


Управление шаговым двигателем с помощью микроконтроллера PIC16f84
Системы, осуществляющие управление шаговым двигателем, как правило, имеют регистры сдвига, создающие нужную очередность управляющих импульсов, идущих на обмотки шагового двигателя.
Ниже приведена схема управление шаговым двигателем на микроконтроллере, позволяющая менять скорость вращения вала и выбирать направление его вращения. С устройством и принципом работы шагового двигателя можно ознакомится здесь.
Описание управления шаговым двигателем на PIC16F84
Частота работы микроконтроллера задается внешним генератором (кварц на 4 МГц). На радиоэлементах R1 – R3, С1 и транзисторе VT1 построен генератор прямоугольных импульсов, частоту которого возможно плавно менять потенциометром R2.
Напряжение с емкости С1 идет на ввод RB5 микроконтроллера PIC16F184. После того как потенциал станет выше порогового значения, на выходе RB7 возникает высокий потенциал. Вследствие этого транзистор VT1 открывается и разряжает емкость, в след за этим цикл повторяется.
При вращении движка потенциометра R2 из одного крайнего положения в другое, скорость вращения шагового двигателя меняется от 27 до 128 оборотов в минуту. Необходимо заметить, что при повышении скорости вращения, уменьшается крутящий момент на валу шагового двигателя. Данная схема не обладает ОС, в связи с этим скорость вращения зависит как от сопротивления потенциометра R2, так и от нагрузки на вал.
Обмотки двигателя коммутируются через транзисторные ключи VT2-VT5. Для защиты транзисторов от всплеска самоиндукции, в схему добавлены диоды VD1 — VD4. Изменение направления вращения и остановка осуществляется с помощью кнопок SA1 — SA3. Запитать данную схему можно от лабораторного источника питания.
Транзистор 2SC1815 — любым марки КТ3102. Стабилизатор напряжения 78L05 и 7805 возможно заменить на КР142ЕН5А (В). Транзисторы VT2-VT5 обязаны выдерживать ток, протекающий по обмоткам двигателя.
Скачать прошивку (1,0 MiB, скачано: 4 099)
Микроконтроллерное управление шаговым двигателем | Уголок радиолюбителя
С помощью этой схемы можно управлять двумя биполярными шаговыми двигателями в полном пошаговом режиме через последовательный порт RS232 компьютера. Программа терминал, такая как Hyperterminal может быть использована для управления шаговыми двигателями. Шаговые двигатели могут управляться каждый в отдельности.
Программа терминал, такая как Hyperterminal может быть использована для управления шаговыми двигателями. Шаговые двигатели могут управляться каждый в отдельности.
Блок питания 0…30 В / 3A
Набор для сборки регулируемого блока питания…
Особенности микроконтроллерного управление шаговым двигателем
- Два драйвера биполярного шагового двигателя в полном пошаговом режиме;
- Выполнение команд через последовательный порт компьютера;
- Может использоваться с любой операционной системой компьютера, которая имеет стандартную программу терминала, например Hyperterminal;
- Возможно применить шаговые двигателей со следующими техническими характеристиками: 24 В, 500 мА:
- Питание: постоянное напряжение 12-24 вольт.
Аппаратные средства
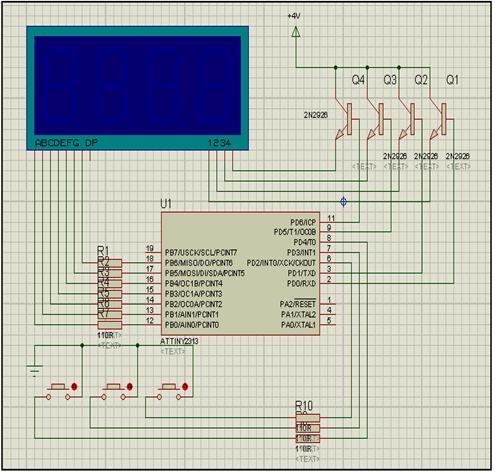
Микросхема MAX232 используется для преобразования сигналов с последовательным портом компьютера на уровне TTL с AVR микроконтроллером. Attiny2313 микроконтроллер обрабатывает сигналы последовательного порта и переводит эти сигналы для управления обмотками шагового двигателя.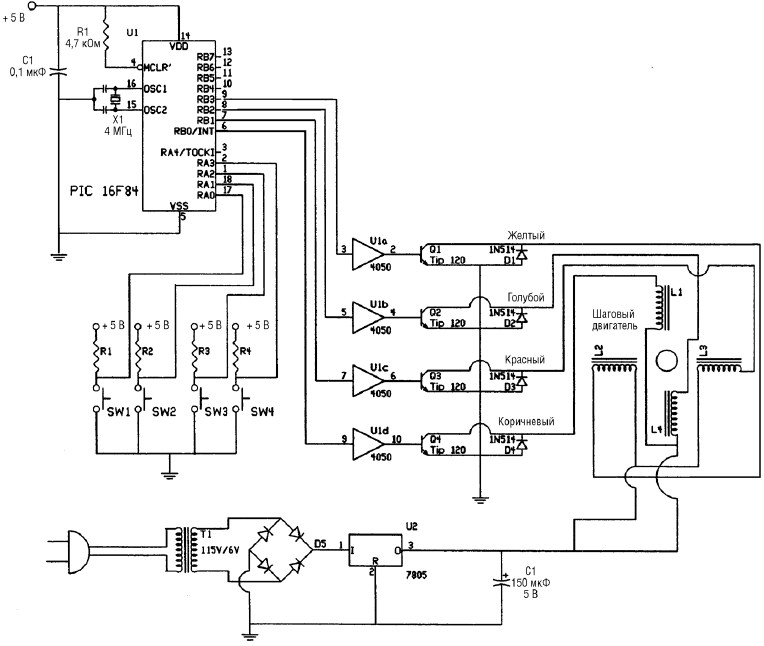
Сигналы от Attiny2313 усиливаются интегральной микросхемой ULN2803A которая является сборкой Дарлингтона, который может управлять нагрузкой до 500 мА. Входы данной сборки согласуются с уровнями ТТЛ уровень, нагрузку на выходе выдерживает до 30 В постоянного тока.
Шаговый двигатель управляется в полном пошаговом режиме. Для каждого шага одновременно две обмотки находятся под напряжением. Направление вращения двигателя может быть прямым и реверсивным, путем отправки соответствующей команды с терминальной программы. Возможный максимум шагов равняется 32000.
скачать файлы к схеме управление шаговым двигателем (68,6 KiB, скачано: 835)
www.avrprojects.net
Паяльный фен YIHUA 8858
Обновленная версия, мощность: 600 Вт, расход воздуха: 240 л/час…
Кихтенко Д.А. Управление шаговыми двигателями в микрошаговом режиме, оп-тимизация управления.
УДК 681-1
УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
В МИКРОШАГОВОМ РЕЖИМЕ, ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
Кихтенко Д.
Шаговые двигатели уже давно и успешно применяются в самых разнообразных устройствах. Их можно встретить в дисководах, принтерах, плоттерах, сканерах, факсах, а также в разнообразном промышленном и специальном оборудовании. В настоящее время выпускается множество различных типов шаговых двигателей способных удовлетворить любые запросы.
Одним из главных преимуществ шаговых
двигателей является возможность осуществлять точное позиционирование и регулировку
скорости без датчика связи. Однако это подходит только для систем, которые
работают при малом ускорении и с относительно постоянной нагрузкой. В то же
время системы с обратной связью способны работать с большими ускорениями и даже
при переменном характере нагрузки. Если нагрузка шагового двигателя превысит
его момент, то информация о положении ротора теряется и система требует
базирования с помощью, например, концевого выключателя или другого датчика.
Системы с обратной связью не имеют подобного недостатка [1].
Так как при работе шагового двигателя без обратной связи возможна потеря контроля положения (потеря шагов), на практике при осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия. Избавится от этих явлений можно путем использования обратной связи и микрошагового режима. На рис.1 показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
Рис.1 Перемещения ротора в полношаговом и микрошаговом режимах.
Микрошаговый режим обеспечивается путем
получения поля статора, вращающегося более плавно, чем в полно — или
полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически
бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага
способен обеспечить более точное позиционирование. Микрошаговые режимы бывают
от 1/3 полного шага до 1/32 и даже меньше, наиболее часто используют 1/4, 1/8,
1/16, 1/32 [1,4].
Рис.2. Зависимость момента от угла поворота ротора в случае
разных значений тока фаз.
Чтобы получить нужное направление магнитного поля, необходимо выбрать правильное направление токов в катушках и правильное соотношение этих токов (рис. 2), результирующий момент будет
Th=(a2+b2)0.5, (1)
а точка равновесия ротора сместится в точку
x=(S/(pi/2))arctan(b/a) (2)
где a и b – момент, создаваемый первой и второй фазой
соответственно,
Th – результирующий момент удержания,
x – положение равновесия ротора в радианах,
S – угол шага в радианах.
