


Электрические машины переменного тока
Машины переменного тока подразделяются на синхронные и асинхронные. Асинхронные машины используются в основном, как двигатели. В режиме торможения они работают как генераторы. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели преимущественно применяются в качестве привода мощных производственных машин.
Асинхронная машина– такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотойf1, поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростьюn2отличающейся от скорости вращения магнитного поляn
Неподвижная часть машины – статор, состоит из стального сердечника и расположенных на нем трех обмоток, оси которых сдвинуты на угол 120°одна относительно другой. Обмотки подключены к источнику трехфазного тока. Сердечник статора имеет форму полого цилиндра, вдоль внутренней поверхности которого, сделаны пазы. В диаметрально противоположных пазах статора уложены обмотки трех катушек. Если катушки статора соединить между собой в звезду или треугольник, то симметричная трехфазная цепь питания создает в магнитной системе машины вращающееся магнитное поле.
Ротор, представляет собой цилиндрический сердечник, в диаметрально противоположных пазах которого, уложены короткозамкнутые витки. При вращении магнитного поля токов статора со скоростьюn1, в проводниках ротора наводится ЭДС. Под действием ЭДС в короткозамкнутых витках ротора протекает ток, взаимодействующий с вращающимся магнитным полем. Это взаимодействие проявляется в возникновении электромагнитных сил, действующих на ротор. Если электромагнитные силы, действующие на неподвижный ротор, превышают тормозной момент на его валу, то он получает ускоренное движение в направлении вращения магнитного поля. По мере возрастания скорости вращения ротора относительная скорость движения его проводников в равномерно вращающемся поле уменьшается, вследствие чего уменьшается и величина тока в них. Процесс изменения тока и скорости вращения ротора прекратится, как только наступит устойчивое равновесие между моментом электромагнитных сил, вызывающих вращение ротора, и тормозным моментом, создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью, отличной от скорости вращения поля.
Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора.
Одной из важнейших величин, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимают отношение:
где:
 – частота вращения ротора;
– частота вращения ротора;

 – число пар полюсов двигателя.
– число пар полюсов двигателя.
Для большинства современных типов асинхронных двигателей скольжение ротора при номинальной нагрузке заключено в пределах 2 – 6%.
При отсутствии нагрузки, когда двигатель работает вхолостую, и вращению ротора препятствуют лишь незначительные силы трения, скольжение очень мало и не превосходит десятых долей процента. С увеличением нагрузки скорость вращения ротора уменьшается, а скольжение и вращательный момент соответственно увеличиваются.
Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора двигателя можно рассматривать как первичную обмотку трансформатора, а обмотку ротора — как вторичную. Особенностью двигателя по сравнению с трансформатором является то, что в его статорной и роторной обмотках действуют ЭДС и токи разных частот.
Величины этих ЭДС определяются по формулам:
 ;
;
 ,
,
где:
 – ЭДС обмотки статора,
– ЭДС обмотки статора,
 – ЭДС обмотки неподвижного ротора,
– ЭДС обмотки неподвижного ротора,
 и
и – соответственно обмоточные коэффициенты
обмоток статора и ротора,
– соответственно обмоточные коэффициенты
обмоток статора и ротора,
 и
и – число обмоток статора и ротора,
– число обмоток статора и ротора,
 – основной магнитный поток,
– основной магнитный поток,
 – частота тока цепи обмоток статора,
– частота тока цепи обмоток статора,
 – частота ЭДС ротора. Из этого соотношения
следует, что частота ЭДС ротора
пропорциональна скольжению.
– частота ЭДС ротора. Из этого соотношения
следует, что частота ЭДС ротора
пропорциональна скольжению.
При неподвижном роторе  ,
т.е частота тока и ЭДС ротора равна
частоте ЭДС и тока статора и равна
частоте питающего напряжения. Векторная
диаграмма в этом режиме, называемым
холостым ходом, аналогична соответствующей
векторной диаграмме трансформатора.
,
т.е частота тока и ЭДС ротора равна
частоте ЭДС и тока статора и равна
частоте питающего напряжения. Векторная
диаграмма в этом режиме, называемым
холостым ходом, аналогична соответствующей
векторной диаграмме трансформатора.
ЭДС во вращающемся роторе 
Индуктивное сопротивление вращающегося ротора:

Активное сопротивление ротора  не зависит от частоты.
не зависит от частоты.
По закону Ома ток в роторе равен:
Электрическая мощность, подведенная к
двигателю из сети 
 и на нагрев обмотки статора
и на нагрев обмотки статора .
Остальная мощность электромагнитным
путем передается на ротор и называется
электромагнитной мощностью
.
Остальная мощность электромагнитным
путем передается на ротор и называется
электромагнитной мощностью .
Часть мощности, переданной на ротор,
тратится на нагрев меди обмоток ротора
.
Часть мощности, переданной на ротор,
тратится на нагрев меди обмоток ротора
 .
Остальная часть мощности называется
полной механической мощностью
.
Остальная часть мощности называется
полной механической мощностью  .
Если из полной механической мощности
вычесть механические потери
.
Если из полной механической мощности
вычесть механические потери  и
добавочные потери
и
добавочные потери  то получится полезная мощность на валу
двигателя
то получится полезная мощность на валу
двигателя .
.КПД асинхронного двигателя:
 ,
,
где  .
.
Величина КПД асинхронных двигателей составляет от 0,7 до 0,9 и выше.
Механическая мощность ротора:
 ,
,
где  – вращающий момент двигателя.
– вращающий момент двигателя.
Электромагнитная мощность вращающегося магнитного поля:
Основные режимы работы асинхронного двигателя:
пуск двигателя в ход,
холостой ход двигателя,
рабочий режим двигателя.
Рабочий режим двигателя при номинальной
нагрузке характеризуется номинальными
параметрами различными для каждого
асинхронного двигателя. Основным
номинальным параметром асинхронного
двигателя является его номинальная
мощность  .
Это мощность выражается в киловаттах
и соответствует той наибольшей
механической мощности на валу двигателя,
которая может быть полезно отдана
механизму, приводимого двигателем во
вращение. Работа двигателя с нагрузкой
превышающей его номинальную мощность,
рассматривается как перегрузка и потому
длительно не допустима.
.
Это мощность выражается в киловаттах
и соответствует той наибольшей
механической мощности на валу двигателя,
которая может быть полезно отдана
механизму, приводимого двигателем во
вращение. Работа двигателя с нагрузкой
превышающей его номинальную мощность,
рассматривается как перегрузка и потому
длительно не допустима.
Вторым параметром двигателя является
его номинальная скорость вращения  .
.
Важным электрическим параметром является
напряжение, для которого предназначен
двигатель  .
Номинальный ток двигателя устанавливается,
исходя из номинальной мощности двигателя
и номинального напряжения. К номинальным
параметрам относят также номинальный
коэффициент мощности двигателя.
.
Номинальный ток двигателя устанавливается,
исходя из номинальной мощности двигателя
и номинального напряжения. К номинальным
параметрам относят также номинальный
коэффициент мощности двигателя.
Номинальный момент  часто вычисляют по упрощенной формуле,
учитывая номинальные значения величин:
часто вычисляют по упрощенной формуле,
учитывая номинальные значения величин:
 (кГм.) или(Н·м.)
(кГм.) или(Н·м.)
Для расчета зависимости вращающего момента асинхронного двигателя от скольжения с достаточной точностью применяется упрощенная формула:
 ,
,
где:  – максимальный вращающий момент,
– максимальный вращающий момент,
 – критическое скольжение, при котором
вращающий момент достигает своего
максимального значения, его величина
зависит от активного сопротивления
цепи ротора. При известном номинальном
скольжении критическое определяется
по формуле:
– критическое скольжение, при котором
вращающий момент достигает своего
максимального значения, его величина
зависит от активного сопротивления
цепи ротора. При известном номинальном
скольжении критическое определяется
по формуле:
Зависимость вращающего момента от его
скольжения или, от скорости вращения
ротора называют механической
характеристикой двигателя.  ,
при
,
при ,
, .
.
Для оценки рабочих свойств двигателя
пользуются его рабочими характеристиками.
Рабочими характеристиками асинхронного
двигателя называют кривые, характеризующие
зависимость электромагнитного момента  ,
тока статора
,
тока статора ,
КПД
,
КПД ,
и коэффициента мощности на валу
,
и коэффициента мощности на валу от полезной мощности
от полезной мощности на валу при неизменном напряжении и
частоте питающего напряжения
на валу при неизменном напряжении и
частоте питающего напряжения ,
, .
.
В зависимости от конструктивного выполнения роторной обмотки трехфазные асинхронные двигатели разделяются на два типа:
При пуске двигателя с короткозамкнутым
ротором скорость вращения ротора в
первый момент  ,
чему соответствует максимальное
скольжение
,
чему соответствует максимальное
скольжение ,
двигатель находится в режиме короткого
замыкания. Ток в роторе имеет наибольшее
значение и наибольший сдвиг фаз по
отношению к ЭДС. При этом пусковой ток
статора в 4 – 10 раз больше номинального.
Пусковой момент составляет 0,9 – 1,8 от
номинального момента. По мере разгона
двигателя величина пускового тока
быстро уменьшается. Большая величина
пускового тока вызывает резкие колебания
напряжения в сети, что плохо отражается
на работе других потребителей. При
включении двигателей в мощные энергосистемы
эти колебания нивелируются, поэтому
используется прямой пуск — включением
обмотки статора на полное напряжение
цепи. Для уменьшения пускового тока
асинхронных двигателей с короткозамкнутым
ротором применяют способы, позволяющие
понизить на время пуска напряжение,
подводимое к статору: переключение
обмотки статора со звезды на треугольник,
запуск двигателя через автотрансформатор,
включение дополнительного сопротивления
в обмотку статора. При запуске двигателя
через автотрансформатор уменьшение
пускового тока в цепи произойдет враз, где
,
двигатель находится в режиме короткого
замыкания. Ток в роторе имеет наибольшее
значение и наибольший сдвиг фаз по
отношению к ЭДС. При этом пусковой ток
статора в 4 – 10 раз больше номинального.
