


принцип работы, схемы подключения, характеристики
В современных станках и высокоточном оборудовании, где важно контролировать положение конструктивных элементов устанавливается индуктивный датчик. Для чего применяется данное устройство, какие разновидности и способы подключения существуют, как оно работает, мы рассмотрим в данной статье.
Назначение
Индуктивный датчик предназначен для контроля перемещения рабочего органа без непосредственного контакта с ним. Основной сферой применения для него является станочное оборудование, точные медицинские приборы, системы автоматизации технологических процессов, измерения и контроля формы изделия. В соответствии с положениями п.2.1.1.1 ГОСТ Р 50030.5.2-99 это датчик, который создает электромагнитное поле в области чувствительности и обладает полупроводниковым коммутатором.
Сфера применения индуктивных датчиков во многом определяется их высокой надежностью и устойчивостью к воздействию внешних факторов.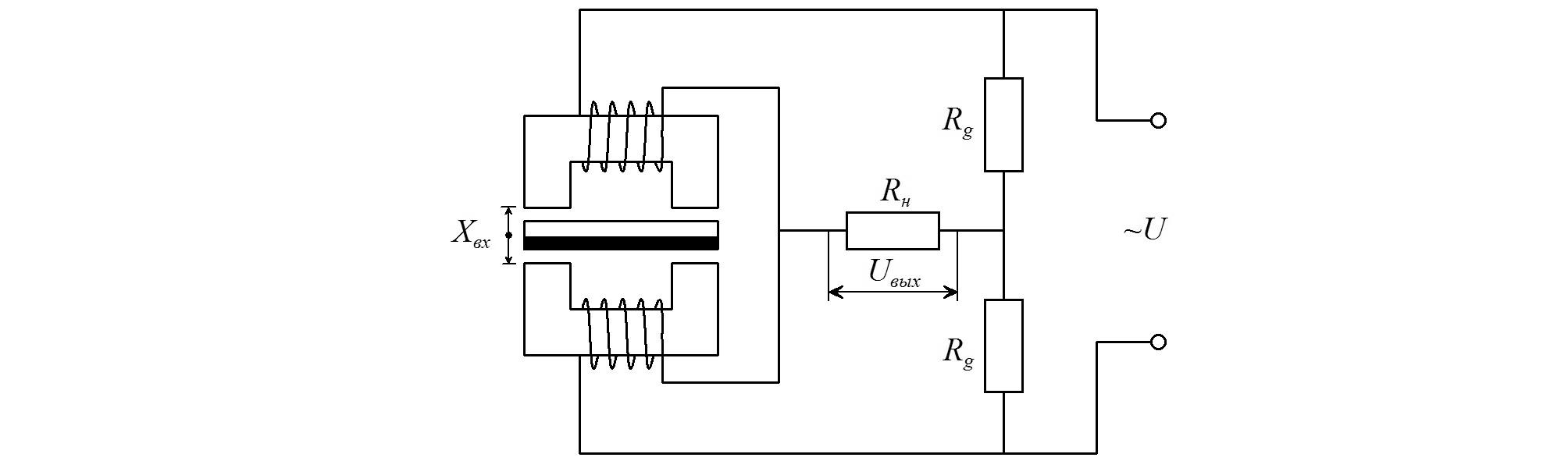
Устройство
Развитие сегмента радиоэлектроники привело не только к совершенствованию первоначальных механизмов, но и к возникновению принципиально новых индуктивных датчиков. В качестве примера рассмотрим один из простейших вариантов (рисунок 1):
Рис. 1. Устройство индуктивного датчикаКак видите на рисунке, в его состав входят:
- магнитопровод или ярмо (1) – предназначен для передачи электромагнитного поля от генератора в зону чувствительности;
- катушка индуктивности (2) – создает переменное электромагнитное поле при протекании электрического тока по виткам;
- объект измерения (3) – металлический якорь, вводимый или перемещаемый в области чувствительности, неметаллические предметы не способные влиять на состояние электромагнитного поля, поэтому они не используются в качестве детектора;
- зазор между объектом измерения и основным магнитопроводом (4) – обеспечивает меру взаимодействия в качестве магнитного диэлектрика, в зависимости от модели датчика и способа перемещения может оставаться неизменным или колебаться в заданном диапазоне;
- генератор (5) — предназначен для генерации электрического напряжения заданной частоты, которое будет создавать переменное магнитное поле в заданной области.


Принцип работы
Принцип действия индуктивного датчика заключается в способности электромагнитного поля изменять свои параметры, в зависимости от значения магнитной проводимости на пути протекания потока. В основе его работы лежит классический вариант катушки, намотанной на сердечник.
Рис. 2. Магнитное поле в состоянии покояПри протекании электрического тока I по виткам этой катушки генерируется магнитное поле (см. рисунок 2), результирующий вектор магнитной индукции B которого определяется по правилу Правой руки. При движении магнитного поля по сердечнику, ферромагнитный материал обеспечивает максимальную пропускную способность. Но, как только линии магнитной индукции попадают в воздушное пространство, магнитная проводимость существенно ухудшается и часть поля рассеивается.
При внесении в область действия поля индуктивного датчика объекта срабатывания (рисунок 3), изготовленного из металла, напряженность линий индукции резко изменяется.
Расстояние срабатывания и объект воздействия
В зависимости от конструкции и принципа действия индуктивного датчика объект воздействия может иметь вертикальное или горизонтальное перемещение относительно самого измерителя. Однако реакция сенсора на начало движения контролируемого объекта может начинаться не сразу, что обуславливается номинальным расстоянием, при котором обеспечивается зона чувствительности датчика и техническими параметрами объекта.
Как видите на рисунке 4, в первом положении контролируемый объект находится на таком удалении, где электромагнитные линии не достигают его поверхности. В таком случае с индуктивного датчика сигнал сниматься не будет, так как он не фиксирует перемещения в зоне чувствительности. Во втором положении контролируемый объект уже пересек расстояние срабатывания и вошел в чувствительную зону. В результате взаимодействия с объектом на выходе датчика появится соответствующий сигнал.
Во втором положении контролируемый объект уже пересек расстояние срабатывания и вошел в чувствительную зону. В результате взаимодействия с объектом на выходе датчика появится соответствующий сигнал.
Также расстояние срабатывания будет зависеть от геометрических размеров, формы и материала. Следует заметить, что в качестве объекта срабатывания индуктивного датчика применяются только металлические предметы, но от конкретного типа будет отличаться и момент перехода датчика в противоположное состояние, что изображено на диаграмме:
Виды
На практике существует огромное разнообразие индуктивных датчиков, всех их можно разделить на две большие категории, в зависимости от рода питающего тока – переменного и постоянного. В зависимости от состояния контактов в соответствии с таблицей 1 р.3 ГОСТ Р 50030.5.2-99 индуктивные датчики бывают:
- замыкающий – при перемещении контролируемого объекта происходит перевод во включенное положение;
- размыкающий – в случае воздействия индуктивный датчик переводит контакты в отключенное положение;
- переключающий – одновременно объединяет оба предыдущих варианта, за одну коммутацию переводит один вывод во включенное, второй, в отключенное положение.

По количеству измерительных цепей индуктивные датчики подразделяются на одинарные и дифференциальные. Первый из них обладает одной катушкой и одной цепью измерения. Второй тип подразумевает наличие двух сенсоров, измерительные цепи которых включаются в противофазу для сравнения показаний.
По способу передачи данных индуктивные датчики подразделяются на аналоговые, электронные и цифровые. В первом случае применяются те же катушки и ферромагнитные сердечники. Электронные используют триггер Шмидта вместо ферромагнетиков для получения гистерезисной составляющей. Цифровые выполняются в формате печатных плат на микросхемах. Помимо этого виды подразделяются по количеству выводов датчика: два, три, четыре или пять.
Характеристики (параметры)
При выборе индуктивного датчика для решения конкретной задачи руководствуются параметрами цепи, в которых он будет функционировать и основной логикой схемы.
- напряжение питания – определяет допустимый минимум и максимум разности потенциалов, при которой индуктивный датчик нормально работает;
- минимальный ток срабатывания – наименьшее значение нагрузки, при котором произойдет переключение;
- расстояние срабатывания – допустимый промежуток удаления, при котором будет происходить коммутация;
- индуктивное и магнитное сопротивление – определяет проводимость электрического тока и линий магнитной индукции для конкретной модели;
- поправочный коэффициент – применяется для внесения поправки, в зависимости от дополнительных факторов;
- частота переключений – максимально возможное количество раз коммутации в течении секунды;
- габаритные размеры и способ установки.
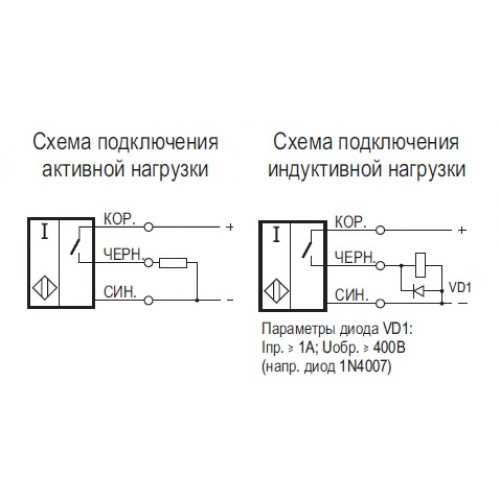
Примеры подключения на схемах
Конструктивные особенности индуктивных датчиков определяют количество их выводов и способ дальнейшего подключения. В виду того, что существует четыре наиболее распространенных типа, рассмотрим примеры схем их подключения.
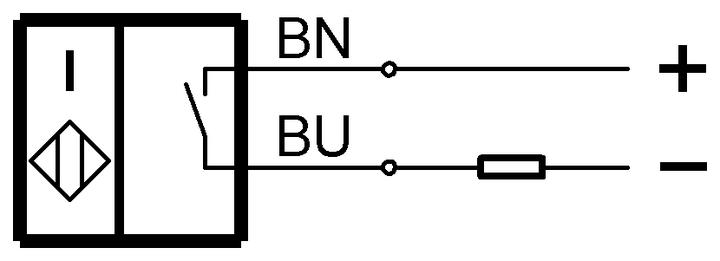
Двухпроводных датчиков индуктивности
Рис. 7. Схема подключения двухпроводного датчикаКак видите на схеме выше, двухпроводные индуктивные датчики применяются исключительно для непосредственной коммутации нагрузки: контакторов, пускателей, катушек реле в качестве электронного выключателя. Это наиболее простая схема и модель, но работа конкретной модели сильно зависит от параметров подключаемой нагрузки.
Трехпроводных датчиков индуктивности
Рис. 8. Схема подключения трехпроводного датчика индуктивностиВ трехпроводной схеме присутствует два вывода на питание самого индуктивного датчика, а третий, предназначен для подключения нагрузки к нему. По способу коммутации их подразделяют на PNP и NPN, первый вид коммутирует положительный вывод, откуда и происходит название, второй тип коммутирует отрицательный вывод.
Четырехпроводных датчиков индуктивности
Рис. 9. Схема подключения четырехпроводного датчика индуктивностиПо аналогии с предыдущим датчиком, четырехпроводный также использует два вывода 1 и 3 для получения питания. А вот 2 и 4 вывод используется для подключения нагрузки с той разницей, что коммутация для обеих нагрузок будет противоположной.
Пятипроводных датчиков индуктивности
Рис. 10. Схема подключения пятипроводного датчика индуктивностиВ пятипроводном индуктивном датчике два вывода применяются для подачи напряжения на чувствительный элемент датчика, в рассматриваемом примере это 1 и 3. Два вывода 2 и 4 подают питание на разные нагрузки, а управляющий вывод 5 позволяет выбирать различные режимы работы и менять логику переключений.
Преимущества и недостатки
В сравнении с другими типами сенсорных устройств индуктивные датчики продолжают занимать весомую нишу, наращивая темпы внедрения в различные сферы промышленности и отрасли народного хозяйства. Такое частое применение объясняется рядом весомых преимуществ:
Такое частое применение объясняется рядом весомых преимуществ:
- высокая надежность за счет простой конструкции и отсутствия подвижных контактов;
- может функционировать как от бытовой сети, так и от специальных генераторов, преобразователей и прочих источников питания;
- способны обеспечивать значительную мощность на выходе — порядка нескольких десятков Ватт;
- характеризуются высокой чувствительностью в зоне измерения.
Но, вместе с тем, существуют и недостатки индуктивных датчиков, которые не позволяют использовать их повсеместно. Среди наиболее существенных минусов являются громоздкие размеры, не позволяющие монтировать их в любых устройствах. Также к недостаткам относится зависимость параметров работы от температурных и других факторов, вносящих поправку на точность.
Использованная литература
- Алейников А.Ф., Гридчин В.А., Цапенко М.П. «Датчики» 2001
- Келим Ю. М. «Типовые элементы систем автоматического управления» 2002.
- В.В. Литвиненко, А.П. Майструк. «Автомобильные датчики, реле и переключатели» 2004
- Соснин Д. А. «Автотроника. Электрооборудование и системы бортовой автоматики современных легковых автомобилей» 2001
Индуктивный датчик. Принцип работы и подключение
Индуктивный датчик (inductive sensor) – это датчик бесконтактного типа, предназначенный для контроля положения объектов из металла.
Принцип работы
Работа индуктивного датчика основана на взаимодействии магнитного поля катушки, расположенной внутри датчика, и металла, из которого состоит объект.
При приближении металлического объекта (5) к катушке (3), магнитное поле (4) изменяется, что в свою очередь заставляет компаратор (2) сформировать сигнал, который впоследствии поступит на усилитель (1) и далее в цепь управления.
Параметры
Напряжение питания – диапазон напряжения, при котором датчик работает корректно.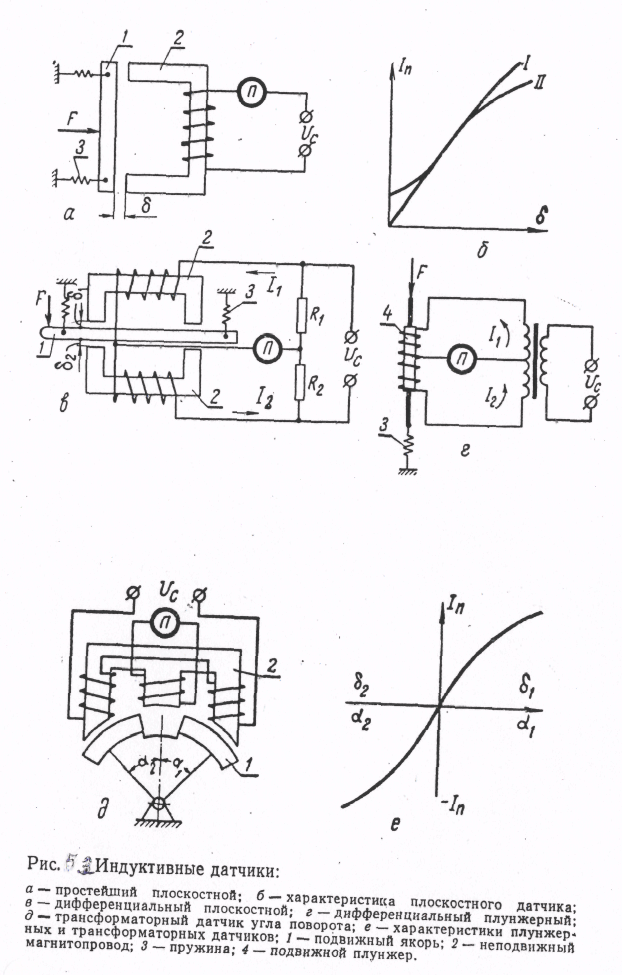
Максимальный ток переключения — количество непрерывного тока, которое пропускаясь через датчик, не вызывает повреждение датчика.
Минимальный ток переключения — минимальное значение тока, которое должно протекать через датчик, чтобы гарантировать работу.
Рабочее расстояние (Sn) – максимальное расстояние от поверхности датчика, до квадратного куска железа толщиной 1 мм в осевом направлении. Расстояние будет уменьшаться для других материалов, зависимость Sn от материала представлена в таблице.
|
Железо |
1 x Sn |
|
Нержавеющая сталь |
0,9 х Sn |
|
Латунь — бронза |
0,5 x Sn |
|
Алюминий |
0,4 x Sn |
|
Медь |
0,4 x Sn |
Частота переключения — максимальное количество переключений датчика в секунду.
Способ подключения
Способ подключения зависит от типа индуктивного датчика.
Трехпроводные – два вывода отвечают за питание датчика, а третий подключается к нагрузке. В зависимости от структуры (NPN или PNP) нагрузка подключается к положительному (NPN) или отрицательному (PNP) полюсу источника постоянного напряжения.
Четырехпроводные – два вывода питания, два вывода подключаются к нагрузке.
Существуют также двух и пятипроводные датчики, но используются они реже из-за особенностей подключения.
Индуктивный датчик LJ12A3-4-Z/BX
Рассмотрим стандартный датчик, который наиболее часто используется в ЧПУ-станках или 3d-принтерах в качестве концевого выключателя. Датчик имеет 3 вывода и NPN структуру. Размеры датчика 12×50мм, расстояние обнаружения 4мм. Напряжение питания 6-36 В.
На реальном примере продемонстрируем работу датчика. В качестве нагрузки подключаем светодиод с токоограничивающим резистором, а затем подносим металлическую пластину к датчику.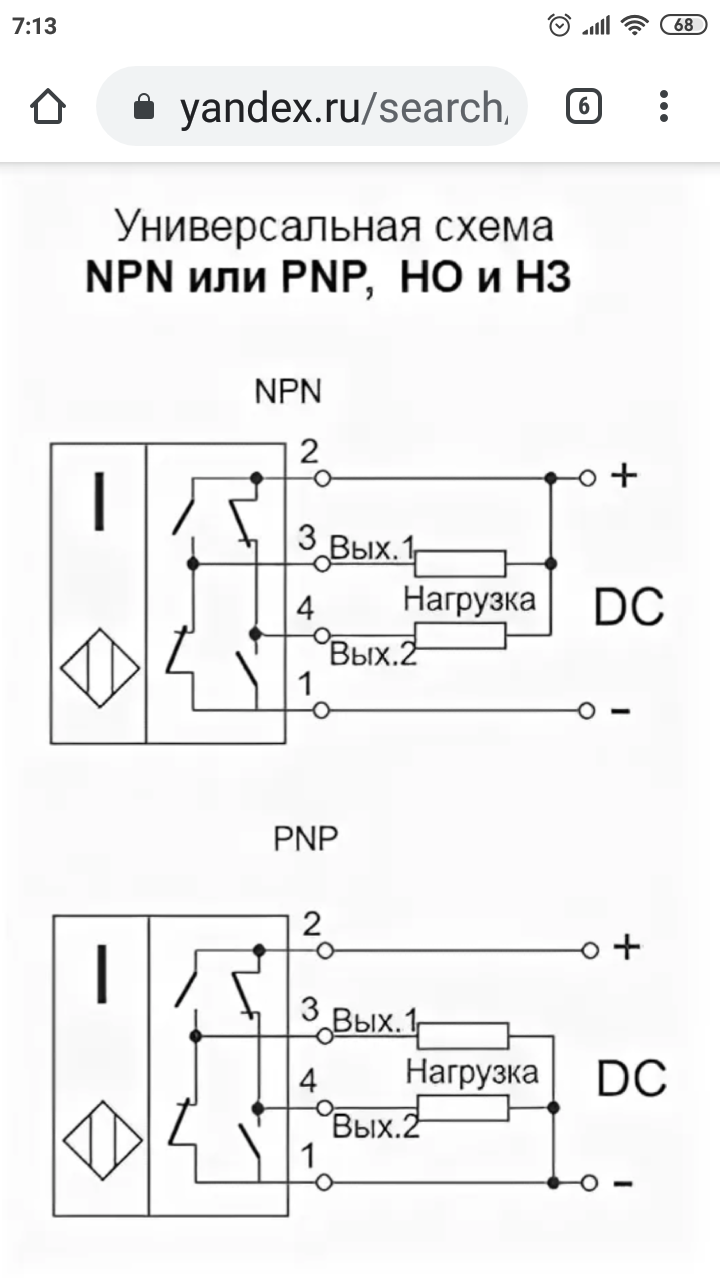
На расстоянии менее 4 мм от пластины, датчик срабатывает и подает напряжение на нагрузку через нормально разомкнутый контакт (NO).