Данные формулы верны только в том
случае, если зависимость момента от угла поворота ротора синусоидальная и если
ни одна часть магнитной цепи двигателя не насыщается.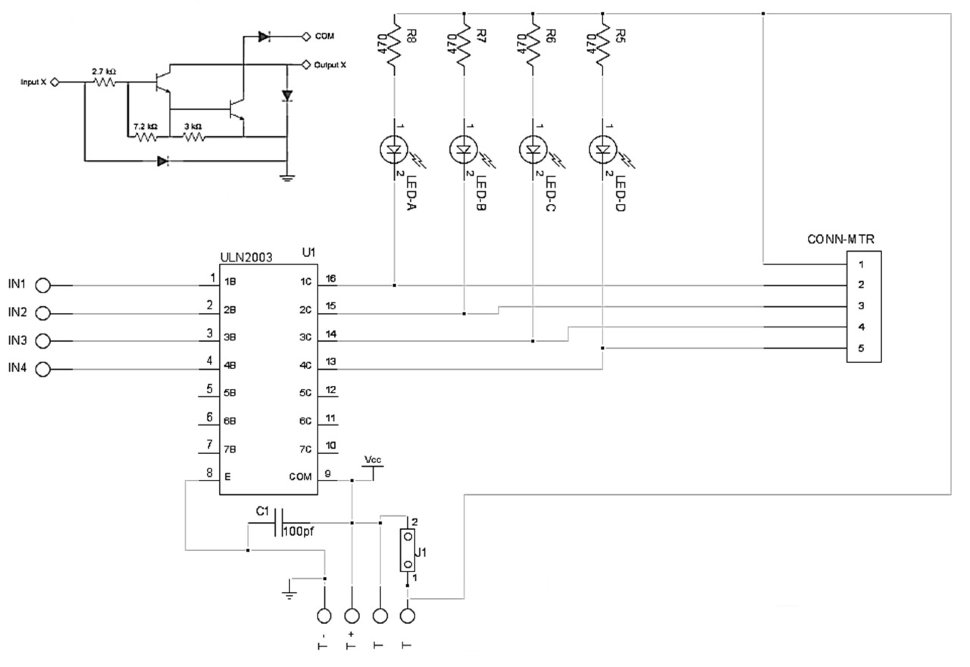
Точка равновесия смещается, следовательно, ротор можно зафиксировать в любой произвольной позиции. Для этого необходимо соответственно установить отношение токов в фазах, таким образом, происходит реализация микрошагового режима.
Результатом использования микрошагового режима является намного более плавное вращение ротора на низких частотах [1,4].
Современные микроконтроллеры, которые имеют встроенные ЦАП, можно использовать для реализации микрошагового режима вместо специальных контроллеров. Это позволяет сделать практически одинаковой стоимость оборудования для полношагового и микрошагового режимов.
Рис. 3. Схема ШИМ и формы кривых напряжения:
1 — нагрузка; 2 - токоизмерительный резистор; 3 — диод обратного тока
Управление с помощью широтно-импульсной
модуляции. Коммутатор с широтно-импульсной модуляцией (ШИМ) обеспечивает
стабилизацию тока с незначительными потерями. Основная функция ШИМ коммутатора
представлена на рис. 3 [1].
Основная функция ШИМ коммутатора
представлена на рис. 3 [1].
Рис. 4. Схема коммутатора типа ШИМ:
1 — циркуляционный ток после запирания VT1; 2 — датчик тока; 3 — ток после запирания VT4
Здесь индуктивная нагрузка, помещенная в пунктирный прямоугольник, представляет собой обычный коммутатор (рис. 4). Напряжение на датчике тока нагрузки сравнивается с эталонным, с помощью операционного усилителя с высоким коэффициентом усиления. Эталонное напряжение представляет собой сумму высокочастотной компоненты треугольной или синусоидальной формы и постоянной составляющей, с которой необходимо сравнить напряжение датчика.
Рис. 5 Прямоугольная форма напряжения и форма кривой тока
Если постоянная компонента эталонного
сигнала и напряжение датчика близки, то выходной сигнал усилителя будет иметь
прямоугольную форму, как показано для V0 на
рис. 5[1].
5[1].
Преимущества ШИМ или вибрационного управления заключается в единственном источнике питания, малых потерях мощности и автоматическом регулировании напряжения для управления при нормированном токе.
Для работы в прецизионных системах, где важным фактором является точность позиционирования целесообразно использовать гибридные шаговые двигатели. Наиболее распространенным гибридным шаговым двигателем является четырехфазный 200 – шаговый двигатель с углом шага 1.8°[1,4].
Рис. 6 Зависимости частоты вращения от положения:
а — удовлетворительная; б — неудовлетворительная; 1 — конечное положение
Задачи микроконтроллера. На рис. 6
показаны две зависимости частоты вращения от угла, построенные при управлении
ШД с обратной связью. На рис. 6 а показан пример, в котором ШД запускается с
требуемым углом коммутации, ускоряется при другом его значении и начинает торможение
в момент, с которого частота вращения быстро уменьшается и становится равной
нулю как раз в требуемом положении. Для запуска и ускорения использовали угол
коммутации более 1 шага, а для торможения нулевой или отрицательный. На рис. 6
б представлен неудачный пример управления. Торможение начинается тогда, когда
обнаружено конечное положение. Но двигатель не может остановится моментально и
будет вращаться по инерции. Для приведения ротора в нужное положение он должен
вращаться в обратном направлении с установлением соответствующего угла коммутации.
Зависимость частоты вращения от углового положения ротора может быть колебательной,
как показано на рис. 6 б [1,4].
Для запуска и ускорения использовали угол
коммутации более 1 шага, а для торможения нулевой или отрицательный. На рис. 6
б представлен неудачный пример управления. Торможение начинается тогда, когда
обнаружено конечное положение. Но двигатель не может остановится моментально и
будет вращаться по инерции. Для приведения ротора в нужное положение он должен
вращаться в обратном направлении с установлением соответствующего угла коммутации.
Зависимость частоты вращения от углового положения ротора может быть колебательной,
как показано на рис. 6 б [1,4].
Рис. 7 Система управления с логическим блоком, вынесенным за микроконтроллер:
1 — микропроцессор; 2- команды управления; 3 — Программа обучения и выполнения; 4 — монитор; 5 - коммутатор и логический блок; 6 — датчик положения ротора; 7 — шаговый двигатель; 8 — нагрузка
Микроконтроллерная система здесь
используется для определения наилучшего времени изменения углов коммутации.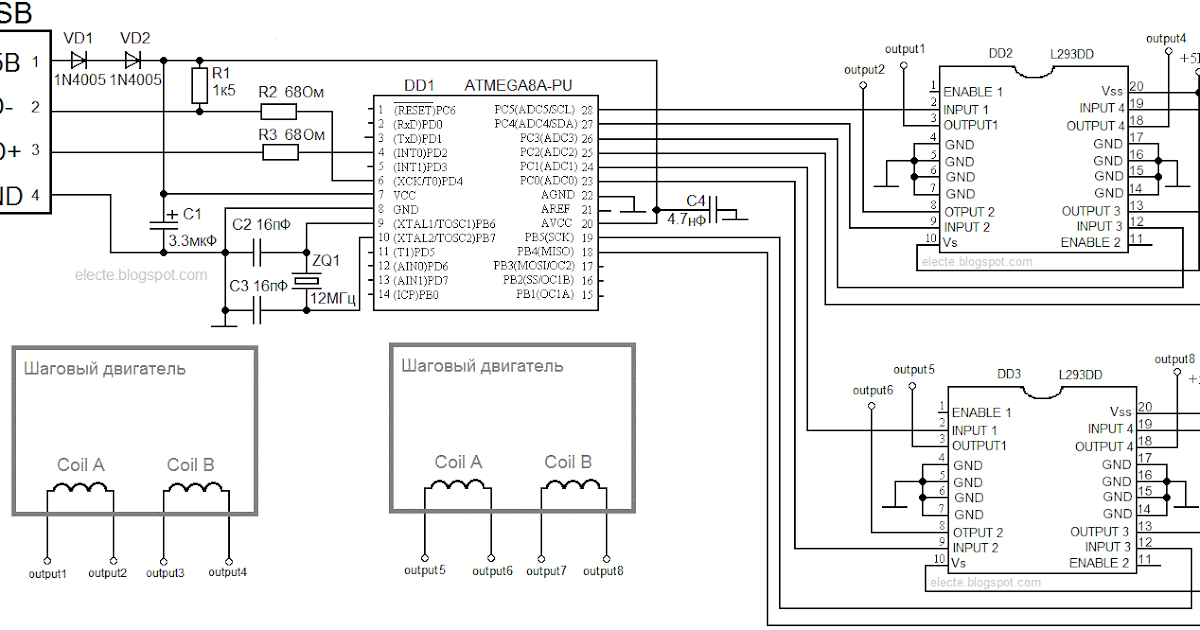 На
рис. 7 показана схема системы, в которой логический блок вынесен за
микроконтроллер. Сигнал позиционирования поступает в блок формирования сигнала,
который управляет движением ротора и обменивается информацией с микроконтроллером.