Пусковой момент составляет 0,9 – 1,8 от
номинального момента. По мере разгона
двигателя величина пускового тока
быстро уменьшается. Большая величина
пускового тока вызывает резкие колебания
напряжения в сети, что плохо отражается
на работе других потребителей. При
включении двигателей в мощные энергосистемы
эти колебания нивелируются, поэтому
используется прямой пуск — включением
обмотки статора на полное напряжение
цепи. Для уменьшения пускового тока
асинхронных двигателей с короткозамкнутым
ротором применяют способы, позволяющие
понизить на время пуска напряжение,
подводимое к статору: переключение
обмотки статора со звезды на треугольник,
запуск двигателя через автотрансформатор,
включение дополнительного сопротивления
в обмотку статора. При запуске двигателя
через автотрансформатор уменьшение
пускового тока в цепи произойдет враз, где —
коэффициент трансформации автотрансформатора.
Однако недостатком этих способов
является уменьшение пускового момента,
величина которого пропорциональна
квадрату напряжения сети:
—
коэффициент трансформации автотрансформатора.
Однако недостатком этих способов
является уменьшение пускового момента,
величина которого пропорциональна
квадрату напряжения сети: .
.
Асинхронный двигатель с фазным ротором пускается в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора.
Пусковые качества двигателей
характеризуются коэффициентами кратности
пускового тока  и пускового момента
и пускового момента .
.
Частота вращения двигателя регулируется изменением частоты вращения магнитного поля (частоты питающего напряжения), переключением пар полюсов, изменением активного сопротивление фазного ротора с помощью трехфазного реостата, включаемого так же как пусковой.
В синхронном двигателе частота
вращения двигателя равна частоте
вращения магнитного поля: .
.
Основными характеристиками синхронного двигателя являются угловая, механическая и регулировочная. Угловая характеристика определяет зависимость вращающего момента от угла между ЭДС и напряжением:
где:
 – угол между векторами ЭДС и напряжения,
т.е.
– угол между векторами ЭДС и напряжения,
т.е. ,
,
 – полное индуктивное сопротивление
двигателя.
– полное индуктивное сопротивление
двигателя.
На специальных электростанциях, покрывающих пиковые нагрузки в энергосистемах, синхронная машина работает генератором в часы максимума нагрузки и двигателем – в остальное время, перекачивая с помощью гидротурбины, которая теперь становится насосом, воду в водохранилище, создавая необходимый запас её для последующей работы. Такие агрегаты называют обратимыми.
Синхронная машина состоит из двух частей: неподвижной части – статора и вращающейся части – ротора и имеет две обмотки. Одна обмотка подключается к источнику постоянного тока и создает основное магнитное поле машины. Это обмотка возбуждения. Другая обмотка является обмоткой якоря и состоит из одной, двух или трех фаз. В обмотке якоря индуцируется основная ЭДС машины. В синхронных машинах наибольшее распространение получила конструкция, когда обмотка якоря располагается на статоре, а обмотка возбуждения – на роторе.
Особенностью синхронных машин является то, что ротор должен быть раскручен к моменту присоединения машины к сети переменного тока. При этом должны выполнятся следующие условия: переменный ток, протекающий через обмотку статора, должен быть таким, чтобы его взаимодействие с магнитным полем постоянного тока создавало силу требуемого направления, иначе, вместо того чтобы поддерживать вращение, электромагнитное взаимодействие будет ему препятствовать.
Синхронные машины должны вращаться со строго определенной скоростью. Уменьшение скорости хотя бы на 1% приводит к тому, что изменения тока в обмотке переменного тока перестают соответствовать изменениям в положении обмотки постоянного тока, они как бы выпадают из такта, машина выпадает из синхронизма: обмотка постоянного тока подвергается усилиям, направленным то в одну, то в другую сторону, и машина останавливается.
Постоянный ток, создающий магнитное поле в синхронной машине, называют током возбуждения. Чем больше ток возбуждения, тем больше напряжение, наводимое в машине.
Пример.Определить мощность, подводимую к
трехфазному асинхронному двигателю с
фазным ротором, а также ток в обмотках
статора при их соединении звездой и
треугольником. Номинальные параметры
двигателя: полезная мощность на валу кВт, напряжение на статоре
кВт, напряжение на статоре В,
В, %,
%, 0,85.
0,85.
Решение.Активная мощность, потребляемая двигателем, равна:
 кВт.
кВт.
полная мощность:
 кВ·А.
кВ·А.
При соединении обмоток звездой:
 А,
А,
при соединении треугольником:
 А.
А.
Пример.Для привода лифта использован трехфазный
асинхронный электродвигатель с
короткозамкнутым ротором, питающийся
от трехфазной сети с частотой напряжения Гц (рис.6.15), с числом пар полюсов
Гц (рис.6.15), с числом пар полюсов и частотой вращения ротора
и частотой вращения ротора .
Определить частоту вращения
.
Определить частоту вращения и
и вращающегося магнитного поля, скольжение
вращающегося магнитного поля, скольжение ротора, частоту
ротора, частоту тока в роторе при пуске и в рабочем
режиме
тока в роторе при пуске и в рабочем
режиме ,
а также частоту вращения ротора
,
а также частоту вращения ротора ,
частоту тока
,
частоту тока в роторе при возрастании нагрузки на
валу двигателя, с учетом того, что частота
вращения ротора
в роторе при возрастании нагрузки на
валу двигателя, с учетом того, что частота
вращения ротора при этом уменьшилась на 5% и составляет
при этом уменьшилась на 5% и составляет .
.
Рис.6.15. Трехфазный асинхронный электродвигатель с короткозамкнутым ротором, питающийся от трехфазной сети.
Решение.Частота вращения магнитного
поля (синхронная частота вращения) при
числе пар полюсов :
:
 об/мин.
об/мин.
Угловая частота вращения магнитного поля:
 рад/с.
рад/с.
Скольжение ротора двигателя:
 .
.
Частота вращения ротора двигателя:
 об/мин,
об/мин,  .
.
Частота тока в роторе двигателя при
пуске  :
:
 Гц.
Гц.
Частота тока ротора при частоте вращения двигателя:
 Гц.
Гц.
Частота вращения ротора при возросшей нагрузке на валу двигателя:
 об/мин.
об/мин.
Скольжение ротора при возросшей нагрузке:
 .
.
Частота тока ротора при возросшей нагрузке:
 Гц.
Гц.
Пример.Для пуска восьмиполюсного асинхронного
двигателя с фазным ротором и номинальными
параметрами: об/мин;
об/мин; и
и Ом
используется пусковой реостат. Определить
сопротивление
Ом
используется пусковой реостат. Определить
сопротивление фазы пускового реостата, чтобы при пуске
двигатель развивал максимальный момент,
если частота напряжения сети
фазы пускового реостата, чтобы при пуске
двигатель развивал максимальный момент,
если частота напряжения сети Гц.
Гц.
Решение.Номинальное скольжение определяется по формулам:
 ,
, ,
,
согласно которым
 об/мин
об/мин
и  .
.
Критическое скольжение равно:
 .
.
Пусковое сопротивление определяется из соотношения:
 ,
,
отсюда:
 Ом.
Ом.
Пример.Асинхронный двигатель с короткозамкнутым
ротором имеет следующие паспортные
данные: В,
В, кВт,
кВт, об/мин,
об/мин, %,
%, .
Кратность пускового тока
.
Кратность пускового тока ,
частота напряжения питания
,
частота напряжения питания Гц.
Определить число пар полюсов, номинальный
и пусковой токи двигателя при соединении
обмоток статора в треугольник и звезду.
Гц.
Определить число пар полюсов, номинальный
и пусковой токи двигателя при соединении
обмоток статора в треугольник и звезду.
Решение.Ближайшая стандартная
синхронная частота об/мин,
следовательно, число пар полюсов
об/мин,
следовательно, число пар полюсов ,
т.е. машина шестиполюсная.
,
т.е. машина шестиполюсная.
Скольжение равно:
 ,
,
мощность, потребления двигателя:
 кВт,
кВт,
номинальный момент:
 Н·м.
Н·м.
При соединении обмоток треугольником номинальный ток:
 А,
А,
пусковой ток:
 А.
А.
При соединении обмоток звездой:
 А,
А,
пусковой ток:
 А,
А,
т.е. пусковой ток в этом случае в  раз меньше.
раз меньше.
Пример.Синхронный шестиполюсный двигатель
имеет следующие номинальные данные: кВт,
кВт, об/мин,
об/мин, В,
В, А,
А, Ом.
Определить номинальный и максимальный
моменты двигателя, если ЭДС двигателя
равна 670 В. Построить угловую
характеристику двигателя.
Ом.
Определить номинальный и максимальный
моменты двигателя, если ЭДС двигателя
равна 670 В. Построить угловую
характеристику двигателя.
Решение.Номинальный момент определяется по формуле:
 .
.
Максимальный момент при  равен:
равен:
 .
.
Подставляя исходные данные, получаем:
 .
.
Исходная зависимость для угловой
характеристики имеет вид  .
Например, при номинальном моменте
.
Например, при номинальном моменте и
и .
.
7.1.3. Классификация синхронных машин
Синхронные машины классифицируются по следующим признакам:
а) по назначению — синхронные генераторы, синхронные двигатели, синхронные компенсаторы;
б) по числу фазных обмоток на статоре — однофазные, трехфазные, многофазные;
в) по конструкции ротора — явнополюсные, неявнополюсные;
г) по способу возбуждения – с независимым возбуждением, с самовозбуждением, с контактными кольцами и бесщеточные;
д) по типу первичного двигателя — турбогенераторы, гидрогенераторы, дизель-генераторы;
е) по номинальным данным — мощность, частота, скорость вращения, напряжение;
ж) по способу охлаждения – с воздушным, с газовым (водород, гелий), с водяным, криогенные.
В последующем изложении мы будем иметь в виду трехфазные СМ (с указанием назначения), явнополюсные и неявнополюсные (с указанием на это при необходимости) и безотносительно к остальным классификационным признакам.
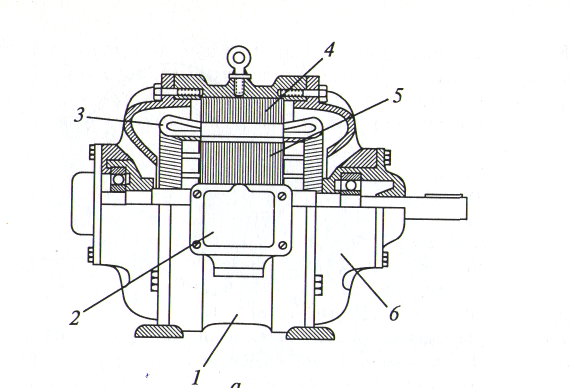
7.1.4. Устройство синхронных машин
Конструктивно синхронная машина, подобно другим электрическим машинам, состоит из двух частей – якоря, несущего обмотку, и индуктора, на котором располагаются полюсы для создания магнитного поля возбуждения. В обмотке якоря индуктируется ЭДС и протекает ток нагрузки, то есть именно в этой части происходит преобразование энергии. В общем случае неподвижная часть машины переменного тока называется статором, а вращающаяся часть – ротором. Каждая из этих двух основных частей содержит по нескольку конструктивных элементов.
