


Что такое H-мост и зачем он нужен. Пример расчёта H-моста на биполярных транзисторах
Сегодня мы рассмотрим схему, позволяющую изменять полярность прикладываемого к нагрузке постоянного напряжения.
Необходимость изменять полярность напряжения часто возникает при управлении двигателями или в схемах мостовых преобразователей напряжения. Например, для двигателей постоянного тока это необходимо для изменения направления вращения, а шаговые двигатели или импульсные мостовые DC-DC преобразователи без решения этой задачи вообще не будут работать.
Итак, ниже вы можете видеть схему, которую за внешнюю схожесть с буквой H принято называть H-мостом.
К1, К2, К3, К4 — управляемые ключи
A, B, C, D — сигналы управления ключами
Идея этой схемы очень проста:
Если ключи K1 и К4 замкнуты, а ключи К2 и К3 разомкнуты, то к точке h2 оказывается приложено напряжение питания, а точка h3 замыкается на общий провод. Ток через нагрузку в этом случае течёт от точки h2 к точке h3.
Если сделать наоборот, — ключи К1 и К4 разомкнуть, а ключи К2 и К3 замкнуть, то полярность напряжения на нагрузке изменится на противоположную, — точка h2 окажется замкнута на общий провод, а точка h3 — на шину питания. Ток через нагрузку теперь будет течь от точки h3 к точке h2.
Кроме смены полярности, h-мост, в случае управления электродвигателем, добавляет нам и ещё один бонус — возможность закоротить концы обмоток, что ведёт к резкому торможению нашего движка. Такой эффект можно получить замкнув одновременно либо ключи К1 и К3, либо ключи К2 и К4. Назовём такой случай «режимом торможения». Справедливости ради стоит отметить, что этот бонус H-моста используется значительно реже, чем просто смена полярности (позже будет понятно почему).
В качестве ключей может выступать всё, что угодно: реле, полевые транзисторы, биполярные транзисторы. Промышленность делает H-мосты встроенными в микросхемы (например, микросхема LB1838, драйвер шагового двигателя, содержит два встроенных H-моста) и выпускает специальные драйверы для управления H-мостами (например драйвер IR2110 для управления полевиками). В этом случае, разработчики микросхем конечно стараются выжать максимум бонусов и устранить максимум нежелательных эффектов. Понятно, что такие промышленные решения справляются с задачей лучше всего, но радиохламеры народ бедный, а хорошие микросхемы стоят денег, поэтому мы, ясен пень, будем рассматривать чисто самопальные варианты мостов и схем управления ими.
В самопальщине (то бишь в радиолюбительской практике) чаще всего используют H-мосты либо на мощных MOSFET-ах (для больших токов), либо на биполярных транзисторах (для небольших токов).
Довольно часто сигналы управления ключами попарно объединяют. Объединяют их таким образом, чтобы от одного внешнего сигнала управления формировалось сразу два сигнала управления в нашей схеме (то есть сразу на два ключа). Это позволяет сократить количество внешних сигналов управления с четырёх до двух штук (и сэкономить 2 ноги контроллера, если у нас контроллерное управление).
Объединяют сигналы чаще всего двумя способами: либо A объединяют с B, а C объединяют с D, либо A объединяют с D, а B объединяют с C. Чтобы обозначить и зафиксировать различия, — назовём способ, когда образуют пары AB и CD «общим управлением противофазными ключами» (эти ключи для изменении полярности прикладываемого к нагрузке напряжения должны работать в противофазе, т.е. если один открывается — другой должен закрываться), а способ, когда образуются пары AD и BC назовём «общим управлением синфазными ключами» (эти ключи для изменении полярности работают синфазно, т.е. либо оба должны открываться, либо оба закрываться).
Чтобы было понятнее о чём идёт речь, — смотрим на рисунок справа. Договоримся далее высокий уровень напряжения считать единицей, а низкий — нулём. В левой части рисунка транзисторы управляются независимо друг от друга. Чтобы открыть верхний транзистор — нужно подать сигнал управления А=0, а чтобы его закрыть — нужно подать А=1. Для открытия и закрытия нижнего транзистора нужно подавать B=1 или В=0. Если с помощью дополнительного транзистора объединить сигналы A и В (смотрим правую часть рисунка), то управлять верхним и нижним транзистором можно одним общим сигналом АВ. Когда АВ=1 оба транзистора открываются, а когда АВ=0 — оба закрываются.
На рисунке слева показан H-мост с общим управлением противофазными ключами, а на рисунке справа — с общим управлением синфазными ключами. У1 и У2 — это узлы, позволяющие из одного внешнего общего сигнала сформировать отдельный сигнал на каждый из работающих в паре ключей.
Теперь давайте подумаем что нам даёт каждый из этих двух способов управления.
При общем управлении противофазными ключами мы легко можем сделать так, чтобы оба верхних или оба нижних ключа оказались открыты (если схема такая, как у нас слева, то это произойдёт при AB=CD), то есть нам доступен режим торможения. Однако минус в том, что при таком способе управления мы практически наверняка получим сквозные токи через транзисторы, вопрос будет только в их величине. В проиышленных микрухах для борьбы с этой проблемой вводят специальную цепь задержки для одного из транзисторов.
При общем управлении синфазными ключами мы легко можем побороть сквозные токи (просто нужно сначала подавать сигнал на выключение той пары транзисторов, которая используется в настоящий момент, а уже потом сигнал на включение той пары, которую мы планируем использовать). Однако при таком управлении про режим торможения можно забыть (даже более того, если мы случайно одновременно подадим на оба внешних управляющих сигнала единицу — мы устроим в схеме КЗ).
