


§78. Режимы работы асинхронных двигателей
Режимы работы асинхронных двигателей. Холостой ход. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.

Нагрузочный режим. Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется
Рис. 260. Энергетическая диаграмма асинхронного двигателя
следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается. Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн. При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента М
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cos?1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260). В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ?Рэл1 и ротора ?Рэл2, магнитные ?Рм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ?Р
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I
M = cмФтI2 cos?2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников. Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем. Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — ?
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cos?2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos ?2, вследствие чего активная составляющая тока в обмотке ротора I2cos ?2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент М
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска. В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре. Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение М
Тормозные режимы асинхронных двигателей
Полная механическая характеристика асинхронного двигателя во всех квадрантах поля Мs, представлена на рис.3.14.
Асинхронный двигатель может работать в трех тормозных режимах: рекуперативного торможения, динамического торможения и торможения противовключением; специфическим тормозным режимом является также конденсаторное торможение.
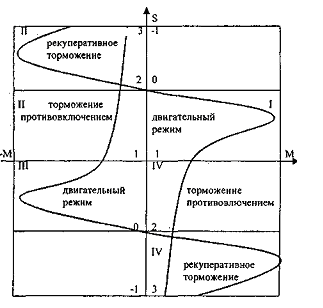
Рис.3.14. Полная механическая характеристика асинхронного двигателя
Рекуперативное генераторное торможение возможно, когда скорость ротора выше скорости вращения электромагнитного поля статора, чему соответствует отрицательное значение скольжения ω > ω0; s < 0 .
Для того, чтобы ротор двигателя перешел синхронную скорость и разогнался до скорости выше синхронной, к его валу должен быть приложен внешний совпадающий со знаком скорости вращающий момент. Это может быть, например, в приводе подъемной лебедки в режиме спуска груза.
Механическая характеристика асинхронного двигателя в режиме рекуперативного торможения идентична (с учетом угловой симметрии) характеристике двигателя в двигательном режиме. Расчет характеристик может производиться по формуле Клосса (3.27), Максимальный момент в режиме рекуперативного торможения несколько выше, чем максимальный момент в двигательном режиме. Для рекуперативного режима
Несколько большая величина максимального момента в генераторном режиме объясняется тем, что потери в статоре (на сопротивлении r1) в двигательном режиме уменьшают момент на валу, а в генераторном режиме момент на валу должен быть больше, чтобы покрыть потери в статоре.
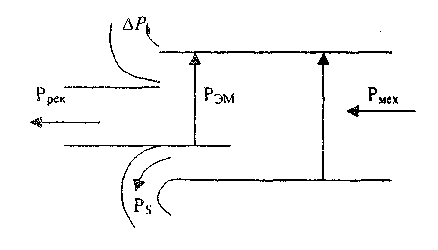
Рис.3.15. Энергетическая диаграмма асинхронного двигателя в режиме рекуперативного торможения
Энергетический баланс в режиме рекуперативного генераторного торможения определяется следующим (рис.3.15). Механическая мощность, поступающая на вал двигателя, преобразуется в электромагнитную мощность вращающегося поля Рэм и электрическую мощность, трансформируемую в роторную цепь двигателя. По аналогии с (3.35) получим
Рмех = Рэм – Рs = Мω0 – М ω0s
Электромагнитная мощность, за исключением потерь в статоре, отдается в питающую сеть, а мощность скольжения рассеивается в роторной цепи.Отметим, что в режиме рекуперативного торможения асинхронный двигатель генерирует и отдает в сеть активную мощность, а для создания электромагнитного поля асинхронный двигатель и в режиме генератора должен обмениваться с сетью реактивной мощностью. Поэтому асинхронная машина не может работать автономным генератором при отключении от сети. Возможно, однако, подключение асинхронной машины к конденсаторным батареям, как к источнику реактивной мощности (см. рис.3.19).
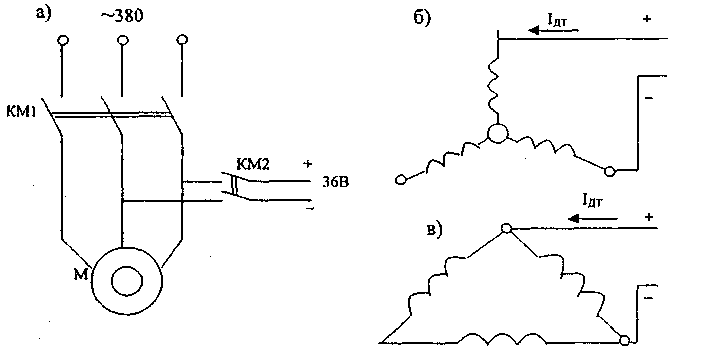
Рис.3.16. Схемы подключения асинхронного двигателя в режиме динамического торможения
Способ динамического торможения характеризуется тем, что статорные обмотки отключаются от сети переменного тока и подключаются к источнику постоянного напряжения (см. рис.3.16). При питании обмоток статора постоянным током создается неподвижное в пространстве электромагнитное поле, т.е. скорость вращения поля статора ω0дт = 0. Скольжение будет равно
sдт = – ω/ ω0н
где ω0н– номинальная угловая скорость вращения поля статора.
Вид механических характеристик (см. рис.3.17) подобен характеристикам в режиме рекуперативного торможения. Исходной точкой характеристик является начало координат. Регулировать интенсивность динамического торможения можно изменяя величину тока возбуждения Iдтв обмотках статора. Чем выше ток, тем больший тормозной момент развивает двигатель. При этом, однако, нужно учитывать, что при токахIдт>I1нначинает сказываться насыщение магнитной цепи двигателя.
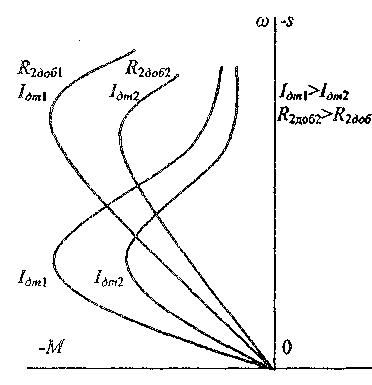
Рис.3.17. Механические характеристики асинхронного двигателя в режиме динамического торможения
Для асинхронных двигателей с фазным ротором регулирование тормозного момента может производиться также введением дополнительного сопротивления в цепь ротора. Эффект от введения добавочного сопротивления аналогичен тому, которое имеет место при пуске асинхронного двигателя: благодаря улучшению cosφ2 повышается критическое скольжение двигателя и увеличивается тормозной момент при больших скоростях вращения
Работу асинхронного двигателя в режиме динамического торможения можно рассматривать как работу трехфазного асинхронного двигателя при питании его постоянным током, т.е. током при частоте f1|=0. Второе отличие заключается в том, что обмотки статора питаются не от источника напряжения, а от источника тока. Следует также иметь в виду, что в схеме динамического торможения ток протекает (при соединении обмоток в звезду) не по трем, а по двум фазным обмоткам.
Энергетически в режиме динамического торможения асинхронный двигатель работает как синхронный генератор, нагруженный на сопротивление роторной цепи двигателя. Вся механическая мощность, поступающая на вал двигателя, при торможении преобразуется в электрическую и идет на нагрев сопротивлений роторной цепи.
Возбуждение асинхронной машины в режиме динамического торможения может осуществляться не только подачей постоянного тока в обмотки статора машины, но также в режиме самовозбуждения путем подключения конденсаторов к цепям статора асинхронной машины, как это показано на рис. 3.19. Такой способ торможения называют конденсаторным торможением асинхронных двигателей. По энергетической сущности этот вид торможения идентичен динамическому торможению, т.к. энергия, поступающая с вала, преобразуется в электрическую и выделяется в виде потерь в роторе двигателя.
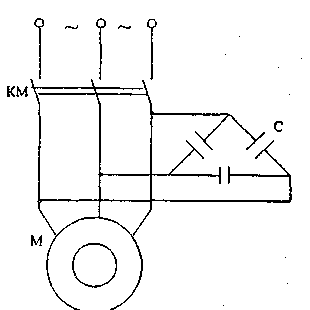
Рис.3.19. Схема включения асинхронного двигателя в режиме динамического торможения с самовозбуждением от конденсаторов
Процесс самовозбуждения асинхронного двигателя происходит следующим образом. Под действием остаточного потока ротора в обмотках статора наводится э.д.с,, под действием которой возникает намагничивающий ток, протекающий через конденсаторы. При этом увеличивается поток машины, следовательно, наводимая э.д.с. и ток намагничивания. Верхняя и нижняя границы режима самовозбуждения и величина тормозного момента зависят от величины емкости конденсаторов. Данный способ торможения применяется для приводов малой мощности (до 5кВт), т.к. требует установки конденсаторов значительного объема.
Торможение противовключением может быть в двух случаях:
в первом, когда при работе двигателя необходимо его экстренно остановить, и с этой целью меняют порядок чередования фаз питания обмоток статора двигателя;
во втором, когда электромеханическая система движется в отрицательном направлении под действием спускаемого груза, а двигатель включается в направлении подъема, чтобы ограничить скорость спуска (режим протягивающего груза).
В обоих случаях электромагнитное поле статора и ротор двигателя вращаются в разные стороны. Скольжение двигателя в режиме противовключения всегда больше 1
 >
1
>
1
В первом случае (см.рис.3.20) двигатель, работавший в т.1, после изменения порядка чередования фаз двигателя переходит в тормозной режим в т. 1, и скорость привода быстро снижается под действием тормозного момента Мти статического моментаМс. При замедлении до скорости, близкой к нулю, двигатель необходимо отключить, иначе он будет разгоняться в противоположном направлении вращения.
