


GPS-антенна: описание, назначение, характеристики
GPS-антенна – это один из важнейших элементов беспроводной инфраструктуры. От верного выбора и правильной эксплуатации упомянутых устройств зависит работоспособность всей системы, поскольку они определяют максимальную дальность работы приборов, пропускную способность каналов связи и т.д.

Неверно смонтированная GPS-антенна при благоприятных погодных условиях способна обеспечивать довольно сносную связь, но во время дождя или снегопада будет давать сбои либо же вообще перестанет работать. Несмотря на кажущуюся простоту, проектирование антенн иногда требует больше сил и средств, чем создание сложных электронных устройств.
Классификация GPS-антенн довольно короткая. Они бывают:
- активными и пассивными;
- внешними и монтируемыми на плату устройства (по типу монтажа).
На сегодняшний день предлагается огромный выбор антенн, но не стоит забывать, что каким бы надежным и мощным ни было устройство, если с ним используется некачественная GPS-антенна, то технические характеристики данной системы будут далеки от заявленных. Работа такого прибора не принесет пользователю ожидаемого результата.

Активная GPS-антенна представляет собой стандартную пассивную модель со встроенным усилителем. Такие устройства используют в GPS-приемниках, в которых отсутствуют внутренние аппараты, в таком случае на корпус прибора выводится разъем для внешней антенны. Активные устройства превосходят пассивные экземпляры в чувствительности, они повышают соотношение уровня сигнала к уровню шума, снижают влияние каких бы то ни было помех. Сигнал от пассивных антенн сильно подвержен воздействию электромагнитного излучения, и как следствие, доходит до приемника в искаженном и ослабленном состоянии. Сигнал активных устройств отличается гораздо большей амплитудой, нежели у пассивных. К выбору GPS-антенны следует подходить индивидуально, принимая во внимание тип приемника, ведь некоторые приборы уже могут содержать встроенный антенный усилитель.
Производители GPS-антенн предлагают широкий выбор внешних и внутренних антенн. Они отличаются по напряжению питания (3-5В), имеют кроме усилителей сигнала и полосовые фильтры, которые вырезают посторонние сигналы вне пределов требуемого диапазона частоты. GPS-антенна (автомобильная) работает на частоте 1575,42±3 МГц. С учетом полосового фильтра ширина пропускаемой полосы составляет 10 МГц. Среднее значение коэффициента усиления антенн составляет 4 дБ, рассеиваемая мощность 1 Вт. Такие устройства в состоянии обеспечивать надежную работу в температурном режиме от -40 до +100 градусов по Цельсию при относительной влажности воздуха 100 процентов. Антенны комплектуются различными типами кабелей, с разными видами разъемов, что позволяет использовать их с любыми типами приемных устройств. Длина кабеля может достигать пяти метров, из-за чего заметно упрощается установка GPS-антенны.

Подведя итог, отметим, что современные устройства оптимизированы по различным критериям решений, таким как высокие коэффициенты усилений, низкое энергопотребление, малая цена, малые габаритные размеры.
Принцип и схема работы системы спутниковой навигации GPS
Спутниковая навигация GPS давно уже является стандартом для создания систем позиционирования и активно применяется в различных трекерах и навигаторах. В проектах Arduino GPS интегрируется с помощью различных модулей, не требующих знания теоретических основ. Но настоящему инженеру должно быть интересно разобраться со принципом и схемой работы GPS, чтобы лучше понимать возможности и ограничения этой технологии.
Схема работы GPS
GPS – это спутниковая навигационная система, разработанная Министерством обороны США, которая определяет точные координаты и время. Работает в любой точке Земли в любых погодных условиях. GPS состоит из трех частей – спутников, станций на Земле и приемников сигнала.
История GPS
 Идея создания спутниковой навигационной системы зародилась еще в 50-е годы прошлого столетия. Американская группа ученых, наблюдающая за запуском советских спутников, заметила, что при приближении спутника частота сигнала увеличивается и уменьшается при его отдалении. Это позволило понять, что возможно измерить положение и скорость спутника, зная свои координаты на Земле, и наоборот. Огромную роль в развитии навигационной системы сыграл запуск спутников на низкую околоземную орбиту. А в 1973 году была создана программа «DNSS» («NavStar»), по этой программе спутники запускались на среднюю околоземную орбиту. Название GPS программа получила в том же 1973 году.
Идея создания спутниковой навигационной системы зародилась еще в 50-е годы прошлого столетия. Американская группа ученых, наблюдающая за запуском советских спутников, заметила, что при приближении спутника частота сигнала увеличивается и уменьшается при его отдалении. Это позволило понять, что возможно измерить положение и скорость спутника, зная свои координаты на Земле, и наоборот. Огромную роль в развитии навигационной системы сыграл запуск спутников на низкую околоземную орбиту. А в 1973 году была создана программа «DNSS» («NavStar»), по этой программе спутники запускались на среднюю околоземную орбиту. Название GPS программа получила в том же 1973 году.
Система GPS на данный момент используется не только в военной области, но и в гражданских целях. Сфер применения GPS много:
- Мобильная связь;
- Тектоника плит – происходит слежение за колебаниями плит;
- Определение сейсмической активности;
- Спутниковое отслеживание транспорта – можно проводить мониторинг за положением, скоростью транспорта и контролировать их движение;
- Геодезия – определение точных границ земельных участков;
- Картография;
- Навигация;
- Игры, геотегинт и прочие развлекательные области.