Поскольку получить сквозные токи гораздо более кислый вариант (бороться с ними непросто), то обычно предпочитают забыть про режим торможения.
Кроме всего вышеперечисленного необходимо понимать, что при частых постоянных переключениях (в преобразователях или при управлении шаговиками), для нас будет принципиально важно не только избежать возникновения сквозных токов, но и добиться максимальной скорости переключения ключей, поскольку от этого зависит их нагрев. Если же мы используем h-мост просто для реверса двигателя постоянного тока, то тут скорость переключения не имеет такого критического значения, поскольку переключения не имеют систематического характера и ключи даже в случае нагрева скорее всего успеют остыть до следующего переключения.
Вот в общем-то и вся теория, если вспомню ещё что-нибудь важное — обязательно напишу.
Как вы понимаете, практических схем H-мостов, как и вариантов управления ими, можно придумать достаточно много, поскольку, как мы уже разобрались, важно учитывать и максимальный ток, и скорость переключения ключей, и варианты объединения управления ключами (а также вообще возможность такого объединения), поэтому для каждой практической схемы нужна отдельная статья (с указанием того, где эту конкретную схему целесообразно использовать). Здесь же я приведу для примера лишь простую схемку на биполярных транзисторах, годящуюся, скажем, для управления не очень мощными двигателями постоянного тока (зато покажу, как её рассчитывать).
Итак, пример:
Сам H-мост выполнен на транзисторах T1, T2, T3, T4, а с помощью дополнительных транзисторов T5, T6 выполнено объединение управления синфазными ключами (сигнал A управляет транзисторами T1 и T4, сигнал B — транзисторами T2 и T3).
Работает эта схема следующим образом:
Когда уровень сигнала A становится высоким — начинает течь ток через резистор R2 и p-n переходы БЭ транзисторов T5 и T4, эти транзисторы открываются, в результате чего появляется ток через переход БЭ транзистора T1, резистор R1 и открытый транзистор T5, в результате чего открывается транзистор T1.
Когда уровень сигнала A становится низким — запираются p-n переходы БЭ транзисторов T5 и T4, эти транзисторы закрываются, прекращает течь ток через переход БЭ транзистора T1 и он тоже закрывается.
Как такую схему рассчитать? Очень просто. Пусть у нас напряжение питания 12В, максимальный ток двигателя 1А и сигнал управления также 12-ти вольтовый (состоянию «1» соответствует уровень напряжения около 12В, состоянию «0» — уровень около нуля вольт).
Сначала выбираем транзисторы T1, T2, T3, T4. Подойдут любые транзисторы, способные выдержать напряжение 12В и ток 1А, например, КТ815 (npn) и его комплиментарная пара — КТ814 (pnp). Эти транзисторы рассчитаны на ток до 1,5 Ампер, напряжение до 25 Вольт и имеют коэффициент усиления 40.
Рассчитываем минимальный ток управления транзисторов T1, T4: 1А/40=25 мА.
Рассчитываем резистор R1, полагая, что на p-n переходах БЭ транзисторов T1, T4 и на открытом транзисторе T5 падает по 0,5В: (12-3*0,5)/25=420 Ом. Это максимальное сопротивление, при котором мы получим нужный ток управления, поэтому мы выберем ближайшее меньшее значение из стандартного ряда: 390 Ом. При этом наш ток управления будет (12-3*0,5)/390=27 мА, а рассеиваемая на резисторе мощность: U
Транзистор T5 должен выдерживать всё те же 12В и ток 27 мА. Подойдёт, например, КТ315А (25 Вольт, 100 мА, минимальный коэффициент усиления 30).
Рассчитываем его ток управления: 27 мА / 30 = 0,9 мА.
Рассчитываем резистор R2, полагая, что на переходах БЭ транзисторов T5 и T4 падает по 0,5 В: (12-2*0,5)/0,9 = 12 кОм. Опять выбираем ближайшее меньшее значение из стандартного ряда: 10 кОм. При этом ток управления T5 будет 1,1 мА и на нём будет рассеиваться 12,1 мВт тепла (то есть подойдёт обычный резистор на 0,125 Вт).
Вот и весь расчёт.
Далее хотелось бы поговорить вот о чём. В приведённых в статье теоретических схемах H-мостов у нас нарисованы только ключи, однако в рассматриваемом примере, кроме ключей присутствуют ещё одни элементы — диоды. Каждый наш ключ шунтирован диодом. Зачем это сделано и можно ли сделать как-то иначе?
В нашем примере мы управляем элетродвигателем. Нагрузкой, на которой мы переключаем полярность с помощью H-моста, является обмотка этого двигателя, то есть нагрузка у нас индуктивная. А у индуктивности есть одна интересная особенность — ток через неё не может измениться скачком.
Индуктивность работате как маховик — когда мы его раскручиваем — он запасает энергию (и мешает раскручиванию), а когда мы его отпускаем — он продолжает крутиться (расходуя
запасённую энергию). Так и катушка, — когда к ней прикладывают внешнее напряжение — через неё начинает течь ток, но он не резко вырастает, как через резистор, а постепенно, поскольку часть передаваемой источником питания энергии не расходуется на разгон электронов, а запасается катушкой в магнитном поле. Когда мы это внешнее напряжение убираем, — ток через катушку тоже не спадает мгновенно, а продолжает течь, уменьшаясь постепенно, только теперь уже на поддержание этого тока расходуется запасённая ранее в магнитном поле энергия.