Практические схемы включения датчиков
Бесконтактный датчик индуктивности позиционируется как сенсор, способный реагировать на металлические предметы, оказавшиеся в его электромагнитном поле. Благодаря этому свойству индуктивных бесконтактных датчиков удается отслеживать перемещение подвижных частей оборудования и при необходимости отключать двигатель приводного механизма. Для распознавания и анализа изменений магнитного поля в их состав вводится специальный электронный узел, называемый контроллером (компаратором).
Блок: 1/6 | Кол-во символов: 485
Источник: https://StrojDvor.ru/elektrosnabzhenie/princip-raboty-i-podklyuchenie-induktivnyx-datchikov/
Схемы подключения 3 и 4 проводных бесконтактных выключателей
Блок: 2/4 | Кол-во символов: 62
Источник: https://www. e-automation.ru/taxonomy/term/43
e-automation.ru/taxonomy/term/43
Режимы работы пускателей
Пускатели должны работать в одном или нескольких из следующих режимов: продолжительном, прерывисто-продолжительном (8-часовом), повторно-кратковременном, кратковременном. Продолжительность включения для повторно-кратковременного режима указывается в технических данных конкретных пускателей.
Пускатели выпускаются в исполнениях с разной степенью защиты от прикосновения и внешних воздействий ( IP OO , IP 20, IP 30, IP 40, IP 54).
Блок: 2/4 | Кол-во символов: 453
Источник: https://powercoup.by/stati-po-elektromontazhu/magnitnyiy-puskatel
Схемы подключения датчиков PNP и NPN
Отличие PNP и NPN датчиков в том, что они коммутируют разные полюсы источника питания. PNP (от слова “Positive”) коммутирует положительный выход источника питания, NPN – отрицательный.
Ниже для примера даны схемы подключения датчиков с транзисторным выходом. Нагрузка – как правило, это вход контроллера.
PNP выход датчика. Нагрузка (Load) постоянно подключена к “минусу” (0V), подача дискретной “1” (+V) коммутируется транзистором. НО или НЗ датчик – зависит от схемы управления (Main circuit)
NPN выход датчика. Нагрузка (Load) постоянно подключена к “плюсу” (+V). Здесь активный уровень (дискретный “1”) на выходе датчика – низкий (0V), при этом на нагрузку подается питание через открывшийся транзистор.
Призываю всех не путаться, работа этих схем будет подробно расписана далее.
На схемах ниже показано в принципе то же самое. Акцент уделён на отличия в схемах PNP и NPN выходов.
Схемы подключения NPN и PNP выходов датчиков
На левом рисунке – датчик с выходным транзистором NPN. Коммутируется общий провод, который в данном случае – отрицательный провод источника питания.
Справа – случай с транзистором PNP на выходе. Этот случай – наиболее частый, так как в современной электронике принято отрицательный провод источника питания делать общим, а входы контроллеров и других регистрирующих устройств активировать положительным потенциалом.
Блок: 2/13 | Кол-во символов: 1386
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
Подключение магнитного пускателя
Чтобы подключить магнитный пускатель нужно понять его принцип действия, изучить конструктивные особенности. Тогда, несмотря на кажущуюся сложность схемы подключения вам не составит труда правильно подключить магнитный пускатель, даже если до этого вам никогда не приходилось иметь дело с ним.
Схема подключения нереверсивного магнитного пускателя
Схема состоит:
- QF — автоматического выключателя
- KM1 — магнитного пускателя
- P — теплового реле
- M — асинхронного двигателя
- ПР — предохранителя
- (С-стоп, Пуск) — кнопки управления
Рассмотрим работу схемы в динамике. Включаем питание QF — автоматическим выключателем, нажимаем кнопку «Пуск» своим нормально разомкнутым контактом подает напряжение на катушку КМ1 — магнитного пускателя.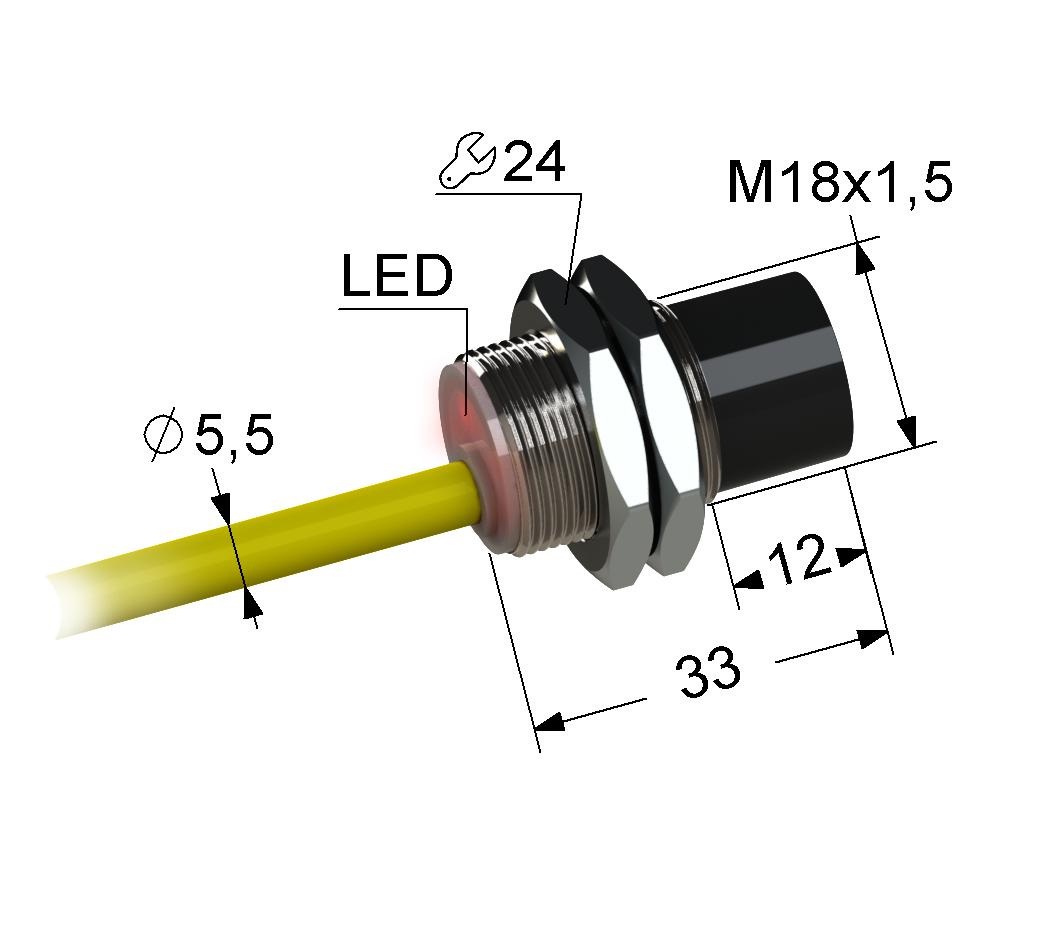 КМ1 – магнитный пускатель срабатывает и своими нормально разомкнутыми, силовыми контактами подает напряжение на двигатель. Для того чтобы не удерживать кнопку «Пуск», чтобы двигатель работал, нужно ее зашунтировать, нормально разомкнутым блок контактом КМ1 – магнитного пускателя. При срабатывании пускателя блок контакт замыкается и можно отпустить кнопку «Пуск» ток побежит через блок контакт на КМ1 — катушку.Такую схему называют схемой самоблокировки. Она обеспечивает так называемую нулевую защиту электродвигателя.
КМ1 – магнитный пускатель срабатывает и своими нормально разомкнутыми, силовыми контактами подает напряжение на двигатель. Для того чтобы не удерживать кнопку «Пуск», чтобы двигатель работал, нужно ее зашунтировать, нормально разомкнутым блок контактом КМ1 – магнитного пускателя. При срабатывании пускателя блок контакт замыкается и можно отпустить кнопку «Пуск» ток побежит через блок контакт на КМ1 — катушку.Такую схему называют схемой самоблокировки. Она обеспечивает так называемую нулевую защиту электродвигателя.
Если в процессе работы электродвигателя напряжение в сети исчезнет или значительно снизится (обычно более чем на 40% от номинального значения), то магнитный пускатель отключается и его вспомогательный контакт размыкается. После восстановления напряжения для включения электродвигателя необходимо повторно нажать кнопку «Пуск». Нулевая защита предотвращает непредвиденный, самопроизвольный пуск электродвигателя, который может привести к аварии. Аппараты ручного управления (рубильники, конечные выключатели) нулевой защитой не обладают, поэтому в системах управления станочным приводом обычно применяют управление с использованием магнитных пускателей. Для отключения электродвигателя достаточно нажать кнопку SB1 «Стоп». Это приводит к размыканию цепи самопитания и отключению катушки магнитного пускателя.
Для отключения электродвигателя достаточно нажать кнопку SB1 «Стоп». Это приводит к размыканию цепи самопитания и отключению катушки магнитного пускателя.
Отключаем двигатель, нажимаем кнопу «С – стоп», нормально замкнутый контакт размыкается и прекращается подача напряжение к КМ1 – катушке, сердечник пускателя под действием пружин возвращается в исходное положение, соответственно контакты возвращаются в нормальное состояние, отключая двигатель. При срабатывании теплового реле — «Р», размыкается нормально замкнутый контакт «Р», отключение происходит аналогично.
Принцип работы схемы магнитного пускателя с катушкой на 220В тот же, что и с катушкой на 380В
Схема подключения реверсивного магнитного пускателя
Схема состоит аналогично, так же, как на не реверсивной схеме, единственно добавилась кнопка реверса и магнитный пускатель. Принцип работы схемы немного сложнее, рассмотрим в динамике. Что требуется от схемы, реверс двигателя за счет переворачивания местами двух фаз.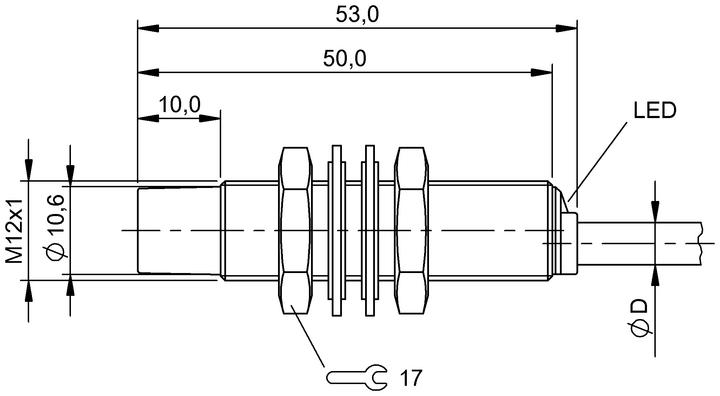 При этом нужна блокировка, которая не давала бы включиться второму пускателю, если первый находится в работе и наоборот. Если включить два пускателя одновременно то произойдет КЗ – короткое замыкание на силовых контактах пускателя.
При этом нужна блокировка, которая не давала бы включиться второму пускателю, если первый находится в работе и наоборот. Если включить два пускателя одновременно то произойдет КЗ – короткое замыкание на силовых контактах пускателя.
Включаем QF – автоматический выключатель, давим кнопку «Пуск » подаем напряжение на КМ1 катушку пускателя, пускатель срабатывает. Силовыми контактами включает двигатель, при этом шунтируется пусковая кнопка «Пуск ». Блокировка второго пускателя — КМ2 осуществляется, нормально замкнутым КМ1 — блок контактом. При срабатывании КМ1 — пускателя, размыкается КМ1 — блок контакт тем самым размыкает подготовленную цепочку катушки второго КМ2 — магнитного пускателя.
Чтобы осуществить реверс двигателя, его необходимо отключить. Отключаем двигатель, нажатием кнопку «С — стоп», снимается напряжение с катушки, которая находилась в работе. Пускатель и блок контакты под действием пружин возвращаются в исходное положение. Схема готова к реверсу, нажимаем кнопку «Пуск », подаем напряжение на катушку — КМ2, пускатель — КМ2 срабатывает и включает двигатель в противоположном вращение.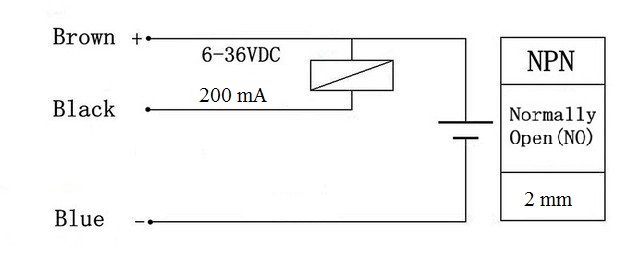 Кнопка «Пуск » шунтируется блок контактом — КМ2, а нормально замкнутый блок контакт КМ2 размыкается и блокирует готовность катушки магнитного пускателя — КМ1.
Кнопка «Пуск » шунтируется блок контактом — КМ2, а нормально замкнутый блок контакт КМ2 размыкается и блокирует готовность катушки магнитного пускателя — КМ1.
Для надежной работы схемы необходимо, чтобы главные контакты контактора КМ1 разомкнулись раньше, чем произойдет замыкание размыкающих вспомогательных контактов в цепи контактора КМ2. Это достигается соответствующей регулировкой положения вспомогательных контактов по ходу якоря.
При срабатывании теплового реле — «Р», размыкается нормально замкнутый контакт «Р», отключение происходит аналогично.
В серийных магнитных пускателях часто применяют двойную блокировку по приведенным выше принципам. Кроме того, реверсивные магнитные пускатели могут иметь механическую блокировку с перекидным рычагом, препятствующим одновременному срабатыванию электромагнитов контакторов. В этом случае оба контактора должны быть установлены на общем основании.
Блок: 3/4 | Кол-во символов: 4907
Источник: https://powercoup.by/stati-po-elektromontazhu/magnitnyiy-puskatel
Замена датчиков
Как я уже писал, есть принципиально 4 вида датчиков с транзисторным выходом, которые подразделяются по внутреннему устройству и схеме включения:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Все эти типы датчиков можно заменить друг на друга, т. е. они взаимозаменяемы.
е. они взаимозаменяемы.
Это реализуется такими способами:
- Переделка устройства инициации – механически меняется конструкция.
- Изменение имеющейся схемы включения датчика.
- Переключение типа выхода датчика (если имеются такие переключатели на корпусе датчика).
- Перепрограммирование программы – изменение активного уровня данного входа, изменение алгоритма программы.
Ниже приведён пример, как можно заменить датчик PNP на NPN, изменив схему подключения:
PNP-NPN схемы взаимозаменяемости. Слева – исходная схема, справа – переделанная.
Понять работу этих схем поможет осознание того факта, что транзистор – это ключевой элемент, который можно представить обычными контактами реле (примеры – ниже, в обозначениях).
Итак, схема слева. Предположим, что тип датчика – НО. Тогда (независимо от типа транзистора на выходе), когда датчик не активен, его выходные “контакты” разомкнуты, и ток через них не протекает. Когда датчик активен, контакты замкнуты, со всеми вытекающими последствиями. Точнее, с протекающим током через эти контакты)). Протекающий ток создает падение напряжения на нагрузке.
Точнее, с протекающим током через эти контакты)). Протекающий ток создает падение напряжения на нагрузке.
Внутренняя нагрузка показана пунктиром неспроста. Этот резистор существует, но его наличие не гарантирует стабильную работу датчика, датчик должен быть подключен к входу контроллера или другой нагрузке. Сопротивление этого входа и является основной нагрузкой.
Если внутренней нагрузки в датчике нет, и коллектор “висит в воздухе”, то это называют “схема с открытым коллектором”. Эта схема работает ТОЛЬКО с подключенной нагрузкой.
Так вот, в схеме с PNP выходом при активации напряжение (+V) через открытый транзистор поступает на вход контроллера, и он активизируется. Как того же добиться с выходом NPN?
Бывают ситуации, когда нужного датчика нет под рукой, а станок должен работать “прям щас”.
Смотрим на изменения в схеме справа. Прежде всего, обеспечен режим работы выходного транзистора датчика. Для этого в схему добавлен дополнительный резистор, его сопротивление обычно порядка 5,1 – 10 кОм.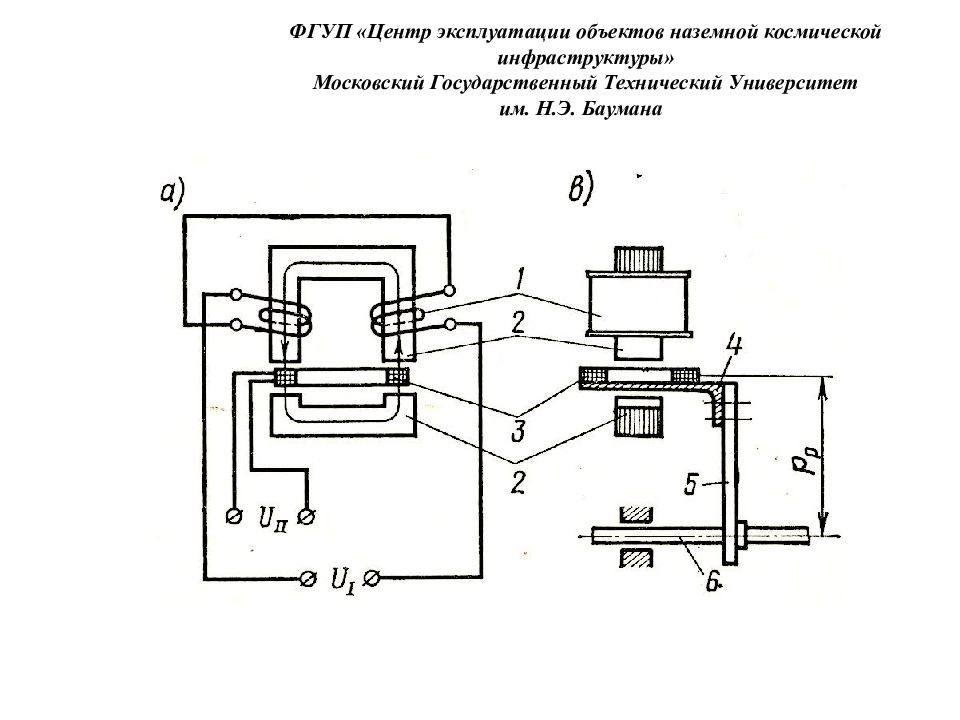 Теперь, когда датчик не активен, через дополнительный резистор напряжение (+V) поступает на вход контроллера, и вход контроллера активизируется. Когда датчик активен – на входе контроллера дискретный “0”, поскольку вход контроллера шунтируется открытым NPN транзистором, и почти весь ток дополнительного резистора проходит через этот транзистор.