Важнейшим недостатком системы можно считать невозможность получения сигнала при определенных условиях. Рабочие частоты GPS лежат в дециметровом диапазоне волн. Это приводит к тому, что уровень сигнала может снизиться из-за высокой облачности, плотной листвы деревьев. Радиоисточники, глушилки, а в редких случаях даже магнитные бури также могут мешать нормальной передаче сигнала. Точность определения данных будет ухудшаться в приполярных районах, так как спутники невысоко поднимаются над Землей.
Навигация без GPS
 Основным конкурентом GPS является российская система ГЛОНАСС (глобальная навигационная спутниковая система). Свою полноценную работу система начала с 2010 года, попытки активно использовать ее предпринимались с 1995 года. Существует несколько отличий между двумя системами:
Основным конкурентом GPS является российская система ГЛОНАСС (глобальная навигационная спутниковая система). Свою полноценную работу система начала с 2010 года, попытки активно использовать ее предпринимались с 1995 года. Существует несколько отличий между двумя системами:
- Разные кодировки – американцы используют CDMA, для российской системы используется FDMA;
- Разные габариты устройств – ГЛОНАСС использует более сложную модель, поэтому повышается энергопотребление и размеры устройств;
- Расстановка и движение спутников на орбите – российская система обеспечивает более широкий охват территории и более точное определение координат и времени.
- Срок службы спутников – американские спутники делаются более качественными, поэтому они служат дольше.
Помимо ГЛОНАСС и GPS существуют и другие менее популярные навигационные системы – европейский Galileo и китайский Beidou.
Описание GPS
Принцип работы GPS
Работает система GPS следующим образом – приемник сигнала измеряет задержку распространения сигнала от спутника до приемника. Из полученного сигнала приемник получает данные о местонахождении спутника. Для определения расстояния от спутника до приемника задержка сигнала умножается на скорость света.
 С точки зрения геометрии работу навигационной системы можно проиллюстрировать так: несколько сфер, в середине которых находятся спутники, пересекаются и в них находится пользователь. Радиус каждой из сфер соответственно равен расстоянию до этого видимого спутника. Сигналы от трех спутников позволяют получить данные о широте и долготе, четвертый спутник дает информацию о высоте объекта над поверхностью. Полученные значения можно свести в систему уравнений, из которых можно найти координату пользователя. Таким образом, для получения точного местоположения необходимо провести 4 измерения дальностей до спутника (если исключить неправдоподобные результаты, достаточно трех измерений).
С точки зрения геометрии работу навигационной системы можно проиллюстрировать так: несколько сфер, в середине которых находятся спутники, пересекаются и в них находится пользователь. Радиус каждой из сфер соответственно равен расстоянию до этого видимого спутника. Сигналы от трех спутников позволяют получить данные о широте и долготе, четвертый спутник дает информацию о высоте объекта над поверхностью. Полученные значения можно свести в систему уравнений, из которых можно найти координату пользователя. Таким образом, для получения точного местоположения необходимо провести 4 измерения дальностей до спутника (если исключить неправдоподобные результаты, достаточно трех измерений).

Поправки в полученные уравнения вносит расхождение между расчетным и фактическим положением спутника. Погрешность, которая возникает в результате этого, называется эфемеридной и составляет от 1 до 5 метров. Также свой вклад вносят интерференция, атмосферное давление, влажность, температура, влияние ионосферы и атмосферы. Суммарно совокупность всех ошибок может довести погрешность до 100 метров. Некоторые ошибки можно устранить математически.
Чтобы уменьшить все погрешности, используют дифференциальный режим GPS. В нем приемник получает по радиоканалу все необходимые поправки к координатам от базовой станции. Итоговая точность измерения достигает 1-5 метров. При дифференциальном режиме существует 2 метода корректировки полученных данных – это коррекция самих координат и коррекция навигационных параметров. Первый метод использовать неудобно, так как все пользователи должны работать по одним и тем же спутникам. Во втором случае значительно увеличивается сложность самой аппаратуры для определения местоположения.
Существует новый класс систем, который увеличивает точность измерения до 1 см. Огромное влияние на точность оказывает угол между направлениями на спутники. При большом угле местоположение будет определяться с большей точностью.
Точность измерения может быть искусственно снижена Министерством обороны США. Для этого на устройствах навигации устанавливается специальный режим S/A – ограниченный доступ. Режим разработан в военных целях, чтобы не дать противнику преимущества в определении точных координат. С мая 2000 года режим ограниченного доступа был отменен.
Все источники ошибок можно разделить на несколько групп:
- Погрешность в вычислении орбит;
- Ошибки, связанные с приемником;
- Ошибки, связанные с многократным отражением сигнала от препятствий;
- Ионосфера, тропосферные задержки сигнала;
- Геометрия расположения спутников.
Основные характеристики
В систему GPS входит 24 искусственных спутника Земли, сеть наземных станций слежения и навигационные приемники. Станции наблюдения требуются для определения и контроля параметров орбит, вычисления баллистических характеристик, регулировка отклонения от траекторий движения, контроль аппаратуры на бору космических аппаратов.