Так вот. Посмотрим ещё раз наш самый первый рисунок (вот он, справа). Допустим у нас были замкнуты ключи К1 и К4. Когда мы эти ключи размыкаем, у нас через обмотку продолжает течь ток, то есть заряды продолжают перемещаться от точки h2 к точке h3 (за счёт энергии, накопленной обмоткой в магнитном поле). В результате этого перемещения зарядов, потенциал точки h2 падает, а потенциал точки h3 вырастает. Возникновение разности потенциалов между точками h2 и h3 при отключении катушки от внешнего источника питания известно также как ЭДС самоиндукции. За то время, пока мы открываем ключи K3 и К2, потенциал точки h2 может упасть значительно ниже нуля, также как и потенциал точки h3 может вырасти значительно выше потенциала шины питания. То есть наши ключи могут оказаться под угрозой пробоя высоким напряжением.
Как с этим бороться? Есть два пути.
Первый путь. Можно зашунтировать ключи диодами, как в нашем примере. Тогда при падении потенциала точки h2 ниже уровня общего провода откроется диод D3, через который с общего провода в точку h2 потечёт ток, и дальнейшее падение потенциала этой точки прекратиться. Аналогично, при росте потенциала точки h3 выше потенциала шины питания откроется диод D2, через который потечёт ток из точки h3 на шину питания, что опять же предотвратит дальнейший рост потенциала точки h3.
Второй путь основан на том факте, что при перекачивании зарядов из одной точки схемы в другую, изменение потенциалов между этими двумя точками будет зависеть от ёмкости схемы между этими точками. Чем больше ёмкость — тем больший заряд нужно переместить из одной точки в другую для получения одной и той же разности потенциалов (подробнее читайте в статье «Как работают конденсаторы»). Исходя из этого можно ограничить рост разности потенциалов между концами обмотки двигателя (а, соответственно, и рост разности потенциалов между точками h2, h3 и шинами питания и земли), зашунтировав эту обмотку конденсатором. Это, собственно, и есть второй путь.
На этом на сегодня всё, удачи!
Мостовая схема управления двигателем постоянного тока
Мостовая схема управления двигателем постоянного тока
При конструировании робота желательно наличие простой схемы управления его включением и выключением. Кроме того, необходима схема реверса направления вращения двигателя. Таким требованиям удовлетворяет мостовая схема управления.
Необходимо понимать, что термин «двигатель постоянного тока» относится также к двигателям, снабженным редукторами или имеющим редукторную головку.
Мостовая схема состоит из четырех транзисторов (некоторые используют МОП полевые транзисторы. Я использую биполярные Дарлингтоновские NPN транзисторы). В некоторых схемах используются транзисторы PNP и NPN проводимости. В любом случае транзисторы используются в ключевом режиме (см. рис. 4.16А). Когда ключи SW1 и SW4 закрыты, двигатель вращается в одном направлении. Когда закрыты ключи SW2 и SW3, двигатель вращается в противоположном направлении.

Рис. 4.16. Мостовая схема на переключателях
При правильной коммутации ключей мы можем изменить направление тока, протекающего через двигатель, на противоположное, что вызовет изменение направления вращения вала двигателя. Транзисторная схема моста, управляющего двигателем, показана на рис. 4.17. Подобная схема использована в гл. 5 в схеме сенсора робота-тестера.

Рис. 4.17. Мостовая схема на транзисторах
Данный текст является ознакомительным фрагментом.Читать книгу целиком
Поделитесь на страничкеСледующая глава >
Мостовая схема управления вращением двигателя постоянного тока
Полная мостовая схема (Н-образный мост) содержит четыре выключателя, соединенных последовательно-параллельно. Широко распространен электронный вариант моста, где обычно используются транзисторы, работающие в режиме переключения. Такая схема часто служит для управления двигателем постоянного тока и позволяет изменять скорость и направление вращения.
Схема, приведенная на рис. 1 а, иллюстрирует управление двигателем, который можно привести в одно из четырех различных состояний: вращения в одном или в другом направлении, отключения и принудительной остановки (торможения). Последний вариант осуществляется путем одновременного замыкания двух нижних выключателей. В результате происходит закорачивание обмотки двигателя. Схема часто используется для управления двигателями в радиоуправляемых моделях. Последовательность сигналов должна быть достаточно точной: нужно избежать одновременного замыкания двух переключателей в одной ветви, что привело бы к закорачиванию источника питания. Чтобы выполнить это условие, для формирования управляющих сигналов обычно применяется специальное устройство. Путем периодического прерывания тока в ветвях моста можно изменять среднее значение тока, протекающего через двигатель, а следовательно, и скорость его вращения.
Другим интересным примером использования полной мостовой схемы является генерация импульсного сигнала, у которого полный перепад уровней равен удвоенной величине напряжения источника питания (рис. 1 б).