На рисунке 7.1 показано устройство судового СГ серии МСС с обозначением основных элементов. Корпус вместе с торцевыми щитами является несущей конструкцией для всех частей машины. Корпус судового синхронного генератора выполняется брызгонепроницаемым или брызгозащищенным. К корпусу крепятся воздуховоды для подвода и отвода охлаждающего воздуха. Для машин морского исполнения корпус, подшипниковые щиты или стояки выполняются стальными. В случае применения подшипников качения подшипниковые щиты и корпусы подшипников исполняются разъемными, что допускает промывку подшипников и замену консистентной смазки без съема подшипников с вала и разборки машины. Все внешние кабели подводятся к выводным зажимам через сальники.
Сердечник статора закрепляется в корпусе машины и служит магнитопроводом для основного магнитного потока. Сердечник набирается из отдельных листов электротехнической стали, имеющих на внутренней окружности пазы. Эти листы штампуются из листов толщиной 0,5 мм и покрываются с обеих сторон изоляционным лаком.
Т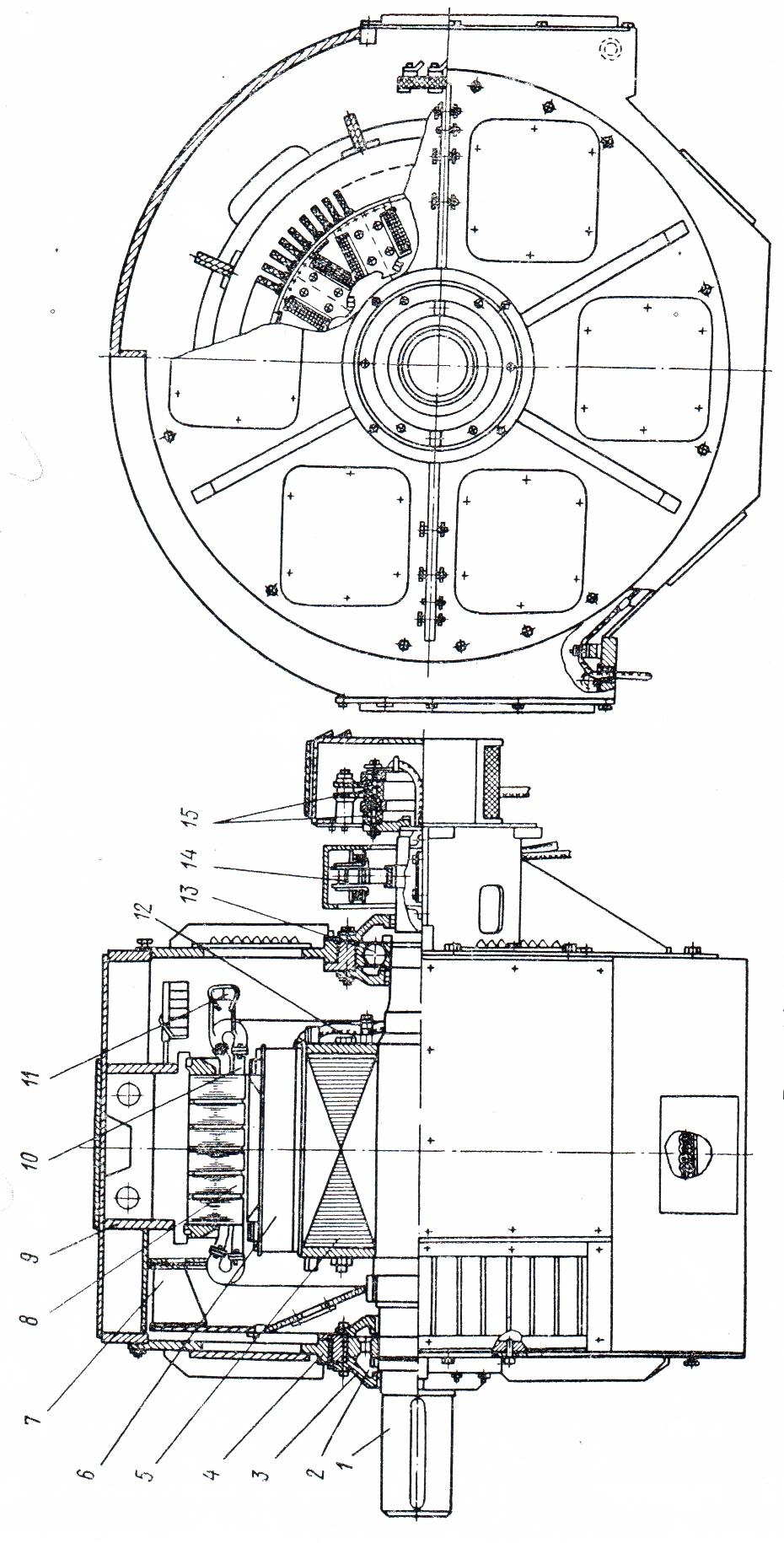
 акая
конструкция сердечника необходима для
уменьшения потерь от вихревых токов,
индуктируемых переменным (вращающимся)
магнитным полем.
акая
конструкция сердечника необходима для
уменьшения потерь от вихревых токов,
индуктируемых переменным (вращающимся)
магнитным полем.
В пазы сердечника укладывается трехфазная обмотка, которая в современных машинах выполняется двухслойной. Обмотка целиком пропитывается специальным лаком и просушивается в печах при определенных температурах, что повышает электрическую прочность, теплопроводность, изоляции и уменьшает ее гигроскопичность, а также скрепляет элементы изоляции, повышая ее механическую прочность. В крупных машинах пропитываются отдельные стержни обмотки. Для этой же цели применяется пропитка компаундами, причем ввиду отсутствия в них летучих растворителей заполнение пор изоляции при компаундировании получается более совершенным. Поверхность изоляции обмоток покрывается изоляционными эмалями
Как отмечалось в главе 5 по конструкции ротора в зависимости от скорости вращения синхронные машины разделяются на два основных типа: явнополюсные, т. е. машины с явно выраженными полюсами, и неявнополюсные. Если машина имеет одну пару полюсов р = 1, то для получения стандартной частоты f= 50 гц скорость вращения ротора должна быть 3000 об/мин. При такой скорости вращения машин большой мощности с большим диаметром ротора окружная скорость на поверхности ротора достигает в судовых турбогенераторах 90…100 м/сек, а стационарных 160 м/сек. Развивающиеся при этих скоростях центробежные силы создают в отдельных частях ротора весьма большие механические напряжения, поэтому изготовление для таких скоростей явнополюсных роторов с достаточной механической прочностью невозможно. Для таких скоростей применяются неявнополюсные роторы, изготовленные из цельной цилиндрической стальной поковки высокой прочности, в которой для снятия внутренних напряжений и контроля качества по всей длине ротора просверливают центральное отверстие.
На цилиндрической поверхности такого ротора в радиальном направлении фрезеруются пазы, в которые укладывается обмотка возбуждения и закрепляется в пазах при помощи металлических клиньев, изготовляемых из немагнитных сплавов.
Лобовые части обмотки ротора, на которые также воздействуют большие центробежные силы, крепятся стальными массивными бандажами.
Обмотка возбуждения распределяется не по всей окружности цилиндрического ротора, примерно третья часть окружности остается свободной от пазов, образуя так называемый большой зуб. Такое расположение обмотки возбуждения обусловливает практически синусоидальное распределение магнитного поля ротора, и вследствие этого достигается синусоидальное изменение во времени ЭДС обмотки статора.
Явнополюсные машины проще в изготовлении, поэтому при числе пар полюсов р ≥ 2 синхронные машины стремятся выполнять с явнополюсным ротором. Полюс у роторов, как правило, набирается из отдельных штампованных листов конструкционной стали толщиной 1…2 мм. Листы стягиваются в пакет шпильками. Полюсы крепятся к остову ротора Т-образными хвостами и клиньями. Очертание полюсного башмака обеспечивает синусоидальное распределение МДС ротора (см.главу 5).
Обмотка возбуждения явнополюсных роторов выполняется в виде цилиндрических катушек прямоугольного сечения. Катушки обмотки возбуждения размещены на сердечниках полюсов и укреплены полюсными наконечниками. В машинах большой мощности катушки наматываются из полосовой меди на ребро, отдельные витки обмотки изолируются друг от друга. Мощность, необходимая для возбуждения генератора, составляет обычно 3…5% от его номинальной мощности.
Питание обмотки возбуждения может осуществляться от любого источника постоянного тока, обычно для этой цели используются генераторы постоянного тока малой мощности, которые размешаются на одном валу с синхронным генератором.
В настоящее время широкое применение находят генераторы с самовозбуждением серий МСС, МСК, БСГ, у которых обмотка возбуждения питается от обмотки статора через полупроводниковые выпрямители. Явнополюсные роторы кроме обмоток возбуждения имеют, как правило, успокоительную (демпферную) обмотку, назначением которой является гашение колебаний ротора при переходных процессах и при режимах несимметричной нагрузки генератора. Успокоительная обмотка выполняется из медных стержней, которые закладываются в пазы полюсных наконечников и по торцам замкнуты кольцами, в результате чего получается короткозамкнутая обмотка в виде «беличьей клетки».
В неявнополюсных машинах функции успокоительной обмотки наполняет массивный сердечник ротора и массивные бандажи на лобовых частях обмотки возбуждения.
К другим важным элементам конструкции СМ относятся:
— подшипниковые щиты, которые присоединяются к торцам станины на болтах и служат для размещения подшипников, и в которых
вращается вал ротора;
— щеточное устройство, необходимое для обеспечения подвода постоянного тока к вращающейся обмотке возбуждения, уложенной на роторе;
— клеммная коробка, в которой размещены шесть выводов от трех фаз обмотки статора (они обозначены: С1 — С4, С2 — С5, С3— С6) и два вывода обмотки ротора (обозначены р1, р2), в ней осуществляется соответствующее соединение фазных обмоток и соединение СМ с внешними сетями переменного и постоянного тока.
Электрическая машина — Википедия
Электрическая машина — электромеханический преобразователь физической энергии[1], основанный на явлениях электромагнитной индукции и силы Ампера, действующей на проводник с током, движущийся в магнитном поле.
