


Синхронный двигатель
Принцип действия синхронного двигателя. Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя. Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток . Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС
. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС  и
и 
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС  , которая направлена против напряжения сети
, которая направлена против напряжения сети  . Сумма ЭДС
. Сумма ЭДС  с учётом падения напряжения на активном сопротивлении обмотки статора
с учётом падения напряжения на активном сопротивлении обмотки статора  уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.

Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента
Уравнение второго закона Кирхгофа для обмотки статора. В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
 , (4.4)
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети =0).
Векторная диаграмма синхронного двигателя. Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол  от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя. Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор , где
, где  — угол сдвига фаз между током и ЭДС.
— угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок 
 —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
—масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя .
.
Механический момент на валу двигателя ,
,
(4.5)
где 
 — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
— максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.Угловая и механическая характеристики. Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой
положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться. Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя. Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС  остаются неизменными (рис. 14.17).
остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что , конец вектора токаскользит по прямой cd.
, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), = , ток
, ток  отстаёт по фазе
отстаёт по фазе  от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
 и ток
и ток  является чисто активным.
является чисто активным.
Наоборот, при перевозбуждении  и вектор тока
и вектор тока  опережает по фазе вектор напряжения ,
опережает по фазе вектор напряжения , , ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при
, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при  .
.
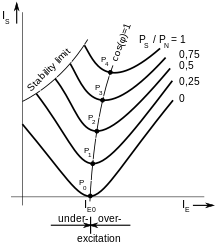
U – образные характеристики. Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем  , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
(рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.

Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia(определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia(определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей. Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Синхронный двигатель — Synchronous motor

