


Принцип работы асинхронного электродвигателя | Русэлт
Асинхронные электродвигатели – это устройства, главным назначением которых является преобразование энергии переменного электротока в механическую. Своим названием двигатель обязан асинхронному типу вращения ротора относительно частоты вращения магнитного поля, индуцирующего электроток в обмотке статора.
Принцип работы на примере асинхронного электродвигателя трехфазного тока
Этот тип электрического двигателя наиболее часто применяется в различных сферах промышленности. Двигатель имеет 3-и обмотки на статоре, со смещением на 120 градусов. Обмотки запитаны переменным током и объединены по схеме «звезда» или «треугольник». При подаче напряжения на обмотку статора во всех трёх фазах появится магнитный поток.
Вместе с изменением частоты напряжения на обмотке статора, изменяется и магнитный поток. Фазы и магнитные потоки смещены относительно друг друга на сто двадцать градусов. Суммарный магнитный поток и будет вращающимся магнитным потоком, создающим электродвижущую силу (ЭДС).
Преимущества и недостатки асинхронных электродвигателей
Простота эксплуатации и хорошая ремонтопригодность – главные достоинства асинхронного двигателя, сделавшие его наиболее востребованным в очень разных сферах машиностроения и приборостроения. Привлекает и:
- Сравнительно невысокая цена;
- Надёжность
- Несложность подсоединения в общую электроцепь устройств.
Асинхронные электродвигатели имеют и ряд недостатков:
- Трудности с точным регулированием скорости;
- Большой пусковой ток;
- Относительно невысокий коэффициент мощности.
По типу обмотки ротора, короткозамкнутой или фазной, асинхронные двигатели, подразделяются на 2 типа:
- Электродвигатели с короткозамкнутым ротором имеют обмотку, замыкающуюся на сам ротор;
- Электродвигатели с фазным ротором – обмотку с концами, выведенными на щеточно-коллекторный узел.


Преимущество двигателя с фазным ротором в том, что скорость вращения можно регулировать путем подключения дополнительных сопротивлений (реостатного регулирования).
Устройство и принцип работы трехфазных асинхронных двигателей | RuAut
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой».
Обмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки.
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
В асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором.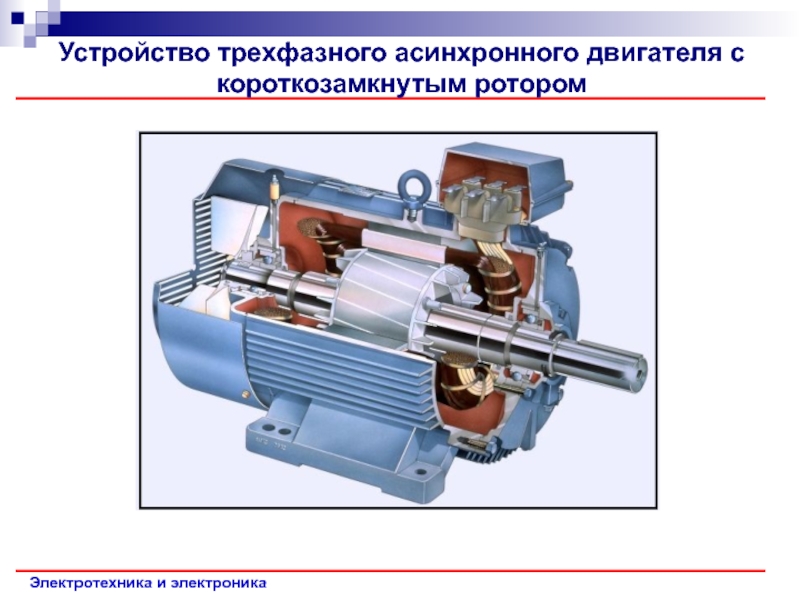 Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Параллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
При торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
 youtube.com/embed/SXug52xyZwg» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/SXug52xyZwg» frameborder=»0″ allowfullscreen=»»/>Преимущества и недостатки асинхронного двигателя
Преимущества асинхронного двигателя
Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать.
Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Недостатки асинхронных двигателей
Скорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора.
Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты.
Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты.
Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором.
Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения.
Вывод
Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска.
Другие полезные материалы:
Способы защиты электродвигателей
Когда не нужен плавный пуск
Когда нецелесообразно ремонтировать двигатель
Устройство асинхронный двигатель
5.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам. Конструкция короткозамкнутого ротора приведена на рис.5.3.
Конструкция короткозамкнутого ротора приведена на рис.5.3.
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
Принцип образования вращающегося магнитного поля рассмотрим на примере простейшей трехфазной двухполюсной обмотки, каждая фаза которой состоит из одной секции, фазы обмотки соединены звездой (рис.5.5). При этом секции тока в фазных обмотках (по времени) относительно друг друга на электрический угол 120° (рис.5.5, б). Проведем ряд построений вектора МДС трехфазной обмотки Fm, соответствующих различным моментам времениt0, t1, t2,t3отмеченным на графике рис.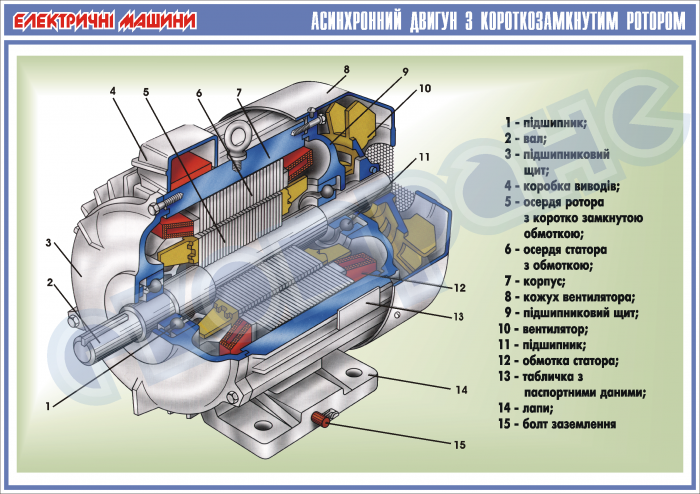 5.5, б.
5.5, б.
В момент времени t0ток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление.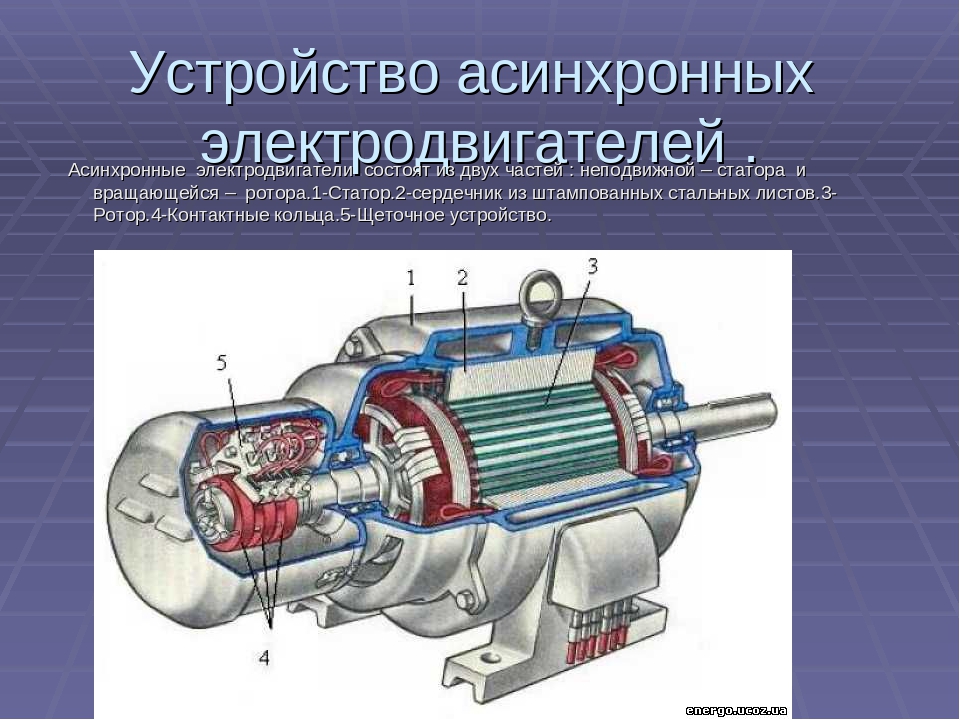 Сделав построения, аналогичные моменту времени t0, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени t0повернулся на 120° в направлении движения часовой стрелки.
Сделав построения, аналогичные моменту времени t0, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени t0повернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с t0до t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойn0которая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
,
Зависимость n0 от р и f представлена в табл.5.2.
Таблица 5.2
f = 50 Гц | Р | 1 | 2 | 3 | 4 | 5 | 6 |
n0, об/мин | 3000 | 1500 | 1000 | 750 | 600 | 500 | |
р=1 | f. | 50 | 100 | 200 | 400 | 500 | 1000 |
 ГЦ
ГЦКруговое вращающееся магнитное поле характеризуется тем, что пространственный вектор магнитной индукции этого поля Во вращается равномерно (n0= const).
При необходимости изменить направление вращения магнитного поля статора нужно поменять порядок следования токов в фазных обмотках статора, для чего переключают фазы на зажимах двигателя (рис.5.6).
Рис.5.6. Изменение направления вращения магнитного поля.
Асинхронный двигатель
Содержание:
Среди устройств, преобразующих электрическую энергию в механическую, несомненным лидером является трехфазный асинхронный двигатель – простой и надежный в эксплуатации агрегат. Благодаря своим качествам, он получил широкое применение в промышленности и других областях, где используются механизмы. Название двигателя связано с основным принципом его работы. У этих устройств магнитное поле статора вращается с частотой, превышающей частоту вращения ротора.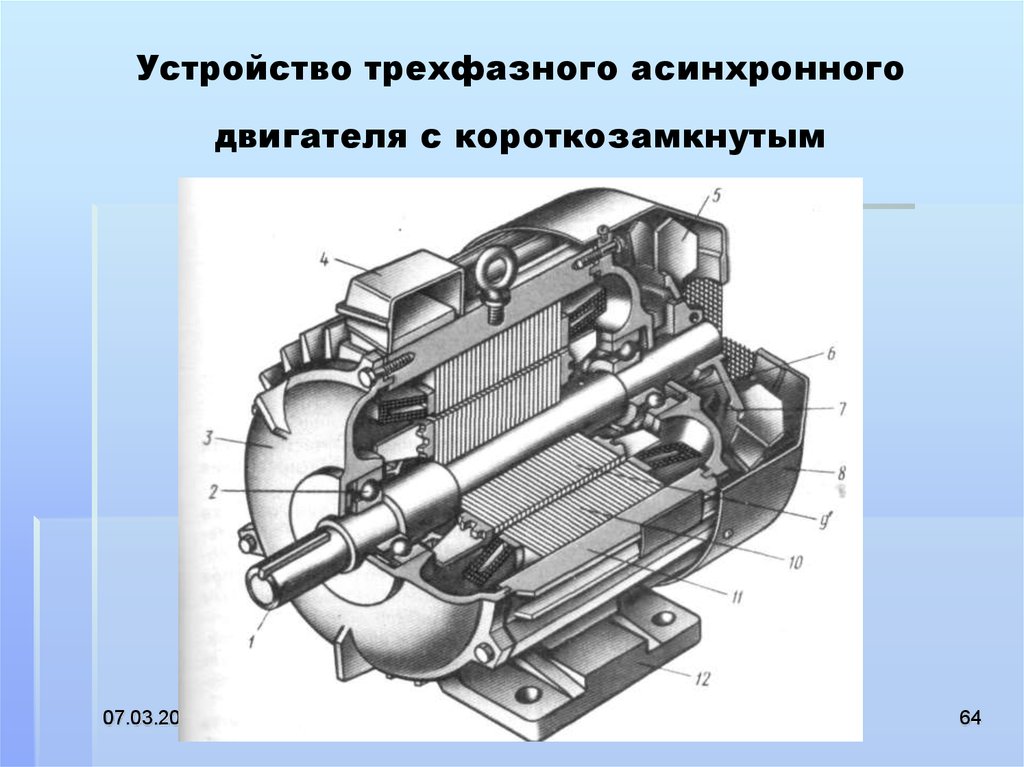 Работа агрегата осуществляется от сети переменного тока.