Возможность создания электрической машины как электромеханического преобразователя базируется на электромагнитном взаимодействии, которое осуществляется посредством электрического тока и магнитного поля. Электрическая машина, в которой электромагнитное взаимодействие осуществляется при помощи магнитного поля называется индуктивной, а в которой при помощи электрического — ёмкостной. Ёмкостные машины практически не используются, так как при конечной проводимости воздушной среды (при наличии влаги) заряды будут исчезать из активной зоны электрической машины в землю.
По направлению преобразования энергии электрические машины разделяют на:
- генераторы, если основным является преобразование кинетической энергии в электрическую с побочным выделением тепла;
- двигатели, если основным является преобразование электрической энергии в кинетическую с побочным выделением тепла;
- трансформаторы (а также умформеры и фазорасщепители), если основным является преобразование электрической энергии с одними параметрами в электрическую с другими с побочным выделением тепла;
- электромеханические преобразователи энергии, если преобразование электрической энергии целенаправленно производится в тепловую и механическую.
Для большинства машин выполняется принцип обратимости, когда одна и та же машина может выступать как в роли двигателя, так и в роли генератора или электромагнитного тормоза.
В большинстве электрических машин выделяют ротор — вращающуюся часть, и статор — неподвижную часть, а также воздушный зазор, их разделяющий.
По принципу действия выделяют такие типы машин:
- Асинхронная машина — электрическая машина переменного тока, в которой частота вращения ротора отличается от частоты вращения магнитного поля в воздушном зазоре на частоту скольжения.
- Синхронная машина — электрическая машина переменного тока, в которой частоты вращение ротора и магнитного поля в зазоре равны.
- Машина двойного питания — электрическая машина переменного тока, в которой ротор и статор в общем случае имеют разные частоты питающего тока. В результате ротор вращается с частотой, равной сумме (разности) питающих частот.
- Машина постоянного тока — электрическая машина, питаемая постоянным током и имеющая коллектор.
- Универсальный коллекторный двигатель — электрическая машина, питаемая постоянным или переменным током и имеющая коллектор.
- Вентильный двигатель — электрическая машина постоянного тока, в которой механический коллектор заменён полупроводниковым коммутатором (ПК), возбуждение осуществляется от постоянных магнитов, размещенных на роторе; а статорная обмотка, как в синхронной машине. ПК по сигналам логического устройства поочерёдно, в определённой последовательности, попарно подключает фазы электродвигателя к источнику постоянного тока, создавая вращающееся поле статора, которое, взаимодействуя с полем постоянного магнита ротора, создаёт вращающий момент электродвигателя.
- Умформер на базе электрической машины (см. также Инвертор) — как правило, пара электрических машин, соединённых валами, выполняющих преобразование рода тока (постоянный в переменный или наоборот), частоты тока, числа фаз, напряжений.
- Сельсин — электрическая машина для дистанционной передачи информации об угле поворота.
- Трансформатор — электрический аппарат[2] переменного тока (электрический преобразователь), преобразующий электрический ток напряжения одного номинала в электрический ток напряжения другого номинала. Существуют статические и поворотные трансформаторы .
Основное:
- Преобразование энергии — основное назначение электрических машин в качестве двигателей или генераторов.
- Преобразование величины напряжения — основное назначение трансформаторов.
Не основное:
Следует отметить что электрической машиной в большинстве случаев является электрический двигатель.
Уточненный расчет рабочих характеристики и использование существующих программ оптимизации позволяют уже на стадии проектирования машины получить весьма совершенную конструкцию. Наиболее распространены следующие методы математического моделирования электрических машин:
— аналитические;
— расчет схем замещения, сформированных с использованием магнитных проводимостей отдельных участков магнитной цепи;
— расчет полей на основе метода конечных элементов.
Аналитические методы основаны на решении уравнений, в которые входят такие величины, как магнитные потоки, напряжения и токи. При исследовании асинхронных машин широкое распространение получил расчет схемы замещения одной фазы. Этот подход обычно применяется при расчете установившихся режимов и реже для расчета переходных процессов. При использовании аналитических методов принимаются допущения:
— плотность тока в проводниках распределена равномерно по их сечению;
— распределение индукции в воздушном зазоре синусоидально;
— нагрев машин не влияет на значения параметров схемы замещения;
— нелинейность магнитных цепей (работа в настоящее время сосредоточена на моделях, которые учитывают эффект насыщения в определении параметров эквивалентной схемы).
Погрешность аналитических расчетов может достигать 15-20% и выше.
Численные методы стали широко применяться в последнее время в связи с быстрым развитием вычислительных машин и компьютерных технологий. Современные компьютерные программы позволяют решать не только двухмерные, но и трехмерные задачи. Обычно численные методы предполагают использование различных по форме расчетных сеток, представляющих область задачи, причем точность модели тем выше, чем больше число узлов сетки. Применяются модели, основанные на методе конечных разностей (МКР), в котором используются ортогональные сетки, и модели, основанные на методе конечных элементов (МКЭ), в котором узлы сетки могут быть распределены более рационально. Преимуществом численных методов является то, что они позволяют не только повысить точность решения полевой задачи, но и учесть такие факторы, как насыщение магнитной цепи машины, вытеснение тока в проводниках и сложность границ сред.
При расчете магнитных полей с учетом нелинейности свойств сред численными методами обычно применяют итерационный метод Ньютона-Рафсона. При этом при использовании метода конечных элементов матрицы коэффициентов имеют ленточную структуру, обеспечивающую снижение числа операций.
Современные программы, основанные на методе конечных элементов, позволяют рассчитывать ЭДС и токи обмоток статора и ротора, учитывать вращение ротора относительно статора, зубчатость сердечников, насыщение стали, наведение вихревых токов в массивных элементах конструкции, сложный характер распределения магнитного поля в зазоре. Кроме того, современные конечно-элементные программы позволяют рассчитывать объемные (трехмерные) конструкции. Точность расчетов по конечно- элементным программам была неоднократно подтверждена экспериментальными исследованиями. Говоря о времени решения, следует заметить следующее. Чем сложнее моделируемая машина, тем больше длительность процесса вычислений. Расчет рабочих режимов асинхронных машин при этом обладает еще и той особенностью, что частота токов, индуктированных в роторе, относительно мала. Если переходные процессы рассчитываются методом численного интегрирования системы дифференциальных уравнений, требующим разбиения всего рассматриваемого временного интервала на достаточно малые шаги, время, затрачиваемое на вычисления, может быть значительным.
Современные методы расчета[править | править код]
В целях сокращения времени и сохранения точности, появились другие методы. Такие подходы, как правило, применяют несколько методов одновременно, то есть являются комбинированными методами.
К этим методам относятся, в частности, методы, основанные на расчете эквивалентных схем замещения магнитных цепей, то есть на дискретизации электромагнитной системы в виде потока. Предполагается, что магнитное поле состоит из определенного числа магнитных трубок переменного сечения. В пределах каждой трубки поток постоянен, а все линии поля расположены строго параллельно стенкам трубок. Такой подход к созданию схем замещения обоснован только для ферромагнитных участков сердечников, для воздушного зазора он может быть применен с некоторыми допущениями. Определить форму, направление и число трубок поля в этой части машины трудно, особенно если учитывать взаимное перемещение сердечников.
Существуют методы, позволяющие правильно воспроизвести поле в воздушном зазоре. Это методы зубцовых контуров и эквивалентных проводимостей воздушного зазора.
В методе эквивалентных проводимостей магнитные проводимости воздушного зазора находятся как произведение частных проводимостей, найденных при односторонней и двусторонней зубчатости сердечников.
Более универсальным методом расчета электрических машин является МЗК. МЗК, первоначально разработанный для расчета гидрогенераторов , был затем обобщен и применен для расчета различных типов электрических машин, включая асинхронные машины с короткозамкнутым ротором.
В этих работах потокосцепления обмоток электрической машины выражаются через индуктивные параметры зубцовых контуров, образованных токами, лежащими на дне пазов или сосредоточенными, а стенках пазов. Такое представление источников поля позволяет использовать теорию скалярного магнитного потенциала, что заметно упрощает расчеты.
Идея МЗК заключается в представлении поля в воздушном зазоре электрической машины в виде суммы полей так называемых зубцовых контуров. Этот метод позволяет провести детальный анализ магнитного поля отдельного зубцового контура и определить магнитную проводимость в воздушном зазоре с учетом двусторонней зубчатости статора и ротора, взаимного перемещения сердечников, а так же реальной формы тока или напряжения обмотки якоря.
Синхронные машины
7.8 Устройство синхронной машины
Для синхронных машин характерно, что ротор в установившемся режиме вращается с угловой скоростью вращающегося магнитного поля, создаваемого токами в фазных обмотках статора. Это достигается тем, что ротор синхронной машины представляет собой электромагнит с числом пар полюсов, равным числу пар полюсов вращающегося магнитного поля. Взаимодействие вращающегося магнитного поля и полюсов ротора обеспечивает постоянную угловую скорость последнего независимо от момента на валу. Это свойство позволяет использовать синхронные машины в качестве двигателей для привода механизмов с постоянной угловой скоростью. Распространенность синхронных двигателей не так широка, как асинхронных, но, например, в металлургии, их использование становиться необходимым. Единичная мощность синхронного двигателя в приводах большой мощности достигает нескольких десятков мегаватт. Основной областью применения синхронных машин является использование в качестве промышленных генераторов для выработки электрической энергии на электростанциях. Единичная мощность современных электрогенераторов достигает 1500 МВА.
Основными частями синхронной машины являются статор и ротор, причем статор не отличается от статора асинхронной машины. Обмотка статора обычно соединяется звездой. Ротор имеет обмотку возбуждения, которая через контактные кольца и щетки питается постоянным током от возбудителя или от сети переменного тока через выпрямитель. Возбудитель – генератор постоянного тока, установленный на валу ротора.
Принцип действия генератора основан на явлении электромагнитной индукции. Приводным двигателем ротор приводится во вращение с частотой n1. При вращении ротора, запитанного от возбудителя, магнитный поток тоже вращается и пересекает обмотки статора, в которых индуктируется симметричная трехфазная система ЭДС.
Ротор должен вращаться с частотой вращения поля, следовательно, его синхронная частота вращения равна
| (7.11) |
Частота переменного тока стандартизирована, поэтому для ее получения необходимо обеспечить постоянную, независимую от нагрузки скорость вращения. С этой целью первичные двигатели на электрических станциях оборудуются автоматическими регуляторами скорости.