Сигнал позиционирования поступает в блок формирования сигнала, который
управляет движением ротора и обменивается информацией с микроконтроллером.
Математическое обеспечение должно быть организовано так, чтобы микроконтроллер
определял лучшее время для изменения углов коммутации, основываясь на
предыдущем опыте и текущих данных о положении и частоте вращения. Микроконтроллер,
в конечном счете, после нескольких итераций будет находить оптимальное время изменения
угла коммутаций [1,2].
На
рис. 7 показана схема системы, в которой логический блок вынесен за
микроконтроллер. Сигнал позиционирования поступает в блок формирования сигнала,
который управляет движением ротора и обменивается информацией с микроконтроллером.
Сигнал позиционирования поступает в блок формирования сигнала, который
управляет движением ротора и обменивается информацией с микроконтроллером.
Математическое обеспечение должно быть организовано так, чтобы микроконтроллер
определял лучшее время для изменения углов коммутации, основываясь на
предыдущем опыте и текущих данных о положении и частоте вращения. Микроконтроллер,
в конечном счете, после нескольких итераций будет находить оптимальное время изменения
угла коммутаций [1,2].
Наиболее характерным качеством
микроконтроллера является гибкость программирования. Преимущества
микроконтроллера состоит также в том, что он позволяет осуществлять генерацию
временных импульсов, управление логической последовательностью и выполнения
функций входного контроллера. Более сложные способы регулирования частоты
вращения могут быть реализованы при помощи программ для микроконтроллера [2,3].
Более сложные способы регулирования частоты
вращения могут быть реализованы при помощи программ для микроконтроллера [2,3].
При оптимизации работы в микрошаговом режиме системы управления можно использовать микроконтроллеры семейства PIC, ATMEL или другие с встроенным ЦАП.
Рис. 8 Процесс ШИМ – стабилизации тока
Управление шаговым двигателем осуществляется на основе широтно-импульсной модуляции, при помощи которой ЦАП формирует синусоидальное опорное напряжение, которое подается на схему управления, выполненную на полевых транзисторах, где сигналы усиливаются и подаются на обмотки двигателя. Рисунок 8 [1,4].
Рис. 9 Принципиальная схема контроллера
Выполнение шагов
контролируется при помощи обратной связи, которая реализована на датчиках тока
и компараторах. Датчики токов включаются в цепь истоков полевых транзисторов.
Сигналы, снятые с датчиков тока, поступают на входы компараторов, на вторые
входы компараторов подается опорное напряжение, сформированное микроконтроллером
которое и определяет пиковый ток в обмотках шагового двигателя. Выходы
компараторов подключаются к входам прерываний микроконтроллера. Рисунок 9 [2,3].
Датчики токов включаются в цепь истоков полевых транзисторов.
Сигналы, снятые с датчиков тока, поступают на входы компараторов, на вторые
входы компараторов подается опорное напряжение, сформированное микроконтроллером
которое и определяет пиковый ток в обмотках шагового двигателя. Выходы
компараторов подключаются к входам прерываний микроконтроллера. Рисунок 9 [2,3].
Основой устройства
является микроконтроллер DD1. Сигналы управления обмотками
двигателя формируются на портах РВ4 – РВ7. Для коммутации обмоток используются
полевые транзисторы типа КП 505А (VT1 – VT4), чтобы транзисторы оставались закрытыми во время
действия сигнала « сброс » микроконтроллера (порты в это время находятся в
высокоимпедансном состоянии), между затворами и истоками включены резисторы R11, R14, R17,
R18. Для ограничения тока перезарядки емкости затворов
установлены резисторы R3, R6, R7, R8. В данном контроллере
реализован медленный спад тока фаз, который обеспечивается шунтированием
обмоток двигателя диодами VD1 – VD4. Для подключения шагового двигателя имеется восьмиконтактный разъем ХР1, который
позволяет подключить двигатель, имеющий два отдельных вывода от каждой обмотки [1,4].
Для подключения шагового двигателя имеется восьмиконтактный разъем ХР1, который
позволяет подключить двигатель, имеющий два отдельных вывода от каждой обмотки [1,4].
Стабилизация тока
осуществляется с помощью ШИМ, которая реализована программно. Для этого
используются два датчика тока R15 и R16.
Сигналы, снятые с датчиков тока, через ФНЧ R12 C5 и R13 C6
поступают на входы компараторов DA1.1 и DA1.2. ФНЧ предотвращают ложные срабатывания компараторов
вследствии действия помех. На второй вход каждого компаратора подается опорное
напряжение, которое и определяет пиковый ток в обмотках двигателя. Это
напряжение формируется микроконтроллером. Для фильтрации сигнала ШИМ
используются двухзвенные ФНЧ R1C1R4C3 и R2C2R5C4.
Одновременно резисторы R1, R4, R9 и R2, R5, R10 образуют делители, которые задают масштаб регулировки
токов фаз. Выходы компараторов подключены к выходам прерываний
микроконтроллера INT 0 и INT
1. Алгоритм работы показан на рисунке 10. Основываясь на схеме стабилизации
тока, программно реализована система контроля выполнения шагов, алгоритм
подпрограммы изображен на рис. 11.
Алгоритм работы показан на рисунке 10. Основываясь на схеме стабилизации
тока, программно реализована система контроля выполнения шагов, алгоритм
подпрограммы изображен на рис. 11.
Подпрограмма выполняется непосредственно после проверки позиции, а также при переходе в микрошаговый режим. Таким образом, при проверке позиции происходит проверка всей системы в целом, в том числе и шагового двигателя. При переходе в микрошаговый режим производится контроль микрошагов, наличие потерянных шагов, при потере шага напряжение на входе компаратора не соответствует эталонному и подпрограмма дает команду на повтор шага. Если выполнение микрошага произошло в соответствии с программой, то выполняется следующий шаг, если второй раз произошла потеря шага то выдается команда STOP. В полношаговом и полушаговом режимах подпрограмма не используется.
Данная методика
предлагает вариант решения проблемы потери шагов при работе микроконтроллерной
системы на шаговых двигателях без использования дорогостоящих датчиков
положения.
|
Рис. 11 Алгоритм подпрограммы контроля выполнения шагов
It was offered the variant of realization of decision of problem of loss of steps when functioning (working) an microcontroller of system on crossbar engines without use the sensors of position, with the help of additional checking the steps in microsteps mode.
1.
Кенио Т. Шаговые двигатели и их микропроцессорные системы управления:
Пер.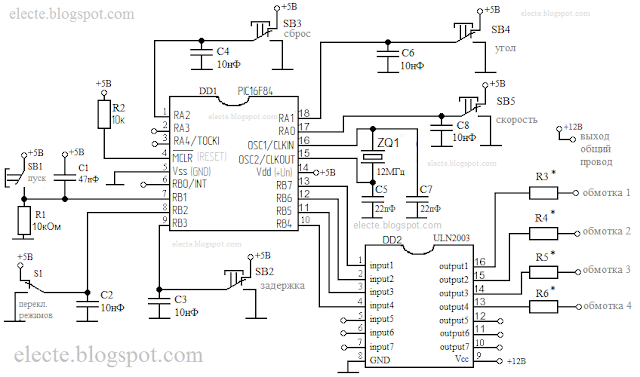 с англ. — М.: Энергоатомиздат, 1987. -200с.
с англ. — М.: Энергоатомиздат, 1987. -200с.
2. Микроконтроллеры. Выпуск 2. Однокристальные микроконтроллеры PIC12C5x, PIC12C6x, PIC16x8x, PIC1400, M16C/61/62. Перевод с англ. Б. Я. Прокопенко/Под ред. Б. Я. Прокопенко. — М.: ДОДЕКА. 2000. -336с.
3. On-line session on http://www.microchip.ru
4. On-line session on http://www.telesys.ru
Что такое микроконтроллер с шаговым двигателем?
Микроконтроллер с шаговым двигателем — это аппаратная часть, которая способна управлять шаговым двигателем, сообщая двигателю, сколько магнитных импульсов или шагов для вращения двигателя. Все шаговые двигатели нуждаются в каком-то блоке управления, и пользователи могут выбрать либо полноценный компьютер, либо микроконтроллер с шаговым двигателем. Использование микроконтроллера немного сложнее, потому что установка сложнее, но это также позволяет двигателю функционировать независимо от компьютера. Микроконтроллеры также потребляют значительно меньше энергии, чем компьютер, и такая низкая энергия может потребоваться в некоторых приложениях с шаговыми двигателями.
Микроконтроллеры также потребляют значительно меньше энергии, чем компьютер, и такая низкая энергия может потребоваться в некоторых приложениях с шаговыми двигателями.
Все шаговые двигатели управляются электрическими импульсами, что делает их чрезвычайно точными. В отличие от других двигателей, которые при вращении могут вращаться больше или меньше, чем необходимо, шаговый двигатель делит вращение на ступени. Контроллер, будь то компьютер или микроконтроллер, подает в шаговый двигатель инструкции, которые заставляют его двигаться только на указанное количество шагов.
Микроконтроллер с шаговым двигателем — это небольшая часть аппаратного обеспечения, в которую очень мало встроено. Обычно есть некоторая память и процессор, но этого недостаточно, чтобы он работал в одиночку. Это аппаратное обеспечение используется для встроенных приложений, для которых пользователь вводит программирование в микроконтроллер, а контроллер затем передает программирование в другое аппаратное обеспечение, такое как шаговый двигатель.
Для начала микроконтроллер с шаговым двигателем подключен к компьютеру. Затем пользователь компьютера записывает программирование для шагового двигателя, основываясь на скорости вращения двигателя и количестве шагов для его перемещения. После завершения программирования микроконтроллер встроен в шаговый двигатель.
Процесс встраивания может быть сложным для новых пользователей и тех, кто испытывает затруднения при чтении схем. Провода должны быть аккуратно и правильно привязаны к микроконтроллеру от шагового двигателя. Если провода установлены неправильно, двигатель не будет работать или может замкнуть накоротко.
Хотя использование микроконтроллера с шаговым двигателем занимает немного больше времени, оно дает некоторые преимущества по сравнению с использованием компьютера в качестве контроллера. Теперь двигатель можно использовать независимо от компьютера, поэтому пользователь может перемещаться вокруг двигателя и любых подключенных к нему устройств. Микроконтроллер потребляет меньше энергии, и, если приложение чувствительно к энергии, это поможет.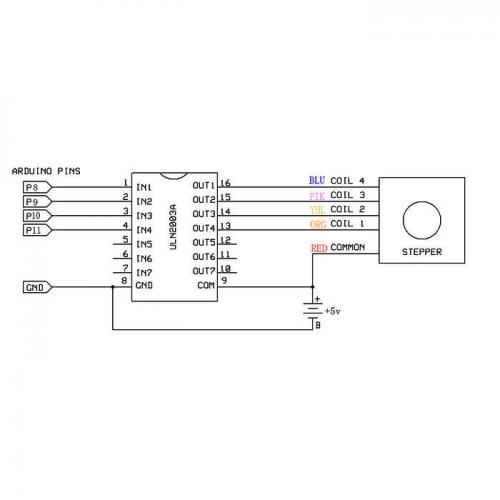 Микроконтроллеры также дешевле, чем другие контроллеры, что делает их лучше для любителей и для компаний, стремящихся сэкономить.
Микроконтроллеры также дешевле, чем другие контроллеры, что делает их лучше для любителей и для компаний, стремящихся сэкономить.
ДРУГИЕ ЯЗЫКИ
Крутим шаговый двигатель — Как подключить — AVR project.ru
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
В зависимости от от того как соединены средние обмотки внутри, из двигателя могут выходить 5 или 6 проводов. Разницы никакой нет, все равно средние выводы обмоток соединяются вместе. Характерной особенностью шаговых двигателей является дискретность поворота ротора, тоесть если взять и покрутить вал двигателя можно ощутить как он фиксируется в определенных моментах. Это и есть шаги двигателя. При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя.
Это и есть шаги двигателя. При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя.
Существует несколько алгоритмов управления питанием обмоток двигателя. Самым простым является полношаговое управление, когда в любой момент времени запитана только одна из половинок обмоток. Для наглядности накидал табличку показывающую последовательность включения обмоток:
Ротор при таком управлении принимает естественное положение относительно статора. Есть еще способ управления шаговиком в полношаговом режиме, когда одновременно запитываются две фазы, таким образом удается увеличить момент на валу на 40%.
Главным недостатком полношагового управления являются аццкие вибрации двигателя и малая дискретность шага, равная паспортному значению.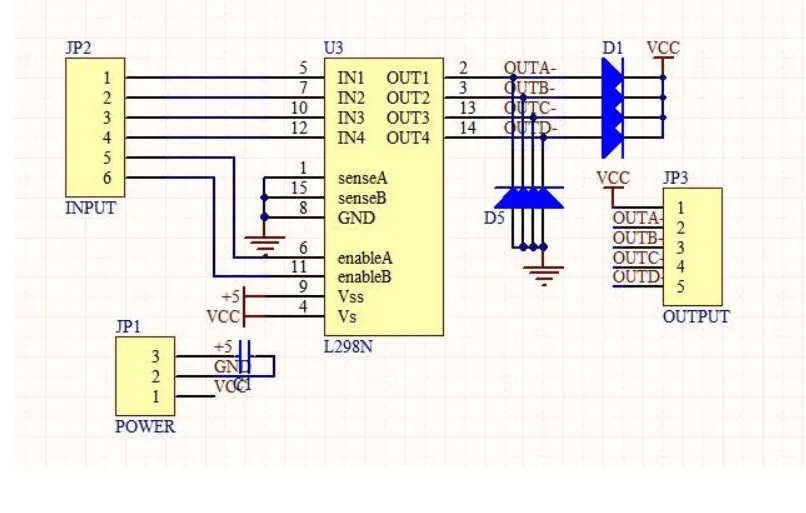
При такой работе вал двигателя за один цикл совершает половину шага и фиксируется между двумя естественными состояниями равновесия. Таким образом дискретность поворота вала увеличивается в 2 раза.
Есть еще способ увеличить дробленеи шага ротора двигателя — микрошаговое управление — когда обмотка не просто запитывается, а запитывается определенным током. И от отношения тока в соседних обмотках зависит положение ротора — чем больший ток течет в обмотке по отношению к соседней, тем ближе к ней смещается ротор и наоборот. Это позволяет увеличить дробление шага в десятки и сотни (!) раз.
С теорией немного разобрались, теперь нужно выбрать в каком режиме будет управляться двигатель. Полный шаг слишком убог и не эффективен, микрошаг сложен, да и нужен он в основном в управлении приводом высокоточного ЧПУ станка.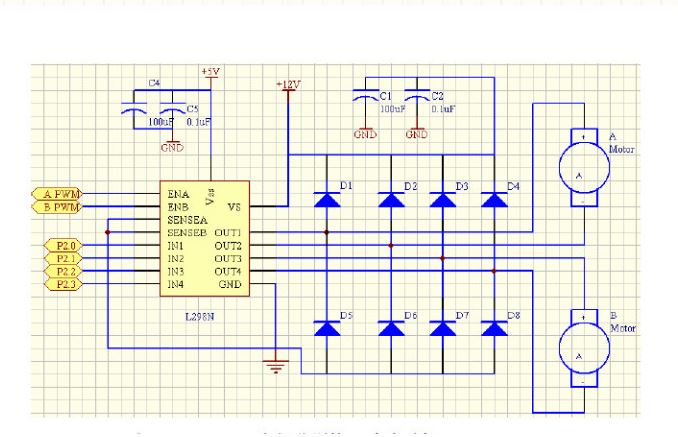 Поэтому крутить будем в полушаге 🙂
Поэтому крутить будем в полушаге 🙂
Схема базируется на микроконтроллере attiny2313 и имеет две кнопки. При нажатии на одну вал двигателя будет крутиться в одну сторону, при нажатии другой — в другую. В качестве ключевых транзисторов выбраны КТ829, способные протащить через себя до 8 Ампер.
К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка.
Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
Плата управления в сборе:
Красный светодиод загорается при нажатии одной из кнопок. Разъем подключения контроллера по UART сделал опционально, на случай если нужно будет приделать управление шаговиком с компа.
Разъем подключения контроллера по UART сделал опционально, на случай если нужно будет приделать управление шаговиком с компа.
Код в Bascom-AVR:
$regfile = «2313def.dat»
$crystal = 4000000
Dim S As Byte ‘эта переменная следит за номером шага двигателя
S = 1
On Int0 Knopka1 ‘даем имена обработчикам внешних прерываний
On Int1 Knopka2
Config Portb = Output ‘конфигурируем порт на выход
Config Portd.5 = Output ‘конфигурируем ногу для подключения светодиода
Led Alias Portd.5 ‘присваиваем имя LED выводу 5 порта D
‘прерывания будут генерироваться пока на ноге низкий уровень, то есть пока кнопка будет нажата
Config Int0 = Low Level
Config Int1 = Low Level
‘разрешаем прерывания
Enable Interrupts
Enable Int0
Enable Int1
‘основной цикл программы, просто ждем прерывания
Do
Loop
Knopka1: ‘обработчик прерывания первой кнопки
Led = 1 ‘зажигаем светодиод
Incr S ‘увеличим номер шага
If S = 9 Then ‘максимально возможный номер шага = 8
S = 1
End If
Select Case S ‘выбираем какие обмотки включать в зависимости от номера шага
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000 ‘задержка между шагами
Led = 0 ‘гасим светодиод
Return
Knopka2: ‘обработчик прерывания второй кнопки
Led = 1 ‘зажигаем светодиод
Decr S ‘тут все тоже самое, только в обратном направлении
If S = 0 Then ‘минимально возможный номер шага = 1
S = 8
End If
Select Case S
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000
Led = 0 ‘гасим светодиод
Return
End
Изменяя величину задержки между шагами, можно в больших пределах регулировать скорость вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
Скачать файлы к проекту
UPD: Здесь допилил программу, теперь стало возможным управление шаговым двигателем с компьютера.