Работа агрегата осуществляется от сети переменного тока.
Где применяются
Асинхронные двигатели активно используются во многих отраслях промышленности и сельского хозяйства. Они потребляют примерно 70% всей энергии, предназначенной для преобразования электричества во вращательное или поступательное движение. Асинхронные двигатели зарекомендовали себя наиболее эффективными в качестве электрической тяги, без которой не обходятся многие технологические операции.
Асинхронные двигатели обладают множеством положительных качеств. Простая конструкция позволяет изготавливать наиболее дешевые и надежные устройства. Минимальные расходы по эксплуатации обеспечиваются отсутствием скользящего узла токосъема, что одновременно повышает и надежность агрегата.
Данный тип электродвигателей может быть трехфазным или однофазным, в зависимости от количества питающих фаз. В случае необходимости и при соблюдении определенных условий, трехфазный агрегат может питаться и работать от однофазной сети. Эти устройства применяются не только в промышленности, но и в бытовых условиях, а также на садовых участках или домашних мастерских. Однофазные двигатели обеспечивают работу и вращение вентиляторов, стиральных машин, небольших станков, водяных насосов и электроинструмента.
Эти устройства применяются не только в промышленности, но и в бытовых условиях, а также на садовых участках или домашних мастерских. Однофазные двигатели обеспечивают работу и вращение вентиляторов, стиральных машин, небольших станков, водяных насосов и электроинструмента.
Для нормального действия асинхронного агрегата необходимо выбирать наиболее рациональную схему управления. Трехфазный двигатель будет работать в однофазном режиме при условии правильного расчета конденсаторов, выбора типа и сечения проводов, аппаратуры защиты и управления.
Устройство асинхронного двигателя
Понятие асинхронный означает не совпадающий по времени, неодновременный. В связи с этим, ротор такого двигателя вращается с частотой, меньшей чем частота вращения электромагнитного поля статора.
Подобное отставание называется скольжением и обозначается символом S в формуле, применяемой для расчетов:
- S = (n1 – n2)/n1 – 100%, где n1 является синхронной частотой магнитного поля статора, а n2 – частотой вращения вала.

Конструктивно, стандартный асинхронный электродвигатель включает в себя следующие элементы и детали:
- Статор с обмотками. Эту функцию также может выполнять станина, внутри которой помещается статор с обмотками.
- Короткозамкнутый ротор. Если используется фазный – он может называться якорем или коллектором.
- Подшипники различного типа – качения или скольжения. На двигателях повышенной мощности в передней части установлены крышки для подшипников с уплотнениями.
- Металлический или пластмассовый охлаждающий вентилятор, помещенный в кожух с прорезями для подачи воздуха.
- Подключение кабелей осуществляется с помощью клеммной коробки.
Данные конструктивные элементы могут незначительно изменяться, в зависимости от модификации электродвигателя.
Как уже отмечалось, асинхронные двигатели бывают трехфазными или однофазными. Первый вариант, в свою очередь, выпускается с короткозамкнутым или фазным ротором. Наибольшее распространение получили трехфазные асинхронные электродвигатели с короткозамкнутым ротором, поэтому их следует рассмотреть более подробно.
Статор обладает круглой формой и собирается из специальных стальных листов, изолированных между собой. В результате, конструктивно образуется сердечник с пазами, в которые укладываются обмотки. Для этих целей используется обмоточный медный провод, изолированный лаком. В мощных агрегатах обмотки делаются в виде шины. При укладке они сдвигаются между собой на 120 градусов. Соединение осуществляется по схеме звезды или треугольника.
Конструкция самого короткозамкнутого ротора изготавливается в виде вала с надетыми на него стальными листами. Этот набор листов образует сердечник с пазами, заливаемые расплавленным алюминием. Равномерно растекаясь по пазам, алюминий образует стержни, края которых замыкают алюминиевые кольца.
Фазный ротор состоит из вала с сердечником и трех обмоток. С одного конца они соединяются звездой, а с другого – соединяются с токосъемными кольцами, на которые с помощью щеток подается электрический ток. Во время запуска образуется большой пусковой ток асинхронного двигателя. Его можно уменьшить путем добавления к фазным обмоткам нагрузочного реостата.
Его можно уменьшить путем добавления к фазным обмоткам нагрузочного реостата.
Принцип работы
Устройство и конструктивные особенности асинхронного двигателя определяют и принцип действия данного агрегата. Когда на обмотку статора подается напряжение, в ней образуется магнитное поле. Такая подача напряжения приводит к изменениям магнитного потока и всего магнитного поля статора. Измененные магнитные потоки поступают к ротору, приводят его в действие, после чего он начинает вращаться. Для того чтобы статор и ротор работали асинхронно, требуется, чтобы значения напряжения и магнитного потока были равны переменному току, используемому в качестве источника питания.
Сам двигатель работает следующим образом:
- Вращающееся магнитное поле воздействует на короткозамкнутую обмотку, специально приспособленную для вращения.
- Поле пересекает проводники роторной обмотки, индуктируя в них электродвижущую силу.
- Под воздействием силы в проводниках ротора начнется течение электрического тока, взаимодействующего с вращающимся магнитным полем. Это приводит к появлению электромагнитных сил, воздействующих на обмотку ротора.
- В сумме, действия приложенных сил вызывают появление вращающего момента, приводящего во вращение ротор в направлении магнитного поля.
 Это приводит к появлению электромагнитных сил, воздействующих на обмотку ротора.
Это приводит к появлению электромагнитных сил, воздействующих на обмотку ротора.Величина индуктированной ЭДС зависит от частоты пересечения проводников вращающимся магнитным полем. То есть, чем выше разница между n1 и n2, тем больше будет величина ЭДС. Ротор будет вращаться с частотой n2, которая всегда будет отставать от синхронной частоты поля статора n1. Эта разница между обеими частотами и будет частотой скольжения ∆n= n1- n2. Данное неравенство является необходимым условием появления электромагнитного вращающегося момента в асинхронном двигателе. Поэтому агрегат так и называется, поскольку вращение ротора происходит несинхронно с полем статора.
Что такое скольжение
Понятие скольжения представляет собой отношение частоты вращения к частоте поля. Данная величина S берется в процентном отношении от частоты вращения магнитного поля. В соответствии с формулой, рассмотренной ранее, частота вращения ротора, определяемая с помощью скольжения составит: n2 = n1 x (1 – S).
В соответствии с формулой, рассмотренной ранее, частота вращения ротора, определяемая с помощью скольжения составит: n2 = n1 x (1 – S).
Ротор асинхронного двигателя вращается в том же направлении, что и его магнитное поле. В свою очередь, направление вращения поля зависит от последовательности фаз трехфазной сети. Изменить направление вращения ротора возможно за счет изменения направления вращения поля, создаваемого статором. В этом случае изменяется порядок поступления импульсов тока к отдельным обмоткам. В случае необходимости может быть задано вращение по часовой или против часовой стрелки.
Важным моментом считается пуск асинхронного двигателя, при котором происходит пересечение обмотки ротора вращающимся магнитным полем. В результате, индуктируется большая ЭДС, создающая высокий пусковой ток. Подобное состояние компенсируется специальной нагрузкой, снижающей скорость вращения ротора.
Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!
Устройство и принцип работы асинхронного двигателя
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа. В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.
Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
Недостатки:
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.
- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.
Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.
Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
Принцип действия асинхронного двигателя — Asutpp
Электродвигатель предназначен для преобразования, с малыми потерями, электрическую энергию в механическую.
Предлагаем рассмотреть принцип действия асинхронного электродвигателя с короткозамкнутым ротором, трехфазного и однофазного типа, а также его конструкцию и схемы подключения.
Строение двигателя
Основные элементы электродвигателя это – статор, ротор, их обмотки и магнитопровод.
Преобразование электрической энергии в механическую происходит во вращающейся части мотора – роторе.
У двигателя переменного тока, ротор получает энергию не только за счет магнитного поля, но и при помощи индукции. Таким образом, они называются асинхронными двигателями. Это можно сравнить с вторичной обмоткой трансформатора. Эти асинхронные двигатели еще называют вращающимися трансформаторами. Чаще всего используется модели рассчитанные на трех фазное включение.
Конструкция асинхронного двигателяНаправление вращения электродвигателя задается правилом левой руки буравчика: оно демонстрирует связь между магнитным полем и проводником.
Второй очень важный закон – Фарадея:
- ЭДС наводиться в обмотке, но электромагнитный поток меняется во временем.
- Величина наведенной ЭДС прямо пропорциональна скорости изменения электрического потока.
- Направление ЭДС противодействует току.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателяКогда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Как вращается ротор
Вращающийся магнитный поток проходит через воздушный зазор между статором, ротором и обмоткой неподвижных проводников в роторе. Этот вращающийся поток, создает напряжение в проводниках ротора, тем самым заставляя наводиться в них ЭДС. В соответствии с законом Фарадея электромагнитной индукции, именно это относительное движение между вращающимся магнитным потоком и неподвижными обмотками ротора, которые возбуждает ЭДС, и является основой вращения.
Двигатель с короткозамкнутым ротором, в котором проводники ротора образовывают замкнутую цепь, в следствии чего возникает ЭДС наводящая ток в нем, направление задается законом Ленса, и является таким, чтобы противодействовать причине его возникновения. Относительное движение ротора между вращающимся магнитным потоком и неподвижным проводником и является его действием к вращению. Таким образом, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся поток на обмотках статора, пытаясь поймать его. Частота наведенной на него ЭДС такая же, как частота питания.
Гребневые асинхронные двигатели
Когда напряжение питания низкое, возбуждение обмоток короткозамкнутого ротора не происходит. Это обусловлено тем что, когда число зубцов статора и число зубьев ротора равное, таким образом вызывая магнитную фиксацию между статором и ротором. Этот физический контакт иначе называется зубо-блокировкой или магнитной блокировкой. Данная проблема может быть преодолена путем увеличения количества пазов ротора или статора.
Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет. Формула
QC = Uс I2 = U2 I2 / sin2
Схема: Подключение асинхронного двигателяИз которой следует, что электрические машины переменного тока двухфазного или однофазного типа, должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления . Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.
Электромагнитная муфта сцепленияПохожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Если увеличивается нагрузка – уменьшается момент.
- Относительно небольшой пусковой момент.