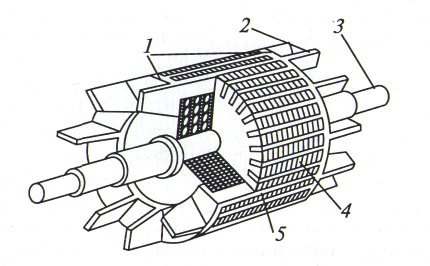
Роторы синхронных машин могут иметь две принципиально различающиеся конструкции: явнополюсную и неявнополюсную (рисунок 7.5).
В энергетических установках по производству электроэнергии переменного тока в качестве первичных двигателей синхронных генераторов применяют в основном три вида двигателей: паровые турбины; гидравлические турбины и двигатели внутреннего сгорания (дизели).
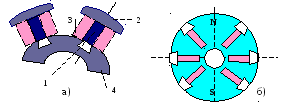

Рисунок 7.5– Конструкция роторов синхронных машин:
а) явнополюсный; б) неявнополюсный
Если приводным двигателем является гидравлическая турбина, то синхронный генератор называют гидрогенератором. Гидравлическая турбина вращается медленно (60 об/мин) и роторы гидрогенераторов выполняют многополюсными с явнополюсной конструкцией.
Паровая турбина работает при частоте вращения (1500-3000) об/мин, поэтому приводимый ею во вращение генератор, называемый турбогенератором, является быстроходной синхронной машиной. Роторы этих генераторов выполняют двухполюсными или четырехполюсными. В процессе работы турбогенератора на его ротор действуют значительные центробежные силы, поэтому по условиям механической прочности применяют неявнополюсный ротор. Сердечник неявнополюсного ротора изготовляют в виде цельной стальной поковки или же делают сборным. Обмотка возбуждения неявнополюсного ротора занимает 2/3 его поверхности, а 1/3 поверхности – полюсы.
Дизель-генераторы работают с частотой вращения 600-1500 об/мин и выполняются с явнополюсным ротором. Используются в сельском хозяйстве, на транспорте в качестве основного, резервного и аварийного источника электрической энергии.
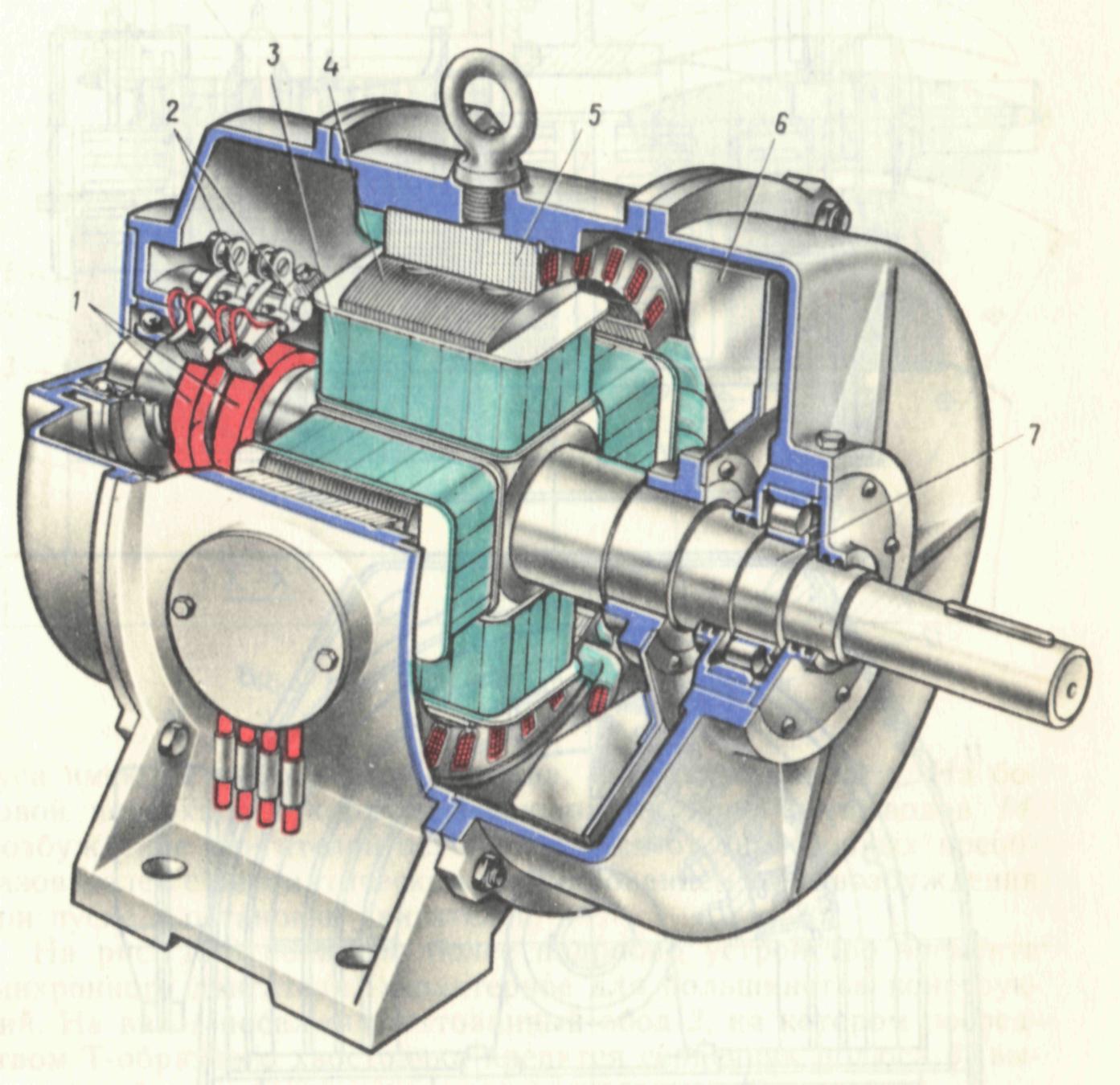
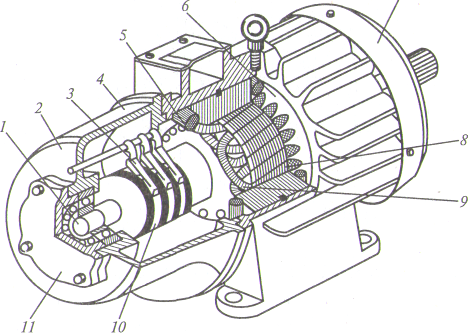
Рисунок 7.6 – Синхронный генератор (дизель-генератор):
1 – контактные кольца; 2— щеткодержатели; 3— полюсная катушка ротора;
4— полюсный наконечник; 5— сердечник статора; 6— вентилятор; 7— вал
Большую группу синхронных машин составляют синхронные двигатели, которые обычно изготовляются мощностью до нескольких тысяч киловатт и предназначены для привода мощных вентиляторов, мельниц, насосов и других устройств, не требующих регулирования частоты вращения. Синхронные двигатели конструктивно не отличаются от синхронных генераторов.
6.3.4. Принцип действия и устройство электрических машин переменного тока
Как и машины постоянного тока, электрические машины переменного тока состоят из статора и ротора. По способу образования магнитного поля статора и ротора машины переменного тока делятся на две группы: асинхронные и синхронные. В основе работы асинхронных и синхронных машин лежит образование вращающегося магнитного поля.
Обмотки статора обычно присоединяются к сети переменного тока и создают вращающееся магнитное поле, поэтому устройство этой части асинхронных и синхронных машин получается одинаковым.
Получение вращающегося магнитного поля. В асинхронных и синхронных машинах вращающееся магнитное поле статора образуется при протекании трехфазного тока в трех обмотках, оси которых сдвинуты в пространстве на 120°/р, где р — число пар полюсов обмотки. При р = 1 получается двухполюсное вращающееся магнитное поле, образование которого можно пояснить с помощью рис. 6.27.
| |
а | б |
|
|
в | г |
|
|
д | е |
Рис. 6.27 | |
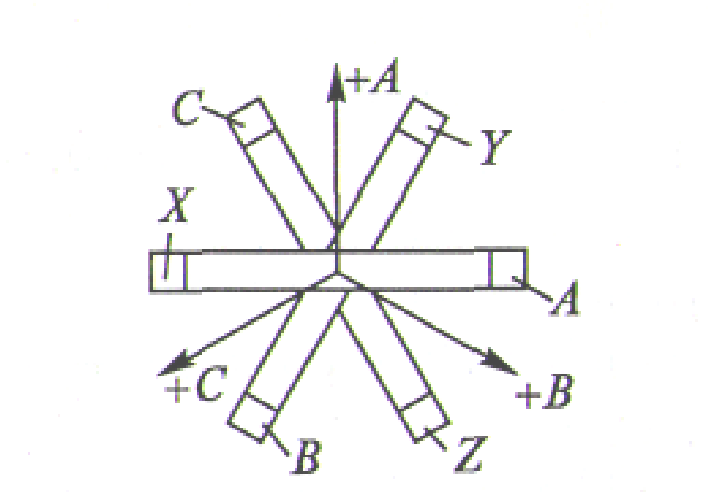
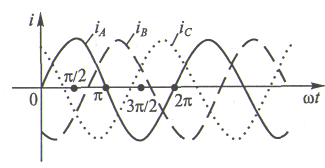
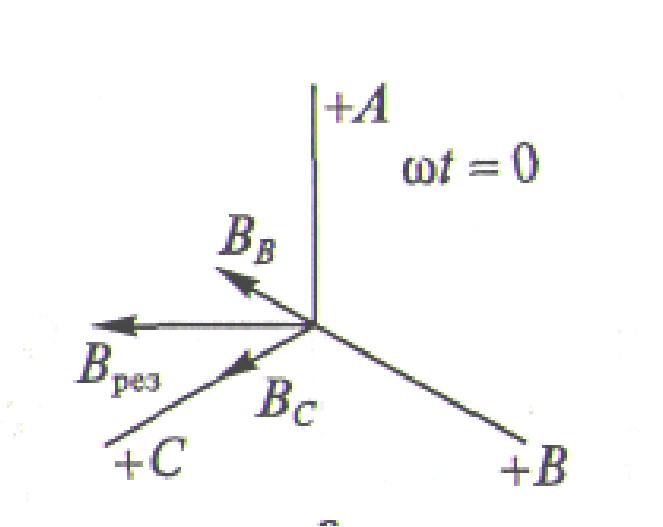
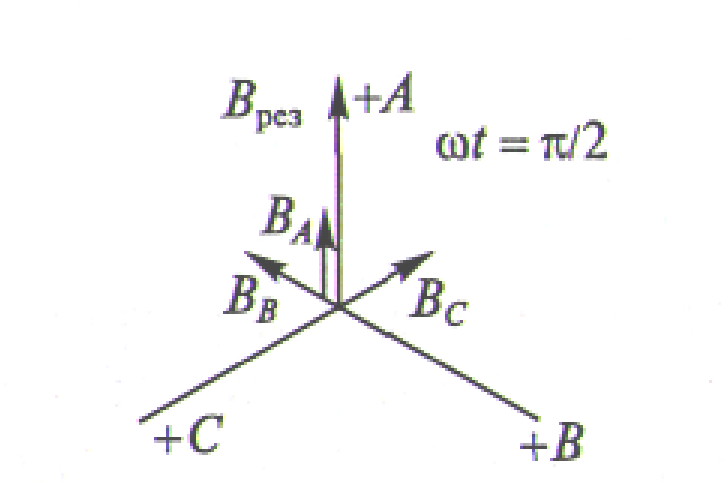

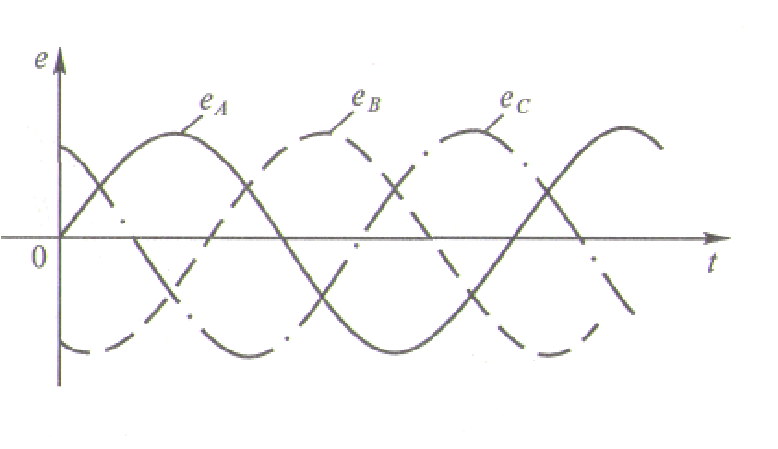
Расположим три одинаковые катушки AX, BY, CZ так, что их оси смещены на 120° по отношению друг к другу (рис. 6.27а). Присоединим катушки к симметричной трехфазной системе ЭДС. Пусть токи входят в начало катушек А, В, С и изменяются следующим образом:
Графическое изменение этих токов во времени показано на рис. 6.27б.
