


Принцип работы частотного преобразователя для асинхронного двигателя
Содержание:
- Что такое частотный преобразователь
- Принцип действия
- Настройка частотного преобразователя для электродвигателя
- Подбор частотного преобразователя для двигателя
- Видео
Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты. Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений. Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии. Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.

Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.

В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
Одновременно с частотой изменяется и подводимое напряжение, что позволяет увеличить КПД и коэффициент мощности электродвигателя. Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.

В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Настройка частотного преобразователя для электродвигателя
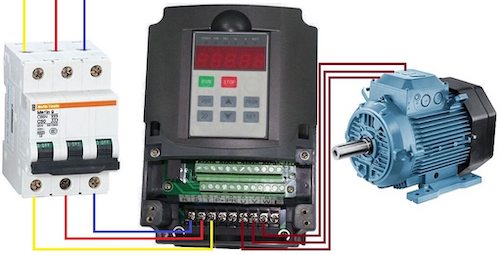
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.
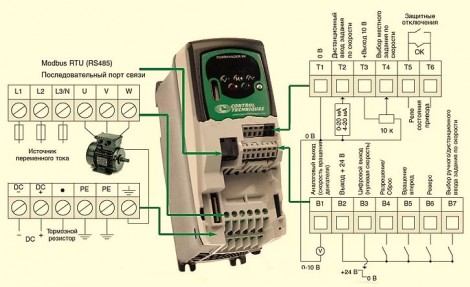
Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».

Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
После незначительного поворота рукоятки, двигатель начинает постепенно вращаться. Для переключения вращения в обратную сторону, существует специальная кнопка реверса. Затем с помощью рукоятки настраивается нужная частота вращения. На некоторых пультах вместо частоты вращения электродвигателя, отображаются данные о частоте напряжения. Поэтому рекомендуется заранее внимательно изучить интерфейс установленной аппаратуры.
Частотные преобразователи для асинхронных двигателей
Благодаря частотным преобразователям, работа современных асинхронных двигателей отличается высокой эффективностью, устойчивостью и безопасностью. Это особенно важно, поскольку каждый электродвигатель отличается индивидуальными особенностями режима работы. Поэтому оптимизации параметров питания агрегатов с использованием преобразователей частоты придается большое значение. Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.

Нормальная работа устройства будет зависеть от типа электродвигателя, его мощности, диапазона, скорости и точности регулировок, а также от поддержания стабильного момента вращения вала. Эти показатели имеют первостепенное значение и должны органично сочетаться с габаритами и формой аппарата. Следует обратить особое внимание на то, как расположены элементы управления и будет ли удобно им пользоваться.
Выбирая устройство, необходимо заранее знать, в каких условиях оно будет эксплуатироваться. Если сеть однофазная, то и преобразователь должен быть таким же. То же самое касается и трехфазных аппаратов. Многое зависит от мощности асинхронных двигателей. Если при запуске на валу необходим высокий пусковой момент, то и частотный преобразователь должен быть рассчитан на большее значение тока.
Частотник для трехфазного электродвигателя
Содержание:
- Устройство и принцип действия преобразователя
- Подключение и настройка преобразователя частоты
- Самостоятельное изготовление частотного преобразователя
- Обслуживание устройства в процессе эксплуатации
- Преимущества частотников в асинхронных двигателях
- Видео: Самодельный частотник 220-380V
Трехфазные асинхронные двигатели уже долгое время используются в промышленности и других сферах жизни и деятельности людей. Среди всех этапов рабочего процесса, более всего уделяется внимание обеспечению плавного пуска и торможения агрегата. Для того чтобы выполнить это условие, необходимо использовать – частотник для трехфазного электродвигателя. Кроме своего основного названия – частотный преобразователь известен также, как инвертор, частотно регулируемый привод или преобразователь частоты переменного тока.
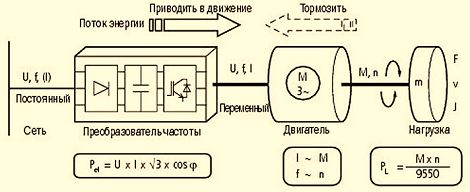
Основной функцией частотного преобразователя является регулировка скорости вращения асинхронных двигателей, с помощью которых электрическая энергия преобразуется в механическую. Первоначальное движение трансформируется в другие типы движений, необходимые для выполнения конкретной технологической операции. Использование частотных преобразователей позволяет довести коэффициент полезного действия электродвигателя до 98%.
Устройство и принцип действия преобразователя
Частотный преобразователь регулирует скорость вращения трехфазных электрических двигателей асинхронного типа. Вращение, полученное под действием электроэнергии, превращается в механическое движение с помощью специальных приводных устройств. Регулировка скорости вращения может осуществляться и другими устройствами. Однако все они обладают серьезными недостатками в виде высокой стоимости, сложной конструкции и низкого качества. Кроме того, диапазон регулировок подобных приспособлений совершенно недостаточный для нормальной работы.
Все эти проблемы эффективно решаются с помощью частотного преобразователя. Этот аппарат помимо обеспечения плавного пуска и остановки, контролирует и другие процессы, происходящие в двигателе. Использование частотника сократило до минимума риск возникновения неисправностей и аварийных ситуаций. Быстродействие и плавную регулировку обеспечивает специально разработанная схема частотного преобразователя для трехфазного двигателя. В результате ее применения существенно возросла продолжительность непрерывной работы электродвигателя, удалось добиться значительной экономии электроэнергии и увеличения КПД.
За счет чего же становится возможным управлять скоростью вращения электродвигателя? Прежде всего в частотном преобразователе изменяется напряжение, поступающее из сети. Далее, из него формируется уже нормальное трехфазное напряжение с нужной амплитудой и частотой, которое и потребляет электродвигатель. Регулировка скоростей осуществляется в достаточно широком диапазоне. В случае необходимости частотник позволяет переключить вращение ротора на противоположное направление. Все регулировки должны выполняться с учетом паспортных данных агрегата, с учетом максимально допустимых оборотов и установленной мощности.

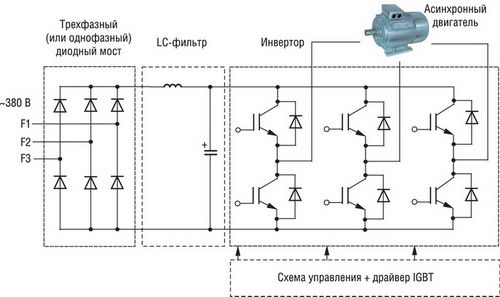
Общее устройство частотного преобразователя представлено на схеме. В конструкцию аппарата входят три составные части:
- Выпрямитель. При подключении к источнику электропитания формирует напряжение постоянного тока. В зависимости от модификации бывает управляемым или неуправляемым.
- Фильтр. Предназначен для сглаживания выпрямленного напряжения, поэтому в его конструкцию входят конденсаторы.
- Инвертор. Непосредственно формирует напряжение с нужной частотой и подает его на двигатель.
Основная классификация частотников осуществляется в зависимости от вида управления скоростью вращения. Существует два основных режима:
- Скалярный режим без обратной связи. В данном случае осуществляется управление магнитным полем статора.
- Векторный режим с обратной связью или без нее. Тут взаимодействуют магнитные поля ротора и статора, что и учитывается при управлении. В этом режиме происходит оптимизация момента вращения на различных скоростях. Данный способ управления считается более точным и эффективным. Однако он требует специальных знаний и навыков, более дорогой в обслуживании.
Подключение и настройка преобразователя частоты
Подключение частотных преобразователей особенно актуально для частных владельцев оборудования с асинхронными двигателями. Предварительно рекомендуется установить автоматический выключатель, который обесточит сеть при возможном коротком замыкании в одной из фаз.

В схемах частотники для асинхронных двигателей подключаются к электродвигателям двумя способами – «треугольником» и «звездой». Первая схема применяется для однофазных регулируемых приводов, без потери мощности. Такие частотники обладают максимальной мощностью 3 кВт и предназначены в основном для эксплуатации в бытовых условиях. Схема «звезда» используется там, где имеются трехфазные промышленные сети.
С целью ограничения пускового тока и уменьшения пускового момента, запуск двигателей, мощностью свыше 5 кВт осуществляется по смешанной схеме «звезда-треугольник». «Звезда» используется в момент запуска, когда напряжение подается на статор. После того как двигатель достигнет номинальной скорости, подача питания переключается на другую схему – «треугольник». Данный способ применяется не везде, а только там, где имеется возможность подключения сразу обеих схем.

Подключение пульта осуществляется в соответствии со схемой, прилагаемой к частотному преобразователю. Перед началом монтажа и до подачи питания управляющий рычаг должен находиться в положении ВЫКЛЮЧЕНО. Когда рычаг переводится в положение ВКЛЮЧЕНО, это действие подтверждается световым индикатором. Во многих моделях запуск по умолчанию осуществляется путем нажатия на кнопку RUN. Постепенное наращивание оборотов электродвигателя производится медленным поворотом рукоятки пульта. По достижении необходимой скорости, рукоятка фиксируется в этом положении. Для переключения режима на обратное вращение существует кнопка реверса.
Самостоятельное изготовление частотного преобразователя
В последнее время широкое распространение в быту получили асинхронные электродвигатели малой мощности, используемые в приводах различных устройств. Поэтому чтобы не приобретать к ним дорогостоящее дополнительное оборудование, многие домашние мастера обеспечивают частотное регулирование электродвигателей путем изготовления преобразователей своими руками. Таким образом, достигается экономия электроэнергии с сохранением мощности двигателя.

Домашняя однофазная сеть позволяет подключать электродвигатель, мощность которого не превышает 1 кВт. Именно для таких агрегатов в основном и изготавливаются самодельные частотники. Нужно заранее продумать схему подключения треугольников, предназначенную для однофазной сети. С этой целью выводы обмоток последовательно соединяются между собой, по принципу подключения вывода одной обмотки к вводу другой. Также рекомендуется, чтобы схема частотного преобразователя, собираемого собственноручно, была составлена заранее.
Перед началом конструирования нужно подготовить все необходимые элементы и материалы. Можно воспользоваться любым микроконтроллером – аналогом модели АТ90РWМ3В и драйвером трехфазного моста, аналогичного модели IR2135. Кроме того, нужно запастись 6 транзисторами типа IRG4BC30W, 6 кнопками и индикатором. Все детали располагаются на двух платах, соединяемых между собой гибким шлейфом.
Конструкция частотного преобразователя дополняется импульсным блоком питания. Эту деталь можно приобрести в готовом виде или собрать своими руками по отдельной схеме. Контроль над работой двигателя осуществляется с помощью внешнего управляющего тока или микросхемы IL300, имеющей линейную развязку. Для монтажа транзисторов и диодного моста используется общий радиатор. Управляющие кнопки дублируются оптронами ОС2-4.
Если электродвигатель обладает небольшой мощностью, то устанавливать трансформатор на однофазный частотный преобразователь необязательно. Вместо него можно использовать токовый шунт, в котором провода имеют сечение 0,5 мм. К нему же подключается и усилитель DA-1, выполняющий дополнительную функцию измерения напряжения.
Обслуживание устройства в процессе эксплуатации
Выполнение обязательных рекомендаций способствует значительному увеличению сроков эксплуатации частотных преобразователей.
- В первую очередь нужно выполнять своевременную очистку устройства изнутри от пыли. Основная процедура выполняется с помощью пылесоса, но полную очистку таким способом выполнить невозможно. Пылесос просто не справляется с толстыми и плотными слоями скопившейся пыли. Поэтому рекомендуется использовать компрессор или проводить чистку вручную.
- Большое значение придается своевременной периодической замене элементов, деталей и узлов. Вентиляторы охлаждения рекомендуется менять через 2-3 года эксплуатации. Существуют сроки для предохранителей, внутренних шлейфов и других частей. При соблюдении этих сроков частотник для электродвигателя будет служить значительно дольше.
- Необходимо в обязательном порядке контролировать внутреннею температуру и напряжение на шине. Слишком высокая температура приводит к негативным последствиям, когда разрушаются конденсаторы и начинает засыхать термопроводящая паста.
- Пасту рекомендуется менять, не реже, чем один раз в три года. Температура окружающей среды не должна превышать 40 градусов, а влажность и концентрация пыли – допустимых пределов.
Преимущества частотников в асинхронных двигателях
Асинхронные двигатели обладают многими преимуществами по сравнению с устройствами постоянного тока. Они отличаются простотой конструкции и высокой надежностью. Поэтому для бытовых и промышленных целей чаще всего выбираются асинхронные агрегаты.

В настоящее время многие пользователи отказываются от механического управления током в процессе эксплуатации двигателей. Такой способ не гарантирует надлежащее качество работы оборудования. Вместо него уже давно используются частотные преобразователи. Электронное управление позволяет существенно сократить потребление электроэнергии, сохраняя при этом собственную мощность двигателя.
Эксплуатировать частотные преобразователи следует в соответствии с техническими характеристиками, отраженными в документации оборудования. Самодельные устройства рекомендуется использовать только в бытовых условиях, а на производстве применять аппаратуру заводского изготовления. Ремонт и обслуживание преобразователей должны выполнять только квалифицированные специалисты.
Частотный преобразователь (электропривод) — Википедия
Частотный преобразователь — электронное устройство для изменения частоты электрического тока (напряжения)[1][2].
Частотный асинхронный преобразователь частоты служит для преобразования сетевого трёхфазного или однофазного переменного тока частотой 50 (60) Гц в трёхфазный или однофазный ток, частотой от 1 Гц до 800 Гц.
Промышленностью выпускаются частотные преобразователи электроиндукционного типа, представляющего собой по конструкции асинхронный двигатель с фазным ротором, работающий в режиме генератора-преобразователя, и преобразователи электронного типа.
Частотные преобразователи электронного типа часто применяют для плавного регулирования скорости асинхронного электродвигателя или синхронного двигателя за счет создания на выходе преобразователя электрического напряжения заданной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с заданной характеристикой V/f, в наиболее совершенных преобразователях реализовано так называемое векторное управление.
Частотный преобразователь электронного типа — это устройство, состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный, и инвертора (преобразователя) (иногда с ШИМ), преобразующего постоянный ток в переменный требуемой частоты и амплитуды. Выходные тиристоры (GTO) или транзисторы (IGBT) обеспечивают необходимый ток для питания электродвигателя.
Для улучшения формы выходного напряжения между преобразователем и двигателем иногда ставят дроссель, а для уменьшения электромагнитных помех — EMC-фильтр.
ПЧ — преобразователь частоты;ИТ — преобразователь частоты источник тока;
ИН — преобразователь частоты источник напряжения;
АИМ — преобразователь частоты с амплитудно-импульсной модуляцией;
ШИМ — преобразователь частоты с широтно-импульсной модуляцией Функциональная схема преобразователя частоты, выполненного по схеме источника напряжения Функциональная схема преобразователя частоты, выполненного по схеме источника тока
Электронный преобразователь частоты состоит из схем, в состав которых входит тиристор или транзистор, которые работают в режиме электронных ключей. В основе управляющей части находится микропроцессор, который обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
В зависимости от структуры и принципа работы электрического привода выделяют два класса преобразователей частоты:
- С непосредственной связью.
- С явно выраженным промежуточным звеном постоянного тока.
Каждый из существующих классов преобразователей имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
В преобразователях с непосредственной связью электрический модуль представляет собой управляемый выпрямитель. Система управления поочередно отпирает группы тиристоров и подключает обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. Частота выходного напряжения у таких преобразователей не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 50 Гц, и как следствие — малый диапазон управления частотой вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование незапираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя. «Резаная» синусоида на выходе преобразователя с непосредственной связью является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению КПД системы в целом.
Наиболее широкое применение в современных частотно регулируемых модулях находят преобразователи с явно выраженным промежуточным звеном постоянного тока. В преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе, фильтруется фильтром, сглаживается, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению КПД и к некоторому ухудшению массо-габаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используют автономный инвертор, который формирует электрическое напряжение заданной формы на обмотках электродвигателя (как правило, методом широтно-импульсной модуляции). В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия. Они имеют более высокий КПД (до 88 %) по отношению к преобразователям на IGBT-транзисторах[источник не указан 327 дней].
Преобразователи частоты являются нелинейной нагрузкой, создающей токи высших гармоник в питающей сети, что приводит к ухудшению качества электроэнергии.
- ВРД 39-1.10-052-2001 Методические указания по выбору и применению асинхронного частотно-регулируемого электропривода мощностью до 500 кВТ
принцип работы и схема подключения
Содержание:
- Где применяется
- Виды трехфазных инверторов
- Принцип работы
- Схема подключения
- Различия между одно- и трехфазными инверторами
Инверторные устройства используются в самых различных областях. В большинстве случаев, это однофазные приборы, работающие по классическим схемам. Однако, возникают ситуации, когда необходимо обеспечить электроэнергией асинхронный двигатель от аккумуляторной батареи или просто получить трехфазный ток для специфических нужд. И здесь на выручку приходит трехфазный инвертор с увеличенным числом электронных управляемых ключей, преобразующий постоянный ток в трехфазный переменный с требуемыми характеристиками.
Где применяется
Область применения трехфазных инверторов достаточно большая, а в некоторых случаях без них просто невозможно обойтись. Управление электродвигателями будет гораздо эффективнее, когда используются модифицированные современные трехфазные инверторные устройства. Они включаются в общую схему с одно- и трехфазными асинхронными двигателями, коллекторными агрегатами, а также с трехфазными двигателями постоянного тока.
Для управления разными типами двигателей используются свои режимы, поддерживаемые соответствующим программным обеспечением. Это дает возможность подключать практически любые двигатели в обмотках которых имеется от 1 до 3 фаз. В виде исключения можно отметить конструкцию биполярных двухфазных шаговых двигателей, оборудованных двумя независимыми обмотками.
В состав комплектующих такого инвертора входит основная плата управления, входы и выходы питания, а также интерфейс для ввода необходимых данных и вывода текущих показаний на дисплей или табло. Довольно часто управления осуществляется с помощью компьютера. Подключение инвертора выполняется через специальный разъем, установленный на плате.
В современных инверторах управления предусмотрен демонстрационный режим, при котором поочередно запускается показ основных функций – пуска и остановки, изменения скорости и реверса. Для переключений между функциями предусмотрены 4 кнопки, расположенные на плате.
Разновидности трехфазных инверторов
По своим параметрам, характеристикам и предназначению все виды преобразователей можно условно разделить на несколько групп.
В первую очередь, они могут быть автономными или зависимыми. В первом случае постоянный ток преобразуется в переменный, где частоту определяет система управления, а характеристики выходного напряжения тесно связаны с параметрами нагрузки. Зависимые устройства выдают ток, определяемый частотой местной сети, с постоянными значениями. В автономных приборах возможны плавные изменения напряжения от нуля до наибольшей допустимой величины. Поэтому такие инверторы чаще всего используются в различных схемах.

Существует дополнительная классификация автономных инверторов в соответствии с его схемой, способами принудительной коммутации, параметрами нагрузки и источников питания. Они могут быть автономными инверторами тока – АИТ или напряжения – АИН, а также резонансными – АИР.
В соответствии с количеством токовых коммутаций, трехфазный инвертор бывает одно- или двухступенчатым. В первом случае ток нагрузки сразу поступает к тиристору, включающемуся в работу, а во втором происходит изначальное переключение нагрузки на вспомогательную цепь, и лишь потом она переходит в основную. Если в схеме используются тиристоры, рассчитанные только на одну операцию, в нее могут быть дополнительно включены узлы принудительной коммутации.
Как работает 3-х фазный инвертор
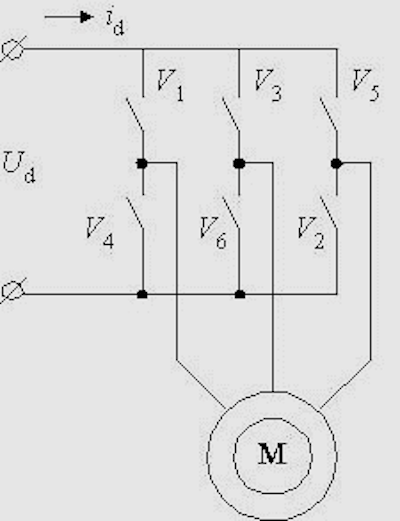
В состав силовой части трехфазного инвертора входят транзисторные ключи с маркировкой от VT1 до VT6 в количестве шести элементов и диоды обратного тока VD1–VD6, также шесть штук. Диоды соединяются в общий мост и подключаются параллельно с источником питания.
Силовая трёхфазная цепь инверторов может быть построена разными способами. При постоянной структуре цепи, подача управляющих сигналов происходит одновременно сразу к трем силовым транзисторам. Таким образом, ее структура остается неизменной. В случае использования переменной структуры, количество транзисторов для подачи управляющих сигналов нередко бывает менее трех.
Продолжительность переключений, выполняемых транзисторными ключами и частота напряжения на выходе, зависит от используемой системы управления. В интервале, включающем в себя один период, переключения на выходе транзисторов анодной и катодной групп может происходить от одного до множества раз.

Конфигурация тока на выходе получается в соответствии с характеристиками нагрузки. Если нагрузка активно-индуктивная, получается форма в виде ломаной кривой, разделенной на четыре части, расположенные на половине периода. Эффект от токовой нагрузки определяется интегрированием наиболее характерных участков токовой кривой. Необходимая форма нагрузки, в том числе и синусоидальная, получается при многократном включении и отключении управляемых вентилей в пределах одного периода.
Регулировка выходного напряжения в инверторе осуществляется при помощи широтно-импульсной модуляции – ШИМ. Сформированная модуляция в виде прямоугольника, получила название широтно-импульсного регулирования – ШИР. Такое регулирование выходного напряжения выполняется за счет изменяющейся продолжительности подключения нагрузки к источнику питания. Данная схема применяется в момент паузы между импульсами, когда происходит запирание двух одинаковых силовых транзисторов.
В случае групповых переключений в нагрузочном напряжении возникает определенная пауза. Это происходит при изменении током своего знака в тот момент, когда два транзистора начинают запираться. Если же ток к этому времени не изменит своего знака или нагрузка окажется слишком продолжительной, то формирования паузы в напряжении на выходе не получится. При использовании ШИР, структура тока и напряжения на выходе в диапазоне малых частот и напряжений, значительно ухудшается. Для того чтобы избежать этого негативного явления, ШИР приходится выполнять на действующих несущих частотах.
Схема подключения
Подключение трехфазного инвертора в качестве примера можно рассмотреть в общей связке с электродвигателем. На представленном ниже рисунке обозначен двигатель М, работающий под управлением ключей V1 – V6. Все полупроводники для более наглядного отображения представлены как обычные механические контакты. Для питания используется постоянное напряжение Ud, поступающее из выпрямителя, не отмеченного на схеме. Ключи 1, 3, 5 относятся к верхним, а три ключа 2, 4, 6 – к нижним.
Верхние и нижние ключи никогда не открываются одновременно, во избежание короткого замыкания. Схема будет нормально работать, когда нижний ключ открывается, а верхний к этому времени уже находится в закрытом состоянии. Для формирования этой паузы используются контроллеры.
Продолжительность паузы должна гарантировать, чтобы силовые транзисторы закрывались своевременно. При недостаточности этого временного промежутка, верхний и нижний ключи могут одновременно открыться на очень короткое время. Это крайне нежелательно и не должно происходить систематически, поскольку выходные транзисторы сильно нагреваются и быстро выйдут из строя. Подобная ситуация известна как сквозные токи.
Существует гальваническая связь между нижними и верхними ключами и с управляющим устройством. Подача сигнала управления выполняется через резисторы непосредственно к составному транзистору, выполняющему функции драйвера нижнего ключа. У верхних ключей отсутствует гальваническая связь с элементом управления и с общим проводником. Поэтому для более эффективного управления к верхнему составному транзистору помимо драйвера дополнительно устанавливается оптрон. Питание верхних ключей производится от отдельных выпрямителей, каждый из которых подключен к собственной обмотке трансформатора.
Различия между одно- и трехфазными инверторами
Существуют принципиальные отличия однофазного от трехфазного инвертора. В основном они связаны с их конструктивными особенностями. Это наглядно видно на примере устройств, используемых с солнечными батареями. Схема однофазного инвертора использует 1 или 2 трекера МРРТ, выполняющих слежение за максимальной отметкой мощности панели.
Далее в цепь включается инвертор, выполняющий преобразование тока и синхронизирующий его с сетью. Электроэнергия, полученная от этого инвертора, поступает непосредственно в сеть. К каждому трекеру подключается своя солнечная панель. При наличии двух трекеров можно подключить на выбор 1 или сразу 2.

Трехфазный инвертор напряжения может иметь в своей схеме от 1 до 4 трекеров, в зависимости от мощности каждого преобразователя. Они также выполняют слежение за точкой максимальной мощности и направляют постоянный ток от солнечной панели к входу инвертора. В свою очередь, преобразователь соединяется с сетевыми фазами и синхронизирует их сдвиг на все 3 фазы.

Таким образом, основное отличие между обоими устройствами заключается в разнице распределения полученной энергии. Распределение электричества трехфазным прибором осуществляется равномерно между всеми фазами. Если же для этой цели используется три однофазных инвертора, то выходная мощность каждого из них будет колебаться в соответствии с мощностью, выдаваемой солнечной панелью.
Довольно часто возникает вопрос, что выгоднее использовать, одно- или трехфазный инвертор? Решение принимается индивидуально, исходя из конкретных условий эксплуатации. Несмотря на 1 корпус вместо 3-х, он может оказаться слишком дорогим, поэтому сравнение нужно делать по тем или иным известным моделям. То же самое касается VHHN-трекеров, количества силовых ключей и других важных компонентов.
Частотный преобразователь
27.05.2019Частотный преобразователь напряжения — это электрический прибор, служащий для преобразования напряжения и частоты переменного тока в напряжение с заданной амплитудой и частотой. Он также способен преобразовывать постоянное напряжение в переменное с заданными характеристиками.
 Частотные преобразователь Toshiba
Частотные преобразователь ToshibaДля чего нужен частотный преобразователь?
Этот вопрос задают множество людей, которым впервые понадобилось подключить трехфазный двигатель насоса или вентилятора. Конечно, любой электродвигатель можно напрямую подключить к сети переменного тока через соответствующую защитную аппаратуру (моторный автоматический выключатель или контактор с тепловым реле).
 Насос водяной
Насос водяной  Канальный вентилятор
Канальный вентиляторРассмотрим процессы, происходящие в электродвигателе в момент прямого пуска с помощью автоматического выключателя или кнопки включения контактора на примере обычного трехфазного асинхронного двигателя.
На статорные обмотки электродвигателя подается переменное напряжение, которое генерирует соответствующее электромагнитное поле этих обмоток. Это поле, направленное в сторону ротора, в свою очередь заставляет генерироваться электрический ток в короткозамкнутых витках ротора. Затем ток в обмотках ротора генерирует ответное магнитное поле, которое и приводит к движению ротора относительно статора. Все эти процессы, возникающие в момент пуска, называются процессом намагничивания статора и ротора.
 Асинхронный электрический двигатель
Асинхронный электрический двигательТрехфазный электродвигатель сам по себе не нужен: на его валу обязательно присутствует нагрузка (самая простая – в виде лопастей вентилятора). В ситуации с нагруженным конвейером всё сложнее. Тем не менее, у этой нагрузки есть момент инерции – момент, который необходимо преодолеть двигателю для запуска вращения вала. Таким образом, все эти электромагнитные и механические силы в момент пуска напрямую соотносятся с обычным пусковым током двигателя. Как несложно догадаться, этот ток будет в несколько раз (2-7) больше номинального тока двигателя, который получится в установившемся режиме работы.
Скорость вращения электродвигателя или число оборотов в минуту
Скорость вращения вала как асинхронных, так и синхронных электродвигателей определяется частотой вращения магнитного поля статора. Магнитное поле вращается соответственно подаваемому на обмотки статора переменному току по трем фазам. Именно это «вращение» электрического тока в статоре приводит к вращающемуся магнитному полю и определяется по формуле:
n = (60 • f / p) • (1 – s)
где n – номинальное число оборотов вала асинхронного электродвигателя, p – число пар полюсов (см. на паспортной табличке), s – скольжение (разность скоростей поля ротора и поля статора), f – частота переменного тока (например, 50 Гц). Число пар полюсов статора зависит от конструкции катушек статора. Скольжение зависит от нагрузки на валу электродвигателя. Таким образом, подключив электродвигатель к сети переменного тока, мы получим вращение с постоянной скоростью.
Зачем нужно регулировать скорость и как это делается?
Заданное в паспортной табличке число оборотов двигателя на 1 минуту не всегда устраивает потребителя. Иногда скорость механизма хочется уменьшить, а давление в трубе наоборот поднять. Возникает потребность в изменении частоты вращения вала электродвигателя. Как видно из формулы выше, наиболее простой способ изменения частоты вращения вала электродвигателя –изменить частоту переменного тока f.
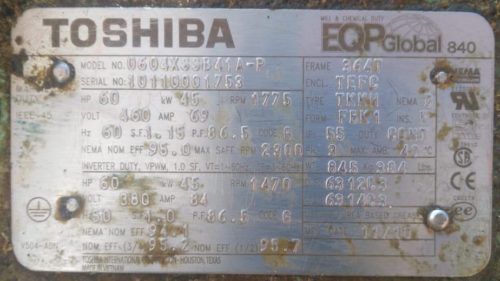 Электродвигатель Toshiba 0604XSSB41A-P
Электродвигатель Toshiba 0604XSSB41A-PПринцип работы частотного преобразователя
Вот тут и приходит на помощь частотный преобразователь. Он, как говорилось в самом начале, позволяет задавать на своем выходе заданные в настройках амплитуду напряжения и частоту переменного тока.
Частота вы выходе может регулироваться в диапазоне 0.01 – 590 Гц если брать инверторы серии AS3 Toshiba. Для серии S15 Toshiba диапазон регулирования находится в пределах 0.01 – 500 Гц. Для серии nC3E Toshiba диапазон регулирования находится в пределах 0.01 – 400 Гц. Это объясняется функциональным назначением разных серий ПЧ.
Напряжение на выходе может изменяться в диапазоне от 0 В до напряжения питания ПЧ, т.е. текущего напряжения на входе частотного преобразователя. Это свойство можно использовать для получения нужного выходного напряжения и частоты, что ценно, например, для испытания стендового оборудования. Правда для этого придется использовать специальный выходной синусный фильтр, чтобы получить чистые синусоидальное напряжение и ток.
С частотой все понятно, но зачем нужно изменять напряжение?
Дело в том, что для поддержания определенного магнитного поля в обмотках статора требуется изменять не только частоту, но и напряжение. Получается, что частота должна соответствовать определенному напряжению. Этот называется законом скалярного управления U/f (V/f), где U или V – напряжение.
Также существует закон векторного регулирования. Векторное регулирование используется для оборудования, где требуется поддерживать необходимый крутящий момент на валу при низких скоростях электродвигателя, высокое быстродействие и точность регулирования частоты вращения. Векторное управление представляет собой математический аппарат в «мозге» частотного преобразователя, который позволяет точно определять угол поворота ротора по токам фаз двигателя.
Использование частотника позволяет убрать большой пусковой ток, достигая таким образом значительного экономического эффекта при частых пусках и остановках электродвигателя.
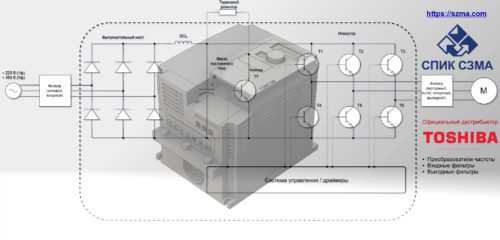
Схема частотного преобразователя
Ниже представлена типовая схема частотного преобразователя. Входное сетевое трехфазное или однофазное напряжение подается через опциональный входной фильтр на клеммы диодного моста. Неуправляемый диодный (или управляемый тиристорный) мост преобразует переменное напряжение сети в постоянное пульсирующее напряжение. Для фильтрации пульсаций служит звено постоянного тока из одного или нескольких конденсаторов C.
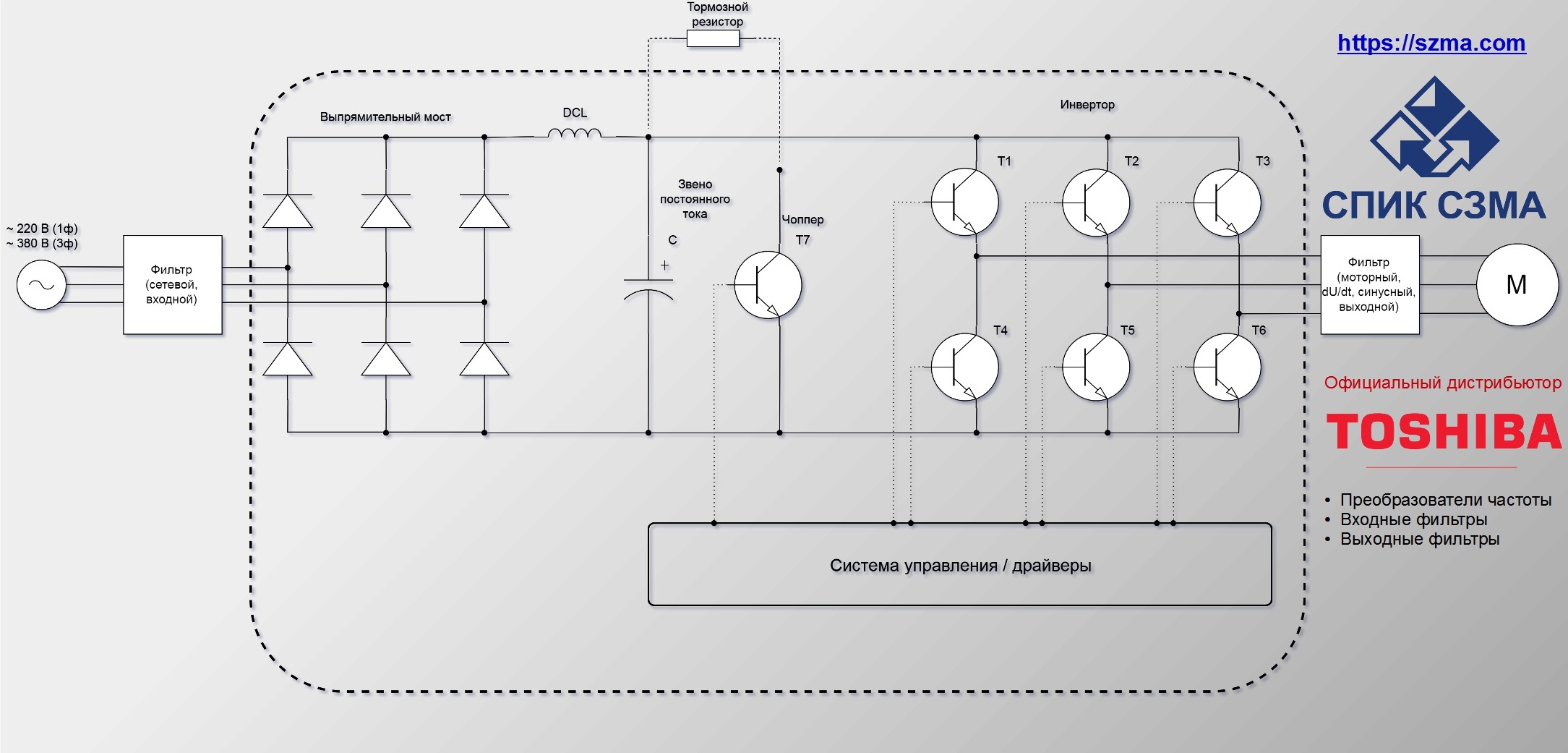 Схема преобразователя частоты
Схема преобразователя частотыНапряжение в звене постоянного тока после выпрямления трехфазного напряжения будет равно согласно формуле: 380*1,35 = 513 В.
Дроссель DCL в звене пост
Преобразователь частоты для однофазного двигателя
Помимо распространенных 3-х фазных асинхронных двигателей, на рынке предлагают однофазные моторы. Чаще всего ими являются насосы и вентиляторы. Самые популярные агрегаты в промышленности и в быту. И тут возникает вопрос? Как же ими управлять и регулировать скорость. Способов великое множество. Но самый эффективный, это когда подключают преобразователь частоты для однофазного двигателя.
Из этой статьи вы узнаете:
Однофазный асинхронный двигатель
Способы подключения мотора
Подключение преобразователя частоты и однофазного двигателя
Всем привет! С вами Гридин Семён, и в этом посте мы поговорим с вами о нюансах управления асинхронными однофазными двигателями. Какой способ управления лучше? Разберём такой вопрос — частотное управление двигателем более подробно.
Однофазный асинхронный двигатель
Наибольшее применение такие моторы нашли в быту и малом бизнесе. Они необходимы там, где нет трёхфазной сети. Мощность их ограничивается лишь частотой сети. Сами по себе аппараты маломощные, в диапазоне от 500 Ватт до 2 килоВатт.
Принцип работы однофазного двигателя заключается в смещении обмоток в пространстве относительно друг друга. Ключевым моментом является сдвиг фазы в обмотках на 120 градусов. Главным «фазосдвигателем» у нас является конденсатор. Как правило, он подключён последовательно в цепи статорной обмотки.
По конструкции моторы могут различаться. Так что, не к любому можно подключить преобразователь частоты, нужно обращать внимание прежде всего на схему подключения обмоток. Двухфазный двигатель с рабочей и пусковой обмоткой точно не сможет запуститься, совсем другой принцип работы. Мы к этому ещё вернёмся…
Способы подключения мотора
А теперь давайте рассмотрим несколько способов подключений:
- конденсаторный способ;
- частотный способ;
- фазовое управление с помощью симистора;
Какой из способов лучше всего? Знаете, всё зависит от задачи, которую нужно решить… А так на вкус и цвет, сами знаете…
Если вы мало знакомы с преобразователем частоты, можете ознакомиться в статье «Чего вы не знаете о преобразователе частоты?»
Конденсаторный способ подключений
Бюджетное подключение трехфазных моторов к однофазной сети. Просто цепляем конденсатор последовательно в цепи обмотки и превращаем аппарат из трехфазного в однофазный. Вот схема:
Сп — пусковой конденсатор, а Ср — рабочий конденсатор. Как подбирать ёмкость в этом случае я расписывать не буду. В просторах интернета есть полно информации по этому поводу.
Фазовое управление с помощью симистора
Это один из самый старых способов управления. Две обмотки двигателя подключаются параллельно, одна из них с конденсатором. К точкам обмоток соединяем симисторный регулятор. Их актуальность, по-моему мнению, ещё не пропала. Лучше всего использовать для не тяжёлых нагрузок (вентиляторы, насосы).
Важно! Учитывайте, что сим. блоки в основном предназначены для активной нагрузки. Так как мотор — это индуктивная нагрузка, поэтому активный ток делим примерно на 10. Если ток активной нагрузки равен 50, то индуктивный будет 5.
На выходе устройства формируется напряжение сетевой частоты 50 Гц и настраивается среднеквадратичное число. Таким образом мы меняем время открытого состояния симистора за период следования напряжения. Единственный недостаток: момент на валу падает относительно снижения напряжения. Вот вам пример Autonics SPK1:
Входы для регулировки скорости универсальные. Сюда можно подключить и потенциометр 1 кОм, и датчик с токовым сигналом 4-20 мА, и напряжение 0-5 В.
Частотный способ
О популярности преобразователя частоты нет смысла говорить. Так как это устройство давно известно всем. Частотный способ является основным в нашем 21 веке. Скорость регулируется с помощью ШИМ-модуляции. Достаточно сложный девайс, требующий отдельной статьи. По входному напряжению существуют как и 380 В, так и 220В. Но что же получается по выходу?
На рынке есть готовые варианты и на однофазный, и на трёхфазный электродвигатель. Просто нужно подобрать схемное решение.
Но, бывают случаи когда ПЧ с однофазным выходом не по карману. Или у вас на полке лежит трёхфазный ПЧ. Давайте рассмотрим вариант подключения мотора к преобразователю частоты.
Подключение преобразователя частоты и однофазного двигателя
В такой схеме есть ряд существенных недостатков:
- Запуск двигателя происходит при минимальной частоте 30 Гц;
- Частоту ниже 30 Гц можно регулировать, но не рекомендуется, очень вредно для движка;
- Есть нюанс с настройкой пускового напряжения, требуется немного загрублять параметр;
Для решения вопроса с подключением двух устройств поможет нам обычный дроссель. Катушка индуктивности поможет нам подавить ёмкость в схеме, таким образом давая возможность частотнику спокойно подавать синусоиду на движок. Да, вот схема:
Всё элементарно, правда. Видео, к сожалению не сохранилось. Выкладываю фото с ПЧ Eaton и однофазным насосом.
Производителей ПЧ в мире очень много. Поэтому из настроек я могу направить вас примерно и в общих чертах, если будут возникать проблемы с подключениями. Основная мысль заключается в том, что при пуске двигателя минимальное напряжение и частоту поднять вверх. Но делать это нужно осторожно и аккуратно, есть шанс спалить мотор.
И еще рекомендую ограничить минимальную частоту на 30 Гц, чтобы не допустить запуска вхолостую и перегрева. Двигатель начинает сильно греться, при пуске на низких частотах.
На этом у меня всё, друзья…
Мне очень нравится кататься на велосипеде. Ещё больше — модернизировать, добавлять что-то новое и интересное. Я совсем недавно в просторах интернета нашёл комплект электромотора для заднего колеса. Комплекты существуют, как и для переднего колеса, так и для заднего:
Загорелся идеей поставить и на свой велобайк. Может кто сталкивался? Кто-то ставил? Хочу увидеть ваше мнение… Пишите в комментариях.
Надеюсь моя статья помогла вам определиться с выбором подключения однофазного двигателя? Если что-то не дописал, напишите в комментариях, исправлю…)
P.S. Небольшой анонс следующей статьи:
Широкая доступность фотоустройств породила новую проблему — потребность в эффективных инструментах цифрового монтажа. На этом рынке традиционно доминирует профессиональный графический пакет Adobe Photoshop. Но, не стоит ограничивать свой кругозор только им. Существует огромное количество достойных фоторедакторов, покрывающих 90% повседневных нужд фотографов-любителей.
Спасибо за то, что читаете мои статьи! Всего вам доброго!!
С уважением, Гридин Семён
Частотный преобразователь для асинхронного двигателя на AVR
Дата публикации: .
В этой статье описывается универсальный трехфазный преобразователь частоты на микроконтроллере(МК) ATmega 88/168/328P. ATmega берет на себя полный контроль над элементами управления, ЖК-дисплеем и генерацией трех фаз. Предполагалось, что проект будет работать на готовых платах, таких как Arduino 2009 или Uno, но это не было реализовано. В отличие от других решений, синусоида не вычисляется здесь, а выводится из таблицы. Это экономит ресурсы, объем памяти и позволяет МК обрабатывать и отслеживать все элементы управления. Расчеты с плавающей точкой в программе не производятся.
Частота и амплитуда выходных сигналов настраиваются с помощью 3 кнопок и могут быть сохранены в EEPROM памяти МК. Аналогичным образом обеспечивается внешнее управление через 2 аналоговых входа. Направление вращения двигателя определяется перемычкой или переключателем.
Регулируемая характеристика V/f позволяет адаптироваться ко многим моторам и другим потребителям. Также был задействован интегрированный ПИД-регулятор для аналоговых входов, параметры ПИД-регулятора могут быть сохранены в EEPROM. Время паузы между переключениями ключей (Dead-Time) можно изменить и сохранить.
- Введение
- Программное обеспечение, работа и компиляция
- Генерация синуса
- Скалярное(Вольт-частотное) управление (V/f)
- Схема устройства
- Выводы
В целом, программное обеспечение основано на документации Atmel AVR447, но было значительно изменено для использования описанного здесь контроллера. Аналогично, используется ЖК-библиотека Питера Флери, большое спасибо за это красивое программное обеспечение. К сожалению, программа не совсем вписывается в ATmega48 в текущем состоянии, но может работать с небольшой оптимизацией в строковых функциях. Чтобы избежать каких-либо вопросов — нет, код не работает в (устаревшей) ATMega8. Этот МК не имеет такого функционала таймеров и прерываний.
Характеристики:
Диапазон частот: 0,6 — 162 Гц;
Выходное напряжение: 0 — 325 В постоянного тока, максимально существующее напряжение промежуточной цепи;
Формы выходного сигнала: двугорбая синусоида или синус, выбираемые перед компиляцией.
Введение
Устройство оснащено стандартным ЖК-дисплеем HD44780 работающим в 4-битном режиме и тремя простыми (цифровыми) кнопками. При включении питания MК проверяет наличие перемычки, а затем переключается на внутренний или внешний режим управления. Печатная плата управления гальванически изолирована от выходного каскада двигателя. Для этой цели используются шесть оптронов HCPL3120. Эти оптроны обеспечивают сигналы управления для классического полумостового драйвера IR2110/2113, которые, в свою очередь, приводят в действие мощные ключи на MOSFET/IGBT. Данный выходной каскад следует понимать только как пример, конечно, другие конфигурации вполне возможны.
Используются три таймера ATmega и синхронизация OC (Output Compare) всех таймеров. Один из таймеров (Таймер 1) обеспечивает прерывание переполнения, которое используется для установки ступенчатой cкорости генерации синусоиды и для синхронной записи новых значения ШИМ во все таймеры. Исходный код также содержит подробные комментарии. Скорость шага прямо пропорциональна генерируемой частоте и задается пользователем. Подробнее об этом можно найти в разделе «Генерация синуса».
Для удобства пользователя МК вычисляет частоту в Герцах и отображает ее на дисплее. Аналогично, амплитуда выходного сигнала вычисляется по длительности импульса сигналов ШИМ и показана на дисплее в процентах от напряжения промежуточного контура. Поскольку трехфазные двигатели обычно управляются с характеристикой V/f, это также вычисляется до переполнения таймеров.
Вот фотографии прототипа. Управляющая часть была собрана на макетной плате 2,54 мм, силовая часть на макетной плате с шагом 5,08 мм. МК находится под ЖК-дисплеем. Справа изображен один из моих трехфазных двигателей. Этот двигатель мощностью 550 ватт и работал с 1969 года в моем насосе. Насос полностью заржавел и вышел из строя, но двигатель все еще прекрасно работает. Он был сделан Стефаном-Верке в Хамельне.
Программное обеспечение, работа и компиляция
Программное обеспечение сконструировано таким образом, что ШИМ генератор полностью работает в прерываниях. Основной цикл программы дополняет пользовательский интерйейс и управление ЖК-дисплеем. Всего есть два режима отображения:
Режим 1 — это нормальное меню, в котором кнопка 1 может использоваться для переключения между настройками V/f и настройкой частоты. Клавиши 2 и 3 уменьшают или увеличивают выбранное значение. Курсор на дисплее ниже редактируемого значения. Функция автоповтора с ускорением упрощает настройку.
Режим 2 — активируется одновременным нажатием кнопок 1 и 2. Это меню используется для установки значений ПИД-регулятора и Dead-Time, начальных значений для V/f и частоты и для их записи в EEPROM. Опять же, клавиша 1 переключается между параметрами, а клавиши 2 и 3 используются для настройки. Одновременное нажатие 1 и 2 сохраняет значения, одновременное нажатие 1 и 3 выходит из режима без сохранения, но сохраняет значения для V/f и частоты, которые в настоящее время установлены в меню режима 1.
При работе с внешним сигналом в режиме 1 отображаются значения, но их нельзя изменить, нажав кнопку. С другой стороны, режим 2 выбирается, а также работает с внешним управлением для настройки значений ПИД и Dead-Time. Прерывание инициируется аналого-цифровым преобразователем. Оно считывает значение АЦП и сохраняет его в глобальных переменных. Конструкция «switch-case» позволяет вам использовать больше каналов АЦП, если это необходимо. DIP-вариант ATMega88/168 не дает этой возможности, здесь используются не все каналы АЦП. Однако в версии QFP еще есть каналы АЦП 6 и 7, они могут использоваться.
Описанная здесь схема позволяет применять как частотные, так и V/f-значения в качестве аналоговых сигналов. Без внешних делителей напряжения на входе ожидается в пределах 0-5 В.
Библиотеку ЖК-дисплея пришлось слегка модифицировать, поскольку здесь используется два разных порта для данных и линий управления. Изменения в lcd.h должны применяться, поскольку аппаратные выходы ШИМ МК не могут быть изменены.
Кстати, за исключением ПИД-регулятора и ЖК-подпрограмм, все части программного обеспечения были объединены в один файл, чтобы дать компилятору наилучшую возможную оптимизацию. В качестве параметра оптимизации «-О» оправдал себя. Перед компиляцией не следует забывать вводить частоту использованного кристалла в Гц в настройках проекта. В Linux файл Makefile должен быть дополнен -DF_CPU 16000000, в AS4 в разделе «Настройки проекта -> Общие». Однако использование поставляемого * .aps в качестве шаблона проекта не требуется. Пакет программного обеспечения содержит все файлы для создания проекта с помощью AVR Studio 4.
Исходный код состоит из следующих файлов:
main.c, pid.c, lcd.c
и заголовочные файлы:
vfd.h, vfdtables.h, pid.h, lcd.h
Особое внимание заслуживает vfd.h. Здесь описаны все определения проекта. Если вы посмотрите main.c, вы найдете много констант, все они будут объявлены в vfd.h. Наиболее часто используемыми переменными являются скорость шага (inco), указатель на таблицу синусов (sinTableIncrement), амплитуду (amplitude) и отношение V/f (VperHz). Эти переменные хранятся непосредственно в регистрах для увеличения рабочей скорости. Вероятно, это было бы необязательно, но в качестве примера, использующего переменные прямого реестра, это может быть полезно и для других проектов. Другая переменная прямого регистра (fastFlags). Эта структура используется поразрядно, но здесь используются только 4 бита. Один бит для переключения между внешним и внутренним управлением, затем 2 бита для используемой формы сигнала (либо «неопределенный», либо «синус»), а затем еще один бит для желаемого направления вращения. Параметры отображения вычисляются с использованием целочисленной математики, так как числа с плавающей точкой следует избегать. Регулярное прерывание таймера вызывает процедуру «SpeedController» (после 200 переполнений таймера). Здесь, во внешнем режиме управления, вызывается ПИД-регулятор и вычисляются параметры отображения. Индикация ЖК-дисплея выполнена с использованием командного интерпретатора.
После сброса сначала инициализируются ЖК-дисплей и порты, и все предварительно назначеные переменные. За этим следует инициализация таймеров, прерываний, АЦП и ПИД-регулятора. После проверяется состояние перемычек и считывается EEPROM. Наконец, разрешается глобальное прерывание и, следовательно, начинается генерация частоты.
Во время процесса диагностические коды выводятся на ЖК-дисплей, чтобы сообщать о любых проблемах с «залипшими» клавишами или другими проблемами. В конце следует основной цикл, в котором запущен «командный интерпретатор» (execCommand).
Командный интерпретатор не делает ничего, кроме как сначала проверяет нажатые клавиши. Если он найдет одну или несколько нажатых клавиш, будет выполнена одна из функций. После этого ЖК-дисплей будет обновлен. Второй уровень команд делает это для расширенного меню, так как он работает одинаково. Все настройки гарантируют, что значения не могут быть «за пределом», так как это часто приводит к фатальным последствиям. Так, например, Невозможно переключить рабочую частоту от 0,1 Гц непосредственно до 162 Гц или установить «Dead-Time» в ноль.
Еще одно замечание по AVR Studio 4, последняя версия 4.19, чтобы избежать ошибок компиляции, вы должны использовать AVR Toolchain 3.3.1 — 1020, иначе вас будут беспокоить ошибки. В качестве альтернативы WinAVR подходит — например, версия 20100110.
Генерация синуса
Значения синусоид для трех фаз (U, V и W) сохранены в массиве, который находится в файле «vfdtables.h». Выходы фаз в настоящее время обозначаются L1, L2 и L3, а также R, S и T. Сгенерированная частота определяется тем, после скольких вызовов в ISR «TIMER1_CAPT» указатель увеличится в таблице. Если «inco», например «1», указатель в таблице увеличивается после 255 проходов, а следующее значение таблицы загружается в таймеры. Так как таблица имеет длину 192, это приводит к выходной частоте 0,635 Гц, что является следствием частоты повторения ШИМ 31,25 кГц/256 = 8,192 мс * 192. Если «inco» 255, следующее значение таблицы уже загружается после 1/31,25 кГц = 32 мкс, и это приводит к выходной частоте 1/(32мкс * 192) = 162,7 Гц. Направление вращения изменяется путем замены значений для V и W перед загрузкой таймеров. Доступ к таблице и загрузка таймеров ШИМ выполняются в процедуре прерывания переполнения таймера 1. Таким образом, эта процедура представляет собой ядро генерации синуса.
Для работы полумостов требуется использование паузы «Dead-Time», благодаря чему ни верхний, ни нижний ключи полумоста не могут быть включены одновременно. Без этой паузы происходило бы короткое замыкание, что ни в коем случае нельзя допустить. (Этот случай часто упоминается как «прострел»). Поскольку «Dead-Time» сильно зависит от используемых драйверов, пауза была сделана регулируемой. Процедура InsertDeadband вычисляет требуемое «Dead-Time» для каждого таймера перед записью значений ШИМ.
«Dead-Time» хранится в EEPROM. По соображениям безопасности используется минимальное значение вместо недопустимого, если есть ошибки чтения EEPROM или установлено слишком малое значение. Слишком большое значение «Dead-Time» не вредно, но ограничивает диапазон использования ШИМ и эффективность привода. Разумеется, при первоначальном запуске рекомендуется установить большое значение «Dead-Time», а затем уменьшить его при соблюдении текущего потребления. Единица «Dead-Time» (DEAD_TIME_HALF), отображаемая на дисплее, представляет собой время одного цикла МК. Полученное «Dead-Time» на полумосте в два раза выше, чем цикл МК. В показанном примере было использовано значение 20, что привело к значению «Dead-Time» (2*20*62,5 нс = 2500 нс). Для быстрых MOSFET или IGBT это значение может быть уменьшено. Потребление тока можно измерить на шунте R7. Внимание: эта часть не отделена от сети гальванически и с ней следует обращаться с осторожностью. Прямое соединение между GNDI и PE неизбежно приводит к повреждению элементов при подаче питания.
Форма сигнала фаз адаптирована к работе двигателей в приведенной таблице. Другие формы сигнала могут быть сформированы путем замены значений таблицы. Опция «#define PURE_SINE_DRIVE» теперь находится в vfd.h. В этом случае генерируются 3 стандартные синусоиды с фазовым сдвигом на 120° без типичных двугорбых синусоид для BLDC. Если МК работает с частотой, отличной от 16 МГц, параметр «DIVISIONEER» в файле «vfd.h» также должен быть изменен так, чтобы дисплей работал правильно. Если вам нужен только источник переменного тока, вы должны заменить таблицу на реальные значения синуса (как указано в обновлении) и создать только два выходных каскада. Между двумя выходами преобразователя будет регулируемый потенциал переменного тока.
При вращении двигателя с полной скоростью не следует изменять направление вращения на противоположное. В любом случае рекомендуется остановить двигатель, а затем изменить направление вращения.
Скалярное(Вольт-частотное) управление (V/f)
Скалярное управление является наиболее часто используемым методом для преобразователей частоты. При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях. На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями.
Характеристика «Вольт/частота» означает, что двигатель работающий на 100% частоте может работать с полным номинальным напряжением, но с понижением частоты также должно быть отрегулировано рабочее напряжение. Например на двигатель работающий на 50% от номинальной частоты не должно подаваться более 50% рабочего напряжения и т. Д. Точные значения различны и поэтому должны быть взяты из документации на двигатель или определены путем проб и ошибок.
Индикация обеспечивает достигнутый крутящий момент («мощность») двигателя. Он должен быть не больше, чем может обеспечить двигатель. Громкий шум, например, знак слишком большого напряжения, отношение V/f должно быть меньше. Тем не менее, часто достаточно предоставить двигателю 100% рабочее напряжение при номинальной частоте (например, 50 Гц), а на пониженной частоте МК также пропорционально уменьшит среднее напряжение на обмотках двигателя.
Схема устройства
В схеме не используются какие-либо специальные компоненты. 5-вольтовый DC-DC преобразователь используется от зарядки мобильного телефона, а в случае 18-Вольтового преобразователя был использован небольшой источник питания для светодиодных светильников, где путем изменениея номиналов компонентов было увеличено напряжение с 12 до 18 Вольт. Требуемый ток зависит от выбранной микросхемы драйвера полумоста и ключей, находится в пределах около 150 мА для всех трех каналов. Как всегда, хорошая гальваническая развязка максимально важна для компонентов драйвера. Импульсы в нагрузке, вызванные переключением затворов, должны сглаживаться конденсаторами, как показано на схеме. 5-вольтовая часть питания потребляет около 40-80 мА без подсветки ЖК-дисплея, а львиная доля идет на светодиоды оптопар. Импульсные источники питания (например, зарядное от мобильного телефона) питаются от сети переменного тока. Так как в схеме имеется диодный мост B1, можно удалить внутренние диодные мосты этих источников питания и подключится уже к сети постоянного тока V+.
Известно, что частотные преобразователи генерируют высокочастотные импульсы поэтому необходимо исключить попадание их в бытовую сеть.Также желательно, чтобы более длинные провода от выхода преобразователя до потребителя были экранировны, либо проходили через фильтр непосредственно на выходе преобразователя. Частота ШИМ составляет около 31 кГц и имеет крутые фронты, поэтому необходимо уделить не мало внимания для подавления этих помех. Конденсаторы C15 — C18 должны быть класса X2, причем C17/C18 типа Y. Подходящими являются специально предназначенные конденсаторы для подавления помех, если они имеют необходимый диэлектрический запас прочности. Как видно на рисунке, я использовал готовый сетевой фильтр с разъемом для шнура питания. Шунт R7 (шунт) должен выдерживать рабочий ток двигателя, я использовал 5-ваттный керамический резистор. Высокий пусковой ток, когда конденсатор постоянного тока не заряжен, ограничен R11, высокоамперный NTC, который также распространен в блоках питания ПК. здесь хорошо подходит тип 644, например, Philips.
Кстати, 18 Вольт используются только потому, что доступные мне в данный момент оптопары типа 3120 требуют напряжения питания не менее 16 вольт. Если бы у меня были оптопары типа HCPL3180, 12 Вольт было бы достаточно.
Показанный на схеме выходной каскад (показана только одна фаза, две другие идентичны) имеет встроенную токовую защиту, реализованную на шунте R7 и транзисторах T1 и T2. Если ток потребления слишком высок (около 2 А), T1 открывается и включает T2. Высокий уровень на коллекторе T2 активирует вход отключения микросхемы драйвера. Дросселя L4 и L3 должны быть сильноточными, имеющими запас по максимальному току двигателя.
Конденсаторы, подключенные параллельно кнопкам, предотвращают поступление помех от соседних линий LCD и PWM и обеспечивают минимальный ток на кнопках. Кнопки циклически опрашиваются командный интерпретатором и, следовательно, не требуют отдельной функции антидребезга.
Рядом с ISP разъемом имеется дополнительный разъем SV1. К его контактам могут быть подключены два аналоговых сигнала (контакты 6 и 8). Контакт 6 (5 канал АЦП) управляет отношением V/f, сигнал управления частотой подается на контакт 8 (4 канал АЦП). Контакт 4 переключает между внешним (АЦП) и внутренним (кнопка и ЖК-дисплей) управлением. Когда контакт замкнут на землю, система переключается на внешнее управление. Контакт 2 используется для изменения направления вращения двигателя.
Важным замечанием является различие между GND и GNDI: GND — это часть питания управляющей электроники, отделенная от сети, в то время как GNDI подключается напрямую к сети. Ни при каких обстоятельствах нельзя соединять GND и GNDI! Наоборот, в любом случае следует соблюдать достаточные безопасные расстояния. Поэтому в моем прототипе плата управления и питания полностью отделены друг от друга и соединены только платой оптопар.
Выводы
Из-за простоты управляющей части и использования стандартных компонентов представленный преобразователь частоты является достойным проектом, чтобы продемонстрировать возможности современных микроконтроллеров и поэкспериментировать с управлением двигателями. В зависимости от используемого выходного каскада возможно управлять другими типами двигателей, например, от электромобилей, жестких дисков, зеркальных головок лазерных принтеров. Изменение частоты ШИМ, производится в подпрограмме TimersInit(). Другие настройки прескалера для всех 3-х таймеров могут изменены с помощью битов «CSx1», в настоящее время установленных на 0. Конечно, MК также может работать с внутренним генератором 8 МГц. Это дает еще два свободных контакта порта, например, для осуществления обратной связи по току или контроль скорости.
Внешнее управление аналоговыми входами позволяет использовать привода серводвигателей, таких как «Capstan» и, например этими средствами стабилизировать PLL. Встроенный ПИД-регулятор с регулируемыми параметрами позволяет адаптировать его к широкому кругу задач. В любом случае мне интересно, что читатель может подумать о дополнениях, и я с нетерпением жду предложений и идей. Еще одно замечание: стоит сравнить цены различных возможных контроллеров. Зачастую «большой» ATmega328 теперь дешевле купить, чем его младших братьев. Если используется другой контроллер (Mega88, 168 и 328 все совместимы друг с другом), это следует учитывать в настройках проекта.
Автор: Matthias S
| Файлы к статье «Частотный преобразователь для асинхронного двигателя на AVR» | |
| Описание:
Исходный код(Си), схема Eagle |
|
| Размер файла: 202.16 KB Количество загрузок: 1 132 | Скачать |