


Гидравлическая система синхронного хода нескольких гидроцилиндров
Одним из распространенных способов синхронизации хода гидравлических цилиндров является так называемый «гидравлический боуденовский трос». Правда, применение боуденовского троса в гидравлических системах связано с определенными затратами.
Два гидроцилиндра одинаковых размеров со сплошными поршневыми штоками последовательно подключаются друг к другу. Благодаря этому второй цилиндр повторяет движение первого цилиндра, на который подается давление насоса. Поскольку обе последовательно включенные полости цилиндров столб жидкости только перемещают, ход цилиндров вследствие внутренних, а возможно и внешних утечек, без подпитки может измениться.
Во избежание нежелательных последствий такого изменения хода поршней полость «боуденовского троса» с помощью расположенного справа 4/3-распределителя 2 через каждый ход соединяется кратковременно с магистралью подачи насоса или бака.
Неравномерный ход поршня имеет следующие причины:
а) левый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 3.
Причина: недостаток жидкости между цилиндрами.
Способ устранения: с помощью левого концевика 3 включить магнит а гидравлического распределителя 2. Рабочая жидкость будет поступать в магистраль управления до тех пор, пока правый цилиндр также не включит концевой выключатель. Магнит а снова отключается.
б) Правый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 4.
Причина: избыток жидкости между цилиндрами.
Способ устранения: с помощью правого концевика 4 включить магнит b распределителя 2.
Этим открывается гидравлически деблокируемый обратный клапан 5 и жидкость стекает до тех пор, пока левый цилиндр также не займет конечное положение.
С помощью левого концевого выключателя 3 магнит b отключается. В этом случае синхронность хода поршня зависит не только от количества жидкости между цилиндрами, но и от точности исполнения обоих цилиндров.
Общеизвестен тот факт, что в технике невозможно изготовить две абсолютно одинаковые детали.
Поскольку подпиточный распределитель 2, как правило, имеет золотниковую конструкцию, возникает определенная утечка.
Поэтому необходимым условием надежной работы всей системы является установка седельного обратного клапана 5.
Регулирование синхронного ходе по принципу дозирования
На принципиальной схеме изображена система регулирования синхронного хода одного из валиков трехвалкового гибочного пресса. На схеме изображены два нижних валка, регулируемых в горизонтальном направлении. Верхний валик регулируется вертикально.
Регулирование синхронного хода осуществляется в обоих направлениях и обеспечивается за счет соединения клапана синхронного хода с подающим трубопроводом перед гидравлическими распределителями 8 и 9. а также путем соединения точек подключения А распределителей со сторонами поршневых штоков соответствующих цилиндров и точек подключения В со сторонами поршней других цилиндров. Обратные дроссельные клапаны 6 и 7 служат для декомпрессии рабочей жидкости при переключении из прессования на обратный ход.
Синхронный ход цилиндров в этой системе обеспечивается за счет того, что рабочая жидкость из опережающего цилиндра поступает во второй цилиндр определенными дозами.
Подача рабочей жидкости в цилиндры 12 и 13 осуществляется отдельно насосами 1 и 2. Таким образом, с самого начала обеспечивается некоторая предварительная дозировка.
Кроме того, в этом случае цилиндры не мешают друг другу.
Дозировка рабочей жидкости происходит через регулирующий клапан 14.
Регулирующий клапан компенсирует разность рабочей жидкости, которая может возникнуть:
- из-за неодинаковой подачи насосов,
- в результате сжатия рабочей жидкости,
- вследствие неодинаковой утечки в приборах,
- в результате люфтов подшипников машины.
Направление движения цилиндров определяется распределителями 8 и 9. Напорные клапаны 10 и 11 при выдвижении цилиндров выполняют функции клапанов противодавления.
Качество работы клапана синхронного хода в основном зависит от работы системы обнаружения ошибок.
Регулирующий клапан, как изображено на принципиальной схеме, включается с помощью балансира 15.
Настройка синхронизации. Метка первого цилиндра
Настройка синхронизации. Метка первого цилиндра. |
Как известно, практически все процессы в ДВС периодические, т.е. повторяются через каждый рабочий цикл. По этому удобно проводить анализ, видя на экране один полный рабочий цикл, при чем начало отображаемого цикла должно совпадать с началом соответствующего сигнала первого цилиндра. Для того, что бы из периодического сигнала ДВС выделить один полный цикл необходим дополнительный сигнал — метка первого цилиндра (МПЦ), который будет единственным в пределах полного цикла ДВС. Как видно, без МПЦ невозможно определить какой импульс какому цилиндру соответствует.
Осциллограмма напряжения системы зажигания без МПЦ
Метка первого цилиндра (МПЦ) – импульс в пределах полного рабочего цикла, однозначно идентифицирующий импульс зажигания в первом цилиндре. Под однозначной идентификацией подразумевается, что МПЦ находится значительно ближе к импульсу зажигания в первом цилиндре, чем к импульсам остальных цилиндров. Начало МПЦ не обязательно должно совпадать с началом пробоя в первом цилиндре, МПЦ просто должна быть как можно ближе к импульсу зажигания в первом цилиндре. Также не обязательна и привязка именно к первому цилиндру, т.е. метка может идентифицировать любой из цилиндров, так как во всех тестах есть возможность выбрать номер цилиндра по которому производится синхронизация.
Осциллограмма напряжения системы зажигания с МПЦ. Можно однозначно определить где какой цилиндр.
В режиме осциллографа и покадровом режиме логический канал, возможно использовать как внешний источник синхронизации, при этом данные логического канала не отображаются на экране. Т.е. если на логический канал подать МПЦ, то начало развертки будет совпадать с началом полного рабочего цикла — сигнал ДВС не будет “бегать” по экрану (подробнее режимы синхронизации описаны в “Руководстве по эксплуатации” стр.72). При синхронизации в режиме самописца, возможности логического канала практически аналогичны возможностям аналоговых каналов. Также в режиме самописца данные логического канала отображаются на экране аналогично аналоговым каналам.
