


Какой электродвигатель лучше выбрать?
При выборе бесщеточного электродвигателя для своих разработок инженеры имеют несколько вариантов. Неправильный выбор может привести к провалу проекта не только на этапе разработки – испытания, но и после выхода на рынок, что крайне не желательно. Для облегчения работы инженеров мы сделаем краткое описание преимуществ и недостатков четырех наиболее популярных видов бесщеточных электрических машин: асинхронный электродвигатель (АД), двигатель с постоянными магнитами (ПМ), синхронные реактивные электродвигатели (СРД), вентильные реактивные электродвигатели (ВРД).
Содержание:
Асинхронные электродвигатели
Асинхронные электрические машины смело можно назвать костяком современной промышленности. Благодаря своей простоте, относительно низкой стоимости, минимальным затратам на обслуживание, а также возможности работать напрямую от промышленных сетей переменного тока, они прочно въелись в современные производственные процессы.

Сегодня существует множество различных преобразователей частоты с самыми различными алгоритмами управления, которые позволяют регулировать скорость и момент асинхронной машины в большом диапазоне с хорошей точностью. Все эти свойства позволили асинхронной машине значительно потеснить с рынка традиционные коллекторные двигатели. Вот почему регулируемые асинхронные электродвигатели (АД) легко встретить в самых различных устройствах и механизмах, таких как тяговый асинхронный электропривод, электроприводы стиральных машин, вентиляторов, компрессоров, воздуходувок, кранов, лифтов и многом другом электрооборудовании.
АД создает вращающий момент за счет взаимодействия тока статора с индуцированным током ротора. Но токи ротора нагревают его, что приводит к нагреванию подшипников и снижению их срока службы. Замена традиционной алюминиевой обмотки на медную не устраняет проблему, а приводит к удорожанию электрической машины и может накладывать ограничения на прямой ее пуск.
Статор асинхронной машины имеет довольно большую постоянную времени, что негативно сказывается на реагировании системы управления при изменении скорости или нагрузки. К сожалению, потери связанные с намагничиванием не зависят от нагрузки машины, что снижает КПД АД при работе с малыми нагрузками. Автоматическое уменьшение потока статора возможно использовать для решения данной проблемы — для этого необходим быстрый отклик системы управления на изменения нагрузки, но как показывает практика, такая коррекция не существенно увеличивает КПД.
На скоростях превышающих номинальную поле статора ослабевает из-за ограниченного напряжения питания. Вращающий момент начинает падать, так как для его поддержания будет требоваться больший ток ротора. Следовательно, управляемые АД ограничиваются диапазоном скорости для поддержания постоянной мощности примерно 2:1.
Механизмы, которые требуют более широкого диапазона регулирования, такие как: станки с ЧПУ, тяговый электропривод, могут снабжаться асинхронными электродвигателями специального исполнения, где для увеличения диапазона регулирования могут уменьшать количество витков обмотки, снижая при этом значения крутящего момента на низких скоростях. Также возможен вариант с использованием более высоких токов статора, что требует установки более дорогих и менее эффективных инверторов.
Немаловажным фактором при работе АД является качество питающего напряжения, ведь максимальный КПД электродвигатель имеет при синусоидальной форме питающего напряжения. В реальности преобразователь частоты обеспечивает импульсное напряжение и ток, похожий на синусоидальный. Проектировщикам стоит иметь ввиду, что КПД системы ПЧ-АД будет меньше, чем сумма КПД преобразователя и двигателя в отдельности. Улучшения качества выходного тока и напряжения повышают увеличением несущей частоты преобразователя, это приводит к снижению потерь в двигателе, но при этом возрастают потери в самом инверторе. Одним из популярных решений, особенно для промышленных мощных электроприводов, является установка фильтров между преобразователем частоты и асинхронной машиной. Однако это приводит к увеличению стоимости, габаритов установки, а также к дополнительным потерям мощности.
Еще одним недостатком асинхронных машин переменного тока является то, что их обмотки распределены на протяжении многих пазов в сердечнике статора. Это приводит к появлению длинных концевых поворотов, которые увеличивают габариты и потери энергии в машине. Эти вопросы исключены в стандартах IE4 или классах IE4. В настоящее время европейский стандарт (IEC60034) специально исключает любые двигатели, требующие электронного управления.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами (английский PMMS) создают крутящий момент благодаря взаимодействию токов статора с постоянными магнитами внутри или снаружи ротора. Электродвигатели с поверхностным расположением магнитов являются маломощными и используются в IT оборудовании, офисной технике, автомобильном транспорте. Электродвигатели со встроенными магнитами (IPM) распространены в мощных машинах, используемых в промышленности.
Двигатели с постоянными магнитами (ПМ) могут использовать концентрированные (с коротким шагом) обмотки, если пульсации вращающего момента не являются критичными, но распределенные обмотки являются нормой в ПМ.
Поскольку PMMS не имеют механических коммутаторов, то преобразователи играют важную роль в процессе контроля тока обмотки.
В отличии от других видов бесщеточных электродвигателей, PMMS не требуют тока возбуждения, необходимого для поддерживания магнитного потока ротора. Следовательно, они способны обеспечить максимальный крутящий момент на единицу объема и могут быть лучшим выбором, если требования к массо-габаритным показателям выходят на первый план.

К наибольшим недостаткам таких машин можно отнести их очень высокую стоимость. Высокопроизводительные электрические машины с постоянными магнитами используют такие материалы как неодим и диспрозий. Данные материалы относятся к редкоземельным и добываются в геополитически нестабильных странах, что приводит к высоким и нестабильным ценам.
Также постоянные магниты добавляют производительности при работе на низких скоростях, но являются «Ахиллесовой пятой» при работе на высоких. Например, при увеличении скорости машины с постоянными магнитами возрастет и ее ЭДС, постепенно приближаясь к напряжению питания инвертора, при этом снизить поток машины не представляется возможным. Как правило, номинальная скорость является максимальной для ПМ с поверхностно-магнитной конструкцией при номинальном напряжении питания.
На скоростях больше номинальной, для электродвигателей с постоянными магнитами типа IPM, используют подавление активного поля, что достигается путем манипуляций с током статора при помощи преобразователя. Диапазон скорости, в котором двигатель может надежно работать, ограничен примерно 4:1.
Необходимость ослабления поля в зависимости от скорости приводит к потерям независящим от вращающего момента. Это снижает КПД на высоких скоростях, и особенно при малых нагрузках. Этот эффект наиболее актуален при использовании ПМ в качестве тягового автомобильного электропривода, где высокая скорость на автостраде неизбежно влечет за собой необходимость ослабления магнитного поля. Часто разработчики выступают за применение двигателей с постоянными магнитами в качестве тяговых электроприводов электромобилей, однако их эффективность при работе в данной системе довольно сомнительна, особенно после вычислений связанных с реальными циклами вождения. Некоторые производители электромобилей сделали переход от ПМ к асинхронным электродвигателям в качестве тяговых.
Также к существенным недостаткам электродвигателей с постоянными магнитами можно отнести их трудно управляемость в условиях неисправности из-за присущей им противо-ЭДС. Ток будет протекать в обмотках, даже при выключенном преобразователе, пока вращается машина. Это может приводить к перегреву и другим неприятным последствиям. Потеря контроля над ослабленным магнитным полем, например при аварийном отключении источника питания, может привести к неподконтрольной генерации электрической энергии и, как следствие, к опасному возрастанию напряжения.
Рабочие температуры – это еще одна не самая сильная сторона ПМ, кроме машин, изготовленных из самарий-кобальта. Также большие броски тока инвертора могут привести к размагничиванию.
Максимальная скорость PMMS ограничивается механической прочностью крепления магнитов. В случае повреждения ПМ его ремонт, как правило, осуществляется на заводе изготовителе, так как извлечение и безопасная обработка ротора практически невозможна в обычных условиях. И, наконец, утилизация. Да это тоже доставляет немного хлопот после окончания срока службы машины, но наличие редкоземельных материалов в этой машине должно упростить этот процесс в ближайшем будущем.
Несмотря на перечисленные выше недостатки, электродвигатели с постоянными магнитами являются непревзойденными с точки зрения низкоскоростных мелкогабаритных механизмов и устройств.
Реактивные синхронные двигатели
Синхронные реактивные электродвигатели всегда работают только в паре с преобразователем частоты и используют тот же тип управления потоком статора, что и обычный АД. Роторы данных машин изготавливают из тонколистной электротехнической стали с пробитыми пазами таким образом, что бы они намагничивались с одной стороны меньше, чем с другой. Стремление магнитного поля ротора «соединится» с вращающимся магнитным потоком статора и создает вращающий момент.
Основным плюсом реактивных синхронных электродвигателей являются незначительные потери в роторе. Таким образом, хорошо спроектированная и работающая с правильно подобранным алгоритмом управления синхронная реактивная машина вполне способна соответствовать европейским стандартам премиум класса IE4 и NEMA, не используя при этом постоянных магнитов. Снижения тепловых потерь в роторе повышает крутящий момент и увеличивает плотность мощности, по сравнению с асинхронными машинами. Эти двигатели имеют низкий уровень шума благодаря низкому уровню пульсаций момента и вибраций.
Основным недостатком является низкий коэффициент мощности по сравнению с асинхронной машиной, что приводит к большей потребляемой мощности из сети. Это увеличивает затраты и ставит перед инженером сложную задачу, стоит ли применять реактивную машину или нет для конкретной системы?
Сложность в изготовлении ротора и его хрупкость делает невозможным применение реактивных электродвигателей для высокоскоростных операций.
Синхронные реактивные машины хорошо подходят для широкого спектра промышленных применений, которые не требуют больших перегрузок или высоких скоростей вращения, а также все чаще применяются для частотно-регулируемых насосов из-за повышенной их эффективности.
Вентильные реактивные электродвигатели
Вентильный реактивный двигатель (с английского SRM) создает вращающий момент за счет притягивания магнитных полей зубцов ротора к магнитному полю статора. Вентильные реактивные двигатели (ВРД) имеют относительно небольшое количество полюсов обмотки статора. Ротор имеет зубчатый профиль, что упрощает его конструкцию и улучшает создаваемое магнитное поле, в отличии от реактивных синхронных машин. В отличии от синхронных реактивных двигателей (СРД), ВРД используют импульсное возбуждение постоянного тока, что требует обязательное наличие специального преобразователя для их работы.
Для поддержания магнитного поля в ВРД необходимы токи возбуждения, что уменьшает плотность мощности по сравнению с электрическими машинами с постоянными магнитами (ПМ). Однако они все же имеют габаритные размеры меньшие, чем обычные АД.

