


Схема и принцип работы H-моста для управления двигателями
В различных электронных схемах часто возникает необходимость менять полярность напряжения, прикладываемого к нагрузке, в процессе работы. Схемотехника таких устройств реализуется с помощью ключевых элементов. Ключи могут быть выполнены на переключателях, электромагнитных реле или полупроводниковых приборах. Н-мост на транзисторах позволяет с помощью управляющих сигналов переключать полярность напряжения поступающего на исполнительное устройство.
Что такое Н-мост
 H-мост
H-мостВ различных электронных игрушках, некоторых бытовых приборах и робототехнике используются коллекторные электродвигатели постоянного тока, а также двухполярные шаговые двигатели. Часто для выполнения какого-либо алгоритма нужно с помощью электрического сигнала быстро поменять полярность питающего напряжения с тем, чтобы двигатель технического устройства стал вращаться в противоположную сторону. Так робот-пылесос, наткнувшись на стену, мгновенно включает реверс и задним ходом отъезжает от препятствия. Такой режим реализуется с помощью Н-моста. Схема Н-моста позволяет так же изменять скорость вращения электродвигателя. Для этого на один из двух ключей подаются импульсы от широтно-импульсного модулятора (ШИМ).
Схемой управления режимами двигателя является h-мост. Это несложная электронная схема, которая может быть выполнена на следующих элементах:
- Биполярные транзисторы
- Полевые транзисторы
- Интегральные микросхемы
Основным элементом схемы является электронный ключ. Принципиальная схема моста напоминает латинскую букву «Н», отсюда название устройства. В схему входят 4 ключа расположенных попарно, слева и справа, а между ними включена нагрузка.
 H-мост
H-мостНа схеме видно, что переключатели должны включаться попарно и по диагонали. Когда включен 1 и 4 ключ, электродвигатель вращается по часовой стрелке. 2 и 3 ключи обеспечивают работу двигателя в противоположном направлении. При включении двух ключей по вертикали слева или справа произойдёт короткое замыкание. Каждая пара по горизонтали закорачивает обмотки двигателя и вращения не произойдёт. На следующем рисунке проиллюстрировано, что происходит, когда мы меняем положение переключателей:
 Схема работы H-моста
Схема работы H-мостаЕсли мы заменем в схеме переключатели на транзисторы, то получим такой вот (крайне упрощенный) вариант:
 H-мост
H-мостДля того чтобы исключить возможное короткое замыкание h-мост на транзисторах дополняется входной логикой, которая исключает появление короткого замыкания. В современных электронных устройствах мостовые схемы изменения полярности дополняются устройствами, обеспечивающими плавное и медленное торможение перед включением реверсного режима.
Н-мост на биполярных транзисторах
Транзисторы в ключевых схемах работают по принципу вентилей в режиме «открыт-закрыт», поэтому большая мощность на коллекторах не рассеивается, и тип применяемых транзисторов определяется, в основном, питающим напряжением. Несложный h-мост на биполярных транзисторах можно собрать самостоятельно на кремниевых полупроводниковых приборах разной проводимости.
 H-мост на биполярных транзисторах
H-мост на биполярных транзисторахНедостатком такой схемы является то, что нельзя подавать на оба входа высокий потенциал, так как открытие обоих ключей одновременно вызовет короткое замыкание источника питания. Для исключения этого в интегральных мостовых схемах предусматривается входная логика, полностью исключающая некорректную комбинацию входных сигналов.

Схему моста можно изменить, поставив в неё более мощные транзисторы.
Н-мост на полевых транзисторах
Кроме использования биполярных транзисторов в мостовых схемах управления питанием, можно использовать полевые (MOSFET) транзисторы. При выборе полупроводниковых элементов обычно учитывается напряжение, ток нагрузки и частота переключения ключей, при использовании широтно-импульсной модуляции. Когда полевой транзистор работает в ключевом режиме, у него присутствуют только два состояния – открыт и закрыт. Когда ключ открыт, то сопротивление канала ничтожно мало и соответствует резистору очень маленького номинала. При подборе полевых транзисторов для ключевых схем следует обращать внимание на этот параметр. Чем больше это значение, тем больше энергии теряется на транзисторе. При минимальном сопротивлении канала выше КПД моста и лучше его температурные характеристики.
