


Скольжение асинхронного двигателя — Википедия
Материал из Википедии — свободной энциклопедии
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
s=(n1−n)/n1{\displaystyle s=(n_{1}-n)/n_{1}},
где n{\displaystyle n} — скорость вращения ротора асинхронного двигателя, об/мин
n1{\displaystyle n_{1}} — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
n1=60×f/p{\displaystyle n_{1}=60\times f/p},
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
- s=(n1−n1)/n1=0{\displaystyle s=(n_{1}-n_{1})/n_{1}=0}.
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1{\displaystyle n_{1}} и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором n=n1{\displaystyle n=n_{1}}, что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы асинхронного двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При s=0{\displaystyle s=0} поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
Генераторный режим
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой n>n1{\displaystyle n>n_{1}}, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне −∞<s<0{\displaystyle -\infty <s<0}, то есть оно может принимать любые отрицательные значения.
Режим торможения противовключением
В режиме электромагнитного торможения частота вращения ротора является отрицательной, поэтому скольжение принимает положительные значения больше единицы
- s=[n1−(−n)]/n1=(n1+n)/n1>1{\displaystyle s=[n_{1}-(-n)]/n_{1}=(n_{1}+n)/n_{1}>1}
Таким образом, скольжение в режиме торможения противовключением может изменяться в диапазоне 1<s<+∞{\displaystyle 1<s<+\infty }.
Критическое скольжение
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Литература
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
Скольжение асинхронного двигателя — Википедия
Материал из Википедии — свободной энциклопедии
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
s=(n1−n)/n1{\displaystyle s=(n_{1}-n)/n_{1}},
где n{\displaystyle n} — скорость вращения ротора асинхронного двигателя, об/мин
n1{\displaystyle n_{1}} — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
n1=60×f/p{\displaystyle n_{1}=60\times f/p},
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода
Холостой ход асинхронного двигателя имеет место в том случае, если на валу отсутствует нагрузка в виде рабочего органа или редуктора. При сборке нового двигателя всегда проводится испытания холостого хода, для того чтобы определить потери в подшипниках, вентиляторе и магнитопроводе, а также узнать значения намагничивающего тока. Во время холостого хода скольжение составляет: S=0,01÷0,08.
Следует заметить, что так же существует режим идеального холостого хода, при котором n2=n1, что практически реализовать невозможно, даже если учесть, что нет силы трения в подшипниках. На самом деле суть заключается в том, что асинхронному двигателю необходимо, чтобы ротор отставал от магнитного вращающегося поля статора. При отставании поле статора индуцирует магнитное поле в ротор, что заставляет его вращаться за полем статора.
Критическое скольжение
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Литература
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
Скольжение асинхронного двигателя Википедия
s=(n1−n)/n1{\displaystyle s=(n_{1}-n)/n_{1}},
где n{\displaystyle n} — скорость вращения ротора асинхронного двигателя, об/мин
n1{\displaystyle n_{1}} — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
n1=60×f/p{\displaystyle n_{1}=60\times f/p},
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
- s=(n1−n1)/n1=0{\displaystyle s=(n_{1}-n_{1})/n_{1}=0}.
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1{\displaystyle n_{1}} и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором n=n1{\displaystyle n=n_{1}}, что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы асинхронного двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При s=0{\displaystyle s=0} поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
Генераторный режим
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой n>n1{\displaystyle n>n_{1}}, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне
36. Скольжение асинхронного двигателя.
Как известно, ротор асинхронного двигателя вращается в ту же сторону, что и магнитное поле со скоростью, несколько меньшей скорости вращения поля, так как только при этом условии в обмотке ротора будут индуцироваться ЭДС и токи и на ротор будет действовать вращающий момент.
Обозначим
скорость вращения поля (синхронная
скорость) через  а
скорость вращения ротора через 2
а
скорость вращения ротора через 2 Тогда
разность 3
Тогда
разность 3 называемая
скоростью скольжения, будет представлять
собой скорость ротора относительно
поля, а отношение скорости скольжения
к синхронной скорости, выраженное в
процентах, называют скольжением
называемая
скоростью скольжения, будет представлять
собой скорость ротора относительно
поля, а отношение скорости скольжения
к синхронной скорости, выраженное в
процентах, называют скольжением  4
4
Выразим
скольжение s через угловые
скорости вращения
поля и ротора 

откуда
Полученные выражения подставим в формулу скольжения (5.7)
Выясним влияние скольжения на мощность, развиваемую двигателем.
Пусть  мощность,
потребляемая двигателем,
мощность,
потребляемая двигателем,  мощность,
развиваемая ротором при его вращении.
Тогда
мощность,
развиваемая ротором при его вращении.
Тогда

 длина окружности ротора,
R — его радиус,
длина окружности ротора,
R — его радиус,  и
и  —
силы, действующие на ротор (соответственно
электромагнитная и механическая). Тогда
—
силы, действующие на ротор (соответственно
электромагнитная и механическая). Тогда
Взяв
отношение  получим:
получим:
но  (обе
силы электромагнитные и в установившемся
режиме вращения действие равно
противодействию), тогда
(обе
силы электромагнитные и в установившемся
режиме вращения действие равно
противодействию), тогда

откуда окончательно имеем:

Из
полученного соотношения следует, что
мощность  развиваемая
ротором асинхронного двигателя, зависит
от скольжения 5.
развиваемая
ротором асинхронного двигателя, зависит
от скольжения 5.
Если
скольжение выражать в процентах, то  от
мощности
от
мощности  потребляемой
двигателем из сети, преобразуется в
механическую мощность, а
остальные
потребляемой
двигателем из сети, преобразуется в
механическую мощность, а
остальные  мощности
мощности  расходуются
на покрытие потерь в двигателе, поэтому
для получения высокого КПД двигателя
скольжение необходимо делать возможно
меньшим.
расходуются
на покрытие потерь в двигателе, поэтому
для получения высокого КПД двигателя
скольжение необходимо делать возможно
меньшим.
На практике у двигателей мощностью от 1 до 1000 кВА при номинальной нагрузке скольжение составляет 3-6%, а при больших мощностях — 1-3%. Так, при скоростях вращения магнитного поля 3000, 1500 и 1000 об/мин скорости вращения ротора обычно имеют соответственно значения 2800,1410 и 930 об/мин.
37. Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
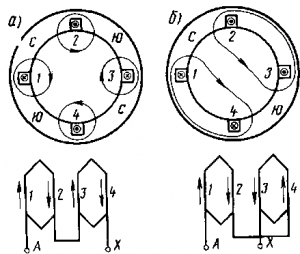 Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
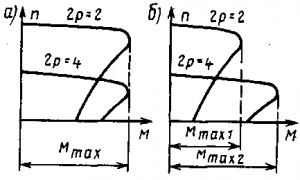 Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
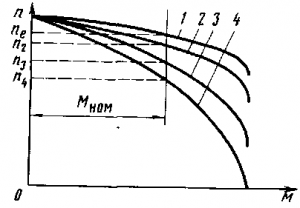 Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
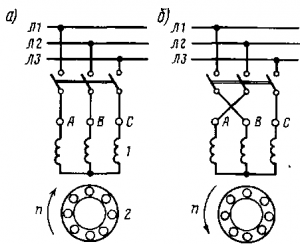 Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Скольжение электродвигателя
В процессе взаимодействия магнитного поля и тока в роторе асинхронного электродвигателя создается вращающий момент, который позволяет уровнять скорость статора, ротора и вращения электромагнитного поля. Величина скольжения электродвигателя характеризуется скоростью вращения ротора, статора и магнитного поля.
От чего зависит величина скольжения электродвигателя
- Как правило, скольжение относительно невелико при работе электродвигателя с номинальной нагрузкой. Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
- Асинхронные электродвигатели не могут достичь синхронной скорости даже, если отсоединить механизм. Проводники ротора никогда не будут пересекаться с магнитным полем, в них не будет ЭДС, соответственно не будет и тока. При этом асинхронный момент будет равен нулю.
- В момент пуска в обмотку ротора поступает ток, соответствующий частоте сети. По мере ускорения частота тока будет определена скольжением. При этом сопротивление ротора будет зависеть от частоты тока. Индуктивное сопротивление будет возрастать по мере увеличения частоты тока.
- Величины эквивалентного сопротивления изменяются в соответствии с законами физики. Если скольжение электродвигателя уменьшается, сопротивление соответственно увеличивается.
- При пусковом моменте до развития скольжения в пределах 0,15 сила сопротивления уменьшается незначительно. При дальнейшей работе наоборот – быстро уменьшается. Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.
Определение величины скольжения электродвигателя
Предопределяющим моментом в прямой зависимости от скольжения является начальное значение того момента, когда электродвигатель остается еще в неподвижном состоянии. Максимальное значение скольжения называется критическим.
Конкретные расчеты производят специалисты завода-изготовителя, и они указаны в соответствующих технических характеристиках, прилагаемых к электродвигателю при покупке. При увеличении активного сопротивления только ротора увеличивается значение критического скольжения и уменьшается скорость вращения вала. Изменить данные параметры можно путем использования дополнительного сопротивления, которое вводится в цепь обмотки ротора.
Просмотров: 3155
Дата: Воскресенье, 15 Декабрь 2013
Скольжение асинхронного двигателя | Онлайн журнал электрика
В итоге взаимодействия магнитного поля с токами в роторе асинхронного мотора создается крутящий электрический момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного мотора характеризуется величиной скольжения s = (n1 — n2) / n2, где n1— синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного мотора, об/мин. При работе с номинальной нагрузкой скольжение обычно не достаточно, так для электродвигателя, к примеру, с n1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно:s = ((1500 — 1460) / 1500 ) х 100 = 2,7%
Асинхронный движок не может достигнуть синхронной скорости вращения даже три отсоединенном механизме, потому что при ней проводники ротора не будут пересекаться магнитным полем, в их не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В исходный момент запуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного мотора: f2 = s х f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора находится в зависимости от частоты тока в нем, при этом чем больше частота, тем больше его индуктивное сопротивление. С повышением индуктивного сопротивления ротора возрастает сдвиг фаз меж напряжением и током в обмотках статора.
При пуске асинхронных движков коэффициент мощности потому существенно ниже, чем при обычной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного мотора с конфигурацией скольжения меняется по сложному закону. При уменьшении скольжения в границах 1 — 0,15 сопротивление возрастает, обычно, менее чем в 1,5 раза, в границах от 0,15 до sном в 5-7 раз по отношению к исходному значению при пуске.
Ток по величине меняется назад пропорционально изменению эквивалентного сопротивления Таким макаром, при пуске до скольжения порядка 0,15 ток опадает некординально, а в предстоящем стремительно миниатюризируется.
Момент вращения электродвигателя определяется величиной магнитного потока, током и угловым сдвигом меж ЭДС и током в роторе. Любая из этих величин в свою очередь находится в зависимости от скольжения, потому для исследования рабочих черт асинхронных движков устанавливается зависимость момента от скольжения и воздействия на него подводимого напряжения и частоты.
Момент вращения может быть также определен по электрической мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и назад пропорциональная квадрату частоты.
Соответствующими значениями момента зависимо от скольжения (либо скорости) являются изначальное значение момента (когда электродвигатель еще неподвижен), наибольшее значение момента (и соответственное ему сколь жение, называемое критичным) и малое значение момента в пределе скоростей от недвижного состояния до номинальной.
Значения момента для номинального напряжения приводятся в каталогах для электронных машин. Познание малого момента нужно при расчете допустимости запуска либо самозапуска механизма с полной нагрузкой механизма. Потому его значение для определенных расчетов должно быть или определено, или получено от завода-поставщика.
Величина наибольшего значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не находится в зависимости от величины сопротивления ротора.
Критичное скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обосновано активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Повышение только активного сопротивления ротора сопровождается повышением критичного скольжения и перемещением максимума момента в область более больших скольжений (наименьшей скорости вращения). Таким методом может быть достигнуто изменение черт моментов.
В асинхронных двигателях с фазным ротором изменение момента при разных скольжениях осуществляется при помощи сопротивления, вводимого в цепь обмотки ротора. В асинхронных движках с короткозамкнутым ротором изменение момента может быть достигнуто за счет внедрения движков с переменными параметрами либо при помощи частотных преобразователей.
Школа для электрика
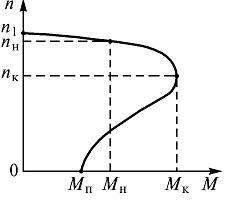
Механическая характеристика асинхронного двигателя. Формула Клосса.
| Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валуn = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 — n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Рис. 1. Механическая характеристика асинхронного двигателя Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристикиполучаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики. Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода. |
Выражение для электромагнитного момента (*) справедливо для любого режима работы и может быть использовано для построения зависимости момента от скольжения при изменении последнего от +∞ до −∞ (рис. 2.14).
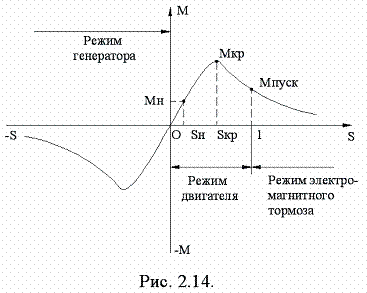
Рассмотрим часть этой характеристики, соответствующая режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Mпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Mкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя
Mкр/Mн=λ=2÷3.
Из анализа формулы (*) на максимум можно получить соотношения для Mкр и Sкр
Mкр=Cм | U12 | ; Sкр≈ | R2 | . |
2X2 | X2 |
Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1 снижается перегрузочная способность асинхронного двигателя.
Из выражения (*), разделив M на Mкр, можно получить формулу, известную под названием «формула Клосса», удобную для построенияM=f(S).
| M | = | 2 |
Mкр | S/Sкр+Sкр/S |
Если в эту формулу подставить вместо M и S номинальные значения момента и скольжения (Mн и Sн), то можно получить соотношение для расчета критического скольжения.
 .
.
Участок характеристики (рис. 2.14), на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (Mн, Sн). В пределах изменения скольжения от 0 до Sкр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Участок характеристики, на котором скольжение изменяется отSкрдо 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
Энергетическая диаграмма АД
Преобразование активной мощности в двигателе связано с потерями. Они делятся на электрические, магнитные и механические.
Отобразим энергетическую диаграмму двигателя, описывая энергетические процессы, протекающие в двигателе.

 –активная
мощность, потребляемая двигателем из
сети.
–активная
мощность, потребляемая двигателем из
сети.

Часть
мощности  теряется
на нагрев обмотки статора
теряется
на нагрев обмотки статора .
Другая часть мощности рассеивается на
магнитные потери в сердечнике статора
.
Другая часть мощности рассеивается на
магнитные потери в сердечнике статора .
.
Остальная мощность с помощью основного магнитного потока передается из статора в ротор и является электромагнитной мощностью двигателя.
Часть
электромагнитной мощности расходуется
на нагрев обмотки ротора. Магнитные
потери в сердечнике ротора малы и  ,
а частота
,
а частота .
Поэтому магнитные потери в сердечнике
ротора не указываются.
.
Поэтому магнитные потери в сердечнике
ротора не указываются.
 –механическая
мощность двигателя. Механические потери
обусловлены трением вала ротора в
подшипниках и сопротивлением воздуха.
–механическая
мощность двигателя. Механические потери
обусловлены трением вала ротора в
подшипниках и сопротивлением воздуха.
Уравнение баланса активной мощности имеет вид:


При проектировании и эксплуатации АД представляет интерес соотношение между активной и реактивной мощностями, называемое коэффициентом мощности:
Q1=const, не зависит от нагрузки
Р1 повышается с повышением нагрузки, а, следовательно, повышается cosφ