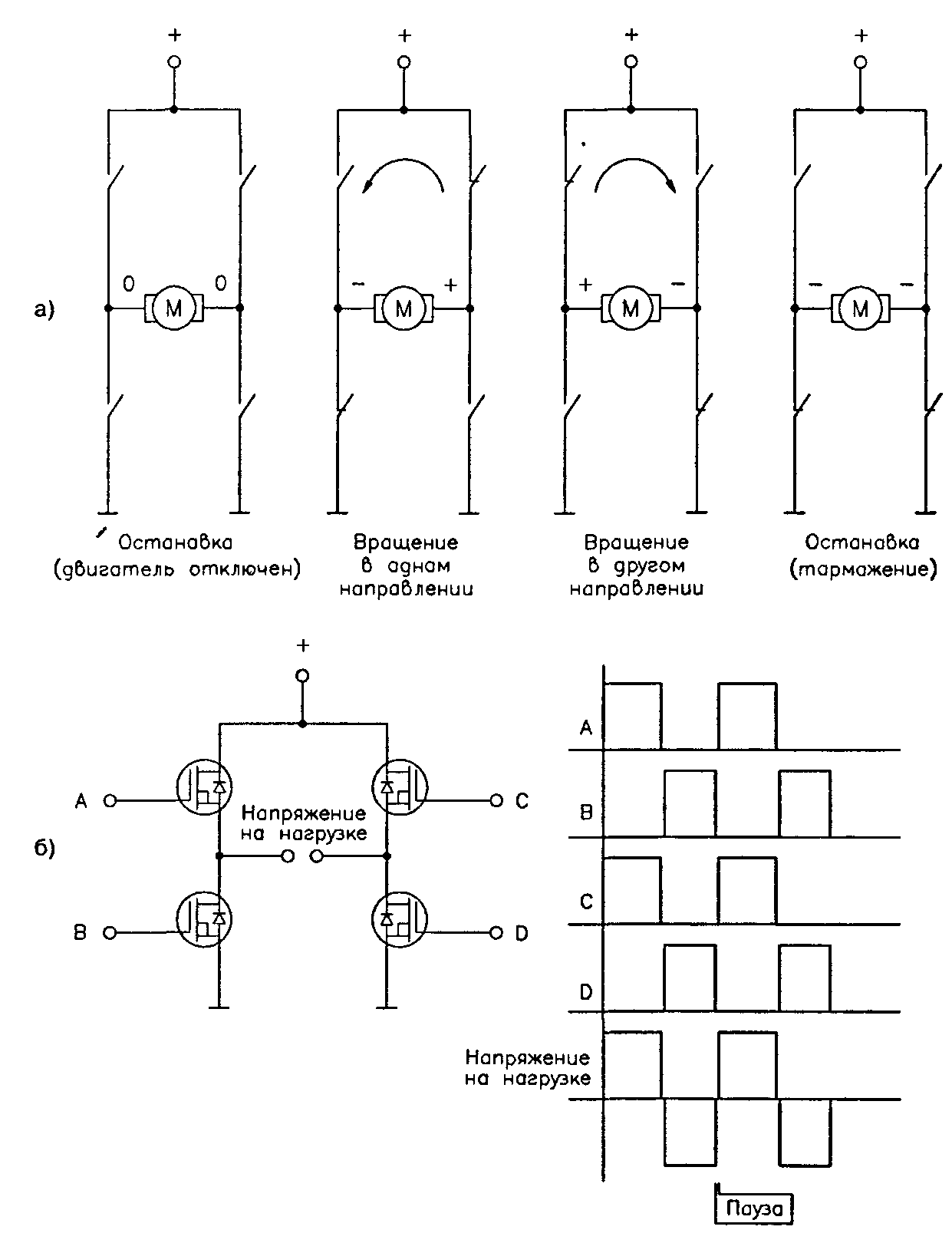
Рис. 1. Мостовая схема управления вращением двигателя
Для решения этой задачи периодически чередуют токи в двух противоположных ветвях, выполняя вышеуказанное условие. В зависимости от типа нагрузки, включенной на выходе моста (индуктивной или емкостной), время паузы в подаче сигналов подбирают так, чтобы ток успевал снизиться до прихода сигнала противоположной полярности. Описанная схема может использоваться для подачи сигнала повышенного напряжения на громкоговоритель или в выходных каскадах инвертора.
В качестве переключающих элементов все чаще применяются МОП транзисторы благодаря малому току, потребляемому по цепи управления. Однако переключение мощных транзисторов является непростой задачей, поскольку для этого необходимо располагать управляющим напряжением порядка 10 В относительно истока, который в данном случае является точкой с плавающим потенциалом. Есть несколько возможных решений данной проблемы, в частности подача управляющего сигнала через трансформатор, использование источника питания с незаземленным выходом или применение специализированных схем.
Джон Ловин. Создаем робота-андроида своими руками
Некоторые двигатели постоянного тока конструктивно объединены с редуктором и называются двигателями с редукторной головкой (см. рис. 4.15).
Рис. 4.15. Двигатель постоянного тока с редукторной головкой
Мостовая схема управления двигателем постоянного тока
При конструировании робота желательно наличие простой схемы управления его включением и выключением. Кроме того, необходима схема реверса направления вращения двигателя. Таким требованиям удовлетворяет мостовая схема управления.Необходимо понимать, что термин «двигатель постоянного тока» относится также к двигателям, снабженным редукторами или имеющим редукторную головку.
Мостовая схема состоит из четырех транзисторов (некоторые используют МОП полевые транзисторы. Я использую биполярные Дарлингтоновские NPN транзисторы). В некоторых схемах используются транзисторы PNP и NPN проводимости. В любом случае транзисторы используются в ключевом режиме (см. рис. 4.16А). Когда ключи SW1 и SW4 закрыты, двигатель вращается в одном направлении. Когда закрыты ключи SW2 и SW3, двигатель вращается в противоположном направлении.
Рис. 4.16. Мостовая схема на переключателях
При правильной коммутации ключей мы можем изменить направление тока, протекающего через двигатель, на противоположное, что вызовет изменение направления вращения вала двигателя. Транзисторная схема моста, управляющего двигателем, показана на рис. 4.17. Подобная схема использована в гл. 5 в схеме сенсора робота-тестера.