 Маленький синхронный двигатель с встроенным понижающей шестерней из микроволновой печи
Маленький синхронный двигатель с встроенным понижающей шестерней из микроволновой печиСинхронный электродвигатель является двигателем переменного тока , в котором, в стационарном состоянии , вращение вала синхронизировано с частотой питающего тока ; период вращения точно равен целому числу переменного тока циклов. Синхронные двигатели содержат многофазные переменный ток электромагниты на статоре двигателя , которые создают магнитное поле , которое вращается во время с колебаниями тока линии. Ротор с постоянными магнитами или электромагнитами превращается в ноге с полем статора с той же скоростью , и , как следствие, обеспечивает второе синхронизированный вращающийся магнит поле любого электродвигателя переменного тока . Синхронный двигатель называется дважды подается , если она снабжена независимо возбуждаемых многофазных переменного тока электромагнитов на обоих ротора и статора.
Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателя переменного тока. Различие между этими двумя типами является то , что синхронный электродвигатель вращается со скоростью запертой на частоту линии , так как он не зависит от тока индукции , чтобы произвести магнитное поле ротора. В противоположность этому , асинхронный двигатель требует скольжения : ротор должен вращаться немного медленнее , чем чередований переменного тока для того , чтобы вызвать ток в обмотке ротора. Малые Синхронные двигатели используются в приложениях синхронизации , например, в синхронных часов , таймеров в приборах, магнитофонов и прецизионных следящих , в котором двигатель должен работать при точной скорости; точность скорости является то , что от частоты линии электропередачи , которая тщательно контролируется в большой взаимосвязанных системах сетки.
Синхронные двигатели доступны в самовозбуждающихся суб-дробно размеров мощности для мощных промышленных размеров. В дробной диапазоне лошадиных сил, большинство синхронных двигателей используются там , где требуется точная константа скорости. Эти машины обычно используются в аналоговых электрических часов, таймеров и других устройств , где требуется правильное время. В более высоких промышленных размерах мощности, синхронный двигатель обеспечивает две важных функции. Во- первых, это очень эффективное средство преобразования энергии переменного тока для работы. Во- вторых, он может работать на ведущих или единице коэффициента мощности и тем самым обеспечить коррекцию коэффициента мощности.
Тип
Синхронные двигатели попадают под более общую категорию синхронных машин , которая также включает синхронный генератор. Генератор действие будет наблюдаться , если поле полюса «погнало вперед результирующего потока в воздушном зазоре в поступательном движении тягача ». Мотор действие будет наблюдаться , если поле полюсов «вытащили за результирующего потока в воздушном зазоре с помощью задерживающего крутящего момента от вала нагрузки ».
Есть два основных типа синхронных двигателей в зависимости от того, как ротор намагничивается: невозбужденный и постоянный током возбужденный .
Невозбужденные двигатели
 Однофазное 60 Гц 1800 оборотов в минуту синхронный двигатель для Teletype машины, невозбужденном типа ротора, изготовленного с 1930 по 1955 год .
Однофазное 60 Гц 1800 оборотов в минуту синхронный двигатель для Teletype машины, невозбужденном типа ротора, изготовленного с 1930 по 1955 год .В не-возбужденных двигателях, ротор выполнен из стали. При синхронной скорости она вращается синхронно с вращающимся магнитным полем статора, так что он имеет почти постоянное магнитное поле через него. Внешнее поле статора намагничивает ротор, вызывая магнитные полюса , необходимых , чтобы включить его. Ротор выполнен из высокотемпературной сохраняемости стали , такие как кобальт стал. Они изготавливаются в постоянных магнитов , нежелания и гистерезисных конструкций:
Нежелание двигатели
Они имеют ротор , состоящий из твердой разливки стали (с выступающими) заметные зубчатые полюса. Как правило , имеется меньше , чем ротор полюс статора , чтобы минимизировать пульсации вращающего момента и для предотвращения полюсов от всех выравнивая одновременно-положения , которое не может генерировать крутящий момент. Размер воздушного зазора в магнитной цепи и , таким образом, нежелание минимален , когда полюса выравниваются с (вращающимся) магнитным полем статора и возрастает с увеличением угла между ними. Это создает вращающий момент , перемещающий ротор в соответствие с ближайшим полюсом поля статора. Таким образом , при синхронной скорости ротора «заблокирован» с вращающимся полем статора. Это не может запустить двигатель, так полюса ротора обычно имеют короткозамкнутые обмотки , встроенные в них, чтобы обеспечить крутящий момент ниже синхронной скорости. Машина запускается как асинхронный двигатель , пока он не приблизится к синхронной скорости, когда ротор «тянет» и замки к вращающемуся полю статора.