- Количество спутников – 26, 21 основной, 5 запасных;
- Количество орбитальных плоскостей – 6;
- Высота орбиты – 20000 км;
- Срок эксплуатации спутников – 7,5 лет;
- Рабочие частоты – L1=1575,42 МГц; L2=12275,6МГц, мощность 50 Вт и 8 Вт соответственно;
- Надежность навигационного определения – 95%.
Навигационные приемники бывают нескольких типов – портативные, стационарные и авиационные. Приемники также характеризуются рядом параметров:
- Количество каналов – в современных приемников используется от 12 до 20 каналов;
- Тип антенны;
- Наличие картографической поддержки;
- Тип дисплея;
- Дополнительные функции;
- Различные технические характеристики – материалы, прочность, защита от влаги, чувствительность, объем памяти и другие.
Принцип действия самого навигатора – в первую очередь устройство пытается связаться с навигационным спутником. Как только связь будет установлена, происходит передача альманаха, то есть информации об орбитах спутников, находящихся в рамках одной навигационной системы. Связи с одним только спутником недостаточно для получения точного местоположения, поэтому оставшиеся спутники передают навигатору свои эфемериды, необходимые для определения отклонений, коэффициентов возмущения и других параметров.
Холодный, теплый и горячий старт GPS навигатора
Включив навигатор впервые или после долгого перерыва, начинается долгое ожидание для получения данных. Долгое время ожидания связано с тем, что в памяти навигатора отсутствуют либо устарели альманах и эфемериды, поэтому устройство должно выполнить ряд действий по получению или обновлению данных. Время ожидания, или так называемое время холодного старта, зависит от различных показателей – качество приемника, состояние атмосферы, шумы, количество спутников в зоне видимости.
Чтобы начать свою работу, навигатор должен:
- Найти спутник и установить с ним связь;
- Получить альманах и сохранить его в памяти;
- Получить эфемериды от спутника и сохранить их;
- Найти еще три спутника и установить с ними связь, получить от них эфемериды;
- Вычислить координаты при помощи эфемерид и местоположения спутников.
Только пройдя весь этот цикл, устройство начнет работать. Такой запуск и называется холодным стартом.
Горячий старт значительно отличается от холодного. В памяти навигатора уже имеется актуальный на данный момент альманах и эфемериды. Данные для альманаха действительны в течение 30 дней, эфемерид – в течение 30 минут. Из этого следует, что устройство выключалось на непродолжительное время. При горячем старте алгоритм будет проще – устройство устанавливает связь со спутником, при необходимости обновляет эфемериды и вычисляет местоположение.
Существует теплый старт – в этом случае альманах является актуальным, а эфемериды нужно обновить. Времени на это затрачивается немного больше, чем на горячий старт, но значительно меньше, чем на холодный.
Ограничения на покупку и использование самодельных модулей GPS
Российское законодательство требует от производителей уменьшать точность определения приемников. Работать с незагрубленной точностью может производиться только при наличии у пользователя специализированной лицензии.
 Под запретом в Российской Федерации находятся специальные технические средства, предназначенные для негласного получения информации (СТС НПИ). К таковым относятся GPS трекеры, которые используются для негласного контроля над перемещением транспорта и прочих объектов. Основной признак незаконного технического средства – его скрытность. Поэтому перед приобретением устройства нужно внимательно изучить его характеристики, внешний вид, на наличие скрытых функций, а также просмотреть необходимые сертификаты соответствия.
Под запретом в Российской Федерации находятся специальные технические средства, предназначенные для негласного получения информации (СТС НПИ). К таковым относятся GPS трекеры, которые используются для негласного контроля над перемещением транспорта и прочих объектов. Основной признак незаконного технического средства – его скрытность. Поэтому перед приобретением устройства нужно внимательно изучить его характеристики, внешний вид, на наличие скрытых функций, а также просмотреть необходимые сертификаты соответствия.
Также важно, в каком виде продается устройство. В разобранном виде прибор может не относиться к СТС НПИ. Но при сборе готовое устройство уже может относиться к запрещенным.
описание и принцип работы :: SYL.ru
Вероятно, каждый прямо или косвенно пользовался GPS-приемниками. Они встречаются в большинстве смартфонов, многих новых автомобилях, применяются в коммерческих целях по всему миру. Эти крошечные устройства могут мгновенно и совершенно бесплатно определить точное местоположение и время почти в любой точке планеты. Все, что для этого нужно, – наличие самого GPS-приемника, а они с каждым днем становятся дешевле и меньше.
Однако не следует принимать эти небольшие и недорогие модули как должное. На то, чтобы всегда и везде иметь возможность точно определить местоположение, ушли десятилетия инженерных разработок. С конца 70-х запускались десятки GPS-спутников, каждый из которых оборудован прецизионными атомными часами, и они продолжают регулярно выводиться на околоземную орбиту. Они непрерывно посылают данные на Землю по выделенным радиочастотным каналам. Карманные GPS-приемники оборудованы крошечными антеннами и процессорами, которые непосредственно принимают сигнал, отправленный спутниками, и на лету вычисляют положение и время.
Как работает GPS?
Для определения положения и времени почти в любом месте Земли используется орбитальная группировка и наземные станции. На высоте более 19 тыс. км над Землей постоянно развернуто по меньшей мере 24 активных спутника. Их позиции рассчитаны таким образом, чтобы в небе над любой точкой планеты всегда находилась ровно половина из них. Основной целью спутников является передача информации на Землю на частотах в диапазоне 1,1–1,5 ГГц. С помощью этих данных и математических расчетов наземный приемник или модуль GPS могут вычислять свое местоположение и текущее время.
В 2010 г. была восстановлена альтернативная система глобального позиционирования ГЛОНАСС. Она также насчитывает 24 спутника и вещает на частотах 1,2–1,6 ГГц.

Каналы
Число каналов, с которыми работает GPS-модуль, влияет на время первого исправления (TTFF). Поскольку неизвестно, какие спутники находятся в поле зрения, чем больше частот можно проверить сразу, тем быстрее будет произведена коррекция. После установления связи или получения исправления некоторые модули отключают дополнительные каналы для экономии энергии. Если пользователь не против того, чтобы немного дольше подождать, 12 или 14 каналов достаточно для отличной работы приемника.
Трилатерация
Это математический метод, используемый для вычисления позиции с несколькими контрольными точками. Чтобы GPS-приемник мог вычислить точное положение и время, он должен установить связь по крайней мере с 4 спутниками. Для вычисления расстояния до объекта методом триангуляции нужны 2 точки. Но в случае GPS нужно определить 4 значения – широту, долготу, высоту и время.
Определение местоположения и времени
Данные, передаваемые на Землю с каждого спутника, содержат несколько разных фрагментов информации, которые позволяют GPS-приемнику точно рассчитать свое местоположение и время. Важным элементом оборудования на каждом из них являются чрезвычайно точные атомные часы. Данные о времени посылаются на Землю вместе с орбитальным положением и временем прибытия в разные точки орбиты. Другими словами, GPS-модуль получает временную метку от всех видимых спутников, а также информацию об их местонахождении. Из этих данных можно вычислить расстояние до каждого из них. Если антенна видит не менее 4 спутников, то можно точно рассчитать положение приемника.
Есть еще сторона глобальной системы позиционирования. Наряду с вышеперечисленными элементами существуют наземные станции, которые могут взаимодействовать со спутниковой сетью и некоторыми приемниками GPS. Такая система называется сегментом управления и повышает точность измерений. Ее примерами являются WAAS и DGPS. Первая используется большинством приемников и снижает ошибку до 5 м. Вторая требует наличия ресивера определенного типа и обеспечивает сантиметровую погрешность. Устройства данного типа дорогие и имеют тенденцию быть более крупными, поскольку требуют дополнительной антенны.

Точность геопозиционирования
Погрешность измерений приемника GPS или GLONASS зависит от ряда переменных, в первую очередь от отношения сигнал/шум, положения спутника, погодных условий и наличия препятствий, таких как здания и горы. Эти факторы могут создавать ошибки расчета местоположения пользователя. Шум обычно создает ошибку от 1 до 10 м. Горы, здания и другие предметы, которые могут препятствовать прохождению сигнала от спутника, могут вызывать в 3 раза большую ошибку. Для нормальной работы GPS-приемник должен иметь возможность принимать сигнал от 4 спутников. Связь с первым из них позволяет получить данные об альманахе и, следовательно, доступности остальных. Хотя и можно определить местонахождение и с меньшим, чем 4, числом спутников, погрешность измерений может быть довольно большой. Самое точное определение местоположения происходит, когда есть открытый обзор ясного неба, свободный от любых препятствий, c более чем 4 спутниками над головой. Для борьбы с этими ошибками создано несколько вспомогательных средств.
Assisted GPS
Одной из таких вспомогательных систем является Assisted GPS или AGPS. Этот метод использует беспроводные (наземные) сети для ретрансляции сигнала спутника, когда он слаб или его невозможно принять. AGPS помогает в двух вещах. Во-первых, предоставляет получателю данные альманаха и точное время. И во-вторых, использует более высокую вычислительную мощность и хороший спутниковый сигнал наземной базы для интерпретации получаемой фрагментированной информации, чтобы обеспечить более достоверное определение местоположения. AGPS в основном осуществляется внешними GPS-приемниками, установленными на вышках сотовой связи. Связь с ними позволяет быстрее настроиться на спутник, а также получить более точную информацию. Этот метод используется в GPS-приемниках для «Андроида» в мобильных телефонах. Вот почему смартфоны часто бывают точнее специализированных продуктов. AGPS присутствует в камерах, геодезических GPS-приемниках и некоторых автомобилях. Его использование наиболее выгодно в городах, где сигнал в лабиринте зданий иногда довольно трудно принять.
Дифференциальный GPS
Другим методом является дифференциальная система геопозиционирования DGPS. Данная система определения местоположения также использует наземные станции. Однако она отличается тем, что находит разницу между показаниями спутника и приемника. Станции могут находиться на расстоянии до 370 км от ресивера, и важно отметить, что по мере удаления от них точность измерений ухудшается. DGPS осуществляется наземной станцией, передающей сигнал, который диктует ошибку между фактической и измеренной псевдодальностью. Это значение рассчитывается путем умножения скорости света на время прохождения сигнала со спутника на приемник.
Примером одного из видов DGPS является система широкого радиуса действия WAAS. Первоначально она была разработана для помощи авиационным GPS-приемникам. В WAAS используется система специально построенных наземных станций. Предусмотрен набор стандартов точности, которым измерения должны отвечать. В горизонтальном и вертикальном направлениях в 95% случаев их погрешность не должна превышать 7,6 м. Наземные станции отправляют свои измерения на головные станции, которые посылают исправления на спутники WAAS каждые 5 секунд или чаще. Со спутника сигнал транслируется обратно на приемники на Земле, где скорректированные данные используются для повышения точности GPS. В некоторых местах WAAS может обеспечить погрешность до 1 м по горизонтали и 1,5 м по вертикали. Хотя WAAS присутствует только в Северной Америке, подобные системы существуют во многих других частях мира.

Форматы сообщений
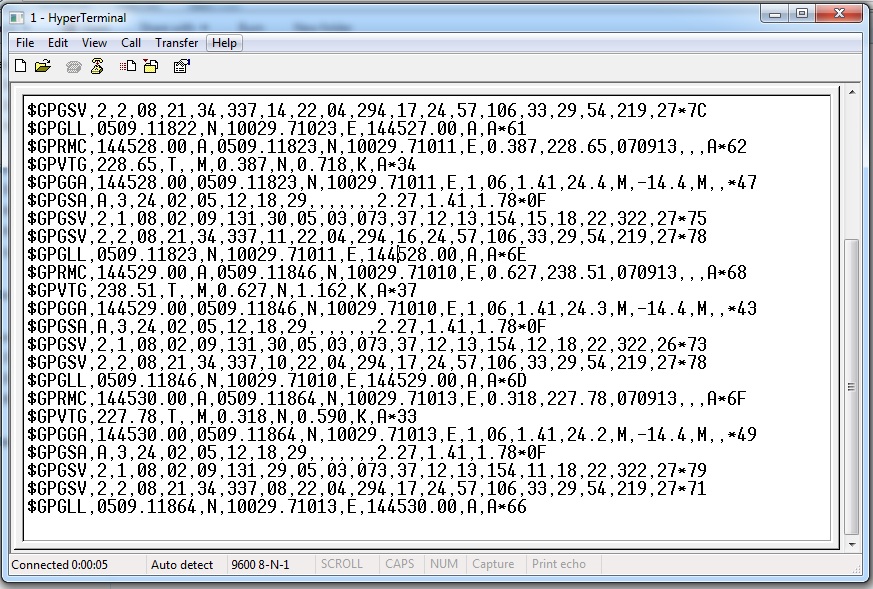
Данные GPS отображаются в разных форматах через последовательный интерфейс. Существуют стандартные и нестандартные (проприетарные) форматы сообщений. Почти все GPS-приемники выводят данные NMEA. Это стандарт форматирования информации в виде строк, называемых предложениями. Каждое из них содержит различные данные, разделенные запятыми. Всего насчитывается 19 видов таких предложений. Вот пример NMEA-строки, полученной от приемника, установившего связь со спутником:
$GPGGA,235317.000,4003.9039,N,10512.5793,W,1,08,1.6,1577.9,M,-20.7,М,,0000*5F.
В предложении содержится следующая информация:
- время по Гринвичу: 23:53:17;
- широта: северная, 40,039039°;
- долгота: западная, 10,5125793°;
- количество спутников: 08;
- высота: 1577 м.
Данные разделяются запятыми, чтобы упростить чтение и анализ компьютерами и микроконтроллерами. Они отправляются на последовательный порт с интервалом, называемым скоростью обновления. Большинство ресиверов обновляют эту информацию один раз в секунду (т. е. с частотой 1 Гц), но лучшие GPS-приемники способны выполнять несколько обновлений в секунду. Для современных моделей это значение равно 5–20 Гц.
Чтение данных
Большинство модулей GPS оборудованы последовательным портом, который позволяет подключить их к микроконтроллеру или компьютеру.
После включения устройства данные NMEA (или сообщения в другом формате) отправляются из последовательного передающего разъема (TX) с определенной скоростью передачи и скоростью обновления, даже при отсутствии приема со спутника. Чтобы микроконтроллер считывал информацию, необходимо подключить вывод TX GPS ко входу RX. Чтобы настроить модуль, нужно подключить его вход RX к выходу TX устройства управления.
Микроконтроллер обычно анализирует данные NMEA. Разбор предложения производится путем простого выделения из него части информации.
Например, микроконтроллеру требуется прочитать только высоту GPS. Вместо того чтобы иметь дело со всем текстом, он анализирует предложение GPGGA и выбирает только высоту. Как только необходимая информация будет отобрана, ею можно манипулировать, чтобы выполнять другие действия.
Платформа Arduino также может легко анализировать данные NMEA с помощью библиотеки Tiny GPS.

Подключение к компьютеру
Простым способом непосредственного просмотра данных NMEA является использование GPS-приемника для ноутбука или компьютера. Для создания соединения необходимо лишь запитать устройство геопозиционирования и подключить вывод TX внешнего модуля ко входу RX компьютера.
Также возможно подключение GPS-приемника к USB-порту. При этом он может питаться как от собственного источника, так и через соединение с ПК. В первом случае освободившаяся линия используется для обнаружения наличия подключения USB-GPS-приемника к хосту. При соединении с компьютером питание поступает через универсальную последовательную шину, поэтому дополнительного источника не требуется.
Кроме того, Bluetooth-GPS-приемник обеспечивает беспроводную связь как с ПК, так и с совместимыми устройствами того же производителя. Это позволяет производить быстрый обмен общими данными, такими как маршруты и путевые точки.
