


Физика. Понятия и определения.
Что такое сила?
Если тело ускоряется то на него что-то действует. А как найти это «что-то»? Например, что за силы действуют на тело вблизи поверхности земли? Это — сила тяжести, направленная вертикально вниз, пропорциональная массе тела и для высот, много меньших, чем радиус земли ${\large R}$, почти независящая от высоты; она равна
${\large F = \dfrac {G \cdot m \cdot M}{R^2} = m \cdot g }$
где
${\large g = \dfrac {G \cdot M}{R^2} }$
так называемое ускорение силы тяжести. В горизонтальном направлении тело будет двигаться с постоянной скоростью, однако движение в вертикальном направлении по второму закону Ньютона:
${\large m \cdot g = m \cdot \left ( \dfrac {d^2 \cdot x}{d \cdot t^2} \right ) }$
после сокращения ${\large m}$ получаем, что ускорение в направлении ${\large x}$ постоянно и равно ${\large g}$. Это хорошо известное движение свободно падающего тела, которое описывается уравнениями
${\large v_x = v_0 + g \cdot t}$
${\large x = x_0 + x_0 \cdot t + \dfrac {1}{2} \cdot g \cdot t^2}$
В чем сила измеряется?
Во всех учебниках и умных книжках, силу принято выражать в Ньютонах, но кроме как в моделях которыми оперируют физики ньютоны ни где не применяются. Это крайне неудобно.
Ньютон newton (Н) — производная единица измерения силы в Международной системе единиц (СИ).
Исходя из второго закона Ньютона, единица ньютон определяется как сила, изменяющая за одну секунду скорость тела массой один килограмм на 1 метр в секунду в направлении действия силы.
Таким образом, 1 Н = 1 кг·м/с².
Килограмм-сила (кгс или кГ) — гравитационная метрическая единица силы, равная силе, которая действует на тело массой один килограмм в гравитационном поле земли. Поэтому по определению килограмм-сила равна 9,80665 Н. Килограмм-сила удобна тем, что её величина равна весу тела массой в 1 кг.
1 кгс = 9,80665 ньютонов (примерно ≈ 10 Н)
1 Н ≈ 0,10197162 кгс ≈ 0,1 кгс
1 Н = 1 кг x 1м/с2.
Закон тяготения
Каждый объект Вселенной притягивается к любому другому объекту с силой, пропорциональной их массам и обратно пропорционально квадрату расстояния между ними.
${\large F = G \cdot \dfrac {m \cdot M}{R^2}}$
Добавить можно, что любое тело реагирует на приложенную к нему силу ускорением в направлении этой силы, по величине обратно пропорциональным массе тела.
${\large G}$ — гравитационная постоянная
${\large M}$ — масса земли
${\large R}$ — радиус земли
${\large G = 6,67 \cdot {10^{-11}} \left ( \dfrac {m^3}{kg \cdot {sec}^2} \right ) }$
${\large M = 5,97 \cdot {10^{24}} \left ( kg \right ) }$
${\large R = 6,37 \cdot {10^{6}} \left ( m \right ) }$
В рамках классической механики, гравитационное взаимодействие описывается законом всемирного тяготения Ньютона, согласно которому сила гравитационного притяжения между двумя телами массы ${\large m_1}$ и ${\large m_2}$, разделённых расстоянием ${\large R}$ есть
${\large F = -G \cdot \dfrac {m_1 \cdot m_2}{R^2}}$
Здесь ${\large G}$ — гравитационная постоянная, равная ${\large 6,673 \cdot {10^{-11}} m^3 / \left ( kg \cdot {sec}^2 \right ) }$. Знак минус означает, что сила, действующая на пробное тело, всегда направлена по радиус-вектору от пробного тела к источнику гравитационного поля, т.е. гравитационное взаимодействие приводит всегда к притяжению тел.
Поле тяжести потенциально. Это значит, что можно ввести потенциальную энергию гравитационного притяжения пары тел, и эта энергия не изменится после перемещения тел по замкнутому контуру. Потенциальность поля тяжести влечёт за собой закон сохранения суммы кинетической и потенциальной энергии, что при изучении движения тел в поле тяжести часто существенно упрощает решение.
В рамках ньютоновской механики гравитационное взаимодействие является дальнодействующим. Это означает, что как бы массивное тело ни двигалось, в любой точке пространства гравитационный потенциал и сила зависят только от положения тела в данный момент времени.
Тяжелее — Легче
Вес тела ${\large P}$ выражается произведением его массы ${\large m}$ на ускорение силы тяжести ${\large g}$.
${\large P = m \cdot g}$
Когда на земле тело становится легче (слабее давит на весы), это происходит от уменьшения массы. На луне все не так, уменьшение веса вызвано изменением другого множителя — ${\large g}$, так как ускорение силы тяжести на поверхности луны в шесть раз меньше чем на земле.
масса земли = ${\large 5,9736 \cdot {10^{24}}\ kg }$
масса луны = ${\large 7,3477 \cdot {10^{22}}\ kg }$
ускорение свободного падения на Земле = ${\large 9,81\ m / c^2 }$
ускорение свободного падения на Луне = ${\large 1,62 \ m / c^2 }$
В результате произведение ${\large m \cdot g }$, а следовательно и вес уменьшаются в 6 раз.
Но нельзя обозначить оба эти явления одним и тем же выражением «сделать легче». На луне тела становятся не легче, а лишь менее стремительно падают они «менее падучи»))).
Векторные и скалярные величины
Векторная величина (например сила, приложенная к телу), помимо значения (модуля), характеризуется также направлением. Скалярная же величина (например, длина) характеризуется только значением. Все классические законы механики сформулированы для векторных величин.
 |
|
Рисунок 1.
На рис. 1 изображены различные варианты расположения вектора ${ \large \overrightarrow{F}}$ и его проекции ${ \large F_x}$ и ${ \large F_y}$ на оси ${ \large X}$ и ${ \large Y}$ соответственно:
- A. величины ${ \large F_x}$ и ${ \large F_y}$ являются ненулевыми и положительными
- B. величины ${ \large F_x}$ и ${ \large F_y}$ являются ненулевыми, при этом ${\large F_y}$ — положительная величина, а ${\large F_x}$ — отрицательная, т.к. вектор ${\large \overrightarrow{F}}$ направлен в сторону, противоположную направлению оси ${\large X}$
- C. ${\large F_y}$ — положительная ненулевая величина, ${\large F_x}$ равна нулю, т.к. вектор ${\large \overrightarrow{F}}$ направлен перпендикулярно оси ${\large X}$
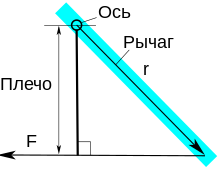
Момент силы
Моментом силы называют векторное произведение радиус-вектора, проведённого от оси вращения к точке приложения силы, на вектор этой силы. Т.е. согласно классическому определению момент силы — величина векторная. В рамках нашей задачи, это определение можно упростить до следующего: моментом силы ${\large \overrightarrow{F}}$, приложенной к точке с координатой ${\large x_F}$, относительно оси, расположенной в точке ${\large x_0}$ называется скалярная величина, равная произведению модуля силы ${\large \overrightarrow{F}}$, на плечо силы — ${\large \left | x_F — x_0 \right |}$. А знак этой скалярной величины зависит от направления силы: если она вращает объект по часовой стрелке, то знак плюс, если против — то минус.
Важно понимать, что ось мы можем выбирать произвольным образом — если тело не вращается, то сумма моментов сил относительно любой оси равна нулю. Второе важное замечание — если сила приложена к точке, через которую проходит ось, то момент этой силы относительно этой оси равен нулю (поскольку плечо силы будет равно нулю).