Рис. 4.17. Мостовая схема на транзисторах
Широтно-импульсная модуляция (ШИМ)
Мостовая схема обеспечивает включение-выключение двигателя постоянного тока и управляет направлением его вращения. К этим функциям может быть добавлена функция управления частотой вращения двигателя с использованием широтно-импульсной модуляции (ШИМ). Форма ШИМ сигнала приведена на рис. 4.18. Высокий уровень сигнала ШИМ соответствует включению двигателя, низкий уровень его выключает. Поскольку частота импульсов ШИМ очень велика, то напряжение на двигателе может быть определено как среднее значение длины импульса к периоду следования (скважность импульса). Чем больше длина импульса, тем больше среднее напряжение. Среднее напряжение лежит в пределах от нуля до напряжения питания, и, таким образом, ШИМ эффективно управляет скоростью вращения двигателя.Рис. 4.18. Широтно-импульсная модуляция (ШИМ) для управления мостовой схемой
Двигатель является индуктивной нагрузкой. В моменты включения/выключения возникающее переходное напряжение, генерируемое обмотками двигателя, может повредить полупроводниковые части моста. Для гашения этого напряжения используются защитные диоды, включенные параллельно транзисторам, как показано на рис. 4.19.
Рис. 4.19. Транзисторная мостовая схема с защитными диодами
Защитный диод гасит обратное переходное напряжение на землю, что эффективно защищает переход транзистора, к которому подключен диод. Защитные диоды должны быть рассчитаны на нормальный ток, потребляемый двигателем.
Сенсорика роботов (система чувствительных датчиков) обычно копирует функции органов чувств человека: зрение, слух, обоняние, осязание и вкус. Чувство равновесия и положения тела в пространстве, как функция внутреннего уха, иногда считаются шестым чувством. Функционирование биологических органов чувств базируется на принципе нейронной активности, в то время как чувствительные органы роботов имеют электрическую природу. Возможны возражения, что на самом деле обе эти группы имеют электрическую природу, основанные на указании, что нейронные и электрические цепи имеют общее электрохимическое происхождение. Тем не менее, нейронная сенсорика функционирует иначе, чем просто электрическая. По этой причине для устранения разночтений мы определим сенсорику робота, как имеющую электрическую природу.
Для полной имитации биологических органов чувств необходимо использование нейронных чувствительных устройств (сенсоров). Примером такого нейронного сенсора является человеческое ухо, работу которого мы рассмотрим. Характеристика человеческого уха нелинейна. Его реакция на звуковой раздражитель носит логарифмический характер. Это означает, что десятикратное повышение уровня звукового сигнала вызывает двукратное повышение субъективного уровня громкости. Для сравнения, обычный приемник звуковых сигналов, например микрофон, имеет линейную выходную характеристику. Отсюда десятикратное повышение уровня выходного сигнала, подаваемого на компьютер, микроконтроллер или иную схему, соответствует десятикратному увеличению звукового сигнала.
Сенсорные датчики могут обнаружить какие-то внешние сигналы и определить их величину, что выражается в появлении на выходе пропорционального электрического сигнала. Информация, содержащаяся в сигнале, должна быть считана и обработана «интеллектом» робота (например, ЦПУ) или нейронной сетью. Мы можем характеризовать искусственные сенсоры по их отношению к природным органам чувств, но обычно классы сенсорных устройств выделяются по типу воздействия, на которое данный сенсор реагирует: свет, звук, тепло и т. д. Типы сенсоров, встроенных в робота, определяются целями и местом его применения.
Обработка сигналов
При выборе типа сенсорного устройства, используемого в роботе, необходимо решить вопрос чтения и обработки сигнала, поступающего от него. Vjui Многие сенсоры представляют собой датчики резистивного типа, что означает, что их сопротивление меняется в зависимости от количества поступающей энергии. Если такой датчик является частью делителя напряжения, то амплитуда выходного сигнала окажется пропорциональной количеству поступающей энергии.
Если для робота необходимо действительное значение интенсивности поступающей энергии, необходимо использовать аналого-цифровой преобразователь (АЦП). АЦП измеряет входной электрический сигнал и выдает соответствующий ему двоичный код.
Для правильной работы и преобразования данных АЦП необходим микроконтроллер или цифровая схема. Во многих случаях использование АЦП не является необходимым. В некоторых случаях достаточно использовать компаратор.
Как следует из самого названия, компаратор сравнивает два электрических напряжения. Одно из напряжений называется опорным и устанавливается по нашему желанию. Другое напряжение выдается сенсорным датчиком (через делитель напряжения). Выход компаратора имеет два уровня – высокий и низкий. Высокий уровень соответствует +5 В, низкий уровень – 0 В.
Выходной сигнал компаратора зависит от соотношения уровней напряжений на его двух входах. Возможны три состояния: напряжение датчика меньше опорного напряжения, равно ему или превосходит его.