Нежелание конструкция двигателя имеет рейтинги , которые варьируются от маломощных (несколько ватт) до 22 кВт . Очень маленькие реактивные двигатели имеют низкий крутящий момент , и , как правило , используются для измерительных приложений. Умеренный крутящий момент, мульти-лошадиные силы двигателей с короткозамкнутым ротором использовать конструкцию с зубчатыми роторами. При использовании с регулируемой подачей частоты мощности, все двигатели в системе привода можно управлять на точно такую же скорости. Частоты источника питания определяет рабочую скорость двигателя.
гистерезисные двигатели
Они имеют прочный гладкий цилиндрический ротор, литой высокие коэрцитивную магнитную «жесткий» кобальт стал. Этот материал имеет широкую петлю гистерезиса (высокий коэрцитивности ), то есть , как только он намагничивается в заданном направлении, он требует большого обратного магнитного поля для перемагничивания. Вращающееся поле статора вызывает каждый малый объем ротора , чтобы испытать реверсивное магнитное поле. Из — за гистерезиса фаза намагниченности отстает от фазы приложенного поля. Результатом этого является то, что ось магнитного поля , наводимого в роторе отстает от оси поля статора на постоянный угол б, производя вращающий момент , как ротор пытается «догнать» с полем статора. До тех пор пока ротор находится ниже синхронной скорости, каждая частица ротора испытывает реверсивный магнитное поле на частоте «скольжения» , который приводит его вокруг своей петли гистерезиса, в результате чего поле ротора запаздывать и создавать вращающий момент. Существует 2-полюсный низкое магнитное сопротивление структуры бар в роторе. Когда ротор приближается к синхронной скорости и скольжение стремится к нулю, это намагничивает и выравнивает с полем статора, в результате чего ротора «блокировки» к вращающемуся полю статора.
Одним из основных преимуществ гистерезиса двигателя является то, что, так как угол задержки δ не зависит от скорости, он развивает постоянный крутящий момент от запуска до синхронной скорости. Поэтому самозапуск и не требует индукции обмотки, чтобы запустить его, хотя многие проекты имеют короткозамкнутую проводящую обмотку структуры, встроенную в роторе, чтобы обеспечить дополнительный крутящий момент при пуске.
Гистерезис моторы производятся в суб-дробных оценок лошадиных сил, в первую очередь как серводвигателей и синхронизации двигателей. Более дорогой , чем тип нежелание гистерезисные двигатели используются там , где требуется точная константа скорости.
Постоянные магниты двигатели
С постоянными магнитами синхронный двигатель (PMSM) использует постоянные магниты , встроенные в стали ротора для создания постоянного магнитного поля. Статора несет обмотки , подключенные к источнику переменного тока , чтобы произвести вращающееся магнитное поле. При синхронной скорости полюса ротора блокировки с вращающимся магнитным полем. Постоянный магнит синхронных двигателей аналогичны бесщеточные двигатели постоянного тока .
Из-за постоянное магнитное поле в роторе они не могут использовать индукционные обмотки для запуска. Эти двигатели требуют источника питания переменной частоты для запуска.
Основное различие между постоянными магнитами синхронного двигателем и асинхронным двигателем является ротором.
двигатели с постоянными магнитами были использованы в качестве безредукторных лифтовых двигателей с 2000 года.
DC-возбужденные моторы
 DC-возбуждаться двигатель 1917. Возбудитель хорошо видно на задней части машины.
DC-возбуждаться двигатель 1917. Возбудитель хорошо видно на задней части машины.Обычно изготавливается в больших размерах (больше , чем около 1 лошадиной силы или 1 кВт) , эти двигатели требуют постоянного тока (DC) подается на ротор для возбуждения. Это наиболее прямолинейно подается через контактные кольца , но бесщеточный также могут быть использованы индукции переменного тока и расположение выпрямителя. Постоянный ток может подаваться от отдельного источника постоянного тока или от генератора постоянного тока , непосредственно соединенного с валом двигателя.
синхронная скорость
Синхронной скорости синхронного двигателя задается:
в оборотах в минуту , с помощью:
- Nsзнак равно60епзнак равно120еп{\ Displaystyle N_ {s} = {60 \ гидроразрыва {F} {P}} = {120 \ гидроразрыва {F} {р}}}
а также в радиан · с -1 , по:
- ωsзнак равно2πеп{\ Displaystyle \ омега _ {s} = 2 \ р {\ гидроразрыва {F} {P}}}
где:
Если это число пар полюсов на фазу (редко, плоскости коммутации ) вместо того, чтобы просто разделить обе формулы на 2. п{\ Displaystyle р}
Примеры
Однофазный , 4-полюсный (2-пар полюсов) синхронный двигатель работает на частоте питания переменного тока 50 Гц. Количество пар полюсов на фазу составляет 2/1 = 2, так что синхронное скорость:
- Nsзнак равно60×502знак равно1500оборотов в минуту{\ Displaystyle N_ {s} = 60 \ раз {\ гидроразрыва {50} {2}} = 1500 \, \, {\ текст {мин}}}
