


преимущества и недостатки разных видов
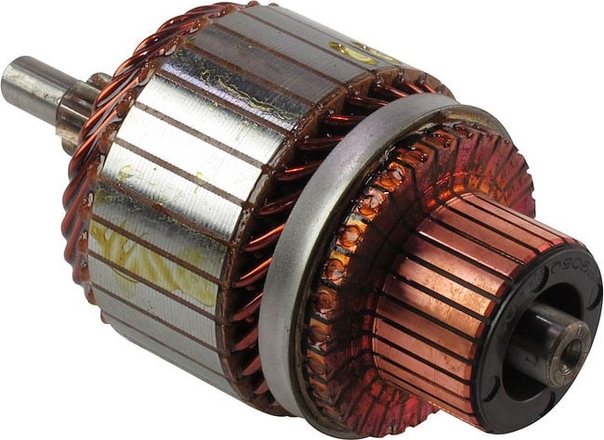
Коллекторные электродвигатели стоят в стиральных машинах (но не во всех моделях), пылесосах, электроинструменте, детских игрушках и т. д. Главной отличительно их особенностью является наличие неподвижных обмоток статора и обмоток на валу (якорь), на которые подается напряжение при помощи коллектора и графитных щеток.
Если у Вас сломался или барахлит мотор в электроинструменте и других устройствах, то не спешите его выкидывать, потому что в большинстве случаев его можно быстро и недорого отремонтировать своими руками. Как определить и устранить неисправность Вы узнаете далее из этой статьи.
Перед тем как начать искать причину в электродвигателях, сначала проверьте исправность шнура питания, кнопок включения и при наличии пуск-регулировочных устройств.
Как проверить коллекторный электродвигатель- наиболее частые поломки
Для определения и устранения неисправностей придется разбирать сам электроинструмент или электродвигатель других бытовых устройств по .
В большинстве случаев причиной поломок коллекторных двигателей является износ щеток и почернение коллектора. Изношенные щетки необходимо заменить новыми одинаковыми по форме и размерам, лучше конечно оригинальными. Меняются они очень просто- либо нужно снять или сдвинуть фиксатор или открутить болт. В некоторых моделях меняются не сами щетки, а в сборе с щеткодержателем. Не забываем подключить к контакту медный поводок. Если же щетки целы, тогда растяните прижимающие их пружины.
Если контактная часть коллектора потемнела , тогда ее необходимо обязательно почистить мелкой наждачной бумагой (нулевкой).
Иногда вместе контакта щеток с коллектором образовывается канавка. Ее необходимо проточить на станке.
На втором месте по количеству неисправностей стоит износ подшипников. О необходимости их замены в электроинструменте свидетельствует биение патрона и повышенная вибрация корпуса при работе. Как проверить и заменить подшипники подробно рассказано в . В самых запущенных случаях начинают при вращении касаться якорь и статор- придется как минимум менять якорь.
Как проверить коллекторный электродвигатель- редкие поломки
Гораздо реже происходит обрыв или выгорание в обмотках или в местах их подключения, оплавление или замыкание графитовой пылью ламелей коллектора.
В большинстве случаев это удается определить внешним осмотром. При этом обращайте внимание на:
- Целостность обмоток.
- Почернение обмоток либо всей, либо ее части.
- Надежность контактов выводов проводов с ламелями коллектора. При необходимости перепаяйте.
- Забита ли графитовой пылью пространство между ламелями. Если да то почистите.
- Наличие характерного запаха горения изоляции проводов.

Если обнаружено визуально повреждение обмотки стартера или якоря, то их потребуется заменить на новые или сдать в перемотку.
Но не всегда визуально возможно определить повреждение обмоток, поэтому следует воспользоваться мультиметром для этих целей.
Как прозвонить электродвигатель мультиметром
Включите мультиметр в режим прозвонки или омметра с пределом измерения 50-100 Ом. Как это сделать читаем а .
Иногда возникает межвитковое замыкание в обмотке, тогда определить его возможно только при помощи специального устройства- прибора проверки якорей.
Похожие материалы.
Якорь электродвигателя относится к вращающейся части, на которой собирается грязь, образуется нагар. При неисправностях можно провести диагностику в домашних условиях визуально и при помощи мультиметра. На трущихся поверхностях не должно быть сколов, царапин и трещин. При обнаружении таковых проводят меры по их устранению.
Типичные неисправности
Якорь электродвигателя при нормальных режимах работы не подвергается износу. Заменяют только щетки, замеряя допустимую длину. Но при длительных нагрузках обмотки статора начинают нагреваться, что приводит к образованию нагара.
Заменяют только щетки, замеряя допустимую длину. Но при длительных нагрузках обмотки статора начинают нагреваться, что приводит к образованию нагара.
Из-за механических воздействий якорь электродвигателя может перекоситься при повреждении подшипниковых узлов. Двигатель будет работать, но постепенный износ ламелей или пластин приведет к окончательному выходу его из строя. Но для спасения недешевого оборудования часто достаточно провести профилактический ремонт и прибором можно будет пользоваться длительное время.
К негативным факторам, влияющим на якорь электродвигателя, относят попадание влаги на металлические поверхности. Критичным является длительное воздействие влажности и появление ржавчины. Из-за рыжих скоплений и грязи происходит повышение трения, это увеличивает токовую нагрузку. Контактные части греются, припой может отслаиваться, создавая периодическую искру.
В сервисном центре могут помочь, но это потребует определённых затрат. С поломкой можно справиться и самостоятельно, ознакомившись с вопросом: как проверить якорь электродвигателя в домашних условиях. Для диагностики понадобится прибор, замеряющий сопротивление и инструменты.
Для диагностики понадобится прибор, замеряющий сопротивление и инструменты.
Как проводится диагностика неисправности?
Проверка якоря электродвигателя начинается с определения самой неисправности. Полный выход из строя этого узла происходит из-за рассыпавшихся щеток коллектора, разрушения слоя диэлектрика между пластинами, а также за счет короткого замыкания в электрической цепи. В случае искрения внутри прибора делают вывод об износе или повреждении токосъемников.
Искрение щеток начинается из-за появления зазора в месте контакта с коллектором. Этому предшествует падение прибора, высокая нагрузка на вал при заклинивании, а также нарушение целостности припоя на выводах обмоток.
Неисправность на работающем электродвигателе проявляется типичными состояниями:
- Искрение основной признак неисправности.
- Гул и трение при вращении якоря.
- Ощутимая вибрация при работе.
- Смена направления вращения при прохождении якорем траектории менее оборота.
- Появление запаха оплавляющейся пластмассы либо сильный нагрев корпуса.

Что делать при появлении перечисленных отклонений в работе?
Дальнейшая эксплуатация приборов может привести к пожару или к поражению человека электрическим током. Первым делом рекомендуется осмотреть корпус изделия, оценить проводку на целостность, отсутствие оплавленных частей и повреждения изоляции. На ощупь проверяют температуру всех частей прибора. Рукой пробуют вращать якорь, он должен перемещаться легко, без заеданий. Если механические части целые и нет загрязнений переходят к разборке.
Диагностика внутренних частей
Обмотка якоря электродвигателя не должна иметь нагара, тёмных пятен, похожих на последствия перегрева.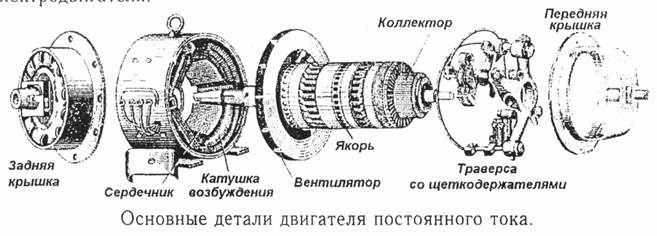 Поверхность контактных частей и области зазора не должна быть зосоренной. Мелкие частицы снижают мощность двигателя и повышают ток. Не стоит производить разборку приборов с включенной в сеть вилкой в целях безопасности проведения работ.
Поверхность контактных частей и области зазора не должна быть зосоренной. Мелкие частицы снижают мощность двигателя и повышают ток. Не стоит производить разборку приборов с включенной в сеть вилкой в целях безопасности проведения работ.
Рекомендуется проводить съемку процесса разборки для исключения сложностей при обратном процессе. Либо можно записывать на листок каждый шаг своих действий. Допускается некоторый износ щеток, ламелей. Но при обнаружении царапин следует выяснить причину их происхождения. Возможно, этому поспособствовала трещина в корпусе, которую можно заметить только при нагрузке.
Работа омметром
Искренние могло происходить из-за пропадания электрического контакта в одной из ламелей. Для замера сопротивления рекомендуется ставить щупы со стороны токосъемников. Вращая вал двигателя, наблюдают за показаниями циферблата. На экране должны быть нулевые значения. Если проскакивают цифры даже в несколько Ом, то это говорит о нагаре. При появлении бесконечного значения судят об обрыве в цепи.
Независимо от результатов далее следует проверить сопротивление между каждыми соседними ламелями. Оно должно быть одинаковым для каждого замера. При отклонениях нужно осмотреть все соединения катушек и поверхность прилегания щёток. Сами щетки должны иметь равномерный износ. При сколах и трещинах они подлежат замене.
Катушки соединяются с сердечником проводкой, которая могла отслоиться. Припой часто не выдерживает ударов от падений. У стартера ток через контакты может достигать 50А, что приводит к прогоранию некачественных соединений. Внешним осмотром определяют места повреждений. Если не обнаружили неисправности, то проводят замер сопротивления между ламелью и самой катушкой.
Если нет омметра?
При отсутствии мультиметра потребуется источник питания 12 Вольт и лампочка на соответствующее напряжение. У любого автолюбителя с таким набором не возникнет проблем. На вилку электроприбора подключают плюсовую и минусовую клеммы. В разрыв ставится лампа накаливания. Результат наблюдают визуально.
Результат наблюдают визуально.
Вал якоря вращают рукой, лампа горит без скачков яркости. Если наблюдается затухание судят о неисправном двигателе. Скорее всего, произошло межвитковое замыкание. Полное пропадание свечения свидетельствует об обрыве в цепи. Причинами могут быть неконтакт щеток, обрыв в обмотке или отсутствие сопротивления в одной из ламелей.
Как «оживить» неисправный прибор?
Ремонт якоря электродвигателя начинают только после полной уверенности в неисправности узла. Царапины и сколы на ламелях убирают круговой проточкой поверхности. Нагар и копоть можно снять чистящими средствами для контактных электрических соединений. Разбитые подшипники перепрессовывают и меняют на новые. Важно соблюсти балансировку вала при сборке.
Вращение должно быть лёгким и без шума. Поврежденную изоляцию восстанавливают, можно использовать обычную изоленту. Соединения, вызывающие подозрения, лучше пропаять заново. При проблемах с катушками якоря рекомендуется прибегнуть к перемотке, которую можно выполнить самостоятельно.
Восстановление катушек
Перемотать якорь электродвигателя можно в условиях гаража, только требуется быть осторожным при нанесении каждого витка. Медная проводка подбирается аналогичной намотанной. Сечение нельзя менять, это приведёт к нарушению скоростных режимов работы двигателя. Бумага диэлектрическая потребуется для отделения обмоток. Катушки в конце заливают лаком.
Потребуется паяльник и навыки его использования. Места соединений обрабатывают кислотой, для нанесения оловянно-свинцового припоя пользуются канифолью. При демонтировании старой обмотки подсчитывают количество витков и наносят аналогичное количество новой намотки.
Корпус должен быть очищен от старого лака и других включений. Для этого подходит напильник, наждачка или горелка. Для якоря изготавливают гильзы, материалом служит электротехнический картон. Полученные заготовки укладывают в пазы. Намотанные катушки следует делать правыми витками. Выводы со стороны коллектора перематывают капроновой нитью.
Каждый провод припаивается к соответствующей ламели. Сборка должна заканчиваться очередными замерами сопротивления контактных соединений. Если все в норме и нет можно проверять работу электродвигателя под напряжением.
Cтраница 1
Якорь электродвигателя состоит из вала, на который напрессовывается сердечник, набранный из лакированной электротехнической стали толщиной 0 5 мм, с пазами для обмотки, и коллектор. Обмотка якоря двухслойная с диаметральным шагом из провода марки ПЭЛШКО. Коллектор набирается из пластин красной меди, изолированных друг от друга миканитовыми прокладками. Армирование коллектора выполняется на пластмассе и осуществляется при помощи стальных колец, укладываемых перед опрессовкой коллектора в выточки, имеющие форму ласточкиного хвоста. Для предотвращения замыкания коллекторных пластин кольца перед укладкой изолируются лентой из стекловолокна. В результате армирования прочность коллектора увеличивается. Присоединение обмотки к коллектору производится так же, как и в двигателях постоянного тока.
Якорь электродвигателя разбирают в такой последовательности: отвертывают конусный ролик 4 (см. рис. 82) с вала якоря; при помощи съемника спрессовывают подшипник 5 и вентилятор 8; снимают маслоотбойные кольца 2; заменяют негодные подшипники, снимают обмотку, наматывают новую, собирают якорь и электродвигатель. Центровку якоря по горизонтали производят крышкой (заглушкой) 19 подшипника.
Якорь электродвигателя состоит из пакета пластин трансформаторной стали, якорной обмотки, вентилятора (крыльчатки) и коллектора. Коллектор якоря имеет медные пластины (ламели), между которыми положены прокладки из миканита.
| Схема вращения натирочных. |
Якорь электродвигателя состоит из пакета пластин трансфор-матерной стали, якорной обмотки, вентилятора (крыльчатки) и коллектора.
Якорь электродвигателя вращается на двух подшипниках, расположенных в подшипниковых щитах. На валу якоря для охлаждения электродвигателя имеется центробежный вентилятор. Воздух засасывается через жалюзи крышек подшипникового щита со стороны коллектора, проходит через машину и выбрасывается вентилятором через решетки верхнего подшипникового щита.
Воздух засасывается через жалюзи крышек подшипникового щита со стороны коллектора, проходит через машину и выбрасывается вентилятором через решетки верхнего подшипникового щита.
Якорь электродвигателя вращается в двух самоустанавливающихся бронзографитовых втулках, пропитанных турбинным маслом.
Якорь электродвигателя собран из листов 7 такой же формы, как и якорь двигателя ДП-4. Катушки 6 обмотки якоря намотаны на зубцы сердечника и изолированы от них полосками электрокартона. Три выводных конца катушек якоря соединены между собой, а три другие припаяны к трем коллекторным пластинам, запрессованным в пластмассу.
Электрические двигатели предназначены для преобразования электрической энергии в механическую. Первые их прототипы были созданы в 19 веке, а сегодня эти устройства максимально интегрированы в жизнь современного человечества. Примеры их использования можно встретить в любой сфере жизнедеятельности: от общественного транспорта до домашней кофемолки.
Электрический двигатель: вид в разрезе
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
 Она исполняет роль токопроводящего вращательного контура.
Она исполняет роль токопроводящего вращательного контура.Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Классификация электрических двигателей
Все электродвигатели между собой классифицируют в первую очередь по типу тока, протекающему через них. В свою очередь, каждая из этих групп тоже делить на несколько видов, в зависимости от технологических особенностей.
Двигатели постоянного тока
На маломощных двигателях постоянного тока магнитное поле создается постоянным магнитом, устанавливаемым в корпусе устройства, а обмотка якоря закрепляется на вращающемся валу. Принципиальная схема ДПТ выглядит следующим образом:
Обмотка, расположенная на сердечнике, изготавливается из ферромагнитных материалов и состоит из двух частей, последовательно соединенных между собой. Своими концами они подсоединяются к коллекторным пластинам, к которым прижимаются графитовые щетки. На одну из них подается положительный потенциал от источника постоянного тока, а на другую – отрицательный.
После подачи питания на двигатель происходит следующее:
- Ток от нижней «плюсовой» щетки подается на ту коллекторную пластину, к контактной платформе которой она подключена.
