


Синхронный, асинхронный – какая разница?! — Электродвигатели для складского и подъемно-транспортного оборудования – Склад и техника
И. Станкевич
Обычно о том, какие электродвигатели стоят на том или ином оборудовании, его владельцы особенно не задумываются, но только до тех пор, пока они не выходят из строя. А уже первые «болезни» этих «скромных тружеников» вызывают коллапс необъятных потоков грузов. На склады России поступает много иностранного подъемно-транспортного оборудования, и читателям будет интересно узнать, какие существуют типы и исполнения электродвигателей, работающих в этих машинах и механизмах.
Электродвигатели – непременная составляющая подъемно-транспортного и автоматизированного оборудования: конвейеров, автоматизированных складов, штабелеров, упаковочных автоматов и иной складской техники. Обычно эти агрегаты подбирают для своего оборудования сами изготовители, но все чаще бывает так, что покупатели и владельцы машин сами могут выбирать электрические силовые агрегаты для нужд своего предприятия в зависимости, например, от специфики условий работы отдельных его участков.
В складском и подъемно-транспортном оборудовании наиболее широко применяют электродвигатели пяти типов:
- электродвигатели постоянного тока с возбуждением от постоянного магнита;
- асинхронные электродвигатели переменного тока. Их применяют в оборудовании непрерывного цикла, например, в обычных конвейерах;
- серводвигатели (сервомоторы). Они работают в машинах, которые должны совершать точные движения, перемещать и позиционировать грузы на строго определенные места: в штабелерах, автоматических складских системах;
- линейные асинхронные двигатели. Используются в оборудовании, для которого важна прежде всего высокая скорость работы, например, в сортировочных машинах;
- мотор-ролики (или мотор-барабаны), т.
 е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
 е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.В чем преимущества асинхронных электродвигателей?
Асинхронные двигатели переменного тока проще и дешевле электродвигателей других типов, поэтому в настоящее время их применяют все чаще. При выборе асинхронного двигателя следует учитывать два фактора – к.п.д. преобразования энергии и тип исполнения агрегата.
К.п.д. В ряде стран законодательством установлена минимальная величина к.п.д. для электродвигателей приводов, однако многие производители изготавливают электродвигатели по более жестким стандартам Национальной ассоциации производителей электрооборудования США (NEMA).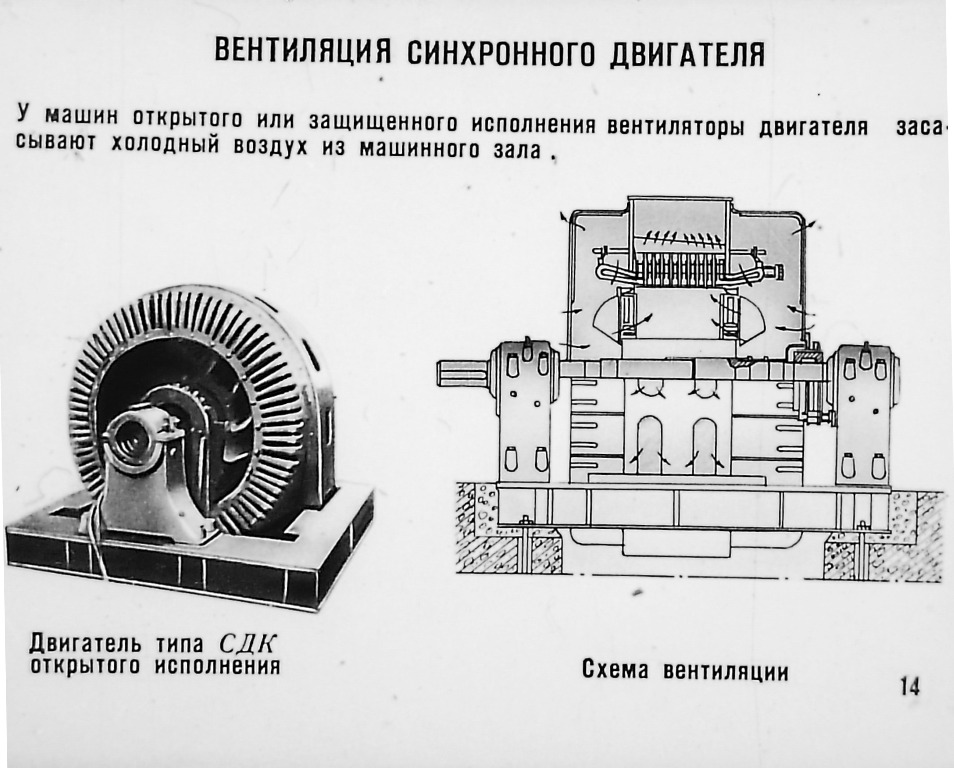
У электродвигателей обычного качества к.п.д. равен 75…85%, у агрегатов высшего качества – 85…95%. Как считают специалисты, агрегаты с высоким к.п.д. стоят намного дороже обычных, но если электродвигатель будет работать непрерывно, он окупится быстро. Кроме того, благодаря экономии энергии улучшается экологическая обстановка, на которую все больше обращают внимание в цивилизованных государствах.
Тип исполнения – важная характеристика при выборе электродвигателя. Существует пять основных исполнений асинхронных электродвигателей:
• ODP (Open drip proof) – «каплезащищенный электродвигатель открытого исполнения». Этот тип электродвигателей наиболее широко используют в промышленности. Они не оборудованы вентилятором и имеют проемы в корпусе, через которые внутрь может проникнуть грязь и влага, поэтому использовать такие электродвигатели рекомендуется только в закрытых помещениях;
• TEFC (Totally Enclosed Fan Cooled) – «закрытого типа с вентиляторным охлаждением».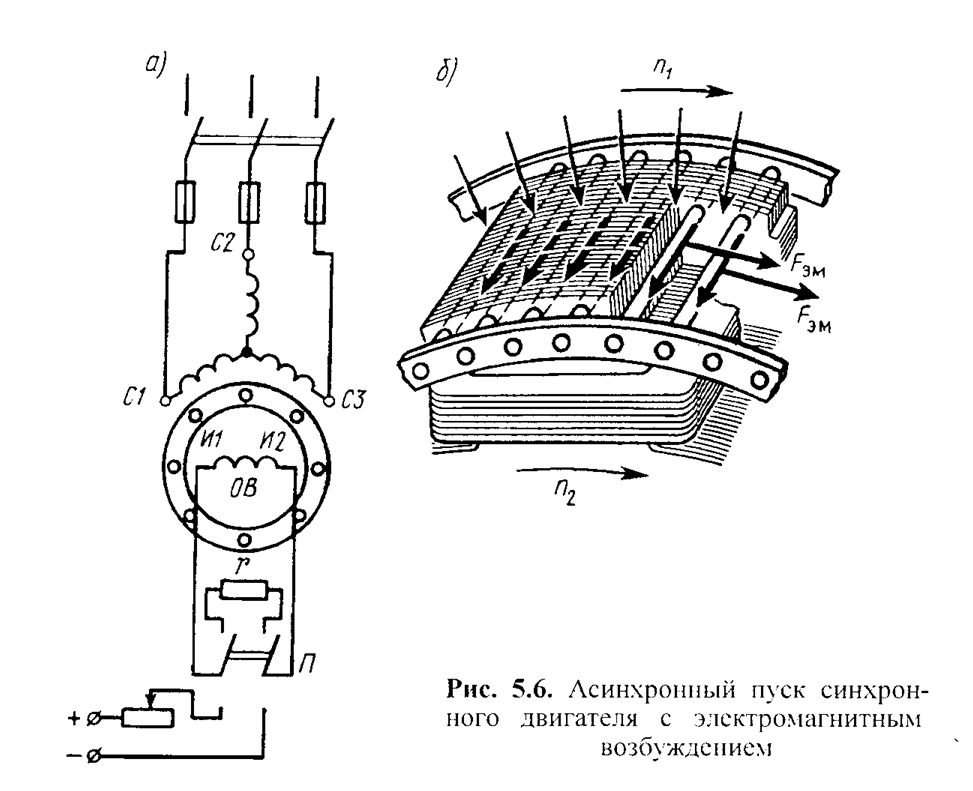
• TENV (Totally Enclosed Non-Ventilated Motor) – «закрытого типа без охлаждения». Эти электродвигатели также используются в подъемно-транспортном оборудовании складов, если есть внешний источник, создающий воздушный поток для охлаждения двигателя;
• TEBC (Totally Enclosed Blower-Cooled Motor) – «охлаждаемый обдувом». Эти двигатели комплектуют собственным вентилятором, но расположенным и управляемым снаружи. Электродвигатели типа TEBC обычно применяют в оборудовании высокой мощности: в подъемных кранах, лебедках и т. п. или в оборудовании, работающем с переменной скоростью, где электродвигатель иногда может работать с частотой вращения, близкой к нулю;
• EPFC (Explosion Proof Fan Cooled Motor) – «во взрывозащищенном исполнении с вентиляторным
охлаждением». Используются в условиях высокого содержания в воздухе горючих и взрывоопасных элементов, например, паров бензина, других нефтепродуктов, аммиака, угольной пыли и проч.
Используются в условиях высокого содержания в воздухе горючих и взрывоопасных элементов, например, паров бензина, других нефтепродуктов, аммиака, угольной пыли и проч.
Возможности применения любого асинхронного электродвигателя расширяются благодаря использованию электропривода с частотным регулированием (VFD). Асинхронные электродвигатели традиционной конструкции работают с постоянной частотой. Электропривод с частотным регулированием позволяет менять скорость двигателя и всей машины. В складском подъемно-транспортном оборудовании электроприводы с частотным регулированием позволяют максимально увеличивать скорость в «пиковые» периоды работы и снижать в другое время, благодаря чему экономится энергия и средства.
Серводвигатели
Эти двигатели занимают свою особую нишу – они работают в оборудовании, где требуется точное регулирование положения и скорости движений. Эти устройства специально разработаны как электродвигатели с якорем малого диаметра, но развивающие высокий крутящий момент.
Серводвигатели оснащают также системами управления по обратной связи: по сигналам тахометра, датчиков линейных перемещений и аналого-цифрового преобразователя (АЦП). Благодаря управлению по сигналам от этих приборов увеличивается точность движений и регулирования скорости машин. Серводвигатели применяют в оборудовании и системах, где требуется высокая точность движений: в роботизированном оборудовании, штабелерах и подобных складских машинах. Электродвигатели этого типа применяют также в оборудовании и системах, где необходима большая точность синхронизации – в машинах, выполняющих установку (позиционирование) грузов на стеллажах автоматизированных складов.
Линейные асинхронные электродвигатели
Линейные асинхронные электродвигатели – новинка в отрасли складского подъемно-транспортного оборудования. Они позволяют значительно увеличить скорость движений машин при замечательной их повторяемости и точности. Линейный асинхронный двигатель генерирует магнитное поле, которое перемещает ползун (пластину) в двигателе. Обычно ползун прикрепляется к объекту, который должен передвигаться магнитным полем: например, в сортировочных машинах ползун электродвигателя