Теперь, когда датчик не активен, через дополнительный резистор напряжение (+V) поступает на вход контроллера, и вход контроллера активизируется. Когда датчик активен – на входе контроллера дискретный “0”, поскольку вход контроллера шунтируется открытым NPN транзистором, и почти весь ток дополнительного резистора проходит через этот транзистор.
В данном случае происходит перефазировка работы датчика. Зато датчик работает в режиме, и контроллер получает информацию. В большинстве случаев этого достаточно. Например, в режиме подсчета импульсов – тахометр, или количество заготовок.
Да, не совсем то, что мы хотели, и схемы взаимозаменяемости npn и pnp датчиков не всегда приемлемы.
Как добиться полного функционала? Способ 1 – механически сдвинуть либо переделать металлическую пластинку (активатор). Либо световой промежуток, если речь идёт об оптическом датчике. Способ 2 – перепрограммировать вход контроллера чтобы дискретный “0” был активным состоянием контроллера, а “1” – пассивным. Если под рукой есть ноутбук, то второй способ и быстрее, и проще.
Если под рукой есть ноутбук, то второй способ и быстрее, и проще.
Блок: 4/13 | Кол-во символов: 3291
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
Подключение электродвигателя по схеме звезда и треугольник
Применяются основные способы подключения к сети трёхфазных электродвигателей: «подключение звездой» и «подключение треугольником».
При соединении трёхфазного электродвигателя звездой, концы его статорных обмоток соединяются вместе, соединение происходят в одной точке, а на начала обмоток подаётся трехфазное напряжение (рис 1).
При соединении трёхфазного электродвигателя по схеме подключения «треугольником» обмотки статора электродвигателя соединяются последовательно таким образом что конец одной обмотки соединяется началом следующей и так далее (рис 2).
Клеммные колодки электродвигателей и схемы соединения обмоток:
Не вдаваясь в технические и подробные теоретические основы электротехники необходимо сказать, что электродвигатели у которого обмотками, соединенные звездой работают плавнее и мягче, чем электродвигатели с соединенные обмотками в треугольником, необходимо отметить, что при соединении обмоток звездой электродвигатель не может развить полную мощность. При соединении обмоток по схеме треугольник электродвигатель работает на полную паспортную мощность (что составляет в 1,5 раз больше по мощности, чем при соединении звездой), но при этом имеет очень большие значения пусковых токов.
При соединении обмоток по схеме треугольник электродвигатель работает на полную паспортную мощность (что составляет в 1,5 раз больше по мощности, чем при соединении звездой), но при этом имеет очень большие значения пусковых токов.
В связи с этим целесообразно (особенно для электродвигателей с большей мощностью) подключение по схеме звезда — треугольник; первоначально запуск осуществляется по схеме звезда, после этого (когда электродвигатель «набрал обороты»), происходит автоматическое переключение по схеме треугольник.
Схема управления:
Подключение напряжения питания через контакт NC (нормально закрытый) реле времени К1 и контакт NC К2, в цепи катушки пускателя К3.
После включения пускателя К3, своими нормально-замкнутыми контактами размыкает цепи катушки пускателя К2 контактами К3 (блокировка случайного включения) и замыкает контакт К3, в цепи питания катушки магнитного пускателя К1, который совмещен с контактами реле времени.
При включении пускателя К1 происходит замыкание контактов К1 в цепи катушки магнитного пускателя К1 и одновременно включается реле времени, размыкается контакт реле времени К1 в цепи катушки пускателя К3, замыкает контакт реле времени К1 в цепи катушки пускателя К2.
Отключение обмотки пускателя К3, замыкается контакт К3 в цепи катушки магнитного пускателя К2. После включение пускателя К2, размыкает своими контактами К2 в цепи катушки питания пускателя К3.
Схема управления
На начала обмоток U1, V1 и W1 через силовые контакты магнитного пускателя К1 подаётся трехфазное напряжение. При срабатывании магнитного пускателя К3 с помощью его контактов К3, происходит замыкание, соединяя концы обмоток U2, V2 и W2 между собой обмотки двигателя соединены звездой.
Через некоторое время срабатывает реле времени, совмещённое с пускателем К1, отключая магнитный пускатель К3 и одновременно включая К2, замыкаются силовые контакты К2 и происходит подача напряжение на концы обмоток электродвигателя U2, V2 и W2. Таким образом электродвигатель включается по схеме треугольник.
Смотрите также по этой теме:
Реле промежуточное. Назначение, где применяются и как их выбирают?
Будем рады, если подпишетесь на наш Блог!
Блок: 4/4 | Кол-во символов: 3171
Источник: https://powercoup.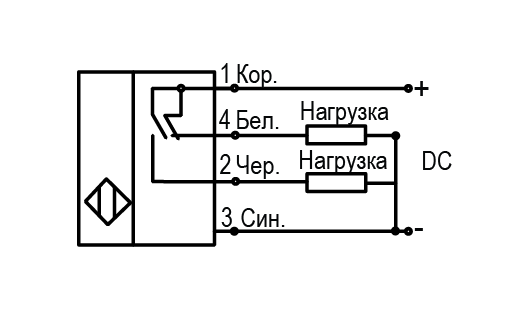 by/stati-po-elektromontazhu/magnitnyiy-puskatel
by/stati-po-elektromontazhu/magnitnyiy-puskatel
Условное обозначение датчика приближения
На принципиальных схемах индуктивные датчики (датчики приближения) обозначают по разному. Но главное – присутствует квадрат, повёрнутый на 45° и две вертикальные линии в нём. Как на схемах, изображённых ниже.
НО НЗ датчики. Принципиальные схемы.
На верхней схеме – нормально открытый (НО) контакт (условно обозначен PNP транзистор). Вторая схема – нормально закрытый, и третья схема – оба контакта в одном корпусе.
Блок: 5/13 | Кол-во символов: 457
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
Re: Подключение бесконтактного индуктивного датчика к ПЛК DV
alexandr22ru писал(а):Добрый день. Вариант с ТТР хорош, но дорогой. Был бы один двигатель, можно было бы приобрести, но двигателей 4. Расскажите по подробнее про промежуточное реле и его подключение к двигателю и контролеру? какое реле подобрать если двигатели 380В и сила тока 0,5А и 1,5А?
Промежуточное реле может быть:
— электромеханическим с катушкой постоянного тока
— отронным
— герконовым
Катушка реле на 24V DC подключается как нагрузка к дискретному выходу ПЛК. Схемы подключения и максимальный ток катушки (нагрузки на дискретный выход) есть в инструкции по эксплуатации конкретного ПЛК
Схемы подключения и максимальный ток катушки (нагрузки на дискретный выход) есть в инструкции по эксплуатации конкретного ПЛК
Через выходные контакты реле подключается катушка трехфазного пускателя. Тип питания (DC или AC) катушки пускателя выбирается «по вкусу».
Пускатель подбирается по электрическим параметрам двигателя.
Вот и все.
Блок: 5/5 | Кол-во символов: 930
Источник: https://www.delta-forum.ru/viewtopic.php?f=6&t=1431&start=10
Заключение
В мире электроники эти три типа датчиков находят все более широкое применение. С каждым годом производство этих датчиков растет и растет. Они используются абсолютно в разных областях промышленности. Автоматизация и роботизация без этих датчиков была бы невозможна. В этой статье я разобрал только простейшие датчики, которые выдают нам только сигнал “включен-выключен” или, если сказать на профессиональном языке, один бит информации. Более навороченные типы датчиков могут выдавать различные параметры и даже могут соединяться с компьютерами и другими устройствами напрямую.
Блок: 6/7 | Кол-во символов: 590
Источник: https://www.RusElectronic.com/beskontaktnye-datchiki/
Погрешности датчиков
Бесконтактный индуктивный датчик
Погрешность снятия показаний контрольной системой существенно влияет на работу бесконтактного индуктивного датчика. Ее общая величина набирается из отдельных ошибок измерений по различным показателям: электромагнитным, температурным, аппаратным, магнитной упругости и многим другим.
Электромагнитная погрешность определяется как случайно проявляющаяся величина. Она появляется из-за паразитной ЭДС, наведенной в катушке внешними магнитными полями. В производственных условиях этот компонент создается силовым оборудованием с рабочей частотой 50 Герц. Температурная погрешность – один из важнейших показателей, поскольку работать большинство датчиков могут лишь в определенном диапазоне температур. Она обязательно учитывается при проектировании устройств этого класса.
Погрешность магнитной упругости вводится как показатель нестабильности деформаций сердечника, возникающей в процессе сборки прибора, а также как тот же фактор, но проявляющийся при его работе. Нестабильности внутренних напряжений в магнитопроводе приводит к ошибкам в обработке выходного сигнала. Погрешность, возникающая в самом чувствительном устройстве, проявляется из-за влияния полевой структуры на коэффициент деформации металлических элементов датчика. Кроме того, на ее суммарное значение существенно влияют люфты и зазоры в подвижных частях конструкции.
Нестабильности внутренних напряжений в магнитопроводе приводит к ошибкам в обработке выходного сигнала. Погрешность, возникающая в самом чувствительном устройстве, проявляется из-за влияния полевой структуры на коэффициент деформации металлических элементов датчика. Кроме того, на ее суммарное значение существенно влияют люфты и зазоры в подвижных частях конструкции.
Погрешность соединительного кабеля набирается из отклонений величины сопротивления его проводных жил в зависимости от температурного фактора, а также как наводки посторонних электромагнитных полей и ЭДС. Тензометрическая погрешность как случайная величина зависит от качества изготовления намоточных элементов датчика (его катушки, в частности). В различных условиях эксплуатации возможно изменение сопротивления обмотки по постоянному току, приводящее к «плаванию» выходного сигнала. Погрешность старения проявляется вследствие износа подвижных элементов датчика, а также изменения электромагнитных свойств магнитопровода.
Проверить реальную величину этого параметра удается только с помощью сверхточных измерительных приборов. При этом обязательно принимаются во внимание кинематические особенности самого датчика. При проектировании и изготовлении чувствительных элементов такая возможность заранее учитывается в его конструкции.
Для индуктивных и емкостных датчиков характерны режимы работы со многими факторами влияния, определяемыми конкретными условиями эксплуатации. Именно поэтому выбор подходящих для данной марки прибора чувствительности и набора выходных параметров является определяющим при его использовании в качестве конечного выключателя.
Блок: 6/6 | Кол-во символов: 2646
Источник: https://StrojDvor. ru/elektrosnabzhenie/princip-raboty-i-podklyuchenie-induktivnyx-datchikov/
ru/elektrosnabzhenie/princip-raboty-i-podklyuchenie-induktivnyx-datchikov/
Система обозначений индуктивных датчиков
Тип датчика обозначается цифро-буквенным кодом, в котором зашифрованы основные параметры датчика. Ниже приведена система маркировки популярных датчиков Autonics.
Система обозначений датчиков Autonics
Блок: 7/13 | Кол-во символов: 242
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
Купить индуктивный датчик
В нашем радиомагазине индуктивные датчики стоят в 5 раз дороже, чем если бы их заказывать с Китая с Алиэкспресса.
Вот здесь можете глянуть разнообразие индуктивных датчиков.
Блок: 7/7 | Кол-во символов: 200
Источник: https://www.RusElectronic.com/beskontaktnye-datchiki/
Скачать инструкции и руководства на некоторые типы индуктивных датчиков:
• Autonics_PR / Индуктивные датчики приближения. Подробное описание параметровэ, pdf, 135. 28 kB, скачан: 2171 раз./
28 kB, скачан: 2171 раз./
• Autonics_proximity_sensor / Каталог датчиков приближения Autonics, pdf, 1.73 MB, скачан: 1237 раз./
• Omron_E2A / Каталог датчиков приближения Omron, pdf, 1.14 MB, скачан: 1589 раз./
• ТЕКО_Таблица взаимозаменяемости выключателей зарубежных производителей / Чем можно заменить датчики ТЕКО, pdf, 179.92 kB, скачан: 1273 раз./
• Turck_InduktivSens / Датчики фирмы Turck, pdf, 4.13 MB, скачан: 1793 раз./
• pnp npn / Схема включения датчиков по схемам PNP и NPN в программе Splan/ Исходный файл., rar, 2.18 kB, скачан: 2580 раз./
Блок: 8/13 | Кол-во символов: 722
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
Реальные датчики
Датчики купить проблематично, товар специфический, и в магазинах электрики такие не продают. Как вариант, их можно купить в Китае, на АлиЭкспрессе.
А вот какие оптические датчики я встречаю в своей работе.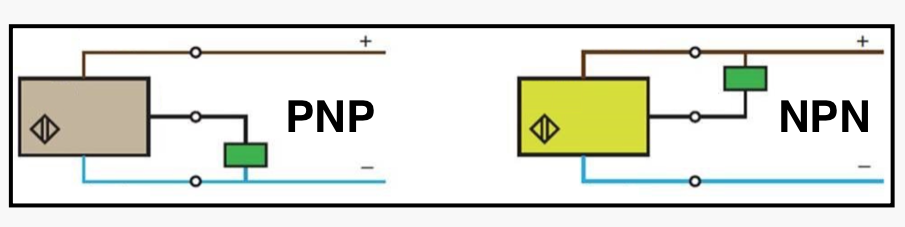
Всем спасибо за внимание, жду вопросов по подключению датчиков в комментариях!
Понравилось? Поставьте оценку, и почитайте другие статьи блога!
Свежие статьи на СамЭлектрик.ру:
Блок: 9/13 | Кол-во символов: 425
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
УЗО: Характеристики устройств дифференциальной защиты
Настало время рассказать, что такое УЗО, для чего оно нужно и как работает. Мне предоставилась возможность…
Блок: 10/13 | Кол-во символов: 170
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
Как устроен защитный автомат
В предыдущей статье мы разобрались с характеристиками автоматических выключателей, а сейчас полезем глубже. Я…
Блок: 11/13 | Кол-во символов: 150
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
Характеристики автоматических выключателей на примере TEXENERGO
Несколько лет назад я опубликовал на блоге статьи по выбору автоматических выключателей и почему выбивает…
Блок: 12/13 | Кол-во символов: 179
Источник: https://SamElectric.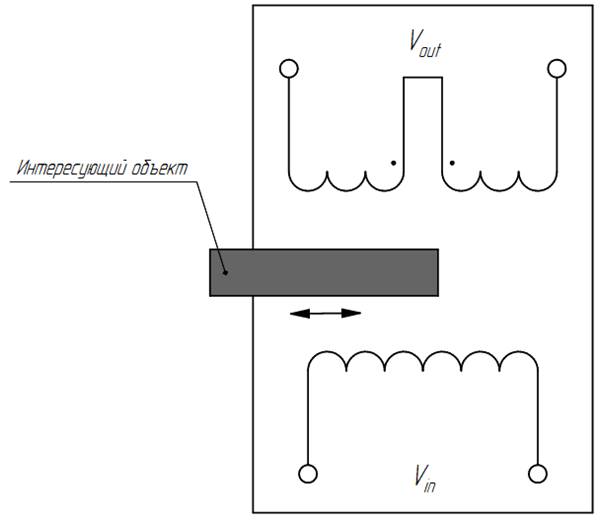 ru/promyshlennoe-2/vkluchenie-datchikov.html
ru/promyshlennoe-2/vkluchenie-datchikov.html
Итоги Конкурса статей 2019 г
Конец года – время подводить итоги. 10 декабря я запустил голосование, в котором приняли участие 5 авторов…
Блок: 13/13 | Кол-во символов: 138
Источник: https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html
Количество использованных доноров: 6
Информация по каждому донору:
- https://SamElectric.ru/promyshlennoe-2/vkluchenie-datchikov.html: использовано 10 блоков из 13, кол-во символов 7160 (23%)
- https://StrojDvor.ru/elektrosnabzhenie/princip-raboty-i-podklyuchenie-induktivnyx-datchikov/: использовано 4 блоков из 6, кол-во символов 5927 (19%)
- https://www.RusElectronic.com/beskontaktnye-datchiki/: использовано 5 блоков из 7, кол-во символов 5276 (17%)
- https://www.e-automation.ru/taxonomy/term/43: использовано 3 блоков из 4, кол-во символов 1629 (5%)
- https://www.delta-forum.ru/viewtopic. php?f=6&t=1431&start=10: использовано 4 блоков из 5, кол-во символов 2517 (8%)
- https://powercoup.by/stati-po-elektromontazhu/magnitnyiy-puskatel: использовано 3 блоков из 4, кол-во символов 8531 (27%)
 php?f=6&t=1431&start=10: использовано 4 блоков из 5, кол-во символов 2517 (8%)
php?f=6&t=1431&start=10: использовано 4 блоков из 5, кол-во символов 2517 (8%)виды, принцип работы, схема подключения, как проверить
Работа на промышленных предприятиях требует внедрения автоматической системы управления. С этой целью применяется разное оборудование, способное обеспечить бесперебойное функционирование производственных машин. Для контроля металлических объектов не редко используют бесконтактные индуктивные датчики, обладающие как положительными, так и отрицательными качествами. Но главное, что они отличаются небольшими размерами и прекрасно выполняют возложенные функции, поэтому пользуются популярностью и у производителей бытовой и даже медицинской техники.
Общее описание и назначение
Индуктивным датчиком принято называть устройство, способное преобразовывать механические перемещений контролируемых объектов в электрический сигнал. Представляет собой одну или несколько катушек индуктивности, объединенных с магнитопроводом и подвижным якорем, который регистрирует измерения линейного или углового размера и, перемещаясь, влияет на показатель индуктивности, изменяя ее в одну или другую сторону. Благодаря такой особенности, бесконтактные датчики активно используются в качестве элементов контроля положения металлических объектов.