- Прохождение тока по обмотке на коллекторную пластину (обозначено пунктирной красной стрелкой), подключенную к верхней «отрицательной» щетке создает электромагнитное поле.
- Согласно правилу буравчика, в правой верхней части якоря возникает магнитное поле южного, а в левой нижней — северного магнитного полюса.
- Магнитные поля с одинаковым потенциалом отталкиваются друг от друга и приводят ротор во вращательное движение, обозначенное на схеме красной стрелкой.
- Устройство коллекторных пластин приводит к смене направления протекания тока по обмотке во время инерционного вращения, и рабочий цикл повторяется вновь.

Самый простой электрический двигатель
При очевидной простоте конструкции существенным недостатком таких двигателей является низкий КПД, обусловленный большими потерями энергии. Сегодня ДПТ с постоянными магнитами используются в простых бытовых приборах и детских игрушках.
Устройство двигателей постоянного тока большой мощности, используемых в производственных целях, не предусматривает использование постоянных магнитов (они занимали бы слишком много места). В этих машинах используется следующая конструкция:
- обмотка состоит из большего количества секций, представляющих собой металлический стержень;
- каждая обмотка отдельно подключается к положительному и отрицательному полюсу;
- количество контактных площадок на коллекторном устройстве соответствует количеству обмоток.

Таким образом, снижение потерь электроэнергии обеспечивается плавным подключением каждой обмотки к щеткам и источнику питания. На следующей картинке представлена конструкция якоря такого двигателя:
Устройство электрических двигателей постоянного тока позволяет легко обратить направление вращения ротора с помощью простой смены полярности на источнике питания.
Функциональные особенности электродвигателей определяются наличием некоторых «хитростей», к которым относится сдвиг токосъемных щеток и несколько схем подключения.
Сдвиг узла токосъемных щеток относительно вращения вала происходит после запуска двигателя и изменения подаваемой нагрузки. Это позволяет компенсировать «реакцию якоря» — эффект, снижающий эффективность машины за счет торможения вала.
Есть три способа подключения ДПТ:
- Схема с параллельным возбуждением предусматривает параллельное подключение независимой обмотки, как правило, регулируемой реостатом. Так обеспечивается максимальная стабильность скорости вращения и её плавная регулировка. Именно благодаря этому двигатели с параллельным возбуждением находят широкое применение в грузоподъемном оборудовании, на электрическом транспорте и станках.
- Схема с последовательным возбуждением тоже предусматривает использование дополнительной обмотки, но подключается она последовательно с основной. Это позволяет при необходимости резко увеличить крутящий момент двигателя, к примеру, на старте движения железнодорожного состава.
- Смешанная схема использует преимущества обоих способов подключения, описанных выше.
 Именно благодаря этому двигатели с параллельным возбуждением находят широкое применение в грузоподъемном оборудовании, на электрическом транспорте и станках.
Именно благодаря этому двигатели с параллельным возбуждением находят широкое применение в грузоподъемном оборудовании, на электрическом транспорте и станках.Биполярный электрический двигатель
Двигатели переменного тока
Главным отличием этих двигателей от описанных ранее моделей заключается в токе, протекающем по их обмотке. Он описывает по синусоидальному закону и постоянно меняет свое направление. Соответственно и питание этих двигателей осуществляется от генераторов со знакопеременной величиной.
Одним из главных конструктивных отличий является устройство статора, представляющего собой магнитопровод со специальными пазами для расположения витков обмотки.
Двигатели переменного тока классифицируют по принципу работы на синхронные и асинхронные. Коротко говоря, это означает, что в первых частота вращения ротора совпадает с частотой вращения магнитного поля в статоре, а во вторых – нет.
Синхронные двигатели
В основе работы синхронных электродвигателей переменного тока тоже лежит принцип взаимодействия полей, возникающих внутри устройства, однако в их конструкции постоянные магниты закрепляются на роторе, а по статору проводится обмотка. Принцип их действия демонстрирует следующая схема:
Проводники обмотки, по которой проходит ток, показанные на рисунке в виде рамки. Вращение ротора происходит следующим образом:
- На определенный момент времени ротор с закрепленным на нем постоянным магнитом находится в свободном вращении.
- На обмотке в момент прохождения через нее положительной полуволны формируется магнитное поле с диаметрально противоположными полюсами Sст и Nст. Оно показано на левой части приведенной схемы.
- Одноименные полюса постоянного магнита и магнитного поля статора отталкиваются друг от друга и приводят двигатель в положение, показанное на правой части схемы.

В реальных условиях для создания постоянного плавного вращения двигателя используется не одна катушка обмотки, а несколько. Они поочередно пропускают через себя ток, благодаря чему создается вращающееся магнитное поле.
Асинхронные двигатели
А асинхронном двигателе переменного тока вращающееся магнитное поле создается тремя (для сети 380 В) обмотками статора. Их подключение к источнику питания осуществляется через клеммную коробку, а охлаждение — вмонтированным в двигатель вентилятором.
Ротор, собранный из нескольких замкнутых между собой металлических стержней, жестко соединен с валом, составляя с ним одно целое. Именно из-за соединения стержней межу собой этот тип ротора называется короткозамкнутым. Благодаря отсутствию токопроводящих щеток в данной конструкции значительно упрощается техническое обслуживание двигателя, увеличивается срок службы и надежность. Главной причиной выхода из строя двигателей этого типа является износ подшипников вала.
Главной причиной выхода из строя двигателей этого типа является износ подшипников вала.
Принцип работы асинхронного двигателя основывается на законе электромагнитной индукции – если частота вращения электромагнитного поля обмоток статора превышает частоту вращения ротора, в нем наводится электродвижущая сила. Это важно, поскольку при одинаковой частоте ЭДС не возникает и, соответственно, не возникает вращения. В действительности нагрузка на вал и сопротивление от трения подшипников всегда замедляет ротор и создает достаточные для работы условия.
Главным недостатком двигателей данного типа является невозможность получения постоянной частоты вращения вала. Дело в том, что рабочие характеристики устройства изменяются в зависимости от различных факторов. К примеру, без нагрузки на вал циркулярная пила вращается с максимальной скоростью. Когда мы подводим к пильному полотну доску и начинаем её резать, частота вращения диска заметно снижается. Соответственно, снижается и скорость вращения ротора относительно электромагнитного поля, что приводит к наведению еще большей ЭДС. Это увеличивает потребляемый ток и рабочая мощность мотора увеличивается до максимальной.
Это увеличивает потребляемый ток и рабочая мощность мотора увеличивается до максимальной.
Принцип работы электрического мотора
Важно подбирать двигатель подходящей мощности – слишком низкая приведет к повреждению короткозамкнутого ротора из-за превышения расчетного максимума ЭДС, а слишком высокая приводит к необоснованным энергозатратам.
Асинхронные двигатели переменного тока рассчитаны на работу от трехфазной электрической сети, однако могут быть подключены и в однофазную сеть. Так, например, они используются в стиральных машинах и станках для домашних мастерских. Однофазный двигатель имеет примерно на 30% более низкую мощность, по сравнению с трехфазным – от 5 до 10 кВт.
Ввиду простоты исполнения и надежности асинхронные двигатели переменного тока наиболее распространены не только в производственном оборудовании, но и в бытовой технике.
Универсальные коллекторные двигатели
Во многих бытовых электроприборах необходимо наличие высокой скорости вращения двигателя и крутящего момента при малых пусковых токах и плавной регулировке. Всем этим требования удовлетворяют коллекторные двигатели, называемые универсальными. По своему устройству они очень похожи на двигатели постоянного тока с последовательным возбуждением.
Всем этим требования удовлетворяют коллекторные двигатели, называемые универсальными. По своему устройству они очень похожи на двигатели постоянного тока с последовательным возбуждением.
Главным отличием от ДПТ является магнитная система, комплектуемая несколькими изолированными друг от друга листами электротехнической стали, к полюсам которых подсоединены по две секции обмотки. Такая конструкция снижает нагрев элементов токами Фуко и перемагничивание.
Высокая синхронность магнитных полей в универсальных коллекторных двигателях сохраняет высокую скорость вращения даже под большой нагрузкой на вал. Поэтому их используют в маломощном быстроходном оборудовании и домашней технике. При подключении в цепь регулируемого трансформатора появляется возможность плавной настройки частоты вращения.
Главный недостаток таких электромоторов заключается в низком моторесурсе, обусловленном быстрым стиранием графитовых щеток.
Устройство и принцип работы электроинструмента
Содержание:
- 1. Коллекторный электродвигатель постоянного тока
- 1.1. Принцип действия
- 1.2. Недостатки
- 2. Бесколлекторный двигатель
- 3. Редуктор
- 3.1. Особенности редукторов
- 4. Устройства управления
- 5. Для безопасной работы
 Коллекторный электродвигатель постоянного тока
Коллекторный электродвигатель постоянного токаДвигатель, редуктор, устройства управления и детали для безопасной работы — вот основные узлы каждого электроинструмента. Для ручной машины важно, что бы она была как можно легче и меньше. Кроме того, от нее требуется высокая скорость, которую можно регулировать. Этим условиям отвечают двигатели постоянного тока. Они подразделяются на коллекторные и вентильные.
Коллекторный электродвигатель постоянного тока
Что бы понять, как электрическая энергия превращается в механическую, познакомимся с устройством двигателя. Его основные узлы: статор (индуктор), ротор (якорь) и примыкающий к нему щеточноколлекторный узел.
Статор — неподвижная стальная деталь, к которой прикрепляются главные и добавочные полюсы.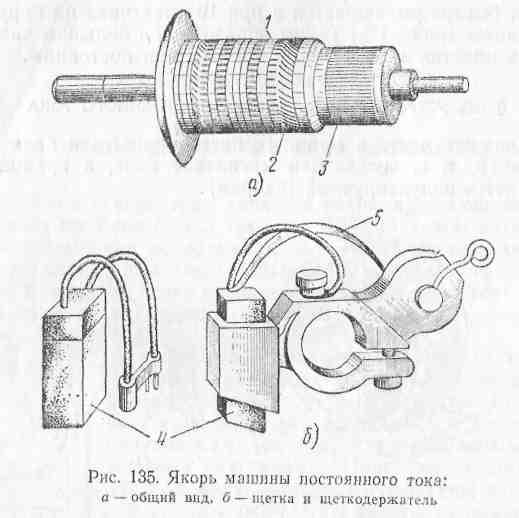 Обмотка главных полюсов создает магнитное поле, а добавочная улучшает работу коллектора.
Обмотка главных полюсов создает магнитное поле, а добавочная улучшает работу коллектора.
Вращающийся ротор устанавливается на валу. Он состоит из сердечника и обмотки. Ее концы соединяются с пластинами коллектора, к которому, в свою очередь, примыкают щетки — через них обмотка якоря соединяется с внешней цепью. Щетки занимают определенное положение по отношению к полюсам двигателя. В некоторых электроинструментах имеется поворотный щеткодержатель-траверса, благодаря ему положение щеток можно изменять. Это позволяет сохранить мощность при работе в режиме реверса. В остальных случаях вращение в обратном режиме включают электронные магнитные пускатели.
Принцип действия
Двигатель работает за счет электромагнитной индукции. При подаче напряжения на графитовые щетки, они замыкаются с ротором. По его обмотке проходит электрический ток. Так как ротор находится внутри магнитного поля статора, на него начинают действовать силы Ампера. На концах якоря они направлены в противоположные стороны, что создает крутящий момент. Ротор поворачивается на 180°. В этот момент крутящий момент становится равным нулю. Что бы вращение продолжалось необходимо переключить направление тока — провести коммутацию. По коллектору, который начал вращаться вместе с ротором, скользят щетки, в нужный момент они переходят с одной пластины на другую, меняя направление тока в обмотках ротора.
Ротор поворачивается на 180°. В этот момент крутящий момент становится равным нулю. Что бы вращение продолжалось необходимо переключить направление тока — провести коммутацию. По коллектору, который начал вращаться вместе с ротором, скользят щетки, в нужный момент они переходят с одной пластины на другую, меняя направление тока в обмотках ротора.
Частота вращения двигателя регулируется за счет изменения магнитного поля статора, которое в свою очередь генерируется током возбуждения двигателя. На этот ток можно повлиять реостатом, транзистором, т. е. любым устройством с активным сопротивлением. Таким образом, осуществляется электронная регулировка скорости.
Недостатки
Слабое место коллекторного двигателя — графитовые щетки, в процессе эксплуатации они истираются. При интенсивной нагрузке их приходится часто заменять. Кроме того, такой двигатель шумит и вибрирует во время работы, особенно на больших скоростях. Бороться с этими недостатками помогает использование в конструкциях качественных деталей и внешних антивибрационных элементов.
Бесколлекторный двигатель
Существует вид двигателей постоянного тока, в которых отсутствует щеточно-коллекторный узел. Ток в них изменяется с помощью электронных переключателей, что избавляет конструкцию от наличия щеток. Такие моторы называют вентильными. Принцип их работы аналогичен описанному выше. От коллекторных их отличает конструкция: магниты размещены на роторе, а обмотка на статоре.
Датчик углового положения ротора указывает электронному блоку, когда нужно менять направление тока. Единственный недостаток вентильного двигателя — дорогостоящие детали. По этой причине в ручных электроинструментах в основном используются коллекторные двигатели, с вентильным — лишь единичные модели: компании Makita и Hitachi предлагают аккумуляторные ударные шуруповерты, называя их инструментами будущего.
Редуктор
Механическую энергию, которую вырабатывает двигатель, нужно передать на рабочий орган машины (шпиндель). Эту функцию выполняет редуктор. Часто его называют понижающим. Скорость вращения входного вала высокая, механическая передача (одна или несколько) преобразует ее так, что на выходном валу получается меньшее число оборотов, но высокий крутящий момент.
В ручных машинах применяют разнообразные виды механических передач: зубчатая, ременная, цепная, планетарная. В большинстве случаев на выходе получается вращение. Но есть инструменты, в которых этот вид движения преобразуется в другой.
Ударный механизм перфоратора работает следующим образом. На валу установлен «пьяный» подшипник — качающийся привод, которой преобразует вращательное движение от двигателя в поступательное — цилиндра. В пространстве между цилиндром, поршнем и бойком, находится воздух. Он сжимается и заставляет поршень перемещаться сначала вперед к бойку, а затем возвращает его в исходное положение.
Редуктор электролобзика преобразует вращение вала двигателя в возвратно-поступательное движение ползуна. Расположенный вертикально ползун перемещает пилку вниз и вверх. Пилка опирается на опорный ролик. Наличие функции маятникового хода означает, что опорный ролик и вилка, на которой он держится, могут отклоняться назад. В результате пилка, кроме основного, совершает движение вперед и назад. Это увеличивает скорость прямолинейного реза. Ступени маятникового хода задаются степенью отклонения ролика.
В вибрационных шлифмашинах эксцентрик, установленный на валу, так преобразует вращательное движение, что подошва всего лишь колеблется с маленькой амплитудой. В эксцентриковых шлифовальных машинах вращательное движение рабочего органа сохраняется, но эксцентрик добавляет ему колебания. Такие преобразования позволяют выполнять с помощью этих инструментов тонкую шлифовку.
Особенности редукторов
Для пользователя имеет значение, из каких деталей изготовлен редуктор, от этого зависит его надежность и срок службы всего электроинструмента. В моделях бытового класса часто используются шестерни из пластмассы, в профессиональных — редуктор полностью металлический. Преимуществом считается, если и корпус то же выполнен из металла. В этом случае инструмент лучше выдерживает большие нагрузки и удары.
Важной функцией, которую может выполнять редуктор, является ступенчатое изменение частоты вращения выходного вала. Она доступна на отдельных моделях дрелей, шуруповертов. Механическое переключение скоростей позволяет работать с меньшей скоростью и большим крутящим моментом на первой передаче и с более высоким числом оборотов — на второй. Если сравнить технические характеристики в цифрах, то можно сразу заметить, что инструменты с двухскоростным (трехскоростные встречаются редко) редуктором отличаются большим числом оборотов по сравнению с обычными моделями, в которых обороты регулируются только электроникой. Эта особенность обеспечивает высокую производительность и оптимальный подбор режима работы.