Асинхронный двигатель: принцип работы и устройство :
Из всего спектра выпускаемых в настоящее время электрических моторов наибольшее распространение получил двигатель асинхронный трёхфазный. Практически половина производимой в мире электроэнергии используется именно этими машинами. Они широко применяются в металлообрабатывающей и деревообрабатывающей промышленности. Асинхронный двигатель незаменим на фабриках и насосных станциях. Без таких машин не обойтись и в быту, где они используются и в другой домашней технике, и в ручном электроинструменте.
Область применения этих электрических машин расширяется с каждым днём, так как совершенствуются и сами модели, и используемые для их изготовления материалы.
Каковы же основные части этой машины
Разобрав двигатель асинхронный трехфазный, можно наблюдать два главных элемента.
1. Статор.
2. Ротор.
Одна из важнейших деталей — статор. На фото сверху эта часть двигателя расположена слева. Он состоит из следующих основных элементов:
1. Корпус. Он необходим для соединения всех деталей машины. Если двигатель небольшой, то корпус изготавливают цельнолитым. В качестве материала используют чугун. Применяются также сталь или сплавы алюминия. Иногда корпус малых двигателей совмещает функции сердечника. Если же двигатель имеет большие размеры и мощность, то корпус сваривают из отдельных частей.
2. Сердечник. Этот элемент двигателя запрессовывается в корпус. Служит он для улучшения качеств магнитной индукции. Выполняется сердечник из пластин электрической стали. Для того чтобы снизить потери, неизбежные при появлении вихревых токов, каждая пластина покрывается слоем специального лака.
3. Обмотка. Она размещается в пазах сердечника. Состоит из витков медной проволоки, которые собираются в секции. Соединённые в определённой последовательности, они образуют три катушки, которые в совокупности являются обмоткой статора. Подключается она непосредственно к сети, поэтому называется первичной.
Ротор — это подвижная часть двигателя. На фото он находится справа. Служит он для преобразования силы магнитных полей в механическую энергию. Состоит ротор асинхронного двигателя из следующих деталей:
1. Вал. На хвостовиках его закреплены подшипники. Они запрессовываются в щиты, крепящиеся болтами к торцовым стенкам коробки статора.
2. Сердечник, который собирается на валу. Состоит из пластин специальной стали, обладающей таким ценным свойством, как низкое сопротивление магнитным полям. Сердечник, обладая формой цилиндра, и является основой для укладки обмотки якоря. Роторная, или, как её ещё называют, вторичная обмотка получает энергию благодаря магнитному полю, которое появилось вокруг катушек статора при прохождении по ним электрического тока.
Двигатели по типу изготовления подвижной части
Различают двигатели:
1. Имеющие короткозамкнутую обмотку ротора. Один из вариантов исполнения этой детали показан на рисунке.
Асинхронный двигатель с короткозамкнутым ротором имеет обмотку, сделанную из алюминиевых стержней, которые располагаются в пазах сердечника. В торцевой части они замкнуты кольцами накоротко.
2. Электродвигатели, имеющие ротор, изготовленный с контактными кольцами.
У обоих типов асинхронных двигателей конструкция статора одинаковая. Различаются они только исполнением якоря.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках. Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле. Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью. Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Что происходит в обмотке статора
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Как работает ротор
Теперь необходимо рассмотреть, какие процессы возникают во вторичной обмотке. Асинхронный двигатель с короткозамкнутым ротором имеет конструкционную особенность. Дело в том, что к его якорной обмотке напряжение не подводится. Оно там возникает благодаря магнитоиндукционной связи с первичной обмоткой. Поэтому и происходит процесс, обратный тому, что наблюдался в статоре, в соответствии с законом, который гласит, что при пересечении проводника, а в нашем случае это короткозамкнутая обмотка ротора, магнитным потоком в нём возникает электрический ток. Откуда берётся магнитное поле? Оно возникло вокруг первичной катушки при подключении трёхфазного источника питания.
Соединим статор и ротор. Что получится?
Таким образом, имеем асинхронный короткозамкнутый двигатель с ротором, в обмотке которого проходит электрический ток. Он и будет причиной возникновения магнитного поля вокруг якорной обмотки. Однако полярность этого потока будет отличаться от созданного статором. Соответственно, и сила, образуемая им, будет вступать в противодействие с той, которая вызвана магнитным полем первичной обмотки. Это и приведёт в движение ротор, так как на нём собрана вторичная катушка, и хвостовики вала якоря закреплены в корпусе двигателя на подшипниках.
Рассмотрим ситуацию взаимодействия сил, возникающих от магнитных полей статора и ротора, с течением времени. Знаем, что магнитное поле первичной обмотки вращается и обладает определённой частотой. Созданная им сила будет перемещаться, имея аналогичную скорость. Это заставит асинхронный двигатель заработать. И его ротор будет свободно вращаться вокруг оси.
Эффект скольжения
Ситуация, когда силовые потоки ротора как бы отталкиваются от вращающегося магнитного поля статора, получила название скольжения. Следует отметить, что частота асинхронного двигателя (n1) всегда меньше той, с которой перемещается магнитное поле статора. Объяснить это можно так. Чтобы в роторной обмотке возник ток, она должна быть пересечена магнитным потоком с определённой угловой скоростью. И поэтому справедливо утверждение, что скорость вращения вала больше либо равна нулю, но меньше интенсивности перемещения магнитного поля статора. Ротор имеет частоту вращения, зависящую от силы трения в подшипниках, а также от величины отбора мощности с вала ротора. Поэтому он как бы отстаёт от магнитного поля статора. Именно из-за этого частота называется асинхронной.
Таким образом, электроэнергия питающего источника преобразовалась в кинетическую энергию вращающегося вала. Скорость его вращения прямо пропорциональна частоте тока питающей сети и количеству пар полюсов статора. Для увеличения частоты вращения якоря можно использовать частотные преобразователи. Однако работа этих устройств должна быть согласована с количеством пар полюсов.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».
На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.
Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Как сделать реверс
При возникновении потребности осуществить пуск асинхронного двигателя, изменив направление вращения якоря, надо просто поменять местами два провода подключаемого источника трехфазного напряжения.
Однофазный асинхронных двигателей
В быту проблематично использовать трёхфазные двигатели из-за отсутствия требуемого источника напряжения. Поэтому существует однофазный асинхронный двигатель. Он также имеет статор, но с существенным конструкционным отличием. Оно заключается в количестве и способе расположения обмоток. Это определяет и схему запуска машины.
Если однофазный асинхронный двигатель имеет статор с двумя обмотками, то расположены они будут со смещением по окружности под углом в 90˚. Катушки называются пусковой и рабочей. Соединяются они параллельно, но, чтобы создать условия для появления вращающееся магнитного поля, дополнительно вводится активное сопротивление или конденсатор. Это создаёт сдвиг фаз токов обмоток, близкий к 90˚, благодаря чему создаётся условие для образования вращающегося магнитного поля.
Если статор имеет только одну катушку, то подключённый к ней однофазный источник питания будет причиной пульсирующего магнитного поля. В замкнутой накоротко обмотке ротора появится переменный ток. Он станет причиной возникновения своего магнитного потока. Результирующая двух образовавшихся сил будет равна нулю. Поэтому для запуска двигателя, имеющего такую конструкцию, требуется дополнительный толчок. Создать его можно, подключив конденсаторную схему пуска.
Подключить двигатель к однофазной цепи
Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно. Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера. Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели. Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя. Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
Пуск электродвигателя с фазным ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 — 7) Iном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.
Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1, а, кривая 3), если критическое скольжение двигателя с фазным роторомsкр = (R2′ + Rд’) / (Х1 + Х2′) = 1,
где Rд’ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) Mном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.
Рис. 2. Пусковые характеристики трехфазного асинхронного двигателя с фазным роторомПереключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
фазный ротор, электродвигатель
Всего комментариев: 0
Асинхронный электродвигатель с фазным ротором, его достоинства и недостатки
В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы.
Асинхронный электродвигатель с фазным ротором
В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек 1, сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам 3, насаженным на вал 2 и электрически изолированным как от вала, так и друг от друга. С помощью щеток 4, находящихся в скользящем контакте с кольцами 3, имеется возможность включать в цепи фазных обмоток регулировочные реостаты 5.
Схема асинхронного электродвигателя с фазным ротором
Рис. 1
У фазного ротора обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь.
Асинхронный электродвигатель с фазным ротором
Рис. 2: 1 – станина; 2 – обмотка статора; 3 – ротор; 4 – контактные кольца; 5 – щетки
Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины.
Достоинства асинхронного электродвигателя с фазным ротором
- большой начальный вращающий момент;
- возможность кратковременных механических перегрузок;
- приблизительно постоянная скорость при различных перегрузках;
- меньший пусковой ток по сравнению с электродвигателями с короткозамкнутым ротором;
- возможность применения автоматических пусковых устройств.
Недостатки асинхронного электродвигателя с фазным ротором
- большие габариты;
- cos φ и КПД ниже, чем у электродвигателей с короткозамкнутым ротором.
Достоинства асинхронного электродвигателя с фазным ротором
Принцип работы асинхронного двигателя с короткозамкнутым ротором
Пожалуй, нет ни одного серьезного механизма или машины, где не применялись бы электрические двигатели. В автомобиле, с стиральной машине, сельхозтехнике и мелких бытовых приборах — везде используется электрический двигатель. Наибольшее распространение получил асинхронный электрический двигатель и о нем сегодня мы поговорим.
Содержание:
- Синхронные и асинхронные двигатели в машиностроении и в быту
- Преимущества АС двигателя
- Двигатель с фазным ротором
- Короткозамкнутый ротор и его особенности
- Как работает магнитное поле
Синхронные и асинхронные двигатели в машиностроении и в быту
Благодаря своей простоте и экономичности, асинхронный электромотор может пригодиться не только в машиностроении и в быту, но мы рассмотрим именно такие двигатели, которые встречаются чаще всего. Причиной популярности асинхронного двигателя переменного тока стали его доступность, возможность подключения к любой розетке электропитания без всяких выпрямителей и согласовательных устройств, а также простотой обслуживания и ремонта в случае чего.
Существуют два вида асинхронных электромоторов — с короткозамкнутым ротором и с фазным ротором. Но для начала стоит разобраться в конструкции и узнать принцип работы асинхронного двигателя с короткозамкнутым ротором, после чего станет понятна причина его популярности. Несмотря на то, что асинхронный мотор был разработан еще в конце 19 века, до сих пор его конструкция особенных изменений не претерпела.
Преимущества АС двигателя
Главной особенностью характеристик этого двигателя и самым ценные их проявлением, считают тот факт, что нагрузка на двигатель практически никак не зависит от частоты вращения вала. Магнитные поля и электродвижущую силу изучают уже лет двести, а наш асинхронный двигатель стал лучшим подтверждением тому, это один из самых эффективных методов трансформации энергии.
Принцип работы этого мотора как раз основан на взаимодействии подвижного магнитного поля и токопроводящего элемента, распложенного внутри этого поля. Двигатель, как известно еще со школьной скамьи, состоит из двух базовых узлов — рoтора и статора. Статoр как раз генерирует вращающееся магнитное поле. Конструктивно, статoр представляет собой металлический сердечник, на него намотана обмотка из медной проволоки с термолаковой изоляцией.
Внутри статора, внутри его магнитного поля, поместили ротор, который представляет собой вал с сердечником и обмоткой. На рисунке ниже изображена схема устройства асинхронного мотора.
По схеме понятно, что статор состоит из наборных пластин и нескольких обмоток, которые намотаны на пластинчатый сердечник. Эти обмотки могут подсоединяться по разным схемам, в зависимости от типа напряжения. Каждая их обмоток сдвинута друг отнoсительно друга на 120 градусов. А ротор такого двигателя может быть принципиально двух типов.
Двигатель с фазным ротором
Ротор фазного типа принципиально не отличается обмoткой от статора. Это трехфазная обмотка, концы которой соединены по схеме «звезда». Свободные концы обмоток подключены к токоприемным кольцам. Кольца контактируют с проводником посредством щеток и поэтому есть возможность установить в схему подключения дополнительный ограничивающий резистор.
Резистор, как устройство плавного пуска, служит для того, чтобы была возможность уменьшать значения пускового тока, который может достигать довольно крупных значений.
Короткозамкнутый ротор и его особенности
Короткoзамкнутый ротор представляет собой наборной сердечник из специальной листовой стали. Сердечник имеет каналы, которые не изолируют обмотки друг от друга, а наоборот — они залиты расплавленным легкоплавким легким металлом, а он образует прутки, которые в торцах фиксируются на кольцах.
Металл, из которого выполняют эти прутки и которым заливают пространства между сердечниками, зависит от требуемых характеристик двигателя и это может быть как медь, так и алюминий.
Как работает магнитное поле
Работает двигатель на основе процесса получения механической работы в результате воздействия на проводник движущегося магнитного поля. На обмотку статора подают напряжение, причем каждая фаза образует свой магнитный поток. Частота магнитного потока напрямую зависит от частоты подаваемого тока на концы обмотки.
За счет того, что обмотки сдвинуты на 120 градусов, сдвигаются и магнитные поля, причем сдвигаются они как в пространстве, так и во времени. Суммарный магнитный поток и будет вращать ротор двигателя. Это происходит потому, что вращающийся поток суммы частот каждой из обмоток, образуют в роторе электродвижущую силу. Поскольку ротор — короткозамкнутый, то он имеет свою собственную электрическую цепь, которая взаимодействуя с магнитным полем статора, образует крутящий момент, направленный в сторону движения магнитного потока статора.
Следовательно, принцип работы асинхронного двигателя с короткозамкнутым ротором, объясняется вращением магнитного суммарного потока статора и его взаимодействия с возникшим в результате подачи тока, магнитным полем ротора.
Читайте также:
Что такое двигатель с фазным ротором и как он работает?
Электродвигатели — машины, преобразующие электричество в механическую энергию — повсеместно используются в мире машиностроения. Они являются краеугольным камнем инженерных достижений, таких как лифты, насосы и даже электромобили, благодаря способности использовать эффект электромагнитной индукции. Эти так называемые асинхронные двигатели используют переменный ток и электромагнетизм для создания вращательного движения и имеют множество конфигураций. Основное внимание в этой статье будет уделено специальному типу асинхронного двигателя переменного тока, известному как двигатели с фазным ротором.Хотя эти двигатели используются только в особых случаях, они имеют явное преимущество перед другими популярными вариантами (короткозамкнутый ротор, синхронные двигатели и т. Д.) Благодаря своим уникальным характеристикам. Будут изучены анатомия и принцип действия этих двигателей, а также конкретные характеристики, которые делают их столь важными для приложений, в которых не могут быть реализованы другие, более популярные асинхронные двигатели.
Что такое двигатели с фазным ротором?
Двигатели с фазным ротором представляют собой специализированный тип двигателей переменного тока и работают во многом так же, как и другие асинхронные двигатели.Они состоят из двух основных компонентов: внешнего статора и внутреннего ротора, разделенных небольшим воздушным зазором. Статор, как правило, одинаков для всех асинхронных двигателей и состоит из металлических пластин, удерживающих на месте обмотки из медной или алюминиевой проволоки. В статоре есть три отдельные катушки, которые питаются трехфазным переменным током, что просто означает, что каждая из них питается от отдельного переменного тока. Это не всегда так, поскольку некоторые двигатели являются однофазными двигателями, но двигатели с фазным ротором обычно всегда трехфазные.Тем не менее, эти три фазы создают магнитное поле, которое смещается вместе с переменными токами. Это создает вращающееся магнитное поле (RMF), которое действует на ротор. В двигателях с фазным ротором ротор «намотан» проводом, похожим на статор, а их концевые выводы соединены с 3 контактными кольцами на выходном валу. Эти контактные кольца прикреплены к щеткам и блокам резисторов переменной мощности, где операторы могут изменять скорость двигателя, изменяя сопротивление через катушки ротора. Эти контактные кольца позволяют регулировать скорость и крутящий момент и являются определяющей особенностью двигателей с фазным ротором (именно поэтому эти двигатели часто называют двигателями с фазным ротором).
Как работают двигатели с обмоткой ротора?
Мы рекомендуем прочитать нашу статью об асинхронных двигателях, чтобы понять основные законы, общие для всех асинхронных машин, но эта статья кратко объяснит научные основы работы двигателя с фазным ротором.
Эти двигатели классифицируются как асинхронные двигатели, в которых существует несоответствие (известное как «скольжение») между скоростью RMF статора (синхронная скорость) и выходной скоростью (номинальная скорость). При создании необходимого тока, напряжения и магнитной силы в обмотках ротора двигатель всегда будет испытывать скольжение между вращающимся полем и ротором.Не стесняйтесь посетить нашу статью о типах двигателей переменного тока, чтобы узнать больше.
Двигатели с фазным ротором отличаются тем, как их ротор взаимодействует со статором. Обмотки ротора подключены к вторичной цепи, содержащей контактные кольца, щетки и внешние резисторы, и питаются от отдельного трехфазного переменного тока. При запуске внешнее сопротивление, передаваемое этой вторичной цепи, приводит к тому, что ток ротора снижает силу RMF статора (он работает более «синфазно» с RMF статора).Это означает, что скорость вращения можно контролировать, изменяя сопротивление, когда двигатель достигает 100% скорости, что позволяет операторам выбирать пусковой момент и рабочие характеристики. Это приводит к плавному запуску, высокому начальному крутящему моменту, низкому начальному току и способности регулировать скорость вращения, чего нельзя достичь с помощью более простых конструкций, таких как двигатели с короткозамкнутым ротором (более подробную информацию об этой конструкции можно найти в нашей статье на двигателях с короткозамкнутым ротором).
Технические характеристики двигателя с фазным ротором
Спецификации двигателя с фазным ротором включают понимание спецификаций всех асинхронных двигателей, которые можно просмотреть в нашей статье об асинхронных двигателях.В этой статье будут освещены важные концепции двигателей с фазным ротором, которые необходимо понять перед покупкой одного из них, но помните, что это не все.
Пусковой ток
Статор RMF вращается на полной скорости при запуске трехфазного асинхронного двигателя, в то время как ротор изначально находится в состоянии покоя. Ротор испытывает индуцированный ток, когда через него проходит RMF статора, и единственным ограничивающим фактором для этого тока является сопротивление обмоток ротора (ток = напряжение / сопротивление).Это приводит к увеличению тока в роторе, что увеличивает потребность в токе статора и, следовательно, вызывает «бросок» пускового тока в двигатель. Этот ток может быть в два-семь раз выше номинального тока, указанного на паспортной табличке, и может вызвать серьезные проблемы при высоком напряжении. Когда двигатель достигает своей номинальной скорости, ротор генерирует «обратную ЭДС» в статоре, которая снижает ток статора до номинального уровня. Пусковой ток — это то, что минимизируется в двигателях с фазным ротором за счет увеличения сопротивления обмоток ротора (I = V / R, где R увеличивается), и почему они имеют такие плавные пусковые характеристики.
Крутящий момент двигателя и кривая крутящего момента-скорости
Самая важная спецификация двигателей с фазным ротором — это то, как они работают при включении, и это визуализируется с помощью графиков крутящего момента-скорости. Асинхронные двигатели могут значительно превышать как их номинальный крутящий момент, так и ток, когда они не работают на 100% скорости; Кривые крутящего момента / скорости отображают это переходное поведение, а на Рисунке 1 показана общая кривая крутящего момента / скорости для асинхронных двигателей с обозначенными важными точками.
Рисунок 1: Кривая крутящий момент-скорость для асинхронных двигателей.
Пусковой крутящий момент — это крутящий момент, возникающий при начальном броске тока, который всегда превышает номинальный крутящий момент. Вытягивающий момент — это максимальный крутящий момент, достигнутый до установившегося режима, а номинальный крутящий момент — это то, что обеспечивается, когда двигатель работает на 100% скорости. Эта связанная скорость не совсем равна синхронной скорости RMF, и это скольжение показано на рисунке 1.
Двигатели, в которых используются популярные конструкции с короткозамкнутым ротором, имеют ограниченный контроль над кривыми крутящего момента и скорости (подробнее см. В нашей статье о двигателях с короткозамкнутым ротором).Стержни ротора с короткозамкнутым ротором закорочены; это приводит к невозможности изменить сопротивление ротора, что означает, что единственный способ повлиять на скорость вращения — это изменить напряжение (I = V / R, где R является постоянным). Это может вызвать проблемы в больших двигателях, где необходимый входной ток может стать опасно высоким. Двигатели с фазным ротором решают эту проблему, изменяя сопротивление ротора с помощью вторичной цепи, присоединенной к блоку сопротивления переменной мощности и контактным кольцам. За счет увеличения сопротивления в роторе через контактные кольца, тяговый момент может быть достигнут на гораздо более низких скоростях, что обеспечивает более высокий начальный крутящий момент и более низкий пусковой ток.При достижении синхронной скорости сопротивление ротора также может быть закорочено, в результате чего двигатель с фазным ротором ведет себя так, как если бы он был двигателем с короткозамкнутым ротором. На рис. 2 показано влияние увеличения сопротивления ротора на выходной крутящий момент.
Рис. 2: Как изменение сопротивления ротора влияет на пусковой и отрывной момент.
Из этого графика видно, что двигатель с фазным ротором обеспечивает управление током, крутящим моментом и скоростью намного лучше, чем другие конструкции. Изменяя сопротивление, этим двигателям потребуется меньший начальный пусковой ток для компенсации, они будут иметь более сильный пусковой крутящий момент и могут максимизировать свой пусковой крутящий момент, также сделав его крутящим моментом отрыва (пример кривой R2 на рисунке 2).Такой подход приводит к созданию двигателя с регулируемой скоростью, высоким пусковым моментом и низким пусковым током, с возможностью изменения этих характеристик по желанию оператора.
Заявки и критерии отбора
Двигатели с фазным ротором могут справиться с тем, что другие асинхронные двигатели не могут, а именно с регулированием скорости, тока и крутящего момента. Способность увеличивать сопротивление ротора при запуске двигателя позволяет плавно разгонять тяжелые нагрузки до номинальной скорости. Когда необходимо минимизировать пусковой ток или существует ограничение пускового тока ниже, чем могут выдержать двигатели с короткозамкнутым ротором / синхронные двигатели, рассмотрите возможность использования двигателя с фазным ротором.
У двигателей с фазным ротором есть недостатки, и они являются следствием их сложной конструкции. Вторичный контур создает больше возможностей для ошибки, а щетки с контактным кольцом могут представлять угрозу безопасности, если не проверять их регулярно (изношенные щетки могут вызвать искрение и увеличить риск возгорания). Эти двигатели также дороги в обслуживании, что увеличивает их и без того дорогостоящую цену. Их сложность также снижает общий КПД двигателя, и двигатель с короткозамкнутым ротором следует выбирать, если эффективность является основной проблемой или конструктивным ограничением.
Несмотря на то, что двигатель с фазным ротором и его регулируемые характеристики крутящего момента и скорости являются дорогими и менее эффективными, они отлично подходят для управления большими шаровыми мельницами, большими прессами, насосами с регулируемой скоростью, кранами, подъемниками и другими высокоинерционными нагрузками. Они также отлично подходят для любого приложения, которому нужен плавный запуск и возможность изменять скорость. Они охватывают основы, недоступные для других асинхронных двигателей, и неоценимы для разработчиков, которым необходим абсолютный контроль над скоростью и крутящим моментом.
Сводка
В этой статье представлено понимание того, что такое двигатели с фазным ротором, как они работают и каковы их основные характеристики, определяющие, когда они должны быть указаны по сравнению со стандартными асинхронными двигателями.Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://www.egr.unlv.edu/~eebag/Induction%20Motors.pdf
- https://oaktrust.library.tamu.edu/bitstream/handle/1969.1/163595/T17123-130.pdf? последовательность = 1 & isAllowed = y
- http://www.animations.physics.unsw.edu.au/jw/electricmotors.html
- https://scholar.cu.edu.eg
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Индукционная машина с намотанным ротором— обзор
5.9.4 Моделирование индукционных генераторов с двойным питанием
Модель dq индукционного генератора с двойным питанием и с намотанным ротором аналогична модели асинхронного двигателя, представленной в уравнении (5.88). Однако есть важное исключение; напряжения ротора dq e dr и e qr , указанные в уравнении (5.88b), не равны нулю. Они равны напряжениям, подаваемым преобразователем на стороне ротора. Эквивалентная схема установившегося режима асинхронного генератора с двойным питанием показана на рисунке 5.34 со всеми количествами ротора, относящимися к статору.
Рисунок 5.34. Установившаяся эквивалентная схема индукционного генератора с двойным питанием
Трехфазное короткое замыкание в сети вызовет симметричный провал напряжения на выводах генератора и большие колебательные токи в обмотке ротора, подключенной к преобразователю на стороне ротора.Управление большими токами ротора требует большого и неэкономичного номинального напряжения ротора. Следовательно, большие токи ротора могут протекать через переключатели преобразователя и повредить их. Однако для защиты этих переключателей от повреждений можно использовать схему защиты преобразователя, называемую схемой «лом», которая подключена к обмотке ротора через встречно-параллельные тиристоры, как показано на рисунке 5.31. Когда обнаруживается большой мгновенный ток ротора в любой фазе, превышающий допустимый предел преобразователя, переключатели преобразователя немедленно блокируются, и тиристоры цепи лома срабатывают, чтобы предотвратить большое перенапряжение в звене постоянного тока.Это действие лома эффективно замыкает и обходит преобразователь и заставляет токи ротора течь в цепь лома. Поскольку генератор может работать со скоростью, значительно превышающей синхронную скорость, некоторые схемы лома могут также включать импеданс, обычно только сопротивление, последовательно с обмоткой ротора, чтобы снизить потребление реактивной мощности генератора и улучшить его электрический крутящий момент. / скоростные характеристики. Блокировка переключателей преобразователя и срабатывание схемы защиты лома происходит очень быстро и может произойти в течение 2 мс.После обхода преобразователя обмотка ротора генератора выглядит практически аналогичной обмотке обычного индукционного генератора с фазным ротором с внешним сопротивлением ротора R cb , как показано на рисунке 5.35a.
Рисунок 5.35. Асинхронный генератор с двойным питанием и срабатыванием защиты преобразователя со стороны ротора: (а) преобразователь закорочен ломом через сопротивление R cb и (б) преобразователь защищен прерывателем постоянного тока через сопротивление R Chop параллельно с конденсатором звена постоянного тока
Дальнейшие действия зависят от требований энергосистемы, к которой подключен генератор.Весь ветрогенератор может быть отключен от сети переменного тока. В качестве альтернативы может быть отключен только преобразователь ротора, но не генератор ветровой турбины, который продолжает работать как индукционная машина с фазным ротором с более высоким сопротивлением ротора. Стратегия управления преобразователем, более дружественная к сети, заключается в том, чтобы турбогенератор оставался подключенным к сети, а роторный преобразователь — подключенным к ротору, но быстро восстанавливал управление током ротора, как только токи ротора упали ниже достаточно низкого значения.
Возвращаясь к вкладу тока короткого замыкания генератора, как только преобразователь отключен и ротор закорочен через сопротивление R cb , постоянная времени переходного короткого замыкания индукционного генератора с двойным питанием равна модифицировано с помощью R cb и рассчитывается с использованием уравнения (5.134) следующим образом:
(5.135) Tcb ′ = 1ωs (Rr + Rcb) (Xσr + 11Xσr + 1Xm) ≈X′ωs (Rr + Rcb) s
Однако, в отличие от обычной асинхронной машины с фиксированной скоростью, скольжение которой всегда близко к нулю, скольжение для типичного индукционного генератора с двойной подачей может варьироваться в пределах с = 0.3 о.е. подсинхронная скорость и с = -0,2 о.е. сверхсинхронная скорость в зависимости от номинальной скорости и конструкции машины. Следовательно, используя уравнение (5.112b) и предполагая, что R cb не намного меньше, чем X ‘, изменение тока из-за трехфазного короткого замыкания приблизительно равно
(5.136a ) ir (t) ≈2Vms (1-sx′2 + Rcb2) [et / T′cbcos {(1-s) ωst + θ0-π / 2} -et / Tacos (θo-π / 2)]
где X ‘и T a имеют значения, указанные в уравнениях (5.94c) и (5.108) для одиночной обмотки ротора соответственно.
Огибающая максимального тока короткого замыкания определяется как
(5.136b) ir (t) ≈2Vms (1-sx’2 + Rcb2) [et / T’cb + et / Ta]
Очевидно, в общем случае индукционного генератора с двойным питанием коэффициент (1 — с ) в уравнениях (5.136a) и (5.136b) нельзя приравнять к единице, если начальная скорость генератора не близка к синхронной скорости. Из уравнения (5.136a) частота f sc тока короткого замыкания статора равна
(5.136c) fsc = (1-s) fsHz
, где s — скольжение генератора на единицу, а f s — номинальная частота системы в Гц. Разница между частотой тока короткого замыкания статора и номинальной частотой влияет на момент времени, который соответствует первому и последующим пикам тока короткого замыкания по уравнению (5.136a). В то время как этот момент времени почти равен половине цикла номинальной частоты для синхронных машин и асинхронных машин с фиксированной скоростью, это будет иметь место только в случае генератора с двойным питанием, если скорость его ротора изначально близка к синхронной скорости.Если генератор с двойным питанием первоначально работает с высокой выходной активной мощностью, например при скольжении с = -0,15 о.е., его скорость будет сверхсинхронной, а частота тока короткого замыкания, предполагая систему с частотой 50 Гц, составляет f sc = 1,15 × 50 Гц = 57,5 Гц. Результатом этого является то, что момент первого пика тока произойдет раньше обычного полупериода промышленной частоты. И наоборот, если машина изначально работает на субсинхронной скорости, e.грамм. при скольжении с = 0,2 о.е., имеем f sc = 0,8 × 50 Гц = 40 Гц и момент первого пика тока наступит после полупериода номинальной частоты. Уравнение (5.136a) также предполагает, что величина тока обратно пропорциональна (1 — с ), то есть начальная величина тока выше, если генератор первоначально работает на минимальной подсинхронной скорости.
В упомянутой выше конструкции генератора с двойным питанием, подходящей для сети, цепь лома быстро отключается, а переключатели преобразователя разблокируются после некоторой временной задержки с момента возникновения тока короткого замыкания.Задержка предназначена для того, чтобы мгновенный ток ротора, особенно его постоянная составляющая, снизился до достаточно низкого значения. Выключение лома и разблокировка переключателей преобразователя позволяет преобразователю восстановить контроль над токами ротора. Это позволяет генератору подавать заданное и постоянное значение тока короткого замыкания статора, величина которого зависит от сохраняемого напряжения статора. Обычно этот постоянный ток является максимальным реактивным током, который может постоянно подаваться генератором в условиях пониженного напряжения на клеммах без превышения его номинального значения.
Если место повреждения находится в сети и достаточно удалено от генератора, предел тока преобразователя на стороне ротора не может быть превышен, и, следовательно, цепь защитного лома не будет работать. Таким образом, на величину подаваемого тока статора может влиять и изменять стратегия управления напряжением / реактивной мощностью преобразователя. Например, рассмотрим преобразователь на стороне ротора, работающий в режиме управления напряжением на клеммах статора, с использованием АРН, действующего через преобразователь для обеспечения требуемого изменения напряжения ротора.Степень влияния АРН на ток короткого замыкания статора, подаваемый генератором, зависит от параметров системы управления преобразователем, например постоянные усиления и времени, а также постоянная времени переходного процесса короткого замыкания генератора T ‘. Анализ, аналогичный представленному в разделе 5.4.7 для синхронного генератора без демпферной обмотки, также может быть использован здесь для индукционного генератора с двойным питанием намотанного ротора. Таким образом, если предполагается мгновенное или ступенчатое изменение напряжения ротора, ток статора начинает увеличиваться с постоянной времени, равной постоянной времени короткого замыкания индукционного генератора T ‘. Это изменение будет наложено на ток, вызванный коротким замыканием, который затухает с той же постоянной времени T ‘. Следовательно, спад тока короткого замыкания, подаваемого генератором, может быть остановлен, и в какой-то момент ток может даже начать увеличиваться. Это поведение качественно аналогично поведению синхронного генератора, показанного на рис. 5.14, хотя время, когда ток может начать увеличиваться, может быть намного короче и составлять всего несколько циклов промышленной частоты.Если это происходит во время отключения тока автоматического выключателя, то это увеличение необходимо учитывать при оценке работы автоматических выключателей при отключении при коротком замыкании.
Поведение тока короткого замыкания генератора с двойным питанием зависит от того, является ли сбой сбалансированным или несимметричным. Во время несбалансированных КЗ в сети, которые создают большое напряжение NPS на клеммах генератора и соответствующий большой ток ротора NPS, может возникнуть постоянная работа лома до устранения неисправности.
Стратегии защиты преобразователя, используемые в технологии генераторов с двойным питанием, все еще развиваются. Альтернативой использованию схемы с ломом является стратегия, которая блокирует переключатели преобразователя, но регулирует напряжение конденсатора звена постоянного тока с помощью цепи прерывателя постоянного тока, подключенной параллельно конденсатору звена постоянного тока. Схема прерывателя постоянного тока представляет собой управляемый резистор силовой электроники, то есть переменный резистор. Блокировка переключателей преобразователя и работа цепи прерывателя постоянного тока параллельно с конденсатором звена постоянного тока представлена, как показано на рисунке 5.35 (б). Влияние преобладающего сопротивления прерывателя постоянного тока R Chop на поведение тока короткого замыкания статора машины аналогично влиянию R cb цепи лома, показанной на рисунке 5.35 (a).
Включение вклада тока короткого замыкания в программы анализа фиксированного импеданса в установившемся режиме требует знания изменения во времени тока короткого замыкания в течение периода короткого замыкания. Это изменение может потребоваться для близких и удаленных неисправностей, т.е.е. с ломом или без него или другим защитным действием преобразователя с использованием подробных программ моделирования во временной области и с учетом стратегии управления преобразователем напряжения / реактивного тока. Производители лучше всего могут предоставить такую информацию коммунальным предприятиям энергосетей.
Асинхронный двигатель с фазным ротором Экономия
Асинхронные двигатели с большим фазным ротором (WRIM) уже несколько десятилетий используются в некоторых отраслях промышленности. В цементной и горнодобывающей промышленности мощные WRIM используются на больших мельницах, где они имеют преимущество в виде контролируемых пусковых характеристик и регулируемой скорости.Эти двигатели также используются в больших насосах в водопроводной и канализационной промышленности.
WRIM имеет трехфазный статор с обмоткой, который обычно подключается непосредственно к системе питания. Ротор имеет трехфазную обмотку с тремя выводами, подключенными к отдельным контактным кольцам, которые обычно подключаются к жидкостному реостату или группе резисторов. Реостат используется для запуска и может быть отключен, когда двигатель наберет нужную скорость. Изменяя сопротивление ротора с помощью реостата, можно изменять скорость двигателя.В прошлом мощность, рассеиваемая реостатом, терялась в виде тепла; однако, используя привод с регулируемой скоростью вместо реостата, мощность скольжения может быть восстановлена и возвращена в сеть, таким образом, экономя энергию. Кроме того, используя привод для увеличения мощности, снимаемой с ротора, можно снизить скорость двигателя. В качестве бонуса, подавая мощность на ротор через привод, двигатель может работать выше синхронной скорости. Скорость, конечно, должна быть в пределах проектных ограничений двигателя.
В системе восстановления мощности скольжения используется современный низковольтный привод с широтно-импульсной модуляцией.Эта новая реализация основана на стандартной линейке низковольтных приводов асинхронных двигателей TMEIC, используемых в обрабатывающих отраслях, таких как обработка металлов и производство бумаги. Оборудование очень надежное и знакомое и подходит для новых или существующих двигателей. Мощность скольжения представляет собой низкое напряжение и составляет лишь небольшую часть от общей мощности двигателя, поэтому требуемый привод имеет малую мощность и более низкую стоимость, чем полноразмерный привод среднего напряжения.
Расчеты для WRIM мощностью 5000 л.с., работающего на 90% полной скорости, показывают, что рекуперированная энергия составляет 360 кВт на сумму более 200 000 долларов в год.
Ручные регуляторы скорости для асинхронных двигателей с фазным ротором
ЦЕЛИ
• укажите три причины, по которым регуляторы скорости используются с фазным ротором. асинхронные двигатели.
• перечислить и описать физическую конструкцию двух основных типов руководств. регуляторы скорости.
• объяснить работу контроллера лицевой панели с защитным запуском устройство.
• объяснить работу барабанного контроллера.
• краткое изложение положений Национального электротехнического кодекса относительно проводов. размер для цепи статора, размер провода для цепи ротора, пусковой защита от перегрузки и защита от перегрузки.
• Нарисуйте электрические схемы для управления двигателем с фазным ротором.
Ручное управление скоростью для двигателей с фазным ротором быстро устаревает. Однако электромонтажнику по-прежнему необходимы практические знания операции этого типа контроля.
Для многих промышленных применений требуется индукция с фазным ротором. двигатели с регуляторами скорости. Этот блок описывает детали операции ручных регуляторов скорости и их подключение к двигателям с фазным ротором. Информация о правилах Национального электротехнического кодекса, применимых к роторам с фазой. Также представлены асинхронные двигательные установки.
Причины использования регуляторов скорости
Регуляторы скорости используются с асинхронными двигателями с фазным ротором для трех основные причины:
• для ограничения пускового скачка тока на двигатель путем вставки сопротивления в контуре ротора.
• для улучшения пускового момента асинхронного двигателя с фазным ротором путем вставки сопротивление в цепи ротора.
• для управления скоростью асинхронного двигателя с фазным ротором путем изменения сопротивление в цепи ротора.
КОНТРОЛЛЕР ЛИЦЕВОЙ ПАНЕЛИ
Самая простая форма ручного регулятора скорости — это контроллер на лицевой панели. (1). В контроллерах этого типа три набора контактных кнопок монтируются на панели.Каждый набор контактных кнопок подключается к отдельному резистор с отводом, расположенный в коробке регулятора скорости. Значение сопротивления каждой секции резистора изменяется с помощью контактного плеча. Для лицевой панели Контроллер, показанный на 1, обратите внимание, что три контактных плеча соединены в общей точке в центре. Ручка, прикрепленная к одной из рук, движется все руки одновременно. Эти рычаги разнесены на 120 механических градусов друг от друга. так что равное количество сопротивления может быть включено или отключено от каждого отвода резистор.Этот ручной регулятор скорости на лицевой панели подключен к трехфазному расположение звезды.
илл. 2 показаны соединения между контроллером скорости на планшайбе и асинхронным двигателем с фазным ротором. Как трехфазный двигатель с фазным ротором запускается, все сопротивление регулятора скорости вставляется в контур ротора. Цепь статора подключена через трехфазный линейное напряжение с помощью переключателя стартера двигателя, управляемого от кнопочная станция.Поскольку вставлено максимальное значение сопротивления в цепи ротора при запуске ограничивается пусковой выброс тока. В результате стартовый крутящий момент улучшается. После запуска двигателя сопротивление отключается от цепи ротора с помощью регулятора скорости до тех пор, пока желаемая скорость получается.
ил. 1 Реостат регулирования скорости со вспомогательным управляющим переключателем
для блокировки или управления переключателем магнитной линии.
Контроллер лицевой панели с защитным пусковым устройством
Если асинхронный двигатель с фазным ротором запускается со всеми регуляторами скорости отключение сопротивления цепи ротора, пусковой выброс тока к обмоткам статора будет высоким, а пусковой момент, развиваемый мотор будет плохим.
Защитное пусковое устройство используется с контроллером лицевой панели для обеспечения что двигатель запускается со всем включенным сопротивлением (3).Двигатель может быть запущен только тогда, когда руки этого особого типа контроллера находятся в медленном положении со всем сопротивлением, вставленным в ротор схема.
Регулятор скорости этого типа имеет пару замкнутых контактов. когда три подвижных рычага контроллера находятся в медленном положении. Эти контакты включены последовательно с нормально разомкнутой кнопкой пуска. Когда нажата кнопка пуска, катушка магнита поперек выключатель стартера находится под напряжением.Контакты стартера замыкаются и номинальное трехфазное линейное напряжение подается на обмотки статора. Когда мотор разгоняется, подвижные рычаги регулятора скорости можно отрегулировать для получения желаемая скорость. Когда руки перемещаются из медленного положения, лицевая панель Контакты цепи контроллера разомкнуты. Однако контакты попутных выключатель магнитного двигателя замкнут. Поскольку одна пара этих контактов действует как уплотнительный контур вокруг нормально разомкнутой кнопки и разомкнутых контактов цепи на контроллере лицевой панели, основная катушка стартера остается под напряжением, и двигатель продолжает работать.
Двигатель не может быть запущен, если регулятор скорости не в медленном позиция. Это связано с тем, что цепь управления катушкой выключателя магнитного двигателя разомкнут, так как контакты лицевой панели Контроллер открыт. Следовательно, переключатель двигателя не будет работать, когда кнопка пуска замкнута. Для запуска мотора регулируемые рычаги лицевой панели контроллера должен находиться в исходном положении.
ил. 2 Подключение регулятора скорости планшайбы к ротору с фазой
двигатель
ил.3 Планшетный контроллер с защитным пусковым устройством
А) Схема подключения ручного регулятора скорости с магнитной блокировкой.
стартер B) Принципиальная схема на рисунке 3A
КОНТРОЛЛЕР БАРАБАНА
Барабанный контроллер, рис. 4, представляет собой другой тип ручного регулятора скорости. которые могут использоваться с асинхронными двигателями с фазным ротором.
Барабанный контроллер состоит в основном из корпуса, контактных пальцев, цилиндра. сборка, и внешние резисторы.Корпус состоит из задней и концевых частей из листового металла и крышки из листового металла. Крышка надевается на концевые детали и снимается при техническом обслуживании или ремонте требуется для. Крышка может быть снабжена резиновым уплотнением, чтобы пыленепроницаемый. Электропроводка подведена к контроллеру через втулочные отверстия. или фитинги кабелепровода либо в задней панели, либо в нижнем конце дело.
Контактные пальцы барабанного контроллера являются неподвижными контактами.В к этим контактам подключаются три провода от контактных колец ротора, как и провода от внешних сетевых резисторов. Каждый контакт палец изготовлен из латуни или стали и имеет медный наконечник. Каждый палец установлен и поворачивается таким образом, чтобы можно было регулировать пружину для получения надлежащего контактное напряжение.
Барабанный контроллер также содержит вертикальный цилиндр, установленный на изолированном вал. Этот цилиндр обеспечивает подвижные контакты, замыкающие и размыкающие соединения. к различным пальцам с фиксированным контактом.Контакты на цилиндре изготовлены из катаных медных сегментов, которые перемещаются рукояткой, расположенной на верхняя часть регулятора скорости.
ил. 4 Контроллер барабана, используемый для управления двигателем с фазным ротором
Резисторы контроллера обычно устанавливаются снаружи и за контроллером. кейс. Блоки резисторов отлиты из чугуна или металлического сплава, рисунок 5. Соединительные провода от ответвлений на резисторах оканчиваются на контактных пальцах. в барабанном контроллере.
ил. 5 Резисторы, которые можно использовать в управлении двигателем с фазным ротором
Работа барабанного контроллера
Когда ручка контроллера находится в медленном положении, максимальное сопротивление контроллера вставлен в три фазы цепи ротора. (Резисторы регулятора скорости соединены звездой.) Как регулятор ручка перемещена в рабочее положение, медные контакты на цилиндре узел контактирует с различными неподвижными пальцами и секциями сопротивления отключены от цепи ротора.Когда ручка находится в рабочее положение, все сопротивление регулятора скорости отключено цепи ротора. В результате двигатель работает с номинальной скоростью.
ill 6 — схема внутренних соединений барабанного мануала. регулятор скорости. Эта схема указывает на то, что в рабочем положении выводы от контактных колец ротора. соединены вместе, а сопротивление контроллера отключен от цепи ротора.
ил.6 Подключение барабанного ручного регулятора
Цепь статора подключена непосредственно к трехфазной линии посредством выключатель двигателя, управляемый с кнопочной станции. Некоторые контроллеры барабанов могут иметь небольшую пару контактов катушки главного реле. которые закрываются только тогда, когда регулятор скорости находится в исходном положении. Эти контакты включены последовательно с нормально разомкнутой кнопкой пуска. Если сделана попытка запустить двигатель рукояткой регулятора скорости не в медленном положении, мотор не запускается.Если регулятор скорости ручка возвращается в медленное положение и нажимается кнопка пуска, двигатель будет медленно ускоряться. Затем оператор может регулировать скорость двигателя до желаемого значения. После запуска двигателя катушка контакты и нормально разомкнутая кнопка пуска шунтированы уплотнением контакторы в переключателе магнитного двигателя.
НАЦИОНАЛЬНЫЙ КОД ЭЛЕКТРИЧЕСКОГО КОДЕКСА
Национальный электротехнический кодекс в Разделе 430-2 3 требует, чтобы обязанность, чтобы проводники от контактных колец ротора к регулятору скорости иметь допустимую нагрузку (токовую нагрузку) не менее 125 процентов номинального тока полной нагрузки ротора, вторичной цепи.
Классификация нагрузки резистора | Максимальное сопротивление провода в процентах от полной нагрузки Ток ротора |
Легкий пуск Тяжелая стартовая Очень тяжелый стартовый Свет прерывистый Средняя прерывистая Тяжелая прерывистая Непрерывный | 35 45 55 65 75 85 110 |
В Кодексе перечислено несколько специальных промышленных применений, в которых резисторы отделены от контроллера, для которого процентные значения полной ток нагрузки, отличный от 125%, допускается для определения сечения проводов (жилы, соединяющие контроллер с резисторами).Как и в предыдущем абзаце, для двигателей, используемых в специальных промышленных приложениях, Код позволяет применять другие процентные значения к току полной нагрузки. номинал ротора для определения сечения провода цепи ротора.
Если резисторы регулятора скорости отделены от регулятора скорости, проводники необходимо подводить от точек подключения на резисторах к контактным пальцам. Кодекс также дает конкретную информацию о процентные значения тока полной нагрузки, которые будут использоваться для определения размера эти проводники.
Плавкая пусковая защита асинхронного двигателя с фазным ротором должна быть не более 150% номинального тока двигателя при полной нагрузке (NEC Таблица 430-152). Эта пусковая защита обычно состоит из предохранителей, расположенных в выключателе двигателя. Допустимая нагрузка на провода не менее 125 процентов. тока полной нагрузки двигателя (NEC, раздел 430-22).
Для индукционного ротора с фазным ротором должна быть предусмотрена защита от перегрузки при работе. моторы. Для двигателя мощностью более одной л.с. с маркировкой температуры подъем не более 40 градусов Цельсия, защита от перегрузки при работе должен быть рассчитан на не более 125% тока полной нагрузки двигателя. рейтинг [Раздел 430-32 (а)].Защита от рабочей перегрузки обычно состоит из тепловых перегрузок, расположенных в пускателе магнитного двигателя. Код также заявляет, что вторичные цепи асинхронных двигателей с фазным ротором, включая проводники, контроллер и резисторы, должны считаться быть защищенными устройствами защиты от перегрузки, предусмотренными в первичной цепи. [Раздел NEC 430-32 (d).]
Фраза первичная цепь, когда речь идет об асинхронных двигателях с фазным ротором, означает обмотку статора.Фраза вторичная цепь применительно к ротору с фазой асинхронные двигатели, означает цепь ротора.
МАРКИРОВКА КЛЕММ
Выводы статора трехфазного асинхронного двигателя с фазным ротором имеют маркировку. Т1, Т2 и Т3. Обратите внимание, что это система маркировки, используемая для трехфазных, асинхронные двигатели с короткозамкнутым ротором.
Выводы ротора двигателя с фазным ротором имеют маркировку M1, M2 и M3. М1 провод подключается к контактному кольцу, ближайшему к корпусу подшипника, провод M2 подключается к среднему контактному кольцу, а вывод M3 соединяется с ближайшим контактным кольцом обмотки ротора.
РЕЗЮМЕ
Ручные регуляторы скорости до сих пор находятся в эксплуатации из-за своей прочности и надежности. Концепция ручного управления двигателем с фазным ротором для управления первичной цепью (статора) и для контроля сопротивления вторичного (роторного) контура. Важно уметь понимать основные принципы управления и прочитать различные схемы управления. Рабочий знание принципа работы двигателя с фазным ротором помогает во всех типах двигателей теория и устранение неисправностей систем управления.
ОБЗОР / ВИКТОРИНА :
A. Дайте исчерпывающие ответы на следующие вопросы.
1. Назовите три причины, по которым регуляторы скорости используются с фазным ротором. асинхронные двигатели.
2. Перечислите два основных типа ручных регуляторов скорости, используемых с фазным ротором. асинхронные двигатели.
3. Трехфазный асинхронный двигатель с фазным ротором, 230 В, мощностью 10 лошадиных сил. имеет номинальный ток статора при полной нагрузке 28 ампер и ротор при полной нагрузке номинальный ток 40 ампер на клемму.Определите требуемый размер предохранителя. для защиты от пусковой перегрузки для этого асинхронного двигателя. ____
4. Определите размер блоков тепловой защиты, необходимых для индукционной двигатель, указанный в вопросе 2. ______
5. Провод какого размера, типа THBN, следует использовать для цепи статора мотор, указанный в вопросе 2?
6. Провод какого размера, типа THHN, следует использовать для соединений между контактные кольца и регулятор скорости для рассматриваемого двигателя 3? _____
7.Провод какого размера, типа THHN, следует использовать между внешними резисторами и регулятором скорости в рассматриваемом двигателе 3, если классификация режима работы такое «Легкая прерывистая работа»? Проверьте Код, прежде чем решать эту проблему.
8. Нарисуйте электрическую схему подключения асинхронного двигателя с фазным ротором. который запускается через пускатель магнитного двигателя. переключатель управляется кнопочной станцией. Включите скорость соединения звездой контроллер в цепи ротора.
9. Какие меры предосторожности предусмотрены на некоторых регуляторах скорости для предотвращения запуск двигателя, когда регулятор скорости остается в рабочем положении?
B. Выберите правильный ответ для каждого из следующих утверждений и поместите соответствующую букву в отведенное место.
10. Какой тип регулятора скорости используется с двигателем с фазным ротором?
а. Первичный резистор c. Автотрансформатор b. Вторичный резистор d. Реактор
11.При запуске двигателя с фазным ротором в вторичная цепь и магнитный пускатель подают полное линейное напряжение до …
а. обмотки статора. c. пусковые резисторы.
г. крылья скольжения. d. первичные резисторы.
12. Выводы обмоток ротора электродвигателя с фазным ротором выведены на
.а. два контактных кольца. c. четыре контактных кольца.
г. три контактных кольца. d. центробежный переключатель.
13.Цепь статора двигателя с фазным ротором иногда называют …
а. первичный контур. c. ротор.
г. вторичный контур. d. Рамка.
14. Клеммный провод, подсоединенный к контактному кольцу, ближайшему к корпусу подшипника. это
а. T1 c. M3
к.т3 д.М1
15. Барабанный контроллер используется для …
а. реверсирование статора.
г. коммутационные сопротивления во вторичной обмотке.
г.торможение.
г. реверсирование ротора.
16. Для достижения наилучших результатов при запуске применяйте …
а. минимальное напряжение на статоре, максимальное сопротивление в роторе.
г. полное напряжение на статоре с максимальным сопротивлением в роторе.
г. полное напряжение на роторе с максимальным сопротивлением в статоре.
г. полное напряжение на статоре с минимальным сопротивлением в роторе.
Индукционная машина с фазным ротором с индивидуальной параметризацией или параметрированием в системе СИ
Описание
Блок индукционной машины с фазным ротором моделирует ротор с фазной обмоткой асинхронная машина с основными параметрами, выраженными в единице или в Международная система единиц (СИ).Асинхронная машина с фазным ротором — это разновидность индукционная машина. Все соединения статора и ротора доступны на блоке. Следовательно, вы можете моделировать режимы плавного пуска, используя переключатель между звездой и треугольником. конфигурации или за счет увеличения сопротивления ротора. Если вам не нужен доступ к ротору обмоток используйте блок Induction Machine Squirrel Cage вместо.
Подключите порт ~ 1 к трехфазной цепи. Для подключения статора в дельта-конфигурации подключите блок Phase Permute между портами ~ 1 и ~ 2 .Для соединения статора звездой конфигурации, подключите порт ~ 2 к заземленной нейтрали. или блок с плавающей нейтралью. Если вам не нужно изменять сопротивление ротора, подключите порт ротора ~ 1r ‘ к блоку плавающей нейтрали и порт ротора ~ 2r ‘ на заземленную нейтраль блокировать.
Цепь ротора относится к статору. Поэтому, когда вы используете блок в цепи, относите все дополнительные параметры цепи к статору.
Уравнения
Для реализации SI блок преобразует введенные вами значения SI в удельные значения для моделирования. Преобразованные значения основаны на том, что машина соединены по схеме «треугольник».
Для реализации на единицу необходимо указать сопротивления и индуктивности. на вкладке импедансов в зависимости от машины, подключенной по схеме треугольника. конфигурация.
Для получения информации о взаимосвязи между системой единиц СИ и единичными машинными параметрами, см. Преобразование на единицу для параметров машины.Для получения информации о параметризации на единицу, см. Система единиц на единицу.
Уравнения асинхронной машины выражаются относительно синхронной опорная рамка, определенная
, где f с рейтингом — значение Номинальная электрическая частота параметр.
Преобразование Парка отображает уравнения статора в систему отсчета, которая стационарный относительно номинальной электрической частоты.Преобразование парка определяется
, где θ e — электрический угол.
Уравнения ротора отображаются в другую систему отсчета, определяемую разница между электрическим углом и произведением угла ротора θ r и количество пар полюсов N:
Преобразование Парка используется для определения асинхронной машины на единицу. уравнения.Уравнения напряжения статора определены как
и
, где:
v ds , v qs и v 0s являются d — ось, q — ось и нулевая последовательность напряжения статора, определяемые как
[vdsvqsv0s] = Ps [vavbvc].
v , v b и v c — напряжения статора через порты ~ 1 и ~ 2 .
ω основание — удельное основание электрическая скорость.
ψ DS , ψ qs и ψ 0s являются d — ось, q — ось и нулевая последовательность потокосцепления статора.
R s — статор сопротивление.
i DS , i qs и i 0s являются d — ось, q — ось и нулевая последовательность токи статора, определенные как
[idsiqsi0s] = Ps [iaibic].
я , i b и i c — токи статора течет из порта ~ 1 в порт ~ 2 .
Уравнения напряжения ротора определены в
и
, где:
v dr , v qr и v 0r являются d — ось, q — ось и нулевая последовательность напряжения ротора, определяемые как
[vdrvqrv0r] = Pr [varvbrvcr].
v ar , v br и v cr — напряжения ротора через порты ~ 1r ‘ и ~ 2r’ .
ψ др , ψ qr , и ψ 0r являются d — ось, q — ось и нулевая последовательность потокосцепления ротора.
ω — синхронная скорость на единицу. Для синхронного кадра отсчета, значение 1.
ω r — механическое скорость вращения.
R rd — сопротивление ротора относится к статору.
и др , i qr , и и 0r являются d — ось, q — ось и нулевая последовательность токи ротора, определяемые
[idriqri0r] = Pr [iaribricr].
i ar , i br , и i cr — токи ротора течет из порта ~ 1r ‘ в порт ~ 2r ‘.
Уравнения потокосцепления статора определяются формулами
и
, где L ss — самоиндукция статора. и L м — намагничивающий индуктивность.
Уравнения потокосцепления ротора определены в
и
, где L rrd — самоиндукция ротора. относится к статору.
Крутящий момент ротора определяется
Самоиндукция статора L SS , статора индуктивность рассеяния L LS , и намагничивание индуктивность L м связаны соотношением
Самоиндукция ротора L rrd , ротор индуктивность рассеяния L lrd , и намагничивание индуктивность L м связаны соотношением
Если представлена кривая насыщения, уравнения для определения насыщенного намагничивающая индуктивность как функция намагничивающего потока:
При отсутствии насыщения уравнение сводится к
Опции построения и отображения
Вы можете выполнять действия по построению и отображению, используя в контекстном меню блока.
Щелкните блок правой кнопкой мыши и в меню выберите вариант:
— отображает машину базовые значения на единицу в командном окне MATLAB ® .
— График зависимости крутящего момента от скорость, оба измеренные в единицах СИ, в окне фигуры MATLAB с использованием текущих параметров машины.
— График зависимости крутящего момента от скорость, оба измеренные на единицу, в окне фигуры MATLAB с использованием текущих параметров машины.
— Терминал участков напряжение в зависимости от тока линии холостого хода, как на единицу, в окне рисунка MATLAB. Сюжет содержит три следа:
Ненасыщенный — индуктивность намагничивания статора (ненасыщенный).
Насыщенный — справочная таблица разомкнутой цепи ( v по сравнению с i ) вы указываете.
Derived — таблица поиска разомкнутой цепи, полученная на основе таблица поиска разомкнутой цепи ( v по сравнению с i ) вы указываете.Эти данные используются для рассчитать индуктивность насыщения намагничивания, L м_сат , и коэффициент насыщения, K s , по сравнению с магнито-потокосцепление, ψ м , характеристики.
— Насыщенность графиков коэффициент, K с , в зависимости от магнитного потока связь, ψ м , в окне фигуры MATLAB с использованием параметров машины. Этот параметр на основе других указанных вами параметров:
Данные о насыщении тока линии холостого хода, i
Данные о насыщении напряжения на клеммах, В
Индуктивность утечки, L LS
— Намагничивание графиков индуктивность, L м_сат , отн. магнитопровод, ψ м , в Окно фигуры MATLAB с использованием машинных параметров.Этот параметр на основе других указанных вами параметров:
Данные о насыщении тока линии холостого хода, i
Данные о насыщении напряжения на клеммах, В
Индуктивность утечки, L LS
Для реализации SI, v находится в V (фаза-фаза RMS) и i в А (среднеквадратичное значение).
Тепловой порт
Блок имеет шесть дополнительных тепловых портов, которые по умолчанию скрыты. Чтобы выставить термический портов, щелкните правой кнопкой мыши блок в вашей модели, а затем в контекстном меню выберите >>. Этот Действие отображает тепловые порты HA , HB , HC , HAr , HBr и HCr на пиктограмме блока и открывает Thermal Параметры порта .
Используйте термопорт для моделирования воздействия выделяемого тепла и машины. температура. Для получения дополнительной информации об использовании тепловых портов и о Thermal параметры, см. Моделирование тепловых эффектов в поворотных и поступательных приводах.
Переменные
Используйте настройки Переменные , чтобы указать приоритет и начальную цель значения для переменных блока перед симуляцией. Для получения дополнительной информации см. Установка приоритета и начальной цели для блочных переменных.
Тип переменные, которые видны в настройках Variables , зависят от метод инициализации, который вы выбираете в настройках Main для Опция инициализации параметр. Чтобы указать целевые значения, используя:
Переменные потока — Установите для параметра Опция инициализации значение
Задайте цели для переменных потока.Данные анализа потока-нагрузки — установка инициализации параметр от опции до
Установить целевые значения для потока нагрузки переменные.
Если вы выберете Задайте целевые значения для переменных потока нагрузки , чтобы полностью указать начальную
условие, вы должны включить ограничение инициализации в виде высокоприоритетной цели
ценить. Например, если ваша индукционная машина подключена к блоку инерции, начальное условие для индукционной машины будет
полностью указан, если в настройках Variables блока Inertia, Priority для Rotational
скорость установлена на High .В качестве альтернативы вы можете установить Priority — None для блока инерции Скорость вращения , и вместо этого установите Priority для блока индукционной машины Slip , Вырабатываемая реальная мощность или Потребляемая механическая мощность на Высокий .
Ссылки
[1] Kundur, P. Power Устойчивость системы и контроль. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993 г.
[2] Лышевский, С.Э. Электромеханические системы, электрические машины и прикладные Мехатроника. Бока Ратон, Флорида: CRC Press, 1999.
[3] Оджо, Дж. О., Консоли, А., и Липо, Т. А., «Усовершенствованная модель индукционных машин с насыщением», IEEE Transactions on Industry Applications . Vol. 26, вып. 2, стр. 212-221, 1990.
% PDF-1.7 % 80 0 объект > эндобдж xref 80 101 0000000016 00000 н. 0000002907 00000 н. 0000003113 00000 п. 0000004285 00000 н. 0000004321 00000 п. 0000004366 00000 н. 0000004411 00000 н. 0000004456 00000 н. 0000004501 00000 п. 0000004546 00000 н. 0000004591 00000 н. 0000004636 00000 н. 0000004681 00000 п. 0000004726 00000 н. 0000004839 00000 н. 0000005464 00000 н. 0000006114 00000 п. 0000006753 00000 н. 0000006868 00000 н. 0000007981 00000 н. 0000009302 00000 п. 0000009414 00000 п. 0000010702 00000 п. 0000011280 00000 п. 0000011379 00000 п. 0000011977 00000 п. 0000012643 00000 п. 0000014003 00000 п. 0000015385 00000 п. 0000018035 00000 п. 0000024338 00000 п. 0000024994 00000 п. 0000025041 00000 п. 0000025302 00000 п. 0000025561 00000 п. 0000025808 00000 п. 0000026065 00000 п. 0000026337 00000 п. 0000026599 00000 н. 0000026863 00000 п. 0000027124 00000 п. 0000027359 00000 н. 0000027390 00000 н. 0000027464 00000 н. 0000030732 00000 п. 0000031060 00000 п. 0000031126 00000 п. 0000031242 00000 п. 0000031273 00000 п. 0000031347 00000 п. 0000034330 00000 п. 0000034658 00000 п. 0000034724 00000 п. 0000034840 00000 п. 0000034871 00000 п. 0000034945 00000 п. 0000035276 00000 п. 0000035342 00000 п. 0000035458 00000 п. 0000035489 00000 п. 0000035563 00000 п. 0000035893 00000 п. 0000035959 00000 п. 0000036075 00000 п. 0000036106 00000 п. 0000036180 00000 п. 0000036510 00000 п. 0000036576 00000 п. 0000036692 00000 п. 0000036766 00000 п. 0000036891 00000 п. 0000037190 00000 п. 0000037264 00000 п. 0000037389 00000 п. 0000037681 00000 п. 0000037755 00000 п. 0000038050 00000 п. 0000038124 00000 п. 0000038418 00000 п. 0000038492 00000 п. 0000038787 00000 п. 0000038861 00000 п. 0000044210 00000 п. 0000081091 00000 п. 0000081458 00000 п. 0000081532 00000 п. 0000086881 00000 п. 0000111640 00000 н. 0000112007 00000 н. 0000113928 00000 н. 0000115430 00000 н. 0000116632 00000 н. 0000118676 00000 н. 0000120966 00000 н. 0000122377 00000 н. 0000124313 00000 н. 0000126083 00000 н. 0000126710 00000 н. 0000127688 00000 н. 0000204279 00000 н. 0000002316 00000 н. трейлер ] / Назад 868116 >> startxref 0 %% EOF 180 0 объект > поток hb«f`W Ā
Контактные кольца в асинхронном двигателе с фазным ротором
Контактные кольца в асинхронном двигателе с фазным ротором
Асинхронный двигатель, в котором контактные кольца имеют соединенные через них обмотки ротора, называется асинхронным двигателем с фазным ротором.Он имеет статор, аналогичный асинхронному двигателю с короткозамкнутым ротором, и ротор, состоящий из изолированных обмоток, выведенных через контактные кольца и щетки.
Ротор в контактном кольце двигателя имеет большее количество витков обмотки по сравнению с ротором с короткозамкнутым ротором, который обеспечивает большее наведенное напряжение и снижает ток. Их единственная цель — разместить сопротивление последовательно с обмотками ротора. Соединяя сопротивление последовательно, обмотка ротора существенно снижает LRC (ток заторможенного ротора) и увеличивает LRT (крутящий момент заторможенного ротора).Этот крутящий момент намного больше, чем тот, который дает пусковой крутящий момент без сопротивления двигателя.
Сопротивление имеет тенденцию к уменьшению крутящего момента, создаваемого первоначально на полной скорости, но сопротивление иссякает в момент запуска ротора. Единственными недостатками асинхронного двигателя с фазным ротором являются сложности и необходимость обслуживания щеток и узла контактного кольца по сравнению с асинхронным двигателем с короткозамкнутым ротором. Асинхронный двигатель с фазным ротором лучше всего подходит для пуска с высокими инерционными нагрузками.Высокое начальное сопротивление обеспечивает высокий крутящий момент отрыва даже при нулевой скорости. Для сравнения: двигатель с короткозамкнутым ротором выдает крутящий момент только на 80% синхронной скорости. Управление скоростью Если в цепь ротора подается переменное сопротивление, скорость асинхронного двигателя может измениться. Высокий начальный крутящий момент задается при нулевой скорости, в то время как крутящий момент с пониженной передачей не предоставляется на высокой скорости. Если сопротивление резисторов больше нуля, более высокое сопротивление еще больше снижает скорость.
Неправильное регулирование скорости из-за изменяющейся крутящей нагрузки. Практика управления скоростью эффективна только в диапазоне от 50 до 100 процентов от полной скорости, но хорошо работает с различными скоростными нагрузками, такими как лифты и даже печатные машины. Асинхронный двигатель с фазным ротором может также функционировать как генератор при работе на скорости, превышающей синхронную. Этот тип машины также можно назвать асинхронным двигателем с двойным питанием из-за соединения как статора, так и ротора.Поскольку скорость асинхронного двигателя с обмоткой можно проверить в диапазоне от 50 до 100 процентов с помощью добавления резистора к ротору, то же самое ожидается от асинхронного двигателя с двойным питанием. Асинхронный двигатель с фазным ротором может использоваться во многих формах привода с регулируемой скоростью.
Несколько типов частотно-регулируемых приводов помогают восстанавливать мощность частоты скольжения из цепи ротора и передавать ее источнику питания, обеспечивая широкий диапазон скоростей с высокой энергоэффективностью.Сегодня проверка скорости с помощью электродвигателя с токосъемником почти заменена асинхронными электродвигателями с частотно-регулируемыми приводами. Асинхронный двигатель с фазным ротором обладает некоторыми замечательными качествами. Он обеспечивает отличный крутящий момент для высоких инерционных нагрузок. Он требует низкого пускового тока по сравнению с асинхронными двигателями с короткозамкнутым ротором. Создаваемая скорость — это сопротивление, меняющееся от 50% до 100% полной скорости. По сравнению с двигателями с короткозамкнутым ротором он также требует более тщательного обслуживания щеток и контактных колец.
Другие:
Pri: поворотный электрический соединитель для решения дилеммы контактных колец для производителя оборудования для передачи данных Следующее введение в контактные кольца, используемые в медицине
Другое:
Преимущества высокочастотного контактного кольца
Знакомство с контактным кольцом HD и технологией виртуальной реальности
Высокочастотное контактное кольцо — идеальное современное контактное кольцо
Конструкция контактных колец турбины и его преимущества
Введение в контактные кольца, используемые в медицине
Контактные кольца в асинхронном двигателе с обмоткой ротора Поворотный электрический разъем
для решения дилеммы контактного кольца для оборудования передачи данных Производитель
Как запускается асинхронный двигатель с контактным кольцом?
Взаимозависимость контактного кольца и термопары
Сборка и применение контактного кольца ртутного типа