Представляет собой одну или несколько катушек индуктивности, объединенных с магнитопроводом и подвижным якорем, который регистрирует измерения линейного или углового размера и, перемещаясь, влияет на показатель индуктивности, изменяя ее в одну или другую сторону. Благодаря такой особенности, бесконтактные датчики активно используются в качестве элементов контроля положения металлических объектов.
Виды
По схеме построения индукционные датчики принято разделять только на 2 отдельных вида: одинарные и дифференцированные.
Одинарные
Устройства только с одним магнитопроводом. Такая схема обычно применяется при разработке бесконтактных выключателей.
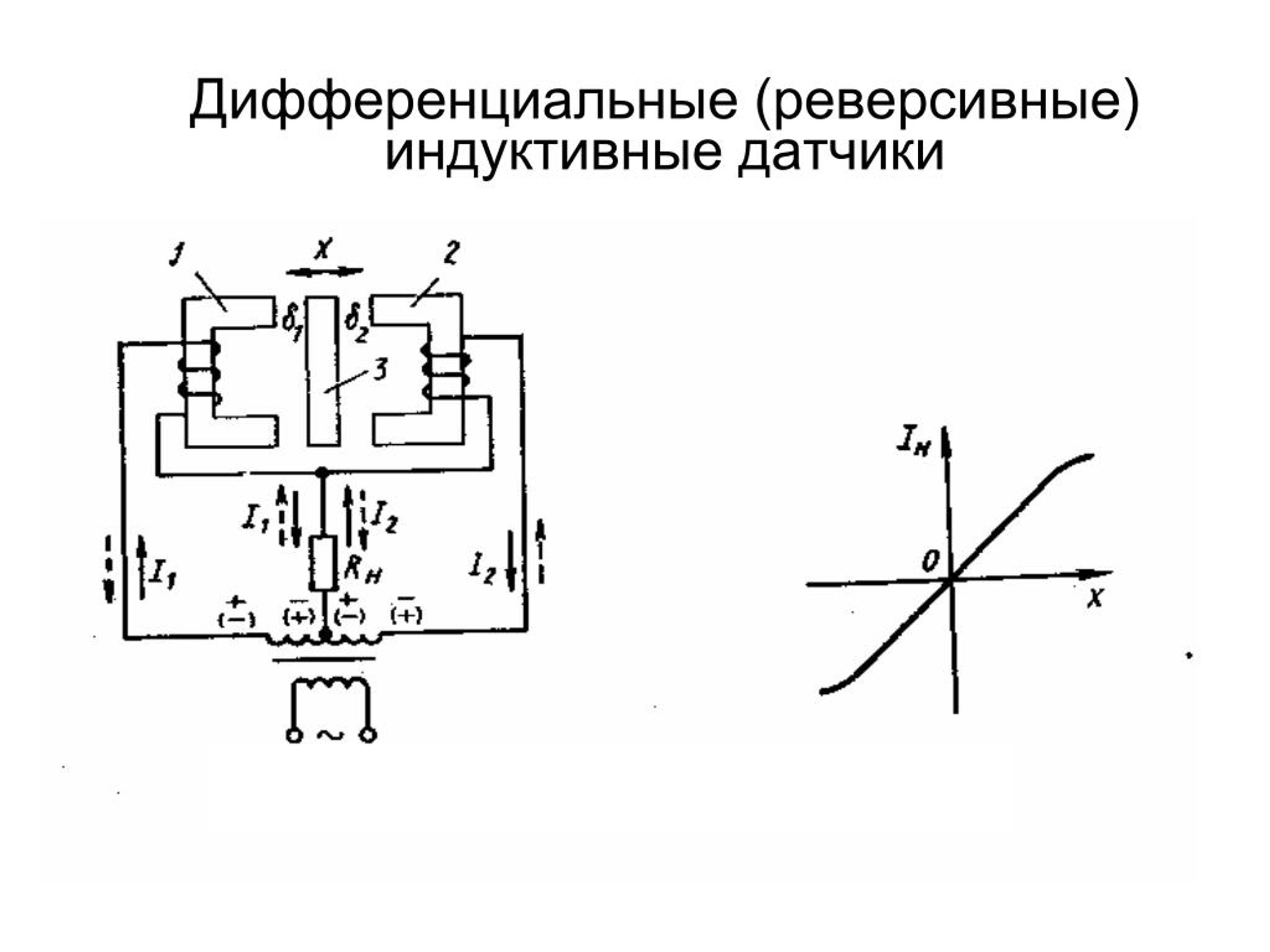
Дифференциальные
Отличаются наличием сразу 2-ух магнитопроводов, каждый из которых специально сделанных в виде «ш». Это позволяет взаимокомпенсировать воздействие, оказываемое на сердечник, повышая таким образом точность производимых измерений. По сути, схема представляет из себя систему из 2-ух датчиков, соединенных общим якорем.
Устройство и схема
Индукционный датчик, как и любое электронное устройство, состоит из связанных друг с другом узлов, обеспечивающих бесперебойность его работы. В качестве основных элементов аппарата можно выделить следующее.
Генератор
Ключевой задачей генератора является создание магнитного поля, на основе которого, в частности, строится принцип действия индукционного датчика, а также образуются зоны активности с объектом.
Триггер Шмидта
Триггер Шмидта представляет собой отдельный элемент, основным назначением которого считается обеспечение гистерезиса в процессе переключения устройства.
Усилитель
Усилительное устройство используется в качестве элемента, способного повышать значение амплитуды импульса, что позволяет сигналу быстрее достигать необходимого параметра.
Специальный индикатор
Диодный индикатор, свидетельствующий о фактическом состоянии контроллера. Кроме того, светодиод используется для обеспечения достаточного контроля функционирования индукционного датчика, а также, чтобы обеспечить достаточную оперативность в процессе настройки.
Компаунд
Компаунд предназначается для защиты устройства, поскольку может предотвратить попадание жидкости, в частности воды, внутрь корпуса индукционного датчика, а также снижает риск загрязнения оборудования, так как пыль может спровоцировать его поломку.
Принцип работы
Принцип действия основывается на изменениях амплитудного значения колебаний генераторного узла при попадании в активную зону устройства объекта определенных размеров. В процессе подачи электропитания на концевик оборудования в районе его чувствительной части формируется изменяющееся магнитное поле. Оно наводит в находящемся в рабочей зоне датчика материале вихревые токи, ведущие к изменению амплитуды электромагнитных колебаний.
В результате начнет вырабатываться выходной сигнал, который в процессе может изменяться в зависимости от фактического расстояния между устройством и объектом контроля.
Параметры
Чтобы контролировать функциональность индукционного датчика, а также определять уровень его сигналов, надо разбираться в параметрах устройства.
Напряжение питания
Представляет собой диапазон допустимого напряжения, в рамках которого устройство работает корректно.
Минимальный ток переключения
Это минимально возможное значение электрического тока, которое обязательно должно поступать к датчику для обеспечения его работы.
Рабочие расстояния
Это максимально допустимое расстояние от устройства до железного квадрата миллиметровой толщины. При этом данное значение уменьшается, если используется другой материал.
Частота переключения
Это максимально возможное количество переключений, которые можно сделать в течение одной секунды.
Способ подключения
Вариант подключения любого бесконтактного датчика зависит от примененной в процессе его производства схемы построения.
Трехпроводные
Трехпроводные имеют 3 проводника, 2 из которых предназначаются для обеспечения устройства питанием, а третий применяется для подключения к нагрузке. Она, в зависимости от использованной при разработке структуры, может подсоединяться к аноду либо катоду источника напряжения электрического тока.
Четырехпроводные
Четырехпроводные индукционные датчики отличаются наличием четырех проводников: 2 провода идут на питание, а другие 2 — на загрузку.
Двухпроводные
Двухпроводные устройства подключаются прямо в нагрузочную цепь. Это самый элементарный вариант, но и он обладает отдельными особенностями. Данный способ для нагрузки требует номинальное сопротивление, если же его значение окажется больше или меньше, тогда индукционный датчик не сможет корректно работать.
Внимание! При подключении устройства к источнику постоянного тока следует помнить о полярности выводов.
Пятипроводные
Пятипроводной отличается от четырехпроводного только наличием пятого проводника, который позволяет выбирать режим работы устройства.
Цветовая маркировка
Все электротехническое оборудование, в том числе проводники, обязательно имеет цветовую маркировку. Ее принято наносить для удобства последующих монтажных работ и дальнейшего обслуживания. Это правило должно соблюдаться и в случае с индукционными датчиками. Их выходные проводники маркируются следующими цветами:
Ее принято наносить для удобства последующих монтажных работ и дальнейшего обслуживания. Это правило должно соблюдаться и в случае с индукционными датчиками. Их выходные проводники маркируются следующими цветами:
- минус обычно указывается синим;
- плюс — красным;
- выход — черным;
- белый — дополнительный выход или же вход управления, что определяется типом используемого датчика.
Погрешности
Погрешности в процессе преобразования диагностических значений оказывают влияние на способности индукционных датчиков выдавать достоверную информацию. К основным из них можно отнести следующие.
Электромагнитная
Данную погрешность принято учитывать только в качестве случайной величины. Как правило, она возникает в ходе индуцирования ЭДС в индукционной катушке в результате внешнего воздействия сторонними магнитными полями. Это происходит в процессе производства из-за силовых электроустройств. Они образуют магнитные поля, что впоследствии и формирует электромагнитную погрешность.
От температуры
Эта погрешность тоже выступает в качестве случайного значения, поскольку работа большого числа элементов индукционного датчика напрямую зависит от температурных показателей, поэтому это ключевая величина, которая даже учитывается в процессе проектировки подобного оборудования.
Магнитной упругости
Обычно такая погрешность может проявляться как следствие нестабильности деформации магнитопровода устройства в процессе сборки самого датчика, а также при деформационных изменениях во время работы. Кроме того, оказываемое нестабильным электронапряжением воздействие на магнитопровод оборудования вызывает снижение качества передаваемого сигнала на выходе.
Деформация элементов
Данная погрешность, как правило, проявляется в результате воздействия измеряющей силы на значение деформации частей индукционного датчика, а также под влиянием усилий, оказываемых на нестабильные деформирующие процессы. Кроме того, не меньшее влияние на нее могут оказывать люфты и зазоры, образовавшиеся в подвижных элементах конструкции устройства.
Кабеля
Такая погрешность обычно проявляется от непостоянного значения сопротивления, в случае деформации самого провода и под влиянием температуры. Также подобным образом может сказаться наводка внешними полями ЭДС в кабеле.
Старение
Данная погрешность может проявляться при износе движущихся элементов самого устройства, а также в случае постоянно изменяющихся магнитных свойств используемого магнитопровода. Ее принято считать, строго говоря, случайным значением. В процессе определения данной погрешности учитывают кинематику конструкции индукционного датчика, а во время проектирования подобного оборудования максимальный эксплуатационный срок рекомендуется определять только при работе в обычном режиме, чтобы при этом износ не успел превысить установленного значения.
Технологии
Погрешности технологии проявляются в случае отклонений от технического процесса производства, при явном разбросе технических параметров катушек и остальных элементов во время сборки, влиянии допущенных зазоров при соединении устройства. Для ее измерения принято использовать механическое измерительное оборудование.
Для ее измерения принято использовать механическое измерительное оборудование.
Сферы использования
Возможная область применения индукционных датчиков настолько велика, что позволяет использовать их не только в быту и автомобилестроении, но и в промышленности с робототехникой, а также медицине.
Медицинские аппараты
Индуктивные датчики широко используются при производстве медицинского оборудования, поскольку магнитные свойства устройства позволяют регистрировать легочную вентиляцию, параметры вибрации, а также снимать баллистокардиограммы.
Бытовая техника
В бытовом плане датчики могут выступать в качестве приспособления контроля водоснабжения, уровня освещения и положения двери (закрыта или открыта), поэтому используются при производстве, к примеру, стиральных машин и другой бытовой техники. Кроме того, устройства применяются в процессе создания элементов «умного дома».
Автомобильная промышленность
Используется индукционный датчик и в автостроении, выступая в роли контроллера, определяющего положение коленчатого вала. При приближении металлического объекта, в данном случае, зуба шестерни, к устройству, генерируемое встроенным постоянным магнитом магнитное поле увеличивается, что приводит к наведению в катушке переменного напряжения.
При приближении металлического объекта, в данном случае, зуба шестерни, к устройству, генерируемое встроенным постоянным магнитом магнитное поле увеличивается, что приводит к наведению в катушке переменного напряжения.
Внимание! Некоторые производители для повышения эффективности стараются изменить конструкцию индукционного датчика, к примеру, используя внешние магниты для его активации.
Робототехническое оборудование
В случае с робототехникой, индуктивным датчикам нашли применение в производстве беспилотных аппаратов и промышленных роботов для повышения их чувствительности к препятствиям и способности распознавать объекты, а также устройствах, для которых важна самобалансировка.
Промышленная техника регулирования и измерения
Широко используются в работе систем транспортеров, упаковочных аппаратов и сборочных линий, а еще в составе всех видов станкового оборудования и запорной арматуры. Также индуктивные датчики помогают контролировать мелкие и крупные элементы промышленной техники (зубцы шестеренок, стальные флажки, штампы), объекты производства (металлические изделия, листы металла, крышки) и т. п. Кроме того, при их подключении к импульсным счетчикам можно в результате получить элементарное, но крайне эффективное считывающее устройство.
п. Кроме того, при их подключении к импульсным счетчикам можно в результате получить элементарное, но крайне эффективное считывающее устройство.
Индукционные датчики следующего поколения
Благодаря новым разработкам в этой области, были созданы усовершенствованные модели индукционных датчиков следующего поколения. Принцип работы остался прежним, однако подверглась тщательной переработке конструкция устройства. В результате датчики теперь оснащаются тонкими платами, распечатанными на 3D-принтерах, и современной цифровой электроникой. Кроме того, их производят на гибких подложках, что избавляет от необходимости использования традиционных кабелей и разъемов. Так что пользоваться устройствами можно даже в тяжелых погодных условиях.
К преимуществам новых разработок можно отнести следующее:
- снижение стоимости и веса, более компактные размеры;
- возможность выбора практически любых форм-факторов;
- повышение точности реагирования на металлические объекты;
- возможность проведения замеров, связанных со сложной геометрией, в двух или трех измерениях;
- упрощение конструкции;
- возможность устанавливать несколько индукционных датчиков близко друг к другу из-за высокой электромагнитной совместимости.
Все это позволило увеличить эффективность и доступность устройства, а также расширить сферу его применения.
Схемы включения индуктивных датчиков — Энциклопедия по машиностроению XXL
Индуктивные датчики давлений на лопасти включаются в одно из плеч мостовой схемы. Три остальных плеча представляют собой два сопротивления и компенсационный датчик, выполненный конструктивно так же, как рабочий. Индуктивные датчики обладают большой чувствительностью. Их комплексное сопротивление, номинальная величина которого равна 500 ом, изменяется при работе на 10% и более при / = 10 кгц. Поэтому схема включения индуктивных датчиков в измерительный мост может быть простейшей. При измерении давлений на лопастях гидротурбин от п датчиков канала через втулку рабочего колеса до коммутационного блока было проложено (п + 2) провода, а от коммутационного блока через токосъемник к измерительному мосту — всего два провода. Наличие в цепи датчика двух контактных переходов (в коммутационном блоке и в токосъемнике), а также возможные температурные изменения сопротивлений соединительных проводов здесь не сказывались вследствие их малого уровня в сравнении с уровнем полезных сигналов, получаемых от индуктивных датчиков давления.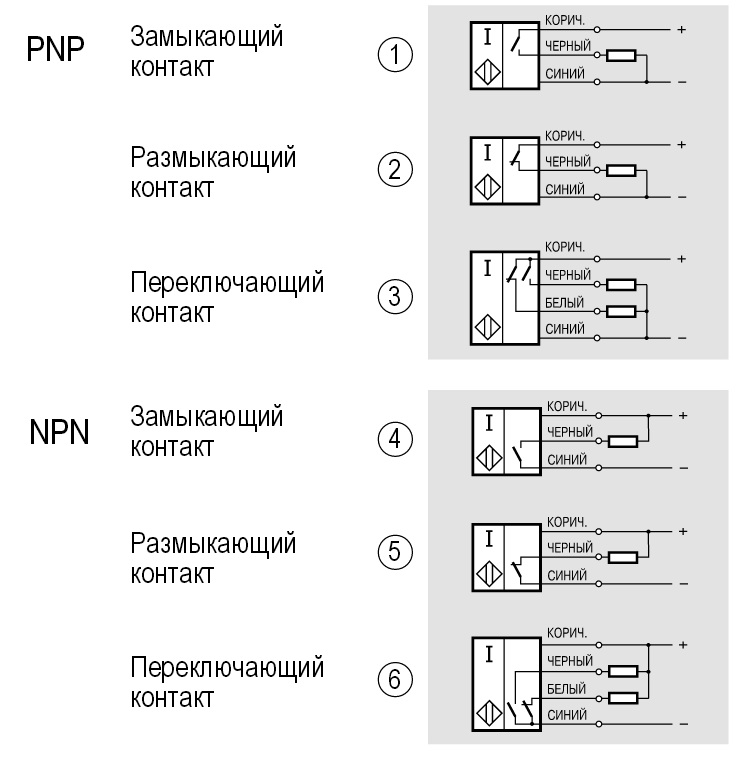 [c.120]
[c.120]
| Рис. 82. Принципиальные схемы включения индуктивных датчиков а — простейшего, б — типа ИКВ-22 |
На фиг. 160 дана принципиальная электрическая схема включения индуктивного датчика при использовании его в качестве путевого выключателя. Последовательно с катушкой датчика ДС включена катушка этажного реле Р. В случае применения этажного реле на постоянном токе включение его катушки производится через сухие выпрямители ВС (фиг. 160, а). При наличии реле переменного тока с высоким коэффициентом возврата надобность в сухих выпрямителях отпадает (фиг. 160,6). [c.291]
Фиг..jpg) 161. Принципиальная схема включения индуктивных датчиков точной остановки. 161. Принципиальная схема включения индуктивных датчиков точной остановки.