Устройства управления
Для питания двигателя в электроинструментах используются различные схемы, в том числе микропроцессорные электроприводы. Обязательным элементом любой системы является выпрямитель. Он преобразует переменный ток сети в постоянный, который подается на электродвигатель. В аккумуляторных инструментах, которые питаются от батарей, выпрямитель не требуется.
Скорость вращения регулирует преобразователь частоты. Самый простой его вариант — это несколько реле, с помощью которых число оборотов можно установить вручную. В систему так же могут входить магнитные пускатели с кнопкой для изменения направления вращения двигателя (функция реверса). Устройство управления двигателем размещают под рукояткой или вблизи нее, где на корпус выводятся курок-выключатель, колесико регулировки скорости, кнопка реверса.
Для безопасной работы
К ручным инструментам предъявляются особые требования, связанные с безопасностью работы. Электропроводящие детали покрывают специальным материалом для защиты пользователя от поражения током. Многие производители, кроме основной изоляции, на случай ее повреждения, применяют дополнительную, получая, таким образом, двойную. Остальные защитные устройства, такие как муфты, фиксаторы применяются в зависимости от вида инструмента.
Как проверить и сделать коллекторный электродвигатель
В домашнем хозяйстве практически все электродвигатели коллекторные- это синхронные устройства. Как они устроены и работают читайте в нашей предыдущей статье.
Коллекторные электродвигатели стоят в стиральных машинах (но не во всех моделях), пылесосах, электроинструменте, детских игрушках и т. д. Главной отличительно их особенностью является наличие неподвижных обмоток статора и обмоток на валу (якорь), на которые подается напряжение при помощи коллектора и графитных щеток.
Если у Вас сломался или барахлит мотор в электроинструменте и других устройствах, то не спешите его выкидывать, потому что в большинстве случаев его можно быстро и недорого отремонтировать своими руками. Как определить и устранить неисправность Вы узнаете далее из этой статьи.
Перед тем как начать искать причину в электродвигателях, сначала проверьте исправность шнура питания, кнопок включения и при наличии пуск-регулировочных устройств.
Как проверить коллекторный электродвигатель- наиболее частые поломки
Для определения и устранения неисправностей придется разбирать сам электроинструмент или электродвигатель других бытовых устройств по этой инструкции. Только перед тем как приступить к разборке, обратите внимание на искрение в контактно-щеточном механизме. Если оно будет повышенным (как на рисунке у нижней щетки), то это может свидетельствовать об износе или плохом контакте щеток, реже о межвитковом замыкании в коллекторе.
В большинстве случаев причиной поломок коллекторных двигателей является износ щеток и почернение коллектора. Изношенные щетки необходимо заменить новыми одинаковыми по форме и размерам, лучше конечно оригинальными. Меняются они очень просто- либо нужно снять или сдвинуть фиксатор или открутить болт. В некоторых моделях меняются не сами щетки, а в сборе с щеткодержателем. Не забываем подключить к контакту медный поводок. Если же щетки целы, тогда растяните прижимающие их пружины.
Если контактная часть коллектора потемнела, тогда ее необходимо обязательно почистить мелкой наждачной бумагой (нулевкой).
Иногда вместе контакта щеток с коллектором образовывается канавка. Ее необходимо проточить на станке.
На втором месте по количеству неисправностей стоит износ подшипников. О необходимости их замены в электроинструменте свидетельствует биение патрона и повышенная вибрация корпуса при работе. Как проверить и заменить подшипники подробно рассказано в этой статье. В самых запущенных случаях начинают при вращении касаться якорь и статор- придется как минимум менять якорь.
Как проверить коллекторный электродвигатель- редкие поломки
Гораздо реже происходит обрыв или выгорание в обмотках или в местах их подключения, оплавление или замыкание графитовой пылью ламелей коллектора.
В большинстве случаев это удается определить внешним осмотром. При этом обращайте внимание на:
- Целостность обмоток.
- Почернение обмоток либо всей, либо ее части.
- Надежность контактов выводов проводов с ламелями коллектора. При необходимости перепаяйте.
- Забита ли графитовой пылью пространство между ламелями. Если да то почистите.
- Наличие характерного запаха горения изоляции проводов.
Если обнаружено визуально повреждение обмотки стартера или якоря, то их потребуется заменить на новые или сдать в перемотку.
Но не всегда визуально возможно определить повреждение обмоток, поэтому следует воспользоваться мультиметром для этих целей.
Как прозвонить электродвигатель мультиметром
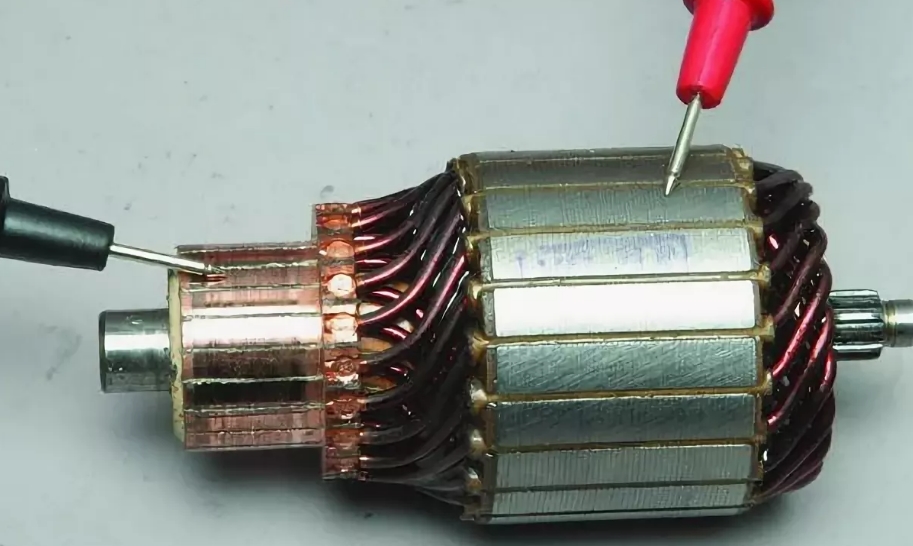
Включите мультиметр в режим прозвонки или омметра с пределом измерения 50-100 Ом. Как это сделать читаем а этой инструкции.
- Прозвоните попарные выводы обмоток на ламели коллектора. Все значения сопротивления должны быть равны.
- Затем проверьте сопротивление между ламелями и корпусом якоря, как показано на правой картинке. Оно должно быть бесконечным.
- Проверить целостность обмотки статора можно при помощи прозвонки ее выводов, как показано на левой картинке.
- Проверьте цепь между корпусом статора и выводами обмоток. При пробое на корпус, эксплуатировать электроинструмент или мотор запрещено.
Иногда возникает межвитковое замыкание в обмотке, тогда определить его возможно только при помощи специального устройства- прибора проверки якорей.
Заявка на патент США на фиксатор лопасти ротора и инструмент для его установки, в частности, для артроскопической установки. Заявка на патент (заявка № 20020016602 от 7 февраля 2002 г.)
ПЕРЕКРЕСТНЫЕ ПРИЛОЖЕНИЯ& lsqb; 0001 & rsqb; Эта заявка испрашивает приоритет предварительной заявки США № 60/215 690, поданной 30 июня 2000 г.
Уровень техники& lsqb; 0002 & rsqb; Изобретение относится к застежкам или анкерам и, в частности, к застежкам или анкерам для крепления к биологической ткани, в частности к кости.Изобретение находит конкретное применение при закреплении швов на кости, таком как прикрепление разорванных связок или заменителей связок к кости посредством прикрепления шовного материала к фиксатору.
& lsqb; 0003 & rsqb; В области медицины часто необходимо надежно прикрепить к кости такие элементы, как связки (например, связки вращающей манжеты, передние крестообразные связки) и протезы. Для такого крепления сначала необходимо, чтобы анкер был закреплен внутри самой кости.После закрепления анкера связка или протез можно прикрепить к анкеру, например, с помощью швов, идущих от анкера.
& lsqb; 0004 & rsqb; Существуют различные методы закрепления якоря внутри кости. В патенте США Например, в патенте США №6117616, переуступленном Li Medical Technologies, Inc., в кости сначала делается продольно проходящая канавка. Анкер, расположенный перпендикулярно рукоятке для введения, затем вставляется в паз и ввинчивается в кость до тех пор, пока анкер не будет надежно удерживаться в ней.Поскольку анкер расположен перпендикулярно рукоятке, необходимо подготовить паз, достаточно большой, чтобы вместить размер анкера, включая всю его длину.
& lsqb; 0005 & rsqb; Кости состоят из относительно твердого внешнего слоя ткани, состоящего из клеток кортикальной кости, и более мягкого внутреннего слоя ткани, состоящего из губчатых клеток. Делая такие канавки в кости, необходимо удалить большее количество более твердых кортикальных костных клеток, тем самым уменьшая силу прикрепления, доступную для закрепления анкера внутри кости.
& lsqb; 0006 & rsqb; В патенте США В US 6 102 934, также переуступленном Li Medical Technologies, Inc., устройство для установки лопастей ротора включает в себя толкающий элемент, имеющий на нем кулачковую поверхность, которая входит в зацепление с якорем. Толкающий элемент скользит в канале вала. Манжета расположена на неподвижном захватном элементе ручки и снабжена резьбой. Когда ручка вращается и захватный элемент удерживается в неподвижном состоянии, канал вала также вращается, сообщая это вращение толкателю и, следовательно, втулке.Затем резьба манжеты перемещается относительно резьбы неподвижного захватного элемента, заставляя манжету перемещаться вдоль ручки, передавая поступательное движение толкающему элементу, который, в свою очередь, вызывает вращательное движение анкера вокруг оси, перпендикулярной к оси вала через зацепление анкера с кулачковой поверхностью. Чтобы вставить фиксатор в кость, хирург должен повернуть ручку устройства, а также удерживать неподвижный зажимной элемент, чтобы воротник мог проходить по ручке.Эта операция может быть обременительной и трудной для выполнения. Раскрыт вариант осуществления, в котором пружинный спусковой механизм может использоваться для приложения силы к толкающему каналу, когда пружинный спусковой механизм приводится в действие. Однако срабатывание спускового крючка — это дополнительная манипуляция, которую необходимо выполнить. Во многих хирургических операциях руки хирурга заняты множеством задач, поэтому важно предоставить устройство, которое можно было бы приводить в действие с минимальным количеством движений и / или одной рукой.
& lsqb; 0007 & rsqb; В одновременном рассмотрении U.С. приложение Сер. В № 09/580,777, поданном 26 мая 2000 г., описывается якорь лопасти ротора и инструмент для него. Инструмент и якорь содержат ручку, имеющую первую ось, которая проходит в продольном направлении относительно ручки, и вторую ось, которая проходит перпендикулярно первой оси, якорь, шарнирно соединенный с ручкой, так что якорь может поворачиваться вокруг второй оси и смещающий элемент, расположенный на ручке, смещающий элемент смещает якорь в положение, которое по существу перпендикулярно первой оси, ручка может вращаться вокруг первой оси, чтобы позволить якорю вращаться вокруг первой оси, смещающий элемент вызывает анкер для проникновения в отверстие в биологической ткани путем поворота вокруг второй оси и для ввинчивания в отверстие для достижения положения, которое по существу перпендикулярно первой оси, когда анкер вставляется в отверстие в биологической ткани .
& lsqb; 0008 & rsqb; В патенте США В US 5203787, Noblitt et al., В кости просверливается отверстие, а затем в отверстие вставляется фиксирующее устройство так, чтобы продольная ось фиксирующего устройства была параллельна продольной оси отверстия. Затем к шовному материалу, соединенному с фиксирующим устройством, прикладывают силу, тем самым заставляя фиксирующее устройство вращаться внутри губчатых ячеек кости, так что фиксатор проходит перпендикулярно продольной оси отверстия.Затем анкер удерживается внутри кости, упираясь во внутреннюю часть более твердых кортикальных костных клеток. Однако метод Noblitt et al. Требует сложных манипуляций с нитью для достижения желаемой ориентации фиксатора.
& lsqb; 0009 & rsqb; См. Также патент США. № 5,569,302 Джонсону на устройство и способ прикрепления объекта к кости.
& lsqb; 0010 & rsqb; Более того, современные тенденции в хирургии включают восстановление функций и формы тела или восстановление анатомических структур с использованием минимально инвазивных хирургических методов.Способность хирургически восстанавливать поврежденные ткани или суставы, создавая как можно меньше и как можно меньше разрезов, и с легкостью манипулирования, причиняет меньше травм пациенту, меньше боли и в целом лучшие клинические результаты.
& lsqb; 0011 & rsqb; Таким образом, в данной области техники существует потребность в минимально инвазивном способе и устройстве, которые более надежно прикрепляют якорь к кости, чем устройства и методы предшествующего уровня техники, которые делают это с минимальным количеством действий оператора и которые могут использоваться артроскопически. с использованием малоинвазивных хирургических методов.
& lsqb; 0012 & rsqb; Настоящее изобретение является усовершенствованием вышеупомянутых устройств в том, что анкер, по меньшей мере, частично скрыт и подпружинен, так что возможны прямое осевое введение и артроскопическое использование.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ& lsqb; 0013 & rsqb; Поэтому целью настоящего изобретения является создание устройства и минимально инвазивного способа для простой и надежной доставки якоря в ткани человека.
& lsqb; 0014 & rsqb; Еще одной задачей изобретения является создание устройства и способа для установки якоря в ствол скважины, по существу, выровненного со стволом скважины, и после того, как он будет вставлен, приведен в действие так, чтобы он входил в контакт со стенками ствола скважины, перемещаясь в положение, по существу перпендикулярное стволу скважины. скважина.
& lsqb; 0015 & rsqb; Такой анкер может быть подходящим, например, для восстановления вращательной манжеты плеча и других повреждений связок, так что обеспечивается соответствующая прочность крепления.
& lsqb; 0016 & rsqb; Еще одной целью изобретения является создание такого устройства, которое подходит для использования артроскопа в тканях тела.
& lsqb; 0017 & rsqb; Настоящее изобретение направлено на устройство и способ доставки анкерного элемента, который устанавливается в биологической ткани.Способ доставки анкерного элемента в биологическую ткань включает следующие основные этапы:
& lsqb; 0018 & rsqb; (а) доступ и подготовка намеченного сайта вставки;
& lsqb; 0019 & rsqb; (b) вставка в участок через канюлю или иным образом анкерного элемента, который устанавливается посредством приложения вращательного движения;
& lsqb; 0020 & rsqb; (c) после введения в участок анкерный элемент входит в контакт с тканью, перемещаясь из первого положения, по существу выровненного с отверстием на участке, в по существу перпендикулярное положение (к углу введения) за счет силы вращения.Этапы с (а) по (с) могут выполняться с помощью открытых или минимально инвазивных хирургических методов, то есть артроскопических методов.
& lsqb; 0021 & rsqb; В соответствии с дополнительным аспектом изобретение включает способ крепления анкера к биологической ткани, при этом указанный анкер устанавливается с возможностью отсоединения и с возможностью поворота на инструмент для вставки, указанный анкер имеет продольную ось, указанный инструмент для вставки имеет первую ось, которая проходит в продольном направлении относительно к указанному инструменту для вставки и второй оси, которая проходит перпендикулярно указанной первой оси, причем указанный способ включает следующие этапы: удерживание с возможностью отсоединения указанного анкера на дальнем конце указанного инструмента для вставки, при этом указанный анкер удерживается, по меньшей мере, частично внутри элемента оболочки для вставки. орудие труда; вставку указанного анкера, удерживаемого указанным инструментом для вставки, при этом указанная продольная ось указанного анкера расположена в ориентации, которая не перпендикулярна указанной первой оси, в отверстие в указанной биологической ткани; приведение в действие элемента на проксимальном конце указанного инструмента для вставки, чтобы таким образом переместить указанный анкер из указанной оболочки в дистальном направлении; приложение смещающей силы к якорю для смещения указанного якоря в положение, которое по существу перпендикулярно указанной первой оси; указанная смещающая сила заставляет указанный якорь вращаться вокруг второй оси и зацепляться с боковой стенкой указанного отверстия и проникать в указанную боковую стенку; вращение упомянутого инструмента вокруг упомянутой первой оси, посредством чего упомянутый анкер ввинчивается в упомянутый объект, когда упомянутый инструмент для вставки вращается вокруг упомянутой первой оси и одновременно вращается вокруг упомянутой второй оси, пока упомянутый анкер не достигнет ориентации, по существу, перпендикулярной упомянутой первой оси; когда анкер закреплен в указанной боковой стенке, высвобождение анкера из указанного установочного инструмента, оставляя анкер закрепленным в биологической ткани; и извлечение установочного инструмента.
& lsqb; 0022 & rsqb; Вышеупомянутые и другие цели также достигаются с помощью инструмента для крепления анкера к биологической ткани, указанный инструмент содержит: ручку, полый элемент оболочки, соединенный с ручкой, имеющий первую ось, которая проходит продольно по отношению к указанной ручке, и вторую. ось, которая проходит перпендикулярно указанной первой оси; дистальный конец указанного элемента оболочки выполнен с возможностью поворота и отсоединения удерживания анкера, так что указанный анкер может поворачиваться вокруг указанной второй оси, и приспособлен для удерживания анкера, по меньшей мере, частично окруженного указанным элементом оболочки в первом положении; смещающий элемент, приспособленный для смещения упомянутого якоря вокруг упомянутой второй оси к положению, которое по существу перпендикулярно упомянутой первой оси; толкающий элемент, приспособленный для приложения силы к упомянутому якорю, чтобы заставить упомянутый якорь перемещаться из упомянутого первого положения во второе положение дистально из упомянутого элемента оболочки; указанная ручка может вращаться вокруг указанной первой оси, чтобы позволить указанному якорю, находящемуся в указанном втором положении вне элемента оболочки, вращаться вокруг указанной первой оси, причем указанный смещающий элемент заставляет указанный якорь проникать в отверстие в указанной биологической ткани путем поворота вокруг указанную вторую ось, тем самым ввинчивая в указанное отверстие для достижения положения, которое по существу перпендикулярно указанной первой оси, когда указанный анкер вставлен в указанное отверстие в указанной биологической ткани.
& lsqb; 0023 & rsqb; Эти, а также другие аспекты станут очевидными после прочтения следующего описания и соответствующих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ& lsqb; 0024 & rsqb; В целях иллюстрации изобретения на чертежах показана форма, которая в настоящее время является предпочтительной, однако следует понимать, что изобретение не ограничивается точными устройствами и средствами, показанными на чертежах:
& lsqb; 0025 & rsqb; ИНЖИР.1 — вид сбоку с вырезом инструмента для установки анкера и анкера в соответствии с изобретением;
& lsqb; 0026 & rsqb; ИНЖИР. 2 — увеличенный вид сбоку с разрезом дальнего конца инструмента и анкера, показанных на фиг. 1; и
& lsqb; 0027 & rsqb; ИНЖИР. 3 — вид сбоку с разрезом инструмента и анкера, показанных на фиг. 2 показан в развернутом положении.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ& lsqb; 0028 & rsqb; На фиг. 1 показан один предпочтительный вариант выполнения монтажного инструмента и анкерного узла.Якорь 1 прикреплен к дальнему концу 2 необязательно одноразового вставного инструмента 10. Инструмент 10 не обязательно должен быть одноразовым, и его можно использовать повторно. Подвижный элемент рукоятки или спусковой крючок 3 соединен с толкателем 4, который, в свою очередь, разъемно соединен с анкером 1. Толкатель 4 размещен в элементе оболочки или в полой штанге 6. Рукоятка 7 для пальца предназначена для хирурга. Палец. Ручка 3 прижимается к захвату 7, чтобы вызвать срабатывание анкера 1. Якорь 1 заправлен нитью 5, которая помещается в паз вала 6.В этом варианте осуществления анкер 1 готов к развертыванию путем вставки в целом выровненного в осевом направлении анкера 1 в предварительно просверленное отверстие для кости. Как показано, анкер нужно только «в целом» выровнять с валом 6. Фактически, он может быть расположен под острым углом к валу 6, при условии, что он находится по существу в пределах внутреннего диаметра вала 6 при вставке в ткань. Как показано, анкер частично удерживается внутри полого вала 6 до его фиксации в ткани.
& lsqb; 0029 & rsqb; На фиг.2 и 3 показаны увеличенный вид сбоку анкера 1 и дальнего конца 2 вставного инструмента. ИНЖИР. 2 показан фиксатор 1 в том виде, в каком он может быть расположен внутри дистального конца 2 инструмента для введения до введения в предварительно просверленное отверстие в кости. Якорь 1, по меньшей мере, частично содержится в дальнем конце 2 установочного инструмента и съемно соединен с толкателем 13. Задний конец якоря 1 расположен между внутренней стенкой элемента 6 оболочки и дальним концом Пружинный рычаг 14.Дистальный конец пружинного рычага 14 смещен наружу, но ограничен элементами 15. На фиг. 3 показан анкер 1 во время процесса развертывания (до приложения вращающей силы, но находясь в предварительно просверленном отверстии для кости), полностью обнаженный с дистального конца 2 установочного инструмента. Перемещая толкатель 13 достаточно далеко в дистальном направлении, чтобы обнажить задний конец якоря 1 и передний конец пружинного рычага 14 (перемещая ручку 3 по направлению к ручке 7 для пальца), якорь 1 размещается вдали от почти осевого совмещения, чтобы более перпендикулярное положение.Проксимальный конец пружинного рычага или пластинчатой пружины 14 удерживается под нагрузкой ограничительными элементами 15, поэтому дальний конец пружинного рычага 14 может оказывать достаточное усилие на задний конец анкера 1 для начала развертывания. Как только наконечники анкера 16 прижимаются к внутренним стенкам предварительно просверленного отверстия в кости (показано пунктирными линиями 20), приложение вращающей силы к инструменту инициирует процесс развертывания. Анкер имеет режущие кромки 18, расположенные на противоположных сторонах, как также показано, например, в U.С. Пат. № 6,102,934, для врезания в стенки ствола скважины, когда инструмент и, следовательно, якорь вращаются. Вращение заставляет якорь ввинчиваться в скважину. Пружинный рычаг 14 передает смещающее усилие на якорь 1, заставляя якорь первоначально зацепляться за стенку ствола скважины, когда пружина расширяется, перемещаясь за пределы вала 6, из-за скользящего движения элемента 4, действующего на толкающий элемент 13.
& lsqb; 0030 & rsqb; При использовании хирург вставляет анкер в отверстие в биологической ткани, т.е.г. кость. Элемент 3 прижимается к захвату 7, в результате чего анкер 1 выходит из оболочки дистально. Пружина 14 смещает якорь, заставляя его поворачиваться вокруг оси А в зацепление с отверстиями. Вращением инструмента 10 якорь ввинчивается в скважину. После закрепления анкера инструмент извлекается, оставляя анкер и все прикрепленные нити закрепленными в стволе скважины. Якорь предпочтительно не прикреплен к дальнему концу 6 инструмента, поэтому инструмент освобождает якорь, когда он извлекается проксимально.В качестве альтернативы якорь может удерживаться инструментом с использованием хрупкого или разъединяемого (быстроразъемного) соединения, как будет понятно специалистам в данной области техники.
& lsqb; 0031 & rsqb; Якорь может иметь форму круглого диска, овала, почки, заостренного, многоугольного, иметь любую симметричную или асимметричную геометрическую конфигурацию, или состоять из цельного, или иметь оконные проемы. Также анкер может быть двухмерным или трехмерным. Якорь можно прикрепить к шайбе, кнопке или любому гибкому элементу.
& lsqb; 0032 & rsqb; Кроме того, анкер может быть изготовлен из металла, полимера, биоабсорбируемого материала, кости или любого другого биосовместимого материала или их комбинации.
& lsqb; 0033 & rsqb; Чтобы вставить анкер, может потребоваться предварительное просверливание отверстия в кости, а может и не потребоваться, в зависимости от остроты передней точки анкера или наличия режущих поверхностей (например, резьбы) на анкере или анкере. инструмент для вставки.
& lsqb; 0034 & rsqb; Инструмент для введения может быть выполнен в виде одноразового, одноразового или многоразового инструмента.Кроме того, инструмент для введения может быть разработан для открытой или минимально инвазивной хирургии. Активирующий элемент для инициирования смещения якоря наружу, показанный как пружинный рычаг 14 в описанном варианте осуществления, может быть пружиной другого типа, рычагом, стержнем или любым другим подходящим конструктивным элементом. Рядом с дистальным концом инструмента для введения может быть упор 22 для плеча, чтобы указывать максимальную глубину введения анкера в биологическую ткань для более точного и надежного зацепления анкера в ткани.
& lsqb; 0035 & rsqb; Преимущество изобретения состоит в том, что, поскольку по меньшей мере часть анкера находится внутри дистального конца инструмента для введения, анкер лучше подходит для артроскопического использования.Анкер будет защищен таким образом, чтобы его можно было пропустить через такие препятствия, как лоскут в канюле или несколько слоев мягких тканей.
& lsqb; 0036 & rsqb; Другое преимущество состоит в том, что для имплантации анкера требуется только небольшое отверстие для введения (в виде предварительно просверленного отверстия в кости), что сводит к минимуму травму биологической ткани и повышает способность фиксации анкера.
& lsqb; 0037 & rsqb; Еще одним преимуществом сборки фиксатора и вставного инструмента является простота и удобство одноразового устройства.Кроме того, вращение наклонной режущей кромки (якорь роторного лезвия) позволяет хирургу иметь тактильную обратную связь при зацеплении анкера с отверстием в кости, как это было бы при установке винтового анкера в кость.
& lsqb; 0038 & rsqb; Оболочка 6, а также толкатель 4 могут быть жесткими или иметь некоторую степень гибкости, позволяющую их изгибать, как требуется, например, для артроскопического использования.
& lsqb; 0039 & rsqb; Хотя были раскрыты предпочтительные варианты осуществления изобретения, предполагается, что различные способы реализации принципов, раскрытых в данном документе, находятся в пределах объема следующей формулы изобретения.Следовательно, понятно, что объем изобретения не должен быть ограничен, за исключением случаев, указанных в формуле изобретения.
Как снять роторы с автомобилей
Денег мало, бензин стоит дорого, и вам необходимо заменить тормозные диски на ваших автомобилях. Вам понадобятся некоторые инструменты и некоторые технические ноу-хау, но замена или снятие роторов с транспортных средств — не слишком сложный проект. Вы можете сэкономить около часа труда с каждой стороны, так как местная ремонтная мастерская взимает с вас плату за снятие ротора, сделав это самостоятельно.Это быстро складывается, и чем чаще вы выполняете такой ремонт, тем быстрее и эффективнее вы становитесь. Транспортное средство. и втулку обильно и дайте ему впитаться от 30 минут до часа, в зависимости от того, насколько сильно образовалась ржавчина.
Наденьте защитные очки и ударьте по шляпке ротора (центральная часть, через которую проходят шпильки колеса) глухим молотком в верхней части.Поверните ротор на 90 градусов и снова ударьте им сверху. Повторяйте это до тех пор, пока ротор не освободится или вы не ударите по нему 12 или более раз. Если он по-прежнему не откручивается, переходите к этапу 3.
Вставьте болт в отверстие в кронштейне тормозного суппорта, которое находится непосредственно за ротором. Затяните болт, пока он не коснется поверхности ротора, а затем затяните его до упора торцевым ключом.
Ударьте молотком по поверхности ротора. Ослабьте болт, поверните ротор на 90 градусов и снова затяните болт до упора.Снова ударьте по ротору ударным молотком. Продолжайте повторять это, пока ротор не освободится, что не должно потребовать больше двух или трех ударов, если он еще не освободился.
Вещи, которые вам понадобятся
Проникающее масло
Защитные очки
Ударный молоток
Болт
Набор головок
Как снять роторы с Pontiac Grand Prix
Припаркуйте Pontiac Grand Prix на плоской, ровной асфальтированной или бетонной поверхности.Включите стояночный тормоз и отпустите защелку капота.
Установите противооткатный упор позади или перед шиной на противоположной стороне оси, которую вы собираетесь поднять. Если вы поднимаете переднюю ось, поместите клин позади одной задней шины. Если вы поднимаете заднюю ось, поместите клин перед одним передним колесом.
Откройте капот и слейте половину тормозной жидкости из главного цилиндра с помощью насадки для индейки. Замените пока колпачок.
Открутите гайки крепления шин, которые вы снимаете.Не ослабляйте их слишком сильно и не снимайте.
Поднимите автомобиль с помощью напольного домкрата и закрепите автомобиль на подставке. Если вам нужно, поднимайте обе стороны одновременно или вы можете поднимать только одну сторону за раз.
Снимите проушины и снимите колесо.
Снимите болты суппорта с помощью храповика и торца. Подденьте суппорт большой отверткой и сожмите поршень суппорта с помощью С-образного зажима. Закрепите суппорт на раме или винтовой пружине с помощью эластичного троса.Не позволяйте суппорту висеть за тормозной шланг.
Снимите колодки с анкера суппорта, отметив, как они установлены. Вы захотите заменить их так же, как они были сняты с якоря.
Снимите анкерные болты суппорта с помощью трещотки и головки. Если это облегчает задачу, сначала ослабьте болты с помощью тормозной планки и гнезда, а затем переключитесь на храповой механизм, чтобы ускорить процесс.
Снимите ротор.Он должен соскочить со ступицы, но в некоторых случаях ротор может ржаветь до ступицы, и его необходимо будет убедить в необходимости удалить. Если вы заменяете ротор на новый, ударьте старый ротор молотком по ребру, чтобы оторвать его от ступицы. Если вы собираетесь повторно использовать один и тот же ротор, вам придется проявить большую осторожность, чтобы снять ротор, не повредив его. Используйте тот же метод, но используйте тяжелый резиновый молоток. Это потребует гораздо большего упорства, чем стальной молоток, но настойчивость окупится.
Предметы, которые вам понадобятся
Подъемный домкрат Стойка (и) Противооткатный упор для колеса Тормозная жидкость, одобренная Министерством транспорта Турции Тормозная жидкость с приводом 1/2 дюйма, набор головок с приводом 1/2 дюйма, трещотка с храповым механизмом 1/2 дюйма Большая отвертка с прямым концом Банджи-шнур Молоток или тяжелый резиновый молоток C-образный зажим Спрей для очистки тормозов (если вы заменяете роторы на новые) Магазинная тряпка (и) Регулируемый динамометрический ключ (рекомендуется)
Как снять роторы на Hyundai Accent
Откройте капот Hyundai Accent и удалите половину жидкости из бачка главного цилиндра с помощью насадки для индейки.Слейте старую жидкость и надежно установите крышку главного цилиндра. Поместите противооткатный башмак за одну заднюю шину.
Ослабьте зажимные гайки обеих передних шин с помощью тормозного бруса и 21-миллиметрового торца.
Поднимите переднюю часть автомобиля с помощью напольного домкрата и поместите опоры домкрата под направляющими передней рамы, чтобы поддержать автомобиль. Снимите гайки и колеса.
Снимите два болта суппорта с помощью трещотки и торца. Подвесьте суппорт к цилиндрической пружине с помощью эластичного троса, затем сожмите поршень суппорта внутрь с помощью С-образного зажима.
Снимите тормозные колодки с анкера суппорта, но определите, какая колодка является внешней, а какая внутренняя, а также верх и низ каждой колодки, когда она находится в анкере. Вы захотите заменить колодки таким же образом, как они были сняты, если вы их не заменяете.
Снимите два анкерных болта суппорта с помощью трещотки и торца. Они будут очень тугими, и для их удаления потребуется немного силы. Снимите анкер суппорта.
Удалите винт, расположенный на центральной ступице ротора, используя ударную отвертку (установленную в обратном направлении), головку Phillips и молоток.Ударяйте ударной отверткой по головке, пока винт не ослабнет.
Снимите ротор с помощью двух болтов 8 на 1,25 мм и вверните их в отверстия ступицы на лицевой стороне ротора. Ввинтите их и затяните 3-4 раза с помощью трещотки и торца. Затем переходите к следующему болту. Продолжайте перемещаться между двумя болтами. Если резьба оборвется, с силой ударьте по ротору резиновым молотком до тех пор, пока он не выйдет из ступицы.
Если вы снимаете ротор, чтобы заменить его, ударьте по нему обычным молотком и пропустите первые два варианта.Будет проще и намного быстрее.
По завершении замените детали в обратном порядке.
Затяните стопорные гайки на шинах после того, как вы опустите Accent, установив динамометрический ключ на 80 фунт-футов. и 21-миллиметровая розетка.
Прокачивайте педаль тормоза до тех пор, пока она не станет нормальной, чтобы восстановить гидравлическое давление обратно в сжатые поршни суппорта. После этого проверьте и долейте новую тормозную жидкость DOT 3 в бачок главного цилиндра. Не забудьте снять противооткатный башмак.
Предметы, которые вам понадобятся
Домкрат
2 стойки домкрата
Противооткатный упор
Turkey baster
Тормозная жидкость DOT 3
1- -дюймовая тормозная жидкость
- стержень
Набор метрических головок 1/2 дюйма (до 21 миллиметра)
Трещотка 1/2 дюйма
Регулируемый динамометрический ключ 1/2 дюйма
Отвертка с плоской головкой
Ударная отвертка с крестообразным шлицем
Молоток
(2) 8 мм (ширина) на 1.Болты с шагом 25 мм (или)
Резиновый молоток 3 фунта
Банджи-шнур
C-образный зажим
Как снять роторы на Suzuki Forenza
2007 года выпуска ваш аварийный тормоз. Ослабьте гайки крепления Forenza на двух передних шинах с помощью гаечного ключа.Поднимите переднюю часть Forenza и поместите домкраты под раму, чтобы поддерживать автомобиль во время работы.
Откройте капот и снимите крышку бачка главного тормозного цилиндра.Главный цилиндр и бак расположены со стороны водителя двигателя внутри моторного отсека.
Найдите крепежные болты суппорта внутри тормозных суппортов. Удалите их с помощью набора розеток. Если вы не можете приобрести его вместе с набором розеток, наденьте прерыватель на храповик, чтобы усилить усилие. Отбойный стержень — это полая труба, которая используется для усиления рычага при снятии затянутых гаек или болтов.
Потяните суппорт тормоза вверх и снимите его с колеса и ротора.Подвесьте его к раме с помощью эластичного троса, чтобы предотвратить повреждение или разрыв тормозной магистрали.
Потяните ротор на себя, пока он не выскользнет. Вы можете использовать резиновый молоток, чтобы слегка постучать по нему, если необходимо ослабить его.
Вещи, которые вам понадобятся
Гаечный ключ
Домкрат
Подставки для домкратов
Набор головок
Отбойник
Роторы для Elite
поставьте автомобиль на ровную площадку и выключите зажигание.Откройте и закрепите капот Elantra. Ослабьте зажимные гайки на переднем колесе, на котором должен быть заменен ротор, с помощью утюга для шин. Поверните гайки против часовой стрелки.Разместите домкрат под рамой прямо за колесом. Поднимите Elantra с помощью домкрата до тех пор, пока не сможете разместить под рамой подставку для домкрата. Опустите Elantra с домкратом на подставку.
Отверните зажимные гайки с колеса и снимите колесо со ступицы колеса.
Найдите два болта на задней стороне тормозного суппорта.Суппорт закреплен на верхней части ротора и удерживает тормозные колодки. Снимите болты с помощью торцевого ключа и трещотки и снимите суппорт с ротора.
Проденьте проволочную стяжку через вентиляционное отверстие в верхней части суппорта и подвесьте суппорт на катушке стойки Elantra, чтобы суппорт не висел на резиновой тормозной магистрали.
Подденьте серебряный колпачок со ступицы колеса, расположенный в центре ротора, чтобы открыть ступицу, используя небольшую отвертку с плоской головкой.
Снимите болт, расположенный в центре ступицы, используя торцевой ключ и трещотку.
Снимите ротор со ступицы колеса.
Вещи, которые вам понадобятся
Шина утюг
Домкрат
Подставка для домкрата
Набор торцевых головок
Хомут для проволоки
514 Винт с плоской головкой Комплект ротора от Teraflex- Прекращение деятельности
- Ротор, вращающийся по часовой стрелке или против часовой стрелки
- Двух- или трехплечий ротор, вращающийся по или против часовой стрелки
Когда дело доходит до модернизации Jeep, тормоза часто оказываются в самом низком списке приоритетов.После обновления колес и установки более крупных 35-дюймовых шин вашим стандартным тормозам будет очень сложно останавливать автомобиль, как на дороге, так и особенно при преодолении препятствия на бездорожье. Когда вы увеличиваете размер и вес шин, вам действительно стоит подумать об обновлении тормозов. Это повысит вашу уверенность во время вождения и поможет избежать столкновения или аварии. Новые модернизированные тормоза стоят недешево, однако знание того, что ваша тормозная мощность увеличена, а тормозной путь сокращен, определенно стоит вложенных средств.
Когда дело доходит до тормозных комплектов на вторичном рынке, есть несколько вариантов, которые включают новые роторы, анкерные кронштейны, суппорты и тормозные колодки. Наиболее популярными вариантами являются тормозные комплекты Teraflex, тормозные комплекты Crown Automotive, тормозные комплекты Power Stop и тормозные комплекты Dynatrac. Вы можете найти только комплекты с роторами и кронштейнами или комплекты с роторами, кронштейнами и суппортами. Иногда в комплект входят новые тормозные колодки, или вы можете приобрести тормозные колодки любимой марки отдельно. Что касается роторов, вы можете найти комплекты со стандартными вентилируемыми роторами, роторами с прорезями или роторами с отверстиями и прорезями.Ваше решение зависит от ваших предпочтений, условий вождения и, конечно же, вашего бюджета.
После долгих поисков в Интернете я решил выбрать Teraflex Performance Big Rotor Kit как для передних, так и для задних колес. Я выбрал стандартные вентилируемые роторы (я считаю, что гладкая поверхность ротора — лучший вариант для комбинации ежедневного вождения и бездорожья в выходные дни, обычные роторы обеспечивают максимальную массу, что улучшает охлаждение, и без щелей мне не нужно беспокоиться о скоплении грязи и преждевременное повреждение тормозных колодок), с включенными более крупными анкерными кронштейнами, которые позволяют использовать стандартные суппорты и тормозные колодки.Прочитав обзоры на Teraflex Big Brake Kit, я решил, что не хочу переходить на двухпоршневой суппорт и влиять на ощущение педали тормоза, а также, возможно, заменять главный цилиндр.
Комплект большого ротора TeraFlex JK / JKU Front Performance включает в себя более крупные роторы 13,3 ″ (338 мм) для улучшения тормозных характеристик — приклад 11,9 ″ (302 мм) и больший тормозной суппорт, перемещающий анкерные кронштейны. В нем сохранились заводские тормозные суппорты и тормозные колодки. Комплект заднего большого ротора включает в себя 13 большего размера.5 ″ (343 мм) механически обработанные роторы и больший тормозной суппорт, перемещающий анкерные кронштейны, а также удерживающие заводские тормозные суппорты и колодки.
При установке комплекта большого ротора нет необходимости отсоединять суппорты от тормозных магистралей, поэтому вам не нужно прокачивать тормоза, если вы этого не хотите.
Этот комплект работает довольно умно. Смещение суппорта немного наружу позволяет разместить ротор большего диаметра, что обеспечивает более эффективное рассеивание тепла и лучшее механическое преимущество при остановке.Увеличенное расстояние зажима от центра ротора приводит к большему тормозному рычагу, что позволяет уменьшить тормозной путь. Однако стоит отметить, что ни усилие зажима суппорта, ни площадь контакта колодки с ротором не увеличиваются (как в случае полного комплекта Big Brake Kit).
Следует помнить, что для этого комплекта большого ротора Jeep JK от Teraflex требуются колеса диаметром не менее 17 дюймов.
Заявление об ограничении ответственности : Как я всегда упоминал, я не профессиональный механик, я просто стараюсь как можно больше поработать на своем Jeep.Это помогает мне больше узнать о моем автомобиле и сэкономить деньги, которые можно потратить на запчасти и обновления.
Я не несу ответственности за любые травмы или поломки, которые могут произойти, если вы решите выполнить эти действия. Вы должны решить, комфортно ли вам работать на своем джипе. Если нет, попросите профессионала завершить этот проект за вас.
Как партнер Amazon я получаю комиссию от соответствующих покупок. Это позволяет мне предлагать содержимое этого веб-сайта бесплатно каждому.
Необходимые детали и инструменты:
1. Комплект большого ротора TeraFlex JK с передними характеристиками и комплект большого ротора TeraFlex JK с задними характеристиками
2. Тормозные колодки передние — JK и тормозные колодки задние — JK / или любой другой марки по вашему выбору
3. Комплект оборудования для дискового тормоза или в местном магазине автозапчастей
4. Монтировка и / или С-образный зажим
5. Комбинированный ключ на 13 и 15 мм
6. Динамометрический ключ и / или прерыватель
7.Головки 13мм, 18мм и 21мм
8. Тормозная смазка и очиститель тормозов
9. Проволочная щетка
10. Фиксатор резьбы Loctite Blue
Порядок действий:
Шаг 1:
Подготовьте свои инструменты и подготовьте все, прежде чем начинать проект.
Шаг 2:
Припаркуйтесь на ровной поверхности и поставьте под задние колеса колодки.
Шаг 3:
Поднимите переднюю ось и поставьте ее как минимум на две опоры домкрата.Снимите оба колеса. Поверните рулевое колесо в сторону, чтобы получить лучший доступ к болтам суппорта и кронштейна.
Шаг 4:
Очистите главный цилиндр тормозной жидкости снаружи. Снимите колпачок и положите в надежное место.
Шаг 5:
Поместите монтировку или большую отвертку между внешней стенкой суппорта и внешней тормозной колодкой. Используйте монтировку, чтобы осторожно протолкнуть поршень обратно в отверстие как можно глубже (крышка главного цилиндра была снята, чтобы сбросить давление, поскольку теперь вы проталкиваете тормозную жидкость обратно вверх по трубопроводам).
Шаг 6:
Снимите болт верхнего суппорта с помощью ключа или торца на 13 мм или 1/2 дюйма. Удерживайте направляющий / скользящий стержень тонким ключом на 15 мм, чтобы он не вращался.
Шаг 7:
Освободите трос АБС от кронштейна, чтобы он немного провисал.
Шаг 8:
Вы можете использовать большой С-образный зажим и одну из старых тормозных колодок, чтобы полностью задвинуть поршень (это дополнительное пространство понадобится для установки новых тормозных колодок).
ПРИМЕЧАНИЕ: вам нужно будет несколько раз нажать педаль тормоза, чтобы плотно прижать поршень суппорта к тормозным колодкам после завершения этого проекта и ПЕРЕД тем, как вы начнете водить джип!)
Шаг 9:
Выверните болт нижнего суппорта. Надежно подвесьте суппорт с помощью металлической проволочной подвески или эластичного троса. Очистите и немного смажьте край поршня.
Шаг 10:
Удалите два болта кронштейна с помощью торцевого ключа на 21 мм или 13/16 ″.
Шаг 11:
Вид бок о бок стокового переднего анкерного кронштейна и нового, большего анкерного кронштейна Teraflex.
Шаг 12:
Вы можете повторно использовать стандартное тормозное оборудование, однако я бы порекомендовал приобрести новый комплект оборудования, в который входят все необходимые резиновые сапоги и зажимы (по одному комплекту на ось). Установите зажимы против дребезжания в новый кронштейн, обращая особое внимание на их ориентацию. Нанесите немного смазки в отверстия для штифтов ползунка, очистите штифты ползунков, а также смажьте их.Установите резиновые сапоги и убедитесь, что они правильно сидят. Вставьте направляющие / штифты в отверстия и убедитесь, что они свободно перемещаются вперед и назад. Слегка смажьте поверхность зажимов против дребезжания.
Шаг 13:
Собрать кронштейн на скамейке или столе намного проще, чем на колесе. Также немного смажьте ушки тормозных колодок, чтобы облегчить их скольжение внутри зажимов. Убедитесь, что на одной из тормозных колодок каждого кронштейна есть металлический язычок — индикатор износа.
Шаг 14:
Снимите старый тормозной ротор. Очистите колесо от ржавчины / окисления металлической щеткой.
Шаг 15:
Установите новый тормозной ротор. Временно закрепите его на месте одной из гаек.
Шаг 16:
Установите новый кронштейн с тормозными колодками. Убедитесь, что смазка не попала на поверхность тормозного ротора. Поместите синий фиксатор резьбы на болты кронштейна, сначала затяните вручную и затяните болты с моментом 110 фунт-сила-футов.
Установите стандартный суппорт на место. Затяните болты суппорта с усилием 26 фунт-футов. Закрепите трос АБС обратно в кронштейн.
После обработки обеих сторон оси наденьте колеса на место и снова опустите Jeep на землю.
Закройте крышку главного цилиндра.
Садитесь в свой джип и при выключенном двигателе несколько раз нажмите педаль тормоза , чтобы плотно прижать поршень суппорта к тормозным колодкам, пока вы снова не почувствуете, что педаль снова затвердевает.
Запустите Jeep и начните процедуру приработки новых передних тормозных колодок и роторов.Для этой процедуры вам понадобится хороший участок дороги и отсутствие движения. Все тормозные колодки должны прилегать к ротору, с которым они будут использоваться, чтобы максимизировать эффективность торможения. Процесс приработки включает постепенное нагревание роторов и прокладки. В результате этого процесса на поверхность ротора будет нанесен тонкий слой переводной пленки. Выполнение процедур приработки, предусмотренных производителем, обеспечит гладкий, ровный слой переводной пленки на роторе и минимизирует дрожание тормоза.
Мой комплект Teraflex Big Rotor Kit поставляется с новыми тормозными колодками Hawk. Вот процедура приработки, рекомендованная Hawk:
После установки новых колодок сделайте от 6 до 10 остановок на скорости примерно от 35 до 5 миль в час при умеренном давлении. Сделайте еще две-три резких остановки на скорости примерно от 45 до 10 миль в час. Не позволять транспортному средству полностью останавливаться . По завершении этого процесса проехать несколько минут, а затем припаркуйте автомобиль и дайте тормозам полностью остыть, прежде чем снова поехать на них.Не включайте стояночный тормоз, пока не завершится процесс охлаждения.
Если передние тормоза работают правильно, теперь вы можете работать с задними колесами.
Шаг 17:
Поставьте клинья под передние колеса. Убедитесь, что аварийный тормоз НЕ включен.
Шаг 18:
Поднимите задний мост и поставьте его как минимум на две опоры домкрата. Снимите оба колеса. Снимите крышку главного цилиндра тормозной жидкости и положите ее в безопасное место.
Шаг 19:
Снова используйте монтировку, чтобы осторожно протолкнуть поршень суппорта обратно в отверстие как можно глубже. Снимите оба болта суппорта с помощью гаечного ключа на 13 мм или 1/2 дюйма или торцевого ключа. Удерживайте направляющие / скользящие пальцы тонким ключом на 15 мм, чтобы они не вращались. Надежно подвесьте суппорт с помощью металлической проволочной подвески или эластичного троса. Очистите и немного смажьте край поршня.
Шаг 20:
Снимите два болта кронштейна с помощью торцевого ключа на 18 мм.
Шаг 21:
Вид сбоку заднего анкерного кронштейна приклада и нового анкерного кронштейна Teraflex большего размера.
Шаг 22:
Установите защелки против дребезжания в новый кронштейн, обращая особое внимание на их ориентацию. Нанесите немного смазки в отверстия для штифтов ползунка, очистите штифты ползунков, а также смажьте их. Установите резиновые сапоги и убедитесь, что они правильно сидят. Вставьте направляющие / штифты в отверстия и убедитесь, что они свободно перемещаются вперед и назад.Слегка смажьте поверхность зажимов против дребезжания.
Установите новые тормозные колодки в кронштейн. Также немного смажьте ушки тормозных колодок, чтобы облегчить их скольжение внутри зажимов.
Шаг 23:
Опять же, убедитесь, что электронный тормоз НЕ установлен на . Снимите старый тормозной ротор.
Шаг 24:
Очистите колесо от ржавчины / окисления металлической щеткой.
Шаг 25:
Установите новый тормозной ротор.Временно закрепите его на месте одной из гаек.
Шаг 26:
Установите новый кронштейн с тормозными колодками. Убедитесь, что смазка не попала на поверхность тормозного ротора (при необходимости очистите ее очистителем для тормозов). Поместите синий резьбовой фиксатор на болты кронштейна, сначала затяните вручную и затяните болты с моментом 55 фут-фунт.
Установите стандартный суппорт на место. Затяните болты суппорта с усилием 26 фунт-футов.
После обработки обеих сторон оси наденьте колеса на место и снова опустите Jeep на землю.
Закройте крышку главного цилиндра.
Запрыгните в свой джип и при выключенном двигателе несколько раз нажмите педаль тормоза , чтобы плотно прижать поршень суппорта к тормозным колодкам, пока вы снова не почувствуете, что педаль снова твердо встала.
Запустите Jeep и начните процедуру приработки новых задних тормозных колодок и роторов. Порядок действий такой же, как и с передними тормозами.
После того, как вы закончите процесс приработки и дадите тормозам остыть, когда вы снова начнете движение, вы должны немедленно заметить улучшение во время торможения, особенно если вы замените тормоза на обеих осях.Примерно через 100 миль вы можете проверить все болты, чтобы убедиться, что все затянуто настолько плотно, насколько это необходимо.
Если у вас есть какие-либо вопросы или предложения, не стесняйтесь комментировать ниже.
Динамическое закрепление отдаленных источников аритмии фиброзными областями посредством реструктуризации паттерна активации
Динамическое закрепление дальнего ротора в 2D модели сердечной ткани
Фиброзные рубцы не только фиксируют роторы, но и могут динамически фиксировать их с большого расстояния.В первых экспериментах мы изучали динамику спиральной волны с фиброзным рубцом и без него в общем исследовании. Диаметр фиброзной области составлял 6,4 см, исходя из аналогичного размера рубцов у пациентов с задокументированной и индуцированной ЖТ (см. Раздел «Методы», Магнитно-резонансная томография). Процент фиброза изменялся линейно от 50% в центре рубца до 0% на границе рубца. Мы запустили ротор на расстоянии 15,5 см от рубца (рис. 1, панель A), который имел период 222 мс, и изучили его динамику.
Рис. 1. Динамическое закрепление удаленного ротора на фиброзной области в 2D-модели.
Невозбудимая фиброзная ткань показана оранжевым цветом, а трансмембранное напряжение показано оттенками серого.
Фибротический рубец:
A: Ротор был запущен на расстоянии 15,5 см от границы фиброзной области.
B: Волновой фронт начинает разрушаться на рубцовой области, образуя вторичные источники.
C-D: Вторичные источники начали распространяться по направлению к исходному ротору.
D: Вторичные источники тянутся к начальному ротору.
E: Один вторичный источник объединится с начальным ротором, см. Белый кружок.
F: Вторичный источник слился с исходным ротором, в левой части ткани ротора больше нет.
G: Главный ротор теперь обозначен белым кружком, процесс уничтожения ротора начинается снова.
H-I: Аннигиляция нового ротора снова приводит к тому, что доминирующий ротор находится ближе к рубцу.
J-K: Доминирующий ротор снова сливается с вторичным источником (белый кружок), что приводит к реструктуризации модели активации.
L: ротор теперь прикреплен к рубцу.
Без рубца
A: Слева от ткани был запущен ротор.
B-C: Эти роторы остаются стабильными в течение 20 секунд моделирования.
Некротический рубец A: ротор был инициирован слева от ткани, или на расстоянии 15,5 см от границы некротического рубца.
B-C: Эти роторы остаются стабильными в течение 20 секунд моделирования.
https://doi.org/10.1371/journal.pcbi.1006637.g001
Во-первых, через несколько секунд паттерн активации стал менее регулярным, и в фиброзной области появилось несколько вторичных волновых разрывов (рис. 1, панель B). Эти неровности начали распространяться к кончику исходного ротора (рис. 1, панель C-D), создавая сложную картину активации между рубцом и исходным ротором.Затем один из вторичных источников достиг вершины исходного ротора (рис. 1, панель E). Затем этот вторичный источник слился с исходным ротором (рис. 1, панель F), что привело к замедлению схемы активации и стимулировало цепную реакцию аннигиляции всех вторичных прерываний волны в окрестности исходного ротора. В этот момент при моделировании доминировал вторичный источник, расположенный ближе к рубцу (рис. 1, панель G). Теперь весь процесс начался снова (Рис. 1, панели H-K), пока, наконец, только один источник не стал основным источником, прикрепленным к рубцу (Рис. 1L) с периодом вращения 307 мс.Для наглядности фильм этого процесса представлен как дополнительный фильм S1.
Обратите внимание, что этот процесс происходит только при наличии рубца с окружающей фиброзной зоной. В моделировании, озаглавленной «Без рубца» на рис. 1, мы показываем контрольный эксперимент, когда для ткани без рубца использовались те же начальные условия. На панели, озаглавленной «Некротический рубец» на рис. 1, показано моделирование только компактной области без окружающей фиброзной ткани. В обоих случаях ротор был устойчивым и находился в исходном положении в течение всего периода моделирования.Важное отличие здесь от процессов, показанных на рис. 1 (фибротический рубец), заключается в том, что в случаях «нет рубца» и «некротического рубца» не происходит новых разломов волн, и, таким образом, у нас нет сложного динамического процесса перестройки возбуждения. узоры. Мы называем этот сложный динамический процесс, приводящий к закреплению удаленного ротора, динамическим закреплением. Хотя этот процесс содержит этап сложного поведения, в целом он чрезвычайно надежен и воспроизводим в очень широком диапазоне условий.Во второй серии моделирования исходный ротор был размещен на разных расстояниях от границы рубца, в диапазоне от 1,8 до 14,3 см, чтобы определить возможные результаты, см. Рис. 2. Здесь, в дополнение к одному закрепленному ротору, показанному на рис. 1H. мы также могли получить другие конечные результаты динамического закрепления: мы получили роторы, вращающиеся в противоположном направлении (рис. 2A, вверху), роторы с двойным захватом, закрепленные на якоре, у которых было 2 волновых фронта, вращающихся вокруг фиброзных областей (рис. 2A, в середине), или аннигиляция роторов. (Рис. 2A, внизу, где нет волны вокруг рубца), которое обычно возникает в результате аннигиляции повторяющегося рисунка в форме восьмерки.Подводя итог, мы получили следующие возможные результаты:
Рис. 2.
Панель A: Типы результирующих паттернов активации: (1) ротор, вращающийся в направлении, противоположном исходному ротору, (2) двуплечий ротор и (3) прекращение активности. Панель B: Тип результирующего паттерна активации в зависимости от расстояния между ротором и границей рубца.Красный цвет указывает: результирующий образец активации представляет собой ротор, вращающийся либо в том же направлении, что и исходный ротор, либо в противоположном направлении. Зеленый цвет означает: результирующий образец активации представляет собой ротор с двумя или тремя лопастями. Синий указывает: электрическая активность исчезает после динамической перестройки паттерна активации.
https://doi.org/10.1371/journal.pcbi.1006637.g002
На рис. 2, панель B представлена относительная вероятность возникновения упомянутых паттернов активации в зависимости от расстояния между ротором и границей рубца.Мы действительно видим, что для меньших начальных расстояний результирующая картина активации всегда представляет собой один ротор, вращающийся в одном направлении. С увеличением расстояния возможны другие схемы крепления. Если расстояние было больше, чем примерно 9 см, есть как минимум 50% шанс получить либо многорукавный ротор, либо прекращение активности. Также отметим, что такое динамическое закрепление происходило с огромных расстояний: мы изучали роторы, расположенные на расстоянии до 14 см от рубца. Однако мы заметили, что даже на очень больших расстояниях, таких как 25 см или более, такое динамическое закрепление (или прекращение паттерна активации) всегда возможно, при условии, что было предоставлено достаточно времени.
Мы измерили время, необходимое для фиксации роторов, в зависимости от расстояния до рубца. Для каждого расстояния мы выполнили около 60 вычислений с использованием различных начальных значений генератора случайных чисел, как с учетом ионного ремоделирования, так и без него. Результаты этого моделирования показаны на рис. 3. Мы видим, что время, необходимое для динамического закрепления, линейно зависит от расстояния между границей рубца и начальным ротором. Синие и желтые линии соответствуют модели рубца с ионным ремоделированием и без него, соответственно (ионное ремоделирование моделировалось уменьшением проводимости I Na , I Kr и I Ks , как объяснено в разделе «Методы»).Мы интерпретируем эти результаты следующим образом; Время закрепления в основном определяется распространением хаотического режима к сердцевине исходного ротора, и этот процесс имеет четкую линейную зависимость. Для удаленных роторов распространение этого хаотического режима в основном происходит за пределами области ионного ремоделирования, и, таким образом, обе кривые на рис. 3 имеют одинаковый наклон. Однако при ионном ремоделировании APD в области рубца продлевается. Это создает неоднородность и, как следствие, образуются примерно 3 начальных разрыва в области рубца.На 5 секунд раньше в модели рубца с ремоделированием по сравнению с моделью рубца без ремоделирования.
Рис. 3. Скрипичный график зависимости времени, необходимого для закрепления или остановки ротора, от начального расстояния между кончиком ротора и границей фиброзной области в 2D-модели.
Желтый цвет указывает на модель фиброза, в которой учитывается ионное ремоделирование, а синий указывает, что фиброз моделируется только путем введения небольших непреодолимых препятствий.
https: // doi.org / 10.1371 / journal.pcbi.1006637.g003
Чтобы определить некоторые свойства субстрата, необходимые для динамического закрепления, мы варьировали размер и уровень фиброза внутри рубца и исследовали, присутствует ли динамическое закрепление. Из-за стохастической природы схемы фиброза мы выполнили около 300 вычислений с различными текстурами фиброза для каждой данной комбинации размера рубца и уровня фиброза. Результаты этого эксперимента показаны на рис. 4. Динамическое закрепление не происходит, когда диаметр рубца был меньше 2.6 см, см. Рис. 4. Для шрамов такого маленького размера мы наблюдали отсутствие как разрыва, так и динамического закрепления. Мы объясняем это тем, что если начальное разделение разрывов волн, образовавшихся в рубце, невелико, два вторичных источника немедленно сливаются, восстанавливая форму волнового фронта и предотвращая образование вторичных источников [37].
Рис. 4. Фазовая диаграмма, показывающая область, в которой присутствует эффект закрепления, в двухпараметрическом пространстве: размер рубца и уровень фиброза.
Рубец имел равномерное распределение фиброза. Отметка «Притяжение» соответствует региону, где динамическая привязка была получена более чем в 65% случаев. «Нет притяжения» показывает регион, где эффект наблюдался менее чем в 65% случаев. Рубец располагался в 5 см от рубца.
https://doi.org/10.1371/journal.pcbi.1006637.g004
Также мы видим, что для этого эффекта требуется средний уровень плотности фиброза. При небольших уровнях фиброза вторичные разрывы не образуются (близко к границе фиброзной ткани).Кроме того, не может образоваться разрывов, если уровень фиброза превышает 41% в нашей 2D-модели (то есть ближе к сердцевине), поскольку ткань ведет себя как невыносимый рубец. При фиброзе> 41% рубец фактически становится большим препятствием, которое не может разрушить волны исходного ротора [37]. Вблизи порога в 41% мы также наблюдали еще одну интересную картину, когда разрывы образуются только внутри сердцевины рубца (внутри области> 41%) и не могут выходить на окружающие ткани, см. Дополнительный ролик S1.
Наконец, обратите внимание, что рис. 4 иллюстрирует только несколько факторов, важных для динамического закрепления в простой настройке изотропной модели сердечной ткани. Конкретные значения уровня фиброза и размера рубца также могут зависеть от анизотропии, текстуры фиброза и его возможного неоднородного распределения.
Динамическое закрепление в модели левого желудочка для конкретного пациента
Чтобы убедиться, что динамическое закрепление происходит в более реалистичной геометрии, мы разработали и исследовали этот эффект на модели левого желудочка человека для конкретного пациента, подробности см. В разделе «Метод».Рубец в этом наборе данных имеет сложную геометрию с несколькими компактными областями размером около 5-7 см, в которых процент фиброза постепенно изменяется от 0% до 41% в центре рубца на основе данных изображений, см. Раздел «Методы». Ремоделирование ионных каналов во всей области рубца также было включено в модель (включая пограничную зону, как описано в модели фиброза в разделе, посвященном методам). Мы изучили явление динамического закрепления для 16 различных местоположений сердечников ротора, случайным образом распределенных в срезе сердца примерно в 4 см от верхушки (см. Рис. 5).
Рис. 5. Эффект динамического закрепления ротора для индивидуальной модели левого желудочка после нижнебокового ИМ.
Красный цвет соответствует высокому трансмембранному напряжению, розовый цвет показывает рубец. В верхнем ряду показан левый желудочек в модифицированном виде спереди (где была начата спираль), а во втором ряду — в модифицированном виде сзади (расположение рубца). A: Ротор запускается на расстоянии 5 см от области рубца. B: Форма расставаний, делающая паттерн активации менее регулярным (2.6 с после инициализации) C: ротор закрепляется на рубце и постоянно вращается вокруг него (3,7 с после инициализации). D: 16 различных мест начального сердечника ротора в срезе на расстоянии 4 см от вершины. В нижнем ряду модели показаны там, где нет рубца, а спиральный сердечник остается в том же месте. Чтобы увидеть фильм о моделировании шрама, см. Дополнительный фильм S2.
https://doi.org/10.1371/journal.pcbi.1006637.g005
Анизотропия сердца была создана с помощью подхода, основанного на правилах, подробно описанного в разделе «Методы» (Модель левого желудочка человека). Из 16 начальных местоположений, показанных на рис. 5, во всех случаях имело место динамическое прикрепление к фиброзной ткани, с ионным ремоделированием и без него. После постановки на якорь в 4 случаях ротор аннигилировал. Эффект притяжения был усилен электрофизиологическим ремоделированием, аналогичным 2D.
Типичный пример нашего 3D-моделирования показан на рис. 5.Мы следовали тому же протоколу, что и для 2D-моделирования. Верхние 2 ряда — измененный вид спереди и измененный вид сзади в случае наличия рубца. В столбце A мы видим исходное расположение спирального сердечника (5 см от рубца), обозначенное черной стрелкой на виде спереди. В столбце B образовались разрывы из-за рубцовой ткани, и начал появляться вторичный источник. Через 3,7 с спираль закрепляется вокруг рубца, обозначенного черной стрелкой на виде сзади, и постоянно вращается вокруг него.В нижнем ряду мы показываем ту же симуляцию, но шрам не принимался во внимание. В этом случае спираль не меняет своего первоначального положения (только легкое движение, см. Черные стрелки).
Чтобы оценить, может ли этот эффект потенциально быть зарегистрирован в клинической практике, мы вычислили ЭКГ для наших 3D-симуляций. ЭКГ, соответствующая примеру на рис. 5, показана на рис. 6. В течение первых трех секунд ЭКГ показывает комплексы QRS, различающиеся по амплитуде и форме, а затем более однородную морфологию QRS между ударами с большей амплитудой.Это изменение морфологии связано с закреплением ротора, которое происходит примерно через три секунды после начала моделирования. Первоначальная нерегулярность связана с наличием вторичных источников с немного большим периодом, чем у исходного ротора. После закрепления ротора картина становится относительно стабильной, что соответствует обычной морфологии ЭКГ с зубцами пилы. Дополнительные ЭКГ для случаев прекращения аритмии и фиксации показаны на дополнительном S2 Рис.Для динамики фиксации мы видим аналогичные изменения в морфологии ЭКГ, как на рис. 6.
Рис. 6. Показан типичный пример вычисленной ЭКГ для эффекта привязки в 3D-модели.
ЭКГ отображается фиолетовым цветом, без отображения единиц измерения, поскольку важны только относительные единицы. Якорение наблюдается примерно в конце третьей секунды. После этого интервал сцепления увеличился.
https://doi.org/10.1371/journal.pcbi.1006637.g006
Динамическое закрепление сопровождается увеличением длины цикла (247 ± 16 мс против 295 ± 30 мс). Причина этого эффекта заключается в том, что вращение ротора вокруг препятствия — анатомический повторный вход — обычно медленнее, чем вращение ротора вокруг его собственного наконечника — функциональный повторный вход, который обычно находится на пределе длины цикла, разрешенном ERP.
Клинические ЭКГ, связанные с процессом динамического закрепления
В предыдущем разделе мы показали, что описанные результаты динамического закрепления в анатомической модели ЛЖ пациентов с постинфарктными рубцами соответствуют наблюдениям на ЭКГ во время инициации желудочковой аритмии.После начала у 18 из 30 пациентов (60%) наблюдалось изменение морфологии QRS в зависимости от времени. Прекардиальные отведения ЭКГ V2, V3 и V4 от двух пациентов изображены на рис. 7. Для обоих пациентов морфология QRS после дополнительных стимулов постепенно изменялась, но степень изменений здесь была различной. У пациента А это морфологическое изменение невелико, и обе части ЭКГ можно интерпретировать как переход от одной морфологии мономорфной желудочковой тахикардии к другой. Однако для пациента B переход от полиморфной желудочковой тахикардии (PVT) к MVT более очевиден.В остальных 16 случаях мы наблюдали различные вариации между двумя случаями, представленными на рис. 7. Дополнительный рис. S3 показывает примеры ЭКГ 4 других пациентов. Здесь у пациентов 1 и 2 мы видим существенные изменения комплексов QRS после инициации аритмии и последующее преобразование в MVT. Запись у пациента 3 менее полиморфна, а у пациента 4 мы наблюдаем явный сдвиг ЭКГ от одной морфологии к другой. Это может произойти, например, если из-за неоднородности подлежащей ткани дополнительные источники возбуждения формируются исходным источником.В целом морфология с четким изменением от PVT к MVT наблюдалась в 5/18 или 29% случаев. Эти разные степени вариации морфологии QRS могут быть вызваны многими причинами, а именно близостью созданного источника аритмии к области закрепления, лежащей в основе степени неоднородности и фиброза в месте инициации ротора, сложной формой рубца и т. Д.
Рис. 7. Прекардиальные отведения ЭКГ V2, V3 и V4, записанные во время индукции желудочковой тахикардии у двух пациентов с рубцами в левом желудочке.
Первые доли — ритмы с заданным темпом; отметка «0 мсек» указывает на последние экстростимулы во время запрограммированной стимуляции желудочков.
https://doi.org/10.1371/journal.pcbi.1006637.g007
Хотя этот результат не является доказательством, он подтверждает, что феномен якорения может возникать в клинических условиях и служить возможным механизмом быстрой ЖТ, вызванной запрограммированной стимуляция.
Динамическое закрепление отдаленных источников аритмии фиброзными областями посредством реструктуризации паттерна активации
Динамическое закрепление удаленного ротора в 2D-модели сердечной ткани
Фиброзные рубцы могут не только закрепить роторы, но могут динамически закрепить их на большом расстоянии .В первых экспериментах мы изучали динамику спиральной волны с фиброзным рубцом и без него в общем исследовании. Диаметр фиброзной области составлял 6,4 см, исходя из аналогичного размера рубцов у пациентов с задокументированной и индуцированной ЖТ (см. Раздел «Методы», Магнитно-резонансная томография). Процент фиброза изменялся линейно от 50% в центре рубца до 0% на границе рубца. Мы запустили ротор на расстоянии 15,5 см от рубца (, панель A), который имел период 222 мс, и изучили его динамику.
Динамическое закрепление удаленного ротора на фиброзной области в 2D-модели.Невозбудимая фиброзная ткань показана оранжевым цветом, а трансмембранное напряжение показано оттенками серого.
Фиброзный рубец:
A: Ротор был инициирован на расстоянии 15,5 см от границы фиброзной области.
B: Волновой фронт начинает разрушаться на рубцовой области, образуя вторичные источники.
C-D: Вторичные источники начали распространяться к исходному ротору.
D: Вторичные источники достигают начального ротора.
E: Один вторичный источник объединится с начальным ротором, см. Белый кружок.
F: Вторичный источник слился с исходным ротором, в левой части ткани ротора больше нет.
G: Главный ротор теперь обозначен белым кружком, процесс аннигиляции ротора начинается снова.
H-I: Аннигиляция нового ротора снова приводит к тому, что доминирующий ротор находится ближе к рубцу.
J-K: Доминирующий ротор снова сливается с вторичным источником (белый кружок), что приводит к реструктуризации модели активации.
L: ротор теперь прикреплен к рубцу.
Без рубца
A: Слева от ткани был запущен ротор.
B-C: Эти роторы остаются стабильными в течение 20 секунд моделирования.
Некротический рубец A: ротор был инициирован слева от ткани, или на расстоянии 15,5 см от границы некротического рубца.
B-C: Эти роторы остаются стабильными в течение 20 секунд моделирования.
Во-первых, через несколько секунд паттерн активации стал менее регулярным, и в фиброзной области появилось несколько вторичных волновых разрывов (, панель B). Эти неровности начали распространяться к кончику исходного ротора (, панель C-D), создавая сложную картину активации между рубцом и исходным ротором. Затем один из вторичных источников достиг вершины исходного ротора (, панель E). Затем этот вторичный источник слился с начальным ротором (, панель F), что привело к замедлению схемы активации и стимулировало цепную реакцию аннигиляции всех вторичных прерываний волны в окрестности исходного ротора.В этот момент при моделировании доминировал вторичный источник, расположенный ближе к рубцу (, панель G). Теперь весь процесс начался снова (панели H-K), пока, наконец, только один источник не стал основным источником, прикрепленным к рубцу () с периодом вращения 307 мс. Для наглядности фильм этого процесса представлен как дополнительный фильм S1.
Обратите внимание, что этот процесс происходит только при наличии рубца с окружающей фиброзной зоной. В моделировании, озаглавленной «Без рубца», мы показываем контрольный эксперимент, когда для ткани без рубца использовались те же начальные условия.На панели, озаглавленной «Некротический рубец», показано моделирование только компактной области без окружающей фиброзной ткани. В обоих случаях ротор был устойчивым и находился в исходном положении в течение всего периода моделирования. Важное отличие здесь от процессов, показанных в (Фибротический рубец), заключается в том, что в случаях «Нет рубца» и «Некротического рубца» не возникает новых волн, и, таким образом, у нас нет сложного динамического процесса перестройки паттернов возбуждения. Мы называем этот сложный динамический процесс, приводящий к закреплению удаленного ротора, динамическим закреплением.Хотя этот процесс содержит этап сложного поведения, в целом он чрезвычайно надежен и воспроизводим в очень широком диапазоне условий. Во второй серии моделирования исходный ротор был размещен на разном расстоянии от границы рубца, в пределах от 1,8 до 14,3 см, чтобы определить возможные результаты, см. Здесь, в дополнение к одиночному закрепленному ротору, показанному на рисунке, мы могли также получить другие конечные результаты динамического закрепления: мы получили роторы, вращающиеся в противоположном направлении (, вверху), роторы с двойными рычагами, закрепленные на якоре, которые имели 2 волновых фронта, вращающихся вокруг фиброзных областей (, посередине) или аннигиляция роторов (внизу, где нет волны вокруг рубца), что обычно происходит в результате аннигиляции повторяющегося рисунка в форме восьмерки.Подводя итог, мы получили следующие возможные результаты:
Панель A: Типы результирующих паттернов активации: (1) ротор, вращающийся в направлении, противоположном исходному ротору, (2) двуплечий ротор и (3) прекращение активности. Панель B: Тип результирующего паттерна активации в зависимости от расстояния между ротором и границей рубца. Красный цвет указывает: результирующий образец активации представляет собой ротор, вращающийся либо в том же направлении, что и исходный ротор, либо в противоположном направлении.Зеленый цвет означает: результирующий образец активации представляет собой ротор с двумя или тремя лопастями. Синий указывает: электрическая активность исчезает после динамической перестройки паттерна активации.
, панель B представляет относительную вероятность возникновения упомянутых паттернов активации в зависимости от расстояния между ротором и границей рубца. Мы действительно видим, что для меньших начальных расстояний результирующая картина активации всегда представляет собой один ротор, вращающийся в одном направлении.С увеличением расстояния возможны другие схемы крепления. Если расстояние было больше, чем примерно 9 см, есть как минимум 50% шанс получить либо многорукавный ротор, либо прекращение активности. Также отметим, что такое динамическое закрепление происходило с огромных расстояний: мы изучали роторы, расположенные на расстоянии до 14 см от рубца. Однако мы заметили, что даже на очень больших расстояниях, таких как 25 см или более, такое динамическое закрепление (или прекращение паттерна активации) всегда возможно, при условии, что было предоставлено достаточно времени.
Мы измерили время, необходимое для фиксации роторов, в зависимости от расстояния до рубца. Для каждого расстояния мы выполнили около 60 вычислений с использованием различных начальных значений генератора случайных чисел, как с учетом ионного ремоделирования, так и без него. Результаты этого моделирования показаны на. Мы видим, что время, необходимое для динамического закрепления, линейно зависит от расстояния между границей рубца и исходным ротором. Синие и желтые линии соответствуют модели рубца с ионным ремоделированием и без него, соответственно (ионное ремоделирование моделировалось уменьшением проводимости I Na , I Kr и I Ks , как объяснено в разделе «Методы»).Мы интерпретируем эти результаты следующим образом; Время закрепления в основном определяется распространением хаотического режима к сердцевине исходного ротора, и этот процесс имеет четкую линейную зависимость. Для удаленных роторов распространение этого хаотического режима в основном происходит за пределами области ионного ремоделирования, и, таким образом, обе кривые имеют одинаковый наклон. Однако при ионном ремоделировании APD в области рубца продлевается. Это создает неоднородность и, как следствие, образуются примерно 3 начальных разрыва в области рубца.На 5 секунд раньше в модели рубца с ремоделированием по сравнению с моделью рубца без ремоделирования.
Скрипичный график зависимости времени, необходимого для закрепления или остановки ротора, от начального расстояния между концом ротора и границей фиброзной области в 2D-модели.Желтым цветом обозначена модель фиброза, в которой учитывается ионное ремоделирование, а синим цветом показано, что фиброз моделируется только путем введения небольших непреодолимых препятствий.
Чтобы определить некоторые свойства субстрата, необходимые для динамического закрепления, мы варьировали размер и уровень фиброза внутри рубца и исследовали, присутствует ли динамическое закрепление.Из-за стохастической природы схемы фиброза мы выполнили около 300 вычислений с различными текстурами фиброза для каждой данной комбинации размера рубца и уровня фиброза. Результаты этого эксперимента показаны на. При диаметре рубца менее 2,6 см динамического закрепления не происходит. Для шрамов такого маленького размера мы наблюдали отсутствие как разрыва, так и динамического закрепления. Мы объясняем это тем, что если начальное разделение разрывов волн, образовавшихся в рубце, невелико, два вторичных источника немедленно сливаются, восстанавливая форму волнового фронта и предотвращая образование вторичных источников [37].
Фазовая диаграмма, показывающая область, в которой присутствует эффект закрепления, в двухпараметрическом пространстве: размер рубца и уровень фиброза.Рубец имел равномерное распределение фиброза. Отметка «Притяжение» соответствует региону, где динамическая привязка была получена более чем в 65% случаев. «Нет притяжения» показывает регион, где эффект наблюдался менее чем в 65% случаев. Рубец располагался в 5 см от рубца.
Также мы видим, что для этого эффекта требуется средний уровень плотности фиброза.При небольших уровнях фиброза вторичные разрывы не образуются (близко к границе фиброзной ткани). Кроме того, не может образоваться разрывов, если уровень фиброза превышает 41% в нашей 2D-модели (то есть ближе к сердцевине), поскольку ткань ведет себя как невыносимый рубец. При фиброзе> 41% рубец фактически становится большим препятствием, которое не может разрушить волны исходного ротора [37]. Вблизи порога в 41% мы также наблюдали еще одну интересную картину, когда разрывы образуются только внутри сердцевины рубца (внутри области> 41%) и не могут выходить на окружающие ткани, см. Дополнительный ролик S1.
Наконец, обратите внимание, что это иллюстрирует только несколько факторов, важных для динамического закрепления в простой настройке изотропной модели сердечной ткани. Конкретные значения уровня фиброза и размера рубца также могут зависеть от анизотропии, текстуры фиброза и его возможного неоднородного распределения.
Динамическое закрепление в модели левого желудочка для конкретного пациента
Чтобы убедиться, что динамическое закрепление происходит в более реалистичной геометрии, мы разработали и исследовали этот эффект на индивидуальной для пациента модели левого желудочка человека, см. Метод раздел для деталей.Рубец в этом наборе данных имеет сложную геометрию с несколькими компактными областями размером около 5-7 см, в которых процент фиброза постепенно изменяется от 0% до 41% в центре рубца на основе данных изображений, см. Раздел «Методы». Ремоделирование ионных каналов во всей области рубца также было включено в модель (включая пограничную зону, как описано в модели фиброза в разделе, посвященном методам). Мы изучили явление динамического закрепления для 16 различных местоположений сердечников ротора, случайным образом распределенных в срезе сердца примерно в 4 см от верхушки (см.).
Эффект динамического закрепления ротора для индивидуальной модели левого желудочка после инферолатерального инфаркта миокарда.Красный цвет соответствует высокому трансмембранному напряжению, розовый цвет показывает рубец. В верхнем ряду показан левый желудочек в модифицированном виде спереди (где была начата спираль), а во втором ряду — в модифицированном виде сзади (расположение рубца). A: Ротор запускается на расстоянии 5 см от области рубца. B: Форма расставаний, делающая паттерн активации менее регулярным (2.6 с после инициализации) C: ротор закрепляется на рубце и постоянно вращается вокруг него (3,7 с после инициализации). D: 16 различных мест начального сердечника ротора в срезе на расстоянии 4 см от вершины. В нижнем ряду модели показаны там, где нет рубца, а спиральный сердечник остается в том же месте. Чтобы увидеть фильм о моделировании шрама, см. Дополнительный фильм S2.
Анизотропия сердца была создана с помощью подхода, основанного на правилах, подробно описанного в разделе «Методы» (Модель левого желудочка человека).Из 16 начальных местоположений, показанных на, во всех случаях имело место динамическое прикрепление к фиброзной ткани, с ионным ремоделированием и без него. После постановки на якорь в 4 случаях ротор аннигилировал. Эффект притяжения был усилен электрофизиологическим ремоделированием, аналогичным 2D.
Типичный пример нашего 3D-моделирования показан на. Мы следовали тому же протоколу, что и для 2D-моделирования. Верхние 2 ряда — измененный вид спереди и измененный вид сзади в случае наличия рубца.В столбце A мы видим исходное расположение спирального сердечника (5 см от рубца), обозначенное черной стрелкой на виде спереди. В столбце B образовались разрывы из-за рубцовой ткани, и начал появляться вторичный источник. Через 3,7 с спираль закрепляется вокруг рубца, обозначенного черной стрелкой на виде сзади, и постоянно вращается вокруг него. В нижнем ряду мы показываем ту же симуляцию, но шрам не принимался во внимание. В этом случае спираль не меняет своего первоначального положения (только легкое движение, см. Черные стрелки).
Чтобы оценить, может ли этот эффект потенциально быть зарегистрирован в клинической практике, мы вычислили ЭКГ для наших 3D-симуляций. ЭКГ, соответствующая примеру в, показана на. В течение первых трех секунд ЭКГ показывает комплексы QRS, различающиеся по амплитуде и форме, а затем более однородную морфологию QRS между ударами с большей амплитудой. Это изменение морфологии связано с закреплением ротора, которое происходит примерно через три секунды после начала моделирования. Первоначальная нерегулярность связана с наличием вторичных источников с немного большим периодом, чем у исходного ротора.После закрепления ротора картина становится относительно стабильной, что соответствует обычной морфологии ЭКГ с зубцами пилы. Дополнительные ЭКГ для случаев прекращения аритмии и закрепления показаны на дополнительном S2 Рис. Для динамики привязки мы видим аналогичные изменения в морфологии ЭКГ, как на рис.
Показан типичный пример вычисленной ЭКГ для эффекта привязки в 3D-модели.ЭКГ отображается фиолетовым цветом, без отображения единиц измерения, поскольку важны только относительные единицы.Якорение наблюдается примерно в конце третьей секунды. После этого интервал сцепления увеличился.
Динамическое закрепление сопровождается увеличением длины цикла (247 ± 16 мс против 295 ± 30 мс). Причина этого эффекта заключается в том, что вращение ротора вокруг препятствия — анатомический повторный вход — обычно медленнее, чем вращение ротора вокруг его собственного наконечника — функциональный повторный вход, который обычно находится на пределе длины цикла, разрешенном ERP.
Клинические ЭКГ, связанные с процессом динамического закрепления
В предыдущем разделе мы показали, что описанные результаты динамического закрепления в анатомической модели ЛЖ пациентов с постинфарктными рубцами соответствуют наблюдениям на ЭКГ во время инициации желудочкового аритмия.После начала у 18 из 30 пациентов (60%) наблюдалось изменение морфологии QRS в зависимости от времени. Прекардиальные отведения ЭКГ V2, V3 и V4 от двух пациентов показаны на. У обоих пациентов морфология QRS после дополнительных стимулов постепенно изменялась, но степень изменений здесь была разной. У пациента А это морфологическое изменение невелико, и обе части ЭКГ можно интерпретировать как переход от одной морфологии мономорфной желудочковой тахикардии к другой. Однако для пациента B переход от полиморфной желудочковой тахикардии (PVT) к MVT более очевиден.В остальных 16 случаях мы наблюдали различные различия между двумя случаями, представленными в. Дополнительный S3 Fig показывает примеры ЭКГ 4 других пациентов. Здесь у пациентов 1 и 2 мы видим существенные изменения комплексов QRS после инициации аритмии и последующее преобразование в MVT. Запись у пациента 3 менее полиморфна, а у пациента 4 мы наблюдаем явный сдвиг ЭКГ от одной морфологии к другой. Это может произойти, например, если из-за неоднородности подлежащей ткани дополнительные источники возбуждения формируются исходным источником.В целом морфология с четким изменением от PVT к MVT наблюдалась в 5/18 или 29% случаев. Эти разные степени вариации морфологии QRS могут быть вызваны многими причинами, а именно близостью созданного источника аритмии к области закрепления, глубинной степенью неоднородности и фиброза в месте инициации ротора, сложной формой рубца и т. Д.
Прекардиальные отведения ЭКГ V2, V3 и V4, записанные во время индукции желудочковой тахикардии у двух пациентов с рубцами в левом желудочке.Первые доли — ритмы с заданным темпом; отметка «0 мсек» указывает на последние экстростимулы во время запрограммированной стимуляции желудочков.
Хотя это открытие не является доказательством, оно подтверждает, что явление закрепления может возникать в клинических условиях и служить возможным механизмом быстрой ЖТ, вызванной запрограммированной стимуляцией.
Wolf Tooth Rotor Tool — Обзор
Wolf Tooth Components производит широкий спектр элементов производительности, наиболее популярными из которых являются зубья бустерной кассеты, узкие широкие передние звезды Drop Stop и удлинительные сегменты Goat Link, которые адаптируют Shimano к 10 и 11 скоростям. Задние переключатели переключают кассеты с 42 на 45 зубьев.Сегодня мы рассмотрим гораздо более простой, но, тем не менее, очень удобный элемент. 32-граммовый алюминиевый выпрямитель тормозного ротора Wolf Tooth имеет открывалку для бутылок напротив его рабочего конца и профилирован так, чтобы избежать любых острых краев или углов, которые могут нанести вред падающему всаднику или соседнему содержимому в его или ее сумке с инструментами. (Это было длинное предложение, но я хотел резюмировать описание и продолжить его.) Вы можете приобрести один из этих прекрасных инструментов непосредственно в Wolf Tooth или в лучших магазинах по всему миру за 19 долларов.90 USD — анодирование в одном из семи цветов, не меньше.
Компоненты Wolf Tooth
On the Trail
Конечно, вы можете использовать любой старый разводной гаечный ключ, чтобы выправить изогнутый ротор, но не могли бы вы положить этот маслянистый якорь в свой гидратационный пакет или карманы ваших трусов Specialized Power Panties и взять его вместе прокатиться? Едва. Вот почему роторный инструмент Wolf Tooth так хорош. Он настолько легкий и тонкий, что вы забудете о том, что вы его взяли с собой, пока не услышите ужасный звук, который говорит о том, что вы только что разбили свой ротор.Вот тогда вы достанете его и покажете этому трейл-байку свою волшебную палочку из анодированного волчьего зуба. Прокрутите колесо, определите источник этих колебаний и начните настраивать ротор. Через минуту или две вы будете ездить на счастливом и бесшумном велосипеде.
Pinkbike’s Take:
| Выпрямитель ротора Wolf Tooth — отличный инструмент, и двадцать долларов будут потрачены не зря после вашего первого сохранения ротора. Это все равно, что спрятать хороший гаечный ключ — он вам редко понадобится, но когда вы это сделаете, профессиональный инструмент может изменить ситуацию между разочарованием в лесу или моментом быстрого решения проблемы.И он открывает пиво. — RC |
Ремонт тормозных дисков
Вы приближаетесь к скорости по шоссе, и внезапно машина пересекает вашу полосу движения, чтобы съехать. Вам удается снизить скорость, чтобы избежать неприятной аварии, но тормоза определенно не работают. Педаль тормоза уже пару недель испытывает такую вибрацию, но только на малых оборотах. Теперь кажется, что вы наступаете на работающую цепную пилу, а передние колеса не хотят идти туда, куда вы хотите.
Забудьте о догадках
Потяните за колеса, чтобы увидеть крупным планом. При снятых колесах вы можете осмотреть контактные поверхности ротора и футеровки. Сначала найдите трещину, которая проходит через вентилируемый ротор или, по крайней мере, на одной из двух его поверхностей. Треснувший ротор вызывает сильную пульсацию, и единственное лекарство — замена.
Ржавчина на краях ротора бессмысленна, как и умеренные царапины на поверхности диска или несколько нецветных пятен на блестящих участках, охваченных колодками.Однако не забудьте проверить обе стороны ротора. Когда вы тянете колеса, на задней стороне должно быть доступное место (даже если есть пылезащитный экран), где вы можете осмотреть поверхность. Проблемой является сильное ржавление контактных поверхностей футеровки. А также толстые, глубокие порезы, неравномерная толщина и боковое биение (коробление).
* Для получения дополнительной информации о том, как работают дисковые тормоза, щелкните здесь.
Если поверхность роторов никогда не заменялась, теоретически возможно произвести их механическую обработку для удаления значительной ржавчины и глубоких царапин (около.060 дюймов глубиной). Однако многие роторы поздних моделей изначально не очень толстые и не могут выдерживать более 0,030 дюйма. шлифовка. Если ротор не как минимум на 0,060 дюйма толще, чем минимальная толщина, указанная где-то на роторе, забудьте о попытках сохранить его. Купить новые роторы. Как вы можете проверить глубину оценки? Если он достаточно толстый, вставьте в него головку десятицентовика. Если десятицентовик уйдет за пределы головы президента, счет будет слишком глубоким. Если царапина слишком тонкая, чтобы в нее можно было проскользнуть, она безвредна.Другой тест — провести ногтем по поверхности в радиальном направлении. Если ваш гвоздь заедает, ротор необходимо заменить. Если нет, то, вероятно, все в порядке, при условии, что на работающем роторе осталась достаточная толщина.
Равномерная толщина имеет решающее значение. Измерьте каждый ротор внешним микрометром в нескольких точках, равномерно расположенных вокруг контактной поверхности футеровки. Вариации 0,005 дюйма или более достаточно, чтобы вызвать пульсацию, которую вы чувствуете.
Боковое биение вызвано ротором однородной толщины, но волнистым.Неравномерная толщина и чрезмерное биение часто идут рука об руку. То есть биение вызывает неравномерный износ ротора. Поэтому, если вы поймаете это раньше, ротор может пройти проверку на толщину, но у него все равно может быть чрезмерное боковое биение. Сильный нагрев (а затем быстрое охлаждение) от резкого торможения является основной причиной биения, но за ним следует неравномерная затяжка гаек колесных болтов. Скопление грязи или ржавчины между ротором и ступицей также может вызвать биение.
Для проверки чрезмерного биения / деформации вам понадобится циферблатный индикатор, который можно взять напрокат во многих магазинах автозапчастей.Когда вы тянете колеса, роторы могут ослабнуть на шпильках, поэтому установите на место гайки и надежно затяните их. Установите циферблатный индикатор и закрепите его на подвеске. Затем наведите плунжер индикатора на середину контактной поверхности футеровки под углом как можно ближе к 90 °. Установите плунжер так, чтобы он слегка прижимался к контактной поверхности футеровки ротора, затем обнулите шкалу. Медленно вращайте ротор и следите за шкалой. Если оно превышает 0,005 дюйма, ротор работает неправильно.
Возможно, вам не придется заменять или восстанавливать поверхность ротора.Выключив ротор, вы можете искать и удалять налет грязи или ржавчины. Если проблема не в этом, вы можете попробовать переиндексировать ротор. То есть просто снимите его, поверните на одно или два отверстия под штифт, установите и затяните гайки крепления и повторите проверку. Хотя обычный ротор просто соскальзывает со шпилек при снятом колесе (может потребоваться некоторое предварительное опрыскивание проникающим растворителем), сначала необходимо снять суппорт.
Сначала снимите болты, которыми сам суппорт крепится к анкерной раме или к подвеске.Затем приподнимите суппорт, снимите его с рамы и подключите к подвеске. Это снизит нагрузку на тормозной шланг. Многие автомобили имеют откидные суппорты. Снимите один нижний стопорный болт, поднимите суппорт и снимите его со шпильки. Если тормозные колодки остаются в анкерной раме, возможно, удерживаются фиксирующим зажимом, затем удалите их.
Наконец, открутите анкерную раму, поднимите ее, и ротор должен соскользнуть. Но сначала, если ротор не обязательно заменяется, сделайте отметки совмещения на секции ступицы и шпильке, чтобы вы могли переустановить его в том же месте.Если он заедает на ступице, это нормальное образование ржавчины. Просто опрыскайте шпильки, отверстия и соединения ступицы / ротора проникающим растворителем, покачайте ротор тянущим движением, и он должен улететь. Очистите ступицу от ржавчины ультратонкой наждачной бумагой или металлической щеткой. Также очистите сопрягаемую поверхность ротора.
Если вы работаете с задними дисками, они, вероятно, будут иметь механический привод для функции стояночного тормоза или стояночный тормоз барабанного типа, встроенный в ступицу. В случае барабанного типа сам ротор будет иметь глубокую «шляпочную» секцию, подходящую для ступицы, а внутренняя часть этой шляпы является барабаном для стояночного тормоза.Обычно при выключенном стояночном тормозе ротор просто соскальзывает, но если стояночный тормоз имеет саморегулирующуюся тягу, возможно, что он слишком отрегулирован, и накладки барабанных башмаков заблокированы внутри шляпки. В этом случае вы можете достать сзади через отверстие для доступа (в ступице, а также, возможно, через пылезащитный экран) и отодвинуть регулятор. С типом, который использует привод на накладках дискового тормоза, вы можете просто снять суппорт. В худшем случае вам сначала придется отсоединить тормозной трос от привода на суппорте.
Канавки на поверхности достаточно глубокие, чтобы зацепиться за ноготь, необходимо удалить, обработав тормоз на токарном станке.
Циферблатный индикатор покажет вам полное боковое биение — 0,005 дюйма — это слишком много.
Установка
Если вам нужен новый ротор, установите его прямо из коробки. Некоторые легкие роторы, изготовленные из штампованной стальной ступицы с чугунной тормозной поверхностью, могут быть деформированы, если вы не проверите их со всеми установленными и затянутыми гайками.
Примечание. Есть роторы, которые очень сложно удалить, поэтому, если производитель транспортного средства указывает специальные инструменты или если необходим пресс, ротор можно обработать на транспортном средстве. Лучше оставить это профессионально экипированному.
Обе стороны, пожалуйста
Обычно то, что происходит с одним колесом, происходит с другим. Если один ротор отсутствует, а другой не подходит для обработки, замените оба. Однако, если один из них особенно плох, возможно, автомобиль тянет, оставляя другую сторону нетронутой.Тормоз может применяться неравномерно, возможно, из-за гидравлической или механической проблемы с колесом. Помимо устранения проблемы с ротором, выявите причину.
Очистите гайки и резьбу шпилек мягким растворителем и вытрите насухо. Не смазывайте их, так как сегодняшние требования к крутящему моменту основаны на чистой, сухой резьбе. Один из самых важных инструментов, который вы можете использовать, — это динамометрический ключ. При повторной индексации ротора обязательно установите на место зажимные гайки и затяните их в соответствии со спецификациями как минимум в три этапа.Используйте крест-накрест на каждом этапе, пока все не получится плотно.
Для снятия дисковых задних тормозов может потребоваться сначала отключить регуляторы стояночного тормоза, чтобы ослабить натяжение колодок стояночного тормоза.
КАК ЭТО РАБОТАЕТ: ТОРМОЗНОЙ РОТОР
Тормозной ротор, диск в дисковых тормозах крепятся на ступицу с колесом, и ротор, и ступица удерживаются одними и теми же шпильками и гайками.Когда вы нажимаете на тормоз, гидравлическое устройство, называемое суппортом, прижимает тормозные колодки (также называемые колодками) к ротору, а фрикционный материал на колодках останавливает вращение ротора (и, следовательно, колеса). Фрикционный материал на колодках вызывает преобразование энергии движения колеса и ротора в тепло, и температура ротора может взлететь до более чем 1000 ° F при резкой остановке. Это тепло должно отводиться очень быстро, чтобы ротор мог остыть перед следующей остановкой. Поскольку передние тормоза выполняют около 75 процентов работы в автомобиле с передним приводом (более 50 процентов в автомобиле с задним приводом), передние роторы должны рассеивать гораздо больше тепла, чем задние тормоза, барабанные или дисковые.В результате передние роторы практически всех современных автомобилей имеют два контактных слоя, разделенных вентиляционной зоной, которая напоминает лопаточный вентилятор, для выпуска горячего воздуха. Такая конструкция не только дает каждой тормозной колодке отдельный диск, но и поток воздуха через центр обеспечивает лучшее охлаждение. Некоторые высокопроизводительные автомобили также имеют вентилируемые задние диски.
Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты.Вы можете найти больше информации об этом и подобном контенте на сайте piano.