Пример построения компаратора
Лучшим способом познакомиться с работой компаратора является использование его в схеме. Посмотрев на рис. 5.1, вы сразу обнаружите, что компаратор выглядит почти так же, как операционный усилитель. Это действительно так; компараторы представляют собой специализированные операционные усилители (ОУ). Компаратор, использованный в первом примере, представляет собой счетверенный компаратор типа LM339. Эта интегральная схема состоит из четырех компараторов и заключена в корпус с 14 выводами. Аналогично ОУ компараторы имеют инвертированный и неинвертированный входы. В данном случае опорное напряжение подается на инвертированный вход (-).Рис 5.1. Схема компаратора и счетверенный компаратор на ИС LM 339
Делитель напряжения
Делитель напряжения представляет собой простой, но очень важный элемент схемы. Его использование позволяет состыковать большинство резистивных сенсорных датчиков с входом компаратора. Опорное напряжение получается также с помощью делителя напряжения на двух резисторах 10 кОм (см. рис. 5.2А). Voп. в данном случае будет равно 2,5 В, т. е. половине питающего напряжения 5 В (см. табл. 5.1). Понятно, что величина Voп. может быть любой в пределах от нуля до напряжения питания и зависит от отношения сопротивлений делителя напряжения.Vоп.=Vпит.хR2/(R1+R2)
где Vпит.=5 В.
Рис. 5.2. Делители напряжения А, В и С
Таблица 5.1. Двухрезисторный делитель напряжения
Для создания переменного делителя напряжения можно использовать переменный резистор, как показано на рис. 5.2В и 5.2С. Я предпочитаю схему 5.2А как самую простую.Схема для проверки работы устройства приведена на рис. 5.3 Вместо сенсорного датчика мы будем использовать два постоянных резистора в 1 кОм и переменный резистор 5 кОм. Переменным резистором можно регулировать величину напряжения, поступающего на неинвертированный вход. Выход компаратора обычно представляет собой NPN транзистор с открытым коллектором, выходной ток которого более чем достаточен для подключения светодиода, который мы будем использовать в качестве индикатора. Говоря иначе, выход компаратора может быть использован как электронный ключ, замыкаемый на землю. Это окажется полезным позднее при коммутации таймера типа 555.
Рис. 5.3. Схема проверки работы компаратора
После сборки схемы посмотрим, что будет происходить. Когда входное напряжение меньше опорного Vоп., на выходе компаратора будет присутствовать низкий уровень 0 В, через светодиод будет протекать ток, что вызовет его свечение. Если мы с помощью переменного резистора повысим напряжение Vвх. до уровня, превышающего Voп. уровень выхода перебросится в положение «высокий», и светодиод погаснет. Можно проверить работу компаратора вольтметром, измеряя значения напряжений на инвертированном и неинвертированном входах.
Многие, и я в том числе, находят работу подобной схемы несколько неестественной. Более привычным является зажигание светодиода при превышении Vвх. над Voп. Это можно легко сделать, поменяв местами подключения входов компаратора, т. е. присоединив Vвх. к инвертированному входу компаратора, а Voп. к неинвертированному соответственно. Функция выхода изменится при этом на противоположную.
Если по схеме не требуется большого количества компараторов, то в качестве компаратора можно использовать КМОП операционный усилитель, включенный соответствующим образом. Я предпочитаю использовать подобные ОУ, поскольку они обеспечивают достаточный выходной ток для питания светодиодов и других частей схемы (см. рис. 5.4).
Рис. 5.4. Схема проверки работы компаратора на ОУ
Датчики освещенности (фотосенсоры)
Существует большое количество различных типов датчиков освещенности: фоторезисторы, фотоэлектрические устройства, фотодиоды и фототранзисторы. Световые датчики могут использоваться для определения положения и направления движения. Некоторые роботы используют источники ИК излучения и ИК приемники для обхода препятствий и предотвращения ударов о стены. Источник и приемник ИК излучения монтируются в передней части робота и имеют одинаковое направление. При приближении робота к препятствию или стене, ИК излучение отражается от их поверхности и детектируется ИК приемником. ЦПУ робота интерпретирует такое увеличение сигнала как препятствие и обводит робота вокруг него.
Перед датчиком освещенности могут быть установлены фильтры, выделяющие световые волны определенной длины и поглощающие прочие. Примером таких фильтров могут служить фильтры, установленные на роботах-пожарных и детектирующие наличие открытого пламени. Подбором фильтра можно выделить свет, излучаемый пламенем, и ослабить световые лучи, приходящие от других источников.
Другим примером является использование эмульсионных цветовых фильтров для различения цвета. Можно представить себе робота, собирающего или выбирающего только спелые фрукты на основании цвета их кожуры.
Фоторезисторы
Фоторезисторы на основе сульфида кадмия (см. рис. 5.5) являются устройствами, реагирующими на видимый свет. Спектр поглощения такого резистора близок к спектру человеческого глаза (см. рис. 5.6). CdS – фоторезистор представляет собой полупроводник, но без обычного PN перехода. Наибольшее сопротивление такой фоторезистор имеет в полной темноте. По мере увеличения освещенности его сопротивление уменьшается. Измеряя сопротивление резистора, можно оценить среднюю освещенность в видимом спектре.Рис. 5.5. Фотоэлементы на основе сульфида кадмия (CdS)
Рис. 5.6. Диаграмма, показывающая сравнительную спектральную чувствительность глаза и светочувствительных датчиков
Световой выключатель на основе фоторезистора
На рис. 5.7 приведена основная схема устройства. Поскольку CdS-преобразователь представляет собой резистор, он может быть включен напрямую в делитель напряжения. По мере нарастания освещенности сопротивление фоторезистора падает. Соответственно, повышается напряжение на резисторе R1 и на выводе 2 ИС. Когда напряжение превысит напряжение на выводе 3, включится двигатель M. Порог срабатывания регулируется подстроечным резистором R1 4,7 кОм. Такая схема является основной для управления «солнечным шаром», описанным в гл. 12.Рис. 5.7. Выключатель света на фоторезисторе
Светочувствительный нейрон
На рис. 5.8 изображена схема светочувствительного нейрона. По мере нарастания освещенности возрастает частота выходных импульсов. Такая схема фотонейрона может генерировать тактовые импульсы для контроллера шагового двигателя типа ИС UCN5804. При увеличении интенсивности освещенности поворот шагового двигателя осуществляется быстрее.Рис. 5.8. Нейрон на базе фоторезистора
Фотоэлектрические устройства
Фотоэлектрические (солнечные) элементы, фотодиоды и фототранзисторы имеют похожую конструкцию. Все они обладают светочувствительным PN переходом. В солнечных батареях площадь PN перехода велика и используется для вырабатывания электрической энергии пропорционально степени освещенности.