|
| Рис. 139. Схема включения индуктивного датчика в цепь регулировочной обмотки |
| Рис. 9. Электрические схемы включения индуктивных датчиков а—последовательная б — мостовая в — резонансная |
Рнс. 6.18. Принципиальная схема включения индуктивного датчика
[c. 182]
182]
Перемещение стола станка на величину шага резьбы приводит ж такому же синусоидальному изменению тока в диагонали мостовой схемы, как и при использовании датчика с зубчатой линейкой. Дисбаланс мостовой схемы, в которую включен индуктивный датчик с катушками 3 и 4, устраняют поворотом винта 1. [c.39]
В отсчетном устройстве прибора (фиг. 166) установлена крупная шкала 1 диаметром 150 мм, позволяющая следить за показаниями прибора на некотором расстоянии от него. На шкале нанесено 120 делений с ценой 1 мк. По этой шкале перемещается центральная стрелка 2. На оси стрелки закреплена щетка 4. По окружности ободка шкалы установлены в требуемых местах контакты 3. При движении стрелки щетка 4 последовательно замыкает контакты 3 и подает команды на прекращение черновой подачи и включение чистовой, на выключение подачи и быстрый отвод круга. На оси стрелки закреплена также щетка 5, скользящая по реохорду 6, включенному в мостовую схему с индуктивным датчиком. [c.31]
[c.31]
Весьма перспективными устройствами для динамических измерений с емкостными и индуктивными датчиками являются приборы, в которых используются операционные усилители. Рассмотрим две схемы включения датчиков в операционный усилитель. [c.447]
Электромагнитные преобразователи (датчики) основаны на принципе преобразования перемещения или поворота в электрический сигнал с использованием изменения индуктивности или магнитного потока. Преобразователи, в которых перемещение преобразуется в изменение индуктивности обмотки, получили название индуктивных датчиков. Преобразователи, в которых перемещение преобразуется в изменение магнитного потока, как правило, во вторичных обмотках, получили название трансформаторных (взаимно-индукционных) датчиков. Поскольку схемы работы индуктивных и трансформаторных датчиков одинаковы, то рассмотрим две наиболее распространенные схемы включения (рис. 10.10, а, б) мостовую и дифференциальную соответственно. Электромагнитные преобразователи имеют ряд преимуществ по сравнению с устройствами других типов для съема показаний приборов, а именно надежность и относительную простоту конструкции высокую крутизну характеристики и достаточно большую мощность снимаемого сигнала малую зону нечувствительности (с помощью индуктивных датчиков можно замерять углы
[c.592]
Поскольку схемы работы индуктивных и трансформаторных датчиков одинаковы, то рассмотрим две наиболее распространенные схемы включения (рис. 10.10, а, б) мостовую и дифференциальную соответственно. Электромагнитные преобразователи имеют ряд преимуществ по сравнению с устройствами других типов для съема показаний приборов, а именно надежность и относительную простоту конструкции высокую крутизну характеристики и достаточно большую мощность снимаемого сигнала малую зону нечувствительности (с помощью индуктивных датчиков можно замерять углы
[c.592]
Схема включения простейшего индуктивного датчика приведена на рис. 82, а. Дроссель индуктивного датчика ДИ включен в цепь переменного тока последовательно с исполнительным токовым реле Р. Когда магнитная цепь датчика разомкнута, т. е. когда напротив П-об-разного сердечника нет магнитного шунта, индуктивное сопротивление датчика мало и исполнительное реле Р включено. Когда магнитный шунт, укрепленный на кабине, подходит к датчику, закрепленному в шахте, магнитная цепь датчика замыкается, его индуктивное сопротивление резко возрастает и исполнительное реле отключается вследствие уменьшения тока в цепи датчика.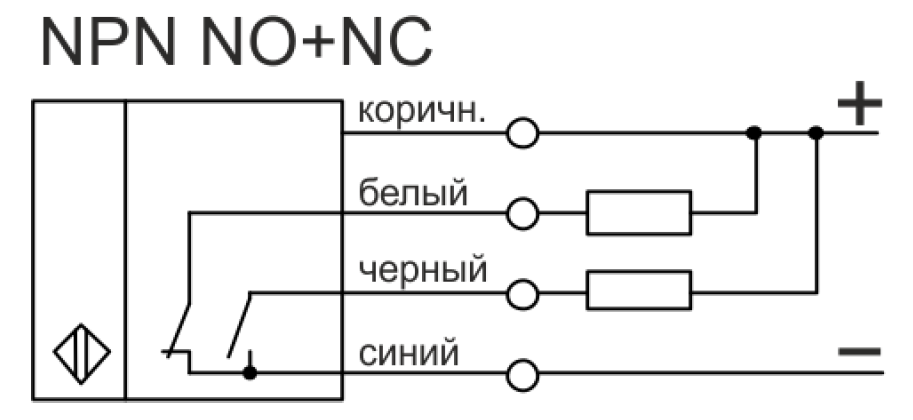 Работа индуктивного датчика не меняется, если дроссель датчика укреплен на кабине, а магнитный шунт — в шахте.
[c.121]
Работа индуктивного датчика не меняется, если дроссель датчика укреплен на кабине, а магнитный шунт — в шахте.
[c.121]
Момент трения при испытании измеряют при помощи индуктивных датчиков, которые включены по мостовой схеме с повышающими трансформаторами. Напряжение снимается со вторичных обмоток трансформаторов, выпрямляется германиевыми выпрямителями, собранными по мостовой схеме, и сравнивается на показывающем приборе УМ. С потенциометра, включенного последовательно с прибором УМ, снимается сигнал на самописец ЭПП-09. Разбаланс измерительного моста получается за счет изменения зазора между ярмом и сердечником индуктивного датчика. Перемещение сердечника происходит вследствие деформации упругого элемента. [c.191]
Разность высот изделия а у его концов измеряется при помощи двух независимых индуктивных датчиков 1 я 2, включенных по дифференциальной схеме через трансформатор 3. Измерительный прибор 4 регистрирует наличие конусности изделия а. [c.784]
[c.784]
На рис. 8.58 представлена принципиальная электрическая схема САУ размером статической настройки Л о при включении датчиков измерительного устройства в две автономные системы с целью компенсации погрешностей программоносителя (копира) относительно оси центров станка. Дифференциальные индуктивные датчики ДК и Д2 БВ-844) включены в мостовую схему, при этом датчик Д1 измеряет положение вершины резца. [c.615]
Электрическая схема (фиг. 38) пульта представляет собой мост, два плеча которого составляют катушки К и Кг индуктивного датчика. Катушки уравновешиваются сопротивлениями / з, и ю-В диагональ моста включен селеновый выпрямитель В, соединенный с гальванометром Г, шкала которого градуируется в микронах. [c.62]
Трехконтактная скоба с индуктивным датчиком (конструкция НИАТ) представлена на фиг. 32, а. На измерительный шток 1 скобы опирается шток 2 индуктивного датчика 3, закрепленного в верхней части корпуса устройства. Шток датчика перемещается вместе с якорем Я, размещенным между двумя индуктивными катушками 1 и Кг (фиг. 32, б). Индуктивные катушки совместно с омическими сопротивлениями образуют мост, в диагональ которого включен выпрямитель В. Показанная на фиг. 32,6 мостовая электрическая схема позволяет сбалансировать мост при двух различных положениях якоря Я датчика. Для этого включают сопротивление между плечами и (Rз моста. Благодаря этому достигается возможность отсчета по двум шкалам показывающего прибора 15, подключенного к выпрямителю Одна из шкал служит для отсчета при предварительной обработке, а вторая — при окончательной обработке детали. Переход со шкалы на шкалу производится включением дополнительного сопротивления и
[c.57]
Шток датчика перемещается вместе с якорем Я, размещенным между двумя индуктивными катушками 1 и Кг (фиг. 32, б). Индуктивные катушки совместно с омическими сопротивлениями образуют мост, в диагональ которого включен выпрямитель В. Показанная на фиг. 32,6 мостовая электрическая схема позволяет сбалансировать мост при двух различных положениях якоря Я датчика. Для этого включают сопротивление между плечами и (Rз моста. Благодаря этому достигается возможность отсчета по двум шкалам показывающего прибора 15, подключенного к выпрямителю Одна из шкал служит для отсчета при предварительной обработке, а вторая — при окончательной обработке детали. Переход со шкалы на шкалу производится включением дополнительного сопротивления и
[c.57]
Индуктивный датчик 7 представляет собой трансформатор с разомкнутой цепью, первичная обмотка которого питается током промышленной частоты с напряжением 5—7 в от стабилизатора. Напряжение, индуктируемое во вторичной обмотке, при постоянстве намагничивающих ампер-витков является функцией зазора 5 между полюсами датчика и деталью.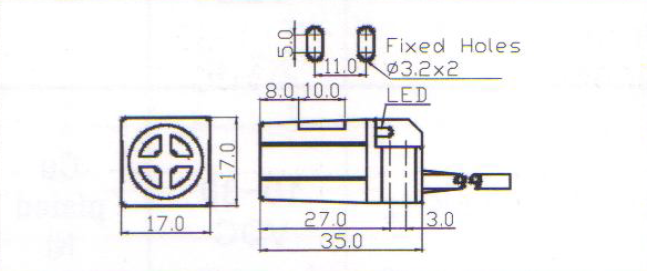 Это напряжение подается к блоку измерительной схемы, на выходе которой включен показывающий прибор 2 магнитоэлектрической системы. По шкале прибора следят за изменением размера детали.
[c.122]
Это напряжение подается к блоку измерительной схемы, на выходе которой включен показывающий прибор 2 магнитоэлектрической системы. По шкале прибора следят за изменением размера детали.
[c.122]
При включении индуктивных датчиков в систему контрольных автоматов чаще всего применяют схему самобалансирующегося моста (фиг. 66). [c.552]
На рис. 117 представлена блок-схема устройства ЭСУ-12. Звуковой генератор 2 питает током несущей частоты индуктивный датчик 1 и через выпрямитель 3 — датчик эталонных сигналов 4. Сигнал от датчика поступает на катодный повторитель 5 и через выпрямитель 6 — на прибор 7, который после соответствующего тарирования показывает величину стабилизируемой нагрузки или деформации. Катодный повторитель 5 служит для усиления сигнала датчика по мощности, выходное» напряжение катодного повторителя через, выпрямители 8 16 сподводится соответственно к схеме сравнения с эталонным напряжением. 9 (и далее через диодный ограничитель к мостовому усилителю постоянного напряжения 10) -, к включенным параллельно ограничителю максимума нагрузки 17 и через диодный ограничитель 18 — к ограничителю минимума нагрузки 19.
[c.177]
9 (и далее через диодный ограничитель к мостовому усилителю постоянного напряжения 10) -, к включенным параллельно ограничителю максимума нагрузки 17 и через диодный ограничитель 18 — к ограничителю минимума нагрузки 19.
[c.177]
Основным элементом счетно-импульсной системы числового программного управления, определяющим точность ее работы, является датчик обратной связи. Датчики могут быть контактными, например, электроконтактиые, регистрирующие обороты и доли оборотов ходового винта, и бесконтактными. К последним относятся индуктивные датчики различных типов. Некоторое распространение в СССР получили индуктивные датчики с проходным якорем. Принцип действия такого датчика показан на рис. 97, а. Якорь 1 датчика закрепляется на исполнительном органе станка и вместе с ним перемещается по отношению к непод вижным сердечникам катушек Zi и включенных в измерительную мостовую схему (рис. 97, б). Недостатком датчика является значительное магнитное сопротивление, а следовательно, малая чувствительность, так как основной магнитный поток замыкается только по граням сердечников и якоря. Этот недостаток устраняют увеличением количества рабочих граней, т. е. созданием полюсных наконечников на сердечнике и якоре зубчатой формы
[c.171]
Этот недостаток устраняют увеличением количества рабочих граней, т. е. созданием полюсных наконечников на сердечнике и якоре зубчатой формы
[c.171]
Принципиальная схема прибора показана на рис. 2. Для питания индуктивного датчика высокочастотным напряжением в приборе имеется кварцевый генератор, выполненный на лампе 6Ж9П (лампа Л ). Повышенная стабильность генерируемы.х колебаний достигается применением в приборе вакуумного кварцевого резонатора с частотой 13 000 кгц. Кварцевый резонатор включен между управляющей сеткой и катодом лампы, обратная связь осуществляется за счет емкости анод — сетка лампы. [c.451]
Датчик представляет собой маятниковый отвес и две индуктивные катушки, включенные в мостовую схему. При наклоне датчика на некоторый угол изменяется положение корпуса вместе с катушками относительно маятника. Изменение относительного положения катушек и маятника приводит к разбалансу моста. Величину разбаланса определяют по стрелочному отсчетному y ipofi-ству, которое отградуировано в угловых величинах. [c.256]
[c.256]
Программа работы записана на ленте 1, пропускаемой через дешифратор 15. Перемещение программоносителя в дешифраторе синхронизировано с вращением двигателя 8 (т. е. с Ерашением стола 9). Сигналы, формируемые в дешифраторе, направляются в промежуточное запоминающее устройство 2. Последнее, интерполируя получаемые команды, преобразует их в сигналы, амплитуда которых пропорциональна требуемому перемещению салазок, и направляет эти сигналы в сравнивающее устройство 3. Сюда же поступают сигналы обратной связи от потенциометра 6. Сигнал, получаемый на выходе сравнивающего устройства, проходит через усилитель 4 к электродвигателю 5. Вал этого двигателя механически связан (на схеме механическая связь условно показана штриховой линией) с индуктивным датчиком 14а, включенным в плечо моста 14. Остальные плечи моста образуют индуктивности 14в, 14с и 14d. К зажимам моста подводится напряжение частотой 1 кгц. Когда мост окажется неуравновешенным, сигнал, появляющийся в его диагонали, через усилитель 13 направляется к электродвигателю 12,
[c. 149]
149]
При деблокировании реле РВН отключаются реле РЗ и РУВ, а контактор В остается включенным через свой 3. контакт до срабатывания реле точной остановки РТО. Для спуска кабины с последовательными остановками на всех этажах назначения или вызова в схеме имеется дополнительное фетоэлектрическое устройство в виде фотореле замедления ФРЗ, фоторезистор которого размещен на шагающем поводке копираипарата и получает питание от плюсовой шины через 3. контакт реле РУН. При подходе к этажу назначения или вызова фоторезистор реле замедления ФРЗ засвечивается этажным тиратроном, а при срабатывании реле ФРЗ разрывается цепь питания реле большой скорости РЗ, контактор большой скорости В) отключается, а малой скорости (М) включается, переключая обмотки двигателя на малую скорость. При деблокировании реле РЗ его Р. контакт в цепи питания катушки контактора М замыкается, но реле РТО удерживается в возбужденном состоянии 3. контактом индуктивного датчика оста- [c.184]
Аналогичное по принципу действия устройство может быть использовано для отсчета угловых перемещений (рис. 111.23). Индуктивный датчик состоит из вращающейся шестерни 2 с внутренним зацеплением и неподвижных шестерен 1. Шест ерни 1 сидят на бронзовой втулке 5 и разделены бронзовой втулкой 4. В кольцевых пазах шестерен 1 расположены обмотки 3. Шестерни 1 представляют собой сердечники электромагнитов. Между зубьями шестерен 1 я 2 имеется небольшой зазор. Магнитные потоки Ф замыкаются через зубья шестерен, Зубья одной шестерни 1 смещены относительно зубьев второй шестерни 1 на половину шага. Таким образом, в то время как воздушный зазор между зубьями одной из шестерен 1 и шестерней 2 минимальный, зазор между зубьями второй из шестерен 1 и шестерней 2 — максимальный. При вращении шестерни 2 воздушные зазоры изменяются и соответственно изменяется индуктивное сопротивление обеих катушек. Катушки включены по схеме, которая используется для включения индуктивного проходного датчика с винтом. Число делений зависит от числа зубьев шестерен.
[c.465]
111.23). Индуктивный датчик состоит из вращающейся шестерни 2 с внутренним зацеплением и неподвижных шестерен 1. Шест ерни 1 сидят на бронзовой втулке 5 и разделены бронзовой втулкой 4. В кольцевых пазах шестерен 1 расположены обмотки 3. Шестерни 1 представляют собой сердечники электромагнитов. Между зубьями шестерен 1 я 2 имеется небольшой зазор. Магнитные потоки Ф замыкаются через зубья шестерен, Зубья одной шестерни 1 смещены относительно зубьев второй шестерни 1 на половину шага. Таким образом, в то время как воздушный зазор между зубьями одной из шестерен 1 и шестерней 2 минимальный, зазор между зубьями второй из шестерен 1 и шестерней 2 — максимальный. При вращении шестерни 2 воздушные зазоры изменяются и соответственно изменяется индуктивное сопротивление обеих катушек. Катушки включены по схеме, которая используется для включения индуктивного проходного датчика с винтом. Число делений зависит от числа зубьев шестерен.
[c.465]
Индуктивные датчики основаны на преобразовании линейных перемещений в изменение индуктивности катушки. Преимуществами индуктивного метода измерений являются непрерывность измерения возможность регистрации непрерывно изменяющихся величин, что необходимо при контроле параметров зубчатых колес, перемещений узлов станков и др. возможность отсчета действительных отклонений измеряемой-величины по шкале прибора дистанционность измерений высокая чувствительность и простота конструкции датчиков. Недостатками метода являются срайнительная сложность электрических схем включения датчиков и влияние отклонений параметров схемы на результаты измерения.
[c.140]
Преимуществами индуктивного метода измерений являются непрерывность измерения возможность регистрации непрерывно изменяющихся величин, что необходимо при контроле параметров зубчатых колес, перемещений узлов станков и др. возможность отсчета действительных отклонений измеряемой-величины по шкале прибора дистанционность измерений высокая чувствительность и простота конструкции датчиков. Недостатками метода являются срайнительная сложность электрических схем включения датчиков и влияние отклонений параметров схемы на результаты измерения.
[c.140]
Принципиальная схема рейтерных компенсационных динамометров полностью аналогична схеме, приведенной па рис. 88. Датчик перемещений вместе с сервомотором образует замкнутую систему автоматического регулирования, в которой регулируемым параметром является угловое положение рычага, а роль регулирующего органа выполняет ходовой винт с грузом (рейтером). В качестве датчиков перемещения чаще всего применяются индуктивные (трансформаторные) или контактные устройства. В системах с индуктивным датчиком для уменьшения колебаний рычага в системе управления предусматривается гибкая обратная связь, состоящая из индукционного тахогенератора, установленного на одном валу с сервомотором. В отличие от индуктивных датчиков, обеспечивающих непрерывное изменение скорости сервомотора от нуля до максимума, контактные датчики при включении сообщают сервомотору сразу некоторую конечную скорость. Недостатком весового элемента с контактным датчиком перемещения является склонность к автоколебаниям всей системы автоматического уравновешивания при увели-292
[c.292]
В системах с индуктивным датчиком для уменьшения колебаний рычага в системе управления предусматривается гибкая обратная связь, состоящая из индукционного тахогенератора, установленного на одном валу с сервомотором. В отличие от индуктивных датчиков, обеспечивающих непрерывное изменение скорости сервомотора от нуля до максимума, контактные датчики при включении сообщают сервомотору сразу некоторую конечную скорость. Недостатком весового элемента с контактным датчиком перемещения является склонность к автоколебаниям всей системы автоматического уравновешивания при увели-292
[c.292]
Индуктивные датчики типа ИКВ-21 предназначены для выполнения тех же функций, что и дат шки ИКВ-20. Недостатком схемы включения датчиков, в которых использовались реле постоянного тока, являлось применение селеновых выпрямителей. Датчики ИКВ-21 (см. фиг. 159) предусмотрены для работы непосредственно с реле переменного тока типа МКУ-48. Конструктивное их отличие от датчиков ИКВ-20 заключается в том, что внутрь корпуса встроены конденсаторы, которые ранее устанавливались на магнитной станции.