Запускаем шаговый двигатель с помощью мк AVR — Разное — Микроконтроллеры — Каталог статей
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели.Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.В зависимости от от того как соединены средние обмотки внутри, из двигателя могут выходить 5 или 6 проводов. Разницы никакой нет, все равно средние выводы обмоток соединяются вместе, ниже на фотографии разобран двигатель марки 17PM-H005-P2VA.

Характерной особенностью шаговых двигателей является дискретность поворота ротора, тоесть если взять и покрутить вал двигателя можно ощутить как он фиксируется в определенных моментах. Это и есть шаги двигателя.
При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя. Схема контроллера ШД:
Схема собрана на микроконтроллере ATtiny2313 и имеет две кнопки, при нажатии на одну вал двигателя будет крутиться в одну сторону, при нажатии другой — в другую. Красный светодиод загорается при нажатии одной из кнопок. В качестве ключевых транзисторов выбраны КТ829, их можно заменить на КТ972 — правда эти слабее и будут греться сильнее.
К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток.
 Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка. Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка. Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.Изменяя величину задержки между шагами, можно в больших пределах регулировать скорость вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
По материалам сайта avrproject.ru
Скачать файлы проекта и файл печатной платы.
Скачать видео с демонстрацией работы схемы (~0.7мб).
Контроллер шагового двигателя — RadioRadar
В радиолюбительской литературе было опубликовано много описаний устройств управления шаговыми двигателями, я решил предложить ещё одно, имеющее ряд отличий и достоинств. Предлагаемый контроллер биполярного шагового двигателя построен из небольшого числа легкодоступных дешёвых деталей, имеет маленький потребляемый ток и может быть адаптирован для применения в различных устройствах.
Предлагаемый контроллер биполярного шагового двигателя построен из небольшого числа легкодоступных дешёвых деталей, имеет маленький потребляемый ток и может быть адаптирован для применения в различных устройствах.
Применение двухполярного питания выходных электронных ключей дало возможность вдвое уменьшить их число и получить режим остановки двигателя, в котором через его обмотки не течёт ток. Управляющая программа обеспечивает фиксированную длительность рабочих импульсов при любой частоте шагов, что избавило ключевые транзисторы от излишнего нагрева. Использование для управления ключами оптронов даёт развязку по питанию, возможность независимого питания узла управления и ключей, коммутирующих обмотки двигателя.
Схема контроллера изображена на рис. 1. Узел управления построен на микроконтроллере DD1 (PIC16F84A-04/P). Назначение кнопок управления следующее: SB1 — вращение по часовой стрелке; SB2 — вращение против часовой стрелки; SB3 — увеличение частоты шагов; SB4 — уменьшение частоты шагов; SB5 — стоп. Значения напряжения питания шагового двигателя +Uшд и -Uшд зависят от его типа, но не должны по абсолютному значению превышать 27 В — половины допустимого для фототранзисторов применённых оптронов напряжения коллектор-эмиттер.
Значения напряжения питания шагового двигателя +Uшд и -Uшд зависят от его типа, но не должны по абсолютному значению превышать 27 В — половины допустимого для фототранзисторов применённых оптронов напряжения коллектор-эмиттер.
Рис. 1. Схема контроллера
Чертёж печатной платы устройства и размещение деталей на ней показаны на рис. 2. Для микроконтроллера на плате устанавливают панель, в которую его вставляют уже запрограммированным.
Рис. 2. Чертёж печатной платы контроллера и размещение деталей на ней
Исходный текст программы микроконтроллера содержит все необходимые комментарии, и при необходимости её можно изменять, например, ввести полушаговый режим управления двигателем или, используя свободные порты микроконтроллера, добавить конечные выключатели для ограничения сектора вращения, или задавать нужное число шагов. Стоит отметить, что необходимая очерёдность открывания транзисторов VT1-VT4 реализована в программе с учётом трассировки печатной платы.
Правильно собранное устройство не требует налаживания. В нём в качестве VT1-VT4 можно использовать любые комплементарные пары транзисторов средней мощности, например, серий КТ814 и КТ815, КТ816 и КТ817, КТ972 и КТ973 или аналогичные импортные. Подходящие транзисторные оптроны можно найти в любом импульсном блоке питания, где их широко используют.
Файл печатной платы в формате Sprint Layout 6.0 и программа микроконтроллера можно скачать здесь.
Автор: Н. Каменев, г. Москва
Разработка системы управления шаговым двигателем на базе микроконтроллера AT89C51
% PDF-1.4 % 1 0 объект > эндобдж 7 0 объект > эндобдж 2 0 obj > эндобдж 3 0 obj > транслировать application / pdfdoi: 10.1016 / j.proeng.2011.08.426
 DOI: 10.1016 / j.proeng.2011.08.426
DOI: 10.1016 / j.proeng.2011.08.426 F; oRk6G? +}; Ztqyu ױ. \] P (o / w7 ߗ_ v ۯ y {{}
puXj # Hnuq & q & (L? r_D3 & =, (U% ~} 8 N = ,! ׯ N @ Ƀŭ
hfinu \. ‘5
F; oRk6G? +}; Ztqyu ױ. \] P (o / w7 ߗ_ v ۯ y {{}
puXj # Hnuq & q & (L? r_D3 & =, (U% ~} 8 N = ,! ׯ N @ Ƀŭ
hfinu \. ‘5Запускайте шаговый двигатель без микроконтроллера!
В одном из моих предыдущих руководств я показал вам, как управлять скоростью шагового двигателя с помощью таймера 555 . Этот проект является обновлением этого проекта, и вы узнаете, как управлять направлением двигателя с помощью еще одной микросхемы таймера 555. Итак, без лишних слов, приступим!
Шаг 1. Получите все необходимое!Вот что вам понадобится:
Драйвер шагового двигателя A4988
2 555 микросхем таймера
Прототип макетной платы
Источник питания 12 В
Источник питания 5 В (Вы также можете использовать стабилизатор напряжения с выходом 5 В, например LC805CV)
Резистор 1 кОм
2 резистора 10 кОм
3 светодиода (опционально)
3 резистора 330 Ом (опционально, для светодиодов)
А конденсатор (0. От 3 мкФ до 10 мкФ, попробуйте поэкспериментировать с разными конденсаторами в этом диапазоне. Конденсаторы выше этого диапазона заставят шаговый двигатель двигаться очень медленно, а конденсаторы ниже этого диапазона не позволят двигателю двигаться вообще. Убедитесь, что конденсаторы рассчитаны на напряжение выше 10 В.)
От 3 мкФ до 10 мкФ, попробуйте поэкспериментировать с разными конденсаторами в этом диапазоне. Конденсаторы выше этого диапазона заставят шаговый двигатель двигаться очень медленно, а конденсаторы ниже этого диапазона не позволят двигателю двигаться вообще. Убедитесь, что конденсаторы рассчитаны на напряжение выше 10 В.)
Потенциометр 100 кОм
2 кнопки (нормально разомкнутые)
Множество перемычек «папа-вилка»
Шаг 2: Начните с подключения A4988 Драйвер двигателя на макетной платеПосле подключения драйвера двигателя, подключите вывод VDD (или VCC) к + 5vols, GND к, очевидно, GND и VMOT к 12 вольт. Не забудьте соединить контакты SLP и RST вместе! Я использовал для этого небольшой джемпер.
Шаг 3. Получите помощь от принципиальной схемыПожалуйста, перейдите к следующему шагу перед тем, как начинать подключение.
Шаг 4: Подключите и проверьте регулятор скорости Установите и подключите только регулятор скорости. Подключите вывод DIR драйвера двигателя к GND или +5 вольт во время тестирования. Включите вашу схему и проверьте, правильно ли она работает. Если есть какая-либо проблема, поиск и устранение неисправностей будет проще, чем после подключения контроллера направления.
Подключите вывод DIR драйвера двигателя к GND или +5 вольт во время тестирования. Включите вашу схему и проверьте, правильно ли она работает. Если есть какая-либо проблема, поиск и устранение неисправностей будет проще, чем после подключения контроллера направления.
Надеюсь, вам понравился этот проект. Хотелось бы увидеть, что вы построили. Предложения приветствуются!
Биполярный шаговый двигатель — обзор
зона нечувствительности : зона между вращением по часовой стрелке и против часовой стрелки, в пределах которой ротор SM, находящегося под напряжением, может оставаться неподвижным
перерегулирование : — максимальная величина превышения положения ступеньки
фаза : часть обмотки между линией питания и точкой отвода (униполярного SM) или между двумя линиями питания (в случае биполярный шаговый двигатель)
удерживающий крутящий момент : максимальный крутящий момент, который может быть приложен к валу ротора без его начала непрерывного вращения при включенном двигателе и управлении нулевым шагом
фиксация крутящий момент : (остаточный крутящий момент) максимальный крутящий момент обесточенного двигателя, который может быть приложен к валу без того, чтобы он начал непрерывно вращаться
время установления : общее время между подачей сигнала изменения шага и временем, которое требуется валу двигателя для стабилизации на этом новом значении шага
максимальная скорость нарастания : составляет максимальная схема переключения, при которой ненагруженный SM может оставаться синхронным
режим : определенная схема включения различных фаз двигателя
втягивающий момент : максимальный момент нагрузки при котором SM может запускаться или останавливаться с определенной частотой управления и моментом инерции без потери шага
крутящий момент отрыва (момент остановки): момент нагрузки, при котором SM теряет синхронизацию при движении определенная инерция при заданном количестве шагов
скорость вытягивания : количество шагов (= управляющая частота) при который SM теряет синхронизацию при данной инерционной нагрузке.
угол шага : угол, при котором вал SM вращается для каждого управляющего импульса, когда последовательные фазы активируются одна за другой.Большинство SM имеют угол шага от 0,45 ° до 90 °.
точность шага : (допуск угла шага) указывает максимальную ошибку углового положения, которая может возникнуть. Ошибка не суммируется и выражается в процентах от угла шага.
имя шагового двигателя : SM именуется в соответствии с: количеством фаз статора, методом переключения, типом ротора. Пример: двухфазный биполярный PM-SM (рис.22-21).
Управление шаговым двигателем микроконтроллером
Ключевые слова: кодер , Matlab, микроконтроллер, шаговый двигатель
Авторские права © 2015 Издательство «Наука и образование». Все права защищены.
Все права защищены.1. Введение
Основное применение шагового двигателя — позиционирование ротора шагового двигателя с необходимой точностью.Шаговый двигатель подходит в первую очередь для задач, где точность является очень важным фактором. Области применения: компьютерное искусство (жесткие диски, принтеры), инструментальные станки, автомобилестроение, приводы промышленных роботов и манипуляторов и т. Д. Для управления шаговым двигателем необходим блок управления, который генерирует шаги двигателя. [1]
Шаговый двигатель — это особый тип синхронного двигателя. Разница между синхронным и шаговым двигателем заключается в том, что шаговый двигатель может достигать определенного количества определенных положений.Шаг двигателя достигается соответствующим действием блока управления. Основной принцип движения очень прост. Электрический ток, протекающий через катушку, создает магнитное поле. Это магнитное поле притягивает противоположный полюс магнита ротора, см. Рис.1. Посредством соответствующей генерации импульсов на катушки ротор начинает вращаться. [2]
Это магнитное поле притягивает противоположный полюс магнита ротора, см. Рис.1. Посредством соответствующей генерации импульсов на катушки ротор начинает вращаться. [2]
Угловая скорость двигателя ограничена из-за переходного магнитного поля. При превышении максимальной скорости двигателя двигатель начинает терять шаг. [3]
Одно из первых преимуществ шагового двигателя — эффективное позиционирование. Для точного позиционирования можно определить конкретный шаг, и двигатель вращается в нужное положение без энкодера. Основные отношения шагового двигателя следующие:
| (1) |
| (2) |
| (3) |
где угол шага двигателя, , число шагов, — положение, n — количество шагов, — угловая скорость.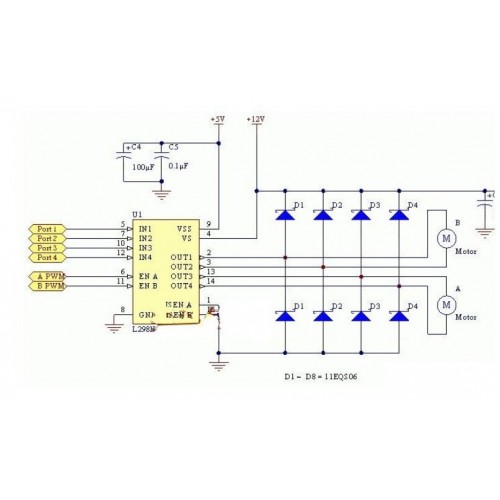 Отличие шагового двигателя от двигателя постоянного тока состоит в том, что ему не нужен энкодер, поскольку он работает с разомкнутым контуром, в то время как двигатель постоянного тока работает с замкнутым контуром. С другой стороны, позиционирование шагового двигателя ограничено размером шага ротора. Недостатками шагового двигателя является, например, более низкий крутящий момент по сравнению с двигателем постоянного тока [4] . Принцип действия шагового двигателя показан на рисунке 1.
Отличие шагового двигателя от двигателя постоянного тока состоит в том, что ему не нужен энкодер, поскольку он работает с разомкнутым контуром, в то время как двигатель постоянного тока работает с замкнутым контуром. С другой стороны, позиционирование шагового двигателя ограничено размером шага ротора. Недостатками шагового двигателя является, например, более низкий крутящий момент по сравнению с двигателем постоянного тока [4] . Принцип действия шагового двигателя показан на рисунке 1.
Рис ure 1. Шаговый двигатель
2. Биполярный шаговый двигатель
Биполярный шаговый двигатель состоит из двух обмоток и имеет четыре провода. В отличие от униполярных двигателей, биполярные двигатели не имеют центральных ответвлений. Преимущество отсутствия центральных ответвлений состоит в том, что ток одновременно проходит через всю обмотку, а не только через половину обмотки [5] .
Крутящий момент биполярного шагового двигателя пропорционален напряженности магнитного поля обмоток статора, которая пропорциональна количеству витков и току в обмотке [6, 7, 8] . Крутящий момент двигателя можно увеличить, увеличивая количество оборотов или увеличивая электрический ток. [9]
Крутящий момент двигателя можно увеличить, увеличивая количество оборотов или увеличивая электрический ток. [9]
Для биполярного управления необходимо обеспечить изменение полярности напряжения, чтобы ток катушки мог течь в обоих направлениях.
Скачать какРис. ure 2. Управление шаговым двигателем с помощью H-образного моста
Изменение полярности напряжения может быть достигнуто с помощью H-моста, см. Рисунок 2. Посредством соответствующего переключения баз транзисторов T1, T2, T3 и T4 шаговый двигатель может совершать вращательное движение.Как видно на рисунке 2, необходимы два H-образных моста. Для наших целей будет использоваться схема L298N, содержащая два независимых Н-моста, а также усилитель. Усилитель необходим, так как выводы микроконтроллера могут вырабатывать электрический ток примерно 20-40 мА. L298 принимает управляющие сигналы от системного контроллера, обычно микросхемы микрокомпьютера, и выдает все необходимые управляющие сигналы для силового каскада. Кроме того, он включает в себя две цепи ШИМ-прерывателя для регулирования тока в обмотках двигателя.
Кроме того, он включает в себя две цепи ШИМ-прерывателя для регулирования тока в обмотках двигателя.
3. Управление шаговым двигателем
Обычными способами управления шаговым двигателем являются волновой режим, полношаговый режим, полушаговый режим и микрошаговый режим. В идеале шаговый двигатель управляется синусоидальным током. В полношаговом режиме двигатель может демонстрировать вибрацию, которая в некоторых приложениях очень незначительна. С другой стороны, при использовании полношагового двигателя можно достичь более высокого крутящего момента. Что важнее, зависит от конкретного приложения.
Очень часто используемый метод управления шаговым двигателем — это только полушаговый и полушаговый режимы.Этот способ управления очень прост и понятен любому блоку управления. Однако проблемы возникают в области резонансной зоны, и двигатель может потерять шаг. Один из способов решения этой проблемы — разделение шага двигателя на микрошаги. Этот метод обеспечивает более точное позиционирование, а также ограничивает пульсации угловой скорости ротора в зоне низких частот шага.
Полушаговый и полушаговый режимы показаны на Рисунке 3.
Толстые линии на Рисунке 3 обозначают разницу полярностей напряжения.При рассмотрении рисунков 2 и 3 управление шаговым двигателем выглядит следующим образом: сигнал над жирной линией (рисунок 3) представляет переключение баз транзистора T1 и T4, в то время как T2 и T3 заземлены (рисунок 2). Когда сигнал падает ниже жирной линии (Рисунок 3), базы транзисторов T2 и T3 включаются, а T1 и T3 заземлены.
Скачать какРис. ure 3. Полушаговый режим и полушаговый режим
На рисунках 4 и 5 показаны режим полного шага и полушага с вращением по часовой стрелке.
Скачать какРис. ure 4. Режим полного шага и режим полушага
Скачать какРис. и 5. Полушаговый режим и полушаговый режим
4. Эксперимент и результаты
Целью эксперимента является сравнение полношагового и полушагового режимов управления шаговым двигателем. Для эксперимента используется двухполюсный шаговый двигатель SY28STh42-0674A с 200 шагами на оборот, что составляет 1.От 8 ° до одного шага. Для измерения угловой скорости и положения двигателя используется энкодер ISC3004 с 360 отсчетом на оборот. Измерительный стенд для эксперимента показан на рисунке 6.
Для эксперимента используется двухполюсный шаговый двигатель SY28STh42-0674A с 200 шагами на оборот, что составляет 1.От 8 ° до одного шага. Для измерения угловой скорости и положения двигателя используется энкодер ISC3004 с 360 отсчетом на оборот. Измерительный стенд для эксперимента показан на рисунке 6.
Fi gure 6. Измерительная стойка
Движение шагового двигателя управляется 8-битным микроконтроллером ATmega8 с частотой процессора 16 МГц. ATmega8-16PU управляет двигателем с помощью двойного мостового драйвера L298.Эта схема работала от постоянного напряжения 7 В. Измерение угловой скорости, а также положения шагового двигателя измеряется платой измерения ввода / вывода MF624, которая взаимодействует с Matlab / Simulink. Частота измерения угловой скорости 1 кГц. На следующем рисунке показана измерительная цепь.
Скачать какРис ure 7. Измерительная цепь
Пример измеренной угловой скорости показан на следующем рисунке.
Рис. ure 8. Пример измеренной угловой скорости с использованием времени фазы 1 5 00 мкс
Из всех измеренных данных были удалены крайние пиковые значения. Также для всех скоростей были определены средние значения. Затем был проведен анализ этих средних значений.
На следующих рисунках показаны результаты измерений.
Скачать какРис ure 9. Угловая скорость шагового двигателя в зависимости от фазы управления
Как видно из рисунка 9, при использовании полушагового режима двигатель может запускаться с меньшим значением времени фазы. Некоторые проблемы возникли при использовании времени фазы 1400 — 1900 мкс, и двигатель не мог работать. С другой стороны, при использовании полношагового режима двигатель работал со всеми временами фазы от 780 до 3400 мкс. Шаг фазы по времени составлял 20 мкс. Также угловая скорость двигателя была выше в полушаговом режиме по сравнению с полушаговым.
При измерении угловых скоростей также измерялся электрический ток. Электрическая мощность для обоих режимов показана на рисунке 10.
Скачать какРис. ure 10. Электрическая мощность шагового двигателя в зависимости от фазы управления
В полношаговом режиме было использовано большее количество электроэнергии. Таким образом, крутящий момент двигателя был выше в полношаговом режиме. В конце также показано позиционирование ротора шагового двигателя на один виток.
Скачать какРис. ure 11. Расположение шагового двигателя на один виток
5. Заключение
В статье экспериментально проанализирован биполярный шаговый двигатель SY28STh42-0674A, подключенный к энкодеру ISC3004 с 360 CPR. Движение контролировалось микроконтроллером ATmega8-16PU и двойным мостовым драйвером L298, работающим от напряжения 7В. В качестве метода контроля использовались полушаговый и полушаговый режимы. В полношаговом режиме были достигнуты более высокие угловые скорости.Кроме того, ротор мог вращаться, используя полный диапазон времени фазы от значения 780 до 3400 мкс. При использовании полушагового режима возникли некоторые проблемы с использованием определенных времен фазы от 1400 до 1900 мкс, и двигатель был непригоден для использования. Путем измерения электрического тока было установлено, что при использовании полушагового режима потребление электроэнергии выше и крутящий момент выше, чем крутящий момент в полушаговом режиме.
В полношаговом режиме были достигнуты более высокие угловые скорости.Кроме того, ротор мог вращаться, используя полный диапазон времени фазы от значения 780 до 3400 мкс. При использовании полушагового режима возникли некоторые проблемы с использованием определенных времен фазы от 1400 до 1900 мкс, и двигатель был непригоден для использования. Путем измерения электрического тока было установлено, что при использовании полушагового режима потребление электроэнергии выше и крутящий момент выше, чем крутящий момент в полушаговом режиме.
Благодарность
Авторы выражают благодарность Словацкому грантовому агентству KEGA за проект №.048TUKE-4/2014 «Повышение уровня знаний студентов в области применения встраиваемых систем в мехатронных системах».
Список литературы
| [1] | М. Келемен, И. Виргала,. Микова, П. Франковски, Экспериментальная идентификация свойств линейного привода, Acta Mechanica Slovaca (2015), Vol. 19, No. 1, pp. 42-47. 19, No. 1, pp. 42-47. | ||
| В статье | |||
| [2] | M.Дабабне, В. Эмар, И. Т.Трад, Управление прерывателем биполярного шагового двигателя, Международный инженерный журнал, Vol. 7, No. 2, pp. 61-73, 2013. | ||
| В статье | |||
| [3] | Ф. Духо, М. Декан, А. Бабинец, Л. Чованец, А. Витко, Обнаружение сварных швов в автоматизированной сварке, Прикладная механика и материалы. 611 (2014), стр. 519-528. | ||
| В статье | |||
| [4] | A.Морар, Моделирование биполярного гибридного шагового двигателя с помощью Matlab / Simulink, Procedure Technology, 8 th International Conference Interdisciplinarity in Engineering (2015), стр. 576-583. 576-583. | ||
| В статье | |||
| [5] | R. Condit, Stepping Motors Fundamentals, Microchip Technology Inc., (2004). | ||
| В статье | |||
| [6] | Т.Хопкинс, Привод шагового двигателя, Указания по применению (2012). | ||
| В статье | |||
| [7] | Степанов П., Лагуткин С., Никитин Ю., Разработка алгоритма определения остаточного срока службы по комплексной диагностике. Электромеханический привод, Acta Mechanica Slovaca. Том 19, Выпуск 2, страницы 52-56. | ||
| В статье | |||
| [8] | P.Степанов, С. Лагуткин, П. Божек, Ю. Никитин: Комплексный подход к техническим условиям электромеханических узлов в мехатронных системах, Американский журнал машиностроения (2014). | ||
| В артикуле | |||
| [9] | Коллар П., Никитин Ю., Страка, М .: Определение массы полок в универсальном стеллажном штабелеукладчике по Измерение крутящего момента преобразователя частоты главного привода, Технология производства, Вып.15, № 3, с. 363-366. | ||
| В статье | |||
Контроллер шагового двигателя
Контроллер шагового двигателяОсновы шагового двигателя
Если вы не знакомы с шаговыми двигателями, это примечание может быть полезно. Особый двигатель, который вы поставили, описан здесь (размер тела 17) с более подробной информацией здесь.Схема PIC
Дизайн показан на этой принципиальной схеме.Его цель — управлять шаговым двигателем, используя только PIC. Микроконтроллер и микросхема драйвера шагового двигателя. В простейшем виде схема может работать только с Move и DirIn сигналы поступают извне, а все остальные входы связаны либо высокий или низкий.
Назначение контактов входа / выхода схемы
- Перемещение = Старт / Стоп
- DirIn = направление влево или вправо
- Step_Mode = автономный режим или одношаговый режим
- Half_Step_In = полушаговый или полный шаг
- Reset = сбросить камеру в центральное положение
- Rstop = правый выключатель на шаговом двигателе в сборе
- Lstop = левый выключатель остановки на шаговом двигателе в сборе
- ~ Фаза A = индикатор положения фазы
| Штифт | Государство | |
|---|---|---|
| Низкая | Высокая | |
| Перемещение | Стоп | Начало |
| ДИРИН | Левый | Правый |
| Step_Mode | Шаг | Freerun |
| Half_Step_In | Полношаговый режим | Полушаговый режим |
| Сброс | Не сбрасывать | Сброс |
| Rstop | Не касается правого переключателя | Касание правого переключателя |
| Lstop | Не касаясь левого переключателя | Касание левого переключателя |
| ~ Фаза A | Фаза A | Не фаза A |
Режимы
Step_Mode
Режим свободного хода — это когда шаговый двигатель будет работать до тех пор, пока не будет ударяет по концевому выключателю или перемещаемый штифт установлен в низкое положение.
Пошаговый режим — это когда шаговый двигатель перемещается на один шаг каждый раз, когда перемещается штифт. поднят высоко.
Режим сброса
Переключая и перемещение, и штифт сброса вверх, затем вниз. Камера затем будет вращаться влево, пока не коснется переключателя Lstop, прежде чем отсчитывать его путь к переключателю Rstop, а затем обратный отсчет до его центра позиция.Подключения к последовательному порту
Подключения Rx и Tx подключены к соответствующим контактам PIC. но не были реализованы в этой конструкции.MC3479 Драйвер шагового двигателя
R1 и R2 помогают снизить энергопотребление как микросхемы драйвера, так и двигатель, когда двигатель не работает, при этом позволяя катушки двигателя, чтобы сохранить свой заряд и удерживать свое положение и также предотвращает перегрев ИС.
Z1 представляет собой стабилитрон и подключается между выводами Vm и Vd к обеспечить прохождение тока для катушки двигателя, когда переключение происходит место для подавления любых скачков напряжения, которые могут быть созданы..
C1 — это просто сглаживающий конденсатор, который помогает поддерживать стабильный 12 напряжение питания на микросхеме драйвера. Обычной практикой является наличие 0,1 мкФ конденсатор (на микросхему) между шинами питания и 0 вольт в большинстве конструкций.
R3 и R4 — подтягивающие резисторы, используемые для предотвращения Lstop и Rstop. входы в Pic становятся разомкнутыми, когда переключатели активирован.
R5, R6, R7 и R8 используются для согласования электрического характеристики кабеля, предотвращающие перекрестные помехи между сигналами линий.Обратите внимание, что R6 и R8 не используются в этой реализации.
Программа PIC
PIC уже запрограммирован. Исходный листинг сборки код здесь для вашего интереса.
Строительство
PIC поставляется вместе с другими основными компонентами и схемой. плата, на которую их припаять. Установлены две паяльные станции. в дальнем углу холла.Гарри Эллард даст практические туториалы по пайке для тех, кому нужна помощь, наверное в первую очередь Среда днем (подробности позже).
Другие листы данных
Технический паспорт драйвера шагового двигателя MC3479 можно найти здесь.
Технический паспорт PIC16F62X можно найти здесь.
Информацию о микросхеме драйвера ADM232A RS232 можно найти здесь.
Дополнительная информация о PIC и программировании PIC (MPlab) программное обеспечение можно найти на www.microchip.com.
Простая программа для взаимодействия со схемой шагового двигателя
Арчи Ховитт представил программу campan.c, который управляет линиями управления последовательного интерфейса для управления шаговым двигателем мотор.
Шаговый двигатель, управляемый микроконтроллером Arduino
Шаговый двигатель — это исполнительный механизм, который преобразует электрические импульсы в угловое смещение. Когда драйвер шагового двигателя получает импульсный сигнал, он заставляет шаговый двигатель вращаться на фиксированный угол (т.е. длину шага) в заданном направлении.Угловое смещение регулируется путем управления количеством импульсов для достижения точного позиционирования; скорость и ускорение вращения двигателя контролируются путем управления частотой импульсов для достижения цели регулирования скорости.
Ниже приводится схема подключения. Правый верхний угол — это соединение между Arduino и драйвером. VCC, импульс, направление и включение — это 4 контакта, предоставляемые микроконтроллером, что буквально означает, что для драйвера это не имеет ничего общего с Arduino.Выберите 4 выходных контакта. Вот и все. Подключены VCC и три + конец .
программа управления
Здесь четыре контакта 2, 3, 4 и 5 используются для подключения к драйверу, и им нужно только контролировать количество и частоту импульсов для управления углом и скоростью вращения двигателя. Изначально в Arduino была специальная библиотека Stepper для управления шаговыми двигателями, но функция относительно проста, поэтому я написал ее сам. Также есть функция частоты тонального сигнала (), которую можно использовать, если вы управляете только скоростью.
Кодпоказан ниже:
#define VCC 2
#define PLS 3
#define DIR 4
#define ENA 5
void setup () {
pinMode (VCC, ВЫХОД);
pinMode (PLS, ВЫХОД);
pinMode (DIR, ВЫХОД);
pinMode (ENA, ВЫХОД);
}
void loop () {
digitalWrite (VCC, HIGH);
digitalWrite (ENA, HIGH);
digitalWrite (DIR, HIGH);
for (int x = 0; x <1600; x ++) {
digitalWrite (PLS, HIGH);
delayMicroseconds (625/2);
digitalWrite (PLS, LOW);
delayMicroseconds (625/2);
}
задержка (1000);
digitalWrite (DIR, LOW);
for (int x = 0; x <1600; x ++) {
digitalWrite (PLS, HIGH);
delayMicroseconds (625/2);
digitalWrite (PLS, LOW);
delayMicroseconds (625/2);
}
задержка (1000);
}
Приведенный выше код должен заставить шаговый двигатель вращаться вперед на 1 круг, а затем останавливаться на 1 секунду, затем назад на 1 круг и затем останавливаться на 1 секунду.Время на 1 круг тоже 1 секунда. Этот цикл можно изменить в соответствии с вашими потребностями.
Описание программы: VCC обеспечивает вывод питания для драйвера, PLS предоставляет импульсный вывод для шагового двигателя, DIR определяет, вращается ли двигатель вперед или назад, ENA - это переключатель драйвера шагового двигателя, если схема управления дает высокое напряжение на выводе ENA, то это эквивалентно разрешению драйверу получения управляющего сигнала. Если ENA обеспечивает низкое напряжение, двигатель не будет двигаться независимо от того, как подан импульсный сигнал.Сгенерируйте импульс определенной частоты на выводе PLS и контролируйте время импульса для управления шаговым двигателем.
FAQ - Журнал низких комиссий за обработку в EEE / ECE / E & I / ECE / ETE
В какой стране находится IJAREEIE?
Индия
Рецензируется ли этот журнал коллегами?
Да
Предоставляет ли IJIRCCE идентификатор цифрового объекта (DOI) для каждой статьи?
Да, наш DOI - 10.15680 / IJAREEIE
Утвержден ли этот журнал для пользовательского контента?
Еще нет
Проиндексирован ли этот журнал в Scopus, SCI или SCIE?
Еще нет
Каков импакт-фактор IJAREEIE?
Импакт-фактор 7.282 [2021].
Какие статьи публикует IJAREEIE?
IJAREEIE стремится публиковать исследовательские работы во всех областях электротехники, электроники и приборостроения. Процесс публикации исследовательской работы начинается с отправки вашей исследовательской работы по электронной почте. И процесс рецензирования обычно завершается в течение 10-15 дней, в зависимости от количества исследовательских работ, находящихся в стадии разработки.
Как отправить статью в публикацию?
Вы можете отправить рукописи на адрес электронной почты
Этот адрес электронной почты защищен от спам-ботов.У вас должен быть включен JavaScript для просмотра.
. Ваша статья должна быть в любом формате документа Word. Подтверждение приема статьи будет отправлено в течение 8–12 дней с момента подачи статьи.
Как работает процесс проверки?
Рецензирование статей проводится слепым рецензированием. Все статьи, полученные IJAREEIE, отправляются в рецензионный комитет после удаления имени автора, чтобы иметь беспристрастное мнение об исследовании.
Когда и как я могу получить СЕРТИФИКАТЫ?
Авторы могут получить электронную копию СЕРТИФИКАТОВ в течение 2 дней после публикации по электронной почте и бумажную копию СЕРТИФИКАТОВ в течение 10 дней после публикации посредством SPEED POST .
Сколько времени требуется для публикации принятой статьи?
Фактическая дата публикации - 20-е число каждого месяца. Публикация принятой статьи занимает от 10 до 15 дней. Мы сообщим автору-корреспонденту журнала о принятии или отклонении статьи. Чтобы опубликовать принятую статью, любой из авторов должен передать форму авторских прав IJAREEIE.
У вас есть бумажные копии журнала?
Да.IJAREEIE публикует как онлайн-версию, так и печатную версию с твердыми копиями сертификатов.
Регулярно ли публикуется журнал?
Журнал выходит ежемесячно, т. Е. Двенадцать номеров в год.
Есть ли ограничения на количество страниц и плату за дополнительные страницы?
Да. Мы принимаем статью с любым количеством страниц, и если она превышает 8 страниц, взимается дополнительная плата.
Какова плата за публикацию принятой статьи?
Из-за проблем с COVID-19 плата за обработку немедленно пересматривается следующим образом:
Название | Индийские авторы | Иностранные авторы |
Тип публикации / тарифы | рупий.700 или Rs.900 или 1300 рупий | 50USD или 100USD |
Дополнительная печатная копия | рупий.500 за копию | 40 долларов США за копию |
Электронная копия свидетельства о публикации | Бесплатно | Бесплатно |
Если превышает 8 страниц: | 100 рупий за каждую дополнительную страницу | 5USD за каждую дополнительную страницу |
Как оплатить взнос за публикацию?
индийских авторов могут оплачивать гонорары через прямой банковский депозит или через Интернет-банкинг.