В качестве источника МПЦ можно использовать сигнал с высоковольтного провода одного из цилиндров (для классической или DIS систем зажигания), сигнал магнитного поля катушки зажигания, сигнал первичной цепи зажигания (для индивидуальной системы зажигания) либо сигнал управления форсункой.
Режимы работы логического канала
Логический канал может работать в одном из двух режимов: логический и аналоговый. Рекомендуется использовать режим аналогового канала, так как он позволяет провести автоматическую настройку без участия пользователя, а так же получить более стабильную синхронизацию на разных режимах работы двигателя.
| — логический канал используется как компаратор, автонастройка МПЦ запрещена | |
| — логический канал используется как аналоговый, автонастройка МПЦ запрещена | |
| — логический канал используется как компаратор, автонастройка МПЦ разрешена | |
| — логический канал используется как аналоговый, автонастройка МПЦ разрешена |
Выход логического канала будет соответствовать логической единице, если значение входного напряжения превышает заданное значение порога сравнения, и логическому нулю, если не превышает.
Принцип работы логического канала в режиме компаратора
Входной сигнал поступает на компаратор с настраиваемым из программы порогом сравнения. Логический канал, также как и все аналоговые каналы, является универсальным, т.е. может использоваться для разнообразных целей, например, для разметки, синхронизации и т.д.
Более детально с настройкой логического канала в режиме компаратора можно ознакомиться в статье «Настройка логического канала в качестве метки первого цилиндра»
Режим низкочастотного аналогового канала
Важно!
Поддержка данной функции реализована только в последней версии микропрограммы (v0.08). Поэтому для использования логического канала в качестве низкочастотного аналогового канала предварительно необходимо обновить ПО устройства.
Логический канал можно использовать как дополнительный аналоговый канал, работающий на меньшей частоте дискретизации, но достаточной для оцифровки импульса МПЦ, включение которого не приводит к уменьшению общей максимальной частоты дискретизации.
Работа логического канала в режиме аналогового
Для разрешения использования логического канала в качестве низкочастотного аналогового канала необходимо включить соответствующий флажок на вкладке управления логическим каналом.
Работа логического канала в режиме аналогового
Автоматическая настройка логического канала
Примечание!
Автонастройку необходимо проводить при включенном двигателе, работающем на холостых оборотах.
Реализовано два режима автоматической настройки:
1. автоматическая настройка МПЦ перед каждым запуском процесса регистрации в режиме самописца
2. ручной запуск автоматической настройки МПЦ.
В первом случае необходимо щелкнуть по кнопке разрешения автонастройки зафиксировав ее в утопленном состоянии.
Автоматическая настройка МПЦ перед каждым запуском
Уведомление об автоматической настройке
Данный режим удобно использовать в случае частой смены датчика синхронизации или источника МПЦ (ВВ провод, первичная цепь зажигания, форсунка и т.д.) либо большого потока автомобилей разных марок.
Второй режим позволяет немедленно запустить процесс автоматической настройки МПЦ, для чего необходимо щелкнуть по кнопке разрешения автонастройки удерживая клавишу Ctrl. Данный режим удобно использовать при диагностике различных систем одного и того же автомобиля, т.е. время на автонастройку будет потрачено только один раз.
Источники сигнала синхронизации
Как отмечалось выше, в качестве источника МПЦ можно использовать сигнал с емкостного, индуктивного датчиков, а также первичной цепи системы зажигания или сигнала форсунки.
В большинстве случаев, для получения сигнала синхронизации удобнее использовать систему зажигания. В зависимости от типа системы зажигания, необходимо произвести следующие настройки.
Классическая система зажигания
Необходимо использовать емкостной датчик синхронизации Сх1. Устанавливать его необходимо на высоковольтный провод свечи 1го цилиндра.
Установка датчика синхронизации на классической системе зажигания
1. Датчик синхронизации Cx1
2. ВВ провод 1-го цилиндра
3. Катушка зажигания
4. Трамблер
DIS система зажигания
Также необходимо использовать емкостной датчик синхронизации Сх1. Устанавливать необходимо также на ВВ провод свечи 1го цилиндра.
Установка датчика синхронизации на DIS системе зажигания
1. Датчик синхронизации Cx1
2. ВВ провод 1-го цилиндра
3. DIS Катушка зажигания
Особенностью данной системы зажигания является то, что искра в каждом цилиндре происходит дважды за один рабочий цикл (рабочая и холостая искра). Это может привести к появлению двух МПЦ: действительной и ложной.
1. Действительная МПЦ
2. Ложная МПЦ
Как правило, действительная метка шире ложной и программа при анализе сигналов ее игнорирует. При возникновении трудностей с анализом, необходимо провести автоматическую настройку МПЦ на установившемся ХХ либо вручную уменьшить порог срабатывания компаратора.
Также возможна проблема, когда ВВ импульс первого цилиндра имеет положительную полярность, но имеет большой импульс отрицательной полярности в момент заряда. При этом МПЦ будет иметь «расщепленный» вид:
«расщепление» МПЦ
Для устранения этого необходимо в файле MtPro.ini в разделе [Osc] вручную добавить параметр LfcAutoPositive=1.
Индивидуальная система зажигания
Необходимо использовать индуктивный датчик синхронизации Lx1. Устанавливать датчик необходимо на катушку зажигания первого цилиндра в соответствии с рекомендациями в статье «Диагностика индивидуальной системы зажигания».
Установка датчика синхронизации на индивидуальную систему зажигания
1. Датчик синхронизации Lx1
2. Индивидуальная катушка зажигания 1-го цилиндра
При невозможности синхронизации от первого цилиндра, необходимо выбрать любой другой цилиндр, при этом изменить соответствующую настройку в окне анализа вторичного напряжения.
Панель подключения и задания номер цилиндра синхронизации
Первичная цепь системы зажигания
Необходимо использовать измерительный щуп с иглой. Катушка зажигания имеет минимум 2 вывода подключения, один из которых является управляющим. К нему и необходимо подключаться измерительным щупом.
Подключение измерительного щупа к индивидуальной катушке зажигания
1. Индивидуальная катушка зажигания 1-го цилиндра
2. Разъем катушки зажигания
3. Измерительный щуп с иглой
Синхронизация от сигнала управления форсункой
При выборе данного варианта синхронизации следует учитывать следующие особенности.
1. Синхронизацию данным способом можно проводить только на системах с фазированным впрыском.
2. Следует учитывать, что некоторые системы впрыска могут менять режим впрыска на попарно-параллельный либо одновременный в зависимости от режима работы двигателя.
3. Обычно (но не всегда!) впрыск топлива форсункой проводится на фазе выпуска, перед открытием впускного клапана, что соответствует смещению около 360° от момента искрообразования. Следовательно, для привязки к импульсу зажигания 1-го цилиндра, необходимо подключаться к форсунке цилиндра, работающего в противофазе с 1-вым. В случае порядка работы цилиндров 1-3-4-2, нужно подключать щуп к 4-той форсунке, а в настройках программы анализа указывать 1-вый цилиндр. И наоборот, в случае синхронизации от 1-вой форсунки, указывать в настройках 4-тый цилиндр.
Необходимо использовать измерительный щуп с иглой. Форсунка имеет 2 вывода подключения, один из которых является управляющим. К нему и необходимо подключаться измерительным щупом.
Подключение измерительного щупа к форсунке
1. Топливная форсунка
2. Измерительный щуп с иглой
Автор: Евгений Куришко
Синхронный реактивный двигатель
Дмитрий Левкин
Синхронный реактивный электродвигатель — синхронный электродвигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов [1].Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой, и состоит из корпуса и сердечника с обмоткой.

Синхронный реактивный двигатель

Статор синхронного реактивного электродвигателя с распределенной обмоткой
Выделяют три основных типа ротора реактивного двигателя: ротор с явновыраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.

Ротор с явновыраженными полюсами

Аксиально-расслоенный ротор

Поперечно-расслоенный ротор
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи. Амплитуда момента прямо пропорциональна разницы между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент.

Линии магнитного поля синхронного реактивного электродвигателя
Главная идея может быть объяснена с помощью рисунка представленного ниже. Объект «a» состоящий из анизотропного материала имеет разную проводимость по оси d и оси q, в то время как изотропный магнитный материал объекта «b» имеет одинаковую проводимость во всех направлениях. Магнитное поле, которое прикладывается к анизотропному объекту «a», создает вращающий момент если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «a» не совпадает с линиями магнитного поля, объект будет вносить искажения в магнитное поле. При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
 в магнитном поле")
Объект с анизотропной геометрией (a) и изотропной геометрией (b) в магнитном поле

Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном электродвигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет существовать момент направленный на то, чтобы уменьшить полную потенциальную энергию системы, путем уменьшения искажения поля по оси q ( ). Если угол
). Если угол  сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
Ток статора отвечает за намагничивание и за создание момента, который пытается уменьшить искаженность поля. Управление моментом осуществляется путем контроля фазы тока, то есть угла между вектором тока обмоток статора и d-осью ротора во вращающейся системе координат.
- Преимущества:
- Простая и надежная конструкция ротора:
ротор имеет простую конструкцию, состоящую из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки. - Низкий нагрев:
так как в роторе отсутствуют токи, он не нагревается во время работы, увеличивая срок службы электродвигателя. - Нет магнитов:
снижается конечная цена электродвигателя, так как при производстве не используются редко земельные металлы. При отсутствии магнитных сил упрощается содержание и техническое обслуживание электродвигателя. - Низкий момент инерции ротора:
так как на роторе отсутствует обмотка и магниты, момент инерции ротора ниже, что позволяет электродвигателю быстрее набирать обороты и экономить электроэнергию. - Возможность регулирования скорости:
в виду того, что синхронный реактивный электродвигатель для своей работы требует частотный преобразователь, имеется возможность управления скоростью вращения реактивного двигателя в широком диапазоне скоростей.
- Недостатки:
- Частотное управление:
для работы требуется частотный преобразователь. - Низкий коэффициент мощности:
из-за того, что магнитный поток создается только за счет реактивного тока. Решается за счет использования частотного преобразователя с коррекцией мощности.
Смотрите также
8. Синхронные двигатели. Технические средства автоматизации и управления. Учебное пособие
8.1. Принцип действия и виды синхронных двигателей
8.2. Специальные синхронные двигатели
8.2.1. Гистерезисные двигатели
8.2.2. Шаговые двигатели
8.3. Бесконтактные двигатели переменного тока
8.1. Принцип действия и виды синхронных двигателей
Синхронные двигатели СД небольшой мощности применяются в системах автоматики. Поскольку в синхронных двигателях частота вращения жестко связана с частотой питания, такие двигатели применяются либо в системах, требующих строго постоянной частоты вращения, либо при частотном управлении скоростью.
В цифровых системах автоматики находят широкое применение шаговые двигатели, в обмотки статора которых поступают импульсы тока и при поступлении каждого импульсов происходит поворот ротора на определенный угол — двигатель совершает шаг. К группе синхронных двигателей можно отнести также двигатели, частота питания которых зависит от частоты вращения — это так называемые вентильные двигатели.
Статор синхронной машины выполнен аналогично статору асинхронной машины. На нем расположена  -фазная (обычно трехфазная) обмотка.. Она создают вращающееся магнитное поле. У синхронной машины может быть ротор различного типа. В любом случае ротор СД создает постоянный по величине вектор магнитного потока, направление которого меняется в зависимости от положения ротора. Взаимодействие полей ротора и статор создает вращающий момент двигателя. Наибольший момент возникает тогда, когда угол между векторами полей ротора и статора близок к нулю. Ротор вращается синхронно с полем статора, поэтому двигатель называется синхронным.
-фазная (обычно трехфазная) обмотка.. Она создают вращающееся магнитное поле. У синхронной машины может быть ротор различного типа. В любом случае ротор СД создает постоянный по величине вектор магнитного потока, направление которого меняется в зависимости от положения ротора. Взаимодействие полей ротора и статор создает вращающий момент двигателя. Наибольший момент возникает тогда, когда угол между векторами полей ротора и статора близок к нулю. Ротор вращается синхронно с полем статора, поэтому двигатель называется синхронным.
|
nр = nс= (60f)/p. |
(3.1.2) |
Где f – частота напряжения статора, а p – число пар полюсов.
1. У СД с обмоткой на роторе ротор состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор. Роторы таких машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). Электромагнитная схема синхронной машины имеет вид (рис90):
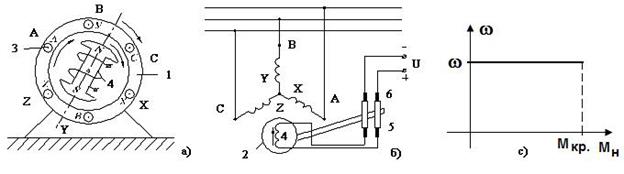
Рис. 90. Электромагнитная схема СД (а), схема ее включения (б), характеристика (с)
Обмотка ротора 4 состоит из одной или нескольких катушек, образующих многополосную систему с тем же числом пар полюсов р, что и обмотка статора 3. Обмотка ротора соединяется с внешним источником питания Uв посредством контактных колец 5 и щеток 6.
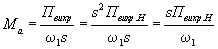
2. Синхронный двигатель, на роторе которого отсутствует обмотка возбуждения, называется синхронным реактивным двигателем. Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Рис. 91.
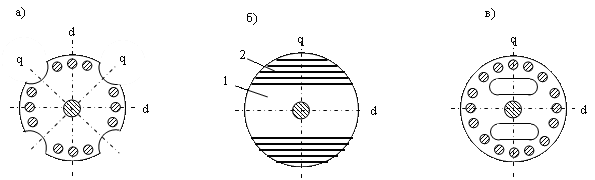
Рис. 91. Роторы синхронных реактивных микродвигателей
Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора. Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма. Рис 92..
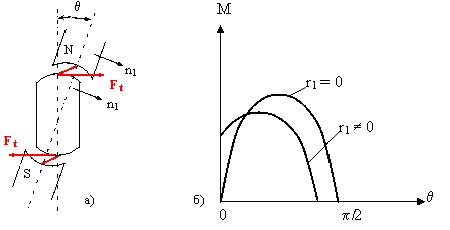
Рис. 92. Принцип действия синхронного реактивного двигателя
Электромагнитный момент синхронного реактивного двигателя без учета активного сопротивления статора r1 выражается следующей зависимостью:
|
|
(3.2.1) |
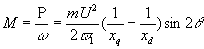 ,
,где xd и xq — синхронные индуктивные сопротивления по продольной и поперечной осям машины. Начальный пусковой момент у этих двигателей равен 0. Поэтому в них применяется асинхронный способ пуска, для чего используется короткозамкнутая обмотка на роторе. Реактивные двигатели проще по конструкции, дешевле и надежнее в эксплуатации, чем обычные синхронные машины с обмоткой возбуждения на роторе.
Основные недостатки двигателей: низкий cosφ и КПД, большие размеры, малая величина максимального момента. В двигателе мощностью несколько десятков ватт КПД составляет 0,3…0,4, а мощностью до 10 ватт — менее 0,2. Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
3. СД постоянными магнитами. По способу пуска эти двигатели делятся: на самозапускающиеся двигатели и двигатели с асинхронным пуском. Самозапускающиеся двигатели выполняются на небольшие мощности (обычно доли ватта) и низкие частоты вращения (не более 400 об/мин). Они рассчитываются на работу от однофазной сети переменного тока. Их магнитное поле либо пульсирует, либо имеет резко выраженный эллиптический характер. Пуск этих двигателей происходит за полпериода изменения тока за счет всегда существующего в синхронных двигателях пульсирующего момента. Нагрузка должна быть малоинерционной. В противном случае они пускаются в холостую а затем нагружаются. Для пуска используются различные устройства, обеспечивающие вращение двигателя в заданном направлении, например . клювообразные полюса статора -. КПД таких двигателей невелик – 3÷5 % и менее.
Синхронные микродвигатели с асинхронным пуском имеют на роторе короткозамкнутую обмотку типа «беличьей клетки», которая выполняется в полюсных наконечниках. Эта обмотка во время пуска участвует в создании асинхронного момента и разгоняет двигатель до скорости, близкой к синхронной. В синхронном режиме она демпфирует колебания ротора при резких изменениях нагрузки.
4. Пуск и вход в синхронизм СД.
Недостатком СД является то, что управление скоростью возможно только через изменение частоты вращения поля, а следовательно, частоты питающего напряжения. Недостатком СД является то, что двигатель должен войти в синхронизм, недостатком является также малый пусковой момент, поэтому, чтобы запустить двигатель, необходимы дополнительные меры. У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
Подавляющее большинство синхронных микродвигателей пускается как асинхронные, для чего они или снабжаются пусковой обмоткой или используется схема включения СД с асинхронным запуском. Рис. 93.
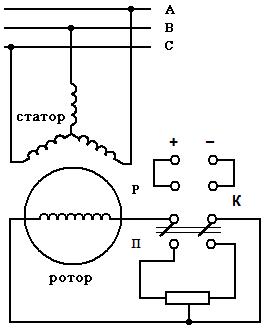
Рис. 93. Схема включения СД с асинхронным запуском
Здесь, на роторе находится обмотка, которая в момент запуска замыкается либо накоротко, либо на внешнее сопротивление. В этом случае двигатель ведет себя как асинхронный и у него есть значительный пусковой момент. Когда ротор разгоняется до скорости, близкой к скорости поля, ключ переключается в другое положение и на ротор подается постоянное напряжение. Такой СД при пуске асинхронно разгоняется до 90-95% от скорости поля, затем входит в синхронизацию и далее ведет себя, как синхронный. Есть другая модификация, у которой на роторе есть дополнительная короткозамкнутая обмотка, например, беличья клетка. Эти обмотки работают лишь при запуске. Когда частота вращения ротора приближается к частоте вращения поля, и двигатель вращается с синхронной скоростью, короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Процесс входа в синхронизм является сложным и ответственным моментом в работе синхронных микродвигателей. Ротор, достигший скорости близкой к синхронной должен за счет взаимодействия полей статора и ротора (в двигателе с постоянными магнитами) или упругих свойств линий поля (в синхронном реактивном двигателе) скачком втянуться в синхронизм. Поэтому момент входа в синхронизм в сильной степени зависит от момента инерции ротора и момента нагрузки.
8.2. Специальные синхронные двигатели
В автоматике используется СД малой мощности, от 0,1 до 500 Вт, Есть различные типы СД: редукторные, гистерезисные, бесконтактные, различные виды шаговых двигателей.
8.2.1. Гистерезисные двигатели
Гистерезисным двигателем называется синхронный двигатель, в котором вращающий момент создается за счет явления гистерезиса при перемагничивания ферромагнитного материала ротора. Статор гистерезисного двигателя подобен статору обычной машины переменного тока. Ротор представляет собой стальной цилиндр из ферромагнитного магнитотвердого материала (имеющего широкую петлю гистерезиса) без обмотки. С целью удешевления ротор делают сборным: кольцо из ферромагнитного материала и немагнитная или магнитомягкая втулка (рис.94).
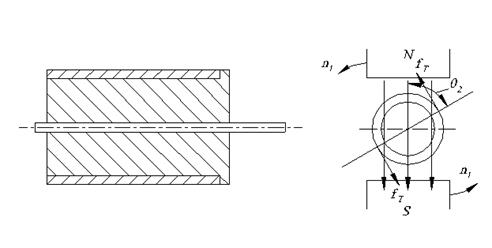
Рис. 94. Ротор гистерезисного двигателя и схема возникновения гистерезисного момента
В гистерезисном двигателе ротор, вращающийся с синхронной скоростью, представляет собой постоянный магнит. Так как ротор выполнен из магнита твердого материала, то элементарные магнитики перемагничиваются не мгновенно, а с отставанием из-за гистерезиса, это и создает гистерезисный момент. Ось магнита из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол θг гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fг сил взаимодействия между полюсами ротора и потоком статора. Величина силы fг и создаваемый ею момент не зависят от скорости вращения, а определяются шириной петли гистерезиса ферромагнитного материала.
Если нагрузочный момент больше Мг, то двигатель перейдет в асинхронный режим работы, т.е. появится дополнительный асинхронный момент Ма. Движущий момент ротора создается двумя составляющими: моментом вихревых токов и гистерезисным моментом. Рис. 95.
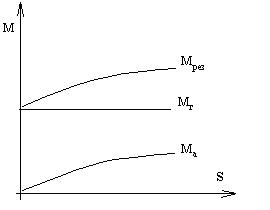
Рис. 95. Механическая характеристика гистерезисного двигателя
Асинхронный момент Ма есть результат взаимодействия вращающегося магнитного поля с вихревыми токами, которые индуктируются этим полем в сердечнике ротора. Т к. ротор имеет большое активное сопротивление, то характеристика Ма=f(s) практически линейна и асинхронный гистерезисный момент максимален при s=1.Рис. 95.
 ,
,
где П2Н — потери на перемагничивание ротора при неподвижном роторе; Пвихр.Н — потери на вихревые токи при неподвижном роторе;
Двигатель используется в приводах небольшой мощности до 2000 Вт, частота f=50, 400 и 500 Гц.
Достоинства гистерезисного двигателя: простота, надежность, плавность входа в синхронизм, значительный пусковой момент, бесшумность, малый пусковой ток, сравнительно высокий КПД (до 60%).
Недостатки: дороговизна, склонность к качаниям при резких изменениях нагрузки, значительный нагрев ротора.
8.2.2. Шаговые двигатели
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по числу фаз и типу магнитных системна ШД с активным ротором (с постоянными магнитами), ШД реактивного типа и индукторные.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
1. Шаговые двигатели с активным ротором. В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления. Ротор обычно представляет собой многополюсную звездочку из специального сплава. Есть варианты двух-, трех- и четырехфазных двигателей. Трехфазные двигатели имеют лучшие динамические характеристики и более равномерный ход. Управление ШД производится однополярными импульсами, поочередно подаваемыми на обмотки статора. Каждый импульс вызывает поворот ротора на единичный шаг.
Рассмотрим принцип действия простейшего двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. При включении фазы под постоянное напряжение (условно положительной полярности) вектор намагничивающей силы НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q — угол между осью ротора и вектором НС. Рис. 96.
Рис. 96. Принцип работы ШД
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 96, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90о(второй такт). При включении фазы А на напряжение обратной полярности (третий такт) НС и ротор повернутся еще на 90о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн = arcsin(Mн/Mmax).
В зависимости от типа электронного коммутатора управление ШД может быть:
- одноплярным или разнополярным;
- симметричным или несимметричным;
- потенциальным или импульсным.
При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. При отсутствии управляющего сигнала обмотка или группа обмоток находятся под напряжением, а положение ротора фиксируется полем обмоток. При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного оборота ротора n при разных способах коммутации может быть равно 1, 2, 4m, где m — число фаз: В многополюсных ШД число устойчивых положений возрастает пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному управляющему импульсу (угол между двумя соседними устойчивыми состояниями): a = 360/pn.
ШД с активным ротором удается выполнить с шагом до 15о. Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
2. Реактивные шаговые двигатели. Гораздо более мелкий шаг (до долей градуса) можно получить в реактивных редукторных ШД. Редукторные ШД выполняются с числом фаз m = 2 — 4. Они имеют ферромагнитный зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) рис.97. Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и у обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя. Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного шагового двигателя определится выражением: a = 360/Zp. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Индукторные (гибридные) шаговые двигатели. совмещают преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага).
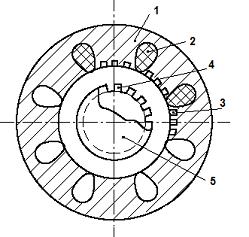
Рис. 96. Конструкция реактивного ШД
Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
3. Режимы работы ШД.
1. Статический режим – это режим, при котором ротор фиксируется в одной из позиций, а по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле.
2. Квазистатический режим – это режим отработки единичных шагов, при котором переходные процессы от предыдущего такта коммутации полностью затухли и скорость ротора в начале следующего шага равна нулю.
3. Установившийся режим – это режим, соответствующий постоянной частоте следования управляющих импульсов. При частоте управляющих импульсов f1, меньшей частоты собственны колебаний двигателя f0, движение ротора носит колебательный характер, что увеличивает динамическую ошибку при отработке заданного перемещения. При частоте управляющих импульсов f1 = f0/k, где k – целое число, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может привести к нарушению нормального движения ротора и выпадению его из синхронизма. При f1 > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты.
4. Переходный режим — это основной эксплуатационный режим работы ШД. Он включает в себя пуск, реверс, торможение, переход с одной управляющей частоты на другую. Основное требование к ШД в переходных режимах заключается в отсутствии потери шага, т.е. сохранение синхронизма при любом характере изменения управляющих импульсов.
Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы (рис.97). С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. Предельную механическую характеристику рассматривают обычно при f>f0.
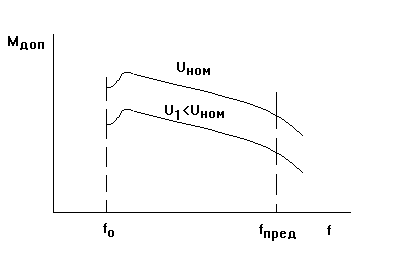
Рис. 97. Механические характеристики ШД
Максимальная частота управляющих импульсов, при которой возможен пуск без потери шага, называется частотой приемистости fпр. Частота приземистости является важным показателем переходного режима ШД Частота приемистости растет с увеличением максимального синхронизирующего момента, уменьшением шага, снижением постоянной времени обмоток, нагрузки и момента инерции. Для современных ШД fпр = 100-1000 Гц.
Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки. Такие характеристики называются предельными динамическими характеристиками пуска. Существуют также предельные динамические характеристики реверса и торможения
8.3. Бесконтактные двигатели переменного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 98):
- двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
- датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
- коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
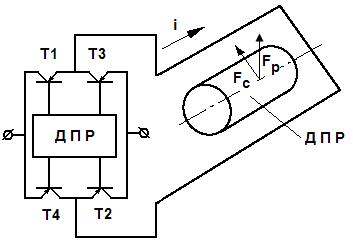
Рис. 98. Состав бесконтактного двигателя постоянного тока
Принцип действия подобен ДПТ:: при включении транзисторов Т1 и Т2 по обмотке статора потечет ток i в указанном направлении. В статоре возбудится магнитное поле, появится движущий момент, ротор повернется таким образом, чтобы векторы Fc и Fp совместились. Когда векторы совместятся, сигнал с ДПР закроет Т1 и Т2 и откроет Т3 и Т4. Ток в обмотке статора поменяет направление, движущий момент заставит ротор вращаться дальше и повернуться на 180°.
Для плавного хода число обмоток обычно 3 и выше. В этой схеме транзисторы и коммутатор работают в ключевом режиме. Транзисторами управляют схемы формирования Фа, Фб, Фс. На эти схемы подаются управляющие импульсы с датчика положения ротора. ДПР имеет и статор и ротор. На статоре имеются полюса, на которых поочередно располагаются обмотки управления а, б, с и обмотки возбуждения (5-30 кГц). Ротор ДПР имеет сектор из магнита мягкого материала. При повороте этот сектор замыкает два соседних полюса и в соответствующей обмотке управления наводится ЭДС, включается соответствующая статорная обмотка и роторы двигателя и ДПР поворачиваются на 120°. Затем сектор замыкает два следующих полюса, в результате роторы поворачиваются еще на 120° и т.д.
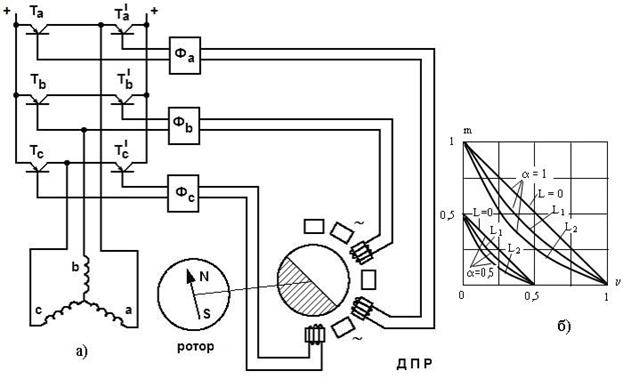
Рис. 99. Схема бесконтактного двигателя постоянного тока.(а) и его механические характеристики (б)
На рис. 99 показаны схема и механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
Синхронные электродвигатели. Работа и применение. Особенности
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Похожие темы:
Синхронный реактивный двигатель — Знаешь как
Содержание статьи
 Из всех типов синхронных двигателей малой мощности реактивный двигатель является самым распространенным. Он применяется в системах синхронной связи, в установках звукового кино, звукозаписывающих аппаратах (магнитофоны), в лентопротяжных механизмах магнитной памяти вычислительных устройств, в медицинской и бытовой аппаратуре — как приводной двигатель. Двигатель прост по конструкции и дешев.
Из всех типов синхронных двигателей малой мощности реактивный двигатель является самым распространенным. Он применяется в системах синхронной связи, в установках звукового кино, звукозаписывающих аппаратах (магнитофоны), в лентопротяжных механизмах магнитной памяти вычислительных устройств, в медицинской и бытовой аппаратуре — как приводной двигатель. Двигатель прост по конструкции и дешев.
Синхронный реактивный двигатель мало отличается от асинхронного с коротко-замкнутым ротором. На статоре имеются две обмотки, последовательно с одной из которых включен конденсатор (рис. 12-5) для получения вращающегося магнитного потока. Ротор — с короткозамкнутой обмоткой, но имеет на окружности осевые вырезы (рис. 12-12), благодаря чему образуются выступы, без которых двигатель в синхронном режиме работать не может. Принцип работы двигателя объясняется на рис. 12-13.
Рис. 12-11. Однофазный асинхронный двигатель с встроенным пусковым сопротивлением.
Четырехполюсный поток заменен условно полюсами магнитов. Если между ними поместить ротор в виде цилиндра, то он будет находиться в покое при любом положении.
Однако в том случае, когда он имеет выступы по числу полюсов, он будет в равновесии только в двух положениях: когда угол между осями полюсов и осями выступов равен нулю (ϴ = 0) или когда этот угол равен 90 эл. град (рис. 12-13, а и 12-13, б). Однако в последнем случае равновесие неустойчивое. При малейшем отклонении от него ротор возвращается в положение, соответствующее углу ϴ = 0, при котором магнитное сопротивление наименьшее. Если полюсы (поток) начнут вращаться (рис. 12-13, в) и появляется угол рассогласования 8, то ротор всегда будет вращаться синхронно с потоком (с полюсами), так как будет существовать усилие, стремящееся уме ньшить угол ϴ.
ньшить угол ϴ.
Рис. 12-12. Ротор однофазного синхронного реактивного двигателя.
Для того чтобы получилось указанное положение, ротор должен быть предварительно приведен во вращение со скоростью, близкой к синхронной. Поэтому ротор снабжен короткозамкнутой обмоткой и в начале двигатель работает, как асинхронный, а затем ротор втягивается в синхронизм. Ток в обмотке ротора становится равным нулю и двигатель вращается за счет реактивного момента между вращающимся потоком и выступами ротора. Эти двигатели в однофазном исполнении строятся на мощность до двух десятков ватт при п1 = 1 000 ÷ 1 500 об/мин. Недостатки этих двигателей — большой вес на единицу мощности, низкие к. п. д. и cos φ.

Рис. 12-13. Принцип работы однофазного синхронного реактивного двигателя.
ДВУХФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ С ФЕРРОМАГНИТНЫМ ПОЛЫМ ИЛИ МАССИВНЫМ РОТОРОМ
Этот двигатель имеет обычную двухфазную обмотку и ферромагнитный ротор в виде полого, или сплошного массивного цилиндра. Так как вращающийся магнитный поток замыкается через ферромагнитный ротор, то внутренний статор подобно показанному на рис. 12-6, отсутствует. Вращающийся поток наводит в поверхности ротора вихревые токи, которые совместно с потоком создают вращающий момент. Активное сопротивление ротора велико (r2 > х2), что обеспечивает большой пусковой момент, устойчивость работы двигателя на всем диапазоне работы и отсутствие самохода. Механические и регулировочные характеристики (рис 12-9 и 12-10) близки к прямолинейным и тем ближе, чем больше частота питающей сети. Скорость двигателя широко регулируется, а конструкция проста и надежна в эксплуатации. Недостаток двигателя — малые к. п. д. и cos φ. Двигатели широко применяются в схемах автоматики при мощности 5—300 вт и являются конденсаторными двигателями.
В тех устройствах, где стремятся увеличить момент инерции вращающихся частей (магнитофоны, гироскопы), указанные двигатели применяются в обращенном исполнении, когда обмотка статора помещается неподвижно на цилиндре, подобном показанному на рис. 12-7, а ротор в виде стального полого цилиндра вращается вокруг статора.
ОДНОФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ СО ВСТРОЕННЫМ ПУСКОВЫМ СОПРОТИВЛЕНИЕМ
Для пуска такого двигателя требовалось включение конденсатора, который даже при мощностях двигателя 50—200 вт должен иметь емкость 20—30 мкф. Размеры этого конденсатора обычно превышают размеры двигателя, что совершенно исключает их применение для многих схем автоматики.
Двигатель данного типа работает без конденсатора (рис. 12- 11) и устроен следующим образом. Статор двигателя, подобно показанному на рис. 10-31, имеет две обмотки. Рабочая обмотка 1 занимает дне трети пазов статора, имеет большое; число витков и обладает большим индуктивным сопротивлением. Пусковая обмотка 2 лежит в оставшейся части пазов и при малом числе витков имеет большое активное сопротивление по сравнению с индуктивным. Таким образом, по обмоткам, смещенным на 90 эл. град, протекают два тока, сдвинутые по фазе почти на четверть периода и образуют вращающийся магнитный поток, увлекающий ротор 3. Эти двигатели выгодно отличаются от трехфазных с пусковой емкостью по своим пусковым характеристикам и строятся при р = 1—2 на мощности 18—600 вт в закрытом обдуваемом исполнении.
ТРЕХФАЗНЫЙ И ОДНОФАЗНЫЙ СИНХРОННЫЕ ГИСТЕРЕЗИСНЫЕ ДВИГАТЕЛИ
Указанные выше недостатки реактивных синхронных двигателей заставляют при малых мощностях (3—20 вт) применять гистерезисные синхронные двигатели. Двигатель имеет трехфазную или однофазную (рабочую и пусковую) обмотку статора и массивный (или шихтованный) ферромагнитный ротор.

Однако если для электрических машин обычно применяется сталь с узкой петлей гистерезиса, то для ротора гистерезисного двигателя применяется магнитно-твердый материал — викеллой с широкой петлей гистерезиса. Для удешевления ротор делается сборным (рис. 12-14) и состоит из втулки 1, сидящей на валу 2, и наружного цилиндра 3 из магнитно-твердого материала.
Рис. 12-14. Ротор синхронного гистерезисного двигателя.
Если представить, что ротор помещен во вращающийся магнитный поток, который на рис: 12-15 заменен двумя полюсами то в его наружном цилиндре элементарные магнитики вследствие молекулярного трения не смогут мгновенно поворачиваться вслед за осью вращающегося потока. На эти магнитики будут действовать тангенциальные силы FT и создавать гистерезисный момент Мг.

Рис. 12-15. Принцип работы синхронного гистерезисного двигателя.
Ротор будет увлекаться с синхронной скоростью вслед за потоком. Между осью вращающегося потока и осью элементарных магнитиков образуется угол рассогласования ϴ, который зависит только от коэрцитивной силы материала.
При пуске двигателя результирующий момент состоит из суммы: гистерезисного момента и момента, создаваемого вихревыми токами Мв. Поэтому пусковой момент значителен. В нормальном режиме двигатель вращается синхронно за счет гистерезисного момента, так как при синхронной скорости вихревые токи в роторе отсутствуют.
Статья на тему Синхронный реактивный двигатель
Система синхронизации перемещения гидравлических цилиндров
Изобретение относится к области машиностроения и может быть использовано при конструировании двухцилиндровых или четырехцилиндровых гидравлических быстроходных прессов с золотниковыми распределителями. Технический результат — повышение точности и надежности синхронизации перемещения цилиндров. В систему синхронизации, содержащую дросселирующий распределитель, шаговый двигатель, блок управления, импульсные датчики перемещения, дополнительно введен шаговый двигатель с блоком управления от соответствующего датчика перемещения. Причем вал шагового двигателя связан с золотником дросселирующего распределителя шлицевым подвижным соединением, а вал первого шагового двигателя связан с золотником винтовой передачей. Система синхронизации может быть применена в вырубных прессах для неметаллических материалов и позволит за счет повышения точности повысить качество вырубаемых изделий, стойкость инструмента и вырубных плит. 1 ил.
Изобретение относится к области машиностроения и может использовано при конструировании двухцилиндровых или четырехцилиндровых гидравлических быстроходных прессов с золотниковыми распределителями.
Известна система (1) синхронизации движения цилиндров гидравлического пресса для вырубки деталей низа обуви, созданного на основе пресса ПВГ-18-2-О, с числом ходов до 60 в минуту, содержащая дросселирующий распределитель, золотник которого через передаточный механизм соединен с шаговым двигателем, импульсные датчики перемещения и блок управления шаговым двигателем, показавшая при испытаниях перекос траверсы 0,3 мм при допустимом значении для подобных прессов 0,8 мм. Недостатком такой системы является наличие дополнительного звена синхронизации — дозатора возвратно-поступательного движения, сложность и трудоемкость его изготовления, а также сложность соединения вала шагового двигателя с золотником, что снижает точность и надежность синхронизации. Заявляемое изобретение решает задачу повышения точности и надежности синхронизации перемещения цилиндров за счет устранения недопустимого перекоса, вызванного сжимаемостью жидкости в ветвях дозатора, а также упрощает систему управления благодаря устранению необходимости в дополнительных устройствах для обеспечения реверсивной работы шагового двигателя. Это достигается тем, что в систему синхронизации перемещения гидравлических цилиндров, содержащую насос, соединенный через дросселирующий распределитель с гидравлическими цилиндрами, шаговый двигатель, соединенный механически с дросселирующим распределителем и электрически — с блоком управления, два импульсных датчика перемещения, введен дополнительный шаговый двигатель, электрически соединенный со вторым блоком управления, причем каждый из импульсных датчиков перемещения соединен со входом одного из блоков управления, вал первого шагового двигателя соединен с золотником дросселирующего распределителя винтовой передачей, а вал второго шагового двигателя соединен с золотником дросселирующего распределителя шлицевым подвижным соединением. Сущность изобретения поясняется чертежом, на котором изображена принципиальная схема пресса и система синхронизации перемещения гидравлических цилиндров. Система синхронизации состоит из дросселирующего распределителя 12, золотник которого с одной стороны через механизм винт — гайка 6 соединен с валом шагового двигателя (ШД) 10, а с другой стороны шлицевым соединением 7 связан с валом шагового двигателя 11. По краям станины 3 установлены импульсные датчики перемещения 4 и 5, подающие импульсы при перемещении траверсы на блоки управления 8 и 9 соответствующим шаговым двигателем 10 и 11. Блоки управления ШД имеют прямой и реверсивный входы и обеспечивают направление вращения вала в зависимости от того, на какой вход подают импульсы от датчиков. Система синхронизации работает следующим образом. При рабочем ходе распределитель 13 переключают в левое положение. Жидкость из бака 15 насосом 14 через распределитель 13 и дросселирующий распределитель 12 подается в штоковые полости гидроцилиндров 2. Траверса 1 совершает рабочий ход вниз. Если осуществляется бесперекосное движение траверсы, то количество импульсов, поступающих с датчиков 4 и 5 на блоки управления 8 и 9 каждого ШД, совпадает. Соответственно будут равны и углы поворота валов шаговых двигателей 10 и 11, и, следовательно, золотник распределителя 12 останется в нейтральном положении, пропуская в цилиндры 2 равное количество рабочей жидкости. В случае перекоса траверсы 1 относительно станины пресса 3, например, при повороте по часовой стрелке, с датчика 5 на блок управления 9 ШД 11 поступает большее количество импульсов, чем на блок управления 8 ШД 10. Соответственно вал ШД 11 повернется на больший угол, чем вал ШД 10. Направление вращения шаговых двигателей, а также направление резьбы в паре винт — гайка 6 выбираются такими, что в этом случае произойдет смещение золотника относительно нейтрального положения вправо. Величина смещения будет пропорциональна перекосу траверсы 1. Следовательно, подача жидкости в опережающий цилиндр уменьшается, а в отстающий цилиндр увеличится. Это повлечет уменьшение перекоса и выравнивание траверсы. При перекосе траверсы 1 в другую сторону система работает аналогично. Предлагаемая система синхронизации может быть применена в вырубных прессах для неметаллических материалов и позволит за счет повышения точности повысить качество вырубаемых изделий, стойкость инструмента и вырубных плит. Источники информации 1. Петров Н.В., Соков О.А., Семенихин В.Ф., Третьяков В.В. Система синхронизации движения цилиндров гидравлического пресса для вырубки деталей низа обуви // Кожевенно-обувная промышленность. — N 8 — 1988. — С. 63-65.Формула изобретения
Система синхронизации перемещения гидравлических цилиндров, содержащая насос, соединенный через дросселирующий распределитель с гидравлическими цилиндрами, шаговый двигатель, соединенный механически с дросселирующим распределителем и электрически — с блоком управления, два импульсных датчика перемещения, отличающаяся тем, что она снабжена вторым шаговым двигателем, электрически соединенным со вторым блоком управления, причем каждый из импульсных датчиков перемещения соединен со входом одного из блоков управления, вал первого шагового двигателя соединен с золотником дросселирующего распределителя винтовой передачей, а вал второго шагового двигателя соединен с золотником дросселирующего распределителя шлицевым подвижным соединением.РИСУНКИ
Рисунок 1