 В остальном конструкция датчика не изменилась, и он работает с магнитными шунтами типа СС-20 (табл. 49). Дополнительно разработан магнитный шунт длиной 2600 м.м. Датчики ИКВ-21 предусмотрены для питания напряжением переменного тока 220 в. Омическое сопротивление катушки 25 + 2,5 ом, импеданц без магнитного шунта = 950 + 50 ом, импеданц при нахождении магнитного шунта в дросселе — 1650 + 80 о.м.
[c.423]
В остальном конструкция датчика не изменилась, и он работает с магнитными шунтами типа СС-20 (табл. 49). Дополнительно разработан магнитный шунт длиной 2600 м.м. Датчики ИКВ-21 предусмотрены для питания напряжением переменного тока 220 в. Омическое сопротивление катушки 25 + 2,5 ом, импеданц без магнитного шунта = 950 + 50 ом, импеданц при нахождении магнитного шунта в дросселе — 1650 + 80 о.м.
[c.423]Познакомимся теперь с принципиальной электрической схемой отсчетно-командного устройства (фиг. 40, а). Обмотки катушек Их и Яг индуктивного датчика и сопротивления / 1 и / 2 образуют электрический мост, в измерительную диагональ которого включен реохорд 4 (реостат, свернутый в кольцо). Реохорд имеет обмотку из проволоки с высоким омическим сопротивлением. При перемещении якоря между катушками из-за изменения разности их сопротивлений в диагонали моста появляется неуравновешенное напряжение, или, как говорят, напряжение дисбаланса, которое поступает в электронный усилитель 1 и затем к небольшому серводвигателю 10.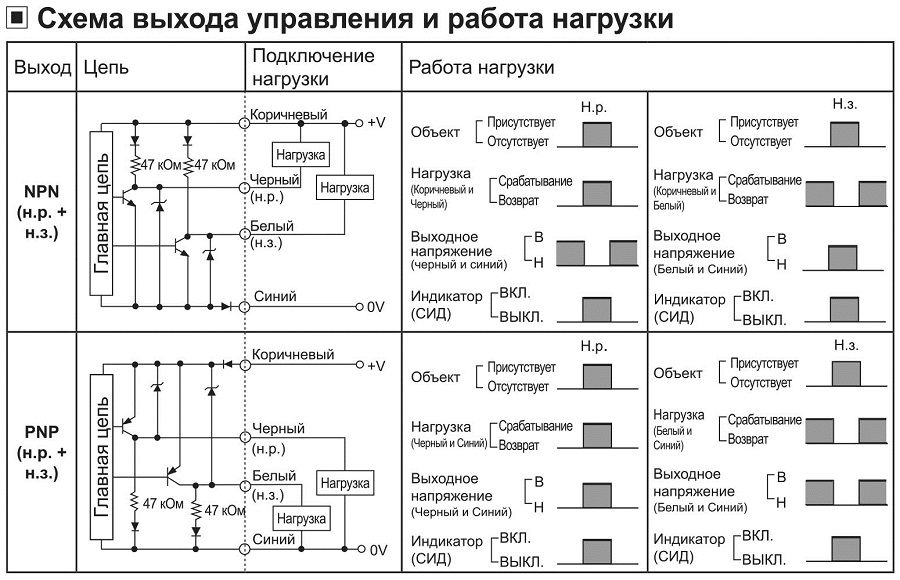 Вал серводвигателя поворачивается на угол, пропорциональный напряжению дисбаланса. Шкив его связан капроновой нитью с диском 3, несущим скользящий контакт 2 реохорда. Благодаря этому поворот вала серводвигателя вызывает поворот контакта реохорда, а следовательно, изменение величины активного сопротивления обмотки реохорда. Поворот контакта происходит до тех пор, пока мостовая схема не окажется уравновешенной.
[c.74]
Вал серводвигателя поворачивается на угол, пропорциональный напряжению дисбаланса. Шкив его связан капроновой нитью с диском 3, несущим скользящий контакт 2 реохорда. Благодаря этому поворот вала серводвигателя вызывает поворот контакта реохорда, а следовательно, изменение величины активного сопротивления обмотки реохорда. Поворот контакта происходит до тех пор, пока мостовая схема не окажется уравновешенной.
[c.74]
Генератор и усилитель прибора ИЭ-20 выполнены в одном блоке по схеме с электронной связью на одной лампе. В отличие от приборов типа ИЭ-1 и ИЭ-11 в данном приборе катушка компенсационного контура и катушка датчика включаются в параллельную резонансную цепь. Это объясняется тем, что рабочая частота прибора равна 6 Мгц. На такой частоте из-за собственной емкости кабеля между датчиком и прибором нельзя ирименить схему с последовательным включением индуктивности и емкости. Однако, несмотря на такое включение катушек контура и датчика, прибор отстраивается от влияния изменений зазора между датчиком и контролируемой поверхностью и может быть нечувствительным к зазорам до 250 мк.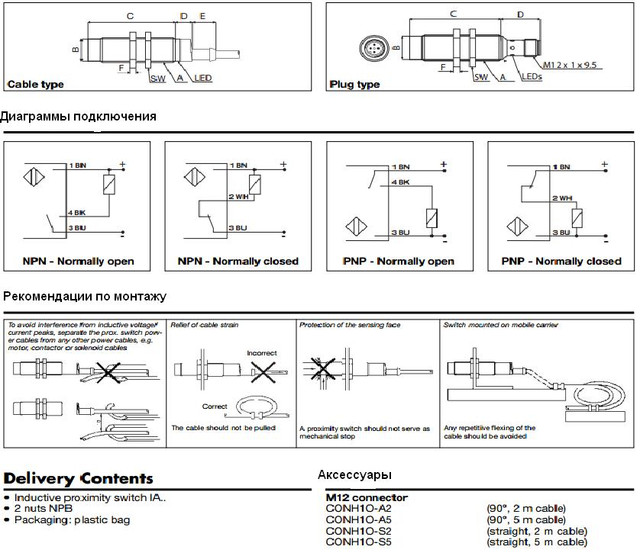 [c.374]
[c.374]
Регулятор мощности. Регулятор мощности — золотникового типа, с жесткой обратной связью непрямого действия с гидравлическим усилителем, который приводит в действие индуктивный датчик, включенный в систему возбуждения тягового генератора. Воздействуя на обмотку возбуждения тягового генератора, регулятор, при помощи электрической схемы создает внешнюю характеристику генератора, имеющую форму гиперболы. Управление частотой вращения коленчатого вала дизеля при объединенном регуляторе — дистанционное, электрогидравлнческое, с поста управления, при помощи рукоятки контроллера машиниста, имеющего пятнадцать фиксированных положений позиций. При переключении контроллера машиниста с одной позиции на другую подводится ток к электромагнитам, которые воздействуют на золотниковое устройство, регулирующее подачу масла к гидравлическому сервомотору управления. Под действием давления масла поршень 19 сервомотора управления перемещается вверх или вниз, сжимая или разжимая всережимную пружину регулятора, и тем,самым увеличивает или уменьшает частоту вращения коленчатого вала дизеля. [c.242]
[c.242]
заказать по лучшей цене от «Профиком»
Индуктивный датчик для больших расстояний, металлический, 3/4-х проводная схема с размером корпуса M18x1
Индуктивный датчик движения — это бесконтактный датчик который используется для контроля положения металлических объектов. Принцип действия датчиков этого типа базируется на изменении параметров магнитного поля создаваемого катушкой внутри датчика при приближении металлических предметов( это могут быть зубья шестеренки, кулачки, металлические детали и т.д.). Такие датчики являются одними из популярных устройств, применяемых для обнаружения присутствия объектов в промышленной автоматике и системах управления автоматизированным производством. По типу выходного сигнала, индуктивный выключатель является дискретным датчиком. Выходной сигнал формируется только в момент сближения с объектом. Выполнение данных датчиков может быть NO(с нормально открытым контактом),NC(с нормально закрытым контактом), так и NO+NC(4-х проводная схема подключения), насадка датчика может быть как выступающая так и встроенная, а выходной транзистор может быть как в NPN так и в PNP исполнении.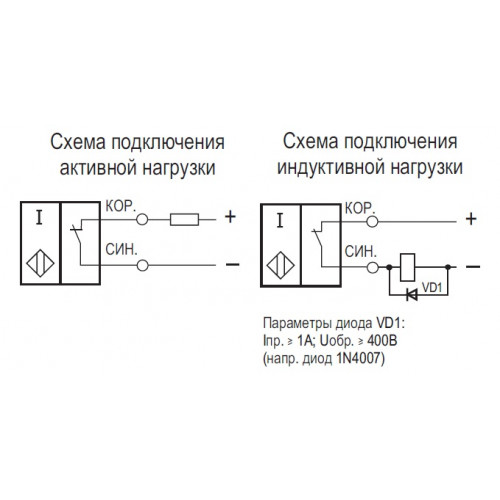 Так как индуктивный датчик срабатывает только при приближении металлических предметов, то он не чувствителен к помехам и работает даже в тяжелых производственных условиях.
Так как индуктивный датчик срабатывает только при приближении металлических предметов, то он не чувствителен к помехам и работает даже в тяжелых производственных условиях.
По сравнению с другими устройствами индуктивные датчики имеют ряд отличительных преимуществ:
- высокая прочность и простота конструкции;
- простота монтажа и эксплуатации;
- совместимость с промышленными сетями питания;
- высокая чувствительность;
- быстрота срабатывания;
- долгий срок службы;
- низкая цена по сравнению с аналогичными приборами.
Главным ограничением в применение индуктивных датчиков приближения является совместимость только с металлическими и магниточувствительными материалами. Это значительно сужает область применения приборов. При необходимости работы с неметаллическими материалами рекомендуется использовать в качестве концевых выключателей – датчики емкостного типа. Также точность срабатывания индуктивного выключателя может быть снижена при нестабильном питании.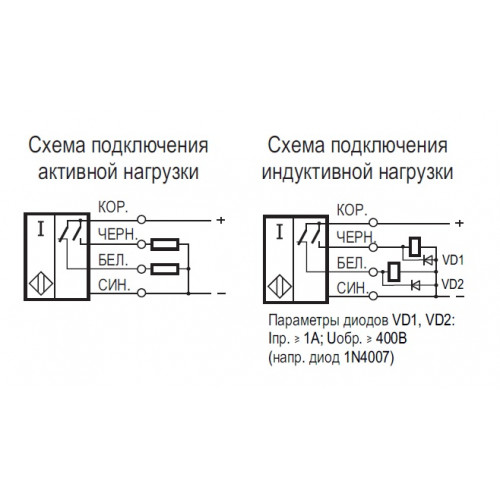 Не рекомендуется применять датчики вблизи промышленного оборудования, генерирующего мощные магнитные поля или электрические помехи. Соответственно при работе с индуктивными приборами необходимо тщательно подходить к организации рабочего пространства и рабочей сети питания.
Не рекомендуется применять датчики вблизи промышленного оборудования, генерирующего мощные магнитные поля или электрические помехи. Соответственно при работе с индуктивными приборами необходимо тщательно подходить к организации рабочего пространства и рабочей сети питания.
Сфера применения:
- бесконтактный контроль положения объектов в пространстве;
- контроль положения элементов и частей машин и механизмов;
- контроль перемещения объектов;
- контроль скорости движения объекта;
- сортировка металлических объектов;
- контроль целостности объектов;
- контроль заполнения;
- контроль угла поворота и многие другие.
Индуктивные датчики
Структура
Индуктивные бесконтактные выключатели Компании «ТЕКО» состоят из следующих основных узлов.
Принцип действия
Принцип действия бесконтактного конечного выключателя (ВК) основан на изменении амплитуды колебаний генератора при внесении в активную зону датчика металлического, магнитного, ферромагнитного или аморфного материала определенных размеров.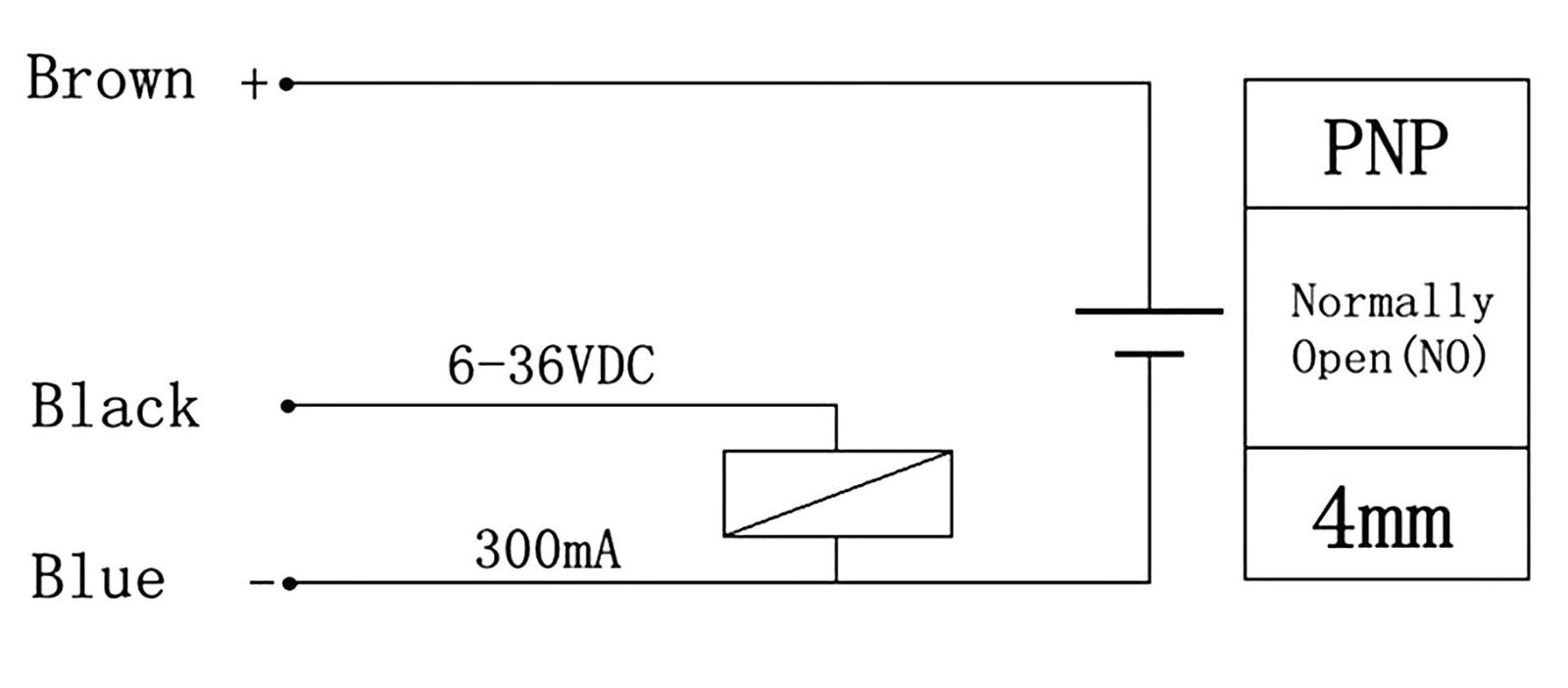 При подаче питания на конечный выключатель в области его чувствительной поверхности образуется изменяющееся магнитное поле, наводящее во внесенном в зону материале вихревые токи, которые приводят к изменению амплитуды колебаний генератора. В результате вырабатывается аналоговый выходной сигнал, величина которого изменяется от расстояния между датчиком и контролируемым предметом. Триггер преобразует аналоговый сигнал в логический, устанавливая уровень переключения и величину гистерезиса.
При подаче питания на конечный выключатель в области его чувствительной поверхности образуется изменяющееся магнитное поле, наводящее во внесенном в зону материале вихревые токи, которые приводят к изменению амплитуды колебаний генератора. В результате вырабатывается аналоговый выходной сигнал, величина которого изменяется от расстояния между датчиком и контролируемым предметом. Триггер преобразует аналоговый сигнал в логический, устанавливая уровень переключения и величину гистерезиса.
Чувствительная поверхность
Чувствительная поверхность — это площадка, ограниченная наружным диаметром ферритового сердечника, на котором собрана электромагнитная система датчика. Диаметр этой поверхности приблизительно равен диаметру датчика.
Активная зона
Активная зона бесконтактного индуктивного выключателя — та область перед его чувствительной поверхностью, где более всего сконцентрировано магнитное поле чувствительного элемента датчика. Она, как правило, соизмерима с размерами чувствительного элемента.
Она, как правило, соизмерима с размерами чувствительного элемента.
Измерительная пластина
В качестве измерительной пластинки используется стальная квадратная пластинка (сталь 40) толщиной 1 мм со сторонами, равными диаметру активной поверхности. Однако, если произведение 3хSном больше диаметра активной поверхности, то пластина выбирается со сторонами 3хSном.
Расстояние переключения S
Расстояние переключения — расстояние, при котором объект, приближающийся к активной поверхности датчика, вызывает изменение выходного логического сигнала.
Номинальное расстояние переключения Sном
Номинальное расстояние переключения — теоретическая величина, не учитывающая разброс производственных параметров датчика, изменения температуры и напряжения питания.
Эффективный зазор Sэфф
Эффективный зазор Sэфф определяется при номинальном рабочем напряжении и температуре окружающей среды 25°C ± 0,5. В нем учтены производственные разбросы датчика.
0,9Sном ≤ Sэфф ≤ 1,1Sном
Полезный зазор Sпол
Полезный зазор Sпол — это расстояние переключения, учитывающее все производственные разбросы датчика, изменения температуры и напряжения.
0,81Sном ≤ Sпол ≤ 1,21Sном
Рабочий зазор Sраб
Рабочий зазор Sраб — это любое расстояние, обеспечивающее надежную работу бесконтактного выключателя в допустимых пределах температуры и напряжения.
0 ≤ Sраб ≤ 0,8Sном
Поправочный коэффициент рабочего зазора
Поправочный коэффициент дает возможность определить рабочий зазор, который зависит от металла, из которого изготовлен объект воздействия.
| Материал | Коэффициент |
| сталь 40
чугун никель нерж.сталь алюминий латунь медь | 1,0
0,93…1,05 0,65…0,75 0,60…1,00 0,30…0,45 0,35…0,50 0,25…0,45 |
Гистерезис выключателя H
Под гистерезисом понимается разность между точкой включения при приближении измерительной пластинки и точкой выключения при ее отдалении от бесконтактного выключателя. Величина гистерезиса указывается в % от номинального расстояния переключения.
Воспроизводимость точки переключения R
Воспроизводимость точки переключения- точность повторения расстояния переключения при двух последовательных включениях в течение 8 часов при температуре окружающей среды 25°C ± 5, напряжении, отклоняющемся от номинального на 5%, относительной влажности 50…70%.
R ≤ 0,05Sэфф
Частота переключений f
Частота переключений — это максимально возможное число переключений датчика в секунду. В качестве объекта воздействия используются стандартные измерительные пластинки с расстоянием между ними 2d.