Фотодиоды обычно используются в схемах в обратном включении. Световой поток уменьшает запирающий барьер PN перехода, и через диод начинает течь ток. Время срабатывания фотодиодов намного меньше, чем CdS фоторезисторов, поэтому они могут быть использованы для детектирования модулированных световых сигналов.
Фототранзисторы представляют собой светочувствительные транзисторы. Их преимущество в сравнении со светодиодами в том, что они способны усиливать поступающий световой сигнал.
Датчики ИК излучения
Датчики ИК излучения работают в диапазоне низких частот излучения световых волн (900 нм и ниже). Они заслуживают специального рассмотрения, поскольку широко используются в роботах для ориентирования, обхода препятствий и связи.
Конец бесплатного ознакомительного фрагмента
Устройство управления двигателем постоянного тока — Меандр — занимательная электроника
При включении и выключении двигателей постоянного тока (ДПТ), работающих в паре с пластмассовыми редукторами, возникает удар, который постепенно разрушает редуктор. Предлагаемое устройство позволяет плавно подавать и снимать нагрузку с редуктора, и может быть использовано для регулировки скорости в ДПТ, плавного пуска и остановки ДПТ, например, при закрытии/открытии жалюзи, подъема/опускания ролетов и в других т.п. устройствах.
Детский электрический автомобиль
Устройство разработано для детских электрических автомобилей с питанием от аккумуляторной батареи 6 В 10 А*ч. Автомобиль управляется по радиоканалу с пульта управления, находящимся в руках родителя, идущего рядом с автомобилем. Для того чтобы маленькие дети не пугались при движении с большой скоростью, устройство снабжено переключателем скоростей. Поскольку в устройстве применено питание двигателя импульсами ШИМ, то скорости переключаются подачей на ДПТ импульсов с заполнением 50%, 60%, 80% и 100%.
Алгоритм работы
Предлагаемое устройство разрабатывалось с условием минимального изменения в электрической схеме автомобиля.
Устройство разработано на микроконтроллере РIС16F676. Алгоритм работы программы микроконтроллера показан на рис.1. После пуска и инициализации микроконтроллера определяется установленная скорость и включается флаг выбранной скорости. Далее определяется направление движения: прямой ход, реверсивный ход, либо отсутствие движения — стоп, и устанавливаются соответствующие флаги направления.
Рис. 1
Если направление движения не выбрано, то сигнала «Пуск» нет, и программа переходит на ожидание прерывания. Если «Пуск» включен, то по флагу определяется направление движения и отрабатывается прямой ход или обратный.
Длительность управляющего импульса пуска при прямом и обратном ходе формируется одинаково, но на разные выходы. Один выход, который включает «земляной» провод двигателя, включается сразу, а на втором выходе длительность импульса включения увеличивается после каждого прерывания. Чем большее число прерываний произошло с момента начала пуска, тем на большее значение увеличивается длительность импульса.
Реализовано это с помощью подпрограммы задержки 37 мкс, умноженное на число регистра «сек», имеющего переменное значение, и изменяющееся после каждого прерывания. Прерывание по переполнению таймера ТМR0 происходит через 4 мс, делится делителем на 10 и увеличивает счетчик «сек». Таким образом, счетчик «сек» увеличивается на единицу через 40 мс. Значение этого счетчика при пуске выбрано равным 55, но может быть изменено пользователем в любую сторону. При данном значении счетчика «сек» время пуска равно 2,25 с, а длительность импульса плавно увеличивается до 75% полной мощности двигателя.
После отработки части пуска ожидается прерывание, и, если пуск еще не завершен, программа возвращается на определение скорости и направления. Если пуск выполнен, то программа отрабатывает выбранную скорость с частотой ШИМ, равной 125 Гц. Отработка скорости выполняется аналогично отработке пуска, но с постоянным временем задержки. Но если при пуске время задержки увеличивает длительность выходного импульса, то при работе время задержки определяет длительность паузы. Это необходимо для того, чтобы при отработке «стопа» еще больше увеличивать время паузы, сокращая таким образом длительность выходного импульса.
Если включен флаг «стопа», то при прерывании изменяются значения делителей. Делитель на 10 становится делителем на 1, а значение регистра «сек» может принимать значение либо 50, либо 70. Это зависит от включенного флага скорости. При скорости 50% регистр «сек» принимает значение 50, так как при больших значениях происходит перерегулировка и длительность паузы становится больше длительности импульса работы. При этом вместо того, чтобы уменьшать значение длительности импульса, она начинает возрастать. При таких значениях регистра «сек» время остановки двигателя равно 0,2 с (оно может быть изменено пользователем в любую сторону уменьшением или увеличением до 255 значения регистра «сек»), а длительность выходного импульса плавно уменьшается до нуля.
После отработки длительности импульса скорости или стопа программа повторяется с определения скорости.