Трехфазное , 12-полюсный (6-пар полюсов) синхронный двигатель работает на частоте питания переменного тока 60 Гц. Количество пар полюсов на фазу составляет 6/3 = 2, так что синхронное скорость:
- Nsзнак равно60×602знак равно1800оборотов в минуту{\ Displaystyle N_ {s} = 60 \ раз {\ гидроразрыва {60} {2}} = 1800 \, \, {\ текст {мин}}}
строительство
 Ротор большого водяного насоса. Кольца скольжения можно увидеть ниже барабана ротора.
Ротор большого водяного насоса. Кольца скольжения можно увидеть ниже барабана ротора.  Обмотка статора большого водяного насоса
Обмотка статора большого водяного насосаОсновные компоненты синхронного двигателя являются статор и ротор. Статор синхронного двигателя и статора асинхронного двигателя аналогичны по конструкции. При синхронной ране ротор машина двойного питания как исключение, рама статора содержит обертку пластину . Кольцевые ребра и keybars прикреплены к пластине обертки. Для того, чтобы выдержать вес машины, рамы крепления и фундаменты требуются. Когда поле обмотка возбуждается возбуждения постоянного тока , щетки и контактные кольца необходимы для подключения к источнику возбуждения. Поле обмотки также может быть возбуждено бесщеточным возбудителем. Цилиндрические, круглые роторы, (также известные как не выделяющиеся полюса ротор) используются до шести полюсов. В некоторых машинах или когда большое число полюсов необходимо, используется выступ полюсов ротора. Конструкция синхронного двигателя аналогична синхронного генератора.
операция
 Вращающееся магнитное поле формируется из суммы векторов поля магнитных трех фаз обмотки статора.
Вращающееся магнитное поле формируется из суммы векторов поля магнитных трех фаз обмотки статора.Работа синхронного двигателя происходит из-за взаимодействия магнитных полей статора и ротора. Его обмотка статора, который состоит из 3 фаз обмотки, обеспечивается питания 3 фазы, а ротор снабжен питания постоянного тока. 3 фазы обмотки статора, несущих 3 фазных токов производит 3 фазы вращающегося магнитного потока (и, следовательно, вращающееся магнитное поле). Ротор замки во с вращающимся магнитным полем и вращается вместе с ним. После того, как ротор замки в с вращающимся магнитным полем, двигатель называется в синхронизации. Однофазный (или двухфазный, полученные из одной фазы) обмотка статора можно, но в этом случае направление вращения не определен и машина может начаться в любом направлении, если не предотвращена от этого с помощью стартовых механизмов.
После того как двигатель находится в эксплуатации, скорость двигателя зависит только от частоты питания. Когда нагрузка двигателя увеличиваются за пределами нагрузки пробоя, двигатель выпадает из синхронизации и поле обмотки больше не следует вращающемуся магнитному полю. Поскольку двигатель не может производить (синхронно) крутящий момент, если она выпадает из синхронизации, практические синхронные электродвигатели имеют частичные или полные короткозамкнутые заслонки (успокоительный) обмотки для стабилизации работы и облегчения запуска. Поскольку эта обмотка меньше, чем у эквивалентного асинхронного двигателя и может перегреться на длительной эксплуатации, а также из-за больших скольжения частоты напряжения индуцируется в обмотке возбуждения ротора, синхронные устройства защиты двигателя воспримет это состояние и прерывает питание (из шага защита).
Начиная методы
Выше определенного размера, синхронные двигатели не самозапуска двигателей. Это свойство обусловлено инерции ротора; он не может сразу следовать за вращением магнитного поля статора. Так как синхронный двигатель не производит присущие средние крутящий момент на остановке, он не может разгоняться до синхронной скорости без какого-либо дополнительного механизма.
Большие двигатели, работающие на промышленной частоте мощности включают в себя индукцию короткозамкнутых обмоток, которая обеспечивает достаточный крутящий момент для ускорения и который также служит для демпфирования колебаний в скорости вращении двигателя в эксплуатации. После того, как ротор приближается к синхронной скорости, поле обмотки возбуждается, и двигатель тянет в синхронизацию. Очень большие двигательные системы могут включать в себя «конский» двигатель, который ускоряет разгруженную синхронную машину перед нанесением нагрузки. Двигатели, которые с электронным управлением могут быть ускорены от нулевой скорости путем изменения частоты тока статора.
Очень маленькие синхронные двигатели обычно используются в линии с питанием от электрических механических часов или таймеров , которые используют частоту линии питания для запуска механизма переключения передач на нужной скорости. Такие небольшие синхронные электродвигатели могут начать без посторонней помощи , если момент инерции ротора и его механической нагрузки достаточно мал [потому что двигатель] будет ускоряться от скорости скольжения до синхронной скорости во время ускорения половины цикла реактивного момента. » Однофазные синхронные двигатели , такие как в электрических настенных часов может свободно вращаться в любом направлении , в отличие от типа затененных-полюсного См. расщеплёнными полюсный синхронный двигатель для того, как последовательное направление отправной получается.