После подключения необходимо открыть программу последовательного терминала, установив скорость передачи, равной скорости GPS-модуля. Даже если приемник не установил связь со спутником, на экране появится поток NMEA-предложений.

Настройка ресивера
Для настройки приемника GPS и ГЛОНАСС важно знать тип чипсета, который в нем установлен. Набор микросхем содержит мощный процессор, который отвечает за пользовательский интерфейс, все вычисления, а также аналоговые схемы антенны. Кроме того, чипсет позволяет принимать данные для настройки таких параметров, как скорость обновления, скорость передачи, выбор предложения и т. д.
Чтобы отправлять команды на приемник через последовательный порт, понадобится набор команд или справочное руководство. Но перед тем как погружаться в изучение команд для конкретного модуля, необходимо проверить наличие программного обеспечения, которое значительно облегчает работу с устройством и его настройку.
Некоторые чипсеты позволяют использовать альтернативные протоколы, такие как бинарный SiRF, UBX или собственные сообщения. Эти протоколы содержат аналогичную информацию, но обмениваются данными в виде двоичного (вместо ASCII) кода для более быстрой связи.
При коммуникации с GPS-приемником команды должны завершаться контрольной суммой. В большинстве случаев для этого для каждого предложения нужно выполнить команду XOR.
Антенна
Маленький GPS-модуль получает сигналы от спутников, удаленных на расстояние 19 тыс. км, которые расположены не только над головой, но и в любом месте на небе. Для лучшей производительности между антенной и спутниками нужна прямая видимость. Погода, облака, снежные бури не должны влиять на сигнал, но деревья, здания, горы, крыша над головой будут создавать нежелательные помехи, и точность GPS от этого пострадает.
Разработано много вариантов антенн. Одним из самых распространенных является керамическая патч-антенна. Она отличается низким профилем, дешевизной и компактностью, но, по сравнению с другими типами, принимает хуже. Чтобы получить хороший сигнал, она должна быть направлена вверх на открытое небо, т. е. когда усиление максимальное.
В некоторых GPS-модулях используются винтовые антенны. Они занимают больше места, но их форма позволяет получить лучший сигнал в любой ориентации за счет более низкого усиления.
В некоторых модулях применяются SMA-антенны. Это дает возможность монтировать их в местах, отличных от места расположения самого приемника, что пригодится в случаях, когда основная система не имеет доступа к открытому небу (например, в здании или автомобиле).
Как правильно разместить GPS антенну внутри автомобиля. Часть 1
Под лобовым стеклом, в центре?
Между передними сидениями?
Или подвесить как-нибудь сбоку?
Ответ можно получить с помощью эксперимента. В конечном счете, мы так и поступим, поэтому, если Вы торопитесь, то можете сразу переходить к концу статьи, непосредственно к ответу. Мы же, чтобы понимать физику процесса, предварительно рассмотрим некоторые, относящиеся к делу, теоретические вопросы.
Сначала несколько общих слов о принципе работы спутникового навигационного приемника. Радиосигналы, передаваемые каждым навигационным спутником, принимаются, усиливаются, переводятся на промежуточную частоту и подвергаются дальнейшей обработке. Эта обработка заключается в извлечении информационного сообщения спутника и определении времени распространения сигнала от спутника до приемника. Информационное сообщение спутника содержит эфемериды его орбиты, которые используются для определения его координат на момент передачи сигнала. Задержка принятого сигнала используется для определения расстояния до спутника. Зная координаты нескольких спутников и расстояния до них, навигационный приемник вычисляет координаты потребителя.
До скольких спутников требуется знать расстояния? Положение потребителя в пространстве определяется тремя независимыми величинами (например, долготой, широтой и высотой над уровнем моря). Кроме того, поскольку величина измеряемой задержки сигнала напрямую связана с уходом часов приемника, величина этого ухода также подлежит определению. Таким образом, в процессе решения навигационной задачи требуется определить четыре независимых неизвестных величины: долгота, широта, высота над уровнем моря и уход часов приемника.
Для определения этих неизвестных требуется минимум четыре уравнения. При этом, уравнения должны быть независимы, т.е. ограничения, накладываемые любым из них не должны дублировать ограничения остальных трех. Фактически, независимость уравнений определяется взаимным расположением выбранных спутников. Проиллюстрируем сказанное двумерным случаем, в котором для простоты рассуждений часы приемника полагаются абсолютно точными, в силу чего для решения навигационной задачи достаточно двух спутников (положение на плоскости определяется двумя независимыми координатами).
Рис 1. Влияние взаимного расположения спутников на точность определения координат
На рис. 1 конечная ширина концентрических колец обозначает конечную точность определения расстояний до спутников. В результате измерения параметров сигнала одного спутника GPS приемник выясняет, что размер заштрихованной области пересечения колец соответствует точности определения координат потребителя. Точность в случае рис. 1а выше точности в случае рис. 1б, что связано с различием угловых расстояний между направлениями на спутники. При уменьшении этого углового расстояния ограничения, накладываемые уравнениями, становятся более похожими друг на друга, то-есть становятся более зависимыми, а точность определения координат падает. В пределе, при совпадении угловых положений спутников, потребитель не может быть локализован.
В действительности, для увеличения точности, GPS приемник стремится использовать как можно больше спутников (рис 2). Большее число колец дает меньшую площадь их области пересечения, что соответствует увеличению точности. В трехмерном случае все эти рассуждения остаются справедливыми, только концентрические круги на плоскости необходимо заменить сферами с конечной толщиной поверхности.
