


Единицы измерения динамометрического ключа. В чем измеряется усилие динамометрического ключа?
Крутящий момент – это внутреннее усилие, которое возникает в объекте под действием прикладываемой на него нагрузки. Любое резьбовое соединение имеет определенный оптимальный крутящий момент, который зависит от материала, диаметра резьбы, размера и класса прочности крепежа. Для того, чтобы передать на соединение необходимый момент силы, используют специальный инструмент – динамометрический ключ.
Усилие может измеряться в разных единицах. Как правило, на шкале динамометрического ключа отображено несколько разных единиц измерения крутящего момента. Дабы избежать ошибки при работе и пересчета в нужную систему значений, перед покупкой и использованием инструмента необходимо убедиться, какие единицы усилия применяются на конкретной модели инструмента.
В чем измеряется усилие динамометрического ключа?
Основные единицы измерения усилия динамометрических ключей:
- Н/м или Ньютон на метр;
- Кг/м (кгс/м) или Килограмм на метр;
- Кг/см (кгс/cм) или Киллограм на сантиметр;
- lbf/ft (lb/ft) или Футофунты.
Таблица перевода усилий
| Кгс/м | Н/м | lbf/ft | Кгс/см | |
| 1 Кгс/м | 1 | 9.806 | 7.233 | 100 |
| 1 Н/м | 0.101 | 1 | 0.737 | |
| 1 lbf/ft | 0.138 | 1.355 | 1 | 3.825 |
| 1 Кгс/см | 0.01 | 0.098 | 0.072 | 1 |
Используя данную таблицу, можно с легкостью перевести единицы измерения динамометрического ключа в необходимую систему значений.
Готовая таблица перевода типовых значений
Единицы измерения динамометрического ключа на инструменте
На картинке представлен стрелочный динамометрический ключ, который имеет две системы измерения крутящего момент: Кгс/м и lbf/ft.
Здесь изображен предельный динамометрический ключ щелчкового типа, который имеет две шкалы с разных сторон инструмента в системах: Н/м и lbf/ft.
Электронный динамометрический ключ в большинстве случаев использует все основные системы измерения крутящего момента, делая инструмент не только самым точным в использовании, но и универсальным, способным работать в разных единицах. С помощью кнопок меню цифровой динамометрический ключ позволяет выбрать необходимую систему измерений.
Итог
Полезные материалы:
Физика. Понятия и определения.
Что такое сила?
Если тело ускоряется то на него что-то действует. А как найти это «что-то»? Например, что за силы действуют на тело вблизи поверхности земли? Это — сила тяжести, направленная вертикально вниз, пропорциональная массе тела и для высот, много меньших, чем радиус земли ${\large R}$, почти независящая от высоты; она равна
${\large F = \dfrac {G \cdot m \cdot M}{R^2} = m \cdot g }$
где
${\large g = \dfrac {G \cdot M}{R^2} }$
так называемое ускорение силы тяжести. В горизонтальном направлении тело будет двигаться с постоянной скоростью, однако движение в вертикальном направлении по второму закону Ньютона:
${\large m \cdot g = m \cdot \left ( \dfrac {d^2 \cdot x}{d \cdot t^2} \right ) }$
после сокращения ${\large m}$ получаем, что ускорение в направлении ${\large x}$ постоянно и равно ${\large g}$. Это хорошо известное движение свободно падающего тела, которое описывается уравнениями
${\large v_x = v_0 + g \cdot t}$
${\large x = x_0 + x_0 \cdot t + \dfrac {1}{2} \cdot g \cdot t^2}$
В чем сила измеряется?
Во всех учебниках и умных книжках, силу принято выражать в Ньютонах, но кроме как в моделях которыми оперируют физики ньютоны ни где не применяются. Это крайне неудобно.
Ньютон newton (Н) — производная единица измерения силы в Международной системе единиц (СИ).
Исходя из второго закона Ньютона, единица ньютон определяется как сила, изменяющая за одну секунду скорость тела массой один килограмм на 1 метр в секунду в направлении действия силы.
Таким образом, 1 Н = 1 кг·м/с².
Килограмм-сила (кгс или кГ) — гравитационная метрическая единица силы, равная силе, которая действует на тело массой один килограмм в гравитационном поле земли. Поэтому по определению килограмм-сила равна 9,80665 Н. Килограмм-сила удобна тем, что её величина равна весу тела массой в 1 кг.
1 кгс = 9,80665 ньютонов (примерно ≈ 10 Н)
1 Н ≈ 0,10197162 кгс ≈ 0,1 кгс
1 Н = 1 кг x 1м/с2.
Закон тяготения
Каждый объект Вселенной притягивается к любому другому объекту с силой, пропорциональной их массам и обратно пропорционально квадрату расстояния между ними.
${\large F = G \cdot \dfrac {m \cdot M}{R^2}}$
Добавить можно, что любое тело реагирует на приложенную к нему силу ускорением в направлении этой силы, по величине обратно пропорциональным массе тела.
${\large G}$ — гравитационная постоянная
${\large M}$ — масса земли
${\large R}$ — радиус земли
${\large G = 6,67 \cdot {10^{-11}} \left ( \dfrac {m^3}{kg \cdot {sec}^2} \right ) }$
${\large M = 5,97 \cdot {10^{24}} \left ( kg \right ) }$
${\large R = 6,37 \cdot {10^{6}} \left ( m \right ) }$
В рамках классической механики, гравитационное взаимодействие описывается законом всемирного тяготения Ньютона, согласно которому сила гравитационного притяжения между двумя телами массы ${\large m_1}$ и ${\large m_2}$, разделённых расстоянием ${\large R}$ есть
${\large F = -G \cdot \dfrac {m_1 \cdot m_2}{R^2}}$
Здесь ${\large G}$ — гравитационная постоянная, равная ${\large 6,673 \cdot {10^{-11}} m^3 / \left ( kg \cdot {sec}^2 \right ) }$. Знак минус означает, что сила, действующая на пробное тело, всегда направлена по радиус-вектору от пробного тела к источнику гравитационного поля, т.е. гравитационное взаимодействие приводит всегда к притяжению тел.
Поле тяжести потенциально. Это значит, что можно ввести потенциальную энергию гравитационного притяжения пары тел, и эта энергия не изменится после перемещения тел по замкнутому контуру. Потенциальность поля тяжести влечёт за собой закон сохранения суммы кинетической и потенциальной энергии, что при изучении движения тел в поле тяжести часто существенно упрощает решение.
В рамках ньютоновской механики гравитационное взаимодействие является дальнодействующим. Это означает, что как бы массивное тело ни двигалось, в любой точке пространства гравитационный потенциал и сила зависят только от положения тела в данный момент времени.
Тяжелее — Легче
Вес тела ${\large P}$ выражается произведением его массы ${\large m}$ на ускорение силы тяжести ${\large g}$.
${\large P = m \cdot g}$
Когда на земле тело становится легче (слабее давит на весы), это происходит от уменьшения массы. На луне все не так, уменьшение веса вызвано изменением другого множителя — ${\large g}$, так как ускорение силы тяжести на поверхности луны в шесть раз меньше чем на земле.
масса земли = ${\large 5,9736 \cdot {10^{24}}\ kg }$
масса луны = ${\large 7,3477 \cdot {10^{22}}\ kg }$
ускорение свободного падения на Земле = ${\large 9,81\ m / c^2 }$
ускорение свободного падения на Луне = ${\large 1,62 \ m / c^2 }$
В результате произведение ${\large m \cdot g }$, а следовательно и вес уменьшаются в 6 раз.
Но нельзя обозначить оба эти явления одним и тем же выражением «сделать легче». На луне тела становятся не легче, а лишь менее стремительно падают они «менее падучи»))).
Векторные и скалярные величины
Векторная величина (например сила, приложенная к телу), помимо значения (модуля), характеризуется также направлением. Скалярная же величина (например, длина) характеризуется только значением. Все классические законы механики сформулированы для векторных величин.
 |
|
Рисунок 1.
На рис. 1 изображены различные варианты расположения вектора ${ \large \overrightarrow{F}}$ и его проекции ${ \large F_x}$ и ${ \large F_y}$ на оси ${ \large X}$ и ${ \large Y}$ соответственно:
- A. величины ${ \large F_x}$ и ${ \large F_y}$ являются ненулевыми и положительными
- B. величины ${ \large F_x}$ и ${ \large F_y}$ являются ненулевыми, при этом ${\large F_y}$ — положительная величина, а ${\large F_x}$ — отрицательная, т.к. вектор ${\large \overrightarrow{F}}$ направлен в сторону, противоположную направлению оси ${\large X}$
- C. ${\large F_y}$ — положительная ненулевая величина, ${\large F_x}$ равна нулю, т.к. вектор ${\large \overrightarrow{F}}$ направлен перпендикулярно оси ${\large X}$
Момент силы
Моментом силы называют векторное произведение радиус-вектора, проведённого от оси вращения к точке приложения силы, на вектор этой силы. Т.е. согласно классическому определению момент силы — величина векторная. В рамках нашей задачи, это определение можно упростить до следующего: моментом силы ${\large \overrightarrow{F}}$, приложенной к точке с координатой ${\large x_F}$, относительно оси, расположенной в точке ${\large x_0}$ называется скалярная величина, равная произведению модуля силы ${\large \overrightarrow{F}}$, на плечо силы — ${\large \left | x_F — x_0 \right |}$. А знак этой скалярной величины зависит от направления силы: если она вращает объект по часовой стрелке, то знак плюс, если против — то минус.
Важно понимать, что ось мы можем выбирать произвольным образом — если тело не вращается, то сумма моментов сил относительно любой оси равна нулю. Второе важное замечание — если сила приложена к точке, через которую проходит ось, то момент этой силы относительно этой оси равен нулю (поскольку плечо силы будет равно нулю).