Операционная экономика является важным параметром для решения различных методов запуска двигателя. Соответственно, возбуждение ротора является возможным способом решить проблему пуска двигателя. В добавок, современные предлагаемые способы пуска для больших синхронных машин включает в себя повторяющиеся полярности инверсии полюсов ротора во время запуска.
Области применения, особые свойства и преимущества
Использование в качестве синхронного компенсатора
 V-кривая синхронной машины
V-кривая синхронной машиныИзменяя возбуждение синхронного двигателя, это может быть сделано , чтобы работать на отстающих, ведущий и коэффициент мощности. Возбуждение , при котором коэффициент мощности равен единице, называется нормальное напряжение возбуждения . Величина тока , при этом возбуждения минимальна. Напряжение возбуждения более чем нормальное возбуждение вызывается через напряжение возбуждения, напряжение возбуждения меньше , чем нормальное возбуждение вызывается при возбуждении. Когда двигатель более возбужденный, эдс будет больше , чем двигатель напряжения на клеммах. Это вызывает эффект размагничивания из — за реакции якоря.
V кривой синхронной машины показывает ток якоря в зависимости от тока возбуждения. С увеличением тока тока якоря поля сначала уменьшается, а затем достигает минимума, а затем возрастает. Точка минимума также является точкой, в которой коэффициент мощности равен единице.
Эта способность выборочно контролировать коэффициент мощности может быть использована для коррекции коэффициента мощности энергосистемы , к которому подключен электродвигатель. Поскольку большинство энергосистем каких — либо значительных размеров имеют чистый отстающий коэффициент мощности, наличие перевозбужденных синхронных двигателей двигается чистый коэффициент мощности системы ближе к единице, повышение эффективности. Такая коррекция коэффициента мощности, как правило , является побочным эффектом двигателей , уже присутствующих в системе , чтобы обеспечить механическую работу, хотя двигатели могут работать без механической нагрузки просто обеспечить коррекцию коэффициента мощности. В крупных промышленных предприятиях , такие как фабрики взаимодействие между синхронными двигателями и другими, отстающими, нагрузками может быть явным фактором при проектировании электрической станции.
Устойчивое состояние предел устойчивости
- Tзнак равноTМаксимумгрех(δ){\ Displaystyle \ mathbf {T} = \ mathbf {T} _ {\ {Текст макс}} \ Sin (\ дельта)}
где,
- T{\ Displaystyle \ mathbf {T}} это крутящий момент
- δ{\ Displaystyle \ дельта} угол крутящего момента
- TМаксимум{\ Displaystyle \ mathbf {T} _ {\ текст {макс}}} это максимальный крутящий момент
Вот,
- TМаксимумзнак равно3ВЕИксsωs{\ Displaystyle \ mathbf {T} _ {\ текст {макс}} = {\ гидроразрыва {{\ mathbf {3}} {\ mathbf {V}} {\ mathbf {E}}} {{\ mathbf {X_ { s}}} {\ Omega _ {s}}}}}
При приложении нагрузки, угол крутящего момента увеличивается. При = 90 ° крутящий момент будет максимальным. Если нагрузка приложена дальше , то двигатель потеряет свою синхронизм, поскольку крутящий момент двигателя будет меньше , чем крутящий момент нагрузки. Максимальный крутящий момент нагрузки , которые могут быть применены к двигателю без потери его синхронности называется устойчивой предельным состояние устойчивости синхронного двигателя. δ{\ Displaystyle \ дельта}δ{\ Displaystyle \ дельта}
Другой
Синхронные двигатели особенно полезны в применениях, требующих точной скорости и / или управления положением.
- Скорость не зависит от нагрузки в течение рабочего диапазона двигателя.
- Скорость и позиция могут быть точно контролироваться с использованием открытого контроля цикла; например, шаговые двигатели .
- Приложения малой мощности включают в себя позиционирование машины, где требуется высокая точность и робота приводов.
- Они будут держать свои позиции, когда постоянный ток применяется как статора и обмотки ротора.
- Часы движимых синхронным двигателем, в принципе , как точный , как частота линии источника питания. (Хотя малые частоты дрейфует будут происходить в течение любого заданного нескольких часов, операторы сетки активно регулировать частоту линии в более поздние сроки , чтобы компенсировать, тем самым сохраняя часы механическим приводом точной; см частоты Полезность # стабильности .)
- Запись игрока вертушки
- Повышение эффективности применения низкоскоростных (например, шаровые мельницы ).
Подтипы
Смотрите также
Рекомендации
внешняя ссылка
Синхронный электродвигатель принцип работы — Всё о электрике
Устройство синхронного двигателя