Каждый из токов будет создавать пульсирующее поле, направленное вдоль оси своей катушки. Положительное направление магнитной индукции поля первой катушки в соответствии с правилом буравчика обозначим +А (ток направлен от начала катушки А к ее концу X), второй — +В, третьей — +С. Индукцию первой катушки обозначим ВА, второй – ВB, третьей — ВC.
Изобразим
мгновенные значения ВА, ВB, ВС и
результирующую индукцию Врез для
моментов времени  (рис. 6.27в, г, д, е).
(рис. 6.27в, г, д, е).
Очевидно,
что с течением времени вектор результирующей
магнитной индукции, оставаясь по величине
неизменным, вращается в направлении от
начала первой катушки с током  к началу второй катушки с отстающим
током
к началу второй катушки с отстающим
током .
Если поменять токи двух любых катушек
местами, направление вращения поля
изменится на обратное.
.
Если поменять токи двух любых катушек
местами, направление вращения поля
изменится на обратное.
Таким
образом, полный оборот результирующий
вектор магнитной индукции двухполюсного
магнитного поля совершит за время,
равное периоду  переменного тока обмотки, т.е. частота
вращения двухполюсного магнитного поля
переменного тока обмотки, т.е. частота
вращения двухполюсного магнитного поля (об/мин), где
(об/мин), где — частота питающей сети.
— частота питающей сети.
Токи
в трехфазной обмотке могут возбуждать
не только двухполюсное, но и многополюсное
вращающееся магнитное поле. Для этого
количество катушек в фазе увеличивается
в число раз, равное требуемому числу
пар полюсов  магнитного поля, а размеры катушек
уменьшаются в такое же число раз.
магнитного поля, а размеры катушек
уменьшаются в такое же число раз.
Скорость вращения магнитного поля, образующего две пары полюсов, будет в два раза меньше, чем скорость вращения двухполюсного поля, так как за один период изменения токов полюсы поворачиваются на пространственный угол, равный 180о.
В общем случае
 (об/мин), (6.3)
(об/мин), (6.3)
где  —
число пар полюсов магнитного поля.
—
число пар полюсов магнитного поля.
Из выражения (6.3.) видно, что при принятой в нашей стране и многих других странах мира промышленной частоте 50 Гц частота вращения магнитных полей статора с трехфазной обмоткой при различном числе пар полюсов составит:
| 1 | 2 | 3 | 4 | 5 |
| 3000 | 1500 | 1000 | 750 | 600 |
Принцип действия и устройство асинхронного двигателя. Вращающееся поле статора пересекает проводники обмотки ротора и индуцирует в них ЭДС. При замкнутой обмотке ротора под действием ЭДС в обмотке возникают токи, направление которых определяется по правилу правой руки (рис. 6.28.). | |
Рис. 6.28 |
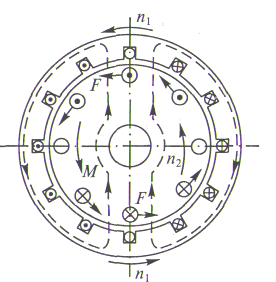
Взаимодействие
этих токов с полем статора создает
действующие на проводники электромагнитные
силы F,
направление
которых определяется по правилу левой
руки. Как видно из рис. 6.28, эти силы
стремятся повернуть ротор в направлении
вращения магнитного поля статора.
Совокупность сил F,
приложенных
к отдельным проводникам, создает на
роторе электромагнитный момент M,
приводящий
его в движение с частотой вращения  .
.
Относительную
разность  и
и принято
характеризовать безразмерной величиной,
называемой скольжением
принято
характеризовать безразмерной величиной,
называемой скольжением  .
Важнейшим
свойством асинхронной машины является
то, что при ее работе магнитное поле
статора и ротор перемещаются с разными
частотами вращения, не синхронно
(асинхронно), что и получило отражение
в наименовании этой машины.
.
Важнейшим
свойством асинхронной машины является
то, что при ее работе магнитное поле
статора и ротор перемещаются с разными
частотами вращения, не синхронно
(асинхронно), что и получило отражение
в наименовании этой машины.
Скольжение
асинхронного двигателя может изменяться
в пределах  .
При этом
.
При этом соответствует режиму холостого хода,
когда ротор не испытывает противодействующих
моментов, а
соответствует режиму холостого хода,
когда ротор не испытывает противодействующих
моментов, а соответствует неподвижному ротору(
соответствует неподвижному ротору( )
— режим короткого замыкания или пуска.
Обычно в номинальном режиме асинхронного
двигателя величина скольжения составляет
0,01…0,06.
)
— режим короткого замыкания или пуска.
Обычно в номинальном режиме асинхронного
двигателя величина скольжения составляет
0,01…0,06.
Как
и все электрические машины, асинхронные
двигатели обратимы, т. е. они могут
работать в режиме генератора, отдающего
энергию в трехфазную сеть. Для этого
внешними силами ротор необходимо
раскрутить до частоты вращения  ,
большей
чем
,
большей
чем  ,
при этом
,
при этом .
Токи обмотки ротора создают свое
собственное магнитное поле. Анализ
показывает, что независимо от частоты
вращения ротора, магнитное поле его
токов перемещается в пространстве с
той же частотой вращения
.
Токи обмотки ротора создают свое
собственное магнитное поле. Анализ
показывает, что независимо от частоты
вращения ротора, магнитное поле его
токов перемещается в пространстве с
той же частотой вращения ,
что
и магнитное поле статора, т.е. в любом
режиме асинхронной машины магнитные
поля статора и ротора взаимно неподвижны
друг относительно друга. Этим и
обеспечивается электромеханическое
преобразование энергии в асинхронной
машине.
,
что
и магнитное поле статора, т.е. в любом
режиме асинхронной машины магнитные
поля статора и ротора взаимно неподвижны
друг относительно друга. Этим и
обеспечивается электромеханическое
преобразование энергии в асинхронной
машине.
Рассмотренный принцип работы асинхронных машин определяет и их конструкцию, состоящую из статора и ротора. Статоры трехфазных асинхронных двигателей устроены одинаково, а роторы конструктивно отличаются друг от друга.
Основными частями статора являются корпус, сердечник и трехфазная обмотка. С корпусом прочно соединены два боковых подшипниковых щита с подшипниками, в которых вращается вал ротора.
Начала и концы фаз асинхронных машин состоят из пакета магнитопровода цилиндрической формы, набранного из стальных дисков с пазами, в которых располагаются обмотки. Пакет магнитопровода с обмоткой расположен на валу. Между пакетом ротора и пакетом сердечника статора имеется равномерный зазор.
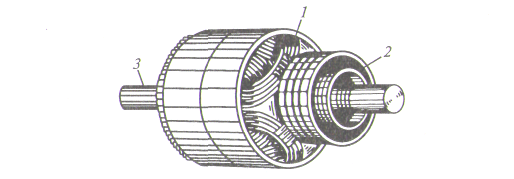
Различают два типа обмоток ротора. Обмотки первого типа содержат медные или алюминиевые стержни, вставляемые или заливаемые в пазы ротора без изоляции. Эти стержни замыкаются накоротко по обоим торцам пакета ротора медными или алюминиевыми кольцами соответственно. Двигатель с ротором такого типа называют короткозамкнутым или с «беличьей клеткой» (рис. 6.29а). Ротор также называется короткозамкнутым (рис. 6.29б).
| |
а | б |
Рис. 6.29 | |
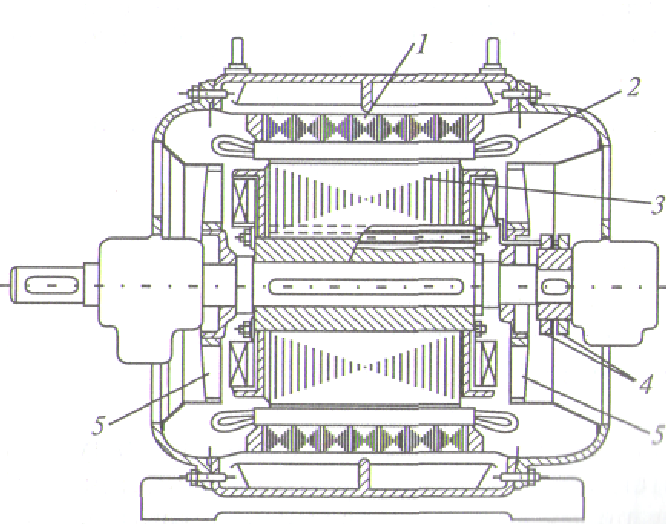
На рис. 6.29а обозначено: 1 — корпус статора; 2 — коробка выводов; 3 — обмотка статора; 4 — сердечник статора; 5 — ротор; 6 — подшипниковый щит.