Рис 2.
Для некоторого числа спутников можно определить такое их расположение, при котором будет обеспечена максимальная точность (оптимальное созвездие). Например, для 4 спутников это созвездие будет таким: один спутник в зените, остальные три располагаются в плоскости горизонта, отстоя друг от друга на одинаковый азимутальный угол. Если спутников больше 4-х, оптимальная конфигурация спутников будет похожей. Можно показать, что для нее объем многоугольника, вершины которого совпадают с концами единичных векторов, направленных от наблюдателя к спутникам, максимален. Отсюда интуитивно понятно требование распределить часть спутников оптимального созвездия равномерно по горизонту. Качество созвездия с точки зрения точности определения координат принято характеризовать коэффициентом PDOP (Position Dilution Of Precision), который равен отношению ошибки измерения координат к ошибке определения дальности. Чем меньше этот коэффициент, тем точнее определяются координаты. Для созвездия на рис. 1а PDOP меньше, чем для созвездия на рис. 1б. Для оптимального созвездия PDOP достигает минимального значения.
В случае системы мониторинга транспорта высота объекта над уровнем моря, как правило, менее значима, чем его положение в плане. Тут вместо PDOP можно воспользоваться HDOP (Horizontal Dilution Of Precision) – отношение ошибки определения координат в плане к ошибке определения дальности до спутника. Оптимальное созвездие с точки зрения HDOP отличается от оптимального с точки зрения PDOP. В частности, для минимизации HDOP спутник в зените ни к чему – минимум HDOP достигается при равномерном по азимуту распределении спутников в плоскости горизонта.
Теперь пора вернуться к обсуждаемому вопросу: как расположение антенны внутри автомобиля влияет на точность определения его координат? Во-первых, созвездие «видимых спутников» для антенны внутри автомобиля может отличаться от созвездия фактически имеющихся: кузов автомобиля может влиять на принципиальную возможность приема сигнала. Во-вторых, точность измерений параметров сигнала, а следовательно, и дальностей до спутников, внутри автомобиля может ухудшаться. Рассмотрим сначала первую часть вопроса:
Ухудшение точности определения координат, связанное с уменьшением количества видимых спутников.
Допустим, антенна внутри автомобиля «видит» только некоторые из оптимального с точки зрения HDOP созвездия, состоящего из 8 спутников. Как при этом изменится точность определения координат в плане, если точность определения дальности до «видимых» спутников остается неизменной? Чтобы ответить на этот вопрос нам придется записать пару формул. Если Вы и их и так знаете, или Вам вообще все равно, можете просто прочитать ответ ниже. Мы же для начала введем в рассмотрение декартову систему координат с центром в точке расположения антенны, ось Z которой направлена вверх, ось Y – на север, а ось X, соответственно, на восток. Поскольку в оптимальном, с точки зрения HDOP, созвездии спутники расположены в плоскости горизонта их координаты Z в выбранной системе будут равны 0. Для исходного оптимального созвездия можно записать следующую систему уравнений, связывающую измеренную дальность с ошибками определения координат и уходом часов GPS приемника:
| здесь | — действительное расстояние от спутника до точки расположения антенны, |
| — ошибка определения дальности до спутника, | |
| — координаты спутника, | |
| — ошибки определения координат и ошибка часов GPS приемника. |
В уравнениях отсутствует ошибка определения координат по оси Z. Предполагается, что эта координата нам достоверно известна, и равна 0 в выбранной системе координат.
Правую часть каждого из уравнений (1) можно разложить в ряд по степеням и . Поскольку ошибки определения координат много меньше любого из расстояний до спутников, в разложениях можно оставить только члены, связанные с первыми степенями. В результате получим:
| (2) |
Поскольку , а , где — азимутальный угол в сферической системе координат, соответствующей исходной декартовой, в (2) можно избавиться от координат спутников, заменив их соответсвующими азимутальными углами:
| (3) |
или в матричном виде:
Полученная система уравнений устанавливает связь между ошибками измерения дальностей до спутников и определения координат в плане. Ее решение, минимизирующее сумму квадратов невязок, выглядит так:
| (5) |
где — транспонированная матрица H.
Выражение (5) устанавливает связь между конкретными реализациями ошибок. Однако, ошибки измерения дальностей до спутников суть случайные величины, поэтому, оперировать надо не их конкретными реализациями, а статистическими характеристиками. В некотором приближении, приемлемом в данном контексте, можно считать, что результаты измерений подчинены нормальному закону, независимы друг от друга и имеют одинаковую дисперсию. То-есть в целом их можно охарактеризовать диагональной ковариационной матрицей с одинаковыми элементами на диагонали:
| (6) |
где — дисперсия измерения дальности
Тогда неизвестный вектор ошибок определения координат и ухода часов тоже будет случайным и подчиненным нормальному закону. Его ковариационная матрица определится законом распространения ошибок:
| (7) |
Поскольку в оптимальном по HDOP созвездии спутники равномерно распределены по азимуту, а из интуитивных соображений ясно, что при повороте всей системы спутников на некоторый угол вокруг оси Z ничего не изменится, матрица H однозначно определена. Это означает, что матричный сомножитель в (6) может быть вычислен. Выполнив эти вычисления, получим:
| (8) |
То-есть дисперсия ошибки определения координат по каждой из осей в оптимальном по HDOP созвездии из 8-ми спутников в четыре раза меньше дисперсии ошибки измерения дальности.
Как изменится ковариационная матрица , если сигнал одного из спутников будет потерян? Это несложно выяснить, достаточно в системе уравнений (3) убрать одно уравнение и повторить только что выполненные вычисления:
| (9) |
Ковариационная матрица уже не диагональная, ошибки по осям X и Y кореллированы, поэтому, чтобы определить дисперсию ошибки диагональных элементов матрицы недостаточно, необходимо найти собственные числа ковариационной матрицы. Выполнив это получим значение максимальной дисперсии ошибки
Аналогично, вычислим ковариационные матрицы для случая исчезновения сигнала 2-х, 3-х и 4-х соседних спутников, и сведем все результаты в одну таблицу:
Характерной является 2-я снизу строка таблицы: при исчезновении сигнала от половины соседних спутников дисперсия ошибки увеличивается в 20 раз, то-есть среднеквадратичная ошибка возрастает в 4.5 раза (корень из 20).
Если среднеквадратичная ошибка измерения дальности до спутника 8 метров (что недалеко от истины), то в для оптимального созвездия среднеквадратичная ошибка измерения координат составит 4 метра, а при исчезновении 4-х соседних спутников увеличится до 17.9 метров.
Такое ухудшение точности хоть и не критично с точки зрения типичных задач мониторинга транспорта, но, тем не менее, может расстроить пользователя системы «Навигатор+».
Можно ли как-нибудь определить, как будут меняться созвездия видимых спутников для представленных в начале статьи способов расположения антенны? Простые геометрические построения в данном случае не помогут. Дело в том, что если размеры объекта, препятствующего приему сигнала, соизмеримы с длиной волны, то интенсивность сигнала вблизи границы области геометрической тени будет определяться дифракцией электромагнитных волн на объекте. Проще говоря, куском железа размером в пару длин волн сложно «загородиться» от спутника. Более того, даже если размеры экранирующего объекта много больше длины волны, но расстояние от границы объекта до точки наблюдения соизмеримо с длиной волны, дифракционными эффектами также нельзя пренебречь. Длина волны, соответствующая несущей частоте GPS сигнала, равна приблизительно 190 мм. Размер если и не близкий к размерам характерным конструктивных эелементов кузова автомобиля, то по крайней мере соизмеримый с ними. Поэтому, для GPS антенны, расположенной в салоне эффекты дифракции на элементах конструкции могут быть существенны.
На практике это может означать, как то, что, например, антенна, спрятанная под крышей автомобиля, может, тем не менее, обеспечивать прием GPS сигнала, так и то, что сигнал от спутника, находящегося в геометрической видимости может быть не принят.
Для определения условий видимости спутников можно было бы попытаться составить электродинамическую модель автомобиля и решить задачу дифракции, однако, это довольно сложно. Упрощенная модель, не учитывающая подробности элементов кузова, может не обеспечить адекватной точности, а составление строгой модели сопряжено со значительными математическими и вычислительными трудностямии. Поэтому, мы поступили проще: провели эксперимент. Антенну одного GPS приемника резместили на крыше неподвижного автомобиля, а антенну другого поочередно размещали в салоне тремя указанными выше способами, и сравнивали два видимых созвездия друг с другом.
Для демонстрации видимых созвездий использовалась диаграмма, получающаяся отображением координат спутников на плоскую область, ограниченную кругом, при котором азимут спутника равен полярному углу соответствующей ему точки, отсчитываему по часовой стрелке от вертикальной оси, а косинус угла возвышения пропорционален расстоянию от точки до центра круга. Если, находясь в точке расположения антенны, повернуться лицом на север, а потом каким-нибудь непостижимым образом моментально взлететь строго вертикально на пару сотен тысяч километров, и посмотреть оттуда на навигационные спутники, то они будут расположены так же, как на диаграмме. Например, спутнику, расположенному в зените, будет соответствует точка в центре круга, а спутнику, только появляющемуся из-за горизонта, соответствует точка вверху диаграммы. GPS спутники принято идентифицировать числами, поэтому они обозначаются кружками с номером спутника внутри. Окружности сетки диаграммы соответствуют углам возвышения 0, 15, 30, 45, 60 и 75 градусов.
Вот результаты эксперимента:
| Антенна на крыше автомобиля | Антенна под лобовым стеклом в центре (1) |
| Антенна на крыше автомобиля | Антенна между передними сидениями (2) |
| Антенна на крыше автомобиля | Развернутая на 90 градусов антенна (3) |
В целом, как ни странно, кузов автомобиля не очень сильно влияет на количество видимых спутников. Антенна под лобовым стеклом видит те же спутники, что и антенна на крыше, антенна между сидениями «потеряла» всего лишь два спутника (6 и 18), и то же самое сделала антенна, перевернутая на 90 градусов: тоже потеряла пару спутников, на этот раз 6 и 10. Вспоминая полученные выше результаты можно заключить, что геометрический фактор изменится не сильно.
Таким образом, мы рассмотрели первую часть поставленного вопроса о размещении антенны внутри автомобиля, связанную с изменением количества видимых спутников. Вторую часть вопроса рассмотрим во второй части статьи.