Проиллюстрируем вышесказанное примером, на рис.2. Предположим, что система, изображенная на рис. 2, находится в равновесии. Рассмотрим опору, на которой стоят грузы. На неё действуют 3 силы: ${\large \overrightarrow{N_1},\ \overrightarrow{N_2},\ \overrightarrow{N},}$ точки приложения этих сил А, В и С соответственно. На рисунке также присутствуют силы ${\large \overrightarrow{N_{1}^{gr}},\ \overrightarrow{N_2^{gr}}}$. Эти силы приложены к грузам, и согласно 3-му закону Ньютона
${\large \overrightarrow{N_{1}} = — \overrightarrow{N_{1}^{gr}}}$
${\large \overrightarrow{N_{2}} = — \overrightarrow{N_{2}^{gr}}}$
Теперь рассмотрим условие равенства моментов сил, действующих на опору, относительно оси, проходящей через точку А (и, как мы договаривались ранее, перпендикулярную плоскости рисунка):
${\large N \cdot l_1 — N_2 \cdot \left ( l_1 +l_2 \right ) = 0}$
Обратите внимание, что в уравнение не вошёл момент силы ${\large \overrightarrow{N_1}}$, поскольку плечо этой силы относительно рассматриваемой оси равно ${\large 0}$. Если же мы по каким-либо причинам хотим выбрать ось, проходящую через точку С, то условие равенства моментов сил будет выглядеть так:
${\large N_1 \cdot l_1 — N_2 \cdot l_2 = 0}$
Можно показать, что с математической точки зрения два последних уравнения эквивалентны.
Центр тяжести
Центром тяжести механической системы называется точка, относительно которой суммарный момент сил тяжести, действующих на систему, равен нулю.
Центр масс
Точка центра масс замечательна тем , что если на частицы образующие тело (неважно будет ли оно твердым или жидким, скоплением звезд или чем то другим) действует великое множество сил (имеются ввиду только внешние силы, поскольку все внутренние силы компенсируют друг друга), то результирующая сила приводит к такому ускорению этой точки, как будто в ней вся масса тела ${\large m}$.
Положение центра масс определяется уравнением:
${\large R_{c.m.} = \frac{\sum m_i\, r_i}{\sum m_i}}$
Это векторное уравнение, т.е. фактически три уравнения — по одному для каждого из трех направлений. Но рассмотрим только ${\large x}$ направление. Что означает следующее равенство?
${\large X_{c.m.} = \frac{\sum m_i\, x_i}{\sum m_i}}$
Предположим тело разделено на маленькие кусочки с одинаковой массой ${\large m}$, причем полная масса тела равна будет равна числу таких кусочков ${\large N}$, умноженному на массу одного кусочка, например 1 грамм. Тогда это уравнение означает, что нужно взять координаты ${\large x}$ всех кусочков, сложить их и результат разделить на число кусочков. Иными словами, если массы кусочков равны то ${\large X_{c.m.}}$ будет просто средним арифметическим ${\large x}$ координат всех кусочков.
 |
центр масс сложного тела лежит на линии, соединяющей центры масс двух составляющих его частей |
Масса и плотность
Масса — фундаментальная физическая величина. Масса характеризует сразу несколько свойств тела и сама по себе обладает рядом важных свойств.
- Масса служит мерой содержащегося в теле вещества.
- Масса является мерой инертности тела. Инертностью называется свойство тела сохранять свою скорость неизменной (в инерциальной системе отсчёта), когда внешние воздействия отсутствуют или компенсируют друг друга. При наличии внешних воздействий инертность тела проявляется в том, что его скорость меняется не мгновенно, а постепенно, и тем медленнее, чем больше инертность (т.е. масса) тела. Например, если бильярдный шар и автобус движутся с одинаковой скоростью и тормозятся одинаковым усилием, то для остановки шара требуется гораздо меньше времени, чем для остановки автобуса.
- Массы тел являются причиной их гравитационного притяжения друг к другу (см. раздел «Сила тяготения»).
- Масса тела равна сумме масс его частей. Это так называемая аддитивность массы. Аддитивность позволяет использовать для измерения массы эталон — 1 кг.
- Масса изолированной системы тел не меняется со временем (закон сохранения массы).
- Масса тела не зависит от скорости его движения. Масса не меняется при переходе от одной системы отсчёта к другой.
- Плотностью однородного тела называется отношение массы тела к его объёму:
${\large p = \dfrac {m}{V} }$
Плотность не зависит от геометрических свойств тела (формы, объёма) и является характеристикой вещества тела. Плотности различных веществ представлены в справочных таблицах. Желательно помнить плотность воды: 1000 кг/м3.
Второй и третий законы Ньютона
Взаимодействие тел можно описывать с помощью понятия силы. Сила — это векторная величина, являющаяся мерой воздействия одного тела на другое.
Будучи вектором, сила характеризуется модулем (абсолютной величиной) и направлением в пространстве. Кроме того, важна точка приложения силы: одна и та же по модулю и направлению сила, приложенная в разных точках тела, может оказывать различное воздействие. Так, если взяться за обод велосипедного колеса и потянуть по касательной к ободу, то колесо начнёт вращаться. Если же тянуть вдоль радиуса, никакого вращения не будет.
Второй закон Ньютона
Произведение массы тела на вектор ускорения есть равнодействующая всех сил, приложенных к телу:
${\large m \cdot \overrightarrow{a} = \overrightarrow{F} }$
Второй закон Ньютона связывает векторы ускорения и силы. Это означает, что справедливы следующие утверждения.
- ${\large m \cdot a = F}$, где ${\large a}$ — модуль ускорения, ${\large F}$ — модуль равнодействующей силы.
- Вектор ускорения имеет одинаковое направление с вектором равнодействующей силы, так как масса тела положительна.
Третий закон Ньютона
Два тела действуют друг на друга с силами, равными по модулю и противоположными по направлению. Эти силы имеют одну и ту же физическую природу и направлены вдоль прямой, соединяющей их точки приложения.
Принцип суперпозиции
Опыт показывает, что если на данное тело действуют несколько других тел, то соответствующие силы складываются как векторы. Более точно, справедлив принцип суперпозиции.
Принцип суперпозиции сил. Пусть на тело действуют силы ${\large \overrightarrow{F_1}, \overrightarrow{F_2},\ \ldots \overrightarrow{F_n}}$ Если заменить их одной силой ${\large \overrightarrow{F} = \overrightarrow{F_1} + \overrightarrow{F_2} \ldots + \overrightarrow{F_n}}$, то результат воздействия не изменится.
Сила ${\large \overrightarrow{F}}$ называется
Момент силы — Википедия
Момент силы, приложенный к гаечному ключу. Направлен от зрителя