Работа устройства
Принципиальная электрическая схема устройства показана на рис.2. Выходы микроконтроллера DD1 RC0-RC3 управляют ключами VT1-VT4, которые открывают полевые транзисторы VT5-VT8, подающие напряжение в необходимой полярности на двигатель постоянного тока М1. На входы RA4, RA5 ИМС DD1 через переключатели SA1, SA2 подается лог. «0», определяя выбранную скорость. Программно входы RA4, RA5 подтянуты внутренними резисторами микроконтроллера к плюсу питания. Значения выбранных скоростей в зависимости от состояния входов приведены слева внизу на рис.2.
Рис. 2
На входы RC4, RC5 также подается напряжение от БУ автомобиля, определяя выбранное направление движения. Поскольку при полностью заряженной аккумуляторной батарее (АКБ) автомобиля напряжение на ней превышает максимально допустимое для входов микроконтроллера, то установлены делители напряжения R2, R9 и R3, R8.
Вначале был изготовлен вариант устройства с питанием от АКБ автомобиля, но при уменьшении напряжения на АКБ вследствие ее разряда полевые транзисторы открывались не полностью, и их внутреннее сопротивление увеличивалось. Увеличивалось и падение напряжения на транзисторах, и они грелись. Поэтому для питания микроконтроллера и ключевых транзисторов была установлена дополнительная батарея GB1 с напряжением 9 В. Стабилизатор напряжения DA1 необходим только для питания ИМС микроконтроллера DD1. Потребляемый ток от батареи GB1 составляет 15…25 мА. Меньшее потребление тока будет при максимальной скорости вращения двигателя.
Конструкция и детали
Схема подключения устройства в сеть автомобиля показана на рис.3. Пунктиром показано штатное соединение. Под сиденьем автомобиля имеется ниша для второго АКБ и много свободно го места. Сняв сиденье и крышку ниши АКБ, увидите пару проводов, идущих от АКБ, и пару проводов, идущих к двигателю. Один провод, как правило, черный — «минусовой», а второй провод — красный (может быть и желтым, белым) — «плюсовой». В назначении проводов можно убедиться, посмотрев на клеммы АКБ. Провод, идущий от БУ к двигателю, необходимо отпаять от двигателя и припаять к плате. Поскольку провод толстый, то лучше предварительно припаять к нему тонкие провода, которые легко паять к плате. Провода питания, идущие от АКБ к плате и от платы на двигатель, необходимо брать сечением не менее 1 мм2. Выключатель напряжения SA3 лучше установить на крышке ниши АКБ под сиденьем или сзади корпуса автомобиля. Разводку 9 В питания можно выполнить любым монтажным проводом. Батарею GB1 и плату можно закрепить в любом удобном месте.
Рис. 3
Печатная плата устройства и схема расположения элементов показаны на рис.4 и рис.5 соответственно.
Рис. 4
Рис. 5
МОSFЕТ-транзисторы \/Т5-\/Т8 могут быть любыми импортными с буквенным индексом L, с током стока не менее 10 А или отечественные с аналогичными параметрами. Чем больше допустимый
ток стока, тем меньших размеров нужен радиатор для транзистора. При 10-кратном запасе по току, радиатор может вообще не понадобиться. Конечно, это при условии, что транзистор открывается полностью. Большую нагрузку испытывают транзисторы, работающие в ключевом режиме, т.е. VT7, VТ8.
Транзисторы VT1-VT4 могут быть любыми структуры n-р-n. Переключатели скоростей SА1, SА2 лучше заменить одним движковым и установить его на передней панели автомобиля. В качестве батареи GB1 лучше применить 2 батареи типа 3R12, которых хватит на весь сезон.
Работа с устройством
Перед подачей напряжения на БУ автомобиля, необходимо подать напряжение на плату устройства. Напряжение питания 6 В и 9 В на плату должно подаваться одновременно. При движении вперед и переключении назад сначала отрабатывается время стопа, затем время пуска в выбранном направлении. При выключении движения отрабатывается время стопа, а при включении — время пуска.
Скачать файлы abtou.asm и abtou.hex, а также печатная плата в формате .lay
Автор: Николай Заец, г. Азов, Ростовской обл.
Источник: Радиоаматор №5, 2015
Схема управления шагового двигателя. Создаем робота-андроида своими руками [litres]
Схема управления шагового двигателя
На рис. 4.8В показана схема управления шагового двигателя. Используется однополярный двигатель с шестью выводами. ИС U1 представляет собой управляемый напряжением таймер серии 555, который в режиме генерации выдает прямоугольные тактовые импульсы на вывод 3. ИС U2 типа UCN5804 является контроллером шагового двигателя. Тактовые импульсы, поступающие на вывод 11 ИС UCN5804, поворачивают ротор шагового двигателя, причем каждому импульсу соответствует один шаг поворота. Повышение частоты тактовых импульсов приводит к увеличению скорости вращения шагового двигателя.

Рис. 4.8В. Шаговый двигатель – схема управления
В данной несложной схеме тактовые импульсы производятся таймером серии 555. Такие импульсы можно генерировать с помощью микроконтроллера (см. гл. 6) или светочувствительного нейрона (см. гл. 5). Переключатель SW1 изменяет диапазон тактовых импульсов медленно/быстро. Переключателем SW2 можно изменить направление вращения ротора двигателя.
Шаговые двигатели можно использовать для создания робота-платформы (см. гл. 10).
Данный текст является ознакомительным фрагментом.Читать книгу целиком
Поделитесь на страничкеСледующая глава >