Дополнительным негативным фактором является зависимость сопротивления канала от температуры. С увеличением температуры этот параметр заметно растёт, поэтому при использовании мощных полевых транзисторов следует предусмотреть соответствующие радиаторы или активные схемы охлаждения. Поскольку подбор полевых транзисторов для моста связан с определёнными сложностями, гораздо лучше использовать интегральные сборки. В каждой находится комплементарная пара из двух мощных MOSFET транзисторов, один из которых с P каналом, а другой с N каналом. Внутри корпуса также установлены демпферные диоды, предназначенные для защиты транзисторов.

В конструкции использованы следующие элементы:
- VT 1,2 – IRF7307
- DD 1 – CD4093
- R 1=R 2= 100 ком
Интегральные микросхемы с Н-мостом
В ключах Н-моста желательно использовать комплементарные пары транзисторов разной проводимости, но с одинаковыми характеристиками. Этому условию в полной мере отвечают интегральные микросхемы, включающие в себя один, два или более h-мостов. Такие устройства широко применяются в электронных игрушках и робототехнике. Одной из самых простых и доступных микросхем является L293D. Она содержит два h-моста, которые позволяют управлять двумя электродвигателями и допускают управление от ШИМ контроллера. Микросхема имеет следующие характеристики:
- Питание – + 5 В
- Напряжение питания электромотора – + 4,5-36 В
- Выходной номинальный ток – 500 мА
- Ток в импульсе – 1,2 А
Микросхема L298 так же имеет в своём составе два h-моста, но гораздо большей мощности. Максимальное напряжение питания, подаваемое на двигатель, может достигать + 46 В, а максимальный ток соответствует 4,0 А. Н-мост TB6612FNG допускает подключение двух коллекторных двигателей или одного шагового. Ключи выполнены на MOSFET транзисторах и имеют защиту по превышению температуры, перенапряжению и короткому замыканию. Номинальный рабочий ток равен 1,2 А, а максимальный пиковый – 3,2 А. Максимальная частота широтно-импульсной модуляции не должна превышать 100 кГц.
Мостовые устройства управления электродвигателями часто называют драйверами. Драйверами так же называют микросхемы, только обеспечивающие управление мощными ключевыми каскадами. Так в схеме управления мощным электродвигателем используется драйвер HIP4082. Он обеспечивает управление ключами, собранными на дискретных элементах. В них используются MOSFET транзисторы IRF1405 с N-каналами. Компания Texas Instruments выпускает большое количество интегральных драйверов предназначенных для управления электродвигателями разных конструкций. К ним относятся:
- Драйверы для шаговых двигателей – DRV8832, DRV8812, DRV8711
- Драйверы для коллекторных двигателей – DRV8816, DRV8848, DRV8412/32
- Драйверы для бесколлекторных двигателей – DRV10963, DRV11873, DRV8332
На рынке имеется большой выбор интегральных мостовых схем для управления любыми электродвигателями. Сделать конструкцию можно и самостоятельно, применив качественные дискретные элементы.
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 🙂
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится 🙂
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то 🙂 Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + Iя*Rя
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка 🙂
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = Се * Ф * n
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет 🙂
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
М = См * Iя * Ф
См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага 🙂 Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.
В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.
Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.
Электродвигатель постоянного тока — устройство, принцип работы, управление двигателем и его пуск

Исторически первый электродвигатель работал именно на постоянном токе, так как во времена его изобретения в 1834 году Борисом Якоби единственным источником тока были гальванические батареи.
Принцип работы электродвигателя постоянного тока прост: в простейшем случае он имеет по одной паре полюсов на статоре и роторе, при этом направление тока в обмотке ротора дважды за оборот изменяется при помощи специального устройства – коллектора, представляющего собой набор пластин, соответствующий числу роторных обмоток.
При вращении ротора различные участки обмотки последовательно соединяются через щетки с внешним источником постоянного тока.
Так как электродвигатель с двухполюсным ротором имеет две мертвые точки, где запуск без внешнего импульса невозможен (полюса ротора находятся точно напротив полюсов статора, и равнодействующая сил отталкивания равна нулю), на практике используются только многополюсные роторы.
Кроме того, увеличение числа полюсов увеличивает равномерность вращения ротора.
Подключение обмотки якоря может быть различным:
- Независимое.
- Обмотка ротора не имеет прямого соединения со статором, такое подключение используется в схемах с регулировкой оборотов.
- Сериесное.
- Обмотка якоря включена последовательно со статором. При увеличении нагрузки на сериесный электродвигатель его обороты резко падают (но возрастает крутящий момент), при уменьшении нагрузки возможен разнос. По этой причине сериесное возбуждение не используется там, где возможен холостой ход электродвигателя. Классический пример сериесного мотора – автомобильный электростартер.
- Шунтовое.
- Якорь подключается параллельно статору. При перегрузке крутящий момент на роторе не изменяется, при отсутствии нагрузки не возникает разнос.
- Смешанное.
- Якорь имеет две обмотки, подключенных последовательно статору и параллельно с ним. По своим электромеханическим характеристикам компаундные электромоторы находятся между сериесными и шунтовыми – они способны поднимать крутящий момент при увеличении нагрузки и вместе с тем не склонны к разносу на холостом ходу.
Компаундное возбуждение часто используется в электроинструменте, где необходимо и ограничение максимальных оборотов, и устойчивость к росту нагрузок.
В зависимости от взаимного направления магнитных потоков обеих обмоток различают прямое и обратное компаундное включение: при обратном включении и правильном конструировании ротора возможно поддержание стабильных оборотов при изменении нагрузки, но такая схема склонна к периодическим колебаниям частоты вращения.
Магнитное поле статора является постоянным, поэтому статор может выполняться из мощных магнитов, не имея обмотки. Благодаря этому снижаются затраты меди на производство электродвигателя и уменьшается его стоимость.
Сфера применения электродвигателей постоянного тока – это в первую очередь устройства и системы с батарейным питанием: от микромоторов карманных плейеров до мощных автомобильных электростартеров, тяговые двигатели легких электромобилей и электрокаров, аккумуляторный электроинструмент.
При всех своих достоинствах (простота устройства, высокий КПД, легкость реверса) электродвигатели постоянного тока имеют ряд серьезных недостатков:
- При вращении ротора в питающей цепи возникают импульсные помехи в момент перехода ламелей коллектора мимо щеток, к которым добавляются радиопомехи из-за искрения на коллекторе.
- Сам коллектор и токопроводящие щетки неизбежно изнашиваются. Неравномерный износ ламелей коллектора и изолятора между ними может приводить к нарушению контакта щеток и коллектора, снижению мощности и обгоранию ламелей.
- В ряде случаев искрение щеток усиливается настолько, что возникает так называемое «кольцевое пламя» — сплошная область ионизированного воздуха, окружающая коллектор с разрушительными последствиями. Для противодействия этому чаще всего используется принудительная вентиляция области коллектора, выносящая ионизированный воздух наружу.
УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Наиболее очевидный способ управления оборотами электродвигателя постоянного тока – это изменение тока в его обмотках и, следовательно, магнитного потока. Изначально в цепь питания ротора включался мощный реостат, однако этот способ управления имел явные недостатки:
Сложность автоматического поддержания оборотов.
Движок реостата приводился либо вручную, либо присоединялся к центробежному регулятору. В любом случае резкое увеличение нагрузки не могло быть быстро скомпенсировано.
Высокие потери мощности.
На мощных электродвигателях реостат значительно нагревался, снижая КПД двигательной установки и требуя введения дополнительного охлаждения.
Применение линейного стабилизатора для управления электродвигателем – это, по сути, замена механического реостата электронным: изменяя мощность, рассеиваемую линейным стабилизатором, изменяют ток в обмотках электродвигателя.
Главное преимущество такой схемы – возможность создания устройств для поддержания оборотов с высокой скоростью реакции. Как известно, при вращении коллектора возникают броски тока в момент подключения очередной секции обмотки ротора.
Частота этих импульсов строго пропорциональна оборотам двигателя, что широко используется в устройствах правления коллекторными двигателями. Например, автомобильный доводчик стеклоподъемников автоматически отключает питание мотора, перестав фиксировать пульсацию тока в цепи питания стеклоподъемника (обнаружение момента остановки электродвигателя).
Совершенствование силовой электроники и в частности создание ключей с низким собственным падением напряжения в открытом состоянии (IGBT, MOSFET) позволило создать системы электронного управления широтно-импульсной модуляцией. Суть широтно-импульсной модуляции (сокращенно ШИМ) состоит в изменении длительности импульсов тока при сохранении их постоянной частоты.
Такой метод регулировки имеет значительно больший КПД, так как отсутствует элемент, на котором рассеивается излишняя мощность, как это было бы в случае использования реостата или линейного стабилизатора напряжения.
Основной проблемой схем с широтно-импульсной является индуктивность обмоток электродвигателя. Она делает невозможным моментальное нарастание и падение тока, искажая форму прямоугольного сигнала, подаваемого на электродвигатель. В свою очередь, при неправильном проектировании силового каскада ШИМ-контроллера это способно привести к перегреву силовых ключей и резкому падению КПД.
ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
В момент включения электродвигателя постоянного тока в питающую сеть возникает значительный бросок тока, так как пусковой ток электродвигателя в несколько раз (при мощностях, измеряемых киловаттами – до 20) превосходит номинальный. По этой причине прямой пуск электродвигателей используется только при небольших мощностях.
Распространенный способ снижения нагрузки на сеть при пуске электродвигателей высокой мощности – это реостатный запуск. В данном случае в момент включения мотора цепь ротора питается через мощный резистор или набор резисторов, по мере набора оборотов закорачиваемых специальными контакторами.Осциллограмма тока якоря при этом становится близкой к пилообразной, а амплитуда пульсаций зависит от числа ступеней пускового реостата.
В тех случаях, когда нагрузка на электродвигатель находится в определенном заданном диапазоне, реостатный пуск производится в автоматическом режиме с помощью реле времени. Эта схема используется на ряде электропоездов, однако распространены и ручные контроллеры, управляемые машинистами.
Недостаток реостатного пуска – большие потери на нагрев реостатов, из-за чего они должны иметь высокую мощность и в ряде случаев искусственное охлаждение.
Этого лишен пуск изменением питающего напряжения, применяемый в тех случаях, когда возможно управление источником тока, например, в электро трансмиссиях постоянного тока: в момент пуска приводящий генератор двигатель работает на минимальных оборотах, плавно набирая их по мере разгона.
Также могут применяться управляемые выпрямители, но этот способ более применим для электродвигателей низкой мощности.
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Управление возбуждением двигателей постоянного тока
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
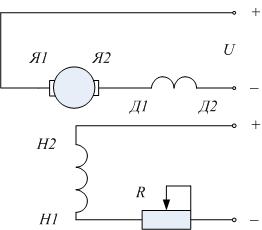 Рис.1 Схема независимого возбуждения
Рис.1 Схема независимого возбуждения
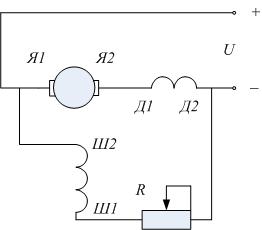 Рис.2 Схема параллельного возбуждения
Рис.2 Схема параллельного возбуждения
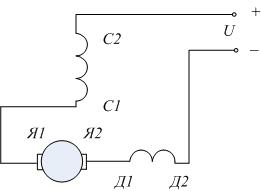 Рис.3 Схема последовательного возбуждения
Рис.3 Схема последовательного возбуждения
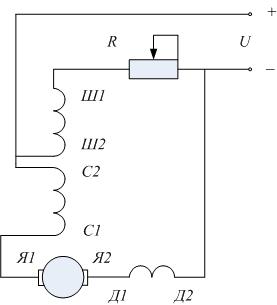 Рис.4 Схема смешанного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы.
В общем случае скорость двигателя определяется выражением:

Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами:
— Изменением питающего напряжения U
— Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
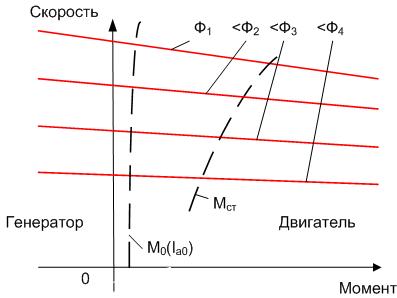
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения:
Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем.
Control Techniques Mentor MP —
MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А
MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A
MP1200Ax(R), MP1850Ax(R) — 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами. В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
Привод Mentor MP (Control Techniques) имеет для этого специальный режим.
По всем возникшим вопросам обращайтесь пишите нам на [email protected], тел.(812) 635-9030
Как работает H-мост для двигателей постоянного тока
В этой статье мы подробно рассмотрим, как работает H-мост, который применяется для управления двигателями постоянного тока с низким напряжением питания. В качестве примера мы будем использовать популярную среди любителей робототехники интегральную микросхему L298. Но сначала от простого к сложному.
H-мост на механических переключателях
Направление вращения вала у двигателя постоянного тока зависит от полярности питания. Чтобы изменить эту полярность, без переподключения источника питания, мы можем использовать 4 переключателя, как показано на следующем рисунке.
Этот тип соединения известен как «H Bridge» (H мост) — по форме схемы, которая похожа на букву «H». Эта схема подключения двигателя имеет очень интересные свойства, которые мы опишем в этой статье.
Если мы замкнем верхний левый и нижний правый переключатели, то двигатель будет подключен справа на минус, а слева на плюс. В результате этого он будет вращаться в одном направлении (путь прохождения тока указан красными линиями и стрелками).
Если же мы замкнем верхний правый и нижний левый переключатели, то двигатель будет подключен справа на плюс, а слева на минус. В таком случае двигатель будет вращаться в противоположном направлении.
Эта схема управления имеет один существенный недостаток: если оба переключателя слева или оба переключателя справа замкнуть одновременно, то произойдет короткое замыкание источника питания, поэтому необходимо избегать такой ситуации.
Интересным состоянием следующей схемы является то, что используя только два верхних или нижних переключателя, мы отключаем двигатель от питания, в результате чего двигатель останавливается.
Конечно, H-мост, выполненный исключительно только на переключателях, не очень универсален. Мы привели этот пример только для того, чтобы простым и наглядным образом объяснить принцип работы H-моста.
Но если мы заменим механические переключатели электронными ключами, то конструкция будет более интересна, поскольку в этом случае электронные ключи могут быть активированы логическими схемами, например, микроконтроллером.
H-мост на транзисторах
Для создания электронного H-моста на транзисторах можно использовать транзисторы как NPN, так и PNP типа. Могут быть использованы также и полевые транзисторы. Мы рассмотрим версию с NPN-транзисторами, потому что это решение использовано в микросхеме L298, которую мы увидим позже.
Транзистор — это электронный компонент, описание работы которого может быть сложным, но применительно к нашему H-мосту его работу легко проанализировать, поскольку он работает только в двух состояниях (отсечка и насыщение).
Транзистор мы можем представить просто как электронный переключатель, который закрыт, когда на базе (b) 0 В и открыт, когда на базе положительное напряжение.
Хорошо, мы заменили механические переключатели транзисторными ключами. Теперь нам необходим блок управления, который будет управлять нашими четырьмя транзисторами. Для этого мы будем использовать логические элементы типа «И».
Логика управления H-мостом
Логический элемент «И» состоит из интегрированных электронных компонентов и, не зная, что у него внутри, мы можем рассматривать его как своего рода «черный ящик», который имеет два входа и один выход. Таблица истинности показывает нам 4 возможные комбинации сигналов на входах и соответствующий им сигнал на выходе.
Мы видим, что только тогда, когда на обоих входах положительный сигнал (логическая единица), на выходе появляется логическая единица. Во всех остальных случаях на выходе будет логический ноль (0В).
В дополнение к данному логическому «И» элементу для нашего H-моста понадобиться другой тип логического элемента «И», у которого мы можем видеть небольшой круг на одном из его входов. Это все тот же логический элемент «И», но с одним инвертирующим (перевернутым) входом. В этом случае таблица истинности будет немного иная.
Если мы объединим эти два типа «И» элемента, с двумя электронными переключателями, как показано на следующем рисунке, то состояние выхода «Х» может быть в трех вариантах: разомкнутое, положительное или отрицательное. Это будет зависеть от логического состояния двух входов. Этот тип выхода известен как «выход с тремя состояниями» (Three-State Output) который широко используется в цифровой электронике.
Теперь посмотрим, как будет работать наш пример. Когда вход «ENA» (разрешение) равен 0В, независимо от состояния входа «А», выход «Х» будет разомкнут, поскольку выходы обоих «И» элементов будут равны 0В, и, следовательно, два переключателя также будут разомкнуты.
Когда мы подаем напряжение на вход ENA, один из двух переключателей будет замкнут в зависимости от сигнала на входе «A»: высокий уровень на входе «A» подключит выход «X» к плюсу, низкий уровень на входе «A» подключит выход «X» к минусу питания.
Таки образом, мы построили одну из двух ветвей «H» моста. Теперь перейдем к рассмотрению работы полного моста.
Эксплуатация полного H-моста
Добавив идентичную схему для второй ветви H-моста, мы получим полный мост, к которому уже можно подключить двигатель.
Обратите внимание, что вход разрешения (ENA) подключен к обеим ветвям моста, в то время как другие два входа (In1 и In2) независимы. Для наглядности схемы мы не указали защитные сопротивления на базах транзисторов.
Когда на ENA 0В, то на всех выходах логических элементов также 0В, и поэтому транзисторы закрыты, и двигатель не вращается. Если на вход ENA подать положительный сигнал, а на входах IN1 и IN2 будет 0В, то элементы «B» и «D» будут активированы. В этом состоянии оба входа двигателя будут заземлены, и двигатель также не будет вращаться.
Если мы подадим на IN1 положительный сигнал, при этом на IN2 будет 0В, то логический элемент «А» активируется вместе с элементом «D», а «B» и «C» будут отключены. В результате этого двигатель получит плюс питания от транзистора, подключенного к элементу «А» и минус от транзистора, подключенного к элементу «D». Двигатель начнет вращается в одном направлении.
Если же мы сигналы на входах IN1 и IN2 инвертируем (перевернем), то в этом случае логические элементы «C» и «B» активируются, а «A» и «D» будут отключены. Результат этого — двигатель получит плюс питания от транзистора, подключенного к «C» и минус от транзистора, подключенного к «B». Двигатель начнет вращаться в противоположном направлении.
Если на входах IN1 и IN2 будет положительный сигнал, то активными элементами с соответствующими транзисторами будут «A» и «C», при этом оба вывода мотора будут подключены к плюсу питания.
H-мост на драйвере L298
Теперь давайте посмотрим на работу микросхемы L298. На рисунке приведена структурная схема драйвера L298, который имеет два одинаковых H-моста и позволяет управлять двумя двигателями постоянного тока (DC).
Как мы можем видеть, отрицательная часть мостов напрямую не связана с землей, но доступна на выводе 1 для моста слева и на выводе 15 для моста справа. Добавив очень малое сопротивление (шунт) между этими контактами и землей (RSA и RSB), мы можем измерить ток потребления каждого моста с помощью электронной схемы, которая может измеряет падение напряжения в точках «SENS A» и «SENS B».
Это может быть полезно для регулирования тока двигателя (с использованием ШИМ) или просто для активации системы защиты, в случае если двигатель застопориться (в этом случае его ток потребления значительно возрастает).
Защитный диод для индуктивной нагрузки
Каждый двигатель содержит проволочную обмотку (катушку) и, следовательно, в процессе управления двигателем на его выводах возникает всплеск ЭДС самоиндукции, которая может повредить транзисторы моста.
Чтобы решить эту проблему, вы можете использовать быстрые диоды типа Shottky или, если наши двигатели не являются особо мощными, просто обычные выпрямительные диоды, например 1N4007. Нужно иметь в виду, что выходы моста в процессе управления двигателем меняют свою полярность, поэтому необходимо использовать четыре диода вместо одного.
https://www.inventable.eu
Радиосхемы. — Управление двигателем постоянного тока
Электроника в быту
материалы в категории
Во многих станках применяют электромоторы (ЭМ) постоянного тока. Они легко позволяют плавно управлять частотой вращения, изменяя постоянную составляющую напряжения на якорной обмотке, при постоянном напряжении обмотки возбуждения (0В).
Предлагаемая ниже схема позволяет управлять электромотором мощностью до 5 кВт.
Мощные ЭМ постоянного тока имеют несколько особенностей, которые необходимо учитывать:
а) нельзя подавать напряжение на якорь ЭМ без подачи номинального напряжения (обычно 180…220 В) на обмотку возбуждения;
б) чтобы не повредить мотор, недопустимо сразу подавать при включении номинальное напряжение на якорную обмотку, из-за большого пускового тока, превышающего номинальный рабочий в десятки раз.
Приведенная схема позволяет обеспечить необходимый режим работы — плавный запуск и ручную установку нужной частоты вращения ЭМ.
Направление вращения изменится, если поменять полярность подключения проводов на обмотке возбуждения или якоре (делается это обязательно только при выключенном ЭМ).
В схеме применены два реле, что позволяет выполнить автоматическую защиту элементов схемы от перегрузки. Реле К1 является мощным пускателем, оно исключает вероятность включения ЭМ при установленной резистором R1 не нулевой начальной скорости. Для этого на оси переменного резистора R1 закрепляется рычаг, связанный с кнопкой SB2, которая замыкается (рычагом) только при максимальном значении сопротивления (R1) — это соответствует нулевой скорости.
Когда замкнуты контакты SB2, реле К1 при нажатии кнопки ПУСК (SB1) включится и своими контактами К1.1 самоблокируется, а контакты К1.2 включат электропривод.
Реле К2 обеспечивает защиту от перегрузки при отсутствии тока в цепи обмотки возбуждения ЭМ. В этом случае контакты К2.1 отключат питание схемы.
Питается схема управления без трансформатора, непосредственно от сети через резистор R3.
Величина действующего значения напряжения на якорной обмотке устанавливается с помощью изменения резистором R1 угла открывания тиристоров VS1 и VS2. Тиристоры включены в плечи моста, что уменьшает число силовых элементов в схеме.
На однопереходном транзисторе VT2 собран генератор импульсов, синхронизированных с периодом пульсации сетевого напряжения. Транзистор VT1 усиливает импульсы по току, и через разделительный трансформатор Т1 они поступают на управляющие выводы тиристоров.
При выполнении конструкции тиристоры VS1, VS2 и диоды VD5, VD6 необходимо установить на теплоотводящую пластину (радиатор).
Часть схемы управления, выделенная на рисунке пунктиром, размещается на печатной плате .
Постоянные резисторы применены типа С2-23, переменный R1 — типа ППБ-15Т, R7 — СП—196, R3 — типа ПЭВ-25. Конденсаторы С1 и С2 любого типа, на рабочее напряжение не менее 100 В. Выпрямительные диоды VD1 …VD4 на ток 10 А и обратное напряжение 300 В, например Д231 Д231А Д232,Д232А,Д245,Д246.
Импульсный трансформатор Т1 выполнен на ферритовом кольце М2000НМ типоразмера К20х12х6 мм и намотан проводом ПЭЛШО диаметром 0,18 мм. Обмотка 1 и 2 содержат по 50 витков, а 3 — 80 витков.
Перед намоткой, острые грани сердечника нужно закруглить надфилем, чтобы исключить продавливание и замыкание витков.
При первоначальном включении схемы замеряем ток в цепи обмотки возбуждения (0В) и по закону Ома рассчитываем номинал резистора R2 так, чтобы срабатывало реле К2. Реле К2 может быть любым низковольтным (6…9 В) — чем меньше напряжение срабатывания, тем лучше. При выборе резистора R2 необходимо учитывать также рассеиваемую на нем мощность. -ная ток в цепи 0В и напряжение на резисторе, ее легко посчитать по формуле P=UI. Вместо К2 и R2 лучше применять выпускаемые промышленностью специальные токовые реле, но они из-за узкой области применения не всем доступны. Токовое реле несложно изготовить самостоятельно, намотав на большем герконе примерно 20 витков проводом ПЭЛ диаметром 0.7…1 мм.
Для настройки схемы управления вместо якорной цепи мотора подключаем лампу мощностью 300…500 Вт и вольтметр. Необходимо убедиться в плавном изменении напряжения на лампе резистором R1 от нуля до максимума,
Иногда, из-за разброса параметров однопереходного транзистора, может потребоваться подбор номинала конденсатора С2 (от 0,1 до 0,68 мкФ) и резистора R7 (R7 устанавливает при минимальном значении сопротивления R1 максимум напряжения на нагрузке).
Если при правильном монтаже не открываются тиристоры, то необходимо поменять местами выводы во вторичных обмотках Т1. Неправильная фазировка управляющего напряжения, приходящего на тиристоры VS1 и VS2, не может их повредить. Для удобства контроля работы тиристоров управляющее напряжение допустимо подавать сначала на один тиристор, а потом на другой — если регулируется резистором R1 напряжение на нагрузке (лампе), фаза подключения импульсов управления правильная. При работе обоих тиристоров и настроенной схеме напряжение на нагрузке должно меняться от 0 до 190 В.
Исключить вероятность подачи максимального напряжения на якорную обмотку в момент включения можно и электронным способом, воспользовавшись схемой, аналогичной приведенной на рис 6.17. (Конденсатор С2 обеспечивает плавное нарастание выходного напряжения в момент включения, а в дальнейшем на работе схемы не сказывается.) В этом случае включатель SB2 не нужен