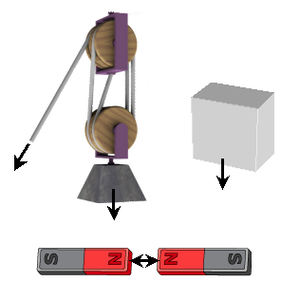
Проиллюстрируем вышесказанное примером, на рис.2. Предположим, что система, изображенная на рис. 2, находится в равновесии. Рассмотрим опору, на которой стоят грузы. На неё действуют 3 силы: ${\large \overrightarrow{N_1},\ \overrightarrow{N_2},\ \overrightarrow{N},}$ точки приложения этих сил
${\large \overrightarrow{N_{1}} = — \overrightarrow{N_{1}^{gr}}}$
${\large \overrightarrow{N_{2}} = — \overrightarrow{N_{2}^{gr}}}$
Теперь рассмотрим условие равенства моментов сил, действующих на опору, относительно оси, проходящей через точку А (и, как мы договаривались ранее, перпендикулярную плоскости рисунка):
${\large N \cdot l_1 — N_2 \cdot \left ( l_1 +l_2 \right ) = 0}$
Обратите внимание, что в уравнение не вошёл момент силы ${\large \overrightarrow{N_1}}$, поскольку плечо этой силы относительно рассматриваемой оси равно ${\large 0}$. Если же мы по каким-либо причинам хотим выбрать ось, проходящую через точку С, то условие равенства моментов сил будет выглядеть так:
${\large N_1 \cdot l_1 — N_2 \cdot l_2 = 0}$
Можно показать, что с математической точки зрения два последних уравнения эквивалентны.
Центр тяжести
Центром тяжести механической системы называется точка, относительно которой суммарный момент сил тяжести, действующих на систему, равен нулю.
Центр масс
Точка центра масс замечательна тем , что если на частицы образующие тело (неважно будет ли оно твердым или жидким, скоплением звезд или чем то другим) действует великое множество сил (имеются ввиду только внешние силы, поскольку все внутренние силы компенсируют друг друга), то результирующая сила приводит к такому ускорению этой точки, как будто в ней вся масса тела ${\large m}$.
Положение центра масс определяется уравнением:
${\large R_{c.m.} = \frac{\sum m_i\, r_i}{\sum m_i}}$
Это векторное уравнение, т.е. фактически три уравнения — по одному для каждого из трех направлений. Но рассмотрим только ${\large x}$ направление. Что означает следующее равенство?
${\large X_{c.m.} = \frac{\sum m_i\, x_i}{\sum m_i}}$
Предположим тело разделено на маленькие кусочки с одинаковой массой ${\large m}$, причем полная масса тела равна будет равна числу таких кусочков ${\large N}$, умноженному на массу одного кусочка, например 1 грамм. Тогда это уравнение означает, что нужно взять координаты ${\large x}$ всех кусочков, сложить их и результат разделить на число кусочков. Иными словами, если массы кусочков равны то ${\large X_{c.m.}}$ будет просто средним арифметическим ${\large x}$ координат всех кусочков.
 |
центр масс сложного тела лежит на линии, соединяющей центры масс двух составляющих его частей |
Масса и плотность
Масса — фундаментальная физическая величина. Масса характеризует сразу несколько свойств тела и сама по себе обладает рядом важных свойств.
- Масса служит мерой содержащегося в теле вещества.
- Масса является мерой инертности тела. Инертностью называется свойство тела сохранять свою скорость неизменной (в инерциальной системе отсчёта), когда внешние воздействия отсутствуют или компенсируют друг друга. При наличии внешних воздействий инертность тела проявляется в том, что его скорость меняется не мгновенно, а постепенно, и тем медленнее, чем больше инертность (т.е. масса) тела. Например, если бильярдный шар и автобус движутся с одинаковой скоростью и тормозятся одинаковым усилием, то для остановки шара требуется гораздо меньше времени, чем для остановки автобуса.
- Массы тел являются причиной их гравитационного притяжения друг к другу (см. раздел «Сила тяготения»).
- Масса тела равна сумме масс его частей. Это так называемая аддитивность массы. Аддитивность позволяет использовать для измерения массы эталон — 1 кг.
- Масса изолированной системы тел не меняется со временем (закон сохранения массы).
- Масса тела не зависит от скорости его движения. Масса не меняется при переходе от одной системы отсчёта к другой.
- Плотностью однородного тела называется отношение массы тела к его объёму:
${\large p = \dfrac {m}{V} }$
Плотность не зависит от геометрических свойств тела (формы, объёма) и является характеристикой вещества тела. Плотности различных веществ представлены в справочных таблицах. Желательно помнить плотность воды: 1000 кг/м3.
Второй и третий законы Ньютона
Взаимодействие тел можно описывать с помощью понятия силы. Сила — это векторная величина, являющаяся мерой воздействия одного тела на другое.
Будучи вектором, сила характеризуется модулем (абсолютной величиной) и направлением в пространстве. Кроме того, важна точка приложения силы: одна и та же по модулю и направлению сила, приложенная в разных точках тела, может оказывать различное воздействие. Так, если взяться за обод велосипедного колеса и потянуть по касательной к ободу, то колесо начнёт вращаться. Если же тянуть вдоль радиуса, никакого вращения не будет.
Второй закон Ньютона
Произведение массы тела на вектор ускорения есть равнодействующая всех сил, приложенных к телу:
${\large m \cdot \overrightarrow{a} = \overrightarrow{F} }$
Второй закон Ньютона связывает векторы ускорения и силы. Это означает, что справедливы следующие утверждения.
- ${\large m \cdot a = F}$, где ${\large a}$ — модуль ускорения, ${\large F}$ — модуль равнодействующей силы.
- Вектор ускорения имеет одинаковое направление с вектором равнодействующей силы, так как масса тела положительна.
Третий закон Ньютона
Два тела действуют друг на друга с силами, равными по модулю и противоположными по направлению. Эти силы имеют одну и ту же физическую природу и направлены вдоль прямой, соединяющей их точки приложения.
Принцип суперпозиции
Опыт показывает, что если на данное тело действуют несколько других тел, то соответствующие силы складываются как векторы. Более точно, справедлив принцип суперпозиции.
Принцип суперпозиции сил. Пусть на тело действуют силы ${\large \overrightarrow{F_1}, \overrightarrow{F_2},\ \ldots \overrightarrow{F_n}}$ Если заменить их одной силой ${\large \overrightarrow{F} = \overrightarrow{F_1} + \overrightarrow{F_2} \ldots + \overrightarrow{F_n}}$, то результат воздействия не изменится.
Сила ${\large \overrightarrow{F}}$ называется
Момент силы — Википедия
Момент силы, приложенный к гаечному ключу. Направлен от зрителя