Моме́нт си́лы (синонимы: кру́тящий момент, враща́тельный момент, вертя́щий момент, враща́ющий момент) — векторная физическая величина, равная векторному произведению радиус-вектора, проведённого от оси вращения к точке приложения силы и вектора этой силы. Характеризует вращательное действие силы на твёрдое тело.
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют в сопротивлении материалов).
В физике момент силы можно понимать как «вращающая сила». В Международной системе единиц (СИ) единицей измерения момента силы является ньютон-метр (Н·м). Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага. Например, сила в 3 ньютона, приложенная к рычагу на расстоянии 2 метра от его оси вращения, создаёт такой же момент, что и сила в 1 ньютон, приложенная к рычагу на расстоянии 6 метров от оси вращения. Более точно момент силы частицы определяется как векторное произведение:
- M→=[r→×F→],{\displaystyle {\vec {M}}=\left[{\vec {r}}\times {\vec {F}}\right],}
где F→{\displaystyle {\vec {F}}} — сила, действующая на частицу, а r→{\displaystyle {\vec {r}}} — радиус-вектор частицы (в предположении, что ось вращения проходит через начало координат).
Для того чтобы понять, откуда появилось обозначение момента сил и как к нему пришли, стоит рассмотреть действие силы на рычаг, поворачивающийся относительно неподвижной оси. Работа, совершаемая при действии силы F→{\displaystyle {\vec {F}}} на рычаг r→{\displaystyle {\vec {r}}}, совершающий вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
Пусть под действием этой силы конец рычага смещается на бесконечно малый отрезок dl{\displaystyle dl}, которому соответствует бесконечно малый угол dφ{\displaystyle d\varphi }. Обозначим через d→l{\displaystyle {\vec {d}}l} вектор, который направлен вдоль бесконечно малого отрезка dl{\displaystyle dl} и равен ему по модулю. Угол между вектором силы F→{\displaystyle {\vec {F}}} и вектором d→l{\displaystyle {\vec {d}}l} равен β{\displaystyle \beta }, а угол между векторами r→{\displaystyle {\vec {r}}} и F→{\displaystyle {\vec {F}}} — α{\displaystyle \alpha }.
Следовательно, бесконечно малая работа dA{\displaystyle dA}, совершаемая силой F→{\displaystyle {\vec {F}}} на бесконечно малом участке dl{\displaystyle dl}, равна скалярному произведению вектора d→l{\displaystyle {\vec {d}}l} и вектора силы, то есть dA=F→⋅d→l{\displaystyle dA={\vec {F}}\cdot {\vec {d}}l}.
Теперь попытаемся выразить модуль вектора d→l{\displaystyle {\vec {d}}l} через радиус-вектор r→{\displaystyle {\vec {r}}}, а проекцию вектора силы F→{\displaystyle {\vec {F}}} на вектор d→l{\displaystyle {\vec {d}}l} — через угол α{\displaystyle \alpha }.
Так как для бесконечно малого перемещения рычага dl{\displaystyle dl} можно считать, что траектория перемещения перпендикулярна рычагу r→{\displaystyle {\vec {r}}}, используя соотношения для прямоугольного треугольника, можно записать следующее равенство: dl=rtgdφ{\displaystyle dl=r\mathrm {tg} \,d\varphi }, где в случае малого угла справедливо tgdφ=dφ{\displaystyle \mathrm {tg} \,d\varphi =d\varphi } и, следовательно, |dl→|=|r→|dφ{\displaystyle \left|{\vec {dl}}\right|=\left|{\vec {r}}\right|d\varphi }.
Для проекции вектора силы F→{\displaystyle {\vec {F}}} на вектор d→l{\displaystyle {\vec {d}}l} видно, что угол β=π2−α{\displaystyle \beta ={\frac {\pi }{2}}-\alpha }, а так как cos(π2−α)=sinα{\displaystyle \cos {\left({\frac {\pi }{2}}-\alpha \right)}=\sin \alpha }, получаем, что |F→|cosβ=|F→|sinα{\displaystyle \left|{\vec {F}}\right|\cos \beta =\left|{\vec {F}}\right|\sin \alpha }.
Теперь запишем бесконечно малую работу через новые равенства: dA=|r→|dφ|F→|sinα{\displaystyle dA=\left|{\vec {r}}\right|d\varphi \left|{\vec {F}}\right|\sin \alpha }, или dA=|r→||F→|sin(α)dφ{\displaystyle dA=\left|{\vec {r}}\right|\left|{\vec {F}}\right|\sin(\alpha )d\varphi }.
Теперь видно, что произведение |r→||F→|sinα{\displaystyle \left|{\vec {r}}\right|\left|{\vec {F}}\right|\sin \alpha } есть не что иное, как модуль векторного произведения векторов r→{\displaystyle {\vec {r}}} и F→{\displaystyle {\vec {F}}}, то есть |r→×F→|{\displaystyle \left|{\vec {r}}\times {\vec {F}}\right|}, которое и было принято обозначить за момент силы M{\displaystyle M}, или модуль вектора момента силы |M→|{\displaystyle \left|{\vec {M}}\right|}.
Теперь полная работа записывается просто: A=∫0φ|r→×F→|dφ{\displaystyle A=\int \limits _{0}^{\varphi }\left|{\vec {r}}\times {\vec {F}}\right|d\varphi }, или A=∫0φ|M→|dφ{\displaystyle A=\int \limits _{0}^{\varphi }\left|{\vec {M}}\right|d\varphi }.
Момент силы имеет размерность «сила, умноженная на расстояние» и единицу измерения ньютон-метр в системе СИ. 1 Н·м — это момент, который производит сила 1 Н на рычаг длиной 1 м, приложенная к концу рычага и направленная перпендикулярно ему.
Энергия и механическая работа также имеют размерность «сила, умноженная на расстояние» и измеряются в системе СИ в джоулях. Следует заметить, что энергия — это скалярная величина, тогда как момент силы — величина псевдовекторная. Совпадение размерностей этих величин не случайность: момент силы 1 Н·м, при повороте рычага или вала на 1 радиан совершает работу в 1 Дж, а при повороте на один оборот совершает механическую работу и сообщает энергию 2π{\displaystyle 2\pi } джоуля. Математически:
- E=Mθ,{\displaystyle E=M\theta ,}
где E{\displaystyle E} — энергия, M{\displaystyle M} — вращающий момент, θ{\displaystyle \theta } — угол в радианах.
Формула момента рычага[править | править код]
 Момент, действующий на рычаг
Момент, действующий на рычагОчень интересен особый случай, представляемый как определение момента силы в поле:
- |M→|=|M→1||F→|,{\displaystyle \left|{\vec {M}}\right|=\left|{\vec {M}}_{1}\right|\left|{\vec {F}}\right|,}
где: |M→1|{\displaystyle \left|{\vec {M}}_{1}\right|} — момент рычага, |F→|{\displaystyle \left|{\vec {F}}\right|} — величина действующей силы.
Недостаток такого представления в том, что оно не дает направления момента силы, а только его величину. Если сила перпендикулярна вектору r→{\displaystyle {\vec {r}}}, момент рычага будет равен расстоянию от центра до точки приложения силы и момент силы будет максимален:
- |T→|=|r→||F→|.{\displaystyle \left|{\vec {T}}\right|=\left|{\vec {r}}\right|\left|{\vec {F}}\right|.}
Сила под углом[править | править код]
Если сила F→{\displaystyle {\vec {F}}} направлена под углом θ{\displaystyle \theta } к рычагу r, то M=rFsinθ{\displaystyle M=rF\sin \theta }.
Статическое равновесие[править | править код]
Для того чтобы объект находился в равновесии, должна равняться нулю не только сумма всех сил, но и сумма всех моментов силы вокруг любой точки. Для двумерного случая с горизонтальными и вертикальными силами: сумма сил в двух измерениях ΣH=0,ΣV=0{\displaystyle \Sigma H=0,\,\Sigma V=0} и момент силы в третьем измерении ΣM=0{\displaystyle \Sigma M=0}.
Момент силы как функция от времени[править | править код]
Момент силы — производная по времени от момента импульса,
Видеоурок: вращающий момент- M→=dL→dt,{\displaystyle {\vec {M}}={\frac {d{\vec {L}}}{dt}},}
где L→{\displaystyle {\vec {L}}} — момент импульса.
Возьмём твердое тело. Движение твёрдого тела можно представить как движение конкретной точки и вращения вокруг неё.
Момент импульса относительно точки O твёрдого тела может быть описан через произведение момента инерции и угловой скорости относительно центра масс и линейного движения центра масс.
- Lo→=Icω→+[M(ro→−rc→),vc→].{\displaystyle {\vec {L_{o}}}=I_{c}\,{\vec {\omega }}+[M({\vec {r_{o}}}-{\vec {r_{c}}}),{\vec {v_{c}}}].}
Будем рассматривать вращающиеся движения в системе координат Кёнига, так как описывать движение твёрдого тела в мировой системе координат гораздо сложнее.
Продифференцируем это выражение по времени. И если I{\displaystyle I} — постоянная величина во времени, то
- M→=Idω→dt=Iα→,{\displaystyle {\vec {M}}=I{\frac {d{\vec {\omega }}}{dt}}=I{\vec {\alpha }},}
