателей, напрямую подключенных к линии, таких как:
- Высокий пусковой ток (см. Рис. N74), который в основном является реактивным и поэтому может быть причиной значительного падения напряжения
- Количество и частота пусковых операций в целом высокие
- Высокий пусковой ток означает, что устройства защиты двигателя от перегрузки должны иметь рабочие характеристики, предотвращающие срабатывание во время периода пуска.
Рис. N74 — Характеристики прямого пускового тока асинхронного двигателя
Блок-схема силовой и управляющей цепей драйвера асинхронного двигателя.
Фрукты и овощи созревают в определенное время года и должны быть спелыми для употребления. Однако в краткосрочный период созревания некоторые свежие овощи и фрукты, количество которых превышает потребляемое количество, портятся до того, как их можно будет употребить в пищу. Наиболее распространенным методом хранения является сбор созревших фруктов и овощей и сушка излишков для последующего использования.В последние годы, когда технология быстро развивалась, вместо сушки на солнце создаются решения, в которых процессы сушки управляются автоматически с использованием кинематики сушки продуктов. В новейших технологиях процесс сушки регулируется путем измерения веса влажных и высушенных продуктов во время нагрева. Кроме того, различные типы духовок, такие как микроволновые печи, пытаются повысить эффективность процесса сушки. Это довольно сложные решения. В этом исследовании разработана интеллектуальная система, которая управляет процессом сушки в режиме реального времени, используя влажность окружающей среды вместо веса вместе с кинематикой сушки продукта.Таким образом, сложность системы упрощается. Кроме того, общая продолжительность процесса сушки точно оценивается на основе содержания влаги в окружающей среде и модели сушки продукта. В ходе исследования, во-первых, были собраны данные о стадии сушки с экспериментами, проведенными для каждого продукта. Эти данные были обработаны в среде Matlab, и для каждого продукта была разработана модель сушки с методом аппроксимации кривой. Модели сушки, разработанные в ходе исследования, загружались в процессор интеллектуальной печи, и весь процесс сушки контролировался в режиме реального времени.С помощью разработанного системного решения, когда процесс начинается, время сушки оценивается в соответствии с обработанным количеством и типом продукта, а время сушки процесса сушки оценивается с использованием содержания влаги в окружающей среде и модели сушки.