


Позиция шагового двигателя ваз 2114
Типовые параметры работы инжекторных двигателей ВАЗ.
Для многих начинающих диагностов и простых автолюбителей, которым интересна тема диагностики будет полезна информация о типичных параметрах двигателей. Поскольку наиболее распространенные и простые в ремонте двигатели автомобилей ВАЗ, то и начнем именно с них. На что в первую очередь надо обратить внимание при анализе параметров работы двигателя?
1. Двигатель остановлен.
1.1 Датчики температуры охлаждающей жидкости и воздуха (если есть). Проверяется температура на предмет соответствия показаний реальной температуре двигателя и воздуха. Проверку лучше производить с помощью бесконтактного термометра. К слову сказать, одни из самых надежных в системе впрыска двигателей ВАЗ – это датчики температуры.
1.2 Положение дроссельной заслонки (кроме систем с электронной педалью газа). Педаль газа отпущена – 0%, акселератор нажали – соответственно открытию дроссельной заслонки. Поиграли педалью газа, отпустили – должно также остаться 0%, ацп при этом с дпдз около 0,5В. Если угол открытия прыгает с 0 до 1-2%, то как правило это признак изношенного дпдз. Реже встречается неисправности в проводке датчика. При полностью нажатой педали газа некоторые блоки покажут 100% открытия (такие как январь 5.1 , январь 7.2), а другие как например Bosch MP 7.0 покажут только 75%. Это нормально.
1.3 Канал АЦП ДМРВ в режиме покоя: 0.996/1.016 В — нормально, до 1.035 В еще приемлемо, все что выше уже повод задуматься о замене датчика массового расхода воздуха. Системы впрыска, оснащенные обратной связью по датчику кислорода способны скорректировать до некоторой степени неверные показания ДМРВ, но всему есть предел, поэтому не стоит тянуть с заменой этого датчика, если он уже изношен.
2.1 Обороты холостого хода. Обычно это – 800 – 850 об/мин при полностью прогретом двигателе. Значение количества оборотов на холостом ходу зависят от температуры двигателя и задаются в программе управления двигателем.
2.2 Массовый расход воздуха. Для 8ми клапанных двигателей типичное значение составляет 8-10 кг/ч, для 16ти клапанных – 7 – 9,5 кг/час при полностью прогретом двигателе на холостом ходу. Для ЭБУ М73 эти значения несколько больше в связи с конструктивной особенностью.
2.3 Длительность времени впрыска. Для фазированного впрыска типичное значение составляет 3,3 – 4,1 мсек. Для одновременного – 2,1 – 2,4 мсек. Собственно не так важно само время впрыска, как его коррекция.
2.4 Коэффициент коррекции времени впрыска. Зависит от множества факторов. Это тема для отдельной статьи, здесь только стоит упомянуть, что чем ближе к 1,000 тем лучше. Больше 1,000 – значит смесь дополнительно обогащается, меньше 1,000 значит обедняется.
2.5 Мультипликативная и аддитивная составляющая коррекции самообучением. Типичное значение мультипликатива 1 +/-0,2. Аддитив измеряется в процентах и должен быть на исправной системе не более +/- 5%.
2.6 При наличии признака работы двигателя в зоне регулировки по сигналу датчика кислорода последний должен рисовать красивую синусоиду от 0,1 до 0,8 В.
2.7 Цикловое наполнение и фактор нагрузки. Для «январей» типичный цикловой расход воздуха: 8ми клапанный двигатель 90 – 100 мг/такт, 16ти клапанный 75 -90 мг/такт. Для блоков управления Bosch 7.9.7 типичный фактор нагрузки 18 – 24 %.
Теперь рассмотрим подробнее, как на практике ведут себя эти параметры. Поскольку для диагностики я пользуюсь программой SMS Diagnostics (Алексею Михеенкову и Сергею Сапелину привет!) , то все скриншоты будут оттуда. Параметры сняты с практически исправных автомобилей, за исключением отдельно оговоренных случаев.
Все изображения кликабельны.
Ваз 2110 8ми клапанный двигатель, блок управления Январь 5.1
Здесь немного подправлен коэффициент коррекции СО в связи с небольшим износом ДМРВ.

Ваз 2107, блок управления Январь 5.1.3 
Ваз 2115 8ми клапанный двигатель, блок управления Январь 7.2 
Двигатель Ваз 21124, блок управления Январь 7.2 
Ваз 2114 8ми клапанный двигатель, блок управления Bosch 7.9.7 
Приора, двигатель Ваз 21126 1,6 л., блок управления Bosch 7.9.7 
Жигули Ваз 2107, блок управления М73 
Двигатель Ваз 21124, блок управления М73 
Ваз 2114 8ми клапанный двигатель, блок управления М73 
Калина, 8ми клапанный двигатель, блок управления М74

Нива двигатель ВАЗ-21214, блок управления Bosch ME17.9.7 
И в заключении напомню, что приведенные выше скриншоты сняты с реальных автомобилей, но к сожалению зафиксированные параметры не являются идеальными. Хотя я и старался фиксировать параметры только с исправных автомобилей.скачать dle 10.6фильмы бесплатно

В тот момент, когда педаль газа отпущена, а машина находится на нейтральной передаче, поддержание оборотов двигателя осуществляется таким устройством как
Признаки неисправности
Стоит отметить, что ЭБУ, как правило, не сообщает о неисправности регулятора холостого хода, поэтому
- Слишком высокие обороты холостого хода даже на прогретом двигателе;
- Слишком малые обороты, которые приводят к существенной вибрации мотора или полной его остановке;
- Невозможность запустить двигатель без нажатия на педаль газа;
- Отсутствие стабильности оборотов мотора. Обороты плавают;
- При разгоне и переключении передач, в момент отпускания педали газа обороты существенно возрастают и лишь через несколько секунд приходят к норме
- При включении дополнительного оборудования (лампы, магнитола) двигатель глохнет.
Конструкция и принцип работы
На 14-ом ВАЗе применяется датчик холостого хода с электродвигателем шагового типа. Также в его конструкции имеется конусная игла, работающая в паре с пружиной. Данная игла обеспечивает дозировку поступающего воздуха в узел дроссельной заслонки.

1-калапан; 2-корпус; 3-обмотка статора; 4-винт ходовой; 5-контактный вывод обмотки статора; 6-подшипник; 7-корпус обмотки; 8-ротор; 9-пружина.
При включении зажигания автомобиля клапан (1) полностью выдвинут и перекрывает отверстие, находящееся в дроссельном канале. Далее регулятор проводит расчёт шагов, возвращая клапан в первоначальное положение.
Исходное положение клапана регулятора холостого хода на автомобилях семейства ВАЗ зависит от типа прошивки, установленной в ЭБУ. Оно составляет 50 шагов для прошивки Bosch и 120 шагов для прошивок типа ЯНВАРЬ 5.1.
С изменением количества шагов датчика, количество воздуха, проходящего через дроссельный канал, уменьшается или увеличивается. Вытянутый клапан характеризуется большим количеством шагов и меньшим объемом проходящего воздуха. Втянутый клапан соответственно наоборот.
Для автомобиля ВАЗ 2114 расстояние от головки клапана (штока) до фланца корпуса составляет не более 23 миллиметров. Это нужно учесть при покупке нового регулятора.

Следим, чтобы данное расстояние было не больше 23 мм.
То количество воздуха, которое прошло через дроссельный узел, проверяется датчиком массового расхода воздуха. Эту информацию обрабатывает ЭБУ и соответственно подает определенное количество топлива. Таким образом формируется топливная смесь, необходимая для работы двигателя. Также ЭБУ принимает сигналы с датчика положения коленвала про обороты мотора и соответственно передает управляющие сигналы на регулятор холостого хода. В такой способ силовой агрегат обеспечивается нужным количеством поступающего воздуха.
Завод изготовитель автомобиля ВАЗ 2114 рекомендует использовать РХХ группы «ОМЕГА» с артикулом 2112-114830. Заменяемым регулятором является 2112-1148300-04 «КЗТА», который также подойдет.
Следует обратить внимание на обозначение «04», так как регуляторы холостого хода на ВАЗ выпускаются с отметками 01, 02, 03 и 04. Желательно устанавливать датчик с такой же отметкой, которая была на старом. Взаимозаменяемыми являются датчики с отметками 01 на 03 и 02 на 04 (наоборот соответственно).
Проверка датчика
Для проверки исправности РХХ необходим тестер. Проделайте следующие шаги:
- Отключите колодку проводов от разъема датчика. Колодка состоит из четырёх контактов ABCD. Последовательность этих контактов указана на самой колодке.

Расположение обмоток РХХ ВАЗ 2114

Проверка регулятора холостого хода ВАЗ 2114
Видео по теме:
На этом всё. Надеемся данный материал принес вам практическую пользу, а ваш ВАЗ 2114 снова в строю и надежно выполняет свою функцию.
2111 8кл.позиция шагового двигателя 140.что это значит.троит
Не работает панель приборов
by Adminrive · Published 23.06.2015
На мой взгляд четырка смотрится круче чем Приора Универсал как считаете на
by Adminrive · Published 27.04.2016
Какое трансмиссионное масло посоветуйте залить в коробку
by Adminrive · Published 15.01.2015
12 комментариев
это знеачит что шаговый двигатель в рхх стоит на 140 шагах
Степан, было 60 примерно теперь 140 и подстраивает на холостых
Михаил, да и 60 дохуя)
там 45 примерно на ХХ должно быть вроде.
рхх меняет количество шагов, регулируя ХХ.
при этом шток удлиняется и укорачивается
10. Установка шагового мотора. Желаемое и текущее положение регулятора ХХ Автор: А.М. Банов
Регулятор холостого хода — устройство, позволяющее менять проходное сечение байпасного канала впускного коллектора. Проходное сечение байпасного канала играет основную роль для работы двига-теля, когда дроссельная заслонка закрывается. Воздух, который двигатель всасывает в этот момент, должен быть достаточен для поддержания заданных системой управления оборотов.
Положение регулятора холостого хода измеряется в шагах от 0 до 150 шагов. Нулевое положение регулятора должно соответствовать полностью прикрытому байпасному каналу. Для корректировки правильного положения регулятора, каждый раз после выключения зажигания, блок управления проводит процедуру парковки шагового мотора. Сначала регулятор перемещается вперед до упора в нулевое положение, а затем перемещается на 120 шагов назад, таким образом, почти полностью открывая байпасный канал для последующего пуска двигателя.
Большую роль регулятор холостого хода играет на режимах пуска и прогрева двигателя. Начальное положение регулятора позволяет обеспечить достаточное поступление воздуха на режиме пуска, за счет которого обороты двигателя после пуска превышают 1000 об/мин. Далее управляющая программа прикрывает байпасный канал (уменьшает положение шагового мотора), устанавливая расход воздуха, необходимый для поддержания заданных оборотов холостого хода см.выше. По мере работы двигателя и его прогрева, система снижает заданные обороты холостого хода именно за счет уменьшения положения шагового мотора.
Еще одной важной функцией системы является сопровождение положения дроссельной заслонки. По параметру положение шагового мотора видно, что он увеличивается при открытии дроссельной заслонки. Такой алгоритм слежения позволяет обеспечить плавное снижение (без провала и заглохания) оборотов двигателя при резком бросании педали дроссельной заслонки (переключение скоростей, движение накатом и т.д.)
Если используете средства диагностики от «НТС», то работу регулятора холостого хода можно наблюдать в динамике на экранах приборов. Различают два параметра: желаемое и текущее положение шагового мотора. Для пользователя безразлично, какой параметр использовать при проверке работы, разница между ними чисто теоретическая. Выводить на экран два параметра нецелесообразно.
Р0505 – ошибка регулятора холостого хода. Движение шагового мотора в блоке управления осуществляется с помощью специальной микросхемы – драйвера. Интеллектуальность микросхемы позволяет определять нарушения в цепях управления: обрыв цепи, перегрузка, КЗ. В этом случае система самодиагностики выдает код неисправности регулятора холостого хода.
P0506 Регулятор Х.Х. заблокирован, низкие обороты Х.Х.
P1509 Перегрузка цепи упр. РХХ
P1513 Замыкание на землю цепи упр. РХХ
P1514 Обрыв или замыкание на +12В цепи упр. РХХ
Диагностика ДВС — Помощь начинающим
и куда мы должны этот лог вставить?
))))) я думал нутром))))))
хотел попросить чтоб научил!
Вкл зажигание
Температура охлаждающей жидкости при пуске (°C) 87,0
Температура охлаждающей жидкости (°C) 86,3
Температура впускного воздуха (°C) 27,8
Напряжение питания (В) 12,47
Параметр нагрузки (%) 99,98
Рассчётная нагрузка (%) 99,75
Фактор высотной коррекции (-) 1,00
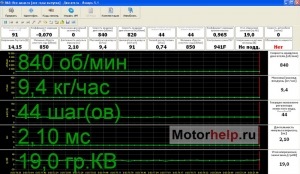
Желаемые обороты холостого хода (об/мин) 840
Позиция шагового двигателя (шаг) 59
Сигнал датчика кислорода до нейтрализатора (управляющего) (В) 0,451
Текущий коэффициент коррекции длительности впрыска топлива (-) 1,000
Заданное значение лямбда (-) 1,000
Нормализованный уровень сигнала датчика детонации (В) 3,91
Контрольная сумма (-) 31028
Мультипликативная составляющая коррекции самообучением (-) 0,999
Аддитивная составляющая коррекции самообучением (%) -0,2
Сигнал датчика кислорода после нейтрализатора (диагностического) (В) 0,451
Напряжение бортовой сети (канал АЦП) (В) 11,898
Напряж. с АЦП датчика температуры охлаж. жидкости (В) 0,57
Напряжение с АЦП датчика массового расхода воздуха (В) 1,055
Напряж. с АЦП датчика кислорода до нейтрализатора (В) 0,454
Напряжение с АЦП датчика температуры воздуха во впускном коллекторе (В) 3,20
Напряжение с АЦП датчика кислорода после нейтрализатора (В) 0,454
Сопротивление датчика кислорода до нейтрализатора (Ом) 0
Напряжение с АЦП датчика ускорения (g) 6,201
Напряжение на клапан рециркуляции (В) 4,995
Сопротивление датчика кислорода после нейтрализатора (Ом) 0
Холостой ход
Температура охлаждающей жидкости при пуске (°C) 86,3
Температура охлаждающей жидкости (°C) 87,8
Температура впускного воздуха (°C) 24,0
Напряжение питания (В) 14,31
Обороты двигателя (об/мин) 880
Массовый расход воздуха (кг/ч) 15,9
Угол опережения зажигания (°П.К.В) -3
Параметр нагрузки (%) 28,62
Рассчётная нагрузка (%) 28,5
Фактор высотной коррекции (-) 1,0
Длительность впрыска (мс) 5,09
Желаемые обороты холостого хода (об/мин) 840
Позиция шагового двигателя (шаг) 10
Желаемый расход воздуха на холостом ходу (кг/ч) 0,38
Сигнал датчика кислорода до нейтрализатора (управляющего) (В) 0,675
Текущий коэффициент коррекции длительности впрыска топлива (-) 0,888
Заданное значение лямбда (-) 1,0
Нормализованный уровень сигнала датчика детонации (В) 0,29
Среднее значение неравномерности вращения коленвала (об/с2) 4,0
Контрольная сумма (-) 31028
Расход топлива (л/ч) 1,32
Потребность в моменте для регулирования ХХ: I-часть (%) -0,30
Потребность в моменте для регулирования ХХ: PD-часть (%) -4,46
Мультипликативная составляющая коррекции самообучением (-) 0,999
Аддитивная составляющая коррекции самообучением (%) -0,2
Обороты двигателя на холостом ходу (об/мин) 900
Сигнал датчика кислорода после нейтрализатора (диагностического) (В) 0,451
Напряжение бортовой сети (канал АЦП) (В) 13,640
Напряж. с АЦП датчика температуры охлаж. жидкости (В) 0,55
Напряжение с АЦП датчика массового расхода воздуха (В) 1,582
Напряж. с АЦП датчика полож. дроссельной заслонки (В) 0,78
Напряж. с АЦП датчика кислорода до нейтрализатора (В) 0,723
Напряжение с АЦП датчика температуры воздуха во впускном коллекторе (В) 3,4
Напряжение с АЦП датчика кислорода после нейтрализатора (В) 0,454
Сопротивление датчика кислорода до нейтрализатора (Ом) 0
Напряжение с АЦП датчика ускорения (g) 6,201
Напряжение на клапан рециркуляции (В)4,995
Сопротивление датчика кислорода после нейтрализатора (Ом) 0
Вот копировал с лога.
Позиция шагового двигателя калина | Хитрости Жизни

Понятно что инфа взята из интернета, но так же скинул для себя. Может кому еще пригодится
Узел дроссельной заслонки
На первый взгляд, узел дроссельной заслонки представляет собой несложное механическое устройство. На нем располагается датчик положения дроссельной заслонки и шаговый мотор (регулятор ХХ). В комплексе этот узел должен соответствовать строгим техническим условиям. Отклонение характеристик узла дроссельной заслонки от этих ТУ существенно влияет на поведение двигателя в переходных режимах: разгон, торможение, движение накатом, работа на режиме холостого хода, запуск двигателя. Исправность датчика положения дроссельной заслонки и шагового двигателя не гарантируют правильную работу системы при некачественном исполнении механики и конструкции дроссельной заслонки. Узел дроссельной заслонки является в системе устройством, через которое водитель задает требуемую скорость движения автомобиля. Нажимая на педаль дроссельной заслонки (газа), он изменяет пропускную способность впускного коллектора для подачи воздуха в двигатель. Вторая задача дроссельного узла заключается в поддержании байпасного канала (канал ХХ) в таком режиме, чтобы при отказе водителя от управления дросселем (выключение КПП, торможение, движение накатом — во всех этих случаях дроссельная заслонка закрыта) этот канал обеспечивал необходимое наполнение двигателя воздухом для поддержания заданных системой оборотов вращения коленчатого вала. Этот режим реализуется с помощью шагового мотора, установленного в узле дроссельной заслонки. Некачественное исполнение узла дроссельной заслонки (несоответствие ТУ), как правило, вызывает следующие неисправности в работе:
• Медленное снижение оборотов двигателя после закрытия дроссельной заслонки.
• Затруднённый пуск горячего двигателя с закрытым дросселем.
• Двигатель глохнет при резком снижении нагрузки (выключение КПП, движение накатом).
Перечисленные неисправности могут быть вызваны и другими причинами, например, сбоями в системе зажигания, топливоподачи, неисправностью датчика расхода воздуха. Но эти неисправности, если они есть, проявляются и на других режимах работы двигателя.
Датчик положения дроссельной заслонки (ДПДЗ)
ДПДЗ располагается на узле дроссельной заслонки и определяет степень открытия дроссельной заслонки. Система использует показания датчика дроссельной заслонки для следующих режимов работы:
1. На режиме пуска двигателя подача топлива корректируется по степени открытия дросселя (увеличивается при открытом дросселе). Но при открытии дросселя более 90% система перестает подавать топливо в двигатель. В этом режиме можно реализовать продувку двигателя при прокрутке стартером.
2. Во время движения автомобиля, при показаниях датчика дроссельной заслонки выше определенного значения, система с учетом оборотов двигателя обеспечивает мощностной режим топливоподачи. Расчет времени открытия форсунки в зависимости от расхода воздуха определяется параметром обогащения состава топливно-воздушной смеси по таблицам, зашитым в памяти блока управления. В резервных режимах, при выходе из строя датчика массового расхода показания датчика дроссельной заслонки определяют наполнение цилиндров воздухом для расчета топливоподачи в двигатель и установки угла опережения зажигания.
3. В рабочих режимах положение дроссельной заслонки 0% означает выход на режим холостого хода. В этом случае задача системы — поддерживать заданный уровень частоты вращения коленчатого вала в зависимости от показаний датчика температуры и скорости автомобиля. Блок управления пытается снизить обороты двигателя, управляя режимом блокировки топливоподачи до границы, с которой включается программный регулятор холостого хода, обеспечивающий с помощью шагового мотора и угла опережения зажигания стабильную работу двигателя на заданных оборотах.
