


возвращение квадратурных энкодеров / Habr
Это уже третья статья, рассказывающая о квадратурных декодерах, на сей раз с применением к управлению бесколлекторными двигателями.Задача: есть обычный китайский бесколлекторник, нужно его подключить к контроллеру Copley Controls 503. В отличие от копеечных коптерных контроллеров, 503й хочет сигнал с датчиков холла, которых на движке нет. Давайте разбираться, для чего нужны датчики и как их ставить.
В качестве иллюстрации я возьму очень распространённый двигатель с двенадцатью катушками в статоре и четырнадцатью магнитами в роторе. Вариантов намотки и количества катушек/магнитов довольно много, но суть всегда остаётся одной и той же. Вот фотография моего экземпляра с двух сторон, отлично видны и катушки, и магниты в роторе:
Чтобы было ещё понятнее, я нарисовал его схему, полюса магнитов ротора обозначены цветом, красный для северного и синий для южного:
На датчики холла пока не обращайте внимания, их всё равно нет 🙂
Что будет, если подать плюс на вывод V, а минус на вывод W (вывод U не подключаем ни к чему)? Очевидно, будет течь ток в катушках, намотанных зелёным проводом. Катушки намотаны в разном направлении, поэтому верхние две катушки будут притягиваться к магнитам 1 и 2, а нижние две к магнитам 8 и 9. Остальные катушки и магниты в такой конфигурации роли практически не играют, поэтому я выделил именно магниты 1,2,8 и 9. При такой запитке мотора он очевидно крутиться не будет, и будет иметь семь устойчивых положений ротора, равномерно распределённых по всей окружности (левая верхняя зелёная катушка статора может притягивать магниты 1, 3, 5, 7, 9, 11, 13).
Давайте записывать наши действия вот в такую табличку:
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | — |
А что будет, если теперь подать плюс на U и минус на W? Красные катушки притянут к себе магниты 3,4,10 и 11, таким образом чуть-чуть повернув ротор (я по-прежнему выделяю магниты, за которые ротор тянет):
Давайте посчитаем, на сколько повернётся ротор: между щелями магнитов 1-2 и 3-4 у нас 51.43° (=360°*2/7), а между соответствующими щелями в статоре 60° (=360°/12*2). Таким образом, ротор провернётся на 8.57°. Обновим нашу табличку:
| Угол поворота ротора | U | V | W |
| 8.57° | + | n.c. | — |
Теперь сам бог велел подать + на U и — на V!
| Угол поворота ротора | U | V | W |
| 17.14° | + | — | n.c. |
Теперь опять пора выровнять магниты с зелёными катушками, поэтому подаём напряжение на них, но красный и синий магниты поменялись местами, поэтому теперь нужно подать обратное напряжение:
| Угол поворота ротора | U | V | W |
| 25.71° | n.c. | — | + |
C оставшимися двумя конфигурациями всё ровно так же:
| Угол поворота ротора | U | V | W |
| 34.29° | — | n.c. | + |
| Угол поворота ротора | U | V | W |
| 42.85° | — | + | n.c. |
Если мы снова повторим самый первый шаг, то наш ротор провернётся ровно на одну седьмую оборота. Итак, всего у нашего мотора три вывода, мы можем подать напряжение на два из них шестью разными способами 6 = 2*C
Запишем ещё раз всю последовательность для нашего двигателя:
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | — |
| 8.57° | + | n.c. | — |
| 17.14° | + | — | n.c. |
| 25.71° | n.c. | — | + |
| 34.29° | — | n.c. | |
| 42.86° | — | + | n.c. |
Есть один нюанс: у обычного коллекторного двигателя за переключение обмоток отвечают щётки, а тут нам надо определять положение ротора самим.
Теперь давайте поставим три датчика холла в те чёрные точки, обозначенные на схеме. Давайте договоримся, что датчик выдаёт логическую единицу, когда он находится напротив красного магнита. Всего существует шесть (сюрприз!) возможных состояний трёх датчиков: 23 — 2. Всего возможных состояний 8, но в силу расстояния между датчиками они не могут все втроём быть в логическом нуле или в логической единице:
Обратите внимание, что они генерируют три сигнала, сдвинутые друг относительно друга на 1/3 периода. Кстати, электрики используют слово градусы, говоря про 120°, чем окончательно запутывают нубов типа меня. Если мы хотим сделать свой контроллер двигателя, то достаточно читать сигнал с датчиков, и соответственно переключать напряжение на обмотках.
Для размещения датчиков я использовал вот такую платку, дизайн которой взял тут. По ссылке лежит проект eagle, так что я просто заказал у китайцев сразу много подобных платок:
Эти платки несут на себе только три датчика холла, больше ничего. Ну, по вкусу можно поставить конденсаторы, я не стал заморачиваться. Очень удобно сделаны длинные прорези для регулировки положения датчиков относительно статора.
Постойте, но ведь это очень похоже на квадратурный сигнал с обычного инкрементального энкодера!
Ещё бы! Единственная разница, что инкрементальные энкодеры дают два сигнала, сдвинутые друг относительно друга на 90°, а у нас три сигнала, сдвинутые на 120°. Что будет, если завести любые два из них на обычный квадратурный декодер, например, той же самой синей таблетки? Мы получим возможность определять положение вала с точностью до четырёх отсчётов на одну седьмую оборота, или 28 отсчётов на оборот. Если вы не поняли, о чём я, прочтите принцип работы квадратурного декодера в первой статье.
Я долго думал, как же мне использовать все три сигнала, ведь у нас происходит шесть событий на одну седьмую оборота, мы должны иметь возможность получить 42 отсчёта на оборот. В итоге решил пойти грубой силой, так как синяя таблетка имеет кучу аппаратных квадратурных декодеров, поэтому я решил в ней завести три счётчика:
Видно, что при каждом событии у нас увеличиваются два из них, поэтому сложив три счётчика, и поделив на два, мы получим равномерно тикающий определитель положения вала, с точностью до 6*7 = 42 отсчёта на оборот!
Вот так выглядит макет подключения датчиков Холла к синей таблетке:
В некоторых приложениях (например, для коптеров) все эти заморочки не нужны. Контроллеры пытаются угадать происходящее с ротором по току в катушках. С одной стороны, это меньше заморочек, но с другой стороны, иногда приводит к проблемам с моментом старта двигателя, поэтому слабоприменимо, например, в робототехнике, где нужны околонулевые скорости. Давайте попробуем запитать наш движок от обычного китайского коптерного ESC (electronic speed controller).
Вот здесь я выложил исходный код и кубовские файлы для синей таблетки. Таймер 1 генерирует PWM для ESC, таймеры 2,3,4 считают соответствующие квадратурные сигналы. Поскольку в прошлой статье я крайне подробно расписал, где и что кликать, то здесь только даю ссылку на исходный код.
На вход моему ESC я даю пилообразное задание скорости, посмотрим, как он его отработает. Вывод синей таблетки лежит тут, а код, который рисует график, тут.
Поскольку у меня двигатель имеет номинал 400KV, а питание я подал 10В, то максимальные обороты должны быть в районе 4000 об/мин = 419 рад/с. Ну а вот и график подоспел:
Видно, что реальные обороты соответствуют заданию весьма приблизительно, что терпимо для коптеров, но совершенно неприменимо во многих других ситуациях, почему, собственно, я и хочу использовать более совершенные контроллеры, которым нужны сигналы с датчиков холла. Ну и бонусом я получаю угол поворота ротора, что бывает крайне полезно.
Я провёл детство в обнимку с этой книжкой, но раскурить принципы работы бесколлекторников довелось только сейчас.
Оказывается, что шаговые моторы и вот такое коптерные моторчики — это (концептуально) одно и то же. Разница лишь в количестве фаз: шаговики (обычно, бывают исключения) управляются двумя фазами, сдвинутыми на 90°, а бесколлекторники (опять же, обычно) тремя фазами, сдвинутыми на 120°.
Разумеется, есть и другие, чисто практические отличия: шаговики рассчитаны на увеличение удерживающего момента и повторяемость шагов, в то время как коптерные движки на скорость и плавность вращения, что сказывается на количестве обмоток, подшипниках и т.п. Но в итоге обычный бесколлекторник можно использовать в шаговом режиме, а шаговик в постоянном вращении, управление у них будет одинаковым.
Update: красивая анимация от Arastas:
Новый датчик угла поворота, использующий эффект Холла для повышения надежности
Инженеры, которым необходимо измерять угол поворота антенны, направление протекания жидкостей, вращения роботизированных рук и других механизмов, теперь могут использовать датчик угла поворота Two-Pi hallpot, от Elweco Inc. Он может измерять угол поворота вала. Датчик может измерять углы до 360 0 и движение со скоростью до 5000 оборотов в минуту, а генерируемый сигнал имеет линейную зависимость от вращения. Датчик генерирует две одновременные линейные реакции с противоположными наклонами, что позволяет выбрать инженерам предпочтительное направление вращения, а затем использовать любой наклон. Данное устройство использует бесконтактные магнитные датчики Холла, что исключает трение между вращающимися частями и, соответственно, значительно продлевает срок службы.

Датчики не требуют каких-либо дополнительных аппаратных средств для получения или декодирования сигналов линейных измерений, а также управляющих сигналов, что исключает необходимость программного обеспечения. Поскольку устройство может генерировать два различных сигнала наклона, инженеры могут подключать данный датчик непосредственно к системе управления без использования дополнительных преобразующих элементов.
На графике ниже показана зависимость выходных сигналов от угла поворота. Для любого направления вращения доступен положительный и отрицательный наклон, что позволяет пользователю подобрать наиболее подходящий тип сигнала для его устройства.

Датчик использует два шариковых подшипника ABEC Class-5 на каждом валу ротора для подключения к измеряемому устройству. Датчик поставляется в трех различных конфигурациях для стандартных размеров и форм, поэтому никакого специального оборудования не нужно для их монтажа, что делает их очень удобными для внедрения в новые и при модернизации старых установок.
Устройство имеет напряжение питания от 4,5 В до 5,5 В постоянного тока при токе всего в 12 мА. Для их питания вполне подходят нерегулируемые источники питания. Выходной сигнал лежит в пределах от 300 мВ до 2700 мВ при температурном режиме от -20 0С до 85 0С и относительной влажности в 95%.
Магнитный бесконтактный датчик угла поворота PS2P-CON
02.04.2019
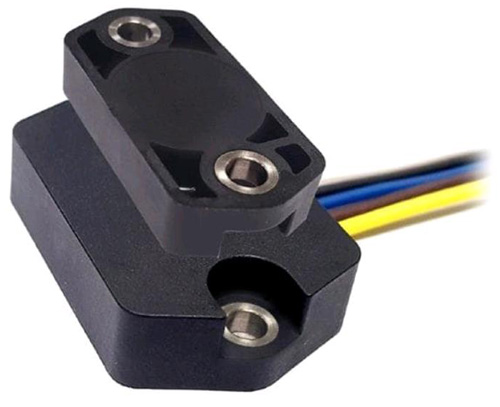
Датчик угла поворота — устройство, предназначенное для преобразования угла поворота вращающегося объекта в цифровые или аналоговые сигналы, позволяющие определить угол поворота. Датчики угла поворота широко применяются в промышленности, в компьютерной технике, автомобилестроении, робототехнике. Одними из самых распространенных являются датчики угла поворота на эффекте Холла (магнитные датчики). Принцип их работы достаточно прост — на вале, передающем вращение от объекта, крепится магнит. Чувствительный элемент, находящийся в корпусе, преобразует изменения магнитного поля в цифровой код или аналоговый сигнал.
Пожалуй, важнейшим элементом таких датчиков является механическая часть, включающая в себя вал и механизм фиксации магнита. И она же является «слабым» местом. С течением времени поворотный механизм стирается. Из-за ударного или вибрационного воздействия магнит может слегка изменить свое положение, что может неблагоприятно сказаться на точности измерений.
Магнитный бесконтактный датчик угла поворота PS2P-CONN лишен этих недостатков по одной-единственной причине — у него вообще нет вала. Датчик представляет собой устройство, состоящее из двух, механически никак не связанных между собой, модулей — электронный модуль обработки сигнала и сам магнит, помещенный в пластиковый корпус. Благодаря отсутствию механических вращающихся элементов и наличию специального модуля обработки сигнала, датчик сохраняет стабильность работы в условиях вибрации, грязи, значительных колебаниях температуры.
Подобную конструкцию можно установить практически везде, предоставляя разработчику или монтажнику широчайшие возможности для адаптации датчика в уже готовую конструкцию. Немаловажное значение имеет тот факт, что конструкция датчика позволяет устанавливать магнит со значительными отклонениями по вертикали и боковым смещением, т.к. угловая информация вычисляется по двум векторам распространения магнитного потока. На основании этих данных формируется выходной сигнал, пропорциональный вычисленному углу. На магните и корпусе датчика имеются метки («ключи»), позволяющие определить нулевое значение угла поворота.
Основные технические параметры:
- Рабочее напряжение: 5В;
- Тип выходного сигнала: аналоговый;
- Угловой диапазон датчика: 360°;
- Диапазон рабочих температур: -40…+125°C;
- Механическая износоустойчивость: не ограничена.
Руководство по применению датчиков Холла и герконов
Добавлено 2 октября 2017 в 16:05
Сохранить или поделиться
В предыдущей статье обсуждалась важность фокусирования на всей конструкции системы, а не на конкретном компоненте магнитной схемы. В тех системах, где требуются специальные датчики, необходимо, чтобы конструктор определил факторы окружающей среды, механического воздействия, электрические и магнитные параметры всей системы, чтобы можно было выбрать датчик, который соответствует этим условиям эксплуатации.
Как уже упоминалось в первой статье, между разработчиком, производителем и потребителем должна поддерживаться четкая и прямая связь, чтобы рабочие требования ко всем датчикам и системе в целом могли быть четко определены и были понятны всем вовлеченным сторонам. Без такой постоянной связи мало шансов, что будет спроектирована надежная система, которая будет функционировать как нужно. И, наоборот, при хорошей коммуникации в проектной группе на протяжении всего процесса может быть разработана надежная схема, которая соответствует всем известным требованиям.
В этой статье будет рассмотрен вопрос, как выбрать технологии магнитных датчиков для аналоговых и цифровых приложений. В ней также определяются и описываются преимущества герконовых датчиков и датчиков Холла с приведением примеров приложений с микропроцессорным управлением, которые используют эти датчики.
Цифровые датчики: высокая надежность в дискретных приложениях
Во многих приложениях используется цифровой выход для определения, находится ли объект в определенной позиции. Например, датчик может быть использован для проверки наличия защитного ограждения на механизме. Если ограждение находится на своем месте, машина работает. Если же это не так, машина работать не будет. В этом типе дискретного приложения требуется цифровой выход. В приложениях с магнитными датчиками исключительную надежность обеспечивают следующие цифровые датчики:
Герконовые датчики: преимущества и применение
Герконовый датчик представляет собой электрический ключ, который для работы не требует питания, в отличие от интегральной схемы. Выводы заводятся в герметизированную стеклянную колбу, в которой находятся контактные пластины. В результате ключ в герконе обладает высокой надежностью, поскольку он не подвержен влиянию влаги или других факторов окружающей среды. Поэтому контакты не будут окисляться и с нагрузками логического уровня будут продолжать работать в течение миллионов циклов.
Герконовые датчики очень популярны среди приложения с питанием от батареи. Они используются в автомобильных составляющих безопасности, например, обнаружение защелкивания застежки ремня безопасности и обнаружение столкновения. Поскольку герконы могут переключать нагрузки и постоянного, и переменного напряжения, их часто выбирают для цифровых приложений типа «вкл/выкл», например, детектирование закрытия/открытия двери в системах безопасности и в бытовой технике.
Например, дверь холодильника использует геркон для определения закрытия двери. Магнит крепится к двери, а герконовый датчик закрепляется на неподвижной раме, скрытой за внешней стенкой холодильника. Когда дверь открыта, герконовый датчик не может обнаружить магнитное поле, что заставляет включиться светодиодную лампу. Когда дверь закрывается, датчик обнаруживает соответствующее магнитное поле, и светодиод выключается. В этом приложении микроконтроллер внутри блока управления получает сигнал от геркона, а затем включает или выключает светодиод.
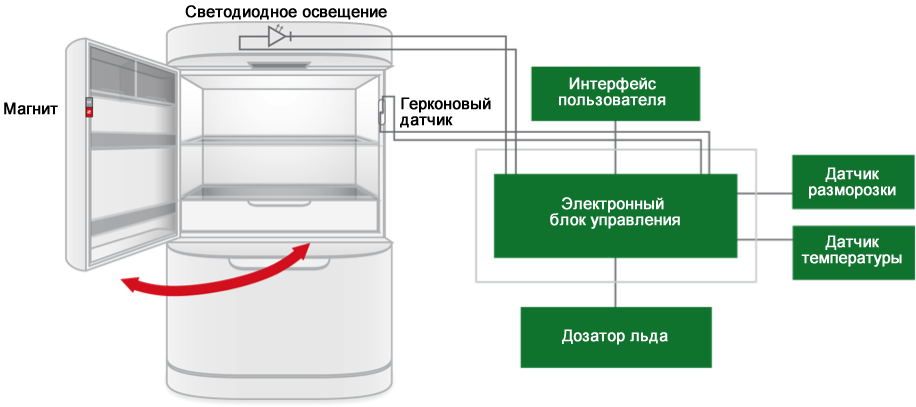 Рисунок 1 – Геркон в двери холодильника используется для включения и выключения светодиода
Рисунок 1 – Геркон в двери холодильника используется для включения и выключения светодиодаЦифровые датчики Холла: преимущества и применение
Цифровые датчики Холла используют полупроводниковые приборы и их выходное напряжение изменяется в зависимости от изменения магнитного поля. Эти датчики объединяют в семе чувствительный элемент с эффектом Холла и электрическую схему, обеспечивающую цифровой выходной сигнал типа «вкл/выкл», что соответствует изменению магнитного поля без использования каких-либо движущихся частей. Использование датчика на основе эффекта Холла ограничено приложениями с низкими постоянными напряжением и током. В отличие от геркона, устройство на основе эффекта Холла содержит в себе активную схему, поэтому оно потребляет небольшое количество тока в любое время.
Цифровые датчики Холла обеспечивают высокую надежность и для точных требований к измерениям могут быть запрограммированы на активацию при заданной величине магнитного поля.
Эти датчики очень популярны в высокоскоростных измерительных схемах таких бытовых машин, как стиральные машины и сушилки. В этом применении вращающийся 16-полюсный кольцевой магнит активирует чип датчика Холла при каждом прохождении красного (северный полюс) сегмента и деактивирует его при каждом прохождении белого (южный полюс) сегмента, что дает очень точный сигнал, соответствующий скорости. Цифровые датчики Холла особенно полезны в автомобильных приложениях безопасности, таких как определение защелкивания застежки ремня безопасности и определение скорости зубчатой передачи.
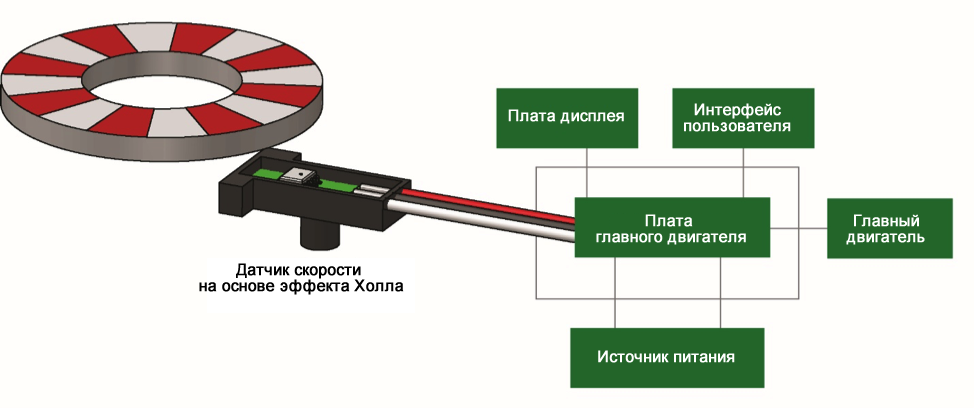 Рисунок 2 – Схема применения датчика Холла для измерения скорости
Рисунок 2 – Схема применения датчика Холла для измерения скоростиАналоговые/пропорциональные датчики для повышения стабильности и точности
Аналоговые измерительные приложения позволяют конечному пользователю мгновенно получать обратную связь о положении магнита. Аналоговый датчик Холла обладает высокоточным выходным сигналом с высоким разрешением.
Ранее аналоговые датчики Холла измеряли у магнитов плотность потока и в значительной степени зависели от внешней температуры. Так как в последние годы аналоговые технологии эффекта Холла развивались, теперь, вместо традиционной амплитуды поля, микросхема с датчиком Холла теперь измеряет угол поля, делая его намного менее чувствительным к изменениям температуры. Это улучшение позволяет датчику обеспечивать более стабильный аналоговый выходной сигнал в широком диапазоне температур.
Рассмотрим два типа датчиков Холла, которые могут быть выбраны для аналоговых измерительных схем:
Поворотный датчик Холла: преимущества и применение
Этот полупроводниковый датчик изменяет выходное напряжение при изменении магнитного поля. Он сочетает в себе измерительный элемента на основе эффекта Холла и электрическую схему, обеспечивающую аналоговый выходной сигнал, который соответствует изменению вращающегося магнитного поля без использования каких-либо движущихся частей. Этот датчик предлагает два варианта выходного сигнала: аналоговый или широтно-импульсно-модулированный (ШИМ). Устройство программируется таким образом, чтобы инженер мог связать определенное выходное напряжение или ШИМ сигнал с точной степенью поворота. При повороте до 360° доступны несколько точек программирования. Каждая программируемая точка представляет собой напряжение или ШИМ сигнал, который соответствует заданному углу магнитного поля. Это приводит к получению выходного сигнала, пропорционального углу поворота.
В отличие от механического и резистивно-плёночного поворотных устройств поворотный датчик Холла не испытывает механического износа или изменения значений сопротивления. Кроме того, он очень стабилен при нормальных рабочих температурах вплоть до +105°C. Результаты измерения угла поворота в диапазоне 0°–360° точно калибруются в соответствующем диапазоне выходного постоянного напряжения 0,5В–4,5В или коэффициента заполнения ШИМ сигнала 10–90%.
Поворотные датчики Холла становятся очень популярными для замены механических резистивно-пленочных потенциометров. Они используются в автомобильных и внедорожных приложениях, таких как определение положения клапана EGR в двигателях. Эти датчики также могут использоваться для определения положения поворотных ручек в приборах и бытовой технике.
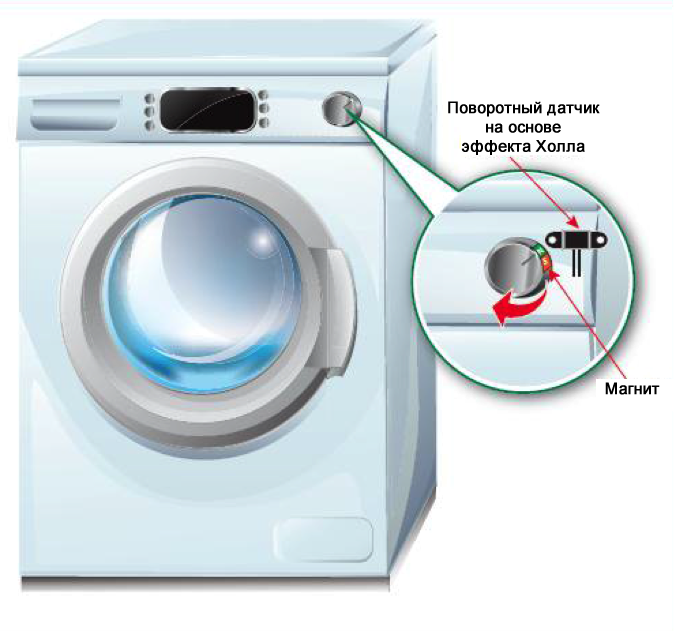 Рисунок 3 – Поворотный датчик Холла, используемый в поворотной ручке стиральной машины
Рисунок 3 – Поворотный датчик Холла, используемый в поворотной ручке стиральной машиныЛинейный датчик Холла: преимущества и применение
Линейные датчики Холла похожи на поворотные датчики Холла, за исключением того, что они измеряют не угловое, а линейное движение магнитного поля. Датчик Холла программируется для выдачи заданного напряжения, пропорционального заданному расстоянию. Типы выходного сигнала у него такие же, как и у поворотного датчика Холла. Датчик измеряет линейное перемещение и относительный угол потока магнитного привода на расстоянии до 30 мм на каждую микросхему с датчиком Холла. Это дает в результате выходной сигнал, точно пропорциональный перемещению датчика.
Перед программированием выходных напряжений или значений ШИМ-сигнала, соответствующих относительному значению магнитного поля от магнита на приводе, датчик и привод могут быть помещены на место окончательного монтажа в устройстве, чтобы в процессе программирования учесть все магнитные воздействия от близлежащего окружения. Это позволит инженеру отрегулировать выходной сигнал датчика, поскольку в процессе программирования будут учтены любые шунтирующие, механические воздействия и воздействия посторонних магнитных полей.
Линейные датчики Холла часто используются в качестве датчиков контроля уровня жидкости. В этом применении датчик определяет положение движущегося поплавка с прикрепленным магнитом. Линейные датчики также полезны в более сложных конструкциях, таких как автомобильная коробка передач.
Заключение
Данная статья объясняет методологию разработки оптимальной магнитной цепи, для которой требуется настраиваемый датчик. Всегда важно определять параметры проекта всей системы до начала процесса проектирования.
В схемах, где требуются специальные датчики, например, приложения со сложным микропроцессорным управлением, герконовые датчики и датчики Холла обеспечивают бесконтактную технологию, которая является высоко повторяемой и надежной. Цифровой выходной сигнал доступен и у герконов, и у датчиков Холла, и эта технология широко используется в бытовой и автомобильной технике. Аналогично, оба этих типа датчиков могут быть разработаны для использования в аналоговых приложениях, где требуется высокий уровень точности и стабильности.
Оригинал статьи:
Теги
ГерконДатчикДатчик ХоллаЭффект ХоллаСохранить или поделиться
Датчики Холла Si72xx компании Silicon Labs
Датчики Холла Si72xx компании Silicon Labs
Компания Silicon Labs выпускает три линейки интегральных датчиков магнитного поля на эффекте Холла серии Si72xx. Они предназначены для реализации разнообразных датчиков и детекторов положения и перемещения. В сравнении с аналогичными решениями других производителей датчики Si72xx выделяются минимальным энергопотреблением и высокой чувствительностью.
ОБЩИЕ СВЕДЕНИЯ
Среди датчиков Si72xx есть как типовые микросхемы с базовыми функциями, так и решения с различными дополнительными модулями, среди которых
- встроенный датчик температуры, схема термокомпенсации,
- поддержка режима пониженного энергопотребления,
- встроенный цифровой фильтр,
- функция автокалибровки (self-test),
- блок контроля вмешательства (tamper detection), детектирующий аномально высокое магнитное поле,
- цифровой интерфейс I²C для чтения данных и настройки параметров датчика.
На данный момент датчики доступны в корпусах SOT23 с тремя или с пятью выводами. В ближайшем будущем будут выпущены модели в корпусах DFN-8 и TO-92.
Датчики серии SI72xx чувствительны к магнитному полю, приложенному перпендикулярно к плоскости корпуса. Допустимые варианты расположение датчика относительно магнитного поля приведены на рисунках. Для детекторов движения, угла поворота, для контроля магнитного поля в 3D пространстве используют два или три датчика.
Датчики Холла SI72xx представлены следующими типами:
- Биполярная защелка с гистерезисом (Триггер, Latch)
- Униполярный пороговый с гистерезисом и детектором вмешательства (Ключ, Unipolar Switch)
- Омниполярный пороговый с гистерезисом и детектором вмешательства (Ключ, Omnipolar Swith)
- Линейный с аналоговвым выходом
- Линейный с ШИМ-выходом
- Линейный с SENT-выходом
СЕРИЯ SI720X — ЦИФРОВЫЕ КЛЮЧИ И ТРИГГЕРЫ
Датчики Холла серии Si720x производят измерения в определенной частотой и формируют выходной сигнал согласно измеренному уровню магнитного поля в зависимости от запрограммированных порогов. Si720x имеют один либо два информационных выхода.
Датчики Si720x выпускаются как в 3-выводном, так и в 5-выводном корпусе. Трехвыводные датчики имеют линии питания, земли и линию выхода, в то время как для датчиков в 5-выводном корпусе доступны два дополнительных сигнала:
- Первый дополнительный вывод служит для перевода микросхемы в режим сна (DIS)
- Второй вывод служит для сигнала блока контроля вмешательства (TAMPERb)
У 3-выводных датчиков Холла с поддержкой функции tamper detection при превышении порога детектора вмешательства на выходе выставляется «0».
Документация на серию доступна на сайте производителя.
| Тип датчика | Количество выводов |
Выходной сигнал |
Частота измерений | Индукция срабатывания Bop, индукция отпускания, Brp |
| Si7201-00 | 3 |
Омниполярный пороговый с гистерезисом, выход Push-pull |
5 Гц | Bop = ±1.1 мТ (max) Brp = ±0.2 мТ (min) | Bop — Brp | = 0.4 (typ) |
| Si7201-01 | ||||
| Si7201-02 | Bop = ±0.9 мТ (max) Brp = ±0.2 мТ (min) | Bop — Brp | = 0.2 (typ) |
|||
| Si7201-03 | Bop = ±2.8 мТ (max) Brp = ±1.1 мТ (min) | Bop — Brp | = 0.6 (typ) |
|||
| Si7201-04 | 1 Гц | Bop = ±1.4 мТ (max) Brp = ±0.2 мТ (min) | Bop — Brp | = 0.4 (typ) |
||
| Si7201-05 | 5 Гц | Bop = ±2.0 мТ (max) Brp = ±0.6 мТ (min) | Bop — Brp | = 0.6 (typ) |
||
| Si7201-06 |
Омниполярный пороговый с гистерезисом, выход открытый коллектор |
|||
| Si7201-07 | ||||
| Si7201-08 | Bop = ±2.8 мТ (max) Brp = ±1.1 мТ (min) | Bop — Brp | = 0.6 (typ) |
|||
| Si7202-00 |
Биполярная защелка с гистерезисом, выход Push-pull |
Bop = +0.65 мТ (max) Bop = +0.15 мТ (min) Brp = -0.65 мТ (max) Brp = -0.15 мТ (min) | Bop — Brp | = 0.8 (typ) |
||
| Si7202-01 | Bop = +1.4 мТ (max) Bop = +0.6 мТ (min) Brp = -1.4 мТ (max) Brp = -0.6 мТ (min) | Bop — Brp | = 2.0 (typ) |
|||
| Si7203-00 | 5 |
Омниполярный пороговый с гистерезисом, выход открытый коллектор |
1 кГц | Bop = ±1.1 мТ (max) Brp = ±0.2 мТ (min) | Bop — Brp | = 0.4 (typ) |
| Si7204-00 |
Биполярная защелка с гистерезисом, выход Push-pull |
Bop = +1.1 мТ (max) Bop = +0.6 мТ (min) Brp = -1.1 мТ (max) Brp = -0.6 мТ (min) | Bop — Brp | = 1.8 (typ) |
||
| Si7205-00 | 3 | Биполярная защелка с гистерезисом, выход открытый коллектор | 100 Гц | Bop = ±3.0 мТ (max) Brp = ±0.8 мТ (min) | Bop — Brp | = 0.6 (typ) |
| Si7206-00 | Bop = +1.4 мТ (max) Bop = +0.6 мТ (min) Brp = -1.4 мТ (max) Brp = -0.6 мТ (min) | Bop — Brp | = 2.0 (typ) |
| Тип датчика | Дополнительные функции | Напряжение питания | Потребляемый ток | Рабочий диапазон температур |
|||||
| Блок tamper detection | Схема температурной компенсации |
Встроенный датчик температуры |
Поддержка автокалибровки |
Цифровой фильтр | Режим измерений |
Режим сна | |||
| Si7201-00 | нет | нет | нет | нет | нет | 1.7 — 3.6 В |
5 мА |
0 .. 70 °C или -40 .. 125 °C
|
|
| Si7201-01 | да, порог ±19.8 мТ | ||||||||
| Si7201-02 | да (0.12%/°C) | да (FIR с выборкой 4) | |||||||
| Si7201-03 | нет | нет | нет | 1.7 — 5.5 В | |||||
| Si7201-04 | |||||||||
| Si7201-05 | да, порог ±19.8 мТ | ||||||||
| Si7201-06 | нет | ||||||||
| Si7201-07 | да, порог ±19.8 мТ | ||||||||
| Si7201-08 | нет | ||||||||
| Si7202-00 | 1.7 — 3.6 В | ||||||||
| Si7202-01 | 1.7 — 5.5 В | ||||||||
| Si7203-00 | да, порог ±19.8 мТ | 1.7 — 3.6 В |
от 50 нА |
||||||
| Si7204-00 | нет | ||||||||
| Si7205-00 | 3.3 — 26.5 В |
6.5 мА |
|||||||
| Si7206-00 | |||||||||
СЕРИЯ SI721X — ДАТЧИКИ ХОЛЛА С ЛИНЕЙНЫМ ВЫХОДОМ
Датчики серии Si721x работают на фиксированной частоте и имеют один выход. Доступно три типа выходного сигнала:
- аналоговый
- ШИМ-сигнал
- однопроводной протокол SENT
Датчики Si721x выпускаются как в 3-выводном, так и в 5-выводном корпусе. Трехвыводные датчики имеют линии питания, земли и линию выхода, в то время как для датчиков в 5-выводном корпусе доступны два дополнительных сигнала:
- Первый дополнительный вывод служит для перевода микросхемы в режим сна (DIS)
- Второй вывод служит для запуска функции автокалибровки (BIST)
Документация на серию доступна на сайте производителя.
| Тип датчика | Количество выводов | Выходной сигнал | Частота измерений | Индукция срабатывания Bop, индукция отпускания, Brp |
| Si7211-01 | 3 | Аналоговый | 7 кГц | |
| Si7212-00 | выход Push-pull, ШИМ-сигнал | 300 Гц | ||
| Si7213-00 | выход открытый коллектор, SENT-сигнал * | 1 кГц | ||
| Si7214-00 | выход открытый коллектор, ШИМ-сигнал | 150 Гц | ||
| Si7215-00 | выход открытый коллектор, SENT-сигнал * | 1 кГц | ||
| Si7216-00 | Аналоговый | |||
| Si7217-01 | 5 | 7 кГц |
* SENT (Single Edge Nibble Transmission) — это однонаправленный асинхронный протокол, распространенный в автомобильной промышленности. Описание стандартна доступно в документации на Si721x, а также на сайте standards.sae.org.
| Тип датчика | Дополнительные функции | Напряжение питания | Потребляемый ток | Рабочий диапазон температур | |||||
| Блок tamper detection | Схема температурной компенсации |
Встроенный датчик температуры |
Поддержка автокалибровки |
Цифровой фильтр |
|||||
| Режим измерений @ Vdd = 3.3 В |
Режим сна |
||||||||
| Si7211-01 | нет | нет | нет | нет | да (FIR с выборкой 16) | 2.25 — 5.5 В | 5.5 мА | -40 .. 125 °C | |
| Si7212-00 | 1.7 — 5.5 В | 5.0 мА | |||||||
| Si7213-00 | да, через установку «0» на линии выходного сигнала | ||||||||
| Si7214-00 | нет | 3.3 — 26.5 В или 4.0 — 26.5 В |
6.5 мА | ||||||
| Si7215-00 | да, через установку «0» на линии выходного сигнала | ||||||||
| Si7216-00 | нет | ||||||||
| Si7217-01 | да, через отдельный вывод | 2.25 — 5.5 В | 7.0 мА | от 50 нА | |||||
СЕРИЯ SI7210 С ПОДДЕРЖКОЙ I2C И ВСТРОЕННЫМ ДАТЧИКОМ ТЕМПЕРАТУРЫ
По сравнению с другими датчиками Холла Silicon Labs, датчики серии Si7210 имеют наиболее широкий набор функций.
Микросхемы данной серии оснащены цифровым интерфейсом I²C, который используется как для чтения данных, так и для изменения конфигурации датчика. На шине I²C также доступен сигнал с датчика температуры.
Датчики Si7210 выпускаются только в 5-выводном корпусе. Помимо линии питания, земли и двух линий шины I²C эти микросхемы дополнительную линию. Дополнительный вывод может использоваться как аналоговый выход или как цифровой выход, который можно использовать как сигнал прерывания для управляющего микроконтроллера.
Настройка датчика Si7210 по интерфейсу I²C позволяет
- изменять границы диапазона измерений
- изменять режим работы и состояние дополнительного выхода
- настраивать длительность режима сна (позволяет снизить энергопотребление до 50 нА в зависимости от температуры)
- настраивать порог срабатывания блока контроля вмешательства (tamper detection)
- включать цифровой фильтр для подавления шумов на выходе, выбирать тип фильтра (FIR или IIR) и размер выборки (от 2 до 212)
- настраивать частоту измерений
- настраивать параметры схемы температурной компенсации
- включать встроенную на чип катушку, которая создаёт магнитное поле достаточной силы для выполнения калибровки (self-test) датчика *
* Калибровочные параметры могут быть запрограммированы во встроенную энергонезависимую память датчика
Документация на серию доступна на сайте производителя.
| Тип датчика | Количество выводов | Выходной сигнал | Частота измерений | Индукция срабатывания Bop, индукция отпускания, Brp |
||
| Основной выход | Дополнительный выход | |||||
| Режим работы | Доп. выход в режимах 2, 3, 4 | |||||
| Si7210-00 | 5 | I²C |
Режим выбирается через I²C:
|
выход Push-pull | Настраивается через I²C | Bop = ±1.1 мТ (max) Brp = ±0.2 мТ (min) | Bop — Brp | = 0.4 (typ) |
| Si7210-01 | выход открытый коллектор | |||||
| Si7210-02 | выход Push-pull | |||||
| Si7210-03 | ||||||
| Si7210-04 | ||||||
| Si7210-05 | ||||||
| Тип датчика | Дополнительные функции | Напряжение питания |
Потребляемый ток |
Рабочий диапазон температур | |||||
| Блок tamper detection | Схема температурной компенсации | Встроенный датчик температуры | Поддержка автокалибровки | Цифровой фильтр | Режим измерений |
Режим сна |
|||
| Si7210-00 | да, порог настраивается через I²C | да | да, доступен на I²C Точность ±1.0 °C |
да | да (FIR или IIR) Тип и выборка настраивается через I²C |
1.7 — 5.5 В | 5.0 мА @ 3.3 В |
от 50 нА | -40 .. 125 °C |
| Si7210-01 | |||||||||
| Si7210-02 | да, доступен на I²C Точность ±4.0 °C |
||||||||
| Si7210-03 | нет | ||||||||
| Si7210-04 | |||||||||
| Si7210-05 | |||||||||
СХЕМА ФОРМИРОВАНИЯ АРТИКУЛА
Полный артикул датчика кодируется следующим образом:
| Тип датчика (см. таблицы выше) | |||||
| Ревизия микросхемы: • A, B и т.д. |
|||||
| Тип датчика (см. таблицы выше) | |||||
| Рабочий диапазон температур: • I — от -40 до +125°C • F — от 0 до +70°C |
|||||
| Корпус: • B — TO92 • M — DFN8 • V — SOT23 |
|||||
| Упаковка: • _ — стандартная • R — лента |
|||||
| Si7210 | -B- | 00 | -I | V | -R |
Так, например, датчик типа Si7210-00 в корпусе SOT23 и с рабочим диапазоном температур -40 до +125°C будет иметь код для заказа Si7210-B-00-IV-R.
СРЕДСТВА ОТЛАДКИ
Для знакомства с датчиками Холла серии Si72xx и для разработки приложений на базе этих датчиков предлагается набор Si72xx-WD-Kit.
В набор входят следующие компоненты:
- Отладочная плата для микроконтроллеров EFM32 Happy Gecko с предустановленными демо-программами
- Плата-расширение Wheel Demo EXP board, на которой установлено колесо прокрутки и два датчика Холла под углом 90 градусов друг к другу
- 6 дочерних плат с датчиками Si72xx разных типов
- 2 магнита
- USB-кабель
- кабели для подключения дочерних плат
Наличие на складе
Датчики положения распределительного вала (датчики фазы) Холла
Применение
Распределительный вал редуцирован по сравнению с коленчатым валом на 1:2. Их положение отображает, находится ли поршень двигателя, движущийся к верхней мертвой точке, в такте сжатия или такте выпуска. Датчик фазы на распределительном вале (также называемый фазовым датчиком) передает эту информацию на блок управления. Она необходима, например, для систем зажигания с одноискровыми катушками и для последовательного впрыска топлива (SEFI).
Стержневые датчики Холла

Рис. Стержневой датчик Холла:
- а Позиционирование датчика и приводного импульсного (активного) колеса
- b Прохождение выходного сигнала UA
- Электрический разъем (штекер)
- Корпус датчика
- Корпус двигателя
- Уплотнительное кольцо
- Постоянный магнит
- Интегральная схема Холла (1С Холла)
- Импульсное (активное)колесо с зубчатым сегментом (Z) и просветом (L)
- а Воздушный зазор
- Ф Угол поворота
Стержневые датчики Холла используют эффект Холла: вместе с распределительным валом вращается ротор (поз. 7, импульсное (активное) колесо с зубцами или сегментами или перфорированной диафрагмой) из ферромагнитного материала. Интегральная схема Холла (1С) (6) находится между ротором и постоянным магнитом (5), который формирует магнитное поле перпендикулярно элементу Холла.

Рис. Поколения датчиков распределительного вала:
TIM = twist intensive mounting (это означает, что датчик может вращаться вокруг любой оси, без ущерба для точности).
ТРО = true power on (это означает, что датчик распознает непосредственно в момент включения, находится ли он напротив зубца или просвета. Это важно для короткого времени синхронизации между сигналом коленчатого и распределительного вала)
Если зубец (Z) попадает на сенсорный элемент, пропускающий ток, (полупроводниковую пластинку) стержневого датчика, напряженность магнитного поля изменяется перпендикулярно элементу Холла. За счет этого создается сигнал по напряжению (напряжение Холла), который не зависит от относительной скорости между датчиком и импульсным (активным) колесом. Интегрированная электроника, обрабатывающая данные в микросхеме Холла (1С) подготавливает сигнал и выдает его как: сигнал прямоугольной формы.