где α→{\displaystyle {\vec {\alpha }}} — угловое ускорение, измеряемое в радианах в секунду за секунду (рад/с2). Пример: вращается однородный диск.
Если тензор инерции меняется со временем, то движение относительно центра масс описывается с помощью динамического уравнения Эйлера:
- Mc→=Icdω→dt+[w→,Icw→].{\displaystyle {\vec {M_{c}}}=I_{c}{\frac {d{\vec {\omega }}}{dt}}+[{\vec {w}},I_{c}{\vec {w}}].}
Отношение между моментом силы и мощностью[править | править код]
Если сила совершает действие на каком-либо расстоянии, то она совершает механическую работу. Так же и момент силы, если совершает действие через угловое расстояние, он совершает работу.
- P=M→⋅ω→.{\displaystyle P={\vec {M}}\cdot {\vec {\omega }}.}
В системе СИ мощность P{\displaystyle P} измеряется в ваттах, момент силы — в ньютоно-метрах, а угловая скорость — в радианах в секунду.
Отношение между моментом силы и работой[править | править код]
- A=∫θ1θ2|M→|dθ.{\displaystyle A=\int _{\theta _{1}}^{\theta _{2}}\left|{\vec {M}}\right|\mathrm {d} \theta .}
В случае постоянного момента получаем:
- A=|M→|θ.{\displaystyle A=\left|{\vec {M}}\right|\theta .}
В системе СИ работа A{\displaystyle A} измеряется в джоулях, момент силы — в ньютоно-метрах, а угол — в радианах.
Обычно известна угловая скорость ω{\displaystyle \omega } в радианах в секунду и время действия момента t{\displaystyle t}.
Тогда совершённая моментом силы работа рассчитывается как:
- A=|M→|ωt.{\displaystyle A=\left|{\vec {M}}\right|\omega t.}
Если имеется материальная точка OF{\displaystyle O_{F}}, к которой приложена сила F→{\displaystyle {\vec {F}}}, то момент силы относительно точки O{\displaystyle O} равен векторному произведению радиус-вектора r→{\displaystyle {\vec {r}}}, соединяющего точки O{\displaystyle O} и OF{\displaystyle O_{F}}, на вектор силы F→{\displaystyle {\vec {F}}}:
- MO→=[r→×F→].{\displaystyle {\vec {M_{O}}}=\left[{\vec {r}}\times {\vec {F}}\right].}
Момент силы относительно оси равен алгебраическому значению проекции момента этой силы на плоскость, перпендикулярную этой оси относительно точки пересечения оси с плоскостью, то есть
- Mz(F)=Mo(F′)=F′h′.{\displaystyle M_{z}(F)=M_{o}(F’)=F’h’.}
Измерение момента силы осуществляется с помощью специальных приборов — торсиометров. Принцип их действия обычно основан на измерении угла закручивания упругого вала, передающего крутящий момент, либо на измерении деформации некоторого упругого рычага. Измерения деформации и угла закручивания производится различными датчиками деформации — тензометрическими, магнитоупругими, а также измерителями малых перемещений — оптическими, ёмкостными, индуктивными, ультразвуковыми, механическими.
Существуют специальные динамометрические ключи для измерения крутящего момента затягивания резьбовых соединений и регулируемые и нерегулируемые ограничители крутящего момента, так называемые «трещотки», применяемые в гаечных ключах, шуруповёртах, винтовых микрометрах и др.
Сила упругости — Википедия
Материал из Википедии — свободной энциклопедии
Си́ла упру́гости — сила, возникающая в теле в результате его деформации и стремящаяся вернуть его в исходное (начальное) состояние.
В случае упругих деформаций энергия деформации является потенциальной. Сила упругости имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. В простейшем случае растяжения/сжатия тела сила упругости направлена противоположно смещению частиц тела, перпендикулярно поверхности.
Вектор силы противоположен направлению деформации тела (смещению его молекул). Если исчезает деформация тела, то исчезает и сила упругости.
В Международной системе единиц (СИ) сила упругости так же, как и все другие силы, измеряется в ньютонах (русское обозначение: Н; международное: N).
В простейшем случае одномерных малых упругих деформаций формула для силы упругости имеет вид:
- F=kΔl{\displaystyle F=k\Delta l},
где k{\displaystyle \ k} — жёсткость тела (коэффициент упругости), Δl{\displaystyle \ \Delta l} — удлинение (величина деформации).
Жёсткость тела зависит от его формы и размеров, а также от материала, из которого оно изготовлено.
В словесной формулировке закон Гука звучит следующим образом:
Сила упругости, возникающая при деформации тела, прямо пропорциональна удлинению и направлена противоположно направлению перемещения частиц тела относительно других частиц при деформации.
При увеличении величины деформации, закон Гука перестаёт действовать, сила упругости начинает сложным образом зависеть от величины растяжения или сжатия.
Сила тяжести — Википедия
 Cила тяжести mg складывается из гравитационного притяжения планеты GMm/r2 и центробежной силы инерции mω2a.
Cила тяжести mg складывается из гравитационного притяжения планеты GMm/r2 и центробежной силы инерции mω2a.Си́ла тя́жести — сила, действующая на любое физическое тело, находящееся вблизи поверхности Земли или другого астрономического тела.
По определению, сила тяжести на поверхности планеты складывается из гравитационного притяжения планеты и центробежной силы инерции, вызванной суточным вращением планеты[1][2].
Остальные силы (например, притяжение Луны и Солнца) ввиду их малости не учитывают или изучают отдельно как временные изменения гравитационного поля Земли[3][4][5].
Сила тяжести сообщает всем телам, независимо от их массы, одно и то же ускорение[6] и является консервативной силой[7].
Сила тяжести P→{\displaystyle {\vec {P}}}, действующая на материальную точку массой m{\displaystyle m}, вычисляется по формуле[6]: P→=mg→{\displaystyle {\vec {P}}=m{\vec {g}}}, где g→{\displaystyle {\vec {g}}} — ускорение, сообщаемое телу силой тяжести, которое называется ускорением свободного падения[8].
Если в пределах протяжённого тела поле сил тяжести однородно, то равнодействующая сил тяжести, действующих на элементы этого тела, приложена к центру масс тела[9].
На тела, движущиеся относительно поверхности Земли, кроме силы тяжести, также действует сила Кориолиса[10][11][12].
Аристотель объяснял силу тяжести движением тяжёлых физических стихий (земля, вода) к своему естественному месту (центру Вселенной внутри Земли), причём скорость тем больше, чем ближе тяжёлое тело к нему[13].
Архимед рассмотрел вопрос о центре тяжести параллелограмма, треугольника, трапеции и параболического сегмента. В сочинении «О плавающих телах» Архимед доказал закон гидростатики, носящий его имя[13].
Иордан Неморарий в сочинении «О тяжестях» при рассмотрении грузов на наклонной плоскости разлагал их силы тяжести на нормальную и параллельную наклонной плоскости составляющие, был близок к определению статического момента[14].
Стевин экспериментально определил, что тела разных масс падают с одинаковым ускорением, установил теоремы о давлении жидкости в сосудах (давление зависит только от глубины и не зависит от величины, формы и объёма сосуда) и о равновесии грузов на наклонной плоскости (на наклонных плоскостях равной высоты силы, действующие со стороны уравновешивающихся грузов вдоль наклонных плоскостей, обратно пропорциональны длинам этих плоскостей). Доказал теорему, согласно которой в случае равновесия центр тяжести однородного плавающего тела должен находиться выше центра тяжести вытесненной жидкости[15].
Галилей экспериментально исследовал законы падения тел (ускорение не зависит от веса тела), колебаний маятников (период колебаний не зависит от веса маятника) и движения по наклонной плоскости[16].
Гюйгенс создал классическую теорию движения маятника, оказавшую значительное влияние на теорию тяготения[16].
Декарт разработал кинетическую теорию тяготения, объяснявшую силу тяжести взаимодействием тел с небесным флюидом, выдвинул гипотезу о зависимости силы тяжести от расстояния между тяжёлым телом и центром Земли[16].