Температурный дрейф рабочего зазора
Температурный дрейф рабочего зазора — это отклонение рабочего зазора в диапазоне рабочих температур, выраженное в процентах.
Δ S / S ≤ 10%
Задержка включения
Задержка включения — это время, необходимое бесконтактному выключателю для того, чтобы полностью прийти в рабочее состояние с момента подачи питания.
Крутизна фронтов T
Крутизна фронтов выходного логического сигнала — скорость нарастания/спада напряжения выходного логического сигнала, измеренная в вольт/мкс.
Номинальная нагрузка Rном
Номинальная нагрузка — наименьшее допустимое омическое сопротивление присоединенной нагрузки.
Выходное сопротивление Ro
Выходное сопротивление — внутреннее сопротивление источника выходного сигнала.
Ток холостого хода Iо (остаточный ток Iхх)
Это ток, потребляемый бесконтактным выключателем от источника питания при отключенной нагрузке.
Номинальный ток Іном
Это ток, под действием которого выключатель может находиться длительное время.
Импульсный ток Іmах
Это наибольший допустимый импульсный ток, который может выдержать выключатель.
Защита выключателя
Это электрическая защита устройства от неправильного подключения питания, короткого замыкания выхода, бросков напряжения питания.
Рабочее напряжение Uраб
Это допустимый диапазон напряжения, при котором гарантируется надежная работа выключателя (включая пульсацию).
Расчетное рабочее напряжение Uрас
Это рабочее напряжение, используемое для испытаний без учета допустимых отклонений. Для выключателей постоянного тока Uрас=24В. Для выключателей переменного тока и выключателей переменного/постоянного тока Uрас=110В.
Падение напряжения на датчике
Это напряжение, измеренное на включенном датчике под нагрузкой при номинальном токе Iном.
Пульсация рабочего напряжения
Это отношение амплитуды переменного напряжения к номинальному рабочему напряжению (допустимый максимум 15%).
Установка датчиков в металл и относительно друг друга
Бесконтактные индуктивные выключатели, встраиваемые заподлицо в металл
Бесконтактные выключатели могут быть встроены в металл до торцевой чувствительной поверхности без изменения рабочих параметров. Между двумя соседними выключателями должно быть расстояние не менее диаметра датчика.
Бесконтактные индуктивные выключатели, не встраиваемые заподлицо в металл
Бесконтактный выключатель является не встраиваемым в металл, если для поддержания его установленных параметров требуется свободная зона (Р), в которой должны отсутствовать материалы, влияющие на данные параметры. Между двумя соседними выключателями должно быть расстояние не менее 2 х с1 активной поверхности.
Встречное расположение бесконтактных выключателей
Бесконтактные выключатели могут быть расположены встречно друг к другу, при этом расстояние между активными поверхностями должно быть более 3Sном.
Виды контактов
Нормально разомкнутый — «НР» (замыкающий)
Бесконтактный выключатель обеспечивает функцию замыкающего контакта при появлении в активной зоне измерительной пластинки (в исходном состоянии нагрузка отключена).
Нормально замкнутый — «НЗ» (размыкающий)
Бесконтактный выключатель обеспечивает функцию размыкающего контакта при появлении в активной зоне измерительной пластинки (в исходном состоянии нагрузка подключена).
Функция «исключающее или» (переключающий)
Бесконтактный выключатель одновременно обеспечивает функцию замыкающего и размыкающего контактов.
Постоянное напряжение
3-х, 4-х проводные схемы подключения
| Кабельное соединение | Разъемное соединение | |||
| PNP | Замыкающий контакт | 1 | ||
| Размыкающий контакт | 2 | |||
| Переключающий контакт | 3 | |||
| NPN
| Замыкающий контакт | 4
| ||
| Размыкающий контакт | 5
| |||
| Переключающий контакт | 6
| |||
2-х проводные схемы подключения
| Кабельное соединение | Разъемное соединение | |||
| Замыкающий контакт | 7
| |||
| Размыкающий контакт | 8
| |||
| Замыкающий контакт | 9
| |||
| Размыкающий контакт | 10
| |||
Переменное напряжение
Без заземления
| Кабельное соединение | Разъемное соединение | |||
| Замыкающий контакт | 11 | |||
| Размыкающий контакт | 12
| |||
С заземлением
| Замыкающий контакт | 13
| |||
| Размыкающий контакт | 14
| |||
Без заземления
|
| 15
| |||
| Размыкающий контакт | 16
| |||
С заземлением
| Замыкающий контакт | 17
| |||
| Размыкающий контакт | 18
| |||
Постоянное/переменное напряжение
Без заземления
| Кабельное соединение | Разъемное соединение | |||
| Замыкающий контакт | 19 | |||
| Размыкающий контакт | 20
| |||
С заземлением
| Замыкающий контакт | 21
| |||
| Размыкающий контакт | 22
| |||
Без заземления
|
| 23
| |||
| Размыкающий контакт | 24
| |||
С заземлением
| Замыкающий контакт | 25
| |||
| Размыкающий контакт | 26
| |||
Схема подключения с открытым коллектором
| NPN | Замыкающий контакт | 27
| ||
| Размыкающий контакт | 28
| |||
Функция «И» (последовательная)
Схема собрана из выключателей постоянного напряжения исполнения PNP с функцией «нормально разомкнутого контакта». На каждом датчике происходит падение напряжения около 1 вольта. Поэтому ограничено количество элементов «n» в схеме. Кроме того, необходимо учитывать токи холостого хода отдельных датчиков.
Схема собрана из выключателей постоянного напряжения исполнения NPN с функцией «нормально разомкнутого контакта».
Функция «ИЛИ» (параллельная)
Схема собрана из выключателей постоянного напряжения исполнения PNP с функцией «нормально разомкнутого контакта».
Схема собрана из выключателей постоянного напряжения исполнения NPN с функцией «нормально разомкнутого контакта».
Параллельное соединение бесконтактных выключателей переменного напряжения не рекомендуется, так как в связи с нарастанием колебаний генератора могут появляться ошибочные импульсы.
Последовательная схема может быть собрана из двух выключателей переменного напряжения. В каждом датчике происходит падение напряжения около 5 вольт.
Схема собирается из выключателя переменного напряжения и механического выключателя. Схема позволяет выключить нагрузку при включенном состоянии бесконтактного переключателя.
Эта схема обеспечивает возможность включения нагрузки при невключенном датчике.
Полезные ссылки
Что такое индуктивные датчики приближения, Часть 2
В первой части этой статьи был представлен индуктивный датчик приближения. Во второй и последней части рассматриваются некоторые особенности этого датчика.
В: Существуют ли разные архитектуры и реализации?
A: Да, есть три основных типа:
1) в датчике находятся только магнитные элементы. Это отделяет электронику от чувствительных катушек и обеспечивает самый маленький и прочный датчик, Рисунок 1 .
Рис. 1. Узел с резьбой и винтом может иметь только передний датчик с отдельной электроникой. (Изображение: Keyence Corp.)2) в следующей группе входной генератор и усилитель считываемого сигнала находятся в датчике, а усиленный сигнал затем передается по кабелю в дополнительную электронику для дальнейшей обработки и форматирования.
3) Теперь можно включить всю сигнальную цепь в сам узел датчика; некоторые версии даже оцифровывают условный аналоговый сигнал, Рисунок 2 .
Рис. 2: В качестве альтернативы, узел датчика может также содержать всю электронику. (Изображение: Keyence Corp.)Решение о том, какой стиль использовать, зависит от деталей установки, специфики приложения, стоимости по сравнению с производительностью, простоты использования и многих других факторов. Также существуют проблемы, связанные с работой с существующими устаревшими установками. Все три типа до сих пор широко используются.
В: Является ли режим измерения направленным?
A: Нет, основной датчик является всенаправленным, что желательно в некоторых случаях, но не в других.В случаях, когда необходима направленность, решение состоит в магнитном экранировании датчика, Рисунок 3 .
Рис. 3: Магнитное экранирование (слева) можно использовать, чтобы сделать диаграмму чувствительности датчика более сфокусированной, чем ее неэкранированную диаграмму (справа). (Изображение: Портал электротехники)В: Какие параметры необходимо оценить при выборе индуктивного датчика?
A: Помимо размера, чувствительность должна соответствовать приложению. Обычно указывается как максимальное расстояние, которое вызовет изменение выходного сигнала от датчика к квадратному куску железа толщиной 1 мм (тип Fe 37) с размерами сторон, равными диаметру чувствительной поверхности.Также существуют связанные проблемы гистерезиса и повторяемости, Рисунок 4 , а также температурные коэффициенты срабатывания. Другие соображения включают рабочую частоту, требования к мощности и току, а также тип и формат интерфейса.
Рис. 4. Такие факторы, как чувствительность и гистерезис, относятся к числу тех, которые используются для характеристики характеристик датчика. (Изображение: Fargo Controls Inc.)В: Сколько стоит датчик?
A: Цены на базовый датчик начинаются от 10 до 15 долларов и могут достигать сотен долларов в зависимости от размера, точности, степени прочности, количества встроенной электроники и других факторов.
В: Сложна ли схема использования индуктивного датчика?
A: Да и нет. Как и во многих схемах датчиков, базовая конструкция проста. Однако достижение точной, стабильной и стабильной работы может быть проблемой.
Q: Как это сделать?
A: До того, как стали доступны ИС с присущей им способностью позволять использовать схемы, позволяющие легко реализовать сложные топологии, это делалось с помощью дискретных транзисторов и, да, даже электронных ламп.ИС предлагают не только простоту использования, базовую функциональность и повышенную производительность, но и другие функции и возможности, которые приносят пользу пользователю. Среди производителей таких микросхем Microchip Technologies, Renesas и Texas Instruments.
Индуктивный датчик — важный компонент в инженерном меню датчиков, поскольку он прост в использовании, прочен, эффективен, точен и прост в установке. Как и его собрат LVDT, он доступен во многих размерах, чувствительности и электрических вариантах, и его стоит рассматривать в бесчисленных приложениях.
Соответствующее мировое содержание EE
Электроника LVDT, Часть 1: Возбуждение и демодуляция
Электроника LVDT, Часть 2: Схема интерфейса
Индуктивно-цифровой преобразователь представлен как первый в отрасли преобразователь положения и движения
Индуктивный датчик приближения с питанием от батареи, спортивный диапазон 70 футов
Индуктивное положение датчик предназначен для приложений с абсолютным положением в промышленных двигателях
Индуктивные датчики приближения с аналоговым выходом от Automation Direct
Беспроводная индуктивная система 2 для беспроводного подключения датчика
Индуктивное определение положения без магнитов для коммутации автомобильных двигателей
Внешние ссылки
Keyence Corp., «Что такое индуктивный датчик приближения?
Keyence Corp., «Категоризация индуктивных датчиков приближения
Automation.com,« Как работают индуктивные датчики »
Fargo Controls,« Принципы работы индуктивных датчиков приближения »
Microchip Technologies,« Надежные, недорогие и устойчивые к шумам датчики движения. Индуктивные датчики »
Renesas Electronics Corporation,« Индуктивный датчик положения IPS2550 для коммутации высокоскоростных двигателей (автомобильная промышленность) »
Texas Instruments,« LDC1101, высокоскоростной преобразователь индуктивности в цифровой с высоким разрешением 1,8 В »
Определения:
НЕТ (нормально разомкнутый): Выход переключателя, разомкнутый запрещающий ток, когда исполнительный механизм отсутствует и закрывается, позволяя текущий поток при наличии привода.
NC (нормально замкнутый): Релейный выход, замкнутый, позволяющий протекание тока при отсутствии привода и запрещение открывания текущий поток при наличии привода.
НПН Выход: Транзисторный выход, который переключает общий или отрицательное напряжение на нагрузку. Нагрузка подключается между положительное питание и выход.Текущие потоки из нагрузка через выход на землю, когда выход переключателя на. Также известен как снижение тока или отрицательное переключение.
PNP Выход: Транзисторный выход, переключающий положительное напряжение. к нагрузке. Нагрузка подключается между выходом и общим. Ток течет от выхода устройства через нагрузку к заземление при включенном выходе переключателя.Также известен как текущий источник или положительное переключение.
Эксплуатация Distance (Sn): Максимальное расстояние от датчика до квадратный кусок железа (Fe 37), толщиной 1 мм со сторонами = до диаметр чувствительной поверхности, который вызовет изменение на выходе датчика. Расстояние уменьшится для других материалы и формы. Испытания проводятся при 20ºC с источник постоянного напряжения.Это расстояние действительно включает ± Допуск изготовления 10%.
Мощность Supply: Диапазон напряжения питания, в котором будет работать датчик. в.
Макс Ток переключения: Допустимая величина постоянного тока протекать через датчик, не вызывая повреждения датчика. Это максимальное значение.
мин. Ток переключения: Это минимальное значение тока, которое должен протекать через датчик, чтобы гарантировать работу.
Макс Пиковый ток: Максимальный пиковый ток указывает на максимум текущее значение, которое датчик может выдержать в течение ограниченного периода времени времени.
Остаточный Ток: Ток, протекающий через датчик при он находится в открытом состоянии.
Мощность Drain: Величина тока, необходимая для работы датчика.
Напряжение Падение: Падение напряжения на датчике при движении максимальная загрузка.
Короткий Защита цепи: Защита от повреждения датчика если нагрузка закорочена.
Эксплуатация Частота: Максимальное количество циклов включения / выключения, которое устройство способно за одну секунду.Согласно EN 50010, этот параметр измеряется динамическим методом, показанным на инжир. 1 с датчиком в положениях (a) и (b). S — операционная расстояние, м — диаметр датчика. Частота дается формулой на рис. 2.
Повторяемость (% Sn): Разница между любыми значениями рабочего расстояния измеряется за 8 часов при температуре от 15 до 15 до 30ºC и напряжения питания с отклонением <= 5%.
Гистерезис (% Sn): Расстояние между точкой «включения» приближение исполнительного механизма и точка «выключения» привод отступает. Это расстояние снижает количество ложных срабатываний. Его значение выражается в процентах от рабочего расстояния. или расстояние. См. Рис.3
Промывка Монтаж: Для установки рядом с моделями скрытого монтажа см. рис.4а. Модели без скрытого монтажа можно встраивать в металл согласно рис. 4б. бок о бок см. на рис. 4c. Sn = рабочее расстояние.
Защита
Степень: Степень защиты корпуса согласно IEC
(Международная электротехническая комиссия) составляет:
IP 65: пыленепроницаемость. Защита от водяных струй.
IP 67: пыленепроницаемость. Защита от воздействия погружения
Монтаж индуктивных датчиков | Baumer International
- Товары
- Обнаружение объекта Обнаружение объекта
Датчики, датчики приближения и световые барьеры для обнаружения объектов и положения.
- Измерение расстояния Измерение расстояния
Датчики для определения расстояний и информации о расстоянии от микрометров до 60 м.
- Датчики Smart Vision Датчики Smart Vision
Простота в обращении и реализация эффективных задач контроля и управления, а также робототехники с визуальным контролем.
- Промышленные камеры / обработка изображений
- Удостоверение личности
- Датчики вращения / датчики угла
- Датчики наклона / ускорения
- Датчики процесса Датчики процесса
Автоматизация технологических процессов с помощью преобразователей, датчиков и измерительного оборудования для параметров давления, температуры, уровня заполнения, расхода и проводимости газообразных, жидких, пастообразных и сыпучих сред.
- Датчики силы и тензодатчики
- Регулировка формата Регулировка формата
Отображение и регулировка положения упоров и форматов в машинах и системах.
- Счетчики / дисплеи Счетчики / дисплеи
Сбор, отображение и управление данными процесса и измеренными значениями, такими как номера единиц, время, скорости вращения и положения.
- Аксессуары Аксессуары
Всегда подходящий аксессуар для вашего датчика и вашего приложения.
- Кабель / Связь
- Обнаружение объекта Обнаружение объекта
- Решения
- Компания
- Карьера
- Служба поддержки
Электрическое подключение
Датчики с цифровым переключением доступны с выходом PNP, NPN или Namur; измерительные датчики имеют выход по напряжению (0… 10 В) или токовый выход (например, 4… 20 мА или 0… 10 мА).
Последовательное переключение
3-проводный постоянный ток (показана схема PNP)
Падение напряжения на каждом проводящем датчике снижает доступное напряжение для управления нагрузкой.Таким образом, количество бесконтактных переключателей, которые могут быть подключены последовательно, ограничено и может быть рассчитано путем суммирования отдельных падений напряжения и требований к нагрузке.
Параллельное переключение
3-проводный DC
3-проводные датчики постоянного тока могут быть подключены параллельно, как показано. Однако параллельное соединение должно включать развязывающий диод.
Схемы подключения
Указанные диаграммы показывают незатухающий выход.Датчик находится в затухающем состоянии, когда объект находится в пределах его диапазона сканирования. На диаграммах Z обозначает типичное положение сопротивления нагрузки; Uz обозначает напряжение, приложенное к этому сопротивлению нагрузки. Если Uz = high (≈ + Vs), то течет ток; если Uz = low (≈ 0 В), то ток через сопротивление нагрузки не протекает. Сопротивление нагрузки между выходом и + Vs называется сопротивлением подтягивания, сопротивление нагрузки между выходом и 0 В — сопротивлением подтягивания.
Выход PNP или NPN
Датчики с выходом PNP или NPN имеют трехпроводную схему (+ Vs, выход и 0 В) и работают с постоянным током (DC).Сопротивление нагрузки датчиков PNP находится между выходом и 0 В (сопротивление при понижении напряжения), в то время как сопротивление нагрузки датчиков NPN находится между + Vs и выводом (сопротивление при повышении напряжения). В результате выход PNP подключается к источнику положительного напряжения во время переключения (положительный переключающий выход), тогда как выход NPN подключается к источнику отрицательного напряжения во время переключения (отрицательный переключающий выход).
Нормально разомкнутые контакты и / или нормально замкнутые контакты определяют функцию переключения.Нормально разомкнутые контакты называются нормально разомкнутыми (NO), нормально замкнутые контакты — нормально замкнутыми (NC). Во время демпфирования объектом датчики с нормально разомкнутой функцией устанавливают контактные соединения (Uz = высокий), а датчики с нормально закрытой функцией разъединяют соединения (Uz = низкий).
Пояснения к схемам подключения
Указанные диаграммы показывают незатухающий выход. Датчик находится в затухающем состоянии, когда объект находится в пределах его диапазона сканирования.На диаграммах Z обозначает типичное положение сопротивления нагрузки; Uz обозначает напряжение, приложенное к этому сопротивлению нагрузки. Если Uz = high (≈ + Vs), то течет ток; если Uz = low (≈ 0 В), то ток через сопротивление нагрузки не протекает. Сопротивление нагрузки между выходом и + Vs называется сопротивлением подтягивания, сопротивление нагрузки между выходом и 0 В — сопротивлением подтягивания.