Моме́нт си́лы (синонимы: кру́тящий момент, враща́тельный момент, вертя́щий момент, враща́ющий момент) — векторная физическая величина, равная векторному произведению радиус-вектора, проведённого от оси вращения к точке приложения силы и вектора этой силы. Характеризует вращательное действие силы на твёрдое тело.
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют в сопротивлении материалов).
В физике момент силы можно понимать как «вращающая сила». В Международной системе единиц (СИ) единицей измерения момента силы является ньютон-метр (Н·м). Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага. Например, сила в 3 ньютона, приложенная к рычагу на расстоянии 2 метра от его оси вращения, создаёт такой же момент, что и сила в 1 ньютон, приложенная к рычагу на расстоянии 6 метров от оси вращения. Более точно момент силы частицы определяется как векторное произведение:
- M→=[r→×F→],{\displaystyle {\vec {M}}=\left[{\vec {r}}\times {\vec {F}}\right],}
где F→{\displaystyle {\vec {F}}} — сила, действующая на частицу, а r→{\displaystyle {\vec {r}}} — радиус-вектор частицы (в предположении, что ось вращения проходит через начало координат).
Для того чтобы понять, откуда появилось обозначение момента сил и как к нему пришли, стоит рассмотреть действие силы на рычаг, поворачивающийся относительно неподвижной оси. Работа, совершаемая при действии силы F→{\displaystyle {\vec {F}}} на рычаг r→{\displaystyle {\vec {r}}}, совершающий вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
Пусть под действием этой силы конец рычага смещается на бесконечно малый отрезок dl{\displaystyle dl}, которому соответствует бесконечно малый угол dφ{\displaystyle d\varphi }. Обозначим через d→l{\displaystyle {\vec {d}}l} вектор, который направлен вдоль бесконечно малого отрезка dl{\displaystyle dl} и равен ему по модулю. Угол между вектором силы F→{\displaystyle {\vec {F}}} и вектором d→l{\displaystyle {\vec {d}}l} равен β{\displaystyle \beta }, а угол между векторами r→{\displaystyle {\vec {r}}} и F→{\displaystyle {\vec {F}}} — α{\displaystyle \alpha }.
Следовательно, бесконечно малая работа dA{\displaystyle dA}, совершаемая силой F→{\displaystyle {\vec {F}}} на бесконечно малом участке dl{\displaystyle dl}, равна скалярному произведению вектора d→l{\displaystyle {\vec {d}}l} и вектора силы, то есть dA=F→⋅d→l{\displaystyle dA={\vec {F}}\cdot {\vec {d}}l}.
Теперь попытаемся выразить модуль вектора d→l{\displaystyle {\vec {d}}l} через радиус-вектор r→{\displaystyle {\vec {r}}}, а проекцию вектора силы F→{\displaystyle {\vec {F}}} на вектор d→l{\displaystyle {\vec {d}}l} — через угол α{\displaystyle \alpha }.
Так как для бесконечно малого перемещения рычага dl{\displaystyle dl} можно считать, что траектория перемещения перпендикулярна рычагу r→{\displaystyle {\vec {r}}}, используя соотношения для прямоугольного треугольника, можно записать следующее равенство: dl=rtgdφ{\displaystyle dl=r\mathrm {tg} \,d\varphi }, где в случае малого угла справедливо tgdφ=dφ{\displaystyle \mathrm {tg} \,d\varphi =d\varphi } и, следовательно, |dl→|=|r→|dφ{\displaystyle \left|{\vec {dl}}\right|=\left|{\vec {r}}\right|d\varphi }.
Для проекции вектора силы F→{\displaystyle {\vec {F}}} на вектор d→l{\displaystyle {\vec {d}}l} видно, что угол β=π2−α{\displaystyle \beta ={\frac {\pi }{2}}-\alpha }, а так как cos(π2−α)=sinα{\displaystyle \cos {\left({\frac {\pi }{2}}-\alpha \right)}=\sin \alpha }, получаем, что |F→|cosβ=|F→|sinα{\displaystyle \left|{\vec {F}}\right|\cos \beta =\left|{\vec {F}}\right|\sin \alpha }.
Теперь запишем бесконечно малую работу через новые равенства: dA=|r→|dφ|F→|sinα{\displaystyle dA=\left|{\vec {r}}\right|d\varphi \left|{\vec {F}}\right|\sin \alpha }, или dA=|r→||F→|sin(α)dφ{\displaystyle dA=\left|{\vec {r}}\right|\left|{\vec {F}}\right|\sin(\alpha )d\varphi }.
Теперь видно, что произведение |r→||F→|sinα{\displaystyle \left|{\vec {r}}\right|\left|{\vec {F}}\right|\sin \alpha } есть не что иное, как модуль векторного произведения векторов r→{\displaystyle {\vec {r}}} и F→{\displaystyle {\vec {F}}}, то есть |r→×F→|{\displaystyle \left|{\vec {r}}\times {\vec {F}}\right|}, которое и было принято обозначить за момент силы M{\displaystyle M}, или модуль вектора момента силы |M→|{\displaystyle \left|{\vec {M}}\right|}.
Теперь полная работа записывается просто: A=∫0φ|r→×F→|dφ{\displaystyle A=\int \limits _{0}^{\varphi }\left|{\vec {r}}\times {\vec {F}}\right|d\varphi }, или A=∫0φ|M→|dφ{\displaystyle A=\int \limits _{0}^{\varphi }\left|{\vec {M}}\right|d\varphi }.
Момент силы имеет размерность «сила, умноженная на расстояние» и единицу измерения ньютон-метр в системе СИ. 1 Н·м — это момент, который производит сила 1 Н на рычаг длиной 1 м, приложенная к концу рычага и направленная перпендикулярно ему.
Энергия и механическая работа также имеют размерность «сила, умноженная на расстояние» и измеряются в системе СИ в джоулях. Следует заметить, что энергия — это скалярная величина, тогда как момент силы — величина псевдовекторная. Совпадение размерностей этих величин не случайность: момент силы 1 Н·м, при повороте рычага или вала на 1 радиан совершает работу в 1 Дж, а при повороте на один оборот совершает механическую работу и сообщает энергию 2π{\displaystyle 2\pi } джоуля. Математически:
- E=Mθ,{\displaystyle E=M\theta ,}
где E{\displaystyle E} — энергия, M{\displaystyle M} — вращающий момент, θ{\displaystyle \theta } — угол в радианах.
Формула момента рычага[править | править код]
 Момент, действующий на рычаг
Момент, действующий на рычагОчень интересен особый случай, представляемый как определение момента силы в поле:
- |M→|=|M→1||F→|,{\displaystyle \left|{\vec {M}}\right|=\left|{\vec {M}}_{1}\right|\left|{\vec {F}}\right|,}
где: |M→1|{\displaystyle \left|{\vec {M}}_{1}\right|} — момент рычага, |F→|{\displaystyle \left|{\vec {F}}\right|} — величина действующей силы.
Недостаток такого представления в том, что оно не дает направления момента силы, а только его величину. Если сила перпендикулярна вектору r→{\displaystyle {\vec {r}}}, момент рычага будет равен расстоянию от центра до точки приложения силы и момент силы будет максимален:
- |T→|=|r→||F→|.{\displaystyle \left|{\vec {T}}\right|=\left|{\vec {r}}\right|\left|{\vec {F}}\right|.}
Сила под углом[править | править код]
Если сила F→{\displaystyle {\vec {F}}} направлена под углом θ{\displaystyle \theta } к рычагу r, то M=rFsinθ{\displaystyle M=rF\sin \theta }.
Статическое равновесие[править | править код]
Для того чтобы объект находился в равновесии, должна равняться нулю не только сумма всех сил, но и сумма всех моментов силы вокруг любой точки. Для двумерного случая с горизонтальными и вертикальными силами: сумма сил в двух измерениях ΣH=0,ΣV=0{\displaystyle \Sigma H=0,\,\Sigma V=0} и момент силы в третьем измерении ΣM=0{\displaystyle \Sigma M=0}.
Момент силы как функция от времени[править | править код]
Момент силы — производная по времени от момента импульса,
Видеоурок: вращающий момент- M→=dL→dt,{\displaystyle {\vec {M}}={\frac {d{\vec {L}}}{dt}},}
где L→{\displaystyle {\vec {L}}} — момент импульса.
Возьмём твердое тело. Движение твёрдого тела можно представить как движение конкретной точки и вращения вокруг неё.
Момент импульса относительно точки O твёрдого тела может быть описан через произведение момента инерции и угловой скорости относительно центра масс и линейного движения центра масс.
- Lo→=Icω→+[M(ro→−rc→),vc→].{\displaystyle {\vec {L_{o}}}=I_{c}\,{\vec {\omega }}+[M({\vec {r_{o}}}-{\vec {r_{c}}}),{\vec {v_{c}}}].}
Будем рассматривать вращающиеся движения в системе координат Кёнига, так как описывать движение твёрдого тела в мировой системе координат гораздо сложнее.
Продифференцируем это выражение по времени. И если I{\displaystyle I} — постоянная величина во времени, то
- M→=Idω→dt=Iα→,{\displaystyle {\vec {M}}=I{\frac {d{\vec {\omega }}}{dt}}=I{\vec {\alpha }},}
где α→{\displaystyle {\vec {\alpha }}} — угловое ускорение, измеряемое в радианах в секунду за секунду (рад/с2). Пример: вращается однородный диск.
Если тензор инерции меняется со временем, то движение относительно центра масс описывается с помощью динамического уравнения Эйлера:
- Mc→=Icdω→dt+[w→,Icw→].{\displaystyle {\vec {M_{c}}}=I_{c}{\frac {d{\vec {\omega }}}{dt}}+[{\vec {w}},I_{c}{\vec {w}}].}
Отношение между моментом силы и мощностью[править | править код]
Если сила совершает действие на каком-либо расстоянии, то она совершает механическую работу. Так же и момент силы, если совершает действие через угловое расстояние, он совершает работу.
- P=M→⋅ω→.{\displaystyle P={\vec {M}}\cdot {\vec {\omega }}.}
В системе СИ мощность P{\displaystyle P} измеряется в ваттах, момент силы — в ньютоно-метрах, а угловая скорость — в радианах в секунду.
Отношение между моментом силы и работой[править | править код]
- A=∫θ1θ2|M→|dθ.{\displaystyle A=\int _{\theta _{1}}^{\theta _{2}}\left|{\vec {M}}\right|\mathrm {d} \theta .}
В случае постоянного момента получаем:
- A=|M→|θ.{\displaystyle A=\left|{\vec {M}}\right|\theta .}
В системе СИ работа A{\displaystyle A} измеряется в джоулях, момент силы — в ньютоно-метрах, а угол — в радианах.
Обычно известна угловая скорость ω{\displaystyle \omega } в радианах в секунду и время действия момента t{\displaystyle t}.
Тогда совершённая моментом силы работа рассчитывается как:
- A=|M→|ωt.{\displaystyle A=\left|{\vec {M}}\right|\omega t.}
Если имеется материальная точка OF{\displaystyle O_{F}}, к которой приложена сила F→{\displaystyle {\vec {F}}}, то момент силы относительно точки O{\displaystyle O} равен векторному произведению радиус-вектора r→{\displaystyle {\vec {r}}}, соединяющего точки O{\displaystyle O} и OF{\displaystyle O_{F}}, на вектор силы F→{\displaystyle {\vec {F}}}:
- MO→=[r→×F→].{\displaystyle {\vec {M_{O}}}=\left[{\vec {r}}\times {\vec {F}}\right].}
Момент силы относительно оси равен алгебраическому значению проекции момента этой силы на плоскость, перпендикулярную этой оси относительно точки пересечения оси с плоскостью, то есть
- Mz(F)=Mo(F′)=F′h′.{\displaystyle M_{z}(F)=M_{o}(F’)=F’h’.}
Измерение момента силы осуществляется с помощью специальных приборов — торсиометров. Принцип их действия обычно основан на измерении угла закручивания упругого вала, передающего крутящий момент, либо на измерении деформации некоторого упругого рычага. Измерения деформации и угла закручивания производится различными датчиками деформации — тензометрическими, магнитоупругими, а также измерителями малых перемещений — оптическими, ёмкостными, индуктивными, ультразвуковыми, механическими.
Существуют специальные динамометрические ключи для измерения крутящего момента затягивания резьбовых соединений и регулируемые и нерегулируемые ограничители крутящего момента, так называемые «трещотки», применяемые в гаечных ключах, шуруповёртах, винтовых микрометрах и др.
Сила упругости — Википедия
Материал из Википедии — свободной энциклопедии
Си́ла упру́гости — сила, возникающая в теле в результате его деформации и стремящаяся вернуть его в исходное (начальное) состояние.
В случае упругих деформаций энергия деформации является потенциальной. Сила упругости имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. В простейшем случае растяжения/сжатия тела сила упругости направлена противоположно смещению частиц тела, перпендикулярно поверхности.
Вектор силы противоположен направлению деформации тела (смещению его молекул). Если исчезает деформация тела, то исчезает и сила упругости.
В Международной системе единиц (СИ) сила упругости так же, как и все другие силы, измеряется в ньютонах (русское обозначение: Н; международное: N).
В простейшем случае одномерных малых упругих деформаций формула для силы упругости имеет вид:
- F=kΔl{\displaystyle F=k\Delta l},
где k{\displaystyle \ k} — жёсткость тела (коэффициент упругости), Δl{\displaystyle \ \Delta l} — удлинение (величина деформации).
Жёсткость тела зависит от его формы и размеров, а также от материала, из которого оно изготовлено.
В словесной формулировке закон Гука звучит следующим образом:
Сила упругости, возникающая при деформации тела, прямо пропорциональна удлинению и направлена противоположно направлению перемещения частиц тела относительно других частиц при деформации.
При увеличении величины деформации, закон Гука перестаёт действовать, сила упругости начинает сложным образом зависеть от величины растяжения или сжатия.
Вес — Википедия