Нужно понимать, что система пользуется показаниями датчика положения дросселя не только для определения режима работы (холостой ход, мощностной режим, продувка двигателя при запуске, работа в резервных режимах), но и проводит коррекцию подачи топлива в двигатель в зависимости от скорости изменения положения дроссельной заслонки (в аналогии с карбюратором — ускорительный насос). Ресурс работы датчиков российских производителей оставляет желать лучшего. Стирание резистивного слоя на внутренних контактах датчика может приводить к ряду сбоев в работе системы. Переход на бесконтактный датчик поможет выправить ситуацию. Как правило, показания датчика нарушаются в положениях, где он чаще всего и работает — это нулевое (или близкое к нему) положение дроссельной заслонки.
Характерные сбои в работе системы при неисправном датчике дроссельной заслонки:
• Зависание оборотов холостого хода на уровне 1500-3000 в зависимости от температуры двигателя (Это резервный режим работы системы, он вызван неисправностью датчика, система в этом случае не регулирует обороты холостого хода).
• Резкие рывки при наборе скорости. Вызываются резкими провалами в показаниях положения дроссельной заслонки.
Неисправность датчика положения дроссельной заслонки достаточно хорошо определяется системой самодиагностики блока управления. При плохом датчике загорается лампа «Проверь двигатель» и в память блока заносится соответствующий код неисправности. Когда появляется такой код неисправности, а вы не заметили сбоев в работе системы, проверьте крепление датчика и его разъем. И будьте готовы к замене датчика через некоторое время. Если при наличии перечисленных неисправностей система самодиагностики не выдает кода неисправности по датчику дроссельной заслонки, не торопитесь его менять. Признаки, перечисленные выше, скорее всего, вызваны другими причинами.
Регулятор холостого хода (РХХ)
Шаговый мотор установлен в байпасном канале узла дроссельной заслонки. Положение вала шагового мотора определяет проходное сечение байпасного канала, необходимое для устойчивой работы двигателя при закрытой дроссельной заслонке. В системе управления шаговый мотор выполняет несколько основных функций:
• Система отслеживает с помощью шагового мотора такое сечение байпасного канала (в зависимости от оборотов двигателя, скорости автомобиля и положения дроссельной заслонки) при котором в случае сброса нагрузки должно быть обеспечено плавное снижение оборотов коленчатого вала до заданных оборотов холостого хода. Прогрев двигателя после запуска. Система определяет тепловое состояние двигателя по датчику температуры охлаждающей жидкости и автоматически устанавливает обороты холостого хода (минимальные обороты при закрытой дроссельной заслонке). С помощью шагового мотора в этом случае задается такое сечение байпасного канала, при котором двигатель способен поддерживать эти обороты.
• При открытии дроссельной заслонки весь воздух в двигатель поступает через сечение дроссельной заслонки, а байпасный канал должен быть подготовлен к резкому закрытию дросселя и сбросу нагрузки (отключение КПП).
• Третьей функцией шагового мотора является компенсация контролируемой блоком управления нагрузки (включение/выключение вентилятора, кондиционера и т.д.). В режиме холостого хода система корректирует положение шагового мотора до включения/выключения нагрузки. Тем самым компенсируется мощность, подключаемой этой нагрузки (компенсирует провал оборотов в режиме холостого хода).
Шаговый мотор и называют регулятором холостого хода, но он выполняет лишь перечисленные функции. Заданные обороты холостого хода в пределах ?50 об/мин поддерживаются в основном быстрым контуром управления — регулятором по углу опережения зажигания. Раскачка оборотов в режиме холостого хода зависит именно от этого контура и влияния возмущений в системе топливоподачи. Шаговый мотор определяет медленную составляющую в регулировании, отслеживая режимные переходы системы управления.
Выход из строя шагового двигателя приводит к явным сбоям в системе: невозможность работы двигателя на холостом ходу, повышение оборотов ХХ, увеличивающихся по мере прогрева двигателя. Эти неисправности возникают и при неполадках в цепях управления шаговым мотором и могут быть определены при помощи тестера ДСТ-2М, который позволяет задавать положение шагового мотора как параметр блока управления. Выбрав режим управления исполнительными механизмами в тестере, нужно подвигать шаговый мотор с помощью блока управления в ту или иную сторону. Если при этом обороты двигателя не изменяются, расход воздуха остается постоянным, а система определяет постоянное положение шагового мотора, неисправность шагового мотора или цепей его управления очевидна. Проверка шагового мотора с помощью тестера может и не дать результата. Система будет правильно отрабатывать ваши попытки закрыть или открыть байпасный канал. Но при этом при эксплуатации автомобиля останутся: зависания оборотов при отключении КПП и заглохания двигателя при движении накатом и невозможность запуска двигателя без помощи дроссельной заслонки. Появление в комплексе этих неисправностей говорит о неисправности шагового двигателя или его цепей управления. И даже при исправных цепях, шаговый мотор может просто неправильно выполнять команды системы управления. Вместо движения вперед отрабатывает движение назад или наоборот. Это можно наблюдать, если снять шаговый мотор и специальным тестером задавать ему движения в разные стороны. Алгоритм управления шагового мотора достаточно сложен, и сбои в его работе могут быть выявлены только специальным тестером, например, ДСТ-6C. Блок управления может выдавать код неисправности шагового мотора, но не всегда это означает, что шаговый мотор или цепи его управления действительно вышли из строя. К сожалению, этот код может появиться и при исправном шаговом моторе. Прежде чем разбираться с шаговым мотором, убедитесь, что заданные обороты холостого хода в системе выставляются правильно по температуре двигателя и режим холостого хода определен в системе (положение дроссельной заслонки 0%).
Совет: Если смазывать механическую часть шагового мотора литолом, то он работает значительно лучше и дольше. После смазки плохой шаговый мотор часто восстанавливает свою работоспособность.

Вот нашел полезную информацию по типовым параметрам. Сделана по сути как заметка для себя.
Для многих начинающих диагностов и простых автолюбителей, которым интересна тема диагностики будет полезна информация о типичных параметрах двигателей. Поскольку наиболее распространенные и простые в ремонте двигатели автомобилей ВАЗ, то и начнем именно с них. На что в первую очередь надо обратить внимание при анализе параметров работы двигателя?
1. Двигатель остановлен.
1.1 Датчики температуры охлаждающей жидкости и воздуха (если есть). Проверяется температура на предмет соответствия показаний реальной температуре двигателя и воздуха. Проверку лучше производить с помощью бесконтактного термометра. К слову сказать, одни из самых надежных в системе впрыска двигателей ВАЗ – это датчики температуры.
1.2 Положение дроссельной заслонки (кроме систем с электронной педалью газа). Педаль газа отпущена – 0%, акселератор нажали – соответственно открытию дроссельной заслонки. Поиграли педалью газа, отпустили – должно также остаться 0%, ацп при этом с дпдз около 0,5В. Если угол открытия прыгает с 0 до 1-2%, то как правило это признак изношенного дпдз. Реже встречается неисправности в проводке датчика. При полностью нажатой педали газа некоторые блоки покажут 100% открытия (такие как январь 5.1 , январь 7.2), а другие как например Bosch MP 7.0 покажут только 75%. Это нормально.
1.3 Канал АЦП ДМРВ в режиме покоя: 0.996/1.016 В — нормально, до 1.035 В еще приемлемо, все что выше уже повод задуматься о замене датчика массового расхода воздуха. Системы впрыска, оснащенные обратной связью по датчику кислорода способны скорректировать до некоторой степени неверные показания ДМРВ, но всему есть предел, поэтому не стоит тянуть с заменой этого датчика, если он уже изношен.
2. Двигатель работает на холостом ходу.
2.1 Обороты холостого хода. Обычно это – 800 – 850 об/мин при полностью прогретом двигателе. Значение количества оборотов на холостом ходу зависят от температуры двигателя и задаются в программе управления двигателем.
2.2 Массовый расход воздуха. Для 8ми клапанных двигателей типичное значение составляет 8-10 кг/ч, для 16ти клапанных – 7 – 9,5 кг/час при полностью прогретом двигателе на холостом ходу. Для ЭБУ М73 эти значения несколько больше в связи с конструктивной особенностью.
2.3 Длительность времени впрыска. Для фазированного впрыска типичное значение составляет 3,3 – 4,1 мсек. Для одновременного – 2,1 – 2,4 мсек. Собственно не так важно само время впрыска, как его коррекция.
2.4 Коэффициент коррекции времени впрыска. Зависит от множества факторов. Это тема для отдельной статьи, здесь только стоит упомянуть, что чем ближе к 1,000 тем лучше. Больше 1,000 – значит смесь дополнительно обогащается, меньше 1,000 значит обедняется.
2.5 Мультипликативная и аддитивная составляющая коррекции самообучением. Типичное значение мультипликатива 1 +/-0,2. Аддитив измеряется в процентах и должен быть на исправной системе не более +/- 5%.
2.6 При наличии признака работы двигателя в зоне регулировки по сигналу датчика кислорода последний должен рисовать красивую синусоиду от 0,1 до 0,8 В.
2.7 Цикловое наполнение и фактор нагрузки. Для «январей» типичный цикловой расход воздуха: 8ми клапанный двигатель 90 – 100 мг/такт, 16ти клапанный 75 -90 мг/такт. Для блоков управления Bosch 7.9.7 типичный фактор нагрузки 18 – 24 %.
Теперь рассмотрим подробнее, как на практике ведут себя эти параметры. Поскольку для диагностики я пользуюсь программой SMS Diagnostics (Алексею Михеенкову и Сергею Сапелину привет!), то все скриншоты будут оттуда. Параметры сняты с практически исправных автомобилей, за исключением отдельно оговоренных случаев.
Ваз 2110 8ми клапанный двигатель, блок управления Январь 5.1
Здесь немного подправлен коэффициент коррекции СО в связи с небольшим износом ДМРВ.
Ваз 2107, блок управления Январь 5.1.3

Ваз 2115 8ми клапанный двигатель, блок управления Январь 7.2
Шаговый мотор установлен в байпасном канале узла дроссельной заслонки. Положение вала шагового мотора определяет проходное сечение байпасного канала, необходимое
— для устойчивой работы двигателя при закрытой дроссельной заслонке.
В системе управления шаговый мотор выполняет несколько основных функций:
• Прогрев двигателя после запуска. Система определяет тепловое состояние двигателя по датчику температуры охлаждающей жидкости и автоматически устанавливает обороты холостого хода (минимальные обороты при закрытой дроссельной заслонке). С помощью шагового мотора в этом случае задается такое сечение байпасного канала, при котором двигатель способен поддерживать эти обороты.
• При открытии дроссельной заслонки весь воздух в двигатель поступает через сечение дроссельной заслонки, а байпасный канал должен быть подготовлен к резкому закрытию дросселя и сбросу нагрузки (отключение КПП). Система отслеживает с помощью шагового мотора такое сечение байпасного канала (в зависимости от оборотов двигателя, скорости автомобиля и положения дроссельной заслонки) при котором в случае сброса нагрузки должно быть обеспечено плавное снижение оборотов коленчатого вала до заданных оборотов холостого хода.
• Третьей функцией шагового мотора является компенсация контролируемой блоком управления нагрузки (включение/выключение вентилятора, кондиционера и т.д.). В режиме холостого хода система корректирует положение шагового мотора до включения/выключения нагрузки. Тем самым компенсируется мощность, подключаемой этой нагрузки (компенсирует провал оборотов в режиме холостого хода).
Шаговый мотор и называют регулятором холостого хода, но он выполняет лишь перечисленные функции. Заданные обороты холостого хода в пределах 50 об/мин поддерживаются в основном быстрым контуром управления — регулятором по углу опережения зажигания. Раскачка оборотов в режиме холостого хода зависит именно от этого контура и влияния возмущений в системе топливоподачи. Шаговый мотор определяет медленную составляющую в регулировании, отслеживая режимные переходы системы управления.
Выход из строя шагового двигателя приводит к явным сбоям в системе: невозможность работы двигателя на холостом ходу, повышение оборотов ХХ, увеличивающихся по мере прогрева двигателя. Эти неисправности возникают и при неполадках в цепях управления шаговым мотором и могут быть определены при помощи тестера ДСТ-2М, который позволяет задавать положение шагового мотора как параметр блока управления.
Выбрав режим управления исполнительными механизмами в тестере, нужно подвигать шаговый мотор с помощью блока управления в ту или иную сторону. Если при этом обороты двигателя не изменяются, расход воздуха остается постоянным, а система определяет постоянное положение шагового мотора, неисправность шагового мотора или цепей его управления очевидна.
Проверка шагового мотора с помощью тестера может и не дать результата. Система будет правильно отрабатывать ваши попытки закрыть или открыть байпасный канал. Но при этом при эксплуатации автомобиля останутся зависания оборотов при отключении КПП и заглохания двигателя при движении накатом и невозможность запуска двигателя без помощи дроссельной заслонки. Появление в комплексе этих неисправностей говорит о неисправности шагового двигателя или его цепей управления. И даже при исправных цепях, шаговый мотор может просто неправильно выполнять команды системы управления. Вместо движения вперед отрабатывает движение назад или наоборот. Это можно наблюдать, если снять шаговый мотор и специальным тестером задавать ему движения в разные стороны. Алгоритм управления шагового мотора достаточно сложен, и сбои в его работе могут быть выявлены только специальным тестером, например, ДСТ-6С.
Блок управления может выдавать код неисправности шагового мотора, но не всегда это означает, что шаговый мотор или цепи его управления действительно вышли из строя. К сожалению, этот код может появиться и при исправном шаговом моторе.
Прежде чем разбираться с шаговым мотором, убедитесь, что заданные обороты холостого хода в системе выставляются правильно по температуре двигателя и режим холостого хода определен в системе (положение дроссельной заслонки 0%).
Совет: Если смазывать механическую часть шагового мотора литолом, то он работает значительно лучше и дольше. После смазки плохой шаговый мотор часто восстанавливает свою работоспособность.
Датчик холостого хода. Шаговый мотор (регулятор ХХ)
Шаговый мотор установлен в байпасном канале узла дроссельной заслонки. Положение вала шагового мотора определяет проходное сечение байпасного канала, необходимое
— для устойчивой работы двигателя при закрытой дроссельной заслонке.
В системе управления шаговый мотор выполняет несколько основных функций:
• Прогрев двигателя после запуска. Система определяет тепловое состояние двигателя по датчику температуры охлаждающей жидкости и автоматически устанавливает обороты холостого хода (минимальные обороты при закрытой дроссельной заслонке). С помощью шагового мотора в этом случае задается такое сечение байпасного канала, при котором двигатель способен поддерживать эти обороты.
• При открытии дроссельной заслонки весь воздух в двигатель поступает через сечение дроссельной заслонки, а байпасный канал должен быть подготовлен к резкому закрытию дросселя и сбросу нагрузки (отключение КПП). Система отслеживает с помощью шагового мотора такое сечение байпасного канала (в зависимости от оборотов двигателя, скорости автомобиля и положения дроссельной заслонки) при котором в случае сброса нагрузки должно быть обеспечено плавное снижение оборотов коленчатого вала до заданных оборотов холостого хода.
• Третьей функцией шагового мотора является компенсация контролируемой блоком управления нагрузки (включение/выключение вентилятора, кондиционера и т.д.). В режиме холостого хода система корректирует положение шагового мотора до включения/выключения нагрузки. Тем самым компенсируется мощность, подключаемой этой нагрузки (компенсирует провал оборотов в режиме холостого хода).
Шаговый мотор и называют регулятором холостого хода, но он выполняет лишь перечисленные функции. Заданные обороты холостого хода в пределах 50 об/мин поддерживаются в основном быстрым контуром управления — регулятором по углу опережения зажигания. Раскачка оборотов в режиме холостого хода зависит именно от этого контура и влияния возмущений в системе топливоподачи. Шаговый мотор определяет медленную составляющую в регулировании, отслеживая режимные переходы системы управления.
Выход из строя шагового двигателя приводит к явным сбоям в системе: невозможность работы двигателя на холостом ходу, повышение оборотов ХХ, увеличивающихся по мере прогрева двигателя. Эти неисправности возникают и при неполадках в цепях управления шаговым мотором и могут быть определены при помощи тестера ДСТ-2М, который позволяет задавать положение шагового мотора как параметр блока управления.
Выбрав режим управления исполнительными механизмами в тестере, нужно подвигать шаговый мотор с помощью блока управления в ту или иную сторону. Если при этом обороты двигателя не изменяются, расход воздуха остается постоянным, а система определяет постоянное положение шагового мотора, неисправность шагового мотора или цепей его управления очевидна.
Проверка шагового мотора с помощью тестера может и не дать результата. Система будет правильно отрабатывать ваши попытки закрыть или открыть байпасный канал. Но при этом при эксплуатации автомобиля останутся зависания оборотов при отключении КПП и заглохания двигателя при движении накатом и невозможность запуска двигателя без помощи дроссельной заслонки. Появление в комплексе этих неисправностей говорит о неисправности шагового двигателя или его цепей управления. И даже при исправных цепях, шаговый мотор может просто неправильно выполнять команды системы управления. Вместо движения вперед отрабатывает движение назад или наоборот. Это можно наблюдать, если снять шаговый мотор и специальным тестером задавать ему движения в разные стороны. Алгоритм управления шагового мотора достаточно сложен, и сбои в его работе могут быть выявлены только специальным тестером, например, ДСТ-6С.
Блок управления может выдавать код неисправности шагового мотора, но не всегда это означает, что шаговый мотор или цепи его управления действительно вышли из строя. К сожалению, этот код может появиться и при исправном шаговом моторе.
Прежде чем разбираться с шаговым мотором, убедитесь, что заданные обороты холостого хода в системе выставляются правильно по температуре двигателя и режим холостого хода определен в системе (положение дроссельной заслонки 0%).
Совет: Если смазывать механическую часть шагового мотора литолом, то он работает значительно лучше и дольше. После смазки плохой шаговый мотор часто восстанавливает свою работоспособность.
О шаговых двигателях и том, как их есть
Недавно я уже писал о том, что поимел большую головную боль в виде необходимости выбирать себе новые шаговые движки. Когда-то давно, когда трава была зеленее… Ну, в общем, закупил себе набор движков, который валялся до поры до времени. Закупал их особо не заморачиваясь и не разбираясь, как их выбирать и на что сомтреть. Не повторяйте моих ошибок, изучите вопрос. Ниже я опишу подробно, что мне удалось с тех пор узнать о шаговых движках, а в частности о том, как грамотно подойти к вопросу их выбора.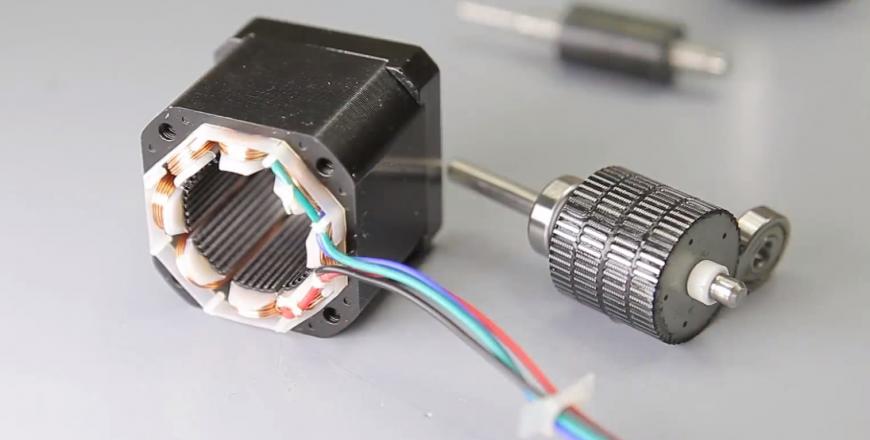 Но сначала, для того, чтобы лучше понимать вопрос — давайте разберёмся,- ‘что же такое шаговый электродвигатель?’.
Но сначала, для того, чтобы лучше понимать вопрос — давайте разберёмся,- ‘что же такое шаговый электродвигатель?’.Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.Так говорит нам википедия, хотя я бы назвал его не ‘бесщёточный’, а ‘бесколлекторный’, но с википедией спорить не будем, её всё таки ‘умные’ люди пишут. Да и суть от этого не сильно меняется, это, по сути своей, такой же двигатель, что и другие. Как, например, на дорогой гоночной машинке с БК движком. Такой же, да вот не такой!
Шаговый двигатель в первую очередь спроектирован не для того, что бы он просто вращался и передавал свой вращающий момент исполнительному механизму. Он должен обеспечивать высокую точность позиционирования и достаточный момент удержания.И вот тут мы в плотную подходим к двум парам важных характеристик шагового электродвигателя. Первая пара это удерживающий момент и номинальный ток, а вторая угол поворота (шаг) и погрешность шага. Пройдёмся по каждой паре подробно.
Удерживающий момент — это то, с какой силой двигатель, если на него подан номинальный ток, будет сопротивляться попыткам его провернуть. Если подать на двигатель ток равный номинальном, это обеспечивает максимальный момент удержания.Если ток завышен, то двигатель греется, если ток занижен, то снижается сила, с которой он сопротивляется проворачиванию, и двигатель может начать (и начнёт) пропускать шаги. Так же необходимо помнить, что самый распространённые драйверы для шаговых двигателей A4998 и DRV8825 могут обеспечить только 2А и 2.2А соответственно. Не нужно гоняться за заоблачными показателями. 4000 г/см и 1.7-1.8А хватит за глаза и уши даже для такой брутальной кинематики, как H-Bot.
Угол поворота — это угол поворота, на который двигатель поворачивается за один шаг (кто бы мог подумать?). Потому, иногда, его просто называют шагом и не парятся. А погрешность шага — это максимальное отклонение от заданного угла поворота в процентах.Выходит, что чем мельче шаг, тем круче и точнее? Нет! Шаг в 1.8 градуса это всё, что вам нужно. Не буду сейчас приводить таблицы и примеры расчёта перемещений исполнительных механизмов на разных моделях принтеров и разных кинематиках. Поверьте мне на слово, лучше смотрите на погрешность шага, пользы будет больше. 5% — очень и очень хороший показатель.
И тут можно задаться вопросом, — ‘а как же напряжение?’. Напряжение особой роли не играет, т.к. его регулирует драйвер шагового двигателя, что бы поддерживать необходимый ток. Но знайте меру. 3V — 5V вполне достаточно, 3.4V, наверное, в самый раз.
Есть ещё такой параметр, как количество фаз. Ну, если совсем просто, то это сколько контактов/проводов торчит из двигателя. По хорошему, нам для принтера нужны биполярные двигатели с 4-мя фазами (проводами). Но существуют и с 6-тью и, даже, с 8-мью. Последние — экзотика в наших краях (ну я по крайней мере вообще их в руках не держал). А вот те, что с 6-тью проводами — те встречаются. Если просто, то это тоже самое, что и с 4-мя, но на обеих обмотках есть центральный отвод. Более наглядно можно посмотреть на иллюстрации, которую я честно где-то стырил.

Но я так и не сказал, что брать? Если есть 4-выводной, берём его, если нет, не расстраиваемся и берём 6-выводной. Но лучше берите 4-выводной (мороки меньше). Кстати, на картинке 8-выводной двигатель показан в режиме, когда у него пары обмоток подключены параллельно.
О чём ещё не сказал? О размерах? Ну разве ими кого-то удивишь? Наш типоразмер это Nema17, тут ничего нового. Можно и другие, но это уже снова экзотика.
Ну и последнее. Вот я купил двигатель, а дальше что? Как на нём правильно настроит ток? А всё очень просто, я уже поверхностно описывал этот процесс в одном из своих постов. Нам понадобится мультиметр, отвёртка и немного математики. Настройка тока производится методом кручения подсроечника на драйвере и снятия контрольного напряжения. Напряжение можно снимать — как на картинке.

А дальше считаем по формуле, какое контрольное напряжение (Vr) нам надо выставить. Формула различается для разных драйверов.
Для A4988:
Vr = Номинальный ток / 2,5
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 .5 = 0.68V
Для DRV8825:
Vr = Номинальный ток / 2
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 = 0,85V
PSoC – «Плавный» ход шагового двигателя
PSoC – «Плавный» ход шагового двигателя Стандартный шаговый двигатель от 5-дюймового дисковода
можно заставить вращаться плавно и использовать, например, для привода секундной стрелки в часах.
Тока, отдаваемого микросхемой PSoC, оказывается достаточно для прямого подключения обмоток двигателя к выводам микросхемы.
Для «плавного» вращения шагового (синхронного) двигателя обычно используется микрошаговый режим. Это означает, что токи в обмотках по мере их переключения меняются не скачком, а достаточно плавно – ток в одной обмотке постепенно замещается током в другой. Ротор, следуя за магнитным полем, проходит при этом все промежуточные положения. Приставка «микро-» отражает невозможность получения в цифровых системах бесконечно малых приращений. Конечная величина дробления шага задает лишь иллюзию «плавности».
В двигателях, специально «заточенных» под промежуточные положения ротора, приняты меры по обеспечению точного профилирования магнитного поля. В результате этого нарастающий и ниспадающий по закону синуса ток в обмотках приводит к строго пропорциональному перемещению ротора между крайними точками. Крутящий момент на валу при этом остается постоянным.
В обычных шаговых двигателях (которые можно встретить в принтерах и дисководах) линейность перемещения и постоянство момента внутри шага не нормируется, поэтому мне было интересно оценить их возможности. Свои эксперименты я ставил с двигателями от приводов 5-дюймовых дисков (уже ушедших в Небытие).
Такой двигатель имеет 6 проводов (две обмотки с отводами от середин, хотя попадаются экземпляры и с 5 проводами, у которых средние точки соединены внутри), и на нем написано: 1.8 deg./step, 0.16A/phase. Это означает, что подавая последовательно на каждую полуобмотку ток (в данном случае 0,16 А максимум, а средние точки обычно подключаются к «+» питания), мы заставим его каждый раз поворачиваться на угол 1,8о. Сопротивления полуобмоток составляют 75 ом и легко «вызваниваются» мультиметром. Обычно средним точкам соответствуют провода красного цвета. Чтобы совершить полный оборот, надо сделать цепочку из 50 х 4 = 200 переключений.
Если при отсоединенных обмотках попробовать вручную провернуть вал, то рука почувствует едва ощутимое сопротивление в виде дрожи. Это – так называемое «магнитное залипание», явление, обусловленное неоднородностью взаимодействия магнитных систем ротора и статора, а также наличием остаточной намагниченности статора (магнитопровода, на котором расположены обмотки). Это «залипание» не только ухудшает линейность перемещения внутри шага, но и создает определенный порог по току, ниже которого двигатель не удается привести во вращение даже на холостом ходу.
Ставя эксперименты, мне хотелось решить два вопроса:
1. Хватит ли тока, генерируемого микроконтроллером, чтобы вращать вал на малой нагрузке или, хотя бы, на холостом ходу?
2. Так ли уж необходим классический закон синуса-косинуса для равномерного вращения?
Для экспериментов была собрана схема, показанная на рисунке. Собственно «собираться» было нечему, т.к. была использована плата Программатора микросхем PSoC, имеющая панельку под микросхему в корпусе DIP8 и 6-контактный разъем для макетирования простейших устройств. Ввиду отсутствия на плате кварца, отладка производилась без него, с использованием внутреннего тактового генератора микросхемы. Следует отметить, что цепи возбуждения кварца у микросхем PSoC очень капризные, и следует руководствоваться рекомендациями AN2027 «Using the PSoC Microcontroller External Crystal Oscillator» (использовать несимметричную схему включения и подключение конденсаторов к «плюсу» питания). Также учтите, что при так называемом «программировании в устройстве» емкость С4 может оказаться чересчур большой для программатора (для 8-выводных чипов используется специальный режим программирования – «по подаче питания»), и потребуется ее временное отключение.
В схеме не используются отводы от середин, и полуобмотки работают как единая обмотка. Это сделано по двум соображениям. Во-первых – для универсальности (двигатели от 3-дюймовых дисководов отводов не имеют). Второе – уменьшить до приемлемых величин управляющий ток (сопротивление возрастает вдвое). Импульсы самоиндукции (шаговый двигатель – индуктивная нагрузка) гасятся встроенными в микросхему диодами.
При 3-вольтовом питании через обмотку сопротивлением 150 ом потечет ток 20 мА, что ниже максимально допустимых 25 мА для цифровых выходов PSoC. При питании от 5 вольт ток не достигнет ожидаемых 33 мА и ограничится на уровне 25 мА. У выходов же, сконфигурированных как аналоговые, допустимый ток составляет 50 мА, и они будут работать в штатном режиме во всем диапазоне питающих напряжений.
Вначале была создана Конфигурация 1 (см. рисунок). Ток через обмотки задается с помощью ШИМ (широтно-импульсной модуляции), которую вырабатывает единственный модуль PWM8_1. Частота ШИМ постоянна и составляет 7,8 кГц, а вот скважность меняется от 0 до 100% по линейной зависимости программным путем (прямой записью в соответствующий регистр модуля). Выход модуля через блоки LUT0…LUT3 («LookUp Table» – блоки с программируемой передаточной функцией) распределяется по ножкам микросхемы в соответствии с приведенной диаграммой. Смена функций LUT также осуществляется программно. Учтите, что на диаграммах показано не текущее значение счетного регистра PWM8_1, а то, как относительно медленно меняется скважность (т.е. ток через обмотки) на разных фазах вращения ротора.
Технические подробности. Каждые 1/512 секунды (используются прерывания от «спящего таймера») значение регистра ШИМ увеличивается в среднем на 1,666 (цель – получить требуемый темп вращения 1 оборот за 60 сек). «В среднем» означает, что использован некий трюк («Dithering») для реализации дробного исчисления, заключающийся в варьировании приращения (1 или 2) в зависимости от состояния вспомогательной переменной [cnt], циклически меняющей значения от 1 до 3. Сделать именно так мне показалось проще.
И начальная инициализация, и тело обработчика прерывания находятся в файле main.asm. Сам проект находится в папке /TestSMotor-lin/ прилагаемого архива (ссылка дана в конце статьи). Готовый файл прошивки testsmotor.hex находится в папке /output/ этого проекта. Порог срабатывания встроенного в микросхему «детектора напряжения» выставлен 2,92 В, что соответствует минимально возможному снижению напряжению питания.
Визуальные впечатления: стрелка, прикрепленная к валу двигателя, вращается достаточно равномерно. Рывки, конечно, заметны, если на них акцентировать внимание. Посмотрим, что даст классическое управление с помощью синуса-косинуса.
Для этого была создана Конфигурация 2 (см. рисунок). Ток через обмотки задается с помощью двух модулей ЦАП DAC9_1 и DAC9_2 (оба модуля имеют разрядность 9 бит). 8-битное значение выбирается из таблицы размером 256 байт, в которой содержатся значения синуса за 1/4 периода. Остальные значения вычисляются путем зеркальных переворотов этой «четвертинки» относительно осей X и Y, причем к 8-битовому значению добавляется 9-ый знаковый бит. Выходные аналоговые буферы микросхемы, в отличие от внутренних аналоговых блоков, не являются «rail-to-rail» узлами (т.е. работающими «от края до края» питающих напряжений). Чтобы предотвратить связанное с этим ограничение выходного сигнала, размах табличного синуса взят не на полную шкалу, а с некоторым запасом. В качестве опорного напряжения для ЦАП выбрана опция «1/2 от питающего напряжения» (при снижении напряжения питания, выходные напряжения будут также пропорционально снижаться). Проект находится в папке /TestSMotor-sin/.
Визуальные впечатления: Практически то же самое. Вышеупомянутые эффекты не позволяют ротору совершать идеальное равномерное движение. Возможно, если немного «подправить» синус, результат будет лучше, но это требует дополнительной исследовательской работы и привяжет «прошивку» к конкретному экземпляру двигателя (между прочим, хорошая тема для курсовой работы!).
В заключение приведу средние токи потребления привода в зависимости от питающих напряжений (в скобках даны токи, потребляемые только микросхемой). Видно, что вовлечение в работу аналоговых блоков увеличивает токопотребление микросхемы. Сам шаговый двигатель в конфигурации «Sin-Cos» также потребляет больше, поскольку в момент равенства токов через обмотки их суммарное значение в корень из двух раз больше, чем в конфигурации «Линейный режим» (хотя это и сказывается положительно на крутящем моменте), а сам ток потребления из-за этого становится пульсирующим.
. | 3 В | 5 В |
«Линейный режим» | 14 мА (4 мА микросхема) | 24 мА (6 мА микросхема) |
«Sin-Cos» | 30 мА (14 мА микросхема) | 47 мА (18 мА микросхема) |
.
Дополнительные материалы:
Testsmotor.zip (89 кБ) – архив с проектами (в папках /output/ находятся готовые файлы
прошивки *.hex, которые продублированы в корневой директории).
Текст программы – ассемблер. Среда разработки – PSoC Designer 4.3.
antiradio.narod.ru/psoc
Дата создания документа: 05.04.2011. Последнее обновление: 23.08.2016.