Во втором случае после снятия механического тормоза двигатель, включенный в направлении вверх, под действием силы тяжести спускаемого груза будет вращаться в противоположном направлении со скоростью, соответствующей точке 2. Работа в режиме противовключения под действием протягивающего груза возможна при использовании двигателей с фазным ротором. При этом в цепь ротора вводится значительное добавочное сопротивление, которому соответствует характеристика 2 на рис.3.20.
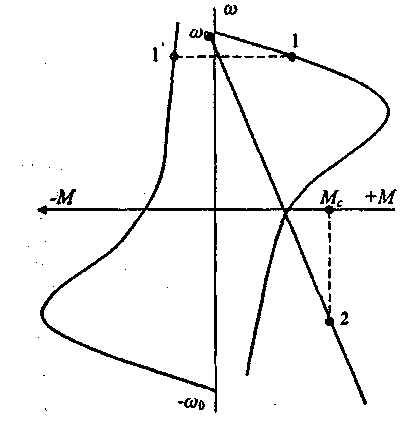
Рис.3.20. Режим противовключения асинхронного двигателя 1, Г — естественные механические характеристики при включении «вперед» и «назад» 2 — механическая характеристика двигателя с фазным ротором со включенным добавочным сопротивлением в цепь ротора.
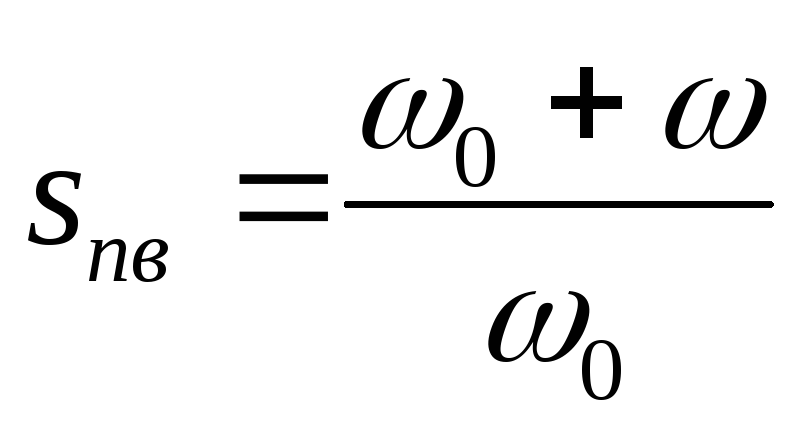
Энергетически режим противовключения крайне неблагоприятен. Ток в этом режиме для асинхронных короткозамкнутых двигателей превосходит пусковой, достигая 10-кратного значения. Потери в роторной цепи двигателя складываются из потерькороткого замыкания двигателя и мощности, которая передается на вал двигателя при торможении
ΔРsnв = Мтω0 + Мт ω0
Для короткозамкнутых двигателей режим противовключения возможен только в течение нескольких секунд. При использовании двигателей с фазным ротором в режиме противовключения обязательно включение в цепь ротора добавочного сопротивления. В этом случае потери энергии остаются такими же значительными, но они выносятся из объема двигателя в роторные сопротивления.
Режимы работы асинхронных двигателей
Режимы работы асинхронных двигателей. Холостой ход. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим. Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется
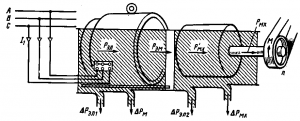 Рис.
260. Энергетическая диаграмма асинхронного
двигателя
Рис.
260. Энергетическая диаграмма асинхронного
двигателя
следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается. Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн. При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cos?1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260). В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ?Рэл1 и ротора ?Рэл2, магнитные ?Рм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ?Рмх от трения в подшипниках и вращающихся частей о воздух. Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмхменьше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора. Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cos?2 (здесь ?2— угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора). Поэтому
M = cмФтI2 cos?2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников. Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем. Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — ?2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге ?2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол ?2. Электромагнитный момент М зависит от скольжения s.
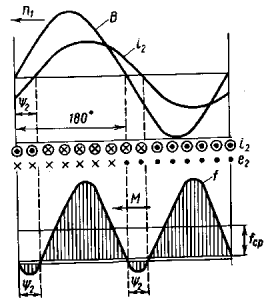 Рис.
261. Распределение индукции В, тока i2 и
электромагнитных сил f, действующих на
проводники асинхронного двигателя
Рис.
261. Распределение индукции В, тока i2 и
электромагнитных сил f, действующих на
проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cos?2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos ?2, вследствие чего активная составляющая тока в обмотке ротора I2cos ?2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos ?2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска. В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре. Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном= 0,7 – 1,8
Ответы ЭМ
АСИНХРОННЫЕ МАШИНЫ
Единица измерения и определяющая формула электрического сопротивления
Ом,  R
= U / I
R
= U / I
Единица измерения и определяющая формула электрической проводимости
Сименс, G = 1 / R
Единица измерения и определяющая формула электрической емкости
Фарада, C = q / U
Единица измерения и определяющая формула магнитного потока
Вебер, Ф = q * R
Единица измерения и определяющая формула магнитной индукции.
Тесла, B = Ф / S
Единица измерения и определяющая формула намагничивающей силы.
Ампер-виток, F = W * I
Выберите правильную формулу для угловой частоты вращения магнитного потока статора.


Выберите правильную упрощенную формулу критического скольжения асинхронной машины.
R ‘2
S к  ± ——————
± ——————
X1 + X ‘2
Во сколько раз уменьшится пусковой ток трехфазного асинхронного двигателя при соединении фаз в звезду вместо треугольника?
В  раз
раз
Выберите правильную упрощенную формулу электромагнитного момента асинхронной машины.
Мэм
= Рэм / 
Выберите правильную формулу для скольжения S.
S = (n1 – n) / n1
Выберите правильную формулу для частоты вращения магнитного потока статора.
n1 = 60 f / p
Почему пусковой момент асинхронного двигателя при введении реостата в фазный ротор увеличивается?
Увеличивается активное сопротивление ротора.
14 Почему номинальный момент асинхронного двигателя при введении реостата в фазный ротор уменьшается при том же скольжении?
+Уменьшается активная составляющая роторного тока
Что нужно сделать, чтобы изменить направление вращения трехфазного асинхронного двигателя с фазным ротором?
Поменять местами два линейных провода двигателя на клеммах трехфазной сети.
Выберите правильную формулу электромагнитной мощности асинхронной машины.
РЭМ = РЭЛ 2 / S
Почему электрическая машина называется асинхронной?
n1 ≠ n
Роторная обмотка короткозамкнутого ротора общепромышленного асинхронного двигателя может быть изготовлена из:
алюминиевого сплава.
Выберите правильную формулу электромагнитной мощности асинхронной машины.
РЭМ = m1 I122 R12 / S
Выберите правильную формулу полной механической мощности асинхронной машины.
РМХ= m1 I122 R12 (1-S) / S
Фазы ротора трехфазного асинхронного двигателя включают:
Звездой.
Выберите правильную формулу мощности на валу асинхронного двигателя.
Р2 = М2 2 n
/ 60
n
/ 60
Выберите правильную формулу для потребляемой активной мощности трехфазного асинхронного двигателя.
P1 = m1 U1 I1 cosϕ1
Какие условия необходимы для образования вращающегося кругового магнитного потока в двухфазном статоре асинхронного двигателя?
Равенство МДС фаз, пространственный сдвиг фаз на 120 электрических градусов, временной сдвиг токов фаз на 1/3 периода.
Какая величина называется перегрузочной способностью асинхронного двигателя?
λ = МК / МН
Сумма мощности потерь асинхронного двигателя ΣР составляет 50% от его полезной мощности Р2. Определить КПД асинхронного двигателя η.
η=67%.
27 Номинальная частота работы асинхронного двигателя с короткозамкнутым ротором, питающегося от промышленной сети переменного тока, n2=950 об/мин. Определить число пар полюсов p статорной обмотки данного двигателя и величину номинального скольжения Sн.
+p = 3, Sн= 0,05.
Асинхронный двигатель с числом пар полюсов р = 1, критическим скольжением Sк = 0,2 работает от промышленной сети переменного тока с нагрузкой на валу со скольжением S1 = 0,1. Определить частоту вращения ротора n2, если нагрузка на валу уменьшилась в 2 раза. Двигатель считать идеальным.
n2 = 2700 об/мин.
n2 = 5400 об/мин.
n2 = 2875 об/мин.
n2 = 3000 об/мин.
n2 = 125 об/мин.
Определить КПД η трехфазного асинхронного двигателя в номинальном режиме, если постоянные потери Р0=15мВт, переменные Рса=35 мВт, а потребляемая из сети мощность Р1=250 мВт.
η = 0,80
Три одинаковых асинхронных двигателя имеют различное номинальное скольжение: Sн1=0,08, Sн2=0,04 и Sн3=0,06. Определить в каком соотношении находятся их КПД η1, η2, η3.
η2 > η3 > η1.
Трехфазный асинхронный двигатель подключен к сети переменного тока с фазным напряжением U1 = 220 В. При номинальной нагрузке активная мощность, потребляемая двигателем из сети Р1 = 250 Вт, а фазный ток при этом равен I1 =0,5 А. Определить cosϕ двигателя при номинальной нагрузке.
.
cosϕ ≈ 0,76.