Вес — сила, с которой тело действует на опору (или подвес, или другой вид крепления), препятствующую падению, возникающая в поле сил тяжести[1][2]. Единица измерения веса в Международной системе единиц (СИ) — ньютон, иногда используется единица СГС — дина.
Вес P{\displaystyle \mathbf {P} } тела, покоящегося в инерциальной системе отсчёта, равен силе тяжести, действующей на тело, и пропорционален массе m{\displaystyle m} и ускорению свободного падения g{\displaystyle \mathbf {g} } в данной точке:
- P=mg.{\displaystyle \mathbf {P} =m\mathbf {g} .}
 Широтное уменьшение силы тяжести mg
Широтное уменьшение силы тяжести mgУскорение свободного падения зависит от высоты над земной поверхностью и — ввиду несферичности Земли, а также ввиду её вращения — от географических координат точки измерения. В результате суточного вращения Земли существует широтное уменьшение веса: на экваторе вес примерно на 0,3 % меньше, чем на полюсах. Другим фактором, влияющим на значение g{\displaystyle \mathbf {g} } и, соответственно, вес тела, являются гравитационные аномалии, обусловленные особенностями строения земной поверхности и недр в окрестностях точки измерения. Если тело находится вблизи другой планеты, а не Земли, то ускорение свободного падения будет определяться массой и размерами этой планеты, наряду с расстоянием между её поверхностью и телом.
При движении системы «тело» — «опора или подвес» относительно инерциальной системы отсчёта с ускорением w{\displaystyle \mathbf {w} } вес перестаёт совпадать с силой тяжести:
- P=m(g−w).{\displaystyle \mathbf {P} =m(\mathbf {g} -\mathbf {w} ).}
Например, если ускорение (независимо от скорости) лифта направлено вверх, то вес находящегося в нём груза увеличивается, а если вниз, то уменьшается. Ускорение за счёт вращения Земли не входит в w{\displaystyle \mathbf {w} }, оно уже учтено в g{\displaystyle \mathbf {g} }. Состояние отсутствия веса (невесомость) наступает вдали от притягивающего объекта, либо когда тело находится в свободном падении, то есть при g−w=0{\displaystyle \mathbf {g} -\mathbf {w} =0}.
Тело массой m{\displaystyle m}, вес которого анализируется, может стать субъектом приложения дополнительных сил, косвенно обусловленных присутствием гравитационного поля, в том числе силы Архимеда и трения. При этом воздействие изучаемого тела на опоры и подвесы будет опосредовано наличием указанных привходящих факторов.[прояснить]
В официальном определении, приведённом в преамбуле, отсутствует конкретизация, должны ли учитываться подобные факторы. Не оговорено также, обязательно ли роль опоры-подвеса должно играть упругое твёрдое тело и что если опор несколько. Кроме того, в публикациях встречаются и неэквивалентные дефиниции веса[3][4][5]. Отсюда, несмотря на ясность природы фигурирующих сил, возникают терминологические неопределённости.[источник не указан 651 день]
Так, при учёте только вклада силы тяжести покоящемуся на наклонной поверхности телу приписывается направленный по нормали к опоре вес mgcosα{\displaystyle mg\cos \alpha }, где α{\displaystyle \alpha } — угол наклона[4]. Но если учесть ещё и силу трения покоя (а она, по третьему закону Ньютона, приложена и к телу, и к опоре), то вектор веса станет равным mg{\displaystyle m\mathbf {g} }[3]. Аналогично с силой Архимеда: в жидкости или газе с плотностью ρ{\displaystyle \rho } на тело действует подъёмная сила FA=−ρgV{\displaystyle \mathbf {F} _{A}=-\rho \mathbf {g} V} (где V{\displaystyle V} — объём тела), из-за которой, скажем, воздействие тела на неровное[6] дно водоёма ослабляется. Трактуя эту ситуацию, можно либо заявить, что вес тела снижается на вес вытесненного объёма воды, либо считать, что вес по-прежнему составляет mg{\displaystyle m\mathbf {g} } и есть ещё подлежащая отдельному анализу архимедова сила.[источник не указан 651 день]В целом, в литературе доминирует подход[1][7][нет в источнике], при котором вес тела в покое вблизи Земли всегда приравнивается mg{\displaystyle m\mathbf {g} }. Этот подход означает, что вес тела с точностью до знака равен векторной сумме всех сил (кроме силы тяжести), действующих на тело, включая силы Архимеда («жидкая опора»[3]) и трения, при учёте всех имеющихся опор-подвесов совместно.
Для многих задач описанные неопределённости несущественны, так как чаще всего рассматривается неподвижное тело на сухой горизонтальной поверхности.[источник не указан 651 день]
Понятие «вес» в физике не является необходимым[8]. В принципе, можно вообще отменить этот термин и говорить либо о «массе», либо о «силе»[9] такой-то природы. Использование понятия «вес» во многом связано просто с привычкой[8] и языковыми традициями.
Очевидно более содержательной величиной является суммарная сила воздействия на опору, в нерусскоязычных изданиях иногда именуемая «кажущимся весом» (англ. apparent weight, фр. poids apparent). Знание этой величины, например, может помочь оценить способность конструкции удержать изучаемое тело в данных условиях. В ряде случаев — скажем, в ситуации привязанного на улице шарика, наполненного гелием, — кажущийся вес может оказаться направленным против вектора g{\displaystyle \mathbf {g} } ввиду влияния FA{\displaystyle \mathbf {F} _{A}}.
Вес можно измерять с помощью пружинных весов, которые могут служить и для косвенного измерения массы, если их соответствующим образом проградуировать; рычажные весы в такой градуировке не нуждаются, так как в этом случае сравниваются массы, на которые действует одинаковое ускорение свободного падения или сумма ускорений в неинерциальных системах отсчёта. При взвешивании с помощью технических пружинных весов вариациями ускорения свободного падения обычно пренебрегают, так как влияние этих вариаций обычно меньше практически необходимой точности взвешивания.
На результате измерений может в некоторой степени сказаться сила Архимеда, если при взвешивании с помощью рычажных весов сравниваются тела с различной плотностью.
В физике вес и масса — разные понятия. Вес — векторная величина, сила, с которой тело действует на горизонтальную опору или вертикальный подвес. Масса — скалярная величина, мера инертности тела (инертная масса) либо заряд гравитационного поля (гравитационная масса). У этих величин отличаются и единицы измерения (в системе СИ масса измеряется в килограммах, а вес — в ньютонах). Возможны ситуации с нулевым весом и ненулевой массой одного и того же тела, например, в условиях невесомости у всех тел вес равен нулю, а масса у каждого тела своя. И если в состоянии покоя тела показания весов будут нулевыми, то при ударе по весам тел с одинаковыми скоростями воздействие будет разным (см. закон сохранения импульса, закон сохранения энергии).
Вместе с тем строгое различение понятий веса и массы принято в основном в науке и технике, а во многих повседневных ситуациях слово «вес» продолжает использоваться, когда фактически речь идёт о «массе». Например, мы говорим, что какой-то объект «весит один килограмм», несмотря на то, что килограмм представляет собой единицу массы[10]. Кроме того, термин «вес» в значении «масса» традиционно использовался в цикле наук о человеке — в словосочетании «вес тела человека», вместо современного «масса тела человека»[11]. В связи с этим метрологические организации отмечают, что неправильное использование термина «вес» вместо термина «масса» должно прекращаться и во всех тех случаях, когда имеется в виду масса, должен использоваться термин «масса»[12][13].
III Генеральная конференция по мерам и весам, проведённая в 1901 году, подчеркнула, что термин «вес» обозначает величину той же природы, что термин «сила». Конференция определила вес тела как произведение массы тела на ускорение, обусловленное гравитационным притяжением. Стандартный вес тела конференцией был определён как произведение массы тела на стандартное ускорение, обусловленное гравитационным притяжением. В свою очередь для стандартного ускорения было принято значение 980,665 см/с2[14].
- ↑ 1 2 Рудой Ю. Г. Вес // Физическая энциклопедия : [в 5 т.] / Гл. ред. А. М. Прохоров. — М.: Советская энциклопедия, 1988. — Т. 1: Ааронова — Бома эффект — Длинные линии. — С. 262. — 707 с. — 100 000 экз.
- ↑ Сивухин Д. В. Общий курс физики. — М.: Физматлит; Изд-во МФТИ, 2005. — Т. I. Механика. — С. 373. — 560 с. — ISBN 5-9221-0225-7.
- ↑ 1 2 3 И. Е. Каган «Вес тела» (IX класс) // Фізiка: праблемы выкладання. – 2001. – № 3. – С. 58-74.
- ↑ 1 2 С. В. Задорожная «Вес тела» // Сайт педаг. сообщ. «Урок.рф» (2016).
- ↑ Во многих иноязычных публикациях вес (см., например, начало немецкой версии статьи) синонимизируется с силой тяжести, что в российской педагогике считается ошибкой.
- ↑ Неровность нужна для подтекания воды под опору, см. Л. Г. Асламазов: Гидростатика // Квант. – 1972. – № 12. (с. 57, рис. 9ав).
- ↑ Allen L. King. Weight and weightlessness (англ.) // American Journal of Physics (англ.)русск. : journal. — 1963. — Vol. 30. — P. 387. — DOI:10.1119/1.1942032. — Bibcode: 1962AmJPh..30..387K.
- ↑ 1 2 В. Г. Зубов. Механика. М.: Наука, 1978. — 352 с. // см. § 71, с. 176: «В механике понятие веса является совершенно лишним. Но так как это слово простое, привычное, то им часто пользуются».
- ↑ The National Standard of Canada, CAN/CSA-Z234.1-89 Canadian Metric Practice Guide, January 1989: 5.7.3. Considerable confusion exists in the use of the term «weight». <…> In scientific and technical work, the term «weight» should be replaced by the term «mass» or «force», depending on the application.
- ↑ Ранее в технике широко использовалась единица силы килограмм-сила — одна из основных единиц системы МКГСС.
- ↑ Медицинская энциклопедия на Академике.
- ↑ ISO 80000-4:2006, Quantities and units — Part 4: Mechanics.
- ↑ SI Units: Mass (англ.). Weights and Measures. NIST. Дата обращения 7 декабря 2016.
- ↑ Declaration on the unit of mass and on the definition of weight; conventional value of g (англ.). Resolution of the 3rd CGPM (1901). BIPM. Дата обращения 1 ноября 2015.
определения, единица измерения, примеры, относительно оси и точки
В статье мы расскажем про момент силы относительно точки и оси, определения, рисунки и графики, какая единица измерения момента силы, работа и сила во вращательном движении, а также примеры и задачи.
Момент силы представляет собой вектор физической величины, равный произведению векторов плеча силы (радиус-вектор частицы) и силы, действующей на точку. Силовой рычаг представляет собой вектор, соединяющий точку, через которую проходит ось вращения твердого тела с точкой, к которой приложена сила.

где: r — плечо силы, F — сила приложенная на тело.
Направление вектора силы момента всегда перпендикулярно плоскости, определяемой векторами r и F.
Главный момент — любая система сил на плоскости относительно принятого полюса называется алгебраическим моментом момента всех сил этой системы относительно этого полюса.
Во вращательных движениях важны не только сами физические величины, но и то, как они расположены относительно оси вращения, то есть их моменты. Мы уже знаем, что во вращательном движении важна не только масса, но и момент инерции. В случае силы, ее эффективность для запуска ускорения определяется способом приложения этой силы к оси вращения.

Взаимосвязь между силой и способом ее применения описывает МОМЕНТ СИЛЫ. Момент силы — это векторное произведение силового плеча R на вектор силы F:


Как в каждом векторном произведении, так и здесь



Следовательно, сила не будет влиять на вращение, когда угол между векторами силы F и рычагом R равен 0o или 180o. Каков эффект применения момента силы М?
Мы используем второй Закон движения Ньютона и связь между канатом и угловой скоростью v = Rω в скалярной форме, действительны, когда векторы R и ω перпендикулярны друг другу

Умножив обе части уравнения на R, получим

Поскольку mR 2 = I, мы заключаем, что

Вышеуказанная зависимость справедлива и для случая материального тела. Обратите внимание, что в то время как внешняя сила дает линейное ускорение a, момент внешней силы дает угловое ускорение ε.

Единица измерения момента силы
Основной мерой измерения момента силы в системной координате СИ является: [M]=Н•м
В СГС: [M]=дин•см
Работа и сила во вращательном движении
Работа в линейном движении определяется общим выражением,

но во вращательном движении,

а следовательно

Исходя из свойств смешанного произведения трех векторов, можно записать

Поэтому мы получили выражение для работы во вращательном движении:

Мощность во вращательном движении:

Момент силы пример и решение задач относительно точки
Найдите момент силы, действующей на тело в ситуациях, показанных на рисунках ниже. Предположим, что r = 1m и F = 2N.

а) поскольку угол между векторами r и F равен 90°, то sin(a)=1:
M = r • F = 1м • 2N = 2Н • м
б) потому что угол между векторами r и F равен 0°, поэтому sin(a)=0:
M = 0
да направленная сила не может дать точке вращательное движение.
c) поскольку угол между векторами r и F равен 30°, то sin(a)=0.5:
M = 0,5 r • F = 1Н • м.
Таким образом, направленная сила вызовет вращение тела, однако ее эффект будет меньше, чем в случае a).
Момент силы относительно оси
Предположим, что данные являются точкой O (полюс) и мощность P. В точке O мы принимаем начало прямоугольной системы координат. Момент силы Р по отношению к полюсным O представляет собой вектор М из (Р), (рисунок ниже).

Любая точка A на линии P имеет координаты (xo , yo , zo ).
Вектор силы P имеет координаты Px , Py, Pz. Комбинируя точку A (xo, yo, zo ) с началом системы, мы получаем вектор p. Координаты вектора силы P относительно полюса O обозначены символами Mx, My, Mz. Эти координаты могут быть вычислены как минимумы данного определителя, где ( i, j, k) — единичные векторы на осях координат (варианты): i, j, k

После решения определителя координаты момента будут равны:

Координаты вектора моментов Mo (P) называются моментами силы относительно соответствующей оси. Например, момент силы P относительно оси Oz окружает шаблон:
Mz = Pyxo — Pxyo
Этот паттерн интерпретируется геометрически так, как показано на рисунке ниже.

На основании этой интерпретации момент силы относительно оси Oz можно определить, как момент проекции силы P на перпендикуляр оси Oz относительно точки проникновения этой плоскости осью. Проекция силы P на перпендикуляр оси обозначена Pxy, а точка проникновения плоскости Oxy — осью Oс символом O.
Из приведенного выше определения момента силы относительно оси следует, что момент силы относительно оси равен нулю, когда сила и ось равны, в одной плоскости (когда сила параллельна оси или когда сила пересекает ось).
Используя формулы на Mx, My, Mz, мы можем рассчитать значение момента силы P относительно точки O и определить углы, содержащиеся между вектором M и осями системы:

Если сила лежит в плоскости Oxy, то zo = 0 и Pz = 0 (см. Рисунок ниже).

Момент силы P по отношению к точке (полюсу) O составляет:
Mx = 0,
My = 0,
Mo (P) = Mz = Pyxo — Pxyo.