Порядок монтажа и монтажа
Чтобы исключить непреднамеренное вмешательство в поле измерения и достичь максимальных расстояний срабатывания, необходимо соблюдать инструкции по монтажу и соблюдать указанные минимальные расстояния.Если минимальные расстояния подрезаны, можно ожидать уменьшения расстояний срабатывания. Рекомендуется провести тест сенсора непосредственно в приложении.
Поправочные коэффициенты для различных ситуаций установки, указанные в техническом паспорте датчика, имеют приоритет над общими указаниями, приведенными ниже.
Экранированный (скрытый) монтаж
Датчик может быть установлен заподлицо на металлической пластине. Выбор материала носителя может повлиять на расстояние срабатывания.
Неэкранированный (не скрытый) монтаж
Должно быть пространство, равное диаметру измерительной головки, без металлических помех.Следуя этому правилу, электрическое поле ослабляется в меньшей степени, что позволяет увеличить расстояние срабатывания.
Квазиэкранированный монтаж
При установке в ферромагнитный материал для этих датчиков требуется пространство (x) за активной областью, свободное от металла. Датчики могут быть установлены экранированными (заподлицо) при установке в цветные металлы (цветные металлы и т. Д.). Всегда читайте и соблюдайте инструкции по установке датчиков измерения расстояния.
Противоположный монтаж
Необходимо соблюдать минимальные расстояния, чтобы датчики, расположенные напротив друг друга, не влияли друг на друга.
Максимальный монтажный момент
Во избежание повреждения бесконтактных переключателей во время монтажа нельзя превышать значение крутящего момента по умолчанию. Уменьшите значения крутящего момента на 30% на лицевой стороне датчика.
Инструкции по монтажу корпусов без резьбы
Сильные, периодические нагрузки на корпус, подобные тем, которые возникают, например, во время фиксации винтами без головки этого следует избегать (IFRM 03, 04, 06). Неправильная установка может привести к необратимому повреждению бесконтактного переключателя.Датчики с диаметром корпуса 6,5 мм оптимально устанавливаются с помощью пластикового опорного кронштейна 10109474.
Размеры кабеляНастройка / обучение
Функции обучения Baumer
ДатчикиBaumer AlphaProx с линеаризованной характеристической кривой, датчики фактора 1 и высокочувствительные датчики имеют функцию обучения с несколькими режимами обучения. Это позволяет свободно настраивать диапазон измерения в заданных пределах. Если, например, требуется небольшой диапазон измерения с большой амплитудой сигнала, можно ограничить его до нескольких миллиметров.При необходимости направление работы аналогового выхода также можно инвертировать.
Кроме того, можно определить точки включения и выключения цифрового выхода. Они могут находиться как в пределах, так и за пределами индивидуально запрограммированного диапазона измерения.
Аналоговое обучение по 1 пункту
Настройка начального положения (например, 0 В), среднего положения (например, 5 В) или конечного положения (например, 10 В) диапазона измерения. В этом режиме обучения выходную характеристическую кривую можно смещать без изменения чувствительности или наклона характеристической кривой.Он используется для электронной компенсации допусков на установку и, таким образом, обеспечивает быструю и легкую настройку в серийном производстве.
Аналоговое обучение по двум точкам
2-точечное обучение используется в приложениях, где можно приблизиться к двум референтным точкам (начальной и конечной позиции). Регулируя диапазон измерения, можно полностью адаптировать чувствительность или наклон кривой выходной характеристики к области применения, а также компенсировать допуски при установке и изготовлении.Первая позиция обучения всегда соответствует начальному значению (например, 0 В), а вторая — конечному значению (например, 10 В). В зависимости от последовательности обучения выходная характеристика увеличивается или уменьшается по мере приближения к целевому объекту.
Window Teach Digital
Аналоговые датчики расстояния с дополнительным цифровым выходом предлагают цифровое окно обучения вместо двухточечного аналогового обучения. Это позволяет определять допустимый или недопустимый диапазон расстояний между целью и датчиком для цифрового выхода — независимо от аналогового выходного сигнала.В зависимости от последовательности обучения цифровой выход будет ВЫСОКИМ или НИЗКИМ, если измеряемый объект находится в пределах диапазона дистанций обучения. Эта функция обучения используется для определения отдельного сигнала переключения, например для контура конечного положения, независимо от аналогового сигнала.
Заводские настройки
Все датчики с функциями обучения имеют заводские настройки для сброса датчика до заводских настроек.
Ассортимент продукции
Индуктивные датчики приближения
Обнаружение объекта
- Бесконтактное обнаружение металлических предметов
- Контроль присутствия, движения и положения
- Очень маленькие датчики со всей встроенной обрабатывающей электроникой
- Малогабаритные датчики с большим расстоянием срабатывания
Индуктивные датчики расстояния
Измерение расстояния
- Обширный ассортимент
- Точность измерения вплоть до нанометрового диапазона
- Компактные датчики с полностью интегрированной электроникой обработки данных
- Откалиброваны для минимальных изменений партии продукции
с использованием TCA505
Представленная здесь схема представляет собой индуктивный датчик приближения , который используется для бесконтактного обнаружения металлических предметов.Схема может использоваться для обнаружения металлических предметов или как датчик позиционирования. TCA505 используется для разработки индуктивного бесконтактного переключателя, который может обнаруживать металлический объект в диапазоне 5-10 мм . Резонансный контур LC-генератора реализован с помощью феррита с открытым полуприводом и конденсатора, включенного параллельно (вывод LC). Если металлическая мишень перемещается ближе к открытой стороне феррита полуприцепа, энергия отбирается из резонансного контура, и амплитуда колебаний соответственно уменьшается.Это изменение амплитуды передается на пороговый переключатель с помощью демодулятора и запускает выходы. Я тестировал схему с напряжением 12 В постоянного тока, однако схема также может работать с более высоким напряжением питания, от до 42 В, с некоторыми изменениями значений компонентов, дополнительную информацию см. Обычно светодиод D2 горит, когда катушка обнаруживает металлический объект, светодиод D2 гаснет, а светодиод D1 включается, поэтому обычно Out-2 обеспечивает низкий выход, а Out-1 обеспечивает высокий выход при обнаружении металлического объекта.Q3 Выходной сигнал становится высоким, а Q1 — низким, оба выхода — открытый коллектор. Подстроечный потенциометр PR1 помогает регулировать расстояние чувствительности датчика. Выход каждого транзистора может напрямую управлять небольшим реле, так как каждый выход способен выдерживать ток 50 мА .
Примечание: катушка датчика может быть изготовлена из половинной части 14-мм сердечника из чугунного железа, индуктивность должна быть от 540 мкГн до 640 мкГн
Характеристики
- Питание 12 В постоянного тока
- Двойной выход (оба с открытым коллектором)
- Дальность обнаружения 5-10 мм
- Работа с двумя светодиодами
- D2-LED ON Обычно гаснет, когда датчик обнаруживает объект
- D1-LED OFF Обычно загорается, когда датчик обнаруживает объект
- PR1 — Регулировка чувствительности
- Оба выхода защищены от короткого замыкания
- Высокая помехоустойчивость
- Размеры печатной платы 30.77 мм x 15,54 мм
Схема
Список деталей
Подключения
Фото
TCA505BG Лист данных
Infineon-TCA505-DS-v01_01-ruВидео
% PDF-1.2 % 1 0 объект > эндобдж 3 0 obj > эндобдж 4 0 obj > эндобдж 5 0 obj > / Ж 6 0 Р >> эндобдж 8 0 объект > эндобдж 9 0 объект > эндобдж 10 0 obj > эндобдж 11 0 объект > эндобдж 12 0 объект > эндобдж 13 0 объект > эндобдж 14 0 объект > эндобдж 15 0 объект > эндобдж 16 0 объект > эндобдж 17 0 объект > эндобдж 18 0 объект > эндобдж 19 0 объект > эндобдж 20 0 объект > эндобдж 21 0 объект > эндобдж 22 0 объект > эндобдж 23 0 объект > эндобдж 24 0 объект > эндобдж 25 0 объект > эндобдж 26 0 объект > эндобдж 27 0 объект > эндобдж 28 0 объект > эндобдж 29 0 объект > эндобдж 30 0 объект > эндобдж 31 0 объект > эндобдж 32 0 объект > эндобдж 33 0 объект > эндобдж 34 0 объект > эндобдж 35 0 объект > эндобдж 36 0 объект > эндобдж 37 0 объект > эндобдж 38 0 объект > эндобдж 39 0 объект > эндобдж 40 0 объект > эндобдж 41 0 объект > эндобдж 42 0 объект > эндобдж 43 0 объект > эндобдж 44 0 объект > эндобдж 45 0 объект > эндобдж 46 0 объект > эндобдж 47 0 объект > эндобдж 48 0 объект > эндобдж 49 0 объект > эндобдж 50 0 объект > эндобдж 51 0 объект > эндобдж 52 0 объект > эндобдж 53 0 объект > эндобдж 54 0 объект > эндобдж 55 0 объект > эндобдж 56 0 объект > эндобдж 57 0 объект > эндобдж 58 0 объект > эндобдж 59 0 объект > эндобдж 60 0 объект > эндобдж 61 0 объект > эндобдж 62 0 объект > эндобдж 63 0 объект > эндобдж 64 0 объект > эндобдж 65 0 объект > эндобдж 66 0 объект > эндобдж 67 0 объект > эндобдж 68 0 объект > эндобдж 69 0 объект > эндобдж 70 0 объект > эндобдж 71 0 объект > эндобдж 72 0 объект > эндобдж 73 0 объект > эндобдж 74 0 объект > эндобдж 75 0 объект > эндобдж 76 0 объект > эндобдж 77 0 объект > эндобдж 78 0 объект > эндобдж 79 0 объект > эндобдж 80 0 объект > эндобдж 81 0 объект > эндобдж 82 0 объект > эндобдж 83 0 объект > эндобдж 84 0 объект > эндобдж 85 0 объект > эндобдж 86 0 объект > эндобдж 87 0 объект > эндобдж 88 0 объект > эндобдж 89 0 объект > эндобдж 90 0 объект > эндобдж 91 0 объект > эндобдж 92 0 объект > эндобдж 93 0 объект > эндобдж 94 0 объект > эндобдж 95 0 объект > эндобдж 96 0 объект > эндобдж 97 0 объект > эндобдж 98 0 объект > эндобдж 99 0 объект > эндобдж 100 0 объект > эндобдж 101 0 объект > эндобдж 102 0 объект > эндобдж 103 0 объект > эндобдж 104 0 объект > эндобдж 105 0 объект > эндобдж 106 0 объект > эндобдж 107 0 объект > эндобдж 108 0 объект > эндобдж 109 0 объект > эндобдж 110 0 объект > эндобдж 111 0 объект > эндобдж 112 0 объект > эндобдж 113 0 объект > эндобдж 114 0 объект > эндобдж 115 0 объект > эндобдж 116 0 объект > эндобдж 117 0 объект > эндобдж 118 0 объект > эндобдж 119 0 объект > эндобдж 120 0 объект > эндобдж 121 0 объект > эндобдж 122 0 объект > эндобдж 123 0 объект > эндобдж 124 0 объект > эндобдж 125 0 объект > эндобдж 126 0 объект > эндобдж 127 0 объект > эндобдж 128 0 объект > эндобдж 129 0 объект > эндобдж 130 0 объект > эндобдж 131 0 объект > эндобдж 132 0 объект > эндобдж 133 0 объект > эндобдж 134 0 объект > эндобдж 135 0 объект > эндобдж 136 0 объект > эндобдж 137 0 объект > эндобдж 138 0 объект > эндобдж 139 0 объект > эндобдж 140 0 объект > эндобдж 141 0 объект > эндобдж 142 0 объект > эндобдж 143 0 объект > эндобдж 144 0 объект > эндобдж 145 0 объект > эндобдж 146 0 объект > эндобдж 147 0 объект > эндобдж 148 0 объект > эндобдж 149 0 объект > эндобдж 150 0 объект > эндобдж 151 0 объект > эндобдж 152 0 объект > эндобдж 153 0 объект > эндобдж 154 0 объект > эндобдж 155 0 объект > эндобдж 156 0 объект > эндобдж 157 0 объект > эндобдж 158 0 объект > эндобдж 159 0 объект > эндобдж 160 0 объект > эндобдж 161 0 объект > эндобдж 162 0 объект > эндобдж 163 0 объект > эндобдж 164 0 объект > эндобдж 165 0 объект > эндобдж 166 0 объект > эндобдж 167 0 объект > эндобдж 168 0 объект > эндобдж 169 0 объект > эндобдж 170 0 объект > эндобдж 171 0 объект > эндобдж 172 0 объект > эндобдж 173 0 объект > эндобдж 174 0 объект > эндобдж 175 0 объект > эндобдж 176 0 объект > эндобдж 177 0 объект > эндобдж 178 0 объект > эндобдж 179 0 объект > эндобдж 180 0 объект > эндобдж 181 0 объект > эндобдж 182 0 объект > эндобдж 183 0 объект > эндобдж 184 0 объект > эндобдж 185 0 объект > эндобдж 186 0 объект > эндобдж 187 0 объект > эндобдж 188 0 объект > эндобдж 189 0 объект > эндобдж 190 0 объект > эндобдж 191 0 объект > эндобдж 192 0 объект > эндобдж 193 0 объект > эндобдж 194 0 объект > эндобдж 195 0 объект > эндобдж 196 0 объект > эндобдж 197 0 объект > эндобдж 198 0 объект > эндобдж 199 0 объект > эндобдж 200 0 объект > эндобдж 201 0 объект > эндобдж 202 0 объект > эндобдж 203 0 объект > эндобдж 204 0 объект > эндобдж 205 0 объект > эндобдж 206 0 объект > эндобдж 207 0 объект > эндобдж 208 0 объект > эндобдж 209 0 объект > эндобдж 210 0 объект > эндобдж 211 0 объект > эндобдж 212 0 объект > эндобдж 213 0 объект > эндобдж 214 0 объект > эндобдж 215 0 объект > эндобдж 216 0 объект > эндобдж 217 0 объект > ручей HWcgWT︊XE + CKe & ˾B «
Схема металлоискателя с индуктивным датчиком приближения
Gadgetronicx> Электроника> Принципиальные и электрические схемы> Схемы датчиков> Схема металлоискателя с индуктивным датчиком приближения
Команда Gadgetronicx 4 сентября 2020
Металлоискатели используются для обнаружения металлических предметов с различных поверхностей.Обычно в схемах этого типа используются индукторы и их индуктивные свойства для обнаружения металла. Однако в этой схеме мы используем специальный индуктивный датчик приближения для идентификации металлических предметов и зуммер для подачи сигнала тревоги при обнаружении.
Работа цепи металлоискателя:
Работа индуктивного датчика:
Для этой схемы мы будем использовать индуктивный датчик приближения ПЛ-05П. Этот индуктивный датчик способен обнаруживать металлы в пределах 5 мм.Имеет диапазон напряжения питания 10-30 В. Индуктивный датчик имеет внутренний генератор, который генерирует серию импульсов. Эти импульсы будут создавать магнитное поле вокруг своей поверхности, которое распространяется до диапазона обнаружения. Поэтому, когда металлический объект входит в зону обнаружения (то есть в пределах 5 мм), он нарушает магнитное поле. В зависимости от этого изменяется состояние выхода.
Для этого индуктивного датчика доступны различные варианты. Мы выбрали тот, у которого тип выхода PNP, как показано на диаграмме выше.Здесь, когда в диапазоне срабатывания датчика нет металлических предметов, базовое напряжение транзистора будет> 0,7 В. Это приводит к выходу 0 напряжения на черном проводе (выходе).
В то время как при попадании любого металлического предмета в диапазон срабатывания базовое напряжение упадет <0,7 Вольт. Это активирует транзистор, и на черном проводе будет напряжение 11,3 В (~ 12 В). Мы собираемся использовать это выходное напряжение от черного провода с компаратором и использовать его в качестве металлоискателя.
Зуммер:
Выход индуктивного датчика может управлять нагрузкой до 200 мА.Мы используем зуммер 5-12V в качестве звукового элемента в нашей схеме. Этот зуммер потребляет максимум около 30 мА, что вполне соответствует возможностям нашего индуктивного датчика.
Когда выходной сигнал датчика становится высоким, он включает зуммер и поднимает тревогу для обнаружения. Когда ничего не находится в пределах диапазона датчика, выходной сигнал датчика будет низким, и, следовательно, зуммер будет неактивен.
Потребление тока:
Датчик потребляет около 2,2 мА для своей работы, а зуммер потребляет около 30 мА тока.Таким образом, можно с уверенностью предположить, что эта схема потребляет около 35 мА тока в активном состоянии. Следовательно, он может питаться от аккумулятора 12 В. и будет мобильным.
Надеюсь, этот переключатель металлоискателя был вам полезен. Ознакомьтесь с другими схемами на нашем сайте. Если у вас есть какие-либо вопросы, отзывы и предложения, оставьте их в поле для комментариев ниже.
Индуктивные датчики| Типы выходов
Как это работает
Датчик с двухпроводной функцией — это активный компонент, для работы которого требуется энергия.Датчик получает эту электрическую энергию через два соединительных провода. В то же время датчик сигнализирует о своем состоянии переключения через те же соединительные провода.
Датчик с двухпроводной функцией часто приравнивается к механическому переключателю с точки зрения его работы. Тем не менее, этот тип датчика работает иначе, чем механический переключатель, который открывается или закрывается в зависимости от ситуации демпфирования датчика. Через разомкнутый механический переключатель ток не течет. Подключенная нагрузка не находится под напряжением.И наоборот, в идеальной ситуации напряжение не падает из-за замкнутого механического переключателя. Все напряжение питания приложено к нагрузке.
Напротив, датчик с двухпроводной функцией — как активный компонент — требует постоянного напряжения и тока. Даже в замкнутом состоянии на датчике падает незначительное напряжение, отсутствующее на подключенной нагрузке. В разомкнутом состоянии через датчик и подключенную нагрузку протекает ток. Следовательно, при работе датчика с двухпроводной функцией уникальные состояния «разомкнут» и «замкнут» никогда не существуют.
Датчики с двухпроводной функцией в основном работают на цифровых входах программируемого логического контроллера (ПЛК). В зависимости от типа эти цифровые входы имеют входное сопротивление согласно EN 61131-2. Это необходимо учитывать при выборе датчика с двухпроводной функцией. Стандартные датчики Pepperl + Fuchs с двухпроводной функцией могут работать с цифровыми входами типа 2. Цифровые входы типа 3 требуют низкого остаточного тока. Датчики с двухпроводной функцией с выходными каскадами Z4L (или Z8L) подходят для работы с цифровыми входами типа 3.
Иногда датчики с двухпроводной функцией работают от дискретных нагрузок. Необходимо учитывать индивидуальное значение сопротивления нагрузки. Технические данные для датчиков с двухпроводной функцией не дают прямой информации об этом, поскольку значение сопротивления зависит от рабочего напряжения установки, а также минимального и максимального рабочего тока датчика.
.