По каким внешним признакам можно определить асинхронный двигатель с фазным ротором?
На валу расположены три контактных кольца.
Чему равно скольжение двигателя при пуске?
Единице.
При каких условиях однофазный асинхронный двигатель имеет пусковой момент?
При наличии пространственного сдвига обмоток фазы и при наличии временного сдвига между токами обмоток.
С какой целью поверхность станины асинхронного двигателя может выполняться оребренной?
С целью обеспечения необходимой поверхности охлаждения.
В каком режиме работает асинхронная машина, если ее скольжение имеет отрицательное значение?
Генераторный.
Почему КПД двигателя всегда меньше 1?
Имеются активные потери мощности.
Какие потери в асинхронном двигателе называют переменными?
Электрические потери в статорной и роторной обмотках.
Почему магнитопровод статора двигателя выполняют из листовой электротехнической стали?
Пакет статора выполняют из листов электротехнической стали для уменьшения потерь на вихревые токи.
С какой целью в цепь обмотки фазного ротора вводят добавочное активное сопротивление?
Для уменьшения начального пускового тока и увеличения начального пускового момента.
Когда КПД двигателя становится максимальным?
Когда переменные потери становятся равными постоянным.
При каком скольжении будет максимальный момент двигателя?
При критическом скольжении.
Что представляет собой обмотка ротора асинхронного двигателя с короткозамкнутым ротором?
Обмотка ротора выполняется по типу беличьей клетки.
Какое магнитное поле создается при питании одной фазы переменным током?
Пульсирующее.
Назовите способы регулирования частоты вращения асинхронного двигателя с короткозамкнутым ротором?
Изменением числа полюсов обмотки статора, скольжения (изменением величины напряжения питания), частоты и напряжения питания.
.
Какие потери в асинхронном двигателе называют постоянными?
Сумма потерь в стали и механических.
Что понимают под режимом холостого хода двигателя?
Когда на валу отсутствует тормозной момент.
Что представляет собой обмотка ротора асинхронного двигателя с фазным ротором?
Роторная обмотка двигателя с фазным ротором выполняется трехфазной по типу статорной.
При каких условиях m-фазная обмотка создает вращающееся магнитное поле?
Любая m-фазная
обмотка создает вращающееся магнитное
поле, если сдвиг фаз в пространстве и
токов во времени составляет 2 /т.
/т.
Перечислите все способы пуска асинхронных двигателей.
Прямой; при пониженном напряжении; введением добавочного активного сопротивления в цепь ротора; введением добавочного активного сопротивления в цепь статора; частотный.
Что понимают под режимом короткого замыкания двигателя?
Работа при заторможенном роторе.
Чему равна частота тока в роторной обмотке, когда ротор заторможен?
Частоте тока обмотки статора.
Укажите схему включения обмоток асинхронного двигателя, если линейное напряжение в сети 220 В.
 / Y
/ Y
Укажите электротехнические материалы, применяемые в электрических машинах.
Проводниковые, магнитные, изоляционные, материалы щеток.
Какова классификация электрических машин по назначению?
Электромашинные генераторы, электрические двигатели, электромашинные преобразователи, электромашинные компенсаторы, электромашинные усилители, электромеханические преобразователи сигналов.
.
Какова классификация электрических машин по роду тока и принципу действия?
Трансформаторы, асинхронные машины, синхронные машины, коллекторные машины, машины постоянного тока.
Каков принцип создания вращающегося магнитного поля в асинхронных двигателях?
Распределение многофазных обмоток в пространстве, питание обмоток многофазными токами, имеющими сдвиг во времени.
Каковы способы регулирования частоты вращения асинхронных двигателей?
Частотный, изменением числа пар полюсов, изменением питающего напряжения, введением добавочных сопротивлений или ЭДС в цепь фазного ротора.
Как изменятся КПД и коэффициент мощности асинхронного двигателя при а) повышении напряжения б)понижении напряжения в сети?
а)
КПД и Cos  уменьшаются, б) КПД и Cos
уменьшаются, б) КПД и Cos  увеличиваются.
увеличиваются.
Как изменить направление вращения асинхронного двигателя?
Пересоединением к сети двух любых фаз обмотки статора.
Укажите формулы а)скольжения и б)частоты вращения асинхронного двигателя.
а) S = (n1 – n) / n1; б) n = 60 f1 / p.
Как и во сколько раз изменится вращающий момент асинхронного двигателя при переключении обмотки статора «со звезды на треугольник»?
Увеличится в 3 раза.
Определить число полюсов в обмотке статора асинхронного двигателя, если магнитное поле вращается со скоростью 1000 об/ мин.
2 р = 6.
Как изменится частота тока в роторе асинхронного двигателя при увеличении частоты вращения?
Уменьшится.
65 Какому из сопротивлений Rд1< Rд2< Rд3< Rд4 в двигателе с фазным ротором соответствует наименьший пусковой момент?
+МП при Rд1 в цепи фазного ротора.
.
Асинхронный двигатель называется асинхронным из-за несовпадения скоростей вращения:
ротора и магнитного поля статора;
Если номинальная частота вращения асинхронного двигателя nном = 1420 об/мин, то частота вращения магнитного поля составляет:
1500 об/мин;
Двигатель с фазным ротором отличается от двигателя с короткозамкнутым ротором:
наличием контактных колец и щеток;
Направление вращения магнитного поля асинхронного двигателя зависит от:
порядка чередования фаз обмотки статора;
Максимальная частота вращения магнитного поля асинхронного двигателя при промышленной частоте 50 Гц составляет:
3000 об/мин.
Для создания вращающегося магнитного поля асинхронного двигателя необходимы следующие условия:
пространственный сдвиг трех фаз обмотки статора и фазовый сдвиг переменных токов в них;
Механическая характеристика асинхронного двигателя имеет вид:

б)
Укажите неверное утверждение:
существует три основных типа вращающихся машин переменного тока: синхронные,
74 Для создания кругового вращающегося магнитного поля в двухполюсной машине переменного тока необходимо обеспечить пространственный сдвиг между осями обмоток (геометрических градусов) и фазовый сдвиг между токами обмоток (электрических градусов):
???на 120 геометрических градусов и 180 электрических градусов;
Если f – частота питающей сети (1/с), а p – число пар полюсов, то скорость вращения магнитного поля n1 (об/мин) определяется:
Если n1 – скорость вращения поля статора, а n2– скорость вращения ротора, то скольжение асинхронного двигателя s определяется:
 .
.
При работе асинхронной машины в режиме двигателя скольжение изменяется в пределах:
0…1;
При номинальном режиме работы асинхронного двигателя скольжение может составлять величину:
s = 0, 2…0,5;
Чему равна механическая мощность в асинхронном двигателе при неподвижном роторе (s = 1)?
Рмех = 0.
80 Перегрузочная способность асинхронного двигателя определяется как:
+отношение максимального момента к номинальному;.
Что является вращающейся частью в асинхронном двигателе?
Ротор.
В трёхфазную сеть с линейным напряжением 380 В включают трёхфазный двигатель, каждая из обмоток которого рассчитана на 220 В. Как следует соединить обмотки двигателя?
Звездой.
При регулировании частоты вращения магнитного поля n1 асинхронного двигателя были получены следующие величины: 1500; 1000; 750 об/мин. Каким способом осуществлялось регулирование частоты вращения?
.
Реостатное регулирование.
В каких единицах выражается реактивная мощность потребителей?
Вар.
Определить скольжение трехфазного асинхронного двигателя, если известно, что частота вращения ротора n отстает от частоты магнитного поля n1 на 50 об/ мин (n1=1000 об/ мин).
s = 0,05.
Укажите основной недостаток асинхронного двигателя.
Отсутствие дешевых и экономичных устройств для плавного регулирования частоты вращения ротора.
Частота вращения магнитного поля асинхронного двигателя n1=1500об/мин, частота вращения ротора n=1470об/мин. Определить скольжение s.
s = 0,02.
В симметричном трехфазном асинхронном двигателе линейное напряжение Uл = 220 В, линейный ток Ιл = 5А, коэффициент мощности cosφ = 0,8. Определить активную мощность.
Р = 1524 Вт.
С какой целью асинхронный двигатель с фазным ротором снабжают контактными кольцами и щетками?
Для соединения ротора с регулировочным реостатом.
Чему равен КПД асинхронного двигателя, работающего в режиме холостого хода?
0.
 90%.
90%.
 10%
10%
Для ответа на вопрос недостаточно данных.
Для преобразования какой энергии предназначены асинхронные двигатели?
Электрической энергии в механическую.
92 Как называется основная характеристика асинхронного двигателя?
+Механическая характеристика…
Как изменится ток в обмотке ротора асинхронного двигателя при увеличении механической нагрузки на валу?
Увеличится.
Как изменить направление вращения магнитного поля статора асинхронного трёхфазного двигателя?
Достаточно изменить порядок чередования двух фаз из трёх.
Определить частоту вращения магнитного поля ротора n2с асинхронного короткозамкнутого двигателя относительно магнитопровода статора, если число пар полюсов p = 1, частота изменения тока f1 = 50 Гц скольжение S = 0,02.
n2c = 3000 об/мин .
Определить частоту вращения магнитного поля ротора n2р асинхронного короткозамкнутого двигателя относительно магнитопровода ротора, если число пар полюсов p = 1, частота изменения тока f1 = 50 Гц, скольжение S = 0,02.
n2р = 3000 об/мин .
Электромагнитный момент асинхронного двигателя пропорционален…
напряжению обмотки статора в квадрате.