На рис. 6.29б обозначено: 1 — замыкающие кольца; 2 вентиляционные лопасти; 3 — вал; 4 — пакет ротора; 5 — стержни обмотки.
В пазы обмоток второго типа укладывается трехфазная обмотка, как и на статоре. Фазы обмотки соединяются звездой и три свободных ее конца присоединяются к трем изолированным контактным кольцам, насаженным на вал (рис. 6.30а).
|
а |
|
б |
Рис. 6.30 |
На рис. 6.30а обозначено: 1 — вал; 2 — подшипниковый щит; 3 — щеткодержатель; 4 — крышка люка; 5 — обмотка статора; 6 — сердечник статора; 7 — кожух вентилятора; 8 — сердечник ротора; 9 — обмотка ротора; 10 — контактные кольца; 11 — крышка подшипника.
На рис. 6.30б обозначено: 1 — обмотка; 2 — контактные кольца; 3 – вал.
На боковом подшипниковом щите укрепляется щеткодержатель, причем так, чтобы расположенные в нем три группы щеток надежно соприкасались с контактными кольцами ротора. Ротор с катушечной трехфазной обмоткой и контактными кольцами называют фазным (рис. 6.30б). Машины с контактными кольцами допускают подключение внешней цепи к цепи ротора для изменения характеристик двигателя в процессе управления.
Асинхронные двигатели являются самыми распространенными электрическими машинами в промышленности и сельском хозяйстве.
Принцип действия и устройство синхронных машин. Синхронной называется такая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля статора, определяемой выражением (6.3).
Ротор такой машины представляет электромагнит, возбуждаемый постоянным током. В синхронных машинах малой мощности вместо обмотки на роторе могут использоваться постоянные магниты.
В режиме генератора ротор синхронной машины приводится во вращение первичным двигателем с номинальной скоростью, которая поддерживается постоянной автоматическим регулятором. После этого генератор возбуждается подачей постоянного тока в обмотку ротора. Вращающийся с постоянной скоростью поток полюсов (рис. 6.31а), пересекая трехфазную обмотку статора, наводит в ней ЭДС, одинаковые по амплитуде и частоте, сдвинутые по фазе относительно друг друга на угол 120° (рис. 6.31б).
|
|
а | б |
Рис. 6.31 | |

На рис. 6.32 изображено устройство трехфазной синхронной машины.
|
Рис. 6.32 |
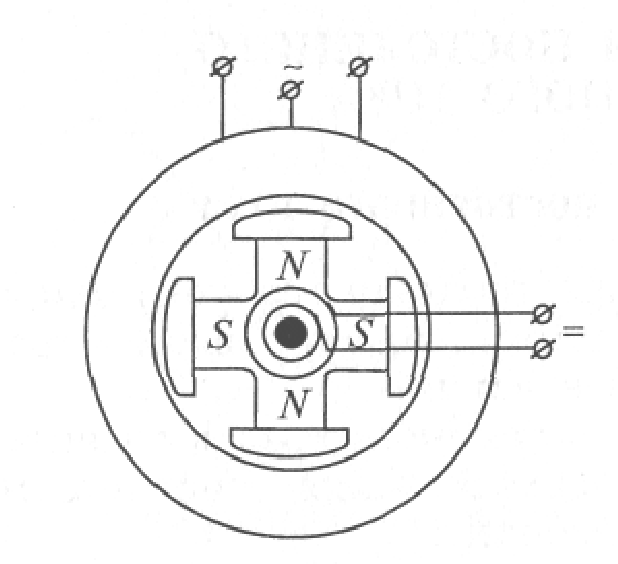
На рис. 6.33 обозначено: 1 – сердечник статора; 2 – трехфазная обмотка статора; 3 – полюсы ротора с обмоткой постоянного тока; 4 – кольца для соединения обмотки ротора с источником постоянного тока; 5 – вентиляторы.
По устройству ротора различают два типа синхронной машины: машина с явнополюсным ротором, в которой катушки обмотки постоянного тока размещены на выступающих полюсах (рис. 6.33а), и машина с неявнополюсным ротором, в котором распределенная обмотка постоянного тока уложена в пазы ротора (рис. 6.33б).
Явнополюсная синхронная машина изготовляется для скорости вращения до 1500 об/мин и используется в качестве генератора или двигателя. Наиболее крупные синхронные машины устанавливаются на гидроэлектростанциях и приводятся во вращение водяными турбинами со скоростью до 300 об/мин.
| |
а | б |
Рис. 6.33 | |
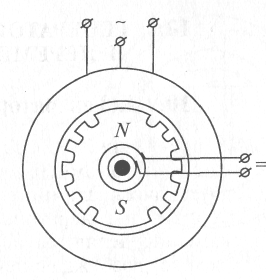
Неявнополюсная синхронная машина используется в основном как генератор на тепловых электростанциях и приводится во вращение паровой турбиной со скоростью обычно 3000 об/мин (при частоте 50 Гц).
ЭДС
в обмотках машин переменного тока. Вращающееся
магнитное поле статора
асинхронных и синхронных машин индуцирует
в фазных обмотках статора ЭДС,
пропорциональную магнитной индукции
магнитного потока Ф полюса вращающегося магнитного поля и
относительной скорости перемещения
проводника обмотки относительно поля.
Последняя пропорциональна частоте
вращения магнитного поля  и, следовательно,
частоте сети
и, следовательно,
частоте сети  (6.3), поэтому действующее значение ЭДС
фазы статора определяется по формуле
(6.3), поэтому действующее значение ЭДС
фазы статора определяется по формуле
 , (6.4)
, (6.4)
где  ,
— конструктивный коэффициент, зависящий
от геометрических размеров машины, типа
и параметров обмотки статора.
,
— конструктивный коэффициент, зависящий
от геометрических размеров машины, типа
и параметров обмотки статора.
В синхронной машине ротор вращается синхронно с полем статора, т.е. по отношению к вращающемуся полю, обмотка ротора неподвижна и в ее проводниках ЭДС не индуцируется.
Напротив,
в асинхронной машине частоты вращения
магнитного поля статора  и ротора
и ротора  неодинаковы.
Поэтому обмотка ротора перемещается
относительно вращающегося поля статора
с частотой скольжения
неодинаковы.
Поэтому обмотка ротора перемещается
относительно вращающегося поля статора
с частотой скольжения  .
.
В
соответствии с этим ЭДС ротора асинхронной
машины вращающегося со скольжением  определяется по формуле
,
где
определяется по формуле
,
где — конструктивный коэффициент обмотки
ротора.
— конструктивный коэффициент обмотки
ротора.
Синхронный двигатель Назначение и область применения
Синхронные машины, являются машинами переменного тока. Применяются в качестве двигателя и генератора.
Синхронные двигатели применяются в основном в приводах большой мощности. Мощность их достигает нескольких десятков мегаватт. На тепловых станциях, металлургических заводах, шахтах, Холодильниках приводят в движение насосы, и другие механизмы, работающие с неизменной скоростью. Синхронные двигатели могут работать с различной реактивной мощностью. Таким образом, Эти двигатели позволяют улучшить коэффициент мощности предприятия. Однако стоимость приводов с синхронным двигателями выше, чем с асинхронными.
Специальные двигатели малой мощности используют в устройствах, где строгое постоянство скорости, электрочасы, автоматические самопишущие приборы, устройства с программным управлением и др.
Н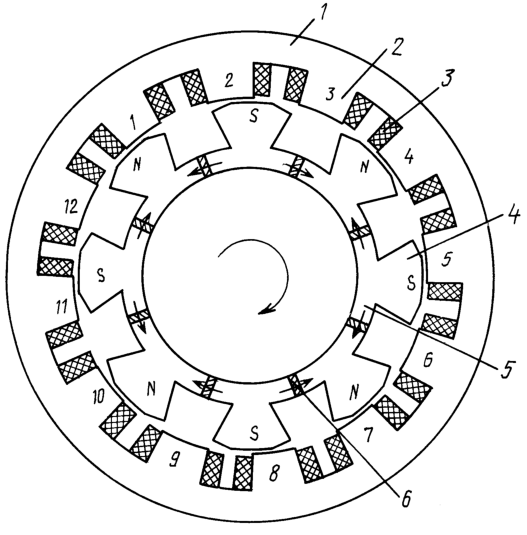 а
крупных подстанциях электрических
систем устанавливают специальные
синхронные машины, работающие в режиме
холостого хода и отдающие в сеть только
реактивную мощность, которая необходима
для асинхронных двигателей. Эти машины
называют синхронными компенсаторами.
а
крупных подстанциях электрических
систем устанавливают специальные
синхронные машины, работающие в режиме
холостого хода и отдающие в сеть только
реактивную мощность, которая необходима
для асинхронных двигателей. Эти машины
называют синхронными компенсаторами.
Устройство синхронного двигателя с возбуждением от постоянных магнитов
Изобретение относится к области использования трехфазных синхронных машин для выработки электроэнергии. Устройство состоит из расположенных на одном валу трехфазного синхронного двигателя и трехфазного синхронного генератора, которые выполнены с возбуждением от постоянных магнитов. Ротор и статор двигателя и генератора имеют явно выраженные полюса. Обмотки статора намотаны вокруг полюсов статора. Постоянные магниты возбуждения в двигателе и генераторе размещены в спинках ротора между его полюсами. В центре полюсов ротора генератора находятся плоские компенсационные постоянные магниты, размещенные в плоскостях, проходящих через ось генератора.
Пуск синхронного двигателя
Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска.
Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами развернуть другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
Д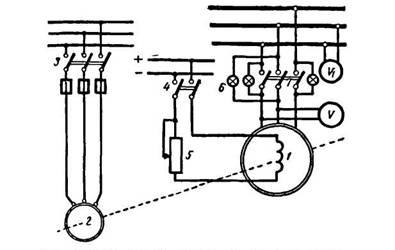 ля
осуществления пуска необходимо, чтобы
число пар полюсов асинхронного двигателя
было меньше числа пар полюсов синхронного
двигателя, ибо при этих условиях
вспомогательный асинхронный двигатель
может развернуть ротор синхронного
двигателя до синхронной скорости.