Метка крутящего момента:
плюс (+) — вращение силы вокруг оси O по часовой стрелке,
минус (-) — вращение силы вокруг оси O против часовой стрелки.
Сила тяжести, трения, реакции опоры, упругости, Архимеда, сопротивления, вес. Направление, точка приложения, природа возникновения
Тестирование онлайн
Что надо знать о силе
Сила — векторная величина. Необходимо знать точку приложения и направление каждой силы. Важно уметь определить какие именно силы действуют на тело и в каком направлении. Сила обозначается как , измеряется в Ньютонах. Для того, чтобы различать силы, их обозначают следующим образом
Ниже представлены основные силы, действующие в природе. Придумывать не существующие силы при решении задач нельзя!
Сил в природе много. Здесь рассмотрены силы, которые рассматриваются в школьном курсе физики при изучении динамики. А также упомянуты другие силы, которые будут рассмотрены в других разделах.
Сила тяжести
На каждое тело, находящееся на планете, действует гравитация Земли. Сила, с которой Земля притягивает каждое тело, определяется по формуле
Точка приложения находится в центре тяжести тела. Сила тяжести всегда направлена вертикально вниз.
Сила трения
Познакомимся с силой трения. Эта сила возникает при движении тел и соприкосновении двух поверхностей. Возникает сила в результате того, что поверхности, если рассмотреть под микроскопом, не являются гладкими, как кажутся. Определяется сила трения по формуле:
Сила приложена в точке соприкосновения двух поверхностей. Направлена в сторону противоположную движению.
Так как тело представляем в виде материальной точки, силу можно изображать с центра
Сила реакции опоры
Представим очень тяжелый предмет, лежащий на столе. Стол прогибается под тяжестью предмета. Но согласно третьему закону Ньютона стол воздействует на предмет с точно такой же силой, что и предмет на стол. Сила направлена противоположно силе, с которой предмет давит на стол. То есть вверх. Эта сила называется реакцией опоры. Название силы «говорит» реагирует опора. Эта сила возникает всегда, когда есть воздействие на опору. Природа ее возникновения на молекулярном уровне. Предмет как бы деформировал привычное положение и связи молекул (внутри стола), они, в свою очередь, стремятся вернуться в свое первоначальное состояние, «сопротивляются».
Абсолютно любое тело, даже очень легкое (например,карандаш, лежащий на столе), на микроуровне деформирует опору. Поэтому возникает реакция опоры.
Специальной формулы для нахождения этой силы нет. Обозначают ее буквой , но эта сила просто отдельный вид силы упругости, поэтому она может быть обозначена и как
Сила приложена в точке соприкосновения предмета с опорой. Направлена перпендикулярно опоре.
Так как тело представляем в виде материальной точки, силу можно изображать с центра
Сила упругости
Это сила возникает в результате деформации (изменения первоначального состояния вещества). Например, когда растягиваем пружину, мы увеличиваем расстояние между молекулами материала пружины. Когда сжимаем пружину — уменьшаем. Когда перекручиваем или сдвигаем. Во всех этих примерах возникает сила, которая препятствует деформации — сила упругости.
Закон Гука
Сила упругости направлена противоположно деформации.
Так как тело представляем в виде материальной точки, силу можно изображать с центра
При последовательном соединении, например, пружин жесткость рассчитывается по формуле
При параллельном соединении жесткость
Жесткость образца. Модуль Юнга.
Модуль Юнга характеризует упругие свойства вещества. Это постоянная величина, зависящая только от материала, его физического состояния. Характеризует способность материала сопротивляться деформации растяжения или сжатия. Значение модуля Юнга табличное.
Подробнее о свойствах твердых тел здесь.
Вес тела
Вес тела — это сила, с которой предмет воздействует на опору. Вы скажете, так это же сила тяжести! Путаница происходит в следующем: действительно часто вес тела равен силе тяжести, но это силы совершенно разные. Сила тяжести — сила, которая возникает в результате взаимодействия с Землей. Вес — результат взаимодействия с опорой. Сила тяжести приложена в центре тяжести предмета, вес же — сила, которая приложена на опору (не на предмет)!
Формулы определения веса нет. Обозначается эта силы буквой .
Сила реакции опоры или сила упругости возникает в ответ на воздействие предмета на подвес или опору, поэтому вес тела всегда численно одинаков силе упругости, но имеет противоположное направление.
Сила реакции опоры и вес — силы одной природы, согласно 3 закону Ньютона они равны и противоположно направлены. Вес — это сила, которая действует на опору, а не на тело. Сила тяжести действует на тело.
Вес тела может быть не равен силе тяжести. Может быть как больше, так и меньше, а может быть и такое, что вес равен нулю. Это состояние называется невесомостью. Невесомость — состояние, когда предмет не взаимодействует с опорой, например, состояние полета: сила тяжести есть, а вес равен нулю!
Определить направление ускорения возможно, если определить, куда направлена равнодействующая сила
Обратите внимание, вес — сила, измеряется в Ньютонах. Как верно ответить на вопрос: «Сколько ты весишь»? Мы отвечаем 50 кг, называя не вес, а свою массу! В этом примере, наш вес равен силе тяжести, то есть примерно 500Н!
Перегрузка — отношение веса к силе тяжести
Сила Архимеда
Сила возникает в результате взаимодействия тела с жидкость (газом), при его погружении в жидкость (или газ). Эта сила выталкивает тело из воды (газа). Поэтому направлена вертикально вверх (выталкивает). Определяется по формуле:
В воздухе силой Архимеда пренебрегаем.
Если сила Архимеда равна силе тяжести, тело плавает. Если сила Архимеда больше, то оно поднимается на поверхность жидкости, если меньше — тонет.
Электрические силы
Существуют силы электрического происхождения. Возникают при наличии электрического заряда. Эти силы, такие как сила Кулона, сила Ампера, сила Лоренца, подробно рассмотрены в разделе Электричество.
Схематичное обозначение действующих на тело сил
Часто тело моделируют материальной точкой. Поэтому на схемах различные точки приложения переносят в одну точку — в центр, а тело изображают схематично кругом или прямоугольником.
Для того, чтобы верно обозначить силы, необходимо перечислить все тела, с которыми исследуемое тело взаимодействует. Определить, что происходит в результате взаимодействия с каждым: трение, деформация, притяжение или может быть отталкивание. Определить вид силы, верно обозначить направление. Внимание! Количество сил будет совпадать с числом тел, с которыми происходит взаимодействие.
Главное запомнить
1) Силы и их природа;
2) Направление сил;
3) Уметь обозначить действующие силы
Рассмотрим взаимное притяжение предмета и Земли. Между ними, согласно закону гравитации возникает сила
А сейчас сравним закон гравитации и силу тяжести
Величина ускорения свободного падения зависит от массы Земли и ее радиуса! Таким образом, можно высчитать, с каким ускорением будут падать предметы на Луне или на любой другой планете, используя массу и радиус той планеты.
Расстояние от центра Земли до полюсов меньше, чем до экватора. Поэтому и ускорение свободного падения на экваторе немного меньше, чем на полюсах. Вместе с тем, следует отметить, что основной причиной зависимости ускорения свободного падения от широты местности, является факт вращения Земли вокруг своей оси.
При удалении от поверхности Земли сила земного тяготения и ускорения свободного падения изменяются обратно пропорционально квадрату расстояния до центра Земли.
Сила (физическая величина) — это… Что такое Сила (физическая величина)?
Си́ла — векторная физическая величина, являющаяся мерой интенсивности воздействия на данное тело других тел, а также полей. Приложенная к массивному телу сила является причиной изменения его скорости или возникновения в нём деформаций.[1]
Сила как векторная величина характеризуется модулем, направлением и «точкой» приложения силы. Последним параметром понятие о силе, как векторе в физике, отличается от понятия о векторе в векторной алгебре, где равные по модулю и направлению векторы, независимо от точки их приложения, считаются одним и тем же вектором . В физике эти векторы называются свободными векторами.В механике чрезвычайно распространено представление о связанных векторах, начало которых закреплено в определённой точке пространства или же может находиться на линии, продолжающей направление вектора (скользящие векторы). [2].
Также используется понятие линия действия силы, обозначающее проходящую через точку приложения силы прямую, по которой направлена сила.
Второй закон Ньютона гласит, что в инерциальных системах отсчета ускорение материальной точки по направлению совпадает с приложенной силой, а по модулю прямо пропорционально модулю силы и обратно пропорционально массе материальной точки. Или, что эквивалентно, в инерциальных системах отсчета скорость изменения импульса материальной точки равна приложенной силе.
При приложении силы к телу конечных размеров в нём возникают механические напряжения, сопровождающиеся деформациями.[3][4][5][6]
С точки зрения Стандартной модели физики элементарных частиц фундаментальные взаимодействия (гравитационное, слабое, электромагнитное, сильное) осуществляются посредством обмена так называемыми калибровочными бозонами.[3] Эксперименты по физике высоких энергий, проведённые в 70−80-х гг. XX в. подтвердили предположение о том, что слабое и электромагнитное взаимодействия являются проявлениями более фундаментального электрослабого взаимодействия.[7]
Размерность силы — LMT−2, единицей измерения в Международной системе единиц (СИ) является ньютон (N, Н), в системе СГС — дина.
История понятия
Понятие силы использовали ещё ученые античности в своих работах о статике и движении. Изучением сил в процессе конструирования простых механизмов занимался в III в. до н. э. Архимед.[8] Представления Аристотеля о силе, связанные с фундаментальными несоответствиями, просуществовали в течение нескольких столетий. Эти несоответствия устранил в XVII в. Исаак Ньютон, используя для описания силы математические методы. Механика Ньютона оставалась общепринятой на протяжении почти трехсот лет.[5] К началу XX в. Альберт Эйнштейн в теории относительности показал, что ньютоновская механика верна лишь в при сравнительно небольших скоростях движения и массах тел в системе, уточнив тем самым основные положения кинематики и динамики и описав некоторые новые свойства пространства-времени.
Ньютоновская механика
Исаак Ньютон задался целью описать движение объектов, используя понятия инерции и силы. Сделав это, он попутно установил, что всякое механическое движение подчиняется общим законам сохранения. В 1687 г. Ньютон опубликовал свой знаменитый труд «Математические начала натуральной философии», в котором изложил три основополагающих закона классической механики (знаменитые законы Ньютона).[5][9]
Первый закон Ньютона
Первый закон Ньютона утверждает, что существуют системы отсчета, в которых тела сохраняют состояние покоя или равномерного прямолинейного движения при отсутствии действий на них со стороны других тел или при взаимной компенсации этих воздействий.[9] Такие системы отсчета называются инерциальными. Ньютон предположил, что каждый массивный объект имеет определенный запас инерции, который характеризует «естественное состояние» движения этого объекта. Эта идея отрицает взгляд Аристотеля, который рассматривал покой «естественным состоянием» объекта. Первый закон Ньютона противоречит аристотелевской физике, одним из положений которой является утверждение о том, что тело может двигаться с постоянной скоростью лишь под действием силы. Тот факт, что в механике Ньютона в инерциальных системах отсчёта покой физически неотличим от равномерного прямолинейного движения, является обоснованием принципа относительности Галилея. Среди совокупности тел принципиально невозможно определить какие из них находится «в движении», а какие «покоятся». Говорить о движении можно лишь относительно какой-либо системы отсчета. Законы механики выполняются одинаково во всех инерциальных системах отсчета, другими словами все они механически эквивалентны. Последнее следует из так называемых преобразований Галилея.[10]
Например, законы механики абсолютно одинаково выполняются в кузове грузовика, когда тот едет по прямому участку дороги с постоянной скоростью и когда стоит на месте. Человек может подбросить мячик вертикально вверх и поймать его через некоторое время на том же самом месте вне зависимости от того движется ли грузовик равномерно и прямолинейно или покоится. Для него мячик летит по прямой. Однако для стороннего наблюдателя, находящегося на земле, траектория движения мячика имеет вид параболы. Это связано с тем, что мячик относительно земли движется во время полета не только вертикально, но и горизонтально по инерции в сторону движения грузовика. Для человека, находящегося в кузове грузовика не имеет значения движется ли последний по дороге, или окружающий мир перемещается с постоянной скоростью в противоположном направлении, а грузовик стоит на месте. Таким образом, состояние покоя и равномерного прямолинейного движения физически неотличимы друг от друга.
Второй закон Ньютона
Второй закон Ньютона в современной формулировке звучит так: в инерциальной системе отсчета скорость изменения импульса материальной точки равна векторной сумме всех сил, действующих на эту точку.
где − импульс материальной точки, − суммарная сила, действующая на материальную точку. Второй закон Ньютона гласит, что действие несбалансированных сил приводит к изменению импульса материальной точки.[9]
По определению импульса:
где − масса, − скорость.
По правилу нахождения производной произведения:
Если масса материальной точки остается неизменной, то производная по времени от массы равна нулю, и уравнение принимает вид:
Учитывая определение ускорения точки, второй закон Ньютона принимает вид:
Считается, что это «вторая самая известная формула в физике»[11], хотя сам Ньютон никогда явным образом не записывал свой второй закон в этом виде.
Поскольку в любой инерциальной системе отсчёта ускорение тела одинаково и не меняется при переходе от одной системы к другой, то и сила инвариантна по отношению к такому переходу.
Во всех явлениях природы сила, независимо от своего происхождения, проявляется только в механическом смысле, то есть как причина нарушения равномерного и прямолинейного движения тела в инерциальной системе координат. Обратное утверждение, т.е установление факта такого движения, не свидетельствует об отсутствии действующих на тело сил, а лишь о том, что действия этих сил взаимно уравновешиваются. Иначе: их векторная сумма есть вектор с модулем, равным нулю. На этом основано измерение величины силы, когда она компенсируется силой, величина которой известна .
Второй закон Ньютона позволяет измерять величину силы. Например, знание массы планеты и ее центростремительного ускорения при движении по орбите позволяет вычислить величину силы гравитационного притяжения, действующую на эту планету со стороны Солнца.
Третий закон Ньютона
Для любых двух тел (назовем их тело 1 и тело 2) третий закон Ньютона утверждает, что сила действия тела 1 на тело 2, сопровождается появлением равной по модулю, но противоположной по направлению силы, действующей на тело 1 со стороны тела 2.[12] Математически закон записывается так:
Этот закон означает, что силы всегда возникают парами «действие-противодействие».[9] Если тело 1 и тело 2 находятся в одной системе, то суммарная сила в системе, обусловленная взаимодействием этих тел равна нулю:
Это означает, что в замкнутой системе не существует несбалансированных внутренних сил. Это приводит к тому, что центр масс замкнутой системы (то есть той, на которую не действуют внешние силы) не может двигаться с ускорением. Отдельные части системы могут ускоряться, но лишь таким образом, что система в целом остается в состоянии покоя или равномерного прямолинейного движения. Однако в том случае, если внешние силы подействуют на систему, то ее центр масс начнет двигаться с ускорением, пропорциональным внешней результирующей силе и обратно пропорциональным массе системы.[3]
Фундаментальные взаимодействия
Все силы в природе основаны на четырех типах фундаментальных взаимодействий. Максимальная скорость распространения всех видов взаимодействия равна скорости света в вакууме. Электромагнитные силы действуют между электрически заряженными телами, гравитационные − между массивными объектами. Сильное и слабое проявляются только на очень малых расстояниях, они ответственны за возникновение взаимодействия между субатомными частицами, включая нуклоны, из которых состоят атомные ядра.
Интенсивность сильного и слабого взаимодействия измеряется в единицах энергии (электрон-вольтах), а не единицах силы, и потому применение к ним термина «сила» объясняется берущей из античности традицией объяснять любые явления в окружаемом мире действием специфических для каждого явления «сил».
Понятие силы не может быть применено по отношению к явлениям субатомного мира. Это понятие из арсенала классической физики, ассоциирующейся (пусть даже только подсознательно) с ньютоновскими представлениями о силах, действующих на расстоянии. В субатомной физике таких сил уже нет: их заменяют взаимодействия между частицами, происходящими через посредство полей, то есть каких-то других частиц. Поэтому физики высоких энергий избегают употреблять слово сила, заменяя его словом взаимодействие.[13]
Каждый вид взаимодействия обусловлен обменом соответствующих переносчиков взаимодействия: гравитационное − обменом гравитонов (существование не подтверждено экспериментально), электромагнитное − виртуальных фотонов, слабое − векторных бозонов, сильное − глюонов (и на больших расстояниях — мезонов). В настоящее время электромагнитное и слабое взаимодействия объединены в более фундаментальное электрослабое взаимодействие. Делаются попытки объединения всех четырех фундаментальных взаимодействие в одно (так называемая теория великого объединения).
Всё многообразие проявляющих себя в природе сил в принципе может быть сведено к этим четырем фундаментальным взаимодействиям. Например, трение − это проявление электромагнитных сил, действующих между атомами двух соприкасающихся поверхностей, и принципа запрета Паули,[14] который не позволяет атомам проникать в область друг друга. Сила, возникающая при деформации пружины, описываемая законом Гука, также является результатом действия электромагнитных сил между частицами и принципа запрета Паули, заставляющих атомы кристаллической решетки вещества удерживаться около положения равновесия.[3].
Однако на практике оказывается не только нецелесообразной, но и просто невозможной по условиям задачи подобная детализация рассмотрения вопроса о действии сил.
Гравитация
Гравитация (сила тяготения) — универсальное взаимодействие между любыми видами материи. В рамках классической механики описывается законом всемирного тяготения, сформулированным Исааком Ньютоном в его труде «Математические начала натуральной философии». Ньютон получил величину ускорения, с которым Луна движется вокруг Земли, положив при расчете, что сила тяготения убывает обратно пропорционально квадрату расстояния от тяготеющего тела. Кроме этого, им же было установлено, что ускорение, обусловленное притяжением одного тела другим, пропорционально произведению масс этих тел[15]. На основании этих двух выводов был сформулирован закон тяготения: любые материальные частицы притягиваются по направлению друг к другу с силой , прямо пропорциональной произведению масс ( и ) и обратно пропорциональной квадрату расстояния между ними:
Здесь − гравитационная постоянная[16], значение которой впервые получил в своих опытах Генри Кавендиш. Используя данный закон, можно получить формулы для расчета силы тяготения тел произвольной формы. Теория тяготения Ньютона хорошо описывает движение планет Солнечной системы и многих других небесных тел. Однако, в ее основе лежит концепция дальнодействия, противоречащая теории относительности. Поэтому классическая теория тяготения неприменима для описания движения тел, перемещающихся со скоростью, близкой к скорости света, гравитационных полей чрезвычайно массивных объектов (например, черных дыр), а также переменных полей тяготения, создаваемых движущимися телами, на больших расстояниях от них[17].
Более общей теорией гравитации является общая теория относительности Альберта Эйнштейна. В ней гравитация не характеризуется инвариантной силой, не зависящей от системы отсчёта. Вместо этого свободное движение тел в гравитационном поле, воспринимаемое наблюдателем как движение по искривленным траекториям в трехмерном пространстве-времени с переменной скоростью, рассматривается как движение по инерции по геодезической линии в искривлённом четырехмерном пространстве-времени, в котором время в разных точках течет по-разному. Причем эта линия в некотором смысле «наиболее прямая» — она такова, что пространственно-временной промежуток (собственное время) между двумя пространственно-временными положениями данного тела максимален. Искривление пространства зависит от массы тел, а также от всех видов энергии, присутствующих в системе[3].
Электромагнитное взаимодействие
Электростатическое поле (поле неподвижных зарядов)
Развитие физики после Ньютона добавило к трём основным (длина, масса, время) величинам электрический заряд с размерностью C. Однако, исходя из требований практики, основанных на удобствах измерения, вместо заряда нередко стал использоваться электрический ток с размерностью I, причём I = CT − 1. Единицей измерения величины заряда является кулон, а силы тока ампер.
Поскольку заряд, как таковой, не существует независимо от несущего его тела, то электрическое взаимодействие тел проявляется в виде той же рассматриваемой в механике силы, служащей причиной ускорения. Применительно к электростатическому взаимодействию двух «точечных зарядов» в вакууме используется закон Кулона:
где — расстояние между зарядами, а ε0 ≈ 8.854187817·10−12 Ф/м. В однородном (изотропном) веществе в этой системе сила взаимодействия уменьшается в ε раз, где ε — диэлектрическая постоянная среды.
Направление силы совпадает с линией, соединяющей точечные заряды. Графически электростатическое поле принято изображать в виде картины силовых линий, представляющих собой воображаемые траектории, по которым бы перемещалась лишённая массы заряжённая частица. Эти линии начинаются на одном и заканчиваются на другом зарядах.
Электромагнитное поле (поле постоянных токов)
Существование магнитного поля признавалось ещё в средние века китайцами, использовавшим «любящий камень» — магнит, в качестве прообраза магнитного компаса. Графически магнитное поле принято изображать в виде замкнутых силовых линий, густота которых (так же, как и в случае электростатического поля) определяет его интенсивность. Исторически наглядным способом визуализации магнитного поля были железные опилки, насыпаемые, например, на лист бумаги, положенный на магнит.
Эрстед установил, что текущий по проводнику ток вызывает отклонение магнитной стрелки.
Фарадей пришёл к выводу, что вокруг проводника с током создаётся магнитное поле.
Ампер высказал гипотезу, признаваемую в физике, как модель процесса возникновения магнитного поля, заключающуюся в существовании в материалах микроскопических замкнутых токов, обеспечивающих совместно эффект естественного или наведённого магнетизма.
Ампером было установлено, что в находящейся в вакууме системе отсчёта, по отношению к которой заряд находится в движении, то есть ведёт себя как электрический ток, возникает магнитное поле, интенсивность которого определяется вектором магнитной индукции, лежащим в плоскости, расположенной перпендикулярно по отношению к направлению движения заряда.
Единицей измерения магнитной индукции является тесла: 1 Тл = 1 Т кг с−2 А−2
Количественно задача была решена Ампером, измерявшим силу взаимодействия двух параллельных проводников с текущими по ним токами. Один из проводников создавал вокруг себя магнитное поле, второй реагировал на это поле сближением или удалением с поддающейся измерению силой, зная которую и величину силы тока можно было определить модуль вектора магнитной индукции.
Силовое взаимодействие между электрическими зарядами, не находящимися в движении относительно друг друга описывается законом Кулона. Однако заряды, находящиеся в движении относительно друг друга создают магнитные поля, посредством которых созданные движением зарядов токов в общем случае приходят в состояние силового взаимодействия.
Принципиальным отличием силы, возникающей при относительном движении зарядов от случая их стационарного размещения, является различие в геометрии этих сил. Для случая электростатики сил взаимодействия двух зарядов направлена по линии, их соединяющей. Поэтому геометрия задачи двумерна и рассмотрение ведётся в плоскости, проходящей через эту линию.
В случае токов сила, характеризующая магнитное поле, создаваемое током, расположена в плоскости, перпендикулярной току. Поэтому картина явления становится трёхмерной. Магнитное поле, создаваемое бесконечно малым по длине элементом первого тока, взаимодействуя с таким же элементом второго тока, в общем случае создаёт силу, действующую на него. При этом для обоих токов эта картина полностью симметрична в том смысле, что нумерация токов произвольна.
Закон взаимодействия токов используется для эталонирования постоянного электрического тока.
Сильное взаимодействие
Сильное взаимодействие — короткодействующие силы между адронами и кварками. В атомном ядре сильное взаимодействие удерживает вместе положительно заряженные (испытывающие электростатическое отталкивание) протоны, происходит это посредством обмена пи-мезонами между нуклонами (протонами и нейтронами). Пи-мезоны живут очень мало, времени жизни им хватает лишь на то, чтобы обеспечить ядерные силы в радиусе ядра, потому ядерные силы называют короткодействующими. Увеличение количества нейтронов «разбавляет» ядро, уменьшая электростатические силы и увеличивая ядерные, но при большом количестве нейтронов они сами, будучи фермионами, начинают испытывать отталкивание вследствие принципа Паули. Также при слишком сильном сближении нуклонов начинается обмен W-бозонами, вызывающее отталкивание, благодаря этому атомные ядра не «схлопываются».
Внутри самих адронов сильное взаимодействие удерживает вместе кварки — составные части адронов. Квантами сильного поля являются глюоны. Каждый кварк имеет один из трёх «цветовых» зарядов, каждый глюон состоит из пары «цвет»-«антицвет». Глюоны связывают кварки в т. н. «конфайнмент», из-за которого на данный момент свободные кварки в эксперименте не наблюдались. При отдалении кварков друг от друга энергия глюонных связей возрастает, а не уменьшается как при ядерном взаимодействии. Затратив много энергии (столкнув адроны в ускорителе) можно разорвать кварк-глюонную связь, но при этом происходит выброс струи новых адронов. Впрочем, свободные кварки могут существовать в космосе: если какому-то кварку удалось избежать конфайнмента во время Большого взрыва, то вероятность аннигилировать с соответствующим антикварком или превратиться в бесцветный адрон для такого кварка исчезающе мала.
Слабое взаимодействие
Слабое взаимодействие — фундаментальное короткодействующее взаимодействие. Радиус действия 10−18 м. Симметрично относительно комбинации пространственной инверсии и зарядового сопряжения. В слабом взаимодействии участвуют все фундаментальные фермионы (лептоны и кварки). Это единственное взаимодействие, в котором участвуют нейтрино (не считая гравитации, пренебрежимо малой в лабораторных условиях), чем объясняется колоссальная проникающая способность этих частиц. Слабое взаимодействие позволяет лептонам, кваркам и их античастицам обмениваться энергией, массой, электрическим зарядом и квантовыми числами — то есть превращаться друг в друга. Одно из проявлений — бета-распад.
Производные виды сил
Сила упругости — сила, возникающая при деформации тела и противодействующая этой деформации. В случае упругих деформаций является потенциальной. Сила упругости имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Сила упругости направлена противоположно смещению, перпендикулярно поверхности. Вектор силы противоположен направлению смещения молекул.
Сила трения — сила, возникающая при относительном движении твёрдых тел и противодействующая этому движению. Относится к диссипативным силам. Сила трения имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Вектор силы трения направлен противоположно вектору скорости.
Сила сопротивления среды — сила, возникающая при движении твёрдого тела в жидкой или газообразной среде. Относится к диссипативным силам. Сила сопротивления имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Вектор силы сопротивления направлен противоположно вектору скорости.
Сила нормальной реакции опоры — сила упругости, действующая со стороны опоры на тело. Направлена перпендикулярно к поверхности опоры.
Силы поверхностного натяжения — силы, возникающие на поверхности фазового раздела. Имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Сила натяжения направлена по касательной к поверхности раздела фаз; возникает вследствие нескомпенсированного притяжения молекул, находящихся на границе раздела фаз, молекулами, находящимися не на границе раздела фаз.
Осмотическое давление
Силы Ван-дер-Ваальса — электромагнитные межмолекулярные силы, возникающие при поляризации молекул и образовании диполей. Ван-дер-Ваальсовы силы быстро убывают с увеличением расстояния.
Сила инерции — фиктивная сила, вводимая в неинерциальных системах отсчёта для того, чтобы в них выполнялся второй закон Ньютона. В частности, в системе отсчёта, связанной с равноускоренно движущимся телом сила инерции направлена противоположно ускорению. Из полной силы инерции могут быть для удобства выделены центробежная сила и сила Кориолиса.
Равнодействующая
При расчёте ускорения тела все действующие на него силы заменяют одной силой, называемой равнодействующей. Это геометрическая сумма всех сил, действующих на тело. При этом действие каждой силы не зависит от действия других, то есть каждая сила сообщает телу такое ускорение, какое она сообщила бы в отсутствие действия других сил. Это утверждение носит название принципа независимости действия сил (принцип суперпозиции).
См. также
Источники
Примечания
- ↑ Glossary. Earth Observatory. NASA. — «Сила — любой внешний фактор, который вызывает изменение в движении свободного тела или возникновение внутренних напряжений в зафиксированном теле.» (англ.)
- ↑ Бронштейн И. Н. Семендяев К. А. Справочник по математике. М.: Издательство «Наука» Редакция справочной физико-математической литературы.1964.
- ↑ 1 2 3 4 5 Feynman, R. P., Leighton, R. B., Sands, M. Lectures on Physics, Vol 1 — Addison-Wesley, 1963. (англ.)
- ↑ Kleppner, D., Kolenkow, R. J. An introduction to mechanics — McGraw-Hill. (англ.)
- ↑ 1 2 3 University Physics, Sears, Young & Zemansky, pp. 18-38 (англ.)
- ↑ Хайкин С. Э.Силы инерции и невесомость. Изд-во «Наука» М.,1967, с илл.
- ↑ Weinberg, S. Dreams of a Final Theory — Vintage Books USA, 1994. — ISBN 0-679-74408-8. (англ.)
- ↑ Heath,T.L. The Works of Archimedes (1897). Archive.org. Архивировано из первоисточника 23 августа 2011. Проверено 14 октября 2007. (англ.)
- ↑ 1 2 3 4 Newton, I. The Principia Mathematical Principles of Natural Philosophy — University of California Press, 1999. — ISBN 0-520-08817-4. (англ.)
- ↑ Мултановский В. В. Курс теоретической физики. Классическая механика. Основы специальной теории относительности. Релятивистская механика — М.: Просвещение, 1988. — С. 80−81.
- ↑ Принято не подчёркивать специально, что в такой формулировке Второй закон Ньютона годится только для наблюдателя, имеющего достаточные основания считать, что он находится в инерциальной системе отсчёта, из которой он и наблюдает движущееся под действием силы тело. Если же он сам находится в системе отсчёта, связанной с ускоряемым телом, в которой оно для него неподвижно, то в этой ситуации Второй закон Ньютона принимает вид: F − ma = 0 . Или F − F(i) = 0 , где F(i) есть сила инерции, действующей на ускоряемое тело, уравновешивающая по Третьему закону Ньютона действующее на него силу, что является причиной неподвижности этого тела в рассматриваемой неинерциальной системе отсчёта. Сила инерции фиктивна в том смысле, что причиной её возникновения не являются, в конечном итоге, ни силы гравитации, ни силы электромагнитного происхождения. Она появляется исключительно из-за неинерциальности движения системы наблюдателя.
- ↑ Henderson, Tom Lesson 4: Newton’s Third Law of Motion. The Physics Classroom (1996-2007). Архивировано из первоисточника 23 августа 2011. Проверено 4 января 2008. (англ.)
- ↑ Капра, Фритьоф ДАО ФИЗИКИ. СПб.,»ОРИС»*»ЯНА-ПРИНТ». 1994 г. 304 с. ISBN 5-88436-021-5
- ↑ Nave, R Pauli Exclusion Principle. HyperPhysics***** Quantum Physics. Архивировано из первоисточника 23 августа 2011. Проверено 2 января 2008. (англ.)
- ↑ University Physics, Sears, Young & Zemansky, pp. 59−82 (англ.)
- ↑ Sir Isaac Newton: The Universal Law of Gravitation. Astronomy 161 The Solar System. Архивировано из первоисточника 23 августа 2011. Проверено 4 января 2008. (англ.)
- ↑ Статья И. Д. Новикова Физический энциклопедический словарь — М.: Советская энциклопедия, 1984. — С. 772−775.