Основным преимуществом вентильных реактивных машин является то, что ослабления магнитного поля происходит естественным образом при снижении тока возбуждения. Это свойство дает им большое преимущество в диапазоне регулирования при скоростях выше номинальной (диапазон устойчивой работы может достигать 10:1). Высокая эффективность присутствует у таких машин при работе на высоких скоростях и с малыми нагрузками. Также ВРД способны обеспечить удивительно постоянную эффективность в довольно широком диапазоне регулирования.
Вентильные реактивные машины обладают также довольно хорошей отказоустойчивостью. Без постоянных магнитов эти машины не генерируют неуправляемый ток и момент при неисправностях, а независимость фаз ВРД позволяет им работать с уменьшенной нагрузкой, но с повышенными пульсациями момента при выходе из строя какой-то из фаз. Это свойство может быть полезно, если проектировщики хотят повышенной надежности разрабатываемой системы.
Простая конструкция ВРД делает его прочным и недорогим в изготовлении. При его сборке не используются дорогие материалы, а ротор из нелегированной стали отлично подходит для суровых климатических условий и высоких скоростей вращения.
ВРД имеет коэффициент мощности меньший, чем ПМ или АД, но его преобразователю не нужно создавать выходное напряжение синусоидальной формы для эффективной работы машины, соответственно такие инверторы имеют меньшие частоты коммутации. Как следствие – меньшие потери в инверторе.
Основными недостатками вентильных реактивных машин являются наличие акустических шумов и вибрации. Но с этими недостатками довольно хорошо борются путем более тщательного проектирования механической части машины, улучшения электронного управления, а также механическое объединение двигатель – рабочий орган.
ВРД хорошо подходят для широкого спектра применения и их все чаще используют для обработки сверхпрочных материалов из-за большой перегрузочной способности и большого диапазона регулирования скоростей. Большая перегрузочная способность делает их все более привлекательными для использования в качестве тяговых электроприводов современных электромобилей. Также ВРД получили широкое распространение и в электробытовой технике.
Синхронные тяговые двигатели с постоянными магнитами
Синхронные двигатели с возбуждением от постоянных магнитов, обладающие преимуществами в отношении массогабаритных показателей и потребления энергии, все чаще находят применение в тяговом приводе, хотя они требуют использования сложных систем управления и пока имеют недостаточную надежность.
За последние несколько лет от ведущих мировых поставщиков подвижного состава поступило много предложений, касающихся использования синхронных тяговых двигателей с возбуждением от постоянных магнитов (СДПМ). Такие двигатели имеют меньшие габариты и массу по сравнению с преобладавшими до сих пор на рынке трехфазными асинхронными двигателями.
СДПМ использовались, в частности, на установившем 3 апреля 2007 г. мировой рекорд скорости электропоезде AGV V150 постройки компании Alstom (рис. 1). Они находят применение на подвижном составе различного назначения (таблица) — от трамвая-поезда Citadis Dualis (рис. 2) до двухэтажного междугородного электропоезда Twindexx (рис. 3) для железных дорог Швейцарии (SBB).
Рис. 1. Высокоскоростной электропоезд AGV V150 во время рекордного пробега Рис. 2. Трамвай-поезд Citadis Dualis (фото: Alstom) Рис. 3. Электропоезд Twindexx (источник: Bombardier)Считается, что железнодорожные компании-операторы консервативны в отношении применения новых технологий. В то же время разработчики и изготовители тягового подвижного состава заинтересованы в скорейшей реализации передовых технических решений. Если использование новых разработок способствует существенному улучшению эксплуатационных показателей, эти разработки достаточно быстро находят применение, что подтверждается опытом внедрения импульсных преобразователей для питания тяговых двигателей постоянного тока последовательного возбуждения, тяговых двигателей постоянного тока независимого возбуждения, синхронных двигателей и трехфазных асинхронных двигателей с короткозамкнутым ротором. С развитием технологий повышалась эффективность тягового привода и совершенствовалось управление им, что позволило улучшить характеристики сцепления и снизить потребление энергии.
СДПМ и электронная аппаратура управления ими представляют собой наиболее современную технологию в области тягового привода. Миллионы СДПМ благодаря своей сравнительно малой массе и хорошей управляемости уже используются в приводах гибридных автомобилей. Более крупные двигатели предоставляют такие же возможности для повышения эффективности тягового привода железнодорожного подвижного состава. Данная технология внедряется на новом подвижном составе различного назначения. Однако при этом выявились несколько существенных проблем, требующих решения.
На автомобилях с двигателями внутреннего сгорания для регулирования скорости обычно используют сложное механическое устройство — коробку передач, благодаря чему двигатель может работать в оптимальном скоростном диапазоне. Тяговые двигатели подвижного состава железных дорог должны эффективно работать во всем диапазоне скорости, обеспечивая передачу крутящего момента на колеса через одноступенчатый редуктор либо непосредственно. Такое простое в плане механического оборудования решение позволяет создать надежные системы привода, не требующие сложного технического обслуживания.
Таким образом, первое требование, предъявляемое при проектировании тяговых двигателей, — их способность обеспечивать крутящий момент или тяговое усилие в широком диапазоне скорости (от 0 до 320 км/ч).
Безусловно, важно, чтобы тяговый двигатель работал надежно. В то же время, с точки зрения машиниста и железнодорожной компании-оператора, в равной степени имеет значение точное и плавное регулирование момента во всем диапазоне скорости при помощи системы управления тяговым приводом. Надлежащее регулирование крутящего момента обеспечивает оптимальное использование сцепления между колесом и рельсом, плавное ускорение, способность поддержания постоянной скорости и возможность применения электрического торможения.
При взаимодействии колес с рельсами крутящий момент тягового двигателя преобразуется в линейную силу тяги или торможения. На рис. 4 представлен график зависимости силы тяги от скорости, а также кривая сопротивления движению поезда. Кривая силы тяги пересекает кривую сопротивления движению в точке так называемой установившейся скорости, т. е. максимальной теоретически возможной скорости. Вблизи этой точки величина изменения силы тяги, за счет которой создается ускорение поезда (на рис. 4 обозначена красной стрелкой), невелика. На рис. 5 показаны характеристики мощности тягового привода и потребной тяговой мощности (мощность равна произведению скорости и силы тяги).
Тяговые двигатели, как правило, рассчитываются на определенный режим работы. Двигатель должен развивать требуемый момент при нулевой скорости и поддерживать его до номинальной во всей зоне 1 кривой силы тяги. Выше этой скорости тяговый двигатель развивает максимальную выходную мощность. В зоне 2 сила тяги обратно пропорциональна скорости. В зоне 3 вследствие ограничений характеристик тягового двигателя сила тяги обратно пропорциональна квадрату скорости.
Рис. 4. Тяговая характеристика и сопротивление движению Рис. 5. Характеристики мощностиПри низкой скорости крутящий момент двигателя теоретически может быть больше, чем передаваемый при взаимодействии колеса и рельса. Однако это привело бы к перегрузке двигателя, поэтому таких режимов следует избегать посредством соответствующих действий машиниста или электронной системы управления.
Ранее для управления тяговыми двигателями постоянного тока применялось регулирование напряжения посредством изменения схемы их соединения с последовательного на параллельное и регулирование тока с помощью пускотормозных резисторов. На современном подвижном составе для управления как коллекторными двигателями постоянного тока, так и синхронными и асинхронными двигателями переменного тока используются электронные системы, обеспечивающие изменение напряжения или как напряжения, так и частоты. Применяемые ныне системы тягового электропривода позволяют достичь качественного управления во всем диапазоне скорости при относительно простых алгоритмах регулирования.
Регулирование СДПМ позволяет достаточно легко достичь требуемых характеристик в зоне постоянного крутящего момента, однако для регулирования в зоне постоянной мощности требуются более сложные алгоритмы.
Двигатели переменного и постоянного тока, как и СДПМ, по существу работают на основе одних и тех же физических законов. Поэтому принципы управления ими до некоторой степени подобны. В электрических машинах всех видов крутящий момент возникает при взаимодействии двух магнитных полей. Для появления крутящего момента между векторами напряженности этих магнитных полей должен быть определенный угол, в идеальном случае равный 90 эл. град. Упомянутые поля могут быть созданы токами, протекающими по обмоткам двигателя, или постоянными магнитами.
В настоящее время в тяговом приводе находят применение главным образом трехфазные асинхронные двигатели. Тем не менее весьма важно понимать природу и поведение магнитных полей статора и ротора электрических машин других типов.
В традиционном двигателе постоянного тока северные и южные полюса поля статора всегда ориентированы в одном и том же направлении, в то время как поле якоря (ротора) сдвинуто на 90 эл. град вследствие использования коллектора. В двигателе последовательно-го возбуждения один и тот же ток проходит как через обмотку статора, так и через обмотку ротора, тогда как в случае использования двигателя независимого возбуждения имеется возможность независимо управлять полями ротора и статора.
В традиционном трехфазном синхронном двигателе магнитное поле ротора создается током, протекающим по его обмотке, а ориентация поля определяется физическим положением обмотки ротора. Поле статора создается током, протекающим по его обмотке, и вращается со скоростью, определяемой частотой инвертора, от которого получает питание обмотка статора. Угол между полями статора и ротора увеличивается в зависимости от крутящего момента, а частоты вращения ротора и поля статора одинаковы. Когда угол становится отрицательным, двигатель переходит в тормозной режим.
В трехфазном асинхронном двигателе магнитное поле статора индуцирует в обмотке ротора ток (рис. 6), который, в свою очередь, генерирует магнитное поле. Последнее, взаимодействуя с полем статора, создает тяговый или тормозной момент. В режиме тяги частота вращения ротора ниже частоты вращения поля статора, заданной преобразователем, а в режиме торможения — выше. Крутящий момент не возникает, если частоты вращения равны. Соотношение частот вращения ротора и поля статора характеризуется величиной, называемой скольжением.
В СДПМ поле ротора создается магнитами, которые либо распределены по поверхности ротора, либо размещены в его пазах (рис. 7). В последнем случае обеспечивается большая механическая прочность и меньшие потери на вихревые токи в роторе. В качестве материала для постоянных магнитов получил распространение сплав неодим-железобор (Nd2Fe14B) благодаря его оптимальным магнитным свойствам. Магнитное поле статора создается с помощью трехфазной многополюсной обмотки, размещенной в пазах шихтованного сердечника.
Рис. 6. Принцип работы асинхронного двигателя с короткозамкнутым ротором Рис. 7. Принцип работы СДПМВо всех электрических машинах вращающееся магнитное поле генерирует ЭДС, противоположную по направлению питающему напряжению — так называемую противо-ЭДС. При нулевой частоте вращения она равна нулю, однако с ее ростом линейно возрастает. Для поддержания постоянной величины крутящего момента в зоне 1 (см. рис. 4 и 5) следует увеличивать напряжение питания.
Крутящий момент электрической машины представляет собой произведение магнитного потока и тока. Силовой полупроводниковый преобразователь регулирует питающее постоянное или однофазное напряжение таким образом, чтобы значения тока в обмотках двигателя находились в допустимых пределах. Наиболее современным решением является использование преобразователей на основе биполярных транзисторов с изолированным затвором (IGBT) с широтно-импульсной модуляцией.
В зоне 1, где сила тяги постоянна, напряжение (а в случае асинхронного двигателя — и частота) должно возрастать пропорционально частоте вращения двигателя, при этом значение произведения магнитного потока и тока, т. е. крутящего момента, поддерживается постоянным. При превышении номинального значения частоты вращения приложенное напряжение не может быть увеличено из-за ограничений параметров силового преобразователя и изоляции двигателя. Однако с точки зрения механических характеристик частота вращения может быть выше.
Переход в зону 2 осуществляется посредством ослабления поля, при этом уменьшается противо-ЭДС или (для СДПМ) осуществляется противодействие ее влиянию. В двигателях постоянного тока это достигается уменьшением величины тока, протекающего через обмотку возбуждения, за счет включения параллельно ей сопротивления ослабления поля, в традиционном синхронном двигателе — путем уменьшения тока в обмотке ротора. В асинхронном двигателе ослабление поля происходит автоматически с увеличением частоты тока обмотки статора, в то время как питающее напряжение остается неизменным. В СДПМ осуществить ослабление поля сложнее, поскольку поле ротора создается постоянными магнитами.
В зоне 3 магнитный поток и ток уменьшаются быстрее, чем в зоне постоянной мощности, чтобы избежать превышения предельных электрических и механических характеристик двигателя. Например, в двигателе постоянного тока независимого возбуждения ток якоря также снижается в зависимости от скорости.
Основная причина расширения применения СДПМ в тяговом приводе — их существенные преимущества по сравнению с трехфазными асинхронными двигателями. В пределах примерно 80% рабочего диапазона КПД СДПМ больше на 1-2%, а удельная мощность — на 30-35%, вследствие чего при равной мощности габариты и масса СДПМ примерно на 25% меньше.
В асинхронном двигателе имеет место нагрев ротора вследствие наличия мощности скольжения. В СДПМ он фактически отсутствует, благодаря чему нет необходимости в охлаждении ротора. Статор СДПМ обычно полностью герметичен и имеет жидкостное охлаждение, что способствует повышению надежности двигателя. Кроме того, при использовании СДПМ возможно осуществлять электрическое торможение при низких значениях скорости, что делает принципиально возможным самоуправляемое торможение при замыкании накоротко обмоток статора. Однако достижение этих преимуществ невозможно без компромисса. Выявлены семь основных факторов, препятствующих распространению СДПМ для целей электрической тяги, хотя уже разработаны методы решения этих проблем.
Ограничения размеров и стоимости четырехквадрантного преобразователя и двигателя не позволяют использовать их во всем диапазоне скорости только путем поддержания величины питающего напряжения, настолько превышающей противо-ЭДС, чтобы величина тока была достаточна для достижения требуемого крутящего момента. Проблема может быть решена с помощью ослабления поля, благодаря чему создаются зоны постоянного момента и постоянной мощности. Поскольку регулирование поля, создаваемого постоянными магнитами, затруднительно, ослабление поля достигается подачей тока в обмотки статора. Таким образом создается поле с вектором напряженности, направленным против вектора напряженности поля, создаваемого постоянными магнитами ротора. При этом возникают потери в меди обмотки статора, что в некоторой степени снижает положительный эффект, получаемый благодаря низким потерям при использовании ротора с постоянными магнитами.
Для управления токами, создающими эффект ослабления поля, необходимо определить положение ротора с точностью до 1-2 эл. град. Для четырехполюсного двигателя требуется механическое разрешение не менее чем 1,5 эл. град. Если использовать датчики, от них требуются весьма высокие точность и надежность, чтобы обеспечить нормальную работу системы управления. Возможно управление и без применения датчиков, однако при этом может быть снижена точность регулирования.
Магнитный поток зависит от температуры, при этом напряженность поля снижается примерно на 1% при увеличении температуры ротора на 10 К. Для СДПМ, которые работают в температурном диапазоне 200 К (от -40 до +160 °С), это имеет существенное значение. Поэтому электронная система управления должна контролировать рабочую температуру и учитывать ее при формировании управляющего сигнала.
Каждый СДПМ требует индивидуального силового полупроводникового регулятора, гарантирующего подачу управляющего импульса на включение силовой цепи строго в требуемый момент времени. Впрочем, в современном тяговом при-воде все чаще используются индивидуальные системы управления каждым двигателем. Таким образом, эта проблема решается.
При значительных токах и высоких температурах может произойти необратимое размагничивание, даже если температура ротора не достигает точки Кюри между 310 и 370 °C. Однако более опасно короткое замыкание в обмотке статора, которое может привести к разрушению двигателя, поскольку создаваемое постоянными магнитами вращающееся поле продолжает индуцировать значительные токи в статоре. Здесь размагничивание может быть полезным, поскольку снижает эти токи.
Еще одна проблема связана с тем, что при работе без нагрузки (когда поезд движется в режиме выбега) вращающийся ротор двигателя с постоянными магнитами продолжает индуцировать токи в сердечнике статора. Возникающие вихревые токи наряду с эффектом гистерезиса вызывают потери в стали, что снижает КПД двигателя.
Редкоземельные металлы, используемые в СДПМ, обладают хорошими магнитными свойствами, но довольно чувствительны к механическому и тепловому воздействию. Конструкция ротора у СДПМ сложнее, чем у асинхронных двигателей. Схема управления СДПМ также сложнее в связи с наличием многократных контуров обратной связи и необходимости преобразования сигнала.
Существует достаточно много областей применения, где преимущества СДПМ безусловно преобладают над их недостатками, и это делает их привлекательными для разработчиков тягового привода. Меньшие размеры и масса имеют особое значение при ограниченности пространства — например, в случае необходимости размещения двигателя на оси колесной пары без редуктора.
Более высокий КПД и меньшие потери в роторе обеспечивают существенные преимущества СДПМ с точки зрения совершенствования эксплуатационных характеристик подвижного состава и сокращения потребления энергии (рис. 8). Это видно, в частности, на примере электропоезда V150 компании Alstom. Асинхронные двигатели устанавливаются на тележках, расположенных под кузовами моторных вагонов, тогда как СДПМ могут быть размещены на тележках под узлами сочленения, что позволяет уменьшить сложность и массу тягового привода.
Рис. 8. Электромеханическая характеристика и КПД СДПМСДПМ могут в перспективе получить намного более широкое применение в тяговом приводе (таблица), подобно тому, как в середине 1980-х годов завоевали популярность трех-фазные асинхронные тяговые двигатели, пришедшие на смену двигателям постоянного тока.
Примеры применения тяговых СДПМ
Оператор, страна | Подвижной состав | Изготовитель |
| NTV (Италия) | 25 высокоскоростных поездов AGV | Alstom |
| SBB (Швейцария) | 59 двухэтажных электропоездов Twindexx | Bombardier |
| SNCF (Франция) | 31 трамвай-поезд Citadis Dualis | Alstom |
| SNCF (Франция) | Электропоезда Regiolis (рамочный контракт) | Alstom |
| SNCF (Франция) | Электропоезда Omneo (рамочный контракт) | Bombardier |
| Прага (Чехия) | Низкопольные трамвайные вагоны типа 15T | Skoda |
| Метрополитен Токио (Япония) | Электропоезда серии 16000 | Kawasaki |
| JR East (Япония) | Пригородные электропоезда серии E331 для Токио | Toshiba |
| Опытные образцы | ||
| Метрополитен Мюнхена (Германия) | Электропоезд типа C19 с тележками Syntegra | Siemens |
| Китай | Прототип локомотива на топливных элементах | CNR Yongji |
| Швеция | Электропоезд Grona Taget | Bombardier |
| Турция | Низкопольный трамвай Citadis X04 | Alstom |
| Япония | Поезд с изменяемой шириной колеи | RTRI |
Железные Дороги Мира — 2011
Высокомоментные бесколлекторные двигатели с постоянными магнитами
Мощные и экономичные синхронные двигатели с постоянными магнитами работают без дополнительных передаточных элементов и обеспечивают очень высокий крутящий момент за счет более совершенной конструкции.
Многообразие конфигураций поставляемых электродвигателей позволяет решать самые разные задачи. Один из специальных типов двигателей, известный как высокомоментный безредукторный электродвигатель с постоянными магнитами (PM), характеризуется высоким отношением диаметра к длине и большим числом магнитных полюсов, что оптимизирует создание крутящего момента. Эти относительно низкоскоростные электродвигатели, обычно работающие с частотой ниже 1000 об/мин, предлагаются на рынке как в корпусном, так и в бескорпусном варианте.
Бесколлекторные (синхронные) безредукторные роторные двигатели (DDR) имеют ряд конструктивных особенностей, обеспечивающих выполнение заданных функций. Прямой (безредукторный) привод означает отсутствие элементов передачи мощности между двигателем и приводимой во вращение нагрузкой, что, в свою очередь, дает преимущества перемещения с высокой динамикой практически без люфта и превосходную жесткость при статических/динамических нагрузках. Все это обеспечивает прецизионное управление движением. Использование в роторе большого числа магнитных полюсов способствует созданию высоких крутящих моментов. Наблюдается тенденция к увеличению размеров двигателей с DDR (диаметр некоторых моделей уже превышает 1 метр), вместе с тем на рынке также предлагаются двигатели c меньшими габаритами. Пиковый крутящий момент на выходе, превышающий 20000 Нм, не является чем-то необычным.
Большой диаметр, большое число полюсов
В компании Bosch Rexroth Corp. отмечают другие преимущества высокомоментных двигателей DDR, такие как лучшее согласование с инерцией нагрузки, лёгкость управления, низкий уровень шума и рациональную конструкцию (см. диаграмму «Прямой привод упрощает конструкцию средств автоматизации»). Карл Рапп, руководитель отделения станкостроения Electric Drives & Controls Div. компании, подтверждает, что увеличение числа полюсных пар и диаметра ротора создаёт более высокий крутящий момент на выходе. Кроме того, оптимизация ориентации магнита, усовершенствование конфигурации пазов статора и технологии наматывания обмотки, а также конструкции воздушного зазора способны свести пульсации крутящего момента к минимуму. «Низкий уровень пульсаций крутящего момента требуется для обеспечения высокого качества операций шлифования/ хонингования, это качество также необходимо и в других областях применения», — говорит Рапп.