Ньютон из равенства ускорений падающих тел и второго закона Ньютона сделал вывод о пропорциональности силы тяжести массам тел и установил, что сила тяжести является одним из проявлений силы всемирного тяготения[17][18]. Для проверки этой идеи он сравнил ускорение свободного падения тел у поверхности Земли с ускорением Луны на орбите, по которой она движется относительно Земли.[19]
Эйнштейн объяснил факт равенства ускорений падающих тел независимо от их массы (эквивалентность инертной и тяжёлой массы) как следствие принципа эквивалентности равномерно ускоренной системы отсчёта и системы отсчёта, находящейся в гравитационном поле[20].
В соответствии с законом всемирного тяготения, сила гравитационного притяжения, действующая на материальную точку массой m{\displaystyle m} на поверхности сферически симметричного астрономического тела, имеющего массу M{\displaystyle M}, определяется соотношением:
- F=G⋅M⋅mR2,{\displaystyle F=G\cdot {M\cdot m \over R^{2}},}
где G{\displaystyle G} — гравитационная постоянная, равная 6,67384(80)·10−11м3·с−2·кг−1, а R{\displaystyle R} — радиус тела. Данное соотношение справедливо в предположении, что распределение массы по объёму тела сферически симметрично. В этом случае сила гравитационного притяжения направлена к центру тела.
Модуль центробежной силы инерции Q{\displaystyle Q}, действующей на материальную частицу, выражается формулой:
- Q=maω2,{\displaystyle Q=ma\omega ^{2},}
где a{\displaystyle a} — расстояние между частицей и осью вращения рассматриваемого астрономического тела, а ω{\displaystyle \omega } — угловая скорость его вращения. Центробежная сила инерции перпендикулярна оси вращения и направлена в сторону от неё.
Поправки, вносимые общей теорией относительности в закон всемирного тяготения Ньютона, в условиях Земли и других планет крайне малы (модуль гравитационного потенциала на поверхности Земли, равный половине квадрата второй космической скорости vII{\displaystyle v_{II}}, крайне мал по сравнению с квадратом скорости света c{\displaystyle c}: vII22c2∼10−10{\displaystyle {\frac {v_{II}^{2}}{2c^{2}}}\sim 10^{-10}})[21].
Форма Земли (геоид) отличается от шарообразной и близка к сплюснутому эллипсоиду. В этом случае сила гравитационного притяжения, действующая на материальную точку массой m{\displaystyle m}, определяется более сложным выражением, чем ранее:
F→=Gm∫MdMR2R→R.{\displaystyle {\vec {F}}=Gm\int \limits _{M}{{dM} \over {R^{2}}}{{\vec {R}} \over R}.}
Здесь dM{\displaystyle dM} — элемент массы Земли, R→=r→−r→′,{\displaystyle {\vec {R}}={\vec {r}}-{\vec {r}}’,} а r→{\displaystyle {\vec {r}}} и r→′{\displaystyle {{\vec {r}}’}} — радиус-векторы точки измерения и элемента Земли соответственно. Интегрирование при этом выполняется по всей массе Земли.
В векторной форме выражение для центробежной силы инерции можно записать в виде
- Q→=mω2R→0,{\displaystyle {\vec {Q}}=m\omega ^{2}{{\vec {R}}_{0}},}
где R→0{\displaystyle {{\vec {R}}_{0}}} — вектор, перпендикулярный оси вращения и проведённый от неё к данной материальной точке, находящейся вблизи поверхности Земли.
При этом сила тяжести P→{\displaystyle {\vec {P}}}, как и раньше, равна сумме F→{\displaystyle {\vec {F}}} и Q→{\displaystyle {\vec {Q}}}:
- P→=F→+Q→.{\displaystyle {\vec {P}}={\vec {F}}+{\vec {Q}}.}
Сила тяжести, действующая вблизи поверхности Земли, зависит от широты места φ{\displaystyle \varphi } и высоты его H{\displaystyle H} над уровнем моря. Приблизительное выражение для абсолютной величины силы тяжести в системе СИ имеет вид[8]:
- P=9,780318(1+0,005302sinφ−0,000006sin22φ)m−0,000003086Hm.{\displaystyle P=9{,}780318(1+0{,}005302\sin \varphi -0{,}000006\sin ^{2}2\varphi )m-0{,}000003086Hm.}
Угол α{\displaystyle \alpha } между силой тяжести P→{\displaystyle {\vec {P}}} и силой гравитационного притяжения к Земле F→{\displaystyle {\vec {F}}} равен[22]:
- α≈0,0018sin2φ{\displaystyle \alpha \approx 0{,}0018\sin {2\varphi }}.
Он изменяется в пределах от нуля (на экваторе, где φ=0∘{\displaystyle \varphi =0^{\circ }} и на полюсах, где φ=90∘{\displaystyle \varphi =90^{\circ }}) до 0,0018{\displaystyle 0{,}0018} рад или 6′{\displaystyle 6′} (на широте 45∘{\displaystyle 45^{\circ }}).
Движение тел под действием силы тяжести[править | править код]
В том случае, когда модуль перемещения тела много меньше расстояния до центра Земли, то можно считать силу тяжести постоянной, а движение тела равноускоренным. Если начальная скорость тела отлична от нуля и её вектор направлен не по вертикали, то под действием силы тяжести тело движется по параболической траектории.
При бросании тела с некоторой высоты параллельно поверхности Земли дальность полёта увеличивается с ростом начальной скорости. При больших значениях начальной скорости для вычисления траектории тела необходимо учитывать шарообразную форму Земли и изменение направления силы тяжести в разных точках траектории.
При некотором значении скорости, называемом первой космической скоростью, тело, брошенное по касательной к поверхности Земли, под действием силы тяжести при отсутствии сопротивления со стороны атмосферы может двигаться вокруг Земли по окружности, не падая на Землю. При скорости, превышающую вторую космическую скорость, тело уходит от поверхности Земли в бесконечность по гиперболической траектории. При скоростях, промежуточных между первой и второй космическими, тело движется вокруг Земли по эллиптической траектории[23].
Потенциальная энергия поднятого над Землей тела[править | править код]
Потенциальной энергией поднятого над Землей тела называется взятая с обратным знаком работа силы тяжести, совершаемая при перемещении тела с поверхности Земли в это положение. Она равна Ep=γMm(1Rz−1R){\displaystyle E_{p}=\gamma Mm({\frac {1}{R_{z}}}-{\frac {1}{R}})}, где γ{\displaystyle \gamma } — гравитационная постоянная, M{\displaystyle M} — масса земли, m{\displaystyle m} — масса тела, Rz{\displaystyle R_{z}} — радиус Земли, R{\displaystyle R} — расстояние до центра Земли тела.
При удалении тела не небольшие по сравнению с радиусом Земли расстояния от поверхности Земли поле тяготения можно считать однородным, то есть ускорение свободного падения постоянно. В этом случае при подъеме тела массой m{\displaystyle m} на высоту h{\displaystyle h} от поверхности Земли сила тяжести совершает работу A=−mgh{\displaystyle A=-mgh}. Поэтому потенциальная энергия тела: Ep=mgh{\displaystyle E_{p}=mgh}. Потенциальная энергия тела может иметь как положительные, так и отрицательные значения. Тело, находящееся на глубине h{\displaystyle h} от поверхности Земли обладает отрицательным значением потенциальной энергии Ep=−mgh{\displaystyle E_{p}=-mgh}[24].
При испарении воды с поверхности Земли солнечная радиация трансформируется в потенциальную энергию водяного пара в атмосфере. Затем при выпадении атмосферных осадков на сушу она переходит при стоке в кинетическую энергию и совершает эрозионную работу в процессе переноса денудационного материала всей суши и делает возможным жизнь органического мира на Земле[25].
Потенциальная энергия перемещаемых тектоническими процессами масс горных пород в основном тратится на перемещение продуктов разрушения горных пород с повышенных участков поверхности на нижерасположенные[26].
Сила тяжести играет важную роль в процессах эволюции звёзд. Для звёзд, находящихся на этапе главной последовательности своей эволюции, сила тяжести является одним из важных факторов, обеспечивающих условия, необходимые для термоядерного синтеза. На заключительных этапах эволюции звёзд, в процессе их коллапса, благодаря силе тяжести, не скомпенсированной силами внутреннего давления, звёзды превращаются в нейтронные звёзды или чёрные дыры.
Сила тяжести очень важна для формирования структуры внутреннего строения Земли и других планет и тектонической эволюции её поверхности[27]. Чем больше сила тяжести, тем большая масса метеоритного материала выпадает на единицу её поверхности[28]. За время существования Земли её масса существенно увеличилась благодаря силе тяжести: ежегодно на Землю оседает 30-40 млн. тонн метеоритного вещества, в основном в виде пыли, что значительно превышает рассеяние лёгких компонентов верхней атмосферы Земли в космосе[29].