ля
осуществления пуска необходимо, чтобы
число пар полюсов асинхронного двигателя
было меньше числа пар полюсов синхронного
двигателя, ибо при этих условиях
вспомогательный асинхронный двигатель
может развернуть ротор синхронного
двигателя до синхронной скорости.
Порядок пуска синхронного двигателя следующий. Включая рубильник 3, пускают вспомогательный асинхронный двигатель 2, который разворачивает ротор синхронного двигателя 1 до скорости, соответствующей скорости поля статора. Скорость вращения вспомогательного двигателя определяется по тахометру1. Затем, включая рубильник 4 постоянного тока, возбуждают полюсы ротора. Чтобы включить синхронный двигатель в сеть трехфазного тока, его нужно синхронизировать так же, как и при включении синхронного генератора на параллельную работу. Для этого реостатом 5 устанавливают такое возбуждение, чтобы напряжение обмотки статора по вольтметру V было равно напряжению сети, указываемому вольтметром V1.
Электролампы 6, включенные параллельно ножам рубильника 7 трех-фазной сети, при разомкнутом рубильнике будут мигать. Сначала мигание будет частым, но если изменять скорость вращения вспомогательного асинхронного двигателя, то лампы будут мигать . все реже и реже. Синхронный двигатель можно включить в сеть трехфазного тока рубильником 7 тогда, когда все три лампы одновременно погаснут. Ротор двигателя при этом входит в синхронизм и может далее вращаться самостоятельно. Теперь вспомогательный двигатель 2 рубильником 3 можно отключить от сети.
Сложность пуска и необходимость вспомогательного двигателя являются существенными недостатками этого способа пуска синхронных двигателей. Поэтому в настоящее время он применяется редко.
Асинхронный пуск синхронного двигателя. Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения 1 двигателя наводится большая э. д. с, то по соображениям безопасности она замыкается рубильником 2 на сопротивление 3
П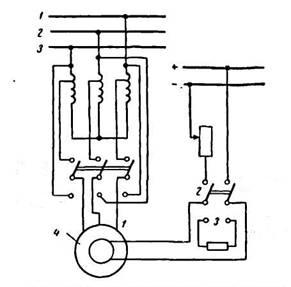 ри
включении напряжения трехфазной сети
в обмотку статора 4 синхронного двигателя
возникает вращающееся магнитное поле,
которое, пересекая короткозамкнутую
(пусковую) обмотку, заложенную в полюсных
наконечниках ротора, индуктирует в ней
токи.
ри
включении напряжения трехфазной сети
в обмотку статора 4 синхронного двигателя
возникает вращающееся магнитное поле,
которое, пересекая короткозамкнутую
(пусковую) обмотку, заложенную в полюсных
наконечниках ротора, индуктирует в ней
токи.
Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник 2 переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора 2 или автотрансформатора.
В настоящее время применяют почти исключительно асинхронный пуск синхронных двигателей ввиду его простоты и надежности. Существуют также схемы автоматического асинхронного пуска синхронных двигателей
Лекция №5 Электромеханические характеристики синхронных электродвигателей
5.1 Принцип работы синхронного двигателя
Для нерегулируемых электроприводов большой мощности (свыше 160кВт) широко применяются синхронные электродвигатели с электромагнитным возбуждением. Схема включения такого двигателя показана на рис.3.23.
Конструкция статора синхронного двигателя аналогична конструкции статора асинхронного двигателя. Токи, протекающие по трехфазной обмотке статора, создают намагничивающие силы, результирующий вектор которых образует вращающееся в пространстве электромагнитное поле статора Ф,. Скорость вращения поля статора равна согласно (3.3)
и является рабочей скоростью синхронного двигателя.
На роторе синхронного двигателя расположена обмотка возбуждения, которая питается постоянным током от независимого регулируемого источника напряжения — возбудителя. Ток возбуждения создает электромагнитное поле Ф0, неподвижное относительно ротора и вращающееся в установившемся режиме вместе с ротором со скоростью а>0. Магнитные силовые линии поля ротора сцепляются с вращающимся синхронно с ним электромагнитным полем статора. Взаимодействие полей статора и ротора создает электромагнитный момент на валу синхронной машины.
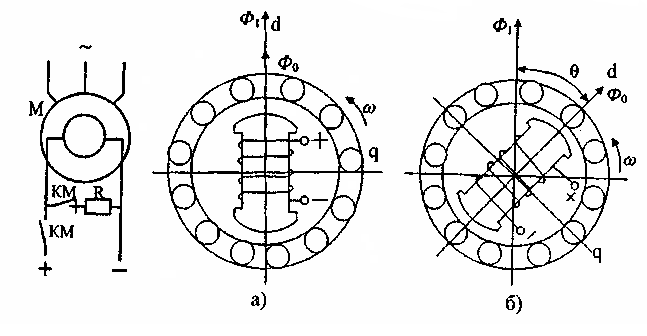
Рис.3.23. Схе- Рис.3.24. Пространственные векторы электро-
ма включения магнитных полей синхронного двигателя
синхронного а) идеальный холостой ход;
двигателя б) при нагрузке на валу
При отсутствии нагрузки векторы поля статора Ф1 и поля ротора Ф0 совпадают в пространстве (см. рис.3.24,а) и совместно вращаются со скоростью ω0. При появлении на валу двигателя момента сопротивления векторы Ф1, и Ф0 расходятся (как бы растягиваются подобно пружине) на угол θ, называемый углом нагрузки, причем, если вектор Ф0 отстает от вектора Ф1 (см. рис. 3.24,6), то синхронная машина работает в двигательном режиме и электромагнитный момент на ее валу положителен. Если синхронная машина работает генератором, приводимым во вращение первичным двигателем, то вектор поля ротора опережает вектор поля статора на угол (–θ ) и электромагнитный момент на валу машины отрицателен. Изменению нагрузки на валу машины соответствует изменение угла θ. Образно это соответствует растяжению-сжатию пружины. Максимальный момент Ммакс будет иметь место при θ – π/2 . Если нагрузка на валу машины будет больше Ммахс, то синхронный режим нарушается и машина выпадает из синхронизма.
Механическая характеристика синхронной машины представляют собой прямую, параллельную оси абсцисс и ограниченную значениями момента ± Ммакс (рис.3.25). Жесткость механической характеристики равна бесконечности.
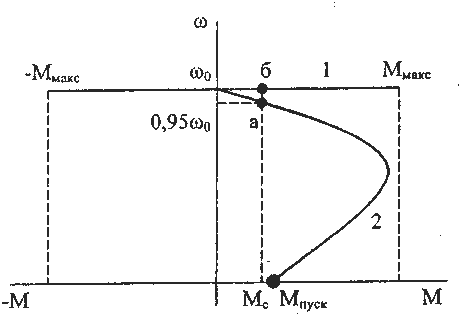
Рис.3.25. Механические характеристики синхронного двигателя
1 — характеристика синхронного режима
2 — пусковая характеристика (асинхронный режим)
Поскольку ротор двигателя вращается с синхронной скоростью и скольжение отсутствует, то вся мощность электромагнитного поля статора Рэм преобразуется в механическую мощность на валу синхронного двигателя. Если пренебречь потерями в статоре, то Рэм = 3U1I1 соsφ = Мω0, откуда
 (3.39)
(3.39)
Рассмотрим векторную диаграмму неявнополюсной синхронной машины (рис. 3.26). Двигатель с неявнополюсным ротором имеет симметричную в магнитном отношении конструкцию. Пренебрегая активным сопротивлением статора, получим Ů1 – Ė1 = jI1x1.
Здесь Е, – э.д.с., наводимая в обмотках статора вращающимся вместе с ротором полем Ф0.
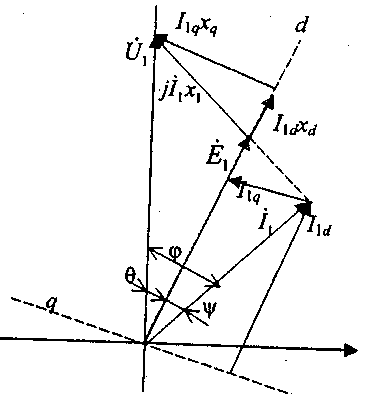
Рис.3.26. Векторная диаграмма синхронного двигателя
Из векторной диаграммы следует:
U1 sin θ = I1x1 cos (φ – θ)

U1cos φ = E1 cos(φ – θ)
Подставляя эти значения в (3.39), получим выражение для угловой характеристики неявнополюсной синхронной машины
 (3.40)
(3.40)
Из этого выражения и соответствующей ему угловой характеристики (рис.3.27) следует, что по мере нагружения синхронной машины угол нагрузки увеличивается и момент достигает максимума при θ = π/2. Для сохранения постоянной перегрузочной способности двигателя предусматривается автоматическое увеличение тока возбуждения при приложении ударной нагрузки или снижении величины питающего напряжения.
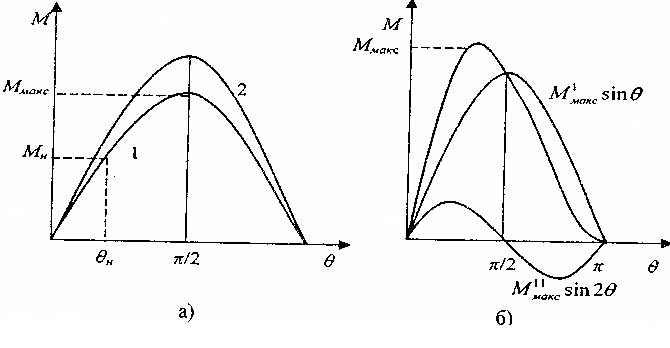
Рис.3.27. Угловая характеристика синхронного двигателя:
а) неявнополюсной машины; б) явнополюсной машины
1 — при номинальном потоке возбуждения;
2 — при форсировке возбуждения
Для синхронного двигателя явнополюсной конструкции, который имеет несимметричную магнитную цепь, кроме момента, вызванного полем ротора, возникает реактивный момент, определяемый стремлением ротора занять такое положение, при котором магнитная проницаемость для пути потока статора была бы максимальной. Угловая характеристика (см. рис.3.27,б) для такого двигателя описывается уравнением:
 +
+ 
где хd и хq– индуктивное сопротивление по продольной и поперечной осям.