Технология, лежащая в основе высокомоментных двигателей прямого привода, позволяет упростить конструкцию станка и повысить точность перемещения. Это показано выше на примере делительно-поворотного стола. При этом исключается люфт в редукторе и приводном ремне.
В компании Danaher Motion также считают, что большой диаметр и повышенное число полюсов являются отличительными признаками высокомоментных электродвигателей прямого привода. «Крутящий момент квадратично зависит от диаметра и прямо пропорционально от длины ротора» — поясняет Том Инглэнд, директор по управлению производством компании. «Повышенное число полюсов, которое обеспечивает более высокое удельное содержание меди в обмотках, создающих крутящий момент, приводит к повышению эффективности магнитного поля», — констатирует Инглэнд.
Высокомоментные двигатели DDR предлагаются на рынке в двух классических вариантах. Вариант «бескорпусного» двигателя состоит из кольцеобразного ротора и набора элементов статора, которые заказчик должен встроить в конструкцию станка. По мнению Инглэнда должны быть также предусмотрены средства обратной связи и охлаждения, а также соединительные кабели, что требует выполнения существенного объема конструкторских и сборочно-монтажных работ. Тонкая кольцеобразная конструкция «бескорпусного» двигателя отличается применением полого входного вала большого размера. «Смонтированный в корпусе» двигатель DDR имеет корпус, подшипники, а также стандартный или полый вал. «Однако если станок уже оснащён подшипниками, смонтированный в корпусе двигатель не будет работать, поскольку непосредственное соединение трех (и более) подшипников на одной оси вызовет их повреждение», — продолжает он.
Недавно компания Danaher Motion реализовала другой подход, разработав третий, усовершенствованный вариант двигателя DDR, в основу которого, как сообщается, заложены преимущества предшествующих вариантов при одновременном исключении их недостатков. Под названием «кассетный DDR» (или CDDR) эти высокомоментные электродвигатели сохранили повышенное число полюсов и большой диметр, но не имеют подшипников. «Ротор устанавливается на подшипниках оборудования заказчика, что обеспечивает упрощенный монтаж при минимальном объеме конструкторской работы, а также возможность демонтажа двигателя без разборки станка,»- комментирует Инглэнд.
По мнению представителя компании Danaher, так сложилось исторически, что недостатком двигателей прямого привода всегда оставалась сложность их применения и стоимость. «Ситуация изменилась с внедрением технологии двигателей CDDR. Эта технология сделала доступными преимущества прямого привода как для простых механизмов, так и для классических, высокопроизводительных приложений сервоприводов», — заключает Инглэнд. Сегодня двигатели по технологии CDDR находят применение в упаковочном оборудовании, механизмах подачи прессов, в механизмах и оборудовании, используемых в перерабатывающей промышленности, в типографском и медицинском оборудовании.
Плотность крутящего момента, мощные магниты
В компании Siemens рассматривают конструкцию с высокой плотностью крутящего момента как неотъемлемую часть выпускаемых компанией высокомоментных двигателей. По словам Ральфа Бэрана, начальника производства серводвигателей и мехатронных устройств в подразделении Siemens Energy & Automation (E&A), плотность крутящего момента во многом зависит от силы постоянных магнитов. Компания Siemens использует магниты из сплава неодима, железа и бора (Nd-Fe-B) (которые считаются самыми мощными и доступными среди магнитов, изготовленных из редкоземельных металлов) в своих вмонтированных в корпус и бескорпусных (встраиваемых) высокомоментных двигателях.
Другим показателем высокой плотности крутящего момента является количество магнитных полюсов, предусмотренных конструктивным исполнением. Увеличение числа полюсов трансформируется в высокий крутящий момент на выходе, однако такая закономерность более действенна при малом числе полюсов. Например, существенное повышение крутящего момент может быть достигнуто при увеличении количества полюсов от четырех до восьми при сохранении постоянного объема двигателя, однако, по словам Бэрана, прирост крутящего момента будет гораздо меньше при изменении количества полюсов, скажем, от 32 до 46. «На основании практического опыта увеличение количества полюсов до 30 является хорошим способом повышения плотности крутящего момента»,- констатирует он. (Тем не менее, на рынке предлагаются бескорпусные высокомоментные двигатели с количеством полюсов, значительно превышающим 100.)
Компания Baumuller Nurnberg GmbH также уделяет большое внимание установлению оптимального соотношения между диаметром и длиной в конструкции своих многополюсных, синхронных, высокомоментных двигателей с постоянным магнитом серии DST. «В результате этого был достигнут устойчиво высокий крутящий момент в широком диапазоне скоростей», — говорит Марцел Мёллер, начальник производства электродвигателей.
В швейцарской компании ETEL S.A. отмечают, что наличие всё более эффективных средств моделирования и анализа упрощает разработку и оптимизацию двигателей. «Оптимизация конструкции двигателя приведет к максимальному повышению плотности потока за счет использования продуманной пластинчатой конструкции зубца и выбора материала пластин при одновременном сохранении возможности монтажа максимального количества материала обмоток, что необходимо для создания крутящего момента, перпендикулярного направлению магнитного потока»,- говорит Кевин Дерабас, президент ETEL S.A. в США. При этом он ссылается на конструкцию, запатентованную компанией ETEL S.A., с целью повышения «коэффициента заполнения» пластинчатых структур медными обмоточными проводами. Тем самым достигается коэффициент заполнения, равный 60% по сравнению с 30% для предыдущих конструкций. Компания ETEL S.A. изготавливает широкий спектр бескорпусных высокомоментных электродвигателей.
Особенности управления
По мнению компании Bosch Rexroth управление высокомоментными двигателями DDR осуществляется практически аналогично управлению другими бесколлекторными двигателями, однако требует определенных, специальных мер. Время срабатывания контуров управления (по току, скорости и положению) должно быть минимальным для достижения высокого уровня статической/динамической жёсткости. Интеллектуальные сервоприводы обеспечивают высокую скорость работы всех внутренних контуров (как правило, через каждые 0,25 мс). «Так как связка «привод + высокомоментный двигатель» обеспечивает подачу крутящего момента на обрабатываемую деталь, от нее непосредственно зависят точность и плавность обработки этой детали», — говорит Рапп. Как отмечалось выше, для точной механической обработки особо важное значение имеет снижение пульсации крутящего момента.
Для получения высокой степени жёсткости необходима более широкая полоса пропускания усилителя привода. «Высокая динамика способна возбудить механические гармоники, которые должны быть отфильтрованы усилителем за счет настроек фильтров, которые не должны вносить ограничения в характеристики», — предупреждает Рапп. Выбор стредств обратной связи также имеет принципиальное значение. Рекомендуется обратная связь с синусоидальным сигналом, поскольку интеллектуальные приводы извлекают из этого сигнала информацию об изменении скорости. «Следует избегать обратной связи последовательного типа, а также обратной связи с прямоугольным сигналом, поскольку это приводит к ограничению характеристик», — говорит Рапп.
Для работы бесколлекторных двигателей, оснащенных постоянными магнитами, требуется электронная коммутация (или переключение полюсов). Для высо-комоментных двигателей с DDR электронная коммутация не является простой процедурой, поскольку системы обратной связи полого вала являются чаще всего инкрементными, а не абсолютными, что требует от усилителя привода выполнения автоматической коррекции коммутации после каждого включения устройства управления. «Эта процедура ещё более усложняется при использовании двигателей с повышенным числом полюсов, так как расстояние между полюсами становится очень малым», — отмечает Рапп. Интеллектуальные приводы, например, привод IndraDrive компании Bosch Rexroth, предусматривают различные функции коммутации. Предпочтение отдается методу насыщения, поскольку его можно применять без механических перемещений в двигателе, объясняет он.
Бэран, представитель Siemens E&A, утверждает: «Физически высокомоментные двигатели имеют те же самые характеристики управления, что и другие бесколлекторные двигатели с постоянным магнитом. Тем не менее, исключение механических элементов из трансмиссии обеспечило избавление от люфта [«мертвого» хода] и от проблемы отсутствия механической жёсткости». Результатом этого явилось впечатляющее повышение механической жесткости трансмиссии.
Применительно к контроллеру это означает, что он может работать с большей скоростью без выхода за установленные пределы, что дает возможность его применения при повышенном уровне ускорения/торможения с более точным позиционированием и управлением траекторией, поясняет Бэран. «Опыт показал, что в отличие от традиционной комбинации «мотор-муфта-редуктор «,для станков, конструкция которых предусматривает использование прямого привода, можно добиться приблизительно десятикратного улучшения их динамики»,- говорит он.
Как сообщается, ввиду отсутствия редукторов и других механических элементов трансмиссии, двигатели DST с прямым приводом производства компании Baumuller имеют нулевой люфт, что обеспечивает высокую эффективность управления. Эта характерная особенность позволяет делать выводы о качестве соответствующего технологического процесса путем контроля крутящего момента и скорости двигателя, объясняет Мёллер. Изменения в эксплуатационных параметрах, например, изменения вязкости смазки, сопоставляются в контроллере с помощью компьютерных программ, в результате чего повышается эффективность управления системой и качество продукции. «Как правило, прямые приводы также повышают КПД всей системы и приводят к экономии энергии», — добавляет Мёллер.
Компания ETEL высказывает мнение о крайней необходимости хорошо демпфированного замкнутого сервоконтура для управления крутящим моментом двигателя, равно как и необходимости привода, способного справляться с энергией рекуперации во время быстрых торможений. Только благодаря конструкции прямого привода стало возможным «видеть» полный резонанс нагрузки и непосредственно отраженную инерцию. В случае аварийного останова электродвигатель быстро превращается в генератор, вырабатывающий большое количество рекуперированной энергии, которая должна при соответствующем управлении рассяться в приводе или поступить снова к источнику энергии, объясняет Дерабас.
Важность охлаждения
Большой крутящий момент вызывает выделение тепла в обмотках электродвигателя, которое должно отводиться во избежание его повреждения. «Охлаждение также сводит к минимуму температурное расширение статора, — констатирует Рапп. — Такое расширение может оказывать влияние на точность технологического процесса (вследствие увеличения размеров деталей), а также способно вызвать напряжённое состояние и повреждение элементов крепления двигателя». Поскольку двигатель встраивается в конструкцию станка, изготовители оборудования должны принимать во внимание различия в температурном расширении разнородных материалов с тем, чтобы предотвратить повреждение статора при его установке на станке. В компании Bosch Rexroth приводят пример одной из конструкций оборудования, которая допускала лишь частичную установку статора в посадочное отверстие станка. При отсутствии охлаждающей жидкости температурное расширение, возникшее на стороне статора за пределами станка, со временем вызвало растрескивание обмоток.
«Метод охлаждения и объем, выбор жидкости, сжатого воздуха или конвекции — всё это зависит в основном от потребляемой мощности или от средней загруженности, а также от анализа температурного расширения»,- добавляет Рапп.

Бескорпусные, высокомоментные двигатели IndraDyn T производства компании Bosch Rexroth состоят из кольцеобразного статора с трехфазными обмотками и ротора с постоянными магнитами. При скорости вращения 60 об/мин двигатель создает постоянный крутящий момент, равный 6300 Нм. На более низкой скорости пиковый крутящий момент равен 13800 Нм.
В компании Siemens также отмечают принципиальную роль охлаждения для повышения плотности крутящего момента. Самые большие тепловые потери происходят в обмотках статора бесколлекторных электродвигателей с PM, так как в роторе из-за отсутствия намагничивающих токов таких потерь нет. Одним из эффективных способов отвода тепла, вырабатываемого этими двигателями, является пропускание охлаждающей воды по трубам на минимальном расстоянии от обмоток статора, поясняет Бэран. «Испытания показали, что крутящий момент на выходе двигателя, спроектированного с расчетом на естественное воздушное охлаждение, может быть увеличен на 30% при условии его оптимизации под водяное охлаждение»,- отмечает он.
По данным компании ETEL реальная выходная мощность высокомоментных двигателей ограничена способностью удаления из обмоток тепла, вызванного их сопротивлением, а также тепловыми потерями на вихревые токи в пластинчатой структуре статора. (Потери на вихревые токи увеличиваются с ростом числа полюсов.) При невозможности отвода всего тепла увеличение температуры в обмотках в итоге приведет к разрушению изоляции, что повлечет за собой поступление тепла в ротор. Это тепло, в свою очередь, вызвать размагничивание высокомощных магнитов ротора, поясняет Дерабас. «Циркуляция воды на минимальном расстоянии от обмоток статора является эффективным средством с точки зрения экономии и теплоизоляции для максимального отвода тепла» — добавляет он. Вот почему на внешнем диаметре статора часто обнаруживаются кольцевые каналы, которые обеспечивают плотное расположение трубок охлаждения.

Вмонтированный в корпус высокомоментный двигатель прямого привода 1FW3 производства компании Siemens обеспечивает постоянный крутящий момент до 7000 Нм при скорости вращения 200 об/мин.

Высокомоментные двигатели серии DST производства компании Baumuller создают постоянный крутящий момент в диапазоне до 6130 Нм, обеспечивают степень защиты IP54 и включают в себя модели с полым валом (не показаны). Пиковый крутящий момент равен 13500 Нм. Варианты выбора обратной связи включают резольвер и синусно-косинусный преобразователь (дополнительная поставка).
Компания Baumuller встраивает водяное охлаждение в свои высокомоментные двигатели DST в качестве необходимой меры для достижения самого высокого крутящего момента. «Только так возможно достичь высокой плотности крутящего момента и одновременно высокой перегрузочной способности, — констатирует Мёллер. — Более того, встроенное водяное охлаждение обеспечивает более высокий класс защиты (IP54), что способствует соответствию двигателей DST жестким условиям промышленного применения». Кроме повышенной охлаждающей способности, другим неочевидным преимуществом водяного охлаждения является пониженный уровень шума. Компания Baumuller (и другие производители) отмечают, что высокомоментные двигатели DDR с водяным охлаждением работают тише, чем их аналоги, охлаждаемые вентиляторами.
Представитель компания Danaher Motion утверждает, что её кассетные двигатели CDDR имеют высокий КПД и способны заменить устройства с водяным охлаждением за счет внедрения герметичных, невентилируемых двигателей при существенном сокращении затрат. Тем не менее, для дальнейшего увеличения выходного крутящего момента этих двигателей в них можно добавить водяное или воздушное охлаждение.
Обзор областей применения
Несмотря на то, что высокомоментные электродвигатели DDR не относятся к изделиям крупносерийного производства, они имеют широкий диапазон применения. Станки, обрабатывающие центры, оборудование для обработки металлов давлением, агрегатные станки с делительно-поворотным столом, печатные линии, а также оборудование для обработки пластмасс — вот основные рынки этих двигателей. По данным компании Bosch Rexroth более экзотические сферы применения этих двигателей включают ветроэнергетику и использование энергии морских волн. Компания ETEL приводит пример использования этих двигателей в новом поколении подъемников, где замена гидравлических элементов позволяет снизить затраты на техническое обслуживание и упростить установку.
В компании Siemens отмечают использование высокомоментного двигателя 1FW3 (установленного в корпусе) и двигателя 1FW6 (встроенного типа) в составе многочисленных станков, а также для других производственных применений. Последние из упомянутых бескорпусных двигателей предназначены для встраивания в механизм пользователя, который обеспечивает установку двигателя на подшипники. Станки, оснащенные двигателями 1FW6, должны иметь энкодеры. Двигатели 1FW3, вмонтированные в корпус, содержат подшипники и энкодер. Они применяются в производстве изделий из пластмасс (в экструдерах, намоточных станках, в машинах для литья под давлением и т.д.), а также в бумажной и текстильной промышленности.
Компания Baumuller делает акцент на широком применении двигателей DST в частности в червячных и финишных приводах прессов для выдавливания пластмасс/машин для литья под давлением, а также в приводах цилиндров с печатной формой и офсетных цилиндров в полиграфической промышленности.
Одним словом, высокомоментные двигатели находят свою нишу там, где раньше применялись зубчатые передачи, цепи или приводные ремни, высказывается представитель компании ETEL.
Изготовители бесколлекторных высо-комоментных электродвигателей с прямым приводом и постоянными магнитами твердо убеждены в том, что производители оборудования могут добиться серьезных преимуществ в повышении производительности и качества при условии оптимизации их станочного оборудования под эти двигатели. Опыт, накопленный в Siemens E&A, показал реалистичность таких преимуществ. «В некоторых случаях производительность станков возросла на 50%, а их точность увеличилась примерно на 30%»- говорит Бэран.

Высокомоментный двигатель кассетного типа (CDDR) производства компании Danaher Motion (показан в разрезе) отличается обратной связью по положению и зажимной муфтой, которая крепится к валу станка пользователя. Двигатель имеет 46 магнитных полюсов и создает на выходе постоянный крутящий момент, равный 500 Нм при объёме 0,23 дм3.
В Siemens E&A называют дополнительные причины, по которым производителям оборудования следует применять эти высокомоментные двигатели. Они включают сокращённый объем технического обслуживания и меньшее количество запасных частей в силу малого количества деталей, использованных в конструкции этих двигателей, экономию энергии за счет более эффективной силовой передачи, а также экономию пространства за счет использования малогабаритных и компактных станков вместо станков, оснащенных комбинацией из мотора и редуктора.
Вконтакте
Google+
Бесколлекторные двигатели с постоянным магнитом
Применение больших двигателей переменного тока с постоянным магнитом (ПМ) при решении серьезных промышленных и оборонных задач становится более заметным. Их количество ограничено скорее рядом рыночных проблем, чем технологией. Большая плотность мощности и эффективность — вот главные преимущества таких двигателей.

Показанный во время испытаний 11,4 МВт высокоскоростной (6225 об/мин) бесколлекторный двигатель с ПМ от Canopy Technologies (DRS и Elliot) относится к семейству двигателей, которое охватывает диапазон мощностей 4-32 МВт. Он предназначен для промышленного применения
Бесколлекторные двигатели с постоянным магнитом (ПМ) лучше известны в отраслях, где требуются сравнительно небольшие габариты и низкая потребляемая мощность. Такие двигатели могут иметь практически любой размер без каких-либо технологических ограничений. Большие бесколлекторные двигатели с ПМ не являются чем-то совершенно новым. Они поставляются отдельными производителями, стремящимися преодолеть экономические трудности, которые еще недавно ограничивали ассортимент таких двигателей.
Большие бесколлекторные двигатели с ПМ имеют ряд преимуществ, среди которых можно назвать большую плотность мощности и высокую эффективность из-за отсутствия потерь в роторе. Выгоды от их использования связаны с ценой, поскольку затраты на производство и стоимость материалов, включая высокоэффективные магниты, быстро растут. Для управления бесколлекторными двигателями с ПМ также необходим частотно-регулируемый привод (VFD). Тем не менее, анализ показателей затрат и результатов показывает, что двигатели с ПМ более предпочтительны по сравнению с альтернативными технологиями (см. ниже) для отраслей промышленности с тяжелым режимом работы, судовых двигателей, в военной/ оборонной области и в других секторах, число которых постоянно растет.
Всесторонний анализ потенциального применения является главным для обоснования затрат и результатов. Этому могут помочь недавние улучшения. Известная эксплуатационная готовность приводов в сочетании с такой существенной тенденцией, как снижение цены на приводы и магнитные материалы наводит на мысль о том, что все больше таких двигателей будет эксплуатироваться в ближайшем будущем. Лучшая осведомленность пользователей о больших двигателях с ПМ будет способствовать такому росту применения.
Приводы и магниты дают импульс к развитию
Компания DRS Technologies Inc., известный разработчик и производитель больших бесколлекторных двигателей с ПМ, начала применять некоторые из своих разработок в области силовых систем в оборонной промышленности, на промышленных предприятиях, на судах и на транспорте. Усовершенствования в области технологии магнитов и частотно-регулируемых приводов, необходимых для запуска и работы двигателей с ПМ, позволили создать двигатели больших размеров. Приводы, использующиеся в DRS, являются приводами высокого напряжения (1,5-6,6 кВ) с широтно-импульсной модуляцией (ШИМ) и векторным или бездатчико-вым векторным управлением.

Эдгар С. Тэкстон, главный инженер и руководитель отдела проектирования систем в компании DRS Power Technologies, отмечает, что в последние десять лет произошло значительное улучшение надежности VFD наряду с увеличением номинальной мощности, которая может достигать 60 МВт и более. Увеличение мощности отчасти связано с появлением современных устройств коммутации мощности, таких как биполярные транзисторы с изолированным затвором (IGBT) и тиристоры с полным управлением по затвору (IGCT). «Двигатели с ПМ в полной мере проявляют себя в тех областях, где необходимы VFD или там, где управление с регулируемой частотой дает преимущества в эксплуатации, которые перевешивают высокую стоимость VFD» — говорит Э. С. Тэкстон.
Если говорить о магнитных материалах, нужно отметить, что их коррозионная стойкость, механические свойства и температурный диапазон значительно улучшились. В результате машины с ПМ могут эксплуатироваться как в отраслях промышленности с тяжелым режимом работы, так и в военной области. «Стоимость постоянных магнитов из редкоземельных металлов за последние десять лет снизилась в пять раз, в то время как соответствующая удельная намагничивающая сила возросла в три раза» — поясняет Тэкстон. Это означает улучшение показателей соотношения затрат и результатов в 15 раз и является существенным для постоянной «доступности по цене».

В DRS Technologies считают, что по своим возможностям конструкция их бесколлекторного двигателя с ПМ с более высоким числом полюсов превосходит альтернативный синхронный двигатель. К его преимуществам относится уменьшение веса и габаритов
Еще одна компания, имеющая длительную историю производства высокоэффективных бесколлекторных двигателей с ПМ (и приводов) — это Powertec Industrial Motors Inc. В настоящее время она достигла уровня 300 кВт для стандартной продукции. Основные области применения связаны с военной и оборонной отраслями, а также с применением в промышленном производстве с взрывоопасными условиями. Одно время компания производила бесколлекторные двигатели постоянного тока мощностью до 450 кВт. В этих машинах с наружным диаметром около 65 см использовались ферритовые постоянные магниты. Они поставлялись с воздушным или жидкостным охлаждением. Такие двигатели относятся к заказной продукции, и в настоящее время серийно не выпускаются. В 2006 г. планируется выпустить новую модель мощностью до 750 кВт.
В Powertec согласны с тем, что между двигателями и приводами существует определенная взаимосвязь. Раньше большие мощные IGBT-приводы, способные работать с бесколлекторными двигателями, были недоступны из-за высоких цен. «За последние пять лет это положение существенно изменилось. Теперь такие приводы стали доступнее по более приемлемым ценам’,’- отмечает Эд Ли, главный исполнительный директор Powertec. Для управления двигателями в компании используются низковольтные приводы (до 600В).
Тем не менее, в Powertec считают, что причины нехватки больших двигателей с ПМ связаны в большей мере с рыночными, а не с технологическими факторами. «Несмотря на то, что большие двигатели с ПМ доступны, они имеют высокую стоимость по сравнению со стандартными двигателями. По этой причине, вне зависимости от того, что эффективность, меньшие габариты (высокая плотность мощности) и более высокие динамические характеристики являются важными при эксплуатации, покупатель не будет тратить лишние деньги», — утверждает Ли. В результате этого производителей таких двигателей все еще не так много.
На сегодняшний день, отмечает Ли, в промышленных двигателях используются два наиболее доступных редкоземельных магнитных материала:
— неодим-железо-бор (Nd-Fe-B) и самарий-кобальт. Они близки по магнитной проницаемости, однако самарий имеет лучшие характеристики при высокой температуре. Несмотря на то, что цена на магниты из Nd-Fe-B за последние пять-семь лет существенно снизилась, этот материал остается более дорогостоящим по сравнению с равноценными материалами, которые используются в роторах асинхронного двигателей переменного тока. «Стоимость магнита и низкий объем производства оказывают влияние на то, что цена бесколлекторных двигателей с ПМ остается высокой. Это, соответственно, оказывает влияние на недостаточный спрос на эти двигатели» — делает вывод Ли.
Высокий крутящий момент
В Automation & Drives Div. Siemens AG считают, что большие двигатели с ПМ в основном применяются для работы с высоким крутящим моментом. Такие двигатели имеют конструкцию с непосредственным приводом (без коробки передач). «Это связано с тем, что, заботясь о сокращении издержек производства, производители все больше внимания уделяют снижению расходов на техническое обслуживание своих фондов», — поясняет Роберт Ленинг, менеджер по большим двигателям переменного тока в Siemens A&D Large Drives Div. «Один из шагов в данном направлении — это использование технологии прямого привода, которая позволяет обходиться без коробки скоростей, — отмечает Ленинг. — По сравнению с двигателями коробки скоростей требуют более тщательного обслуживания и пристального наблюдения, они также имеют более низкий ресурс работы».
Далее он указывает на низкоскоростную модель высокомоментных двигателей от Siemens, замечая: «По нашему мнению, большие двигатели с ПМ с номинальной частотой вращения от 800 до почти 5000 об/мин не имеют реальных преимуществ перед стандартными асинхронными машинами’.’ Технология на основе ПМ также может быть «интересна» для электродвигателей с высоким числом оборотов, например 10000 об/мин и выше. В этом случае их эффективность выше, чем у асинхронных двигателей. По его словам, однако, применение двигателей с данной технологией в этой области обычно очень специфично.
Ленинг упоминает также, что стоимость высокоэффективных магнитов снижается, что делает технологию двигателя с ПМ более привлекательной. Несмотря на это, полная технология прямого привода пока еще дороже по сравнению с асинхронными двигателями. «Следовательно, двигатели с ПМ вряд ли заменят в обозримом будущем традиционные асинхронные двигатели для стандартных приложений»,- говорит он, отмечая также усовершенствование средств проектирования и «ноу-хау» для разработки двигателей с ПМ, на котором основана эта линейка устройств.
В Yaskawa Electric соглашаются с мнением, что не существует технических барьеров для создания больших бесколлекторных двигателей с ПМ в диапазоне до 100 кВт. Проблемы в основном носят экономический характер. Обсуждения с потребителями и ссылки на мощные двигатели встречаются часто, однако это изделие не относится к числу типовых или «серийных» Yaskawa предоставляет экономические характеристики и обеспечивает надежность технологии двигателя с внутренним постоянным магнитом (IPM), использующейся в мощных двигателях на протяжении нескольких лет. Кроме этого, компания использует серводвигатели с IPM в своих станках (последнюю статью о серводвигателях с IPM см.: Control Engineering Россия, 2006 г., № 2, стр. 17-21).

Являясь частью новой линейки продукта HT-direct от Siemens, этот бесколлекторный двигатель с ПМ с водяным охлаждением имеет номинальный диапазон крутящего момента 18000 Нм при напряжении 690 В. Выпуск двигателей HT-direct запланирован на июнь 2006 г. Они также будут поставляться с вариантом воздушного охлаждения
На производителей этих устройств все большее влияние оказывает экономическая необходимость сокращения времени вывода нового изделия на рынок. В компании утверждают, что для того, чтобы помочь потребителям извлечь выгоду из применения цифровых сервосистем в процессах и механизмах с высокой мощностью, Yaskawa распространяет технологию двигателей с IPM на свое производственное оборудование для повышения номинальной мощности.
Итальянская компания Oemer Motori Elettrici Spa — еще один производитель, больших бесколлекторных двигателей с ПМ. Компания, в частности, предлагает безредукторные электродвигатели с большим пусковым моментом с диапазоном мощности до 300 кВт и числом оборотов до 500 об/мин, трехфазные серводвигатели с жидкостным охлаждением мощностью до 318 кВт при 5000 об/мин, и высокопроизводительные блоки, которые достигают мощности на выходе свыше 1 МВт при номинальной скорости до 2600 об/мин для скоростных промышленных приложений. Линейка продукции Oemer была представлена на выставке SPS/IPC/Drives в Германии в ноябре 2005 г.
Большое число преимуществ
По данным DRS Technologies двигатели с ПМ на 1-2% превосходят по КПД асинхронные двигатели и синхронные двигатели при полной нагрузке и на 10-15% — при неполной нагрузке. Эффективность обеспечивается за счет полного возбуждения ротора без тока и отсутствия соответствующих потерь на всех скоростях. В качестве примера Тэкстон приводит низкоскоростной двигатель корабельной силовой установки, достигающий поразительного КПД -99,3%!
При этом упрощается охлаждение двигателя, поскольку тепло, исходящее от ротора, незначительно. Охлаждение необходимо только для статора и, поскольку он является «внешней структурой» более предпочтительным становится водяное охлаждение. Упрощение схемы охлаждения также приводит к гибкой геометрии двигателя. «Машины с ПМ поддерживают намного более широкий диапазон соотношений размеров, чем стандартные двигатели. Возможны короткие, с большим диаметром и длинные, узкие машины, так же как и радиальные (традиционные) и аксиальные (дисковые) модели с воздушным зазором», — говорит он.
Габариты и вес компактных бесколлекторных двигателей с ПМ уменьшаются на 1/2 — 1/3 по сравнению с габаритами традиционных двигателей. Кроме того, их характеризует простота, поскольку обмотка есть только у статора, что увеличивает надежность. В отличие от этого асинхронные двигатели имеют роторную и статорную обмотку, в то время как синхронные двигатели с фазным полем (WFS) конструктивно еще более сложны. Они включают основной статор, основной ротор, ротор-возбудитель, обмотки статора-возбудителя и, в большинстве случаев, вращающийся выпрямитель, поясняет Тэкстон.
В DRS Technologies продемонстрировали опытные образцы двигателей с ПМ, которые достигают более высокой мощности для заданной скорости по сравнению с традиционными машинами, что дает большую гибкость в согласовании нагрузки и избавляет от необходимости использования передаточных механизмов (в конструкции двигателя с прямым приводом). «Двигатели с ПМ имеют ту же стоимость, что и стандартные машины. До тех пор, пока есть необходимость использовать VFD, существует минимальное основание для выбора стандартной машины»,- продолжает Такстон.
В Powertec преимущества больших бесколлекторных двигателей видят в более высоком КПД, высокой плотности мощности (меньшем объеме, приходящемся на выходную мощность) и в более высоких динамических характеристиках. КПД бесколлекторных двигателей с ПМ на 3% превосходит аналогичный показатель асинхронных двигателей переменного тока. Ли указывает на то, что эта разница может быть и меньше, если будут предприняты все меры для минимизации потерь в асинхронных двигателях (как это сделано, например, в особых энергосберегающих конструкциях).
«Однако такие асинхронные двигатели с низким скольжением вряд ли будут удобными для работы прямо от сети без привода из-за очень высокого начального тока и пониженного пускового момента, — добавляет Ли. — С другой стороны, бесколлекторные двигатели с ПМ также не могут работать прямо от сети, поскольку они должны подключаться при определенном положении вала».
В Siemens главные преимущества применения больших бесколлекторных двигателей с ПМ видят в более низких эксплуатационных расходах, более высокой общей работоспособности системы и меньшей рабочей площади. Отсутствие коробки скоростей помогает в различных областях: более низкие расходы на техническое обслуживание и более высокая эффективность электропривода, благодаря меньшим потерям мощности, а также меньшая сложность системы.
Проблемы управления, большее число полюсов
Управление большими двигателями с ПМ не представляет особых сложностей. Приводы с ШИМ сейчас обеспечивают уровень управления, соответствующий решению ответственных задач промышленного производства, а также позволяют снизить мощность гармоник
системы и повысить коэффициент мощности.
По мнению Тэкстона из DRS высокая плотность мощности для большинства бесколлекторных двигателей с ПМ обусловлена большим, чем у стандартных двигателей, числом полюсов. «Двигатели с ПМ могут иметь в три раза больше полюсов, чем WFS-двигатель того же диаметра». Это позволяет сделать двигатель более легким, малогабаритным и с более гибкой геометрией.
Вместе с тем, наличие большего числа полюсов означает, что VFD способен вырабатывать более высокие частоты. Для определенной скорости и двигателя с ПМ показатель 415 Гц на входе не является исключительным. «У высокоскоростных мощных двигателей этот показатель может быть основным для разработки топологии сетиУГВ, также как и диапазон частот устройств управления»,- добавляет к сказанному Тэкстон.
В Powertec отмечают, что помимо необходимости коммутации бесколлекторного двигателя с ПМ с учетом его положения, другие проблемы в управлении этими двигателями такие же, что и у асинхронных двигателей той же мощности. По словам Ли, около половины используемых в настоящее время приводов настраиваются на тип двигателя с помощью программных алгоритмов управления коммутацией для бесколлекторных двигателей и управления скольжением для асинхронных двигателей.
«Эта процедура сведена к выбору в меню», — утверждает Ли. Он ссылается на способность бесколлекторного двигателя работать в качестве генератора с возбуждением от ПМ. «Там, где благодаря установке режима высоких скоростей имеют место скорости двигателя выше «базовой скорости’,’ генерируемое напряжение может значительно превысить допустимый уровень, предусмотренный конструкцией шины’,’- утверждает Ли. Это может нанести вред только в некоторых редких случаях, но должно быть согласовано при установке.
В Siemens сходятся во мнении, что проблемы управления не отличаются существенно от тех же проблем с асинхронными двигателями. Бесколлекторные двигатели с ПМ работают под управлением VFD с незначительно измененным алгоритмом программы.
Примеры использования
В DRS Technologies недавно прошел испытания на полной мощности в 36,5 МВт, 127 об/мин корабельный двигатель для ВМС США, который создавал крутящий момент более 2700000 Нм. В Canopy Technologies LLC, совместном предприятии DRS и Elliott Company Inc. (50/50), которое является ведущим производителем скоростного электропривода, завершено испытание промышленного двигателя (первое фото) мощностью 11,4 МВт (6225 об/мин).Утверждается, что это два самых мощных двигателя с ПМ в мире. Большие высокоэффективные двигатели с ПМ находят наилучшее применение в больших морских судах. Их использование особенно привлекательно из-за растущей стоимости топлива. DRS также производит высокоэффективные двигатели с ПМ, которые, как сообщается, достигают свыше 1,65 кВт/кг в диапазоне мощностей 380-750 кВт.
Среди множества сфер применения Powertec упоминает новую Advanced Gun System ВМС США для программы Stealth Destroyer, где используется множество больших высокодинамичных бесколлекторных двигателей с ПМ. Двигатель поднятия по высоте, имеющий диаметр всего 30 см, развивает крутящий момент более 1080 Нм при пиковой скорости 2000 об/мин (свыше 220 кВт в пике). По данным Powertec ВМС рекомендует использование бесколлекторных двигателей там, где это только возможно — в новых или модернизируемых приложениях — благодаря их меньшим размерам и массе.
Еще одна сфера применения включает надежное управление азимутом и углом места гигантской антенны весом 1800 т, входящей в систему Missile Defense Antenna. Для обеспечения необходимой мощности и высокой динамики были поставлены восемь бесколлекторных двигателей мощностью 170 кВт, управляющие азимутом, и четыре двигателя мощностью 37 кВт, управляющие углом места. Таким образом, общая мощность двигателей составляла 1500 кВт.
Двигатель с воздушным охлаждением от Powertec мощностью 300 кВт со станиной NEMA 3213T (40 см в диаметре), показанный ранее — это иллюстрация компактности этих машин. Вентилятор и распределительная коробка показаны в пропорции с реальным двигателем. Распределительная коробка кажется огромной из-за требований NEMA к ее объему при подключении многочисленных проводов.
Состояние технологии бесколлекторных двигателей с ПМ представляет собой своего рода головоломку. Несколько лет назад журнал Control Engineering отмечал, что по мере роста спроса могли бы производиться все более мощные двигатели. В журнале был поставлен вопрос: «Если такие двигатели будут созданы, появятся ли пользователи?» Эд Ли из Powertec формулирует эту мысль таким образом: «По мере того, как все большее число потребителей захотят иметь и начнут приобретать эти двигатели, тем большее количество двигателей более крупных размеров появится на рынке».
Вконтакте
Google+
§ 23.1. Синхронные машины с постоянными магнитами
Синхронные машины с постоянными магнитами (магнитоэлектрические) не имеют обмотки возбуждения на роторе, а возбуждающий магнитный поток у них создается постоянными магнитами, расположенными на роторе. Статор этих машин обычной конструкции с двух- или трехфазной обмоткой.
Применяют эти машины чаще всего в качестве двигателей небольшой мощности. Синхронные генераторы с постоянными магнитами применяют реже, главным образом в качестве автономно работающих генераторов повышенной частоты, малой и средней мощности.
Синхронные магнитоэлектрические двигатели. Эти двигатели получили распространение в двух конструктивных исполнениях: с радиальным и аксиальным расположением постоянных магнитов.
При радиальном
расположении постоянных
магнитов пакет ротора с пусковой
клеткой,
выполненный в виде полого цилиндра,
закрепляют
на наружной поверхности явно выраженных
полюсов
постоянного магнита 3. В цилиндре
делают межполюсные
прорези, предотвращающие замыкание
потока постоянного магнита в этом
цилиндре (рис.
23.1,  ).
).
При аксиальном
расположении магнитов
конструкция ротора аналогична конструкции
ротора асинхронного короткозамкнутого
двигателя. К
торцам этого ротора прижаты кольцевые
постоянные
магниты (рис. 23.1,  ).
).
Конструкции с аксиальным расположением магнита применяют в двигателях малого диаметра мощностью до 100 Вт; конструкции с радиальным расположением магнитов применяют в двигателях большего диаметра мощностью до 500 Вт и более.
Физические процессы,
протекающие при асинхронном
пуске этих двигателей, имеют некоторую
особенность,
обусловленную тем, что магнитоэлектрические
двигатели пускают в возбужденном
состоянии. Поле
постоянного магнита в процессе разгона
ротора наводит в обмотке статора
ЭДС , частота которой увеличивается
пропорционально
частоте вращения ротора. Эта ЭДС наводит
в обмотке статора ток, взаимодействующий
с полем постоянных магнитов и создающий тормозной момент
, частота которой увеличивается
пропорционально
частоте вращения ротора. Эта ЭДС наводит
в обмотке статора ток, взаимодействующий
с полем постоянных магнитов и создающий тормозной момент  , направленный
встречно вращению ротора.
, направленный
встречно вращению ротора.

Рис. 23.1. Магнитоэлектрические синхронные двигатели с радиальным (а) и
аксиальным (б) расположением постоянных магнитов:
1 — статор, 2 — короткозамкнутый ротор, 3 — постоянный магнит
Таким образом, при
разгоне двигателя с постоянными
магнитами
на его ротор действуют два асинхронных
момента (рис. 23.2): вращающий  (от тока
(от тока  , поступающего
в обмотку статора из сети) и тормозной
, поступающего
в обмотку статора из сети) и тормозной  (от тока
(от тока  ,
наведенного в обмотке статора полем
постоянного магнита).
,
наведенного в обмотке статора полем
постоянного магнита).
Однако зависимость
этих моментов от частоты вращения
ротора (скольжения) различна:
максимум вращающего момента  соответствует значительной частоте
(небольшому скольжению), амаксимум
тормозного момента МТ — малой частоте
вращения (большому скольжению). Разгон
ротора происходит под действием
результирующего момента
соответствует значительной частоте
(небольшому скольжению), амаксимум
тормозного момента МТ — малой частоте
вращения (большому скольжению). Разгон
ротора происходит под действием
результирующего момента  ,
который имеет значительный
«провал» в зоне малых частот вращения.
Из приведенных
на рисунке кривых видно, что влияние
момента
,
который имеет значительный
«провал» в зоне малых частот вращения.
Из приведенных
на рисунке кривых видно, что влияние
момента  на пусковые
свойства двигателя, в частности на
момент входа в синхронизм Мвх,
значительно.
на пусковые
свойства двигателя, в частности на
момент входа в синхронизм Мвх,
значительно.
Для обеспечения
надежного пуска двигателя необходимо,
чтобы минимальный
результирующий момент в асинхронном
режиме  и момент входа в синхронизмМвх, были
больше момента нагрузки.
Форма кривой асинхронного момента
магнитоэлектрического
и момент входа в синхронизмМвх, были
больше момента нагрузки.
Форма кривой асинхронного момента
магнитоэлектрического

Рис.23.2. Графики асинхронных моментов
магнитоэлектрического синхронного двигателя
двигателя в
значительной степени зависит от активного
сопротивления пусковой клетки и от
степени возбужденности двигателя,
характеризуемой величиной  ,
гдеЕ0 —ЭДС фазы
статора, наведенная в режиме холостого
хода при вращении ротора с синхронной
частотой. С увеличением
,
гдеЕ0 —ЭДС фазы
статора, наведенная в режиме холостого
хода при вращении ротора с синхронной
частотой. С увеличением  «провал»в кривой
момента
«провал»в кривой
момента  увеличивается.
увеличивается.
Электромагнитные процессы в магнитоэлектрических синхронных двигателях в принципе аналогичны процессам в синхронных двигателях с электромагнитным возбуждением. Однако необходимо иметь в виду, что постоянные магниты в магнитоэлектрических машинах подвержены размагничиванию действиеммагнитного потока реакции якоря. Пусковая обмотка несколько ослабляет это размагничивание, так как оказывает на постоянные магниты экранирующее действие.
Положительные
свойства магнитоэлектрических синхронных
двигателей — повышенная устойчивость
работы в синхронном режиме и равномерность
частоты вращения, а также способность
синфазного вращения нескольких
двигателей, включенных в однусеть.
Эти двигатели имеют сравнительно высокие
энергетические показатели
(КПД и  ,).
,).
Недостатки магнитоэлектрических синхронных двигателей — повышенная стоимость по сравнению с синхронными двигателямидругих типов, обусловленная высокой стоимостью и сложностью обработки постоянных магнитов, выполняемых из сплавов, обладающих большой коэрцитивной силой (ални, алнико, магнико и др.). Эти двигатели обычно изготовляют на небольшие мощности и применяют в приборостроении и в устройствах автоматики для привода механизмов, требующих постоянства частоты вращения.
Синхронные магнитоэлектрические генераторы. Ротор такого генератора выполняют при малой мощности в виде «звездочки» (рис. 23.3, а), при средней мощности — с когтеобразными полюсами и цилиндрическим постоянным магнитом (рис. 23.3,б). Ротор с когтеобразными полюсами дает возможность получить генератор с рассеянием полюсов, ограничивающим ударный ток при внезапном коротком замыкании генератора. Этот ток представляет большую опасность для постоянного магнита ввиду сильного размагничивающего действия.
Помимо недостатков, отмеченных при рассмотрении магнитоэлектрических синхронных двигателей, генераторы с постоянными магнитами имеют еще один недостаток, обусловленный отсутствием обмотки возбуждения, а поэтому регулировка напряжения в магнитоэлектрических генераторах практически невозможна. Это затрудняет стабилизацию напряжения генератора при изменениях нагрузки.
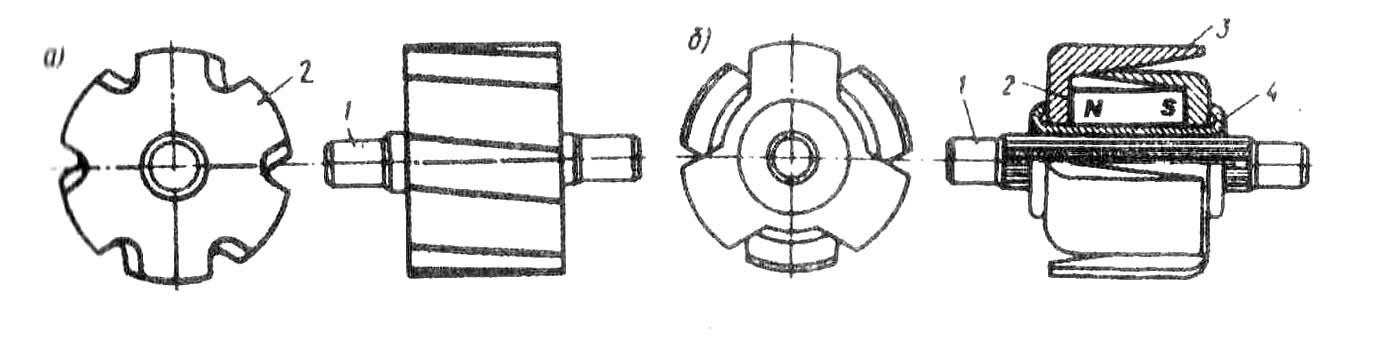
Рис.23.3. Роторы магнитоэлектрических синхронных генераторов:
1– вал;2– постоянный магнит;3 – полюс;4 – немагнитная втулка
29. Принцип действия синхронного двигателя. Характеристики синхронного двигателя. Методы пуска синхронной машины. Качания синхронных машин
Синхронный двигатель с постоянными магнитами, управляемый при помощи прогнозирующей модели
Библиографическое описание:
Павлов О. П. Синхронный двигатель с постоянными магнитами, управляемый при помощи прогнозирующей модели // Молодой ученый. 2019. №25. С. 135-138. URL https://moluch.ru/archive/263/61104/ (дата обращения: 27.01.2020).
В данной работе рассматривается метод управления синхронным двигателем с постоянными магнитами (СДПМ), который заключается в использовании прогнозирующей модели управления (ПМУ), позволяющей регулировать токи и скорость двигателя с заданной точностью.
Ключевые слова: синхронный двигатель, постоянные магниты, компенсация тока, прогнозирующая модель, трехфазный инвертор.
Синхронные двигатели с постоянными магнитами (СДПМ) широко исследованы и нашли применение в промышленном оборудовании, бытовых приборах, электромобилях, а также аэрокосмической технике [1]. По сравнению с асинхронными двигателями обладают преимуществами более высокого КПД при одинаковых конструкциях статора, а также при условии, что двигатели управляются одним и тем же частотным преобразователем [3].
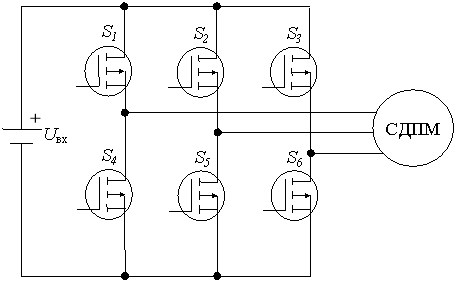
Рис. 1. Схема трехфазного инвертора для синхронного двигателя с постоянными магнитами (СДПМ)
Также у СДПМ лучший показатель мощность/объем по сравнению с другими двигателями [3].
Существует довольно большое разнообразие методов управления синхронными двигателями, которые обладают своими достоинствами и недостатками. Остановим внимание на методе с использованием прогнозирующей модели управления, учитывая то, что новые разработки в данной области позволяют обратить пристальное внимание на плюсы этого метода, такие как относительная простота схемы реализации обратной связи, а также хороший уровень адаптивных свойств [2]. Данный метод управления динамическими объектами базируется на математических методах оптимизации.
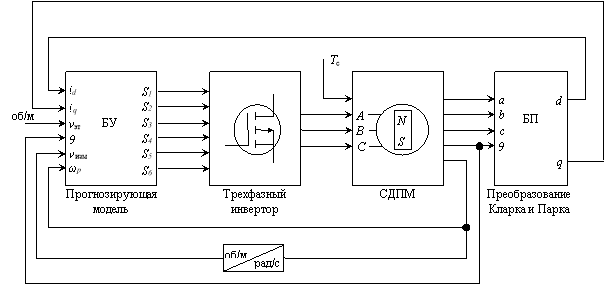
Рис. 2. Схема управления СДПМ при помощи прогнозирующей модели управления (ПМУ)
На рис. 2. изображена схема управления синхронным двигателем с постоянными магнитами. Источником питания для двигателя является трехфазный инвертор, в качестве ключей использующий полевые транзисторы. На затворы транзисторов подаются управляющие сигналы, поступающие с блока управления (БУ), которые формируются прогнозирующей моделью на основе данных обратной связи и эталонной скорости вращения ротора двигателя vэт, которая задается разработчиком. По ветвям обратной связи на входы БУ поступают компоненты статорного тока id и iq, которые получены преобразованием трехфазного тока при помощи блока преобразования (БП) методами преобразования Кларка и Парка. На оставшиеся входы подаются угол положения ротора θ, измеренное значение скорости вращения ротора vизм, а также угловая скорость вращения ротора двигателя ωр. При моделировании двигателю задается момент сопротивления движению Tс.
Моделирование СДПМ в пакете Simulink/Matlab показывает, что по сравнению с распространенным векторным управлением при управлении двигателя с помощью прогнозирующей модели можно достичь меньшего уровня скачков трехфазного тока при запуске двигателя, а также меньших искажений тока в установившемся режиме [1].

Рис. 3. Трехфазный ток двигателя под управлением ПМУ (а), при векторном управлении (б)
На рис. 4. изображен график изменения скорости вращения ротора, включающий в себя пусковой режим и режимы переключения скорости, а также график измеряемой скорости при заданном эталонном значении 1000 об/мин [1]. Результаты моделирования показывают, что измеряемая скорость вращения ротора двигателя в установившемся режиме близка к эталонной скорости 1000 об/мин, отличаясь от неё не более чем на 1 об/мин.
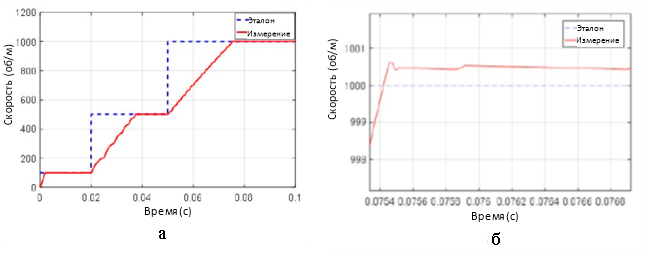
Рис. 4. Скоростные характеристики при разных эталонных скоростях. Полный график изменения скорости до 1000 об / мин (а). График при скорости двигателя 1000 об / мин (б).
Литература:
- Meiling Tang, Shengxian Zhuang, 2018. «On Speed Control of a Permanent Magnet Synchronous Motor with Current Predictive Compensation«, Energies, MDPI, Open Access Journal, vol. 12(1), pages 1–15, December.
- Шайхутдинов Д. В., Дубров В. И., Леухин Р. И., Наракидзе Н. Д., Щучкин Д. А., Январев С. Г. К Выбору типа регулятора для решения задачи управления электромагнитным приводом // Фундаментальные исследования. — 2015. — № 10–1. — С. 107–116.
- Левкин Д. Синхронный двигатель с постоянными магнитами // engineering-solutions.ru: Инженерные решения. URL: https://engineering-solutions.ru/motorcontrol/pmsm/ (дата обращения: 18.06.2019).
Основные термины (генерируются автоматически): синхронный двигатель, обратная связь, трехфазный инвертор, прогнозирующая модель, прогнозирующая модель управления, трехфазный ток, метод управления, скорость двигателя, схема управления, установившийся режим.
Похожие статьи
Обзор алгоритмов управления асинхронными электроприводами
В случае этого метода управления позиция ротора ρr, необходимая для трансформации координат, получается на основании измеренных значений токов статора, используя модель потока. В результате получаются два пути управления: моментом (активный ток) и потоком…
V. Модель управления скоростью асинхронного двигателя…
Состояния переключения трехфазного инвертора. V. Модель управления скоростью асинхронного двигателя сиспользованием инвертора. Моделирование выполняется с помощью инвертора с использованием метода широтно-импульсной модуляции.
Математическая модель электропривода на базе синхронного…
Рис. 1. Общая схема модели электропривода на базе синхронного двигателя со встроенными постоянными магнитами.
Инвертор — это элемент, которые преобразует постоянный ток в трехфазный переменный, а также включает в себя систему управления двигателями.
Алгоритм синтеза прогнозирующего управления…
Предложен алгоритм прогнозирующего управления с интегральной составляющей в контуре управления, который позволяет обеспечить астатизм системы и выполнения ограничений, накладываемые на переменные состояния, а также задающие воздействия.
Выбор системы управления двигателем электромобиля
Инвертор — это элемент, которые преобразует постоянный ток в трехфазный переменный, а также включает в себя систему управления двигателями. Чтобы понять, какие параметры влияют на систему управления, рассмотрим структуру инвертора, изображенную на рисунке 2…
асинхронный двигатель, система управления, векторное…
Блок векторного управления (Vector Control), представленный на рис. 8, включает в себя: регулятор скорости, регулятор тока, блоки расчета токов и потока, угла положения и преобразователи координат. Сборку каждой из схем следует производить в блоках Subsystem…
Векторное управление активным выпрямителем напряжения
Рис. 3. Система управления АВН по проекциям обобщенного вектора тока. В этой системе управления блок преобразования координат «XY-ABC» осуществляет преобразование проекций Ix и Iy обобщенного вектора сетевого тока из вращающейся системы координат к трехфазной…
Моделирование системы АИН ШИМ — асинхронный двигатель…
Функциональная схема системы трехфазный автономный инвертор с ШИМ – асинхронный
Формирователи сигналов управления имеют взаимно инверсные релейные характеристики [2] и
В каждом из состояний инвертора две фазы двигателя с помощью ключей соединены…
Математическое описание синхронного двигателя…
При анализе и синтезе технических объектов используются их математические модели. При этом математические модели либо известны, либо получены вручную. Известные математические модели указывают на отработанную методику получения модели…
СРАВНЕНИЕ СИНХРОННЫХ ДВИГАТЕЛЕЙ С ПОСТОЯННЫМИ МАГНИТАМИ
Актуальность темы
В последнее время всё большее распространение получают бесконтактные электрические машины с постоянными магнитами (ПМ). Использование ПМ позволяет получить требуемые регулировочные характеристики по напряжению и частоте вращения при значительно меньшей мощности возбуждения, (если кроме ПМ для возбуждения используются дополнительные обмотки) и объеме магнитной системы по сравнению с классическими электромагнитными системами возбуждения синхронных машин. Применение ПМ с высокой удельной энергией позволяет улучшить массогабаритные, энергетические и стоимостные показатели машин.
Важной особенностью магнитоэлектрических машин является отсутствие скользящих контактов, что позволяет применять их в системах автоматики, приводах подачи станков, компрессорах, насосах, шаровых мельницах, вентиляторах, прецизионных системах слежения
Недостатками этих машин является невозможность регулирования потока ПМ (если не применяются дополнительные средства), пульсации момента, обусловленные взаимодействием магнитов, расположенных на одном сердечнике (как правило, на роторе) с зубцами другого сердечника. Эти моменты проявляются при холостом ходе и в значительной мере обусловливают пульсации момента при нагрузке.
Значительные пульсации момента иногда являются причиной повышенных вибраций, шума и износа подшипников.
В работе рассмотрено влияние различных способов намагничивания ПМ на характеристики магнитоэлектрических машин.
Историческая справка [2]
Бесконтактные электрические машины с постоянными магнитами – первый тип электромеханического преобразователя энергии, созданного человеком. Ещё в 1831 году М. Фарадей демонстрировал принцип электромагнитной индукции с помощью устройств, содержащих неподвижные обмотки и перемещающиеся постоянные магниты. Начиная с 1832 года, различные исследователи предлагали целый ряд оригинальных конструкций электрических машин с постоянными магнитами. В 1834 году Якоби строит электродвигатель, основанный на принципе притяжения и отталкивания между электромагнитами, а в 1842 г — первый в мире получивший практическое применение магнитоэлектрический генератор постоянного тока.
Однако в дальнейшем, эти машины были практически вытеснены машинами с электромагнитным возбуждением. Это объясняется тем, что по энергетическим и массогабаритным показателям постоянные магниты долгое время значительно уступали электромагнитам.
Примерно до середины ХХ века единственным типом магнитотвёрдых материалов были мартенситные стали, среди которых наибольшее применение получили хромистые, вольфрамовые и кобальтовые стали.
Вольфрамовые стали подвержены значительному структурному старению, в особенности при повышенных температурах. Нагревание выше температуры 1000 С влечёт за собой почти полную потерю ими свойств постоянного магнита. С другой стороны, эти стали легко обрабатываются, обладают высокой магнитной стабильностью, не боятся ударов.
Хромистые стали были разработаны в период первой мировой войны, когда испытывался недостаток вольфрама. Введение хрома повышает остаточную индукцию и коэрцитивную силу. Старение хромистой стали значительно меньше вольфрамовой, она легко механически обрабатывается и дешёва. Наибольшее применение эти стали в гистерезисных двигателях (магнитофоны, проигрыватели и т.д.).
Существенным достижением явилось освоение производства кобальтовых сталей. Добавка кобальта положительно влияет на свойства стали: повышается остаточная индукция, коэрцитивная сила.
В дальнейшем появились также постоянные магниты, реализуемые на основе сплавов железа с кобальтом, молибденом, хромом, некоторыми другими металлами, с относительно высокими удельными свойствами.
Обзор по постоянным магнитам
Магниты обладают высокой коэрцитивной силой – до 1000 кА/м, что значительно снижает возможность размагничивания магнитов под действием реакции якоря и обеспечивает стабильность рабочих характеристик. Кроме того, обладая высокой энергией, которая характеризуется произведением BHmax, редкоземельные магниты позволяют улучшить массогабаритные показатели машин и добиться большей удельной мощности, чем в машинах других типов.
Современные виды постоянных магнитов и их характеристики [3]
Хорошие ь механические и магнитные свойства имеют сплавы на основе драгоценных металлов, например, сплавы платины, но они очень дороги и их применение не целесообразно.
Из известных в настоящее время магнитотвердых материалов, в свете указанных требований, целесообразно рассматривать следующие группы:
• Магниты с полимерным наполнителем, применяемые в медицине эластичные магнитофоры (магнитопласты, магнитоэласты). Br = до 0.05 Тл
• Магнитопласты на основе наполнителя (например, порошка анизотропного NdFeB). Поддаются механической обработке, благодаря пластичности (как резина) и возможности изготовления сложных форм методом литья под давлением (в том числе, с монтажными отверстиями и средствами крепления). Не нагреваются при работе в переменных электромагнитных полях (нечувствительны к воздействию вихревых токов).
Максимальная рабочая температура — до 120-220 градусов Цельсия, в зависимости от теплостойкости связующего материала. Br = 0.5 — 0.6 Тл (Nd-Fe-B).
• Ферриты (прессованные керамические ферритобариевые и ферритостронциевые, недорогие ферромагниты чёрного цвета). В отличие от «железных» магнитов, имеют очень высокое электрическое сопротивление (поэтому феррит бария используют в цепях, подвергающихся действию высокочастотных полей), хорошую механическую прочность, коррозионную стойкость, меньший вес, по сравнению с железными — в 1.5-2 раза. Ферритовые магниты могут быть намагничены с образованием нескольких полюсов на цельном изделии.
Имеют неплохую устойчивость к воздействию внешних магнитных полей. По стоимости — на порядок дешевле ЮНДК, имея, при этом, более высокие показатели коэрцитивной силы. Широко применяются в двигателях постоянного тока, в генераторах, в профессиональных и домашних аудио-системах.
Недостатки ферромагнитов — хрупкость и твёрдость (обрабатывать можно только шлифованием и при помощи алмазной резки). Tc of Br ~ -0.20 % на °C (Температурный коэффициент) — определяет, насколько магнитная индукция зависит от температуры. Величина -0.20 означает, что если температура увеличится на 100 градусов Цельсия, магнитная индукция уменьшится на 20 %. Уменьшение коэрцетивной силы при охлаждении ниже -20°С (что снижает, на морозе, стойкость к размагничиванию магнитным полем; зимой, при -60 градусах — магнитные свойства необратимо теряются и не восстанавливаются при возврате к нормальным термическим условиям) или при нагреве (особенно чувствительны бариевые). Если температура изменяется быстрее 5-10°C/мин — на феррите образуются трещины, что ухудшает его физические свойства. Несмотря на указанные недостатки, благодаря низкой стоимости ферритные магнитотвердые материалы находят достаточно широкое применение для использования в неответственных электрических машинах.
• Термостабильные литые или спечённые магниты «Альнико» (AlNiCo, российское название — ЮНДК) на основе сплавов железо-аллюминий-никель-медь-кобальт. Они легче редкоземельных самарийкобальтовых, при примерно одинаковых параметрах индукции, и заметно дешевле их. Имеют высокую коррозионную и радиационную стойкость. Используются в акустических системах и динамических студийных микрофонах (ставят Alnico V), в гитарных звукоснимателях, в электродвигателях и электрогенераторах, в приборостроении (сенсоры, реле и т.д.) Недостаток — AlNiCo хрупкие (обрабатываются полированием, шлифованием, резкой абразивным кругом) и легко размагничиваются (низкая коэрцитивная сила) под воздействием внешнего магнитного поля, что делает неверными показания стрелочных приборов, в которых они установлены.
• Термоустойчивые деформируемые магниты типа ХК (железо-хром-кобальт, Fe-Cr-Co). Прочность и пластичность современных типов этого сплава — на порядок превосходит аналогичные показатели ЮНДК24 (Алнико 5) при сопоставимых магнитных свойствах. Могут быть получены в виде холоднокатаного листа, горячекатаного и кованого прутка для последующей механической и термомагнитной обработки.
• Спечённые редкоземельные магниты на основе сплавов самарий-кобальт (SmCo, долговечная металлокерамика). Имеют лучшую коррозионную стойкость (то есть, не ржавеют, поэтому и не нуждаются в защитном покрытии) по сравнению с остальными редкоземельными материалами и большие значения максимальной рабочей температуры (термостабильные до 350°С) и коэрцитивной силы (то есть, магнитотвёрдые — устойчивые к размагничиванию). По сравнению с ЮНДК — на порядок большая коэрцетивная сила по намагниченности.
Недостатки — хрупкость и высокая цена. Применяются в космических аппаратах и мобильных телефонах, в мотоциклах и газонокосилках, в авиационной и компьютерной технике, в медицинском оборудовании, в миниатюрных электромеханических приборах и устройствах (наручных часах, наушниках и т.д.) Используются в современном приборостроении.
• Неодимовые — редкоземельные магниты на основе сплавов неодим-железо-бор (NdFeB). Они хрупкие и чувствительные к температуре (предел допустимого нагрева — зависит от марки магнита). После сильного перегрева — необратимо и полностью теряется намагниченность (восстановить можно перемагничиванием на специальной установке). Имеют невысокую коррозионную стойкость — легко окисляются (ржавеют), если повреждено антикоррозионноее покрытие (краска, лак, тонкая металлическая плёнка из никеля, меди или цинка). В виде порошка — могут воспламениться, с выделением ядовитого дыма. Лучше поддаются механической обработке — гибкие Nd-магнитопласты (NdFeB). Спечённые неодимовые магниты имеют преимущество — наибольшую, по сравнению с остальными видами, остаточную индукцию и очень высокое энергетическое произведение. Максимальная рабочая температура повышается — при добавлении кобальта вместо железа, но это ведёт к удорожанию материала. Широко применяются в компьютерной технике (двигатели электроприводов дисков, устройства считывания и записи информации), в моторах и датчиках.
Сравнение наиболее употребляемых ПМ различных марок [3]:

Рисунок 1. Сравнительные диаграммы различных материалов ПМ [3]
Нужно отметить, что представленные диаграммы характеризуют наиболее распространенные характеристики семейств магнитных материалов. Для магнитов различных производителей конкретные характеристики могут отличаться от приведенных (например, коэрцитивная сила магнитов Nd-Fe-B при некоторых добавках может достигать величины 22 кЭ). Тем не менее, диаграммы демонстрируют общие соотношения между семействами магнитных материалов.
Варианты расположения постоянных магнитов в синхронной машине
1) Поверхностные магниты
Магниты располагают на внешней поверхности ротора, чем обеспечивается простота конструкции, хорошие динамические характеристики и сравнительно низкая стоимость.
2) Встроенные магниты
Использование встроенных магнитов позволяет увеличить производительность электрической машины за счет возрастания плотности магнитного потока при сохранении высокого момента на больших скоростях вращения.
Способы крепления ПМ:
Закрепить магниты можно разными способами:
1) Приклеить их к ротору. Этот вариант при высокой скорости вращения малопригоден. Но в последнее время разработан ряд клеев сочень высокими свойствами.
2) Разнообразными бандажами. Это может быть как самая простая сталь или сталь с особыми магнитными свойствами, так и всевозможные титановые сплавы. Также эту задачу можно решить с помощью углеводородных материалов (карбоновые, базальтовые нити и т.д).
Методы исследования [1]
Для моделирования магнитного поля двигателя применяется конечно – элементная программа FEMM (Finite Element Method Magnetics), используемая в учебном процессе кафедры электромеханики (программа разработана профессором Массачуcетского Технологического института Д. Микером (David Meeker), США) и доступна для широкого пользования через сеть интернет.
Картины поля при радиальном и параллельном намагничивании почти не отличаются друг от друга, имеют примерно одинаковую индукцию в ярме и распределение индукции в зазоре, близкой к синусоидальной. Масса магнитов также одинакова. Таким образом для электрической машины малой полюсности и малой мощности непринципиально какой тип намагниченности ПМ будет выбран.
Применение магнитов с тангенциальной намагниченностью и намагниченностью по Хальбаху является нецелесообразным на машинах с малым количеством полюсов, что можно сказать, взглянув на полученную картину поля и распределения магнитной индукции в зазоре четырёхполюсной машины.
Гораздо лучше данный типы намагниченности проявляет себя на многополюсных машинах.
Заключение:
1) Сделан обзор литературы
а) по магнитам (используемые материалы, конфигурация, расположение, вид намагничивания)
б) по обмоткам, применяемым в бесконтактных ЭМ с ПМ
2) Проведен анализ конечно-элементных моделей, показано, что области применения различных типов намагничивания магнитов зависят от числа полюсов проектируемых машин.
Показано также, что конечно-элементные модели являются наглядным средством для сравнительной оценки технических показателей магнитоэлектрических машин.
Список литературы:
- David Meeker, Finite Element Method Magnetics: OctaveFEMM: User’s Manual – 2006 – http://www.femm.info/Archives/doc/octavefemm.pdf
- Балагуров В.А., Галтеев Ф.Ф., Ларионов А.Н.: Электрические машины с постоянными магнитами – изд. «Энергия», 1964 – С. 4-6, 16-17.
- Энциклопедия – Современные постоянные магниты – Электронный ресурс — http://www.valtar.ru/Magnets4/mag_4_27.htm