Все электродвигатели построены на одном и том же принципе взаимодействия магнитных полей. Катушка с сердечником из ферромагнитного материала оказывает заметное механическое воздействие на другую аналогичную катушку. Разноименные полюсы соленоидов притягиваются, а одноименные — отталкиваются.
Поэтому в двигателе должно быть пространственное перемещение полюсов магнитного поля, создаваемое одной его частью. А другая часть движка создает свои полюсы и откликается вращением на пространственное перемещение полюсов. Она может содержать как постоянные магниты, так и катушки с сердечником. Далее расскажем о том, как магнитные поля функционируют в синхронных двигателях, а также предоставим другую информацию об этих машинах.
Конструктивные особенности
Синхронный двигатель содержит
- часть конструкции, в которой создается перемещающееся магнитное поле, называемую статором;
- часть двигателя, которая вращается от воздействия магнитного поля, называемую ротором;
- провод, соединяющий движок с источником питания, который сравнивают с якорной цепью корабля. Чтобы указать на ту часть двигателя, которая присоединена к проводу, ее называют якорем. В рассматриваемой машине питающий провод присоединен к статору. Следовательно, это якорь.

Чем больше витков содержат взаимодействующие катушки, тем меньший ток потребуется для эффективной работы движка. Но сила тока — это не самая сложная проблема. Главное — создать пространственное перемещение магнитного поля, что весьма непросто.
По этой причине синхронный двигатель появился только после того, как заработал первый генератор. Его создал в 1891 г. М.О. Доливо-Добровольский. Обратимость электрических машин позволяет использовать их и генераторами, и двигателями. Обратима и синхронная машина. Но для движков существуют определенные конструктивные ограничения, которых нет у генераторов.
Принцип работы
Для получения направления вращения статор двигателя должен содержать как минимум две катушки. Только в такой конструкции можно создать направленное перемещение магнитного поля. Это определяет устройство и принцип работы многих электродвигателей, питаемых от сети. Для нормальной работы синхронной машины, если это генератор, статор может содержать только одну катушку и быть источником ЭДС. Его ротор вращается принудительно. При этом, независимо от направления вращения, на клеммах статора появится переменное напряжение.
Но если такой генератор используется как двигатель, направление вращения его ротора может быть в обе стороны.
Оно будет определяться
- либо положением ротора в момент подачи напряжения на клеммы статора;
- либо принудительно направлением стартового вращения.
Конструкцию большинства электрических машин в основном определяет система электроснабжения, с которой они связаны. В наши дни первичными источниками ЭДС являются трехфазные генераторы. Эти машины создают трехфазное напряжение. Оно позволяет непосредственно получать перемещающееся магнитное поле. Без него синхронные двигатели переменного тока не могут работать, так же, как и асинхронные движки.
Для этого используются три или две фазы, питающие обмотки статора движка. Устройство синхронного двигателя должно соответствовать схеме электропитания. Наилучший результат получается при трехфазной конструкции статора. В этом случае магнитное поле получается вращающимся. По этой причине трехфазный синхронный двигатель является наиболее эффективным, если его сравнивать с аналогами, но при меньшем числе фаз.
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула

В результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.







Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.

Такое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть. Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.

Развитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Принцип действия синхронного двигателя
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
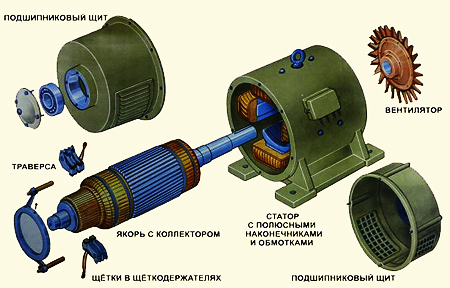
Устройство синхронного двигателя
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.

В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.

Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.

Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.

При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.

Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.

Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.

В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Что такое синхронный двигатель и где он используется
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.

Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).

Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.

Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.

Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.

Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.

Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.

Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.

При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
{SOURCE}
«Какой принцип действия асинхронного двигателя?» – Яндекс.Кью
Конечно, существует много занимательных книжек, в той или иной мере популярно рассказывающих о принципах теории относительности. Наверное, ничего лучше книги Мартина Гарднера «Теория относительности для миллионов» я придумать не смогу (может, еще «Кратчайшая история времени» Хокинга).
Вообще вопрос подразумевает, что человек начнет объяснять про то, что три волоса на голове — это мало, а три волоса в супе — это много. Если же пытаться чуть более серьезно в двух словах рассказать о теории относительности, то, наверное, придется начать с того, какого рода вопросы привели к её возникновению. Одним из главных вопросов здесь является такой: «Как измерить скорость?».
Предположим, речь идет о скорости лодки. Тогда поступают следующим образом: выбирают какое-нибудь фиксированное расстояние, скажем, расстояние между двумя столбами, и измеряют время, за которое лодка проплывет от одного столба до другого. Осталось только разобраться, как померить это самое время. Тут обычно делают так: встают на носу лодки, берут секундомер и начинают засекать время, когда поравняются с первым столбом. И когда увидят, что проплывают мимо столба-окончания, секундомер останавливают. Теперь попробуем проделать это же измерение, но находясь не в лодке, а в бочке, где ничего не видно. Тогда нам надо как-то понять, что мы проплываем мимо столба. Например, можно поставить у столбов по помощнику, которые бы бросались в воду, как только наша бочка с ними поравняется, доплывали бы до нас и говорили, что пора начинать (или заканчивать) отсчет. Тогда мы бы начали отсчет времени, когда приплывет первый помощник, закончили, когда доплыл бы второй, и таким образом узнали бы, сколько времени прошло. Правда, при этом мы бы узнали, не сколько времени мы плыли между двумя столбами, а сколько времени мы плыли между двумя сигналами о том, что мы проплываем мимо столба. Так что по-хорошему нам бы ещё надо было как-то учесть, сколько времени плыли оба помощника. А ведь при неудачном стечении обстоятельств могло оказаться так, что второй приплыл бы раньше первого (например, если русло реки ниже по течению становится уже, и плыть ему надо гораздо меньше).
Другой пример, чуть ближе к современной реальности. Если мы захотим измерить скорость пули, нам надо будет засечь время выстрела как время начала полета пули и время попадания в мишень как время окончания полета. Тогда, если мы не видим саму пулю, то мы начнем отсчет, когда услышим звук выстрела, а закончим, когда услышим, что пуля попала в цель. При этом, поскольку пуля летит быстрее звука, мы можем сначала услышать, что пуля попала в мишень и только потом, издалека, прилетит звук выстрела. Чтобы таких казусов не возникало, хорошо бы, чтобы скорость сигнала о времени начала и конца отсчета была бы заметно выше скорости, которую мы хотим измерить. Так уж вышло, что самый быстрый способ подачи сигнала, который мы можем себе вообразить, — это именно увидеть. То есть в роли пловцов, подающих сигнал, в ситуации с лодкой выступает свет, отраженный от столбов на берегу. Поэтому если скорость лодки, в которой мы плывем, больше скорости света, то у нас нет никакой возможности её измерить: свет от первого столба никогда нас не догонит. А если скорость лодки и не больше скорости света, но соизмерима с ней, то чтобы её измерить, придется
Пуск синхронных двигателей: особенности и способы пуска
Для обеспечения работы мощных электроприводов применяются синхронные электродвигатели. Они нашли применение в компрессорных установках, насосах, в системах, прокатных станах, вентиляторах. Применяются в металлургической, цементной, нефтегазовой и других отраслях промышленности, где необходимо использовать оборудование большой мощности. В этой статье мы решили рассказать читателям сайта Сам Электрик, как может выполняться пуск синхронных двигателей.
Преимущества и недостатки
Конструктивно синхронные двигатели сложнее асинхронных, но они имеют ряд преимуществ:
- Работа синхронных электродвигателей в меньшей степени зависит от колебания напряжения питающей сети.
- По сравнению с асинхронными, они имеют больший КПД и лучшие механические характеристики при меньших габаритах.
- Скорость вращения не зависит от нагрузки. То есть колебания нагрузки в рабочем диапазоне не влияют на обороты.
- Могут работать со значительными перегрузками на валу. Если возникают кратковременные пиковые перегрузки, повышением тока в обмотке возбуждения компенсируют эти перегрузки.
- При оптимально подобранном режиме тока возбуждения, электродвигатели не потребляют и не отдают в сеть реактивную энергию, т.е. cosϕ равен единице. Двигатели, работая с перевозбуждением, способны вырабатывать реактивную энергию. Что позволяет их использовать не только в качестве двигателей, но и компенсаторов. Если необходима выработка реактивной энергии, на обмотку возбуждения подается повышенное напряжение.
При всех положительных качествах синхронных электродвигателей у них имеется существенный недостаток – сложность пуска в работу. Они не имеют пускового момента. Для запуска требуется специальное оборудование. Это долгое время ограничивало использование таких двигателей.
Способы пуска
Пуск синхронных электродвигателей можно осуществить тремя способами – с помощью дополнительного двигателя, асинхронный и частотный запуск. При выборе способа учитывается конструкция ротора.