Без потенциальной энергии силы тяжести, непрерывно переходящей в кинетическую, круговорот вещества и энергии на Земле был бы невозможен[30].
Сила тяжести играет очень важную роль для жизни на Земле[31]. Только благодаря ей у Земли есть атмосфера. Вследствие силы тяжести, действующей на воздух, существует атмосферное давление[32].
У всех живых организмов с нервной системой есть рецепторы, определяющие величину и направление силы тяжести и служащие для ориентировки в пространстве. У позвоночных организмов, в том числе человека, величину и направление силы тяжести определяет вестибулярный аппарат[33].
Наличие силы тяжести привело к возникновению у всех многоклеточных наземных организмов прочных скелетов, необходимых для её преодоления. У водных живых организмов силу тяжести уравновешивает гидростатическая сила[34].
Роль силы тяжести в процессах жизнедеятельности организмов изучает гравитационная биология[35].
Сила тяжести и принцип эквивалентности инертной и гравитационной массы используются для определения масс предметов путём их взвешивания на весах. Сила тяжести используется при отстойной сепарации газовых и жидких смесей, в некоторых типах часов, в отвесах и противовесах, машине Атвуда, машине Обербека и жидкостных барометрах. Сила тяжести используется на железнодорожном транспорте для скатывания вагонов с уклона на сортировочных горках, на заводах строительных изделий для транспортировки материалов в спускных лотках и спускных трубах.[36]
Точные измерения силы тяжести и её градиента (гравиметрия) используются при исследовании внутреннего строения Земли и при гравиразведке различных полезных ископаемых[37].
Устойчивость тела в поле силы тяжести[править | править код]
Для тела в поле силы тяжести, опирающегося на одну точку (например при подвешивании тела за одну точку или помещении шара на плоскость) для устойчивого равновесия необходимо, что бы центр тяжести тела занимал наинизшее положение по сравнению со всеми возможными соседними положениями[38].
Для тела в поле силы тяжести, опирающегося на несколько точек (например, стол) или на целую площадку (например, ящик на горизонтальной плоскости) для устойчивого равновесия необходимо, чтобы вертикаль, проведённая через центр тяжести, проходила внутри площади опоры тела. Площадью опоры тела называется контур, соединяющий точки опоры или внутри площадки, на которое опирается тело[38].
Основной источник: [39]Силу тяжести измеряют динамическими и статическими методами. Динамические методы используют наблюдение за движением тела под действием силы тяжести и измеряют время перехода тела из одного заранее определённого положения в другое. Они используют: колебания маятника, свободное падение тела, колебания струны с грузом. Статические методы используют наблюдение за изменением положения равновесия тела под действием силы тяжести и некоторой уравновешивающей её силы и измеряют линейное или угловое смещение тела.
Измерения силы тяжести бывают абсолютными и относительными. Абсолютные измерения определяют полное значение силы тяжести в заданной точке. Относительные измерения определяют разность силы тяжести в заданной точке и некоторого другого, заранее известного значения. Приборы, предназначенные для относительных измерений силы тяжести, называются гравиметрами.
Динамические методы определения силы тяжести могут быть как относительными, так и абсолютными, статические — только относительными.
| Земля | 1,00 | Солнце | 27,85 |
| Луна | 0,165 | Меркурий | 0,375—0,381 |
| Венера | 0,906 | Марс | 0,394 |
| Юпитер | 2,442 | Сатурн | 1,065 |
| Уран | 0,903 | Нептун | 1,131 |
- ↑ Сивухин Д. В. Общий курс физики. — М.: Физматлит, 2005. — Т. I. Механика. — С. 372. — 560 с. — ISBN 5-9221-0225-7.
- ↑ Тарг С. М. Сила тяжести // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Большая Российская энциклопедия, 1994. — Т. 4. — С. 496. — 704 с. — 40 000 экз. — ISBN 5-85270-087-8.
- ↑ Миронов, 1980, с. 49.
- ↑ Максимальное изменение силы тяжести, обусловленное притяжением Луны, составляет примерно 0,25⋅10−5{\displaystyle 0{,}25\cdot 10^{-5}} м/с2, Солнца 0,1⋅10−5{\displaystyle 0{,}1\cdot 10^{-5}} м/с2
- ↑ Миронов, 1980, с. 71.
- ↑ 1 2 Савельев, 1987, с. 70.
- ↑ Савельев, 1987, с. 82-83.
- ↑ 1 2 Ускорение свободного падения // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Большая Российская энциклопедия, 1998. — Т. 5. — С. 245—246. — 760 с. — ISBN 5-85270-101-7.
- ↑ Савельев, 1987, с. 156.
- ↑ Тарасов, 2012, с. 200, 270.
- ↑ Савельев, 1987, с. 128.
- ↑ Бутенин, 1971, с. 253-259.
- ↑ 1 2 Зубов В. П. Физические идеи древности // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 38, 54-55;
- ↑ Зубов В. П. Физические идеи средневековья // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 114;
- ↑ Зубов В. П. Физические идеи ренессанса // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 151;
- ↑ 1 2 3 Кузнецов Б. Г. Генезис механического объяснения физических явлений и идеи картезианской физики // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 160-161, 169-170, 177;
- ↑ Ньютон, 1989, с. 7.
- ↑ Кузнецов Б. Г. Основные принципы физики Ньютона // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 189-191;
- ↑ Сивухин Д. В. Общий курс физики. Механика. — М., Наука, 1979. — Тираж 50 000 экз. — с. 323
- ↑ Иваненко Д. Д. Основные идеи общей теории относительности // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 300;
- ↑ Грищук Л. П., Зельдович Я. Б. Тяготение // Физика космоса. Маленькая энциклопедия. — М., Советская энциклопедия, 1986. — С. 676
- ↑ Савельев, 1987, с. 122.
- ↑ Жирнов Н. И. Классическая механика. — М., Просвещение, 1980. — Тираж 28000 экз. — с. 121
- ↑ Кабардин О.Ф., Орлов В.А., Пономарева А.В. Факультативный курс физики. 8 класс. — М.: Просвещение, 1985. — Тираж 143 500 экз. — С. 151 — 152
- ↑ Криволуцкий, 1985, с. 307.
- ↑ Криволуцкий, 1985, с. 70, 234.
- ↑ Криволуцкий, 1985, с. 208.
- ↑ Криволуцкий, 1985, с. 77.
- ↑ Криволуцкий, 1985, с. 48, 237-238.
- ↑ Криволуцкий, 1985, с. 289.
- ↑ Зельманов А. Л. Многообразие материального мира и проблема бесконечности Вселенной // Бесконечность и Вселенная. — М., Мысль, 1969. — Тираж 12000 экз. — С. 283
- ↑ Хромов С. П., Петросянц М. А. Метеорология и климатология. — М., МГУ, 2006. — ISBN 5-211-05207-2. — C. 67
- ↑ Юрий Фролов. https://www.nkj.ru/archive/articles/21172/ Наш гравитационный компас] // Наука и жизнь. — 2012. — № 10.
- ↑ П. Кемп, К. Армс Введение в биологию. — М.: Мир, 1988. — ISBN 5-03-001286-9. — Тираж 125000 экз. — С. 75
- ↑ Лозовская Е. Жизнь с гравитацией и без нее // Наука и жизнь. — 2004. — № 9.
- ↑ Фиделев А. С. Подъемно-транспортные машины и механизмы. — Киев, Будивельник, 1967. — 187-188
- ↑ Миронов, 1980, с. 1-543.
- ↑ 1 2 Ландсберг Г. С. Элементарный учебник физики. Том 1. Механика, теплота, молекулярная физика. — М., Наука, 1975. — Тираж 350 000 экз. — С. 189-190
- ↑ Миронов, 1980, с. 94-262.
- ↑ У газовых гигантов «поверхность» понимается как область высот в атмосфере, где давление равно атмосферному давлению на Земле на уровне моря (1,013×105Па).
- ↑ Данные взяты из статьи Википедии Ускорение свободного падения
- Ньютон И. Математические начала натуральной философии. — М.: Наука, 1989. — 688 с. — ISBN 5-02-000747-1.
- Савельев И. В. Курс общей физики. Т. 1. Механика. Молекулярная физика. — М.: Наука, 1987. — 688 с.
- Криволуцкий А. Е. Голубая планета. Земля среди планет. Географический аспект.. — М.: Мысль, 1985. — 335 с.
- Миронов В. С. Курс гравиразведки. — Л.: Недра, 1980. — 543 с.
- Тарасов В. Н., Бояркина И. В., Коваленко М. В., Федорченко Н. П., Фисенко Н. И. Теоретическая механика. — М.: ТрансЛит, 2012. — 560 с.
- Бутенин Н. В. Введение в аналитическую механику. — М.: Наука, 1971. — 264 с. — 25 000 экз.
Вес — Википедия