Режим работы электродвигателя, при котором скорость вращения вала равна нулю, и электрическая энергия, поступающая из сети, рассеивается в виде тепла в резисторной цепи называется
режимом короткого замыкания.
Укажите механическую характеристику асинхронного двигателя.
Mэм = f ( S ).
Скорость вращения магнитного поля статора 1500 об/мин, скольжение двигателя 5%. Определите скорость вращения вала ротора.
1425 об / мин.
Какое регулирование скорости вращения асинхронных двигателей позволяет получить скорость вращения выше номинальной?
Частотное.
При каком способе регулирования скорости вращения АД критический момент не изменяется?
При регулировании напряжением.
Укажите правильный ответ. Электротехническая сталь для изготовления сердечников современных асинхронных двигателей:
холоднокатаная анизотропная
Укажите неправильный ответ. Обмотка статора асинхронного двигателя может быть:
комбинированной
Укажите правильный ответ. Обмотки статора асинхронного двигателя соединены:

а б
а — треугольником; б – звездой
Укажите неправильный ответ. Скос пазов на роторе:
увеличивает ЭДС ротора
Укажите неправильный ответ. Асинхронный двигатель с фазным ротором имеет в конструкции:
пусковую обмотку
Укажите правильный ответ. Магнитный поток, созданный трехфазной обмоткой статора изменяется:
по направлению
Укажите правильный ответ. Скольжение S% асинхронного двигателя при частоте вращения магнитного поля n1=3000 об/мин и частоте вращения ротора n= 2940 об/мин:
2%
Укажите правильный ответ. Частота вращения ротора n (об/мин) при скольжении S= 5 %, числе пар полюсов р=2 и частоте питающей сети f1=50 Гц:
1425
Укажите правильный ответ. Скольжение асинхронного двигателя при увеличении нагрузки на валу:
увеличится
112 Укажите правильный ответ. Активное r2s и индуктивное Х2s сопротивления обмотки ротора при скольжении S=5%, если при неподвижном роторе r2= 1 Ом, Х2= 2 Ома:
r2s=0,05 Х2s=0,
113 Укажите правильный ответ. ЭДС в роторе асинхронного двигателя е2s при работе со скольжением S=4%, если при неподвижном роторе е2=20В:
+е2s= 0,8
Укажите правильный ответ. Частота тока в роторе f2 асинхронного двигателя при скольжении S=4% и частоте питающей сети f1= 50 Гц:
f2= 2 Гц
Укажите правильный ответ. Формула для частоты вращения ротора n асинхронного двигателя:
n=n1(1-S)
Укажите правильный ответ. Потребляемая двигателем мощность P1 Вт, при полезной P2= 400 Вт и КПД η=0,8:
500
Укажите правильный ответ. Электрические потери в обмотке ротора рэл Вт, если электромагнитная мощность P эм=700 Вт, скольжение S=4%:
28
Укажите правильный ответ. Скольжение двигателя S%, если электромагнитная мощность Pэм=500 Вт, а полная механическая мощность Рмх=470 Вт:
недостаточно данных для ответа
Укажите правильный ответ. КПД двигателя % при полезной мощности на валу Р2=350 Вт и суммарных потерях в двигателе Σр=150 Вт:
70
Укажите правильный ответ. Потребляемая из сети активная мощность P1 кВт по паспортным данным трехфазного асинхронного двигателя: статор Δ/Y – 220/380 В; I= 6,6/3,8 А; cosφ= 0,75:
1,08
1,88
3,26
5,6
Укажите правильный ответ. Вращающий момент асинхронного двигателя при увеличении подведенного напряжения в 2 раза:
увеличится в 4 раза
Укажите правильный ответ. Вращающий момент асинхронного двигателя при увеличении скольжения от 0 до 1:
сначала увеличивается, потом уменьшается
Укажите правильный ответ. Вращающий момент М Н·м асинхронного двигателя при полезной мощности P2= 5,8 кВт и частоте вращения ротора n=2900 об/мин:
19,1
Укажите правильный ответ. Величины, поддерживаемые постоянными при определении рабочих характеристик:
питающее напряжение и частота
Укажите правильный ответ. Ток холостого хода I0 и коэффициент мощности cosφ0 асинхронного двигателя при увеличении воздушного зазора:
I0 увеличивается, cosφ0 уменьшается
Укажите правильный ответ. Коэффициент мощности асинхронного двигателя cosφ c ростом нагрузки выше номинальной:
уменьшается
Укажите правильный ответ. Скольжение S и частота вращения ротора n при увеличении нагрузки на валу:
S – увеличивается, n – уменьшается
Укажите правильный ответ. Коэффициент мощности трехфазного асинхронного двигателя при полезной мощности P2= 40 кВт, фазном напряжении 220 В, фазном токе 78 А и КПД η= 0,89:
0,87
Определите правильный ответ. Кратность пускового момента:
отношение пускового момента к номинальному
Определите правильный ответ. Кратность пускового тока:
отношение пускового тока к номинальному
Определите правильный ответ. Диапазон кратности пускового момента для короткозамкнутых двигателей мощностью 0,6 — 100 кВт:
4,5 – 7,5
Определите правильный ответ. Изменение пускового момента при пуске переключением «звезда — треугольник»:
уменьшение
в  раз
раз
Определите правильный ответ. Изменение пускового момента при пуске с помощью автотрансформатора с коэффициентом трансформации к:
уменьшение в к2 раз
Определите правильный ответ. Снижение начального пускового тока в питающей сети при пуске переключением «звезда – треугольник»
в 3 раза
Определите правильный ответ. Изменение частоты тока частотного регулирования скорости при постоянстве мощности на валу двигателя и увеличение f1 в 1,73 раза
Определите правильный ответ. Изменение напряжения частотного регулирования скорости при вентиляторной нагрузке и уменьшении вдвое частоты вращения ротора
уменьшение U1 в 4 раза
Определите правильный ответ. Изменение напряжения частотного регулирования скорости при постоянстве момента на валу при увеличении в 1,73 раза частоты вращения ротора:
увеличение U1 в 1,73 раза
Изменение частоты вращения поля и максимального момента при переключении обмотки статора с треугольника на двойную звезду четырехполюсного двигателя:
n1 YY= 3000 об/мин; Мm YY= 0,575 Мm Δ
n1 YY= 3000 об/мин; Мm YY= Мm Δ/0,575
n1 YY= 750 об/мин; Мm YY= 0,575 Мm Δ
n1 YY= 750 об/мин; Мm YY= Мm Δ
Определите правильный ответ. Изменение частоты вращения поля и максимального момента при переключении обмотки статора с двойной звезды на одинарную звезду восьмиполюсного двигателя:
n1 Y= 1500 об/мин; Мm Y= Мm YY
n1 Y= 375 об/мин; Мm Y= 2Мm YY
n1 Y= 375 об/мин; Мm Y= Мm YY
n1 Y= 1500 об/мин; Мm Y= Мm YY/2
Укажите правильный ответ. Величина критического скольжения Sкр на графике М(S) асинхронного двигателя…
пропорционально R2’
Частота вращения магнитного поля асинхронного двигателя 1000 об/мин. Частота вращения ротора 950 об/мин. Определить скольжение.
0,05
Какой из способов регулирования частоты вращения ротора асинхронного двигателя самый экономичный?
Регулирование измерением числа пар полюсов
С какой целью при пуске в цепь обмотки фазного ротора асинхронного двигателя вводят дополнительное сопротивление?
Для получения максимального начального пускового момента.
Определите частоту вращения магнитного поля статора асинхронного короткозамкнутого двигателя, если число пар полюсов равна 1, а частота тока 50 Гц.
3000 об/мин
Как изменить направление вращения магнитного поля статора асинхронного трехфазного двигателя?
Достаточно изменить порядок чередования двух фаз из трёх
Какую максимальную частоту вращения имеет вращающееся магнитное поле асинхронного двигателя при частоте переменного тока 50 Гц?
3000 об/мин
Перегрузочная способность асинхронного двигателя определяется так:
Отношение максимального момента к номинальному
Чему равна механическая мощность в асинхронном двигателе при неподвижном роторе? (S=1)
P=0
Почему магнитопровод статора асинхронного двигателя набирают из изолированных листов электротехнической стали?
Для уменьшения потерь на вихревые токи
§ 10.1. Режим работы асинхронной машины
В соответствии с принципом обратимости электрических машин (см. § В.2) асинхронные машины могут работать как в двигательном, так и в генераторном режимах. Кроме того, возможен еще и режим электромагнитного торможения противовключением.
Двигательный режим. Принцип действия трехфазного асинхронного двигателя рассмотрен в § 6.2. При включенииобмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи (см. рис. 6.4). В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотойn2 < n1в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощностьР1 и передается исполнительному механизму ИМ (рис. 10.1, б).
Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося поля статора:
S = (n1 – n2)/ n1 (10.1)
Скольжение выражают в долях единицы либо в процентах. В последнем случае величину, полученную по (10.1), следует умножить на 100.
Вполне очевидно, что с увеличением нагрузочного момента на валу асинхронного двигателя частота вращения ротора n2уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 <s ≤ 1.
При включении асинхронного двигателя в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен (n2=0). При этом скольжениеs равно единице.