Он выполняется с постоянными магнитами, с электромагнитным возбуждением или комбинированным. Наряду с обмоткой возбуждения на роторе смонтирована короткозамкнутая обмотка – беличья клетка. Её также называют демпфирующей обмоткой.
")
Запуск с помощью разгонного двигателя
Этот метод пуска редко применяется на практике, потому что его сложно реализовать технически. Требуется дополнительный электродвигатель, который механически соединен с ротором синхронного двигателя.
С помощью разгонного двигателя раскручивается ротор до значений близких к скорости вращения поля статора (к синхронной скорости). После чего на обмотку возбуждения ротора подают постоянное напряжение.
Контроль осуществляется по лампочкам, которые включены параллельно рубильнику, подающему напряжение на обмотки статора. Рубильник должен быть отключен.
В первоначальный момент лампы мигают, но при достижении номинальных оборотов они перестают гореть. В этот момент подают напряжение на обмотки статора. После чего синхронный электродвигатель может работать самостоятельно.
Затем дополнительный мотор отключается от сети, а в некоторых случаях его отсоединяют механически. В этом состоят особенности пуска с разгонным электродвигателем.
Асинхронный запуск
Метод асинхронного пуска на сегодня самый распространенный. Такой запуск стал возможен после изменения конструкции ротора. Его преимущество в том, что не нужен дополнительный разгонный двигатель, так как дополнительно к обмотке возбуждения в ротор вмонтировали короткозамкнутые стержни беличьей клетки, что дало возможность запускать его в асинхронном режиме. При таком условии этот способ пуска и получили широкое распространение.
Сразу же рекомендуем просмотреть видео по теме:
При подаче напряжения на обмотку статора происходит разгон двигателя в асинхронном режиме. После достижения оборотов близких к номинальным, включается обмотка возбуждения.
Электрическая машина входит в режим синхронизма. Но не все так просто. Во время пуска в обмотке возбуждения возникает напряжение, которое возрастает с ростом оборотов. Оно создает магнитный поток, который воздействует на токи статора.
При этом возникает тормозящий момент, который может приостановить разгон ротора. Для уменьшения вредного воздействия обмотки возбуждения подключают к разрядному или компенсационному резистору. На практике эти резисторы представляют собой большие тяжелые ящики, где в качестве резистивного элемента используются стальные спирали. Если этого не сделать, то из-за возрастающего напряжения может произойти пробой изоляции. Что повлечет выход оборудования из строя.
После достижения подсинхронной частоты вращения, от обмотки возбуждения отключаются резисторы, и на нее подается постоянное напряжение от генератора (в системе генератор-двигатель) или от тиристорного возбудителя (такие устройства называются ВТЕ, ТВУ и так далее, в зависимости от серии). В результате чего двигатель переходит в синхронный режим.
Недостатками этого метода являются большие пусковые токи, что вызывает значительную просадку напряжения питающей сети. Это может повлечь за собой остановку других синхронных машин, работающих на этой линии, в результате срабатывания защит по низкому напряжению. Для уменьшения этого воздействия цепи обмоток статора подключают к компенсационным устройствам, которые ограничивают пусковые токи.
Это могут быть:
- Добавочные резисторы или реакторы, которые ограничивают пусковые токи. После разгона они шунтируются, и на обмотки статора подается сетевое напряжение.
- Применение автотрансформаторов. С их помощью происходит понижение входного напряжения. При достижении скорости вращения 95-97% от рабочей, происходит переключение. Автотрансформаторы отключаются, а на обмотки подается напряжение сети переменного тока. В результате электродвигатель входит в режим синхронизации. Этот метод технически более сложный и дорогостоящий. А автотрансформаторы часто выходят из строя. Поэтому на практике этот метод редко применяют.
Частотный пуск
Частотный пуск синхронных двигателей применяется для запуска устройств большой мощности (от 1 до 10 МВт) с рабочим напряжением 6, 10 Кв, как в режиме легкого запуска (с вентиляторным характером нагрузки), так и с тяжелым пуском (приводов шаровых мельниц). Для этих целей выпускаются устройства мягкого частотного пуска.
Принцип работы аналогичен высоковольтным и низковольтным устройствам, работающим по схеме преобразователя частоты. Они обеспечивают пусковой момент до 100% от номинала, а также обеспечивают запуск нескольких двигателей от одного устройства. Пример схемы с устройством плавного пуска вы видите ниже, оно включается на время запуска двигателя, а затем выводится из схемы, после чего двигатель включается в сеть напрямую.

Системы возбуждения
До недавнего времени, для возбуждения применялся генератор независимого возбуждения. Он располагался на одном валу с синхронным электродвигателем. Такая схема еще применяется на некоторых предприятиях, но она устарела и теперь не применяется. Сейчас для регулировки возбуждения используются тиристорные возбудители ВТЕ.
Они обеспечивают:
- оптимальный режим пуска синхронного двигателя;
- поддержание заданного тока возбуждения в заданных пределах;
- автоматическое регулирование напряжения возбуждения в зависимости от нагрузки;
- ограничение максимального и минимального тока возбуждения;
- мгновенное увеличение тока возбуждения при понижении питающего напряжения;
- гашение поля ротора при отключении от питающей сети;
- контроль состояния изоляции, с оповещением о неисправности;
- обеспечивают проверку состояния обмотки возбуждения при неработающем электродвигателе;
- работают с высоковольтным преобразователем частоты, обеспечивая асинхронный и синхронный запуск.
Эти устройства отличаются высокой надежностью. Основным недостатком является высокая цена.
В заключение отметим, что самый распространенный способ пуска синхронных двигателей — это асинхронный запуск. Практически не нашел применения пуск с помощью дополнительного электродвигателя. В то же время частотный запуск, который позволяет в автоматическом режиме решить проблемы пуска, довольно дорогостоящий.
Материалы по теме: