


Постоянное совершенствование технологий и развитие точного электрооборудования приводит к созданию новых и преобразованию старых устройств. Такому совершенствованию подвергаются и электрические машины, которые неоднократно преобразовывались для получения точного позиционирования. При массовом внедрении полупроводниковых приборов появилась возможность заменить классические щетки на p-n переходы, в результате чего был создан вентильный двигатель.
Конструкция и принцип работы
Конструктивно вентильный агрегат представляет собой разновидность синхронного двигателя.
В его состав входят:
- Ротор, как правило, из магнитного материала, реагирующий на воздействие электромагнитного поля.
- Статор, включающий в себя фазы обмоток, намотанные в катушки станину и диэлектрическую прокладку.
- Измерительные датчики (чаще всего Холла)
- Микропроцессорный блок, формирующий импульсы, их форму, задающие частоту вращения ротора, сравнивающий показания датчиков и подаваемого переменного тока на фазные обмотки.
Пример конструкции вентильного двигателя приведен на рисунке ниже:
 Рис. 1. Конструкция вентильного двигателя
Рис. 1. Конструкция вентильного двигателяПринцип работы вентильного двигателя заключается в четком позиционировании постоянных магнитов на роторе по отношению к формируемому пику электромагнитного импульса на фазных электрических обмотках. При движении магнитов датчики воспринимают информацию об их положении в пространстве и меняют пропускную способность реактивных вентильных преобразователей, что позволяет валу вращаться дальше. Таким образом, управление вращением осуществляется без использования скользящего контакта, поэтому данная категория электрических машин относится к категории бесколлекторных электродвигателей.
Статор
 Рис. 2. Конструкция статора вентильного двигателя
Рис. 2. Конструкция статора вентильного двигателяКонструктивно статор мало чем отличается от классических моделей синхронных и асинхронных двигателей. Это металлический цельнолитой или наборной магнитопровод, в пазах которого укладываются фазные провода. Количество обмоток якоря определяется числом подключаемых фаз и периодичностью их чередования. Чем чаще уложены обмотки статора, тем точнее контролируется вращение вентильного электродвигателя.
Полюса статора также могут характеризоваться смещением на строго определенный угол, как и его обмотки. По количеству фаз коммутации вентильные двигатели бывают двух-, трех-, четырех- и шестифазными.
Ротор
В зависимости от конструкции ротора бесконтактные двигатели могут иметь внутрироторное и внешнероторное исполнение.

Количество пар полюсов также может отличаться, но уже без каких-либо привязок к обмоткам, как правило, этот параметр варьируется от двух до шестнадцати с парным шагом.
В более старых моделях для бесколлекторных двигателей использовались постоянные магниты из ферритовых сплавов. Которые отличались доступностью и относительно более низкой себестоимостью, но имели слишком низкие показатели индукции. Однако с постепенным развитием технологий, на смену им пришли магнитные элементы из редкоземельных металлов. Этот вариант обладает более точным позиционированием, но и стоит он дороже.
 Рис. 4. Вентильный двигатель с внешним ротором
Рис. 4. Вентильный двигатель с внешним роторомДатчик положения ротора
В синхронных электродвигателях датчик необходим для осуществления обратной связи с положением вала механического устройства. В зависимости от принципа действия могут применяться датчики:
- Фотоэлектрического принципа действия;
- Трансформаторного;
- Индуктивного;
- На эффекте Холла.

Наиболее распространенными вариантами для практической реализации стали фотоэлектрические датчики и датчики с эффектом Холла. Они обладают большей точностью и меньше запаздывают при передаче данных в канале связи. Датчики привязываются к определенным маркерам на валу и реагируют на их прохождение.
Система управления
В состав блока управления, как правило, входит микроконтроллер и электронный ключ для подключения к двух- или трехфазным обмоткам двигателя. Микроконтроллер или микропроцессор необходим для обработки получаемых с датчиков сигналов и последующего преобразования синусоидальной коммутации в более удобную форму сигнала. Электрические преобразователи выполняется на базе полупроводниковых транзисторов, соединенных по мостовой схеме. Они производят широтно-импульсную модуляцию питающего напряжения в соответствии с заданным режимом работы.
 Рис. 6. Электронный ключ вентильного двигателя
Рис. 6. Электронный ключ вентильного двигателяКлассификация
По типу питания вентильные электрические машины подразделяются на электродвигатели постоянного и переменного тока.
По способу взаимодействия магнитного поля статора и ротора встречаются синхронные, асинхронные и индукторные аппараты.
Помимо этого, в зависимости от числа задействованных фаз они разделяются на:
- Однофазные – представляю собой наиболее простой вариант, где используется минимум линий передачи питающего напряжения от блока управления к его обмоткам. Однако в некоторых позиция существует трудность пуска такого вентильного двигателя под нагрузкой.
- Двухфазные – обладают хорошей связью между обмоткой и статором. Но выдают довольно сильные пульсации, которые могут привести к негативным последствиям в работе.
- Трехфазные – наиболее распространенные варианты, способные выдать плавный пуск и нормальный режим работы вентильного двигателя. Характеризуется четным количеством обмоток и хорошими тяговыми характеристиками. К его недостаткам относят лишь чрезмерный шум во время работы.
- Четырехфазные – характеризуются минимальными пульсациями низким пусковым моментом. Но, в сравнении с другими моделями, они имеют высокую себестоимость, из-за чего применяются редко.
 Рис. 7. Четырехфазный вентильный двигатель
Рис. 7. Четырехфазный вентильный двигательТехнические характеристики
При выборе конкретной модели важно определить ее соответствие месту установки, поэтому важно обращать внимание на следующие характеристики вентильных двигателей:
- номинальное напряжение – определяет питающую величину, которая должна подаваться на вентильный двигатель для получения номинального усилия;
- потребляемая мощность – характеристика электродвигателя, показывающая величину мощности, расходуемую на работу устройства;
- КПД – показывает соотношение полезной работы, совершаемой вентильным двигателем к израсходованной мощности;
- мощность на валу – полезная работа электрической машины, совершаемая за счет тягового усилия;
- номинальная частота – определяет количество оборотов в минуту, которые вентильный двигатель может совершать в номинальном режиме работы;
- диапазон регулировки частоты – показывает, в каких пределах можно изменять частоту оборотов вала для конкретной модели;
- номинальный крутящий момент – определяет усилие, создаваемое на валу вентильного двигателя при оптимальных параметрах работы, также в параметрах может регламентироваться пусковой и максимальный момент;
- коэффициент нагрузки – показывает, насколько снижается эффективность электрической машины, в зависимости от подъема над уровнем моря;
- габаритные размеры и масса вентильного двигателя.
Преимущества и недостатки
В сравнении с другими типами электрических машин, вентильный двигатель имеет ряд качественных отличий, дающих ему как выгодное, превосходство, так и определенные недостатки.
К преимуществам вентильных двигателей относят:
- Относительно небольшая величина магнитных потерь из-за отсутствия постоянно действующего поля, как в классических синхронных и асинхронных электродвигателях.
- Обеспечивает безопасное вращение даже с максимальной нагрузкой, в отличии от коллекторных электродвигателей.
- За счет встроенного преобразователя частоты коммутация вентильного преобразователя обеспечивает широкий спектр скоростей вращения, которые отличаются плавным переходом от одной к последующей.
- Хорошая динамика работы и точность позиционирования, способная создать конкуренцию шаговым двигателям.
- Относительно большая степень надежности и длительный срок эксплуатации без обслуживания за счет отсутствия скользящего контакта, в отличии от коллекторных двигателей.
- Может применяться во взрывоопасной среде, в отличии от электродвигателей постоянного и переменного тока со щетками.
К недостаткам вентильных агрегатов следует отнести их высокую себестоимость, наличие дополнительных элементов, усложняющих последующую эксплуатацию. Также существенным минусом считается сложность управления и задания логики перемещения рабочих органов трехфазных бесколлекторных двигателей в соответствии с меняющимися факторами производственного процесса.
Применение
Вентильные двигатели применяются во всех сферах, где требуется регулировать скорость вращения рабочего элемента. Такие синхронные приводы имеют точное позиционирование и применяются для компьютерной техники, устройств привода, винчестера, куллеров обдува и т.д.
 Рис. 8. Вентильный двигатель в компьютере
Рис. 8. Вентильный двигатель в компьютереПомимо этого он используется в робототехнике, строительстве спутников, летательных аппаратов. Для бытовой техники, в устройствах автомобилестроения, в медицинской сфере. Также нашел широкое применение в станочном оборудовании, горнодобывающих машинах, используется в компрессорных установках и насосных станциях.
Вентильный двигатель — Википедия
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесконтактным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2]
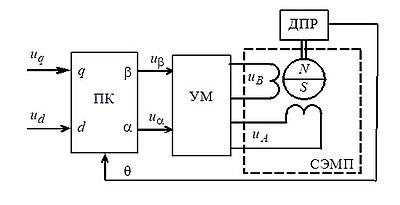 Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока u q {\displaystyle u_{q}} , действие которого аналогично напряжению якоря двигателя постоянного тока, и u d {\displaystyle u_{d}} , аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы u d , u q {\displaystyle u_{d},u_{q}} , представляют собой проекции вектора напряжения управления U y → = { u d , u q } {\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат { d , q } {\displaystyle \{d,q\}} , связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций u d , u q {\displaystyle u_{d},u_{q}} в проекции u α , u β {\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат { α , β } {\displaystyle \{\alpha ,\beta \}} , связанной со статором.
Как правило, в системах управления электропривода задаётся u d = 0 {\displaystyle u_{d}=0} [3], при этом уравнения преобразования координат принимают вид[4]:
u α = − u q ⋅ sin θ , {\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
u β = {\displaystyle u_{\beta }=} u q ⋅ cos θ , {\displaystyle u_{q}\cdot \cos {\theta },}
где θ {\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α {\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ {\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, u q {\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала u q {\displaystyle u_{q}} , формирует гармонические сигналы u α , u β {\displaystyle u_{\alpha },u_{\beta }} , которые усилитель мощности (УМ) преобразует в фазные напряжения u A , u B {\displaystyle u_{A},u_{B}} . Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Достоинства и недостатки
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструкция
Конструктивно современные вентильные привода состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Применение
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
См. также
Ссылки
Литература
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
Примечания
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Что такое BLDC-мотор
BLDC двигатель, он же вентильный двигатель — это бесколлекторный синхронный двигатель постоянного тока на постоянных магнитах. Функцию коллектора в данном случае выполняет электронный контроллер, как если бы двигатель был коллекторный — контроллер переключает обмотки в зависимости от положения ротора с магнитами, определяемого датчиками Холла, установленными в мотор. Если двигатель застопорить, то контроллер будет подавать ток в те две фазы, которые должны его стронуть в нужную сторону. Контроллер не будет переключать фазы, пока ротор стоит. Дополнительно в отличие от механических коллекторов,это обеспечивает работу большого количества магнитных пар,чем может быть обеспечен значительно больший момент.
По сути, BLDC – это коллекторный двигатель с «электронным коллектором», но лишенный его недостатков в виде механического износа щеток и постоянного обслуживания щеточного узла для удаления нагара и загрязнений.
«Вентильный электродвигатель» — это наше, советское название. В зарубежной литературе они называются по другому. Общие аббревиатуры для обозначения синхронных бесколлектроных электродвигателей постоянного тока — это BLDC или PMSM:
- BLDC — Brushless DC electric motor (бесколлекторный электродвигатель постоянного тока).
- PMSM — Permanent Magnet Synchronous Motor (синхронный двигатель с постоянными магнитами).
Конструкция:
В роторе двигателя размещаются постоянные магниты, создающие магнитное поле, которые чередуются + — + -… В зависимости от количества магнитов, двигатель имеет соответствующее количество полюсов. Роторы линейки Golden Motor 3-5-10-20кВт имеют 8 магнитов, т.е. 4 пары магнитов.
Статор сделан из электротехнической стали и медной обмотки, уложенной в пазы сердечника. Количество обмоток определяет количество фаз двигателя. Для вращения необходимы 3 фазы. Обычно ВД трёхфазные, в Golden Motor в т.ч.
BLDC двигатель так же имеет более высокие эксплуатационные характеристики по сравнению с асинхронными двигателями. Он обладает лучшей удельной мощностью (мощность на килограмм массы), лучшим КПД, особенно на низких оборотах и на старте, более простое управление (асинхронным двигателям требуется чистый синус).
Каждому мотору нужен свой управляющий контроллер.
Ниже представлено видео, объясняющая принцип действия:
Вентильный двигатель — Википедия
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесконтактным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2]
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока u q {\displaystyle u_{q}} , действие которого аналогично напряжению якоря двигателя постоянного тока, и u d {\displaystyle u_{d}} , аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы u d , u q {\displaystyle u_{d},u_{q}} , представляют собой проекции вектора напряжения управления U y → = { u d , u q } {\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат { d , q } {\displaystyle \{d,q\}} , связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций u d , u q {\displaystyle u_{d},u_{q}} в проекции u α , u β {\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат { α , β } {\displaystyle \{\alpha ,\beta \}} , связанной со статором.
Как правило, в системах управления электропривода задаётся u d = 0 {\displaystyle u_{d}=0} [3], при этом уравнения преобразования координат принимают вид[4]:
u α = − u q ⋅ sin θ , {\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
u β = {\displaystyle u_{\beta }=} u q ⋅ cos θ , {\displaystyle u_{q}\cdot \cos {\theta },}
где θ {\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α {\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ {\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, u q {\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала u q {\displaystyle u_{q}} , формирует гармонические сигналы u α , u β {\displaystyle u_{\alpha },u_{\beta }} , которые усилитель мощности (УМ) преобразует в фазные напряжения u A , u B {\displaystyle u_{A},u_{B}} . Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Достоинства и недостатки
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструкция
Конструктивно современные вентильные привода состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Применение
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
См. также
Ссылки
Литература
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
Примечания
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Вентильные электродвигатели
Погружные вентильные электродвигатели «Новомет»
Вентильные электродвигатели — это изделия с лучшими энергетическими характеристиками по сравнению с асинхронными. ГК «Новомет» является одним из лидеров отрасли по производству надежных и эффективных погружных вентильных электродвигателей (ПВЭД). Применение вентильного электродвигателя сокращает количество энергии, потребляемой УЭЦН до 15%. А при сочетании вентильных электродвигателей и энергоэффективных насосов, затраты на электроэнергию при эксплуатации УЭЦН снижаются в среднем на 25-30%.
Для производства энергии требуется энергия!
На сегодня наиболее распространенным способом добычи жидкости из скважины является механизированная добыча с применением установок электроцентробежного насоса (УЭЦН). В наше время многие нефтяные и нефтесервисные компании вкладывют миллионы долларов в технологии разведки, бурения и заканчивания скважин, однако не уделяют того же внимания поиску более эффективных способов добычи углеводородов. За последнее десятилетие основной целью ГК «Новомет» является поиск и совершенствование эффективных способов снижения затрат на механизированную добычу.
область применения
- УЭЦН в скважинах типовой конструкции
- Энергоэффективные УЭЦН
- УЭЦН малых габаритов для боковых стволов, технология ColibriESP
- Установки винтовых насосов с нижним приводом
- Установки объемно-роторных насосов
- УЭЦН для подъема геотермальных вод
возможности
Сокращение затрат на электроэнергию при подъеме жидкости из скважины.Применение при различных осложняющих факторах, где применение асинхронного ПЭД затруднительно:
- на скважинах с вязкой нефтью
- с нестабильной подачей (работа в цикличном режиме)
- на малодебитных скважинах
- со сложными условиями эксплуатации (после гидроразрывов и других способов увеличения добычи нефти)
- на скважинах с высокой температурой жидкости (трудноизвлекаемые запасы, геотермальные воды)
особенности
- Широкая линейка типоразмеров, в том числе двигатели сверхмалых габаритов — 55 и 81 мм для использования с установками ColibriESP и SlimlineESP
- Пониженное удельное тепловыделение на единицу мощности

Потери электроэнергии в асинхронных электродвигателях
В серийных асинхронных электродвигателях используется преобразование переменного тока, поданного на обмотки статора, во вращающееся электромагнитное поле. Так как обмотка ротора имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора и создаёт вращательный момент, приводящий в движение ротор. Таким образом, вместо того, чтобы использовать всю потребляемую электроэнергию для создания вращения ротора, около 13% ее тратится на создание и поддержание электромагнитного поля, и в конечном итоге теряется на нагрев.
Прорыв в технологии электроприводов УЭЦН
В отличие от асинхронных двигателей, в вентильных ПЭД для создания вращательного момента вместо обмотки в роторе используются редкоземельные постоянные магниты, а также специальная схема подачи питающего напряжения на обмотку статора. Как результат — повышение КПД и и снижение энергопотребления двигателя примерно на 15%.
Управление работой двигателя осуществляется с помощью электронных ключей (так называемых вентилей), переключение которых выполняется станцией управления по специальной программе. Кроме того, станция управления формирует регулируемую частоту питания двигателя, от которой напрямую зависит его частота вращения и полезная мощность на валу.
Основные элементы вентильного электродвигателя — статор с трехфазной обмоткой, ротор с постоянными магнитами, головка и основание. Магнитопровод статора состоит из листов электротехнической стали с термостойким покрытием, которые запрессованы в трубчатый корпус. Обмотка статора однослойная, протяжная, катушечная, выполнена теплостойким обмоточным проводом по схеме «звезда» с выводом общей точки для системы контроля параметров установки. Ротор с постоянными магнитами установлен в расточке статора на подшипниках скольжения.

Низкооборотные (100-1500 об/мин) двигатели для привода винтовых и объемно-роторных насосов
|
Наружный диаметр двигателя |
Скорость вращения |
Номинальная мощность одной секции |
|
117 мм |
100-1500 об/мин |
до 40 кВт при 500 об/мин |
|
4,60 дюйма |
Вентильные двигатели на 3600 об/мин для энергоэффективных и серийных насосных систем
|
Наружный диаметр двигателя |
Скорость вращения |
Номинальная мощность одной секции |
|
103 мм |
1000-4200 об/мин |
6-200 кВт (@100 Гц) |
|
4,06 дюйма |
||
|
117 мм |
1000-4200 об/мин |
12-310 кВт (@100 Гц) |
|
4,60 дюйма |
||
|
130 мм |
1000-4200 об/мин |
32-300 кВт (@100 Гц) |
|
5,12 дюйма |
||
|
185 мм |
1000-4200 об/мин |
60-800 кВт (@100 Гц) |
|
7,44 дюйма |
Вентильные двигатели на 6000 об/мин для энергоэффективных насосных систем
|
Наружный диаметр двигателя |
Скорость вращения |
Номинальная мощность одной секции |
|
55 мм |
8500 об/мин |
до 35 кВт (@283 Гц) |
|
2,17 дюйма |
||
|
81 мм |
1000-6000 об/мин |
4-90 кВт (@200 Гц) |
|
3,19 дюйма |
||
|
103 мм |
1000-6000 об/мин |
12-280 кВт (@200 Гц) |
|
4,06 дюйма |
||
|
117 мм |
1000-6000 об/мин |
12-280 кВт (@200 Гц) |
|
4,60 дюйма |
||
|
130 мм |
1000-6000 об/мин |
60-644 кВт (@200 Гц) |
|
5,12 дюйма |
Секционные двигатели на 6000 об/мин
|
Наружный диаметр двигателя |
Скорость вращения |
Номинальная мощность одной секции |
|
55 мм |
8500 об/мин |
до 70 кВт (@283 Гц) |
|
2,17 дюйма |
||
|
81 мм |
1000-6000 об/мин |
100-200 кВт (@200 Гц) |
|
3,19 дюйма |
||
|
130 мм |
4500 об/мин |
до 770 кВт (@150 Гц) |
|
5,12 дюйма |
Высокооборотные или низкооборотные электродвигатели
Все вентильные двигатели «Новомет» в сочетании с универсальными станциями управления с ЧРП обеспечивают широкий диапазон скоростей вращения, при сохранении низкого уровня энергопотребления во всем диапазоне. В результате, мы можем предложить нашим заказчикам линейку высокооборотных электродвигателей (от 3000 до 6000 об/мин), а также низкооборотные двигатели (от 100 до 1500 об/мин) для использования совместно с насосами объемного типа в скважинах с вязкими жидкостями или с малой подачей.
Преимущества вентильных двигателей
По сравнению с асинхронными вентильные двигатели:
- Сокращают потребление энергии до 15%, а в паре с энергоэффективным насосами — до 30%.
- Улучшают производительность ЭЦН в широком диапазоне подач и напоров.
- Поддерживают стабильную работу ЭЦН, сохраняя постоянный крутящий момент на валу независимо от скорости вращения.
- Обеспечивает большую наработку за счет снижения нагрева оборудования.
- Предоставляют до 2-х раз большую мощность в одной секции.
- Имеют высокую мощность в секции, поэтому нет необходимости в применении секционных двигателей
Типоразмеры и особенности применения
Вентильные двигатели предназначены для работы в составе энергоэффективных установок PowerSaveESP, а также установок малого диаметра — SlimLineESP — установок, имеющих меньший внешний диаметр по сравнению с аналогами. Они идеально подходят для работы в горизонтальных скважинах и скважинами с высокой степенью искривления ствола. В общем случае, область применения вентильных электродвигателей включает:
- Установки ЭЦН как для стандартных скважин, так и скважин с осложнениями.
- Установки ЭЦН в широком диапазоне подач и напоров.
- Установки винтовых насосов с нижним приводом, установки объемно-роторных насосов
- Установки ЭЦН для подъема геотермальных вод
Наши вентильные электродвигатели доступны в габаритах от 55 мм до 188 мм. Мы предлагаем самые компактные модели вентильных двигателей на рынке, которые идеально подходят для малогабаритных УЭЦН и для мобильного комплекса Colibri ESP — установки, монтируемой на грузонесущем кабеле внутри НКТ.
Вентильный двигатель — Википедия с видео // WIKI 2
Рис. 1. Принцип работы трёхфазного вентильного двигателя
Вентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щёточно-коллекторный узел (ЩКУ) заменён полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще, чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесколлекторным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Энциклопедичный YouTube
1/1
Просмотров:79 150
✪ Принцип работы бесщеточного двигателя постоянного тока
Содержание
Описание и принцип работы[2]
 Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока u q {\displaystyle u_{q}} , действие которого аналогично напряжению якоря двигателя постоянного тока, и u d {\displaystyle u_{d}} , аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы u d , u q {\displaystyle u_{d},u_{q}} , представляют собой проекции вектора напряжения управления U y → = { u d , u q } {\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат { d , q } {\displaystyle \{d,q\}} , связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций u d , u q {\displaystyle u_{d},u_{q}} в проекции u α , u β {\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат { α , β } {\displaystyle \{\alpha ,\beta \}} , связанной со статором.
Как правило, в системах управления электропривода задаётся u d = 0 {\displaystyle u_{d}=0} [3], при этом уравнения преобразования координат принимают вид[4]:
u α = − u q ⋅ sin θ , {\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
u β = {\displaystyle u_{\beta }=} u q ⋅ cos θ , {\displaystyle u_{q}\cdot \cos {\theta },}
где θ {\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α {\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ {\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, u q {\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала u q {\displaystyle u_{q}} , формирует гармонические сигналы u α , u β {\displaystyle u_{\alpha },u_{\beta }} , которые усилитель мощности (УМ) преобразует в фазные напряжения u A , u B {\displaystyle u_{A},u_{B}} . Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Достоинства и недостатки
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструкция
Конструктивно современные вентильные приводы состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Применение
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
См. также
Ссылки
Литература
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
Примечания
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
 Эта страница в последний раз была отредактирована 5 июля 2020 в 05:00.
Эта страница в последний раз была отредактирована 5 июля 2020 в 05:00.Вентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесконтактным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2]
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока u q {\displaystyle u_{q}} , действие которого аналогично напряжению якоря двигателя постоянного тока, и u d {\displaystyle u_{d}} , аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы u d , u q {\displaystyle u_{d},u_{q}} , представляют собой проекции вектора напряжения управления U y → = { u d , u q } {\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат { d , q } {\displaystyle \{d,q\}} , связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций u d , u q {\displaystyle u_{d},u_{q}} в проекции u α , u β {\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат { α , β } {\displaystyle \{\alpha ,\beta \}} , связанной со статором.
Как правило, в системах управления электропривода задаётся u d = 0 {\displaystyle u_{d}=0} [3], при этом уравнения преобразования координат принимают вид[4]:
u α = − u q ⋅ sin θ , {\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
u β = {\displaystyle u_{\beta }=} u q ⋅ cos θ , {\displaystyle u_{q}\cdot \cos {\theta },}
где θ {\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α {\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ {\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, u q {\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала u q {\displaystyle u_{q}} , формирует гармонические сигналы u α , u β {\displaystyle u_{\alpha },u_{\beta }} , которые усилитель мощности (УМ) преобразует в фазные напряжения u A , u B {\displaystyle u_{A},u_{B}} . Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Достоинства и недостатки
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструкция
Конструктивно современные вентильные привода состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Применение
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
См. также
Ссылки
Литература
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
Примечания
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Кристофер Ящольт, Yaskawa America Inc. 31 января 2017 г.
 Управление скоростью двигателей переменного тока в большинстве случаев осуществляется с помощью частотно-регулируемого привода (ЧРП). Хотя многие сценарии предусматривают использование частотно-регулируемых приводов с асинхронными двигателями с обмотками статора для генерации вращающегося магнитного поля, они также могут обеспечить точное управление скоростью с использованием датчиков обратной связи по скорости или положению в качестве эталона для ЧРП.
Управление скоростью двигателей переменного тока в большинстве случаев осуществляется с помощью частотно-регулируемого привода (ЧРП). Хотя многие сценарии предусматривают использование частотно-регулируемых приводов с асинхронными двигателями с обмотками статора для генерации вращающегося магнитного поля, они также могут обеспечить точное управление скоростью с использованием датчиков обратной связи по скорости или положению в качестве эталона для ЧРП.
В некоторых ситуациях можно получить сравнительно точное регулирование скорости без необходимости использования датчиков обратной связи. Это стало возможным благодаря использованию двигателя с постоянными магнитами (PM) и процесса, называемого «метод ввода высокочастотного сигнала».
Индукционные машины
Индукционная машина переменного тока (IM) также обычно называется двигателем переменного тока. Вращающееся поле создается обмоткой статора. Вращающееся поле индуцирует ток в стержнях ротора.Генерация тока требует разности скоростей между ротором и магнитным полем. Взаимодействие между полем и током создает движущую силу. Поэтому асинхронные машины переменного тока являются преобладающим двигателем, управляемым приводами с регулируемой скоростью.
PM двигатели
Двигатель с постоянным магнитом — это двигатель переменного тока, в котором используются магниты, встроенные или прикрепленные к поверхности ротора двигателя. Магниты используются для генерации постоянного магнитного потока двигателя вместо того, чтобы требовать, чтобы поле статора генерировало магнитное поле путем соединения с ротором, как в случае с асинхронным двигателем.Четвертый двигатель, известный как двигатель с линейным запуском (LSPM), включает в себя характеристики обоих двигателей. Двигатель LSPM включает в себя магниты двигателя PM в роторе и стержни ротора двигателя с короткозамкнутым ротором, чтобы максимизировать крутящий момент и эффективность (см. Таблицу 1).

Флюс, флюсовая связь и магнитный поток
Чтобы понять работу двигателей с постоянными магнитами, важно сначала понять понятия магнитного потока, связи потока и магнитного потока.
Поток: Поток тока через проводник создает магнитное поле.Поток определяет скорость потока имущества на единицу площади. Ток потока — это скорость тока, протекающего через данную площадь поперечного сечения проводника.
Потоковая связь: Потоковая связь возникает, когда магнитное поле взаимодействует с материалом, например, что происходит, когда магнитное поле проходит через катушку с проволокой. Связь потока определяется числом обмоток и потоком, где ϕ используется для указания мгновенного значения изменяющегося во времени потока. Поток связи определяется следующим уравнением:

Магнитный поток: Магнитный поток определяется как скорость магнитного поля, протекающего через площадь поперечного сечения данного проводника.Поле магнитного потока создается постоянным магнитом внутри или на поверхности двигателя с постоянным магнитом.
Индуктор: Индуктор — это элемент схемы, который состоит из проводящего провода, обычно в форме катушки. Проводник, несущий постоянный ток, будет генерировать постоянное магнитное поле. Можно показать, что магнитное поле и ток, который его вызвал, линейно связаны. Изменение магнитного поля будет вызывать напряжение в соседнем проводнике, пропорциональное скорости изменения тока, создавшего магнитное поле.Напряжение в проводнике определяется по следующему уравнению:

Индуктивность: Индуктивность (L) — это константа пропорциональности, которая определяет соотношение между напряжениями, вызванными скоростью изменения тока, создавшего магнитное поле. Проще говоря, индуктивность — это магнитная связь на единицу тока. Должно быть ясно, что индуктивность является пассивным элементом и является чисто геометрическим свойством.Индуктивность измеряется в Генри (H) или Веб-витках на ампер.
Ось d и ось q: В геометрическом выражении оси «d» и «q» представляют собой однофазные представления потока, вносимые тремя отдельными величинами синусоидальной фазы с одинаковой угловой скоростью. Ось d, также известная как прямая ось, является осью, по которой поток создается обмоткой возбуждения. Ось q или квадратурная ось — это ось, на которой создается крутящий момент. По соглашению, квадратурная ось всегда будет вести прямую ось электрически на 90 градусов.Проще говоря, ось d является основным направлением потока, а ось q является основным направлением создания крутящего момента.
Магнитная проницаемость: В электромагнетизме проницаемость — это мера способности материала поддерживать формирование магнитного поля внутри себя. Следовательно, это степень намагниченности, которую материал получает в ответ на приложенное магнитное поле.
PM эквивалентная схема двигателя: Двигатель с постоянным магнитом может быть представлен в нескольких различных моделях двигателей.Одним из наиболее распространенных методов является модель двигателя d-q.
PM двигатель индуктивность по оси d и по оси q: Индуктивности по оси d и оси q — это индуктивности, измеренные при прохождении пути потока через ротор относительно магнитного полюса. Индуктивность по оси d — это индуктивность, измеряемая при прохождении потока через магнитные полюса. Индуктивность по оси q является мерой индуктивности, когда поток проходит между магнитными полюсами.
В индукционной машине связь потока ротора будет одинаковой между осью d и осью q.Однако в машине с постоянными магнитами магнит уменьшает доступное железо для флюсовой связи. Проницаемость магнита близка к воздухопроницаемости. Следовательно, магнит можно рассматривать как воздушный зазор. Магнит находится на пути потока, поскольку он проходит через ось d. Путь потока, проходящий через ось q, не пересекает магнит. Следовательно, большее количество железа может быть связано с траекторией потока по оси q, что приводит к большей индуктивности. Двигатель со встроенным магнитом будет иметь большую индуктивность по оси q, чем индуктивность по оси d.Двигатель с магнитами для поверхностного монтажа будет иметь почти одинаковые индуктивности по осям q и d, поскольку магниты находятся за пределами ротора и не ограничивают количество железа, связанного полем статора.
Магнитная значимость: Значимость или значимость — это состояние или качество, по которым что-то выделяется по сравнению с соседями. Магнитная зависимость описывает взаимосвязь между индуктивностью основного потока ротора (ось d) и индуктивностью основного крутящего момента (ось q).Магнитная значимость варьируется в зависимости от положения ротора относительно поля статора, где максимальная значимость возникает при 90 градусах по электрической оси от оси основного потока (ось d) (см. Рисунок 1).
Ток возбуждения: Ток возбуждения — это «ток в обмотках статора, необходимый для создания магнитного потока в сердечнике ротора». Машины с постоянными магнитами не требуют тока возбуждения в обмотке статора, потому что магниты двигателя PM уже генерируют постоянное магнитное поле.
Вторичный ток: Вторичный ток, также известный как «ток, создающий крутящий момент», — это ток, необходимый для создания крутящего момента двигателя. В машине с постоянными магнитами токи, создающие крутящий момент, составляют большую часть потребляемого тока.
Ток ввода: В отличие от усилителя и сервопривода, предназначенного для управления движением, обычный ЧРП не имеет информации о положении магнитного полюса ротора двигателя.Без знания положения магнитного полюса в статоре невозможно создать поле для максимизации крутящего момента. Следовательно, ЧРП обладает способностью обеспечивать постоянное напряжение для фиксации магнитного поля в известном положении. Потребляемый ток, необходимый для затягивания ротора, называется «током втягивания».
Высокочастотный впрыск: Высокочастотный впрыск — это методология инвертора, используемая для определения положения магнитного полюса двигателя с постоянными магнитами. Способ начинается с подачи инвертором высокочастотного низковольтного сигнала в двигатель по произвольной оси.Затем инвертор поворачивает угол возбуждения и контролирует ток.


В зависимости от угла впрыска импеданс ротора изменяется. Полное сопротивление клеммы электродвигателя внутреннего постоянного магнита (IPM) уменьшается, когда ось ввода высокочастотного сигнала и ось магнитного полюса (ось d) совмещены, то есть при 0 град. Импеданс максимален при ± 90 град. Используя эту характеристику, привод может определять положение ротора без импульсных датчиков путем подачи высокочастотного переменного напряжения / тока на двигатель IPM.Кроме того, метод ввода высокочастотного сигнала может использоваться для определения скорости в области низких скоростей, где обычно очень сложно контролировать крутящий момент при полной нагрузке, поскольку уровень напряжения обратной ЭДС двигателя слишком низок.
Форма волны обратной ЭДС
ПротивоЭДС — это сокращение от обратной электродвижущей силы, но также известно как противоэлектродвижущая сила. Противоэлектродвижущая сила — это напряжение, которое возникает в электродвигателях при относительном движении между обмотками статора и магнитным полем ротора.Геометрические свойства ротора будут определять форму волны обратной ЭДС. Эти сигналы могут быть синусоидальными, трапециевидными, треугольными или что-то среднее между ними.
Как индукционные, так и PM машины генерируют сигналы обратной ЭДС. В индукционной машине форма обратной ЭДС затухает, поскольку остаточное поле ротора медленно затухает из-за отсутствия поля статора. Тем не менее, с машиной PM, ротор генерирует свое собственное магнитное поле. Следовательно, напряжение может быть индуцировано в обмотках статора, когда ротор находится в движении.Напряжение противо-ЭДС будет расти линейно со скоростью и является решающим фактором при определении максимальной рабочей скорости.
Понимание PM машины крутящего момента
Крутящий момент электрической машины можно разделить на две составляющие: магнитный момент и момент сопротивления. Момент реактивного сопротивления — это «сила, действующая на магнитный материал, которая стремится совмещаться с основным магнитным потоком, чтобы минимизировать сопротивление». Другими словами, реактивный крутящий момент — это крутящий момент, создаваемый выравниванием вала ротора с полем потока статора.Магнитный крутящий момент — это «крутящий момент, создаваемый взаимодействием между магнитным полем магнита и током в обмотке статора».
Крутящий момент реактивного сопротивления: Крутящий момент реактивного сопротивления относится к крутящему моменту, возникающему при выравнивании ротора, который возникает, когда магнитное поле создает желательный прямой поток от северного полюса статора к южному полюсу статора.
Магнитный момент: Постоянные магниты создают поле потока в роторе.Статор генерирует поле, которое взаимодействует с магнитным полем ротора. Изменение положения поля статора относительно поля ротора вызывает смещение ротора. Сдвиг из-за этого взаимодействия является магнитным моментом.
SPM против IPM
 motors. The magnets of the surface-mounted permanent magnet (SPM) motor, shown on the left, are attached on the surface of the rotor, whereas those of the internal permanent magnet (IPM) motor are buried inside. Courtesy: Yaskawa America Inc.") Двигатель с постоянным магнитом можно разделить на две основные категории: наземные двигатели с постоянными магнитами (SPM) и внутренние двигатели с постоянными магнитами (IPM) (см. Рисунок 3). Ни один тип конструкции двигателя не содержит стержней ротора. Оба типа генерируют магнитный поток постоянными магнитами, прикрепленными к ротору или внутри него.
Двигатель с постоянным магнитом можно разделить на две основные категории: наземные двигатели с постоянными магнитами (SPM) и внутренние двигатели с постоянными магнитами (IPM) (см. Рисунок 3). Ни один тип конструкции двигателя не содержит стержней ротора. Оба типа генерируют магнитный поток постоянными магнитами, прикрепленными к ротору или внутри него.
имеют магниты, прикрепленные к внешней поверхности ротора. Из-за этого механического монтажа их механическая прочность ниже, чем у двигателей IPM. Ослабленная механическая прочность ограничивает максимальную безопасную механическую скорость двигателя. Кроме того, эти двигатели имеют очень ограниченную магнитную значимость (L d ≈ L q ). Измеренные значения индуктивности на клеммах ротора не зависят от положения ротора. Из-за коэффициента значимости, близкого к единице, конструкции двигателей SPM в значительной степени, если не полностью, используют магнитную составляющую крутящего момента для создания крутящего момента.
ДвигателиIPM имеют постоянный магнит, встроенный в сам ротор. В отличие от своих аналогов SPM, расположение постоянных магнитов делает двигатели IPM очень механически надежными и пригодными для работы на очень высоких скоростях. Эти двигатели также определяются их относительным высоким коэффициентом магнитного сопротивления (L q > L d ). Благодаря своей магнитной значимости, двигатель IPM способен генерировать крутящий момент, используя преимущества как магнитного, так и реактивного крутящего момента двигателя (см. Рисунок 4).
 and interior permanent magnet motors (IPM). Courtesy: Yaskawa America Inc.")
PM моторные конструкции
Моторные конструкцииPM можно разделить на две категории: внутренние и наружные. Каждая категория имеет свое подмножество категорий. Поверхностный двигатель с постоянными магнитами может иметь свои магниты на поверхности ротора или вставляться в него, чтобы повысить надежность конструкции. Внутреннее расположение и конструкция двигателя с постоянными магнитами могут сильно различаться. Магниты двигателя IPM могут быть вставлены в виде большого блока или расположены в шахматном порядке по мере приближения к сердечнику.Другой метод заключается в том, чтобы они были встроены в шаблон спиц.
PM изменение индуктивности двигателя с нагрузкой
Только такой большой поток может быть связан с железкой для создания крутящего момента. В конце концов, железо будет насыщаться и больше не позволит флюсу связываться. Результатом является уменьшение индуктивности пути, пройденного магнитным полем. В машине с постоянными магнитами значения индуктивности по оси d и по оси q будут уменьшаться с увеличением тока нагрузки.
Индуктивности осей d и q двигателя SPM практически идентичны.Поскольку магнит находится за пределами ротора, индуктивность оси q будет падать с той же скоростью, что и индуктивность оси d. Однако индуктивность двигателя IPM будет уменьшаться по-разному. Опять же, индуктивность по оси d, естественно, ниже, потому что магнит находится на пути потока и не генерирует индуктивное свойство. Следовательно, в оси d меньше железа для насыщения, что приводит к значительно меньшему уменьшению потока по отношению к оси q.
Ослабление потока / усиление двигателей с постоянными магнитами
Поток в двигателе с постоянными магнитами генерируется магнитами.Поле потока следует определенному пути, который можно усилить или противопоставить. Увеличение или усиление поля магнитного потока позволит двигателю временно увеличить крутящий момент. Противодействие магнитному полю сведет на нет существующее магнитное поле двигателя. Уменьшенное магнитное поле ограничит производство крутящего момента, но уменьшит напряжение обратной ЭДС. Пониженное напряжение обратной эдс освобождает напряжение, чтобы заставить двигатель работать на более высоких выходных скоростях. Оба типа работы требуют дополнительного тока двигателя. Направление тока двигателя через ось d, обеспечиваемое контроллером двигателя, определяет желаемый эффект.
Угол возбуждения
Угол возбуждения — это угол, под которым векторная сумма сигналов d-оси и q-оси возбуждается к двигателю относительно оси d. Ось d всегда рассматривается там, где существует магнит. Максимальный магнитный поток достигается на оси q, которая составляет 90 электрических градусов от оси d. Поэтому в большинстве эталонов угла возбуждения уже учитывается разница в 90 градусов от оси d к оси q.
Фазовый угол и крутящий момент
Магнитный крутящий момент увеличивается, когда поле статора возбуждает ротор двигателя на 90 град. От оси d (положение магнита двигателя).Момент неохотности следует по другому пути и максимизируется на 45 градусов ниже оси q. Максимальный магнитный момент использует как сопротивление двигателя, так и магнитные моменты. Сдвиг дальше от оси q уменьшает магнитный момент, но значительно превосходит усиление реактивного крутящего момента. Максимальный суммарный магнитный и реактивный крутящий момент возникает около 45 электрических градусов от оси q, но точный угол будет зависеть от характеристик двигателя с постоянными магнитами.
IPM плотность мощности двигателя
Мощность двигателя двигателя с постоянными магнитами зависит от конфигурации магнитов двигателя и результирующей значимости двигателя.Двигатели с высоким коэффициентом значимости (Lq> Ld) могут повысить КПД двигателя и выработку крутящего момента за счет включения реактивного крутящего момента двигателя. Инвертор может использоваться для изменения угла возбуждения относительно оси d, чтобы максимизировать как реактивный крутящий момент, так и магнитный крутящий момент двигателя.
PM мотор-магнит типа
В настоящее время для электродвигателей используется несколько типов материалов с постоянными магнитами. Каждый вид металла имеет свои преимущества и недостатки.

Размагничивание постоянным магнитом
Постоянные магниты вряд ли являются постоянными и имеют ограниченные возможности. Определенные силы могут быть приложены к этим материалам, чтобы размагнитить их. Другими словами, можно удалить магнитные свойства материала с постоянными магнитами. Постоянное магнитное вещество может размагничиваться, если материал подвергается значительному напряжению, может достигать значительных температур или подвергается воздействию значительных электрических помех.
Во-первых, натяжение постоянного магнита обычно осуществляется физическими средствами. Магнитный материал может размагничиваться, если не ослабляться, если он испытывает сильные удары / падения. Ферромагнитный материал обладает присущим магнитным свойством. Однако эти магнитные свойства могут излучать в любом множестве направлений. Одним из способов намагничивания ферромагнитных материалов является применение сильного магнитного поля к материалу для выравнивания его магнитных диполей. Выравнивание этих диполей заставляет магнитное поле материала в определенную ванну.Сильное воздействие может устранить атомное выравнивание магнитных доменов материала, что ослабляет напряженность предполагаемого магнитного поля.
Во-вторых, температура также может влиять на постоянный магнит. Температуры заставляют магнитные частицы в постоянном магните возбуждаться. Магнитные диполи обладают способностью выдерживать некоторое количество термического перемешивания. Однако длительные периоды перемешивания могут ослабить силу магнита, даже если хранить его при комнатной температуре. Кроме того, все магнитные материалы имеют порог, известный как «температура Кюри», который является порогом, который определяет температуру, при которой тепловое перемешивание заставляет материал полностью размагничиваться.Такие термины, как коэрцитивность и удерживаемость, используются для определения способности удержания прочности магнитного материала.
Наконец, большие электрические помехи могут вызвать размагничивание постоянного магнита. Эти электрические возмущения могут происходить из материала, взаимодействующего с большим магнитным полем, или если через материал проходит большой ток. Точно так же сильное магнитное поле или ток можно использовать для выравнивания магнитных диполей материала, другое сильное магнитное поле или ток, приложенный к полю, генерируемому постоянным магнитом, может привести к размагничиванию.
Самозондирование по сравнению с замкнутым циклом
Последние достижения в области приводных технологий позволяют стандартным приводам переменного тока «самостоятельно обнаруживать» и отслеживать положение магнита двигателя. Система с обратной связью обычно использует канал с z-импульсом для оптимизации производительности. Благодаря определенным процедурам привод знает точное положение магнита двигателя, отслеживая каналы A / B и исправляя ошибки с помощью z-канала. Знание точного положения магнита позволяет получить оптимальный крутящий момент, обеспечивающий оптимальную эффективность.
Серводвигатели
Серводвигатели— это двигатели с постоянными магнитами, используемые для управления движением. Как правило, в конструкции внутреннего / внутреннего двигателя с постоянными магнитами эти двигатели соединены с определенным усилителем как часть согласованного набора для максимизации производительности. Усилитель был точно настроен на двигатель PM для достижения оптимальной производительности его производителем. Конфигурация усилителя движения / сервопривода обычно использует обратную связь двигателя, которая также обеспечивает положение магнитного полюса и обратную связь по скорости.
Кристофер Ящольт — специалист по управлению приводами в Yaskawa America Inc. Он имеет более чем девятилетний опыт управления движением. Помимо своего нынешнего звания, Ящольт работал инженером технической поддержки и прикладным инженером. Он имеет степень бакалавра в Университете Северного Иллинойса, ДеКалб, штат Иллинойс,
Эта статья появляется в приложении Прикладная автоматизация для Control Engineering
и Plant Engineering.
Электродвигатель | Британика
Самый простой тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы утюга статора. Эти обмотки могут быть подключены либо в конфигурации «вай», обычно без внешнего подключения к нейтральной точке, либо в конфигурации «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах вокруг поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим торцевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя. Encyclopædia Britannica, Inc.Основу работы асинхронного двигателя можно разработать, предположив сначала, что обмотки статора подключены к трехфазному источнику электропитания и что набор из трех синусоидальных токов формы, показанной на рисунке, течет в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений в цикле.Для простоты показана только центральная петля проводника для каждой фазовой обмотки. В момент времени t 1 на рисунке ток в фазе a является максимально положительным, в то время как в фазах b и c половина этого значения отрицательна. В результате создается магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным наружным значением вверху и максимальным внутренним значением внизу. В момент времени т 2 на рисунке (т.е.то есть, одна шестая часть цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a является половинным положительным значением. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, объединенный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, заключается в создании вращающегося магнитного поля с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите эксклюзивный доступ к контенту из нашего первого издания 1768 года с вашей подпиской. Подпишитесь сегодняВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом, пропорциональном величине и скорости поля относительно проводников.Поскольку проводники ротора закорачиваются вместе на каждом конце, эффект будет вызывать токи в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. Структура токов ротора для момента т 1 на рисунке показана на этом рисунке. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки (т.е.крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент действует для ускорения ротора и вращения механической нагрузки. Когда скорость вращения ротора увеличивается, его скорость относительно скорости вращения поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому на этой скорости нагрузкой, при этом избыточный крутящий момент не доступен для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, возникающие в короткозамкнутых проводниках ротора. Encyclopædia Britannica, Inc.Механическая выходная мощность должна обеспечиваться электрической входной мощностью. Исходные токи статора, показанные на рисунке, достаточны для создания вращающегося магнитного поля. Для поддержания этого вращающегося поля в присутствии токов ротора на фигуре необходимо, чтобы обмотки статора передавали дополнительный компонент синусоидального тока такой величины и фазы, чтобы исключить влияние магнитного поля, которое могло бы возникнуть в противном случае. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей для создания магнитного поля и другой синусоиды, ведущую первую на четверть цикла или на 90 °, чтобы обеспечить требуемую электрическую мощность. Второй или силовой компонент тока находится в фазе с напряжением, приложенным к статору, тогда как первый или намагничивающий компонент отстает от приложенного напряжения на четверть цикла, или на 90 °. При номинальной нагрузке этот намагничивающий компонент обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными напрямую к трехфазному источнику постоянного напряжения и частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между линиями для двигателей относительно низкой мощности (например, от 0,5 до 50 кВт) до примерно 15 кВ от линий к линии для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения в сопротивлении обмотки статора, напряжение питания соответствует скорости изменения магнитного потока в статоре машины.Таким образом, при питании с постоянной частотой и постоянном напряжении величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент приблизительно пропорционален составляющей мощности тока питания.
При использовании асинхронного двигателя, показанного на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника питания 60 Гц полевая скорость составляет 60 оборотов в секунду, или 3600 в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость, как правило, на 0,5–5 процентов ниже скорости поля (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости можно получить с помощью источника постоянной частоты, построив машину с большим числом пар магнитных полюсов, в отличие от двухполюсной конструкции на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту составляют 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данная железная рама может быть намотана для любого из нескольких возможных чисел пар полюсов с помощью катушек, которые охватывают угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимому току катушки. Таким образом, номинальная мощность для рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна числу пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
,Motors с постоянными магнитами
Novomet двигатель с постоянными магнитами
Наш двигатель с постоянными магнитами (PMM) лидирует в отрасли по эффективности и надежности. В среднем это снижает энергопотребление электрических погружных насосов (ESP) на 15% по сравнению с асинхронными двигателями переменного тока. В сочетании с нашими энергосберегающими ступенями насоса операторы обычно видят, что их счета за электроэнергию снижаются на 25–30% и более. Наши двигатели с постоянными магнитами в настоящее время являются наиболее распространенными двигателями с постоянными магнитами ESP, установленными в Северной и Южной Америке.
Требуется энергия для производства энергии
ESPявляются лидером в обеспечении надежного подъема углеводородов в широком диапазоне условий и областей применения. Поскольку компании продолжают вкладывать миллионы долларов в технологии разведки, бурения и заканчивания, они не уделяют такого же внимания поиску более эффективных способов добычи углеводородов. За последнее десятилетие Novomet заставила наш бизнес находить более эффективные способы подъема широкого спектра жидкостей, эффективно снижая стоимость добычи углеводородов.
заявки
- ESP для обычных и нетрадиционных скважин
- Широкий диапазон потоков и давлений
- Небольшие скважины и боковые стволы
- Системы ESPCP и RDCP с забойными скважинами
- Геотермальные насосные системы
возможности
- Снижает энергопотребление ESP
- Продлевает срок службы за счет снижения общего тепла системы
- Превосходит асинхронные двигатели в тяжелых условиях, включая вязкое масло, циклические ESP, граничные скважины, трещиноватые скважины и высокие температуры жидкости
функции
- Мы предлагаем самый маленький из доступных на рынке PMM, что делает его особенно выгодным в системах SlimLine ESP и Colibri Rigless ESP .
- Уменьшает тепловыделение на единицу мощности
Потери электроэнергии в асинхронных асинхронных двигателях
Стандартные асинхронные двигатели (также называемые асинхронными двигателями ESP) преобразуют трехфазный ток в электромагнитное поле, которое вращается для создания вращения.Эта энергия вращения приводит ротор в ESP для подъема жидкости из резервуара на поверхность. Все асинхронные двигатели переменного тока потребляют электроэнергию для создания электромагнитного поля, которое делает возможным вращение. Таким образом, вместо преобразования всего получаемого ими электричества в крутящий момент, где-то около 13% этой энергии используется для создания и поддержания электромагнитного поля, которое обычно теряется на тепло.
Прорыв PMM
В отличие от стандартных асинхронных двигателей, PMM использует редкоземельные магниты и специальные схемы для подачи напряжения на обмотку статора, устанавливая крутящий момент двигателя, необходимый для вращения с меньшим количеством электричества.Такая конструкция повышает КПД двигателя и снижает энергопотребление в среднем на 15%.
PMM управляется с помощью проприетарного программного обеспечения с поверхности, которая переключает электронные ключи или клапаны на двигателе. Привод с регулируемой скоростью (VSD) на поверхности позволяет регулировать частоту, поэтому скорость двигателя и полезную мощность на валу можно регулировать по мере необходимости для повышения эффективности.
Двигатель включает в себя статор с трехфазной обмоткой, ротор с постоянными магнитами, головку и основание.Магнитная цепь статора состоит из листов электротехнической стали с термостойким покрытием, которые запрессованы в трубчатый корпус. Обмотка статора представляет собой однослойную, продолжительную катушку, изготовленную из термостойкой обмоточной проволоки, которая намотана в виде звезды, чтобы обеспечить общую контрольную точку для настроек системы. Ротор с постоянными магнитами установлен в отверстии статора на подшипниках скольжения.
Низкоскоростной (100 — 1500 об / мин) PMM для PCP и роторного поршневого насоса Novomet
Двигатель ОД | Диапазон скоростей | Номинальная мощность в одной секции |
117 мм | 100-1500 об / мин | до 40 кВт (при 58 Гц) 500 об / мин |
4,60 в | до 54 л.с. (@ 58 Гц) |
PMM, рассчитанный на 3000 об / мин для систем ESP (обычный + PowerSave)
Двигатель ОД | Диапазон скоростей | Номинальная мощность в одной секции |
103 мм | 1000-4200 об / мин | 6-200 кВт (при 100 Гц) |
4,06 в | 10 — 320 л.с. (при 120 Гц) | |
117 мм | 1000-4200 об / мин | 12-310 кВт (при 100 Гц) |
4,60 в | 19-500 л.с. (при 120 Гц) | |
130 мм | 1000-4200 об / мин | 32-300 кВт (при 100 Гц) |
5,12 в | 50-480 л.с. (при 120 Гц) | |
185 мм | 1000-4200 об / мин | 60-800 кВт (при 100 Гц) |
7,44 в | 96-1285 л.с. (при 120 Гц) |
PMM, рассчитанный на 6000 об / мин для систем ESP (обычный + PowerSave)
Двигатель ОД | Диапазон скоростей | Номинальная мощность в одной секции |
55 мм | 8500 об / мин | До 35 кВт (при 283 Гц) |
2,17 в | До 47 л.с. (@ 283 Гц) | |
81 мм | 1000-6000 об / мин | 4-90 кВт (при 200 Гц) |
3,19 в | 5-120 л.с. (при 200 Гц) | |
103 мм | 1000-6000 об / мин | 12-280 кВт (при 200 Гц) |
4,06 в | 16-375 л.с. (при 200 Гц) | |
117 мм | 1000-6000 об / мин | 12-280 кВт (при 200 Гц) |
4,60 в | 14-375 л.с. (при 200 Гц) | |
130 мм | 1000-6000 об / мин | 60-644 кВт (при 200 Гц) |
5,12 в | 80-863 л.с. (при 200 Гц) |
Тандем PMM, рассчитанный на 6000 об / мин для систем ESP (обычный + PowerSave)
Двигатель ОД | Диапазон скоростей | Номинальная мощность в одной секции |
55 мм | 8500 об / мин | До 70 кВт (при 283 Гц) |
2,17 в | До 94 л.с. (@ 283 Гц) | |
81 мм | 1000-6000 об / мин | 100-200 кВт (при 200 Гц) |
3,19 в | 135-270 л.с. (при 200 Гц) | |
130 мм | 4500 об / мин | От до 770 кВт (при 150 Гц) |
5,12 в | до 1030 л.с. (при 150 Гц) |
Высокоскоростная и низкоскоростная гибкость
Наши приводы с регулируемой скоростью используют уникальную схему напряжения для обеспечения широкого диапазона скоростей вращения при сохранении постоянного потребления электроэнергии.В результате получается двигатель, который невероятно эффективен при работе на обычных скоростях (от 500 до 6000 об / мин) и может быть легко адаптирован к низким скоростям (от 100 до 500 об / мин) для использования с скважинами с низким расходом и жидкостями с высокой вязкостью. Мы также адаптировали PMM для работы с насосами с прогрессивной полостью (PCP) для создания высоконадежного ESPCP с забойным приводом.
Преимущества PMM
По сравнению со стандартными асинхронными асинхронными двигателями, PMM:
- Снижает энергопотребление в одиночку на 15% и до 30% и более в сочетании с энергоэффективными насосами
- Повышает производительность ESP в широком диапазоне скоростей потока и нагрузок
- Обеспечивает стабильную работу ESP, поддерживая постоянный крутящий момент на валу независимо от скорости вращения
- Продлевает срок службы за счет снижения общего тепла системы
- Уменьшает длину двигателя и массу тела при сохранении мощности
- Обеспечивает 380 л.с. с одним PMM, устраняя необходимость в тандемных двигателях во многих скважинах
Размеры и применение
Двигатель с постоянными магнитами предназначен для использования с нашими насосами PowerSave.Эти энергосберегающие ESP уменьшают длину и вес системы и имеют меньший внешний диаметр (OD), чем конкурирующие системы. Это делает их идеальными для горизонтальных скважин и скважин с высокой степенью тяжести. Общие приложения включают в себя:
- ESP для обычных и нетрадиционных скважин
- Широкий диапазон потоков и давлений
- ESPCP с забойным приводом
- Геотермальные насосные системы
PMM доступен в нескольких размерах, начиная с 2.17-в. (55 мм) наружный диаметр (наружный диаметр) до 7,44 дюйма (188 мм) OD. Мы предлагаем наименьший из доступных на рынке PMM, что делает его особенно выгодным в приложениях Slimline ESP [ссылка на этот текст привязки к странице Slimline ESP] и для использования с нашим внедренным кабелем ESP [ссылка на этот текст привязки на страницу ESP Colibri Rigless ].
,Двигатель постоянного тока с постоянным магнитом(принцип, конструкция и применение)
Home »Двигатель постоянного тока с постоянным магнитом (принцип, конструкция и применение)Привет, это Алекс Вонг из лучших инженеров-электриков Team ( top-ee) .com ). Инженер-электрик Дэвид Маршалл впервые написал эту статью, а другие члены команды могли бы сделать более поздние изменения. Предложения по улучшению контента приветствуются в разделе комментариев.
Двигатель постоянного тока с постоянными магнитами
Двигатель постоянного тока с постоянными магнитами Двигатель постоянного тока или Двигатель постоянного тока — это отдельно возбужденных двигателей , этот двигатель отличается от всех других типов двигателей, и от имени постоянного магнита мы используем постоянный магнит создать необходимое магнитное поле.
И я должен сказать вам, что двигатель с постоянным током обычно работает от источника постоянного тока 6 В, 12 В или 24 В, получаемого от батарей или выпрямителей.
Применение двигателя постоянного тока с постоянными магнитами:
Этот двигатель очень прост по конструкции.
Но, к сожалению, управление этим двигателем в полевых условиях невозможно, поэтому мы используем его только для небольших двигателей постоянного тока.
Итак, нам не нужно контролировать скорость, поэтому мы используем ее в простых приложениях, таких как:
• Стеклоочистители.
• Шайба.
• Автомобили в качестве стартера.
• Воздуходувки в обогревателях и кондиционерах.
• Дисководы персональных компьютеров.
• Колесо