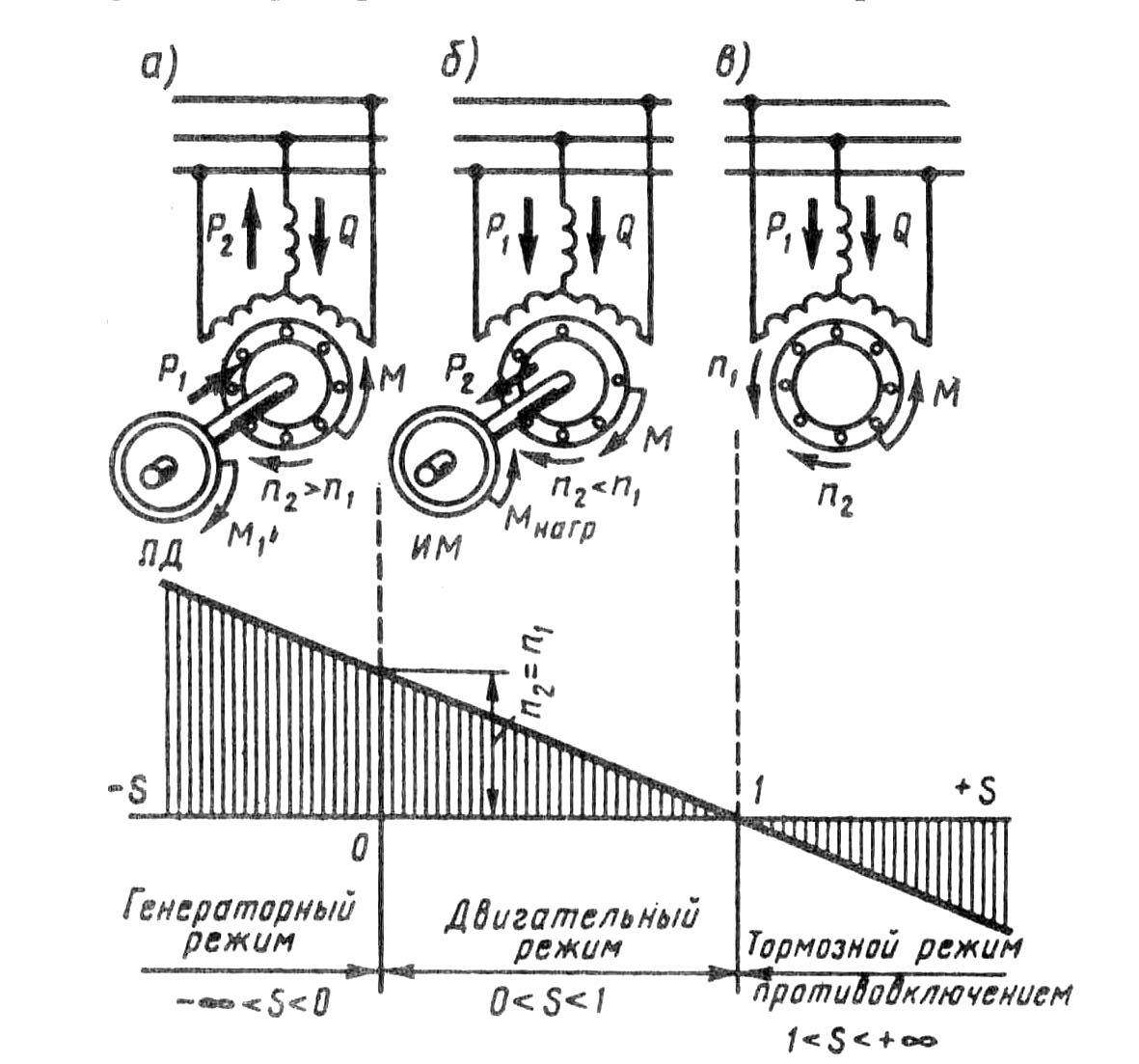
Рис. 10.1. Режимы работы асинхронной машины
В режиме работы двигателя без нагрузки
на валу (режим холостого хода) ротор
вращается с частотой лишь немного
меньшей синхронной частоты вращения
n1 и скольжение
весьма мало отличается от нуля (s≈ 0). Скольжение, соответствующее
номинальной нагрузке двигателя, называют
номинальным скольжением shom. Для асинхронных двигателей
общего назначения shom = 1 8%,
при этом для двигателей большой мощностиsном= 1%, а для
двигателей малой мощностиsном = 8%.
8%,
при этом для двигателей большой мощностиsном= 1%, а для
двигателей малой мощностиsном = 8%.
Преобразовав выражение (10.1), получим формулу для определения асинхронной частоты вращения (об/мин):
n2 = n1(1-s). (10.2)
Генераторный режим. Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя ПД (двигатель внутреннего сгорания, турбина и т. п.), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотойn2> n1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы пой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М1(рис. 10.1, а). В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностьюQтрехфазной сети, в которую включен генератор и да он отдает вырабатываемую активную мощностьР2. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора, т. е. в нем возбуждается вращающееся магнитное поле.
Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне — ∞ < s < 0, т. е. оно может принимать любые отрицательные значения.
Режим торможения противовключением. Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор асинхронной машины под действием сил инерции будет продолжать вращение в прежнем правлении. Другими словами, ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие (рис. 10.1, в). Этот режим работы асинхронной машиины называется электромагнитным торможением противовключением. Активная мощность, поступающая из сети в машину при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение.
В режиме электромагнитного торможения частота вращения ротора является отрицательной, а поэтому скольжение приобретает положительные значения больше единицы:
s = [n1 — (- n2)] / n1 = (n1 + n2) /n1 > 1.(10.3)
Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне 1 < s < + ∞ , т. е. оно может принимать любые положительные значения больше единицы.
Обобщая изложенное о режимах работы асинхронной машины, можно сделать вывод: характерной особенностью работы асинхронной машины является неравенство частот вращения магнитного поля статора n1 и ротора n2, т. е. наличие скольжения, так как только в этом случае вращающееся магнитное поле наводит в обмотке ротора ЭДС и на роторе возникает электромагнитный момент. При этом каждому режиму работы асинхронной машины соответствует определенный диапазон изменений скольжения, а следовательно, и частоты вращения ротора.
Из рассмотренных режимов работы наибольшее практическое применение получил двигательный режим асинхронной машины, т. е. чаще используют асинхронные двигатели, которые составляют основу современного электропривода, выгодно отличаясь от других электродвигателей простотой конструкции и высокой надежностью. Поэтому теорию асинхронных машин принято излагать применительно к асинхронным двигателям.
1 Краткие теоретические сведения
Содержание
Цель работы………………………………………………………………… | 2 |
1 Краткие теоретические сведения……….………………………………. | 2 |
2 Порядок выполнения работы…….…………….…………….………….. | 5 |
3 Расчётная часть…………………………………………………………… | 7 |
4 Графики……………….…………….…………….….…………….…….. | 9 |
5 Контрольные вопросы…………….……………………………………… | 12 |
Список использованных источников ……………………………………… | 15 |
Цель работы
Ознакомиться с устройством и принципом действия трехфазного асинхронного двигателя с короткозамкнутым ротором и исследовать влияние напряжения на фате статора на его характеристики.
1)Устройство, принцип действия асинхронного двигателя.
Асинхронный двигатель – это машина переменного тока. Слово “асинхронный” означает не одновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
Статор – неподвижная часть машины. Его сердечник с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных двигателях обмотка трехфазная. Фазы обмотки могут соединяться в звезду или в треугольник в зависимости от величины напряжения сети.
Ротор – вращающаяся часть двигателя. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали. В пазах ротора укладывают обмотку. В зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни, соединенные с торцов кольцами из этого же материала (“беличья клетка”).
У фазного ротора в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал двигателя. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные или медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электрической энергии в механическую в асинхронном двигателе осуществляется посредством вращающегося магнитного поля. Необходимыми условиями возбуждения вращающегося магнитного поля являются:
Первое требование удовлетворяется соответствующим расположением намагничивающих катушек на магнитопроводе статора. Оси фаз обмотки смещены в пространстве на угол 120°. Второе условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
Токи
фаз обмотки создают магнитное поле,
вращающееся относительно статора с
частотой  ,
об/мин, которая называется синхронной
частотой вращения двигателя:
,
об/мин, которая называется синхронной
частотой вращения двигателя:
где  — частота тока сети, Гц,
— частота тока сети, Гц,
р – число пар полюсов магнитного поля.
При
стандартной частоте тока сети  ,
частота вращения поля
,
частота вращения поля
р | 1 | 2 | 3 | 4 | 5 | 6 |
| 3000 | 1500 | 1000 | 750 | 600 | 500 |
 ,
об/мин
,
об/минВращаясь, поле пересекает проводники ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Скорость вращения ротора в двигательном режиме асинхронной машины всегда меньше скорости вращения поля, т.е. ротор “отстает” от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения:
где n– частота вращения ротора, об/мин.
Для асинхронных двигателей скольжение может изменяться в пределах от 1 (пуск) до величины, близкой к 0 (холостой ход).
2) Пуск асинхронных двигателей.
При пуске двигателя должны выполнятся следующие требования:
1. Малая величина пускового тока;
2. Достаточный по величине пусковой момент;
3. Плавное нарастание скорости;
4. Простота и экономичность пуска.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска.
Для двигателей с короткозамнутым ротором используют прямой пуск и пуск при пониженном напряжении.
1. Прямой пуск.При этом обмотка статора включается непосредственно в сеть на полное напряжение. Прямой пуск допустим только для асинхронных двигателей с короткозамкнутым ротором малой и средней мощности (до 15-20 кВт). Однако при значительной мощности питающей сети этот способ можно распространить на двигатели большей мощности (примерно до 50 кВт).
2. Пуск
при пониженном напряжении.Пусковой ток двигателя пропорционален
напряжению на фазах обмотки статора ,
поэтому уменьшение напряжения
,
поэтому уменьшение напряжения сопровождается соответствующим
уменьшением пускового тока. Однако
такой способ приводит к уменьшению
начального пускового момента, который
пропорционален квадрату напряжения на
фазах обмотки статора. Ввиду значительного
снижения пускового момента указанный
способ пуска применим только при малых
нагрузках на валу.
сопровождается соответствующим
уменьшением пускового тока. Однако
такой способ приводит к уменьшению
начального пускового момента, который
пропорционален квадрату напряжения на
фазах обмотки статора. Ввиду значительного
снижения пускового момента указанный
способ пуска применим только при малых
нагрузках на валу.
Имеется несколько
способов понижения напряжения  в момент пуска:
в момент пуска:
а) при легком пуске асинхронных двигателей средней мощности, которые нормально работают при соединении фаз обмотки статора треугольником, применяют снижение напряжения на зажимах этих фаз переключением их в звезду;
б) при любом типе соединения фаз обмотки статора понизить напряжение можно с помощью реактора (трехфазной индуктивной катушки), включенного последовательно в обмотку статора. Менее экономично снижать напряжение на статоре последовательным включением резисторов, т.к. они при этом сильно нагреваются и возникают дополнительные потери электрической энергии;
в) для двигателей большой мощности снижать напряжение целесообразно при помощи понижающего трехфазного автотрансформатора. Этот способ лучше предыдущего, но значительно дороже. После того, как ротор двигателя разгонится, и ток спадает, на обмотку статора подается полное напряжение сети.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора. Пусковой реостат снижает величину начального пускового тока и одновременно увеличивает начальный пусковой момент, который может достигнуть величины, близкой к максимальному моменту. По мере разгона двигателя пусковой реостат выводят.
3) Регулирование частоты вращения и реверсирование асинхронного двигателя.
Регулирование – это принудительное изменение частоты вращения при постоянной нагрузке на валу. Недостатком асинхронных двигателей является плохая регулировочная способность. Но все же некоторые возможности регулирования имеются.
Из формулы скольжения можно получить выражение частоты вращения ротора асинхронного двигателя:
Из этого равенства
следует, что изменять частоту вращения
можно следующими способами: изменением
частоты тока статора  ,
числа пар полюсов р и скольжения s.
Частоту вращения ротора можно регулировать
и изменением напряжения питания
,
числа пар полюсов р и скольжения s.
Частоту вращения ротора можно регулировать
и изменением напряжения питания .
Рассмотрим эти способы.
.
Рассмотрим эти способы.
Регулирование
изменением частоты тока статора  .Частотное регулирование асинхронных
двигателей является наиболее перспективным
в связи с наличием простых и надежных
трехфазных тиристорных преобразователей
частоты, которые включают между
промышленной сетью и асинхронным
двигателем. При регулировании частоты
.Частотное регулирование асинхронных
двигателей является наиболее перспективным
в связи с наличием простых и надежных
трехфазных тиристорных преобразователей
частоты, которые включают между
промышленной сетью и асинхронным
двигателем. При регулировании частоты скорость двигателя можно плавно изменять
так, что ее максимальное значение будет
в десятки или сотни раз превышать
минимальные.
скорость двигателя можно плавно изменять
так, что ее максимальное значение будет
в десятки или сотни раз превышать
минимальные.
Регулирование изменением числа пар полюсов р.Переключение числа пар полюсов многоскоростных асинхронных двигателей обеспечивает ступенчатое регулирование частоты вращения ротора и отличается экономичностью. Оно применяется в машинах со специальным исполнением обмотки статора, допускающим переключение ее катушек на различное число пар полюсов, а также, когда в пазах магнитопровода статора размещено несколько поочередно включаемых обмоток, выполненных на разное число пар полюсов, например, р= 1 и р = 2.
Регулирование
изменением подводимого напряжения.Понижение напряжения вызывает снижение
скорости ротора. Уменьшать напряжение можно включением в цепь статора реостатов,
автотрансформаторов или регулируемых
дросселей. Данный метод применяется
только у двигателей малой мощности, так
как при уменьшении напряжения уменьшается
максимальный момент двигателя, который
пропорционален квадрату напряжения.
Снижение максимального момента уменьшает
запас по устойчивости работы двигателя.
Кроме того диапазон регулирования
частоты вращения сравнительно небольшой.
можно включением в цепь статора реостатов,
автотрансформаторов или регулируемых
дросселей. Данный метод применяется
только у двигателей малой мощности, так
как при уменьшении напряжения уменьшается
максимальный момент двигателя, который
пропорционален квадрату напряжения.
Снижение максимального момента уменьшает
запас по устойчивости работы двигателя.
Кроме того диапазон регулирования
частоты вращения сравнительно небольшой.
Перечисленные выше способы регулирования применяются для асинхронных двигателей с короткозамкнутым ротором.
У двигателей с фазным ротором частота вращения регулируется изменением скольжения. Для этого в обмотку ротора включают регулировочный реостат. При увеличении сопротивления регулировочного реостата скольжение увеличивается, а частота вращения уменьшается.
Этот способ обеспечивает плавное изменение частоты вращения.
Изменение направления вращения ротора называется реверсированием. Для реверса необходимо поменять местами два провода на зажимах статорной обмотки двигателя.
Оборудование электрической установки
Лабораторная установка для исследования свойств асинхронного двигателя с короткозамкнутым ротором состоит из трех электрических машин : асинхронного двигателя с короткозамкнутым ротором, нагрузочного генератора НГ, тахогенератора ТГ.
Двигатель пускается в ход при помощи автоматического выключателя Q. При этом фазы обмотки статора соединяются в звезду. При нажатии кнопки ∆ срабатывает контактор К. Нормально открытые контакты 1К — ЗК замыкаются, а нормально закрытые контакты 4К — 6К размыкаются, и обмотка статора двигателя соединяется по схеме треугольник. Нажатием кнопки фазы обмотки статора вновь переключаются в звезду. В цепь статора двигателя включен вольтметр V, амперметр А и трехфазный двухэлементный ваттметр kW
В качестве нагрузки для двигателя используется генератор постоянного, тока с независимым возбуждением (НГ). В цепь якоря нагрузочного генератор включен реостат RH и амперметр М, проградуированный в единицах момента, для определения моментов нагрузки, так как при наличии дополнительных полюсов, компенсирующих реакцию якоря, и неизменном токе возбуждения генератора НГ электромагнитный момент генератора, являющийся тормозным, линейно зависит от тока якоря:

где  —
постоянная машины по моменту.
—
постоянная машины по моменту.
Тахогенератор предназначен для измерения частоты вращения двигателя. Он представляет собой маломощный генератор, постоянного тока с независимым возбуждением, работающий в режиме холостого хода. ЭДС тахогенератора при постоянном магнитном потоке возбуждении линейно зависит от частоты вращения
где СЕ — постоянная тахогенератора по ЭДС. Поэтому шкала вольтметра n, измеряющего ЭДС, проградуирована в об/мин.
12.5. Электродвижущие силы и токи в обмотках статора и ротора
Проводники трехфазной обмотки статора, уложенные в пазы статора, соответствующим образом соединяются между собой на лобовых частях машины, причем соединительные проводники на лобовых частях машины отгибают таким образом, чтобы ротор при сборке мог пройти в расточку статора.
Если вращающийся магнитный поток Ф для любого момента времени распределен в воздушном зазоре по синусоидальному закону, то в каждом витке статорной обмотки, пронизываемой этим потоком, наводится э. д. с., действующее значение которой Eв = 4,44fФm. Так как каждая фаза обмотки статора состоит из w витков, то э. д. с. фазы суммируется из э. д. с. отдельных витков. Для наилучшего использования активных материалов, а также для улучшения формы поля в воздушном зазоре (близкой к синусоиде) применяют так называемые распределенные обмотки, в которых на каждую фазу обмотки приходится несколько витков, лежащих в различных пазах. Распределенные обмотки лучше охлаждаются.
На рис. 12.9, а показана
схема статора двухполюсной машины с
трехфазной обмоткой, каждая фаза
которой расположена в шести пазах (q =
3). Если число пазов q, приходящееся на
полюс и фазу, больше единицы, то э. д. с.,
наводимые в проводниках фазы (так как
они лежат в соседних пазах), оказываются
взаимно сдвинутыми по фазе (рис. 12.9, б).
На рисунке —
векторы э. д. с. проводников, лежащих в
пазах одной и той же фазы; Е — э. д. с.
фазы (рис. 12.9, б), которая меньше
арифметической суммы э, д. с.E1,
E2,
E3 отдельных проводников фазы.
—
векторы э. д. с. проводников, лежащих в
пазах одной и той же фазы; Е — э. д. с.
фазы (рис. 12.9, б), которая меньше
арифметической суммы э, д. с.E1,
E2,
E3 отдельных проводников фазы.
Отношение геометрической суммы э. д. с., индуцированных в отдельных проводниках фазы, к их алгебраической сумме называют коэффициентом распределения обмотки kp, который всегда меньше единицы. Этот коэффициент учитывает уменьшение э. д. с. вследствие пространственного распределения обмотки.
Выражение  относится
к обмотке с диаметральным шагом,
когдаy
= τ (рис. 12.9, а). В этом случае виток
пронизывается полным максимальным
потоком одного полюса. Для экономии
меди и уменьшения аксиальных размеров
машины, а также для приближения формы
кривой э. д. с. к синусоиде применяют
обмотки с укороченным шагом у < 1. В
таких обмотках каждый виток пронизывается
магнитным потоком, несколько меньшим
потока одного полюса, вследствие чего
э. д. с. каждого витка обмотки меньше э.
д. с. витка обмотки с диаметральным
шагом.
относится
к обмотке с диаметральным шагом,
когдаy
= τ (рис. 12.9, а). В этом случае виток
пронизывается полным максимальным
потоком одного полюса. Для экономии
меди и уменьшения аксиальных размеров
машины, а также для приближения формы
кривой э. д. с. к синусоиде применяют
обмотки с укороченным шагом у < 1. В
таких обмотках каждый виток пронизывается
магнитным потоком, несколько меньшим
потока одного полюса, вследствие чего
э. д. с. каждого витка обмотки меньше э.
д. с. витка обмотки с диаметральным
шагом.
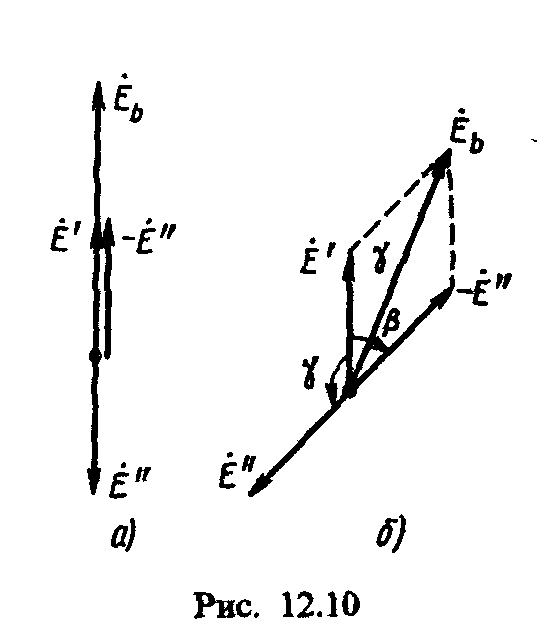
Э. д. с. витка
обмотки с диаметральным шагом  где 2Е — э. д. с. витка, равная векторной
разности э. д. с. его проводников:
где 2Е — э. д. с. витка, равная векторной
разности э. д. с. его проводников: (рис. 12.10, а), так как при образовании
витка его стороны соединяют встречно,
т. е. конец одного проводника — с концом
другого проводника. При прямом соединении,
когда конец одного проводника
соединяется с началом другого, э. д. с.
витка, равная векторной сумме э. д. с.
активных проводников витка, была бы
равна нулю. Э. д. с. витка обмотки с
укороченным шагом несколько меньше
двойного значения э. д. с., индуцированной
в одной активной стороне витка, так как
сдвиг между Е’ и Е» меньше 2π (рис.
12.10, б). Этот сдвиг
(рис. 12.10, а), так как при образовании
витка его стороны соединяют встречно,
т. е. конец одного проводника — с концом
другого проводника. При прямом соединении,
когда конец одного проводника
соединяется с началом другого, э. д. с.
витка, равная векторной сумме э. д. с.
активных проводников витка, была бы
равна нулю. Э. д. с. витка обмотки с
укороченным шагом несколько меньше
двойного значения э. д. с., индуцированной
в одной активной стороне витка, так как
сдвиг между Е’ и Е» меньше 2π (рис.
12.10, б). Этот сдвиг
 (12.9)
(12.9)
Э. д. с. витка при укороченном шаге определяется по формуле
 (12.10)
(12.10)
где 
Обычно формулу для определения э. д. с. витка при укороченном шаге записывают следующим образом:
 (12.11)
(12.11)
где ky = sin (γ/2) = Eв/(2Е) — коэффициент укорочения, который учитывает, что при у < τ э. д. с. активных проводников, образующих виток, складываются не арифметически, а геометрически, причем ky < 1 при у < τ и ky = 1 при у = τ.
П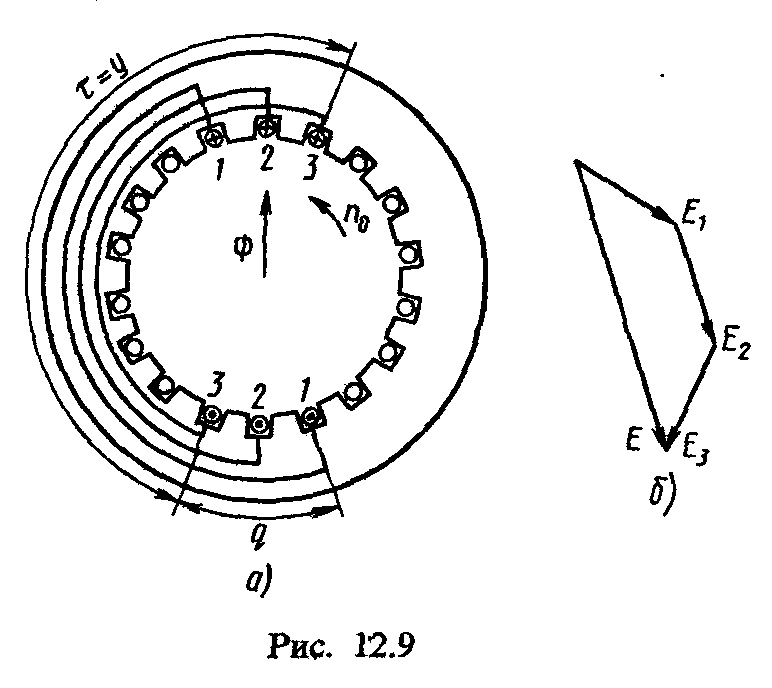
 роизведение
коэффициента распределения обмотки на
коэффициент укорочения называетсяобмоточным
коэффициентом:
kоб = kpky.
Обмоточный коэффициент учитывает
уменьшение э. д. с. фазы вследствие
пространственного распределения обмотки
и укорочения шага. Обычно этот коэффициент
для статорных обмоток асинхронных машин
составляет 0,92-0,96.
роизведение
коэффициента распределения обмотки на
коэффициент укорочения называетсяобмоточным
коэффициентом:
kоб = kpky.
Обмоточный коэффициент учитывает
уменьшение э. д. с. фазы вследствие
пространственного распределения обмотки
и укорочения шага. Обычно этот коэффициент
для статорных обмоток асинхронных машин
составляет 0,92-0,96.
Итак, э. д. с. одной фазы обмотки статора определяется формулой
 (12.12)
(12.12)
где ko61 — обмоточный коэффициент обмотки статора; Фm — амплитудное значение основного магнитного потока, сцепленного с обмотками статора и ротора; w1 — число витков в одной фазе статора.
По аналогии с (12.12) можно записать формулу для определения э. д. с. фазы обмотки ротора:
 (12.13)
(12.13)
где koб2 — обмоточный коэффициент обмотки ротора; w2 — число витков в одной фазе обмотки ротора.
Из (12.13) находим э. д. с. в заторможенном роторе, т. е. при n = 0 (s = 1):
 (12-14)
(12-14)
Следовательно, формулу (12.13) можно переписать в виде
 (12.15)
(12.15)
Из выражения (12.15) следует, что э. д. с. вращающегося ротора при номинальной нагрузке составляет несколько процентов от э. д..с. неподвижного ротора, так как скольжение s = 0,02 — 0,05; кроме того, э. д. с. ротора пропорциональна скольжению и достигает максимального значения при заторможенном роторе (s = 1).
Отношение э. д. с. статора и заторможенного ротора
 (12.16)
(12.16)
называют коэффициентом трансформации э. д. с. На практике при обмоточных коэффициентах, равных 0,92—0,96, приближенно считают
 (12.17)
(12.17)
как это имеет место в трансформаторах.
При заторможенном роторе наглядно прослеживается аналогия асинхронной машины с трансформатором, т. е. в этом случае частота э. д. с. ротора равна частоте э. д. с. статора (частоте сети, в которую включен асинхронный двигатель).
Рассмотрим режим, когда обмотка ротора разомкнута. В этом случае ток в роторе отсутствует и не оказывает влияния на электромагнитные процессы в статоре. Этот режим, как и в трансформаторе, называют холостым ходом. При холостом ходе для каждой фазы обмотки статора, подобно тому, как для первичной обмотки трансформатора при холостом ходе, можно записать уравнение
 (12.18)
(12.18)
где Ul — напряжение сети; E1 — э. д. с., которая наводится вращающимся
магнитным потоком Ф, пересекающим
обмотки статора и ротора;  —
э. д. с., наводимая потоком рассеяния
Фσ1m обмотки статора; I0r
— падение напряжения в обмотке статора
при прохождении тока холостого хода
I0.
—
э. д. с., наводимая потоком рассеяния
Фσ1m обмотки статора; I0r
— падение напряжения в обмотке статора
при прохождении тока холостого хода
I0.
Согласно (12.18), можно построить векторную диаграмму асинхронной машины (рис. 12.11). Построение диаграммы аналогично построению диаграммы трансформатора при холостом ходе, только в асинхронных машинах ток холостого хода (из-за наличия воздушного зазора между статором и ротором) значительно больше, чем в трансформаторах. В асинхронных двигателях ток холостого хода составляет 20—40% от номинального тока, а в трансформаторах — 0,5 — 3%. Для уменьшения тока холостого хода асинхронные машины стремятся выполнять с минимальными воздушными зазорами. Так, например, у асинхронных двигателей мощностью до 5 кВт размер воздушных зазоров составляет 0,1—0,3 мм.
Индуцированная в обмотке ротора э. д. с. E2s вызывает в ней ток, который необходим для создания вращающего момента. Так как обмотка короткозамкнутого или фазного ротора представляет собой замкнутую цепь, то ток в фазе роторной обмотки
 (12.19)
(12.19)
где Z2 — сопротивление цепи фазы ротора; r2 — активное сопротивление фазы ротора, практически не зависящее от частоты; X2s — индуктивное сопротивление фазы вращающегося ротора, существенно зависящее от частоты:
 (12.20)
(12.20)
Итак, чем больше частота вращения двигателя, т. е. меньше его скольжение, тем меньше индуктивное сопротивление ротора.
Подставив значение X2s из выражения (12.20) в формулу (12.19), получим для тока ротора
И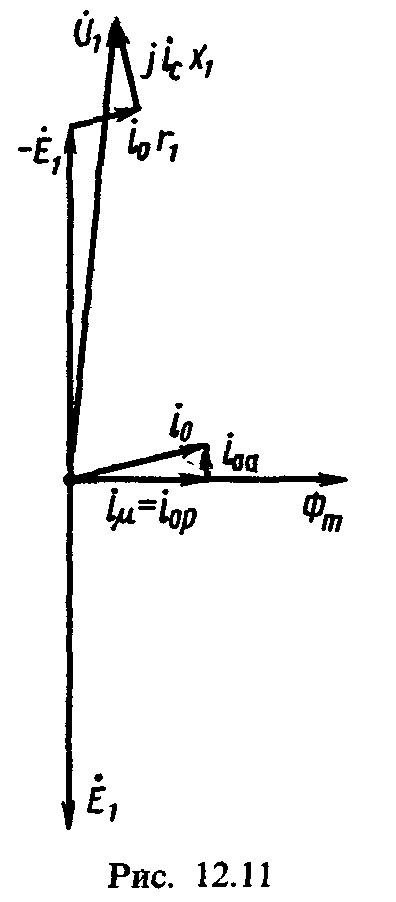 з
(12.21) следует, что с увеличением скольжения
асинхронного двигателя, т. е. с уменьшением
частоты его вращения за счет увеличения
нагрузки, ток ротора возрастает и
достигает наибольшего значения при
s = 1, т. е. когда ротор находится в
неподвижном состоянии. Это связано
с тем, что с увеличением скольжения
возрастает э. д. с. ротора (Е2 = = Es). Одновременно с ростом скольжения
увеличивается индуктивное сопротивление
ротора Х2s,
= = sX2,
благодаря чему ток ротора по мере роста
скольжения увеличивается менее заметно,
чем э. д. с.
з
(12.21) следует, что с увеличением скольжения
асинхронного двигателя, т. е. с уменьшением
частоты его вращения за счет увеличения
нагрузки, ток ротора возрастает и
достигает наибольшего значения при
s = 1, т. е. когда ротор находится в
неподвижном состоянии. Это связано
с тем, что с увеличением скольжения
возрастает э. д. с. ротора (Е2 = = Es). Одновременно с ростом скольжения
увеличивается индуктивное сопротивление
ротора Х2s,
= = sX2,
благодаря чему ток ротора по мере роста
скольжения увеличивается менее заметно,
чем э. д. с.
Если, например, э. д. с. при пуске двигателя, когда s = 1, возрастает по сравнению с рабочими условиями в несколько десятков раз, то ток при этом будет больше номинального примерно в 5 —7 раз.
Сдвиг фаз ψ2 между э. д. с. E2s и током I2 увеличивается с ростом скольжения, что следует из выражения
 (12.22)
(12.22)
следовательно, с ростом скольжения уменьшается коэффициент мощности двигателя:
 (12.23)
(12.23)
Как было показано
в § 12.4, ротор асинхронного двигателя
вращается в ту же сторону, что и
магнитное поле статора. Если обмотка
ротора замкнута, то через нее проходит
ток, изменяющийся с частотой f2.
Этот ток создает магнитный поток Ф2,
который вращается относительно
ротора с частотой nф2 = 60f2/р
= 60f1s/p
= sn0.
Если же сам ротор вращается с частотой
n,
то частота вращения магнитного поля
ротора 
Таким образом, магнитное поле ротора вращается в пространстве с той же частотой, что и поле статора. Следовательно, равенство частот вращения полей статора и ротора может быть обеспечено равенством числа пар их полюсов. В этом случае поля ротора и статора будут относительно друг друга неподвижны и взаимодействуют между собой, подобно тому, как это происходит в трансформаторе, обеспечивая передачу мощности из статора в ротор. Число фаз обмоток статора и ротора может быть различным.
Итак, в асинхронной машине магнитное поле, вращающееся с частотой n0, образуется в результате взаимодействия полей статора и ротора. Это поле обеспечивает электромагнитную связь между статором и ротором, осуществляя обмен энергией между ними, подобно тому, как рабочий магнитный поток в трансформаторе осуществляет передачу энергии из первичной обмотки во вторичную. В результате ток ротора I2 создает компенсирующую его составляющую тока статора I2’ и результирующий магнитный поток остается практически таким же, как при режиме холостого хода. Следовательно, в асинхронном двигателе, как и в трансформаторе, результирующий (рабочий) магнитный поток при изменении режима работы изменяется незначительно, т. е. практически Ф = const. Поэтому для м. д. с. асинхронной машины справедливо равенство
 (12.25)
(12.25)
где m1 и m2 — число фаз обмотки статора и ротора, причем для обмотки типа «беличья клетка» число фаз ротора равно числу стержней. Разделив обе части равенства (12.25) на m1kоб1w1, получим

где  —коэффициент
трансформации токов асинхронной
машины; I’2 = I2/ki — приведенный ток роторной обмотки,
создающий ту же м. д. с., что и ток I2,
при обмотке ротора, подобной обмотке
статора (с тем же числом фаз, обмоточным
коэффициентом и числом витков).
—коэффициент
трансформации токов асинхронной
машины; I’2 = I2/ki — приведенный ток роторной обмотки,
создающий ту же м. д. с., что и ток I2,
при обмотке ротора, подобной обмотке
статора (с тем же числом фаз, обмоточным
коэффициентом и числом витков).
Из (12.26) находим ток статора:
(12.27)
Рассмотрим режим работы асинхронной машины с заторможенным ротором, включив в цепь обмотки ротора сопротивление нагрузки ZH. В этом случае асинхронная машина работает как трансформатор, однако в качестве трансформатора ее использовать нецелесообразно, так как она имеет худшие эксплуатационные характеристики (меньший к. п. д., больший ток холостого хода и пр.), а также имеет большую стоимость. Иногда в некоторых специальных устройствах (фазорегуляторах, индукционных регуляторах) асинхронные машины используют в режиме работы трансформатора, т. е. при заторможенном роторе.
Векторная диаграмма асинхронной машины с заторможенным ротором (рис. 12.12) идентична векторной диаграмме трансформатора при нагрузке, и ее построение в принципе производится на основании тех же уравнений:
 (12.28)
(12.28)
С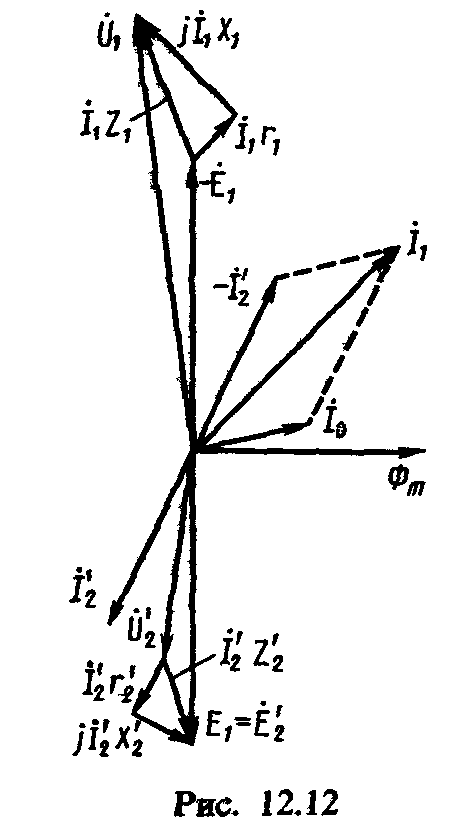 хема
замещения асинхронной машины при
заторможенном роторе (рис. 12.13) аналогична
схеме замещения трансформатора, но ее
параметры определяются другими
коэффициентами приведения, а именно:
хема
замещения асинхронной машины при
заторможенном роторе (рис. 12.13) аналогична
схеме замещения трансформатора, но ее
параметры определяются другими
коэффициентами приведения, а именно:

где произведения kikE принято называть коэффициентами приведения сопротивлений.
С опротивлениеr’2 определяется из условия равенства
электрических потерь
опротивлениеr’2 определяется из условия равенства
электрических потерь а сопротивление Х’2 — из равенства относите-
а сопротивление Х’2 — из равенства относите-
льных индуктивных
падений напряжений  Следует отметить, что при определении
коэффициентов kE и ki для коротко-замкнутой обмотки ротора
типа «беличья клетка» принимают w2 = 0,5, kоб2 = 1, m2 = Z2,
где Z2 — число пазов ротора.
Следует отметить, что при определении
коэффициентов kE и ki для коротко-замкнутой обмотки ротора
типа «беличья клетка» принимают w2 = 0,5, kоб2 = 1, m2 = Z2,
где Z2 — число пазов ротора.