Вес — сила, с которой тело действует на опору (или подвес, или другой вид крепления), препятствующую падению, возникающая в поле сил тяжести[1][2]. Единица измерения веса в Международной системе единиц (СИ) — ньютон, иногда используется единица СГС — дина.
Вес P{\displaystyle \mathbf {P} } тела, покоящегося в инерциальной системе отсчёта, равен силе тяжести, действующей на тело, и пропорционален массе m{\displaystyle m} и ускорению свободного падения g{\displaystyle \mathbf {g} } в данной точке:
- P=mg.{\displaystyle \mathbf {P} =m\mathbf {g} .}
 Широтное уменьшение силы тяжести mg
Широтное уменьшение силы тяжести mgУскорение свободного падения зависит от высоты над земной поверхностью и — ввиду несферичности Земли, а также ввиду её вращения — от географических координат точки измерения. В результате суточного вращения Земли существует широтное уменьшение веса: на экваторе вес примерно на 0,3 % меньше, чем на полюсах. Другим фактором, влияющим на значение g{\displaystyle \mathbf {g} } и, соответственно, вес тела, являются гравитационные аномалии, обусловленные особенностями строения земной поверхности и недр в окрестностях точки измерения. Если тело находится вблизи другой планеты, а не Земли, то ускорение свободного падения будет определяться массой и размерами этой планеты, наряду с расстоянием между её поверхностью и телом.
При движении системы «тело» — «опора или подвес» относительно инерциальной системы отсчёта с ускорением w{\displaystyle \mathbf {w} } вес перестаёт совпадать с силой тяжести:
- P=m(g−w).{\displaystyle \mathbf {P} =m(\mathbf {g} -\mathbf {w} ).}
Например, если ускорение (независимо от скорости) лифта направлено вверх, то вес находящегося в нём груза увеличивается, а если вниз, то уменьшается. Ускорение за счёт вращения Земли не входит в w{\displaystyle \mathbf {w} }, оно уже учтено в g{\displaystyle \mathbf {g} }. Состояние отсутствия веса (невесомость) наступает вдали от притягивающего объекта, либо когда тело находится в свободном падении, то есть при g−w=0{\displaystyle \mathbf {g} -\mathbf {w} =0}.
Тело массой m{\displaystyle m}, вес которого анализируется, может стать субъектом приложения дополнительных сил, косвенно обусловленных присутствием гравитационного поля, в том числе силы Архимеда и трения. При этом воздействие изучаемого тела на опоры и подвесы будет опосредовано наличием указанных привходящих факторов.[прояснить]
В официальном определении, приведённом в преамбуле, отсутствует конкретизация, должны ли учитываться подобные факторы. Не оговорено также, обязательно ли роль опоры-подвеса должно играть упругое твёрдое тело и что если опор несколько. Кроме того, в публикациях встречаются и неэквивалентные дефиниции веса[3][4][5]. Отсюда, несмотря на ясность природы фигурирующих сил, возникают терминологические неопределённости.[источник не указан 651 день]
Так, при учёте только вклада силы тяжести покоящемуся на наклонной поверхности телу приписывается направленный по нормали к опоре вес mgcosα{\displaystyle mg\cos \alpha }, где α{\displaystyle \alpha } — угол наклона[4]. Но если учесть ещё и силу трения покоя (а она, по третьему закону Ньютона, приложена и к телу, и к опоре), то вектор веса станет равным mg{\displaystyle m\mathbf {g} }[3]. Аналогично с силой Архимеда: в жидкости или газе с плотностью ρ{\displaystyle \rho } на тело действует подъёмная сила FA=−ρgV{\displaystyle \mathbf {F} _{A}=-\rho \mathbf {g} V} (где V{\displaystyle V} — объём тела), из-за которой, скажем, воздействие тела на неровное[6] дно водоёма ослабляется. Трактуя эту ситуацию, можно либо заявить, что вес тела снижается на вес вытесненного объёма воды, либо считать, что вес по-прежнему составляет mg{\displaystyle m\mathbf {g} } и есть ещё подлежащая отдельному анализу архимедова сила.[источник не указан 651 день]В целом, в литературе доминирует подход[1][7][нет в источнике], при котором вес тела в покое вблизи Земли всегда приравнивается mg{\displaystyle m\mathbf {g} }. Этот подход означает, что вес тела с точностью до знака равен векторной сумме всех сил (кроме силы тяжести), действующих на тело, включая силы Архимеда («жидкая опора»[3]) и трения, при учёте всех имеющихся опор-подвесов совместно.
Для многих задач описанные неопределённости несущественны, так как чаще всего рассматривается неподвижное тело на сухой горизонтальной поверхности.[источник не указан 651 день]
Понятие «вес» в физике не является необходимым[8]. В принципе, можно вообще отменить этот термин и говорить либо о «массе», либо о «силе»[9] такой-то природы. Использование понятия «вес» во многом связано просто с привычкой[8] и языковыми традициями.
Очевидно более содержательной величиной является суммарная сила воздействия на опору, в нерусскоязычных изданиях иногда именуемая «кажущимся весом» (англ. apparent weight, фр. poids apparent). Знание этой величины, например, может помочь оценить способность конструкции удержать изучаемое тело в данных условиях. В ряде случаев — скажем, в ситуации привязанного на улице шарика, наполненного гелием, — кажущийся вес может оказаться направленным против вектора g{\displaystyle \mathbf {g} } ввиду влияния FA{\displaystyle \mathbf {F} _{A}}.
Вес можно измерять с помощью пружинных весов, которые могут служить и для косвенного измерения массы, если их соответствующим образом проградуировать; рычажные весы в такой градуировке не нуждаются, так как в этом случае сравниваются массы, на которые действует одинаковое ускорение свободного падения или сумма ускорений в неинерциальных системах отсчёта. При взвешивании с помощью технических пружинных весов вариациями ускорения свободного падения обычно пренебрегают, так как влияние этих вариаций обычно меньше практически необходимой точности взвешивания.
На результате измерений может в некоторой степени сказаться сила Архимеда, если при взвешивании с помощью рычажных весов сравниваются тела с различной плотностью.
В физике вес и масса — разные понятия. Вес — векторная величина, сила, с которой тело действует на горизонтальную опору или вертикальный подвес. Масса — скалярная величина, мера инертности тела (инертная масса) либо заряд гравитационного поля (гравитационная масса). У этих величин отличаются и единицы измерения (в системе СИ масса измеряется в килограммах, а вес — в ньютонах). Возможны ситуации с нулевым весом и ненулевой массой одного и того же тела, например, в условиях невесомости у всех тел вес равен нулю, а масса у каждого тела своя. И если в состоянии покоя тела показания весов будут нулевыми, то при ударе по весам тел с одинаковыми скоростями воздействие будет разным (см. закон сохранения импульса, закон сохранения энергии).
Вместе с тем строгое различение понятий веса и массы принято в основном в науке и технике, а во многих повседневных ситуациях слово «вес» продолжает использоваться, когда фактически речь идёт о «массе». Например, мы говорим, что какой-то объект «весит один килограмм», несмотря на то, что килограмм представляет собой единицу массы[10]. Кроме того, термин «вес» в значении «масса» традиционно использовался в цикле наук о человеке — в словосочетании «вес тела человека», вместо современного «масса тела человека»[11]. В связи с этим метрологические организации отмечают, что неправильное использование термина «вес» вместо термина «масса» должно прекращаться и во всех тех случаях, когда имеется в виду масса, должен использоваться термин «масса»[12][13].
III Генеральная конференция по мерам и весам, проведённая в 1901 году, подчеркнула, что термин «вес» обозначает величину той же природы, что термин «сила». Конференция определила вес тела как произведение массы тела на ускорение, обусловленное гравитационным притяжением. Стандартный вес тела конференцией был определён как произведение массы тела на стандартное ускорение, обусловленное гравитационным притяжением. В свою очередь для стандартного ускорения было принято значение 980,665 см/с2[14].
- ↑ 1 2 Рудой Ю. Г. Вес // Физическая энциклопедия : [в 5 т.] / Гл. ред. А. М. Прохоров. — М.: Советская энциклопедия, 1988. — Т. 1: Ааронова — Бома эффект — Длинные линии. — С. 262. — 707 с. — 100 000 экз.
- ↑ Сивухин Д. В. Общий курс физики. — М.: Физматлит; Изд-во МФТИ, 2005. — Т. I. Механика. — С. 373. — 560 с. — ISBN 5-9221-0225-7.
- ↑ 1 2 3 И. Е. Каган «Вес тела» (IX класс) // Фізiка: праблемы выкладання. – 2001. – № 3. – С. 58-74.
- ↑ 1 2 С. В. Задорожная «Вес тела» // Сайт педаг. сообщ. «Урок.рф» (2016).
- ↑ Во многих иноязычных публикациях вес (см., например, начало немецкой версии статьи) синонимизируется с силой тяжести, что в российской педагогике считается ошибкой.
- ↑ Неровность нужна для подтекания воды под опору, см. Л. Г. Асламазов: Гидростатика // Квант. – 1972. – № 12. (с. 57, рис. 9ав).
- ↑ Allen L. King. Weight and weightlessness (англ.) // American Journal of Physics (англ.)русск. : journal. — 1963. — Vol. 30. — P. 387. — DOI:10.1119/1.1942032. — Bibcode: 1962AmJPh..30..387K.
- ↑ 1 2 В. Г. Зубов. Механика. М.: Наука, 1978. — 352 с. // см. § 71, с. 176: «В механике понятие веса является совершенно лишним. Но так как это слово простое, привычное, то им часто пользуются».
- ↑ The National Standard of Canada, CAN/CSA-Z234.1-89 Canadian Metric Practice Guide, January 1989: 5.7.3. Considerable confusion exists in the use of the term «weight». <…> In scientific and technical work, the term «weight» should be replaced by the term «mass» or «force», depending on the application.
- ↑ Ранее в технике широко использовалась единица силы килограмм-сила — одна из основных единиц системы МКГСС.
- ↑ Медицинская энциклопедия на Академике.
- ↑ ISO 80000-4:2006, Quantities and units — Part 4: Mechanics.
- ↑ SI Units: Mass (англ.). Weights and Measures. NIST. Дата обращения 7 декабря 2016.
- ↑ Declaration on the unit of mass and on the definition of weight; conventional value of g (англ.). Resolution of the 3rd CGPM (1901). BIPM. Дата обращения 1 ноября 2015.
определения, единица измерения, примеры, относительно оси и точки
В статье мы расскажем про момент силы относительно точки и оси, определения, рисунки и графики, какая единица измерения момента силы, работа и сила во вращательном движении, а также примеры и задачи.
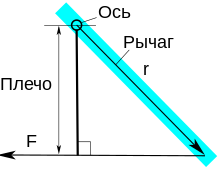
Момент силы представляет собой вектор физической величины, равный произведению векторов плеча силы (радиус-вектор частицы) и силы, действующей на точку. Силовой рычаг представляет собой вектор, соединяющий точку, через которую проходит ось вращения твердого тела с точкой, к которой приложена сила.

где: r — плечо силы, F — сила приложенная на тело.
Направление вектора силы момента всегда перпендикулярно плоскости, определяемой векторами r и F.
Главный момент — любая система сил на плоскости относительно принятого полюса называется алгебраическим моментом момента всех сил этой системы относительно этого полюса.
Во вращательных движениях важны не только сами физические величины, но и то, как они расположены относительно оси вращения, то есть их моменты. Мы уже знаем, что во вращательном движении важна не только масса, но и момент инерции. В случае силы, ее эффективность для запуска ускорения определяется способом приложения этой силы к оси вращения.

Взаимосвязь между силой и способом ее применения описывает МОМЕНТ СИЛЫ. Момент силы — это векторное произведение силового плеча R на вектор силы F:


Как в каждом векторном произведении, так и здесь



Следовательно, сила не будет влиять на вращение, когда угол между векторами силы F и рычагом R равен 0o или 180o. Каков эффект применения момента силы М?
Мы используем второй Закон движения Ньютона и связь между канатом и угловой скоростью v = Rω в скалярной форме, действительны, когда векторы R и ω перпендикулярны друг другу

Умножив обе части уравнения на R, получим

Поскольку mR 2 = I, мы заключаем, что

Вышеуказанная зависимость справедлива и для случая материального тела. Обратите внимание, что в то время как внешняя сила дает линейное ускорение a, момент внешней силы дает угловое ускорение ε.

Единица измерения момента силы
Основной мерой измерения момента силы в системной координате СИ является: [M]=Н•м
В СГС: [M]=дин•см
Работа и сила во вращательном движении
Работа в линейном движении определяется общим выражением,

но во вращательном движении,

а следовательно

Исходя из свойств смешанного произведения трех векторов, можно записать

Поэтому мы получили выражение для работы во вращательном движении:

Мощность во вращательном движении:

Момент силы пример и решение задач относительно точки
Найдите момент силы, действующей на тело в ситуациях, показанных на рисунках ниже. Предположим, что r = 1m и F = 2N.

а) поскольку угол между векторами r и F равен 90°, то sin(a)=1:
M = r • F = 1м • 2N = 2Н • м
б) потому что угол между векторами r и F равен 0°, поэтому sin(a)=0:
M = 0
да направленная сила не может дать точке вращательное движение.
c) поскольку угол между векторами r и F равен 30°, то sin(a)=0.5:
M = 0,5 r • F = 1Н • м.
Таким образом, направленная сила вызовет вращение тела, однако ее эффект будет меньше, чем в случае a).
Момент силы относительно оси
Предположим, что данные являются точкой O (полюс) и мощность P. В точке O мы принимаем начало прямоугольной системы координат. Момент силы Р по отношению к полюсным O представляет собой вектор М из (Р), (рисунок ниже).

Любая точка A на линии P имеет координаты (xo , yo , zo ).
Вектор силы P имеет координаты Px , Py, Pz. Комбинируя точку A (xo, yo, zo ) с началом системы, мы получаем вектор p. Координаты вектора силы P относительно полюса O обозначены символами Mx, My, Mz. Эти координаты могут быть вычислены как минимумы данного определителя, где ( i, j, k) — единичные векторы на осях координат (варианты): i, j, k

После решения определителя координаты момента будут равны:

Координаты вектора моментов Mo (P) называются моментами силы относительно соответствующей оси. Например, момент силы P относительно оси Oz окружает шаблон:
Mz = Pyxo — Pxyo
Этот паттерн интерпретируется геометрически так, как показано на рисунке ниже.

На основании этой интерпретации момент силы относительно оси Oz можно определить, как момент проекции силы P на перпендикуляр оси Oz относительно точки проникновения этой плоскости осью. Проекция силы P на перпендикуляр оси обозначена Pxy, а точка проникновения плоскости Oxy — осью Oс символом O.
Из приведенного выше определения момента силы относительно оси следует, что момент силы относительно оси равен нулю, когда сила и ось равны, в одной плоскости (когда сила параллельна оси или когда сила пересекает ось).
Используя формулы на Mx, My, Mz, мы можем рассчитать значение момента силы P относительно точки O и определить углы, содержащиеся между вектором M и осями системы:

Если сила лежит в плоскости Oxy, то zo = 0 и Pz = 0 (см. Рисунок ниже).

Момент силы P по отношению к точке (полюсу) O составляет:
Mx = 0,
My = 0,
Mo (P) = Mz = Pyxo — Pxyo.

Метка крутящего момента:
плюс (+) — вращение силы вокруг оси O по часовой стрелке,
минус (-) — вращение силы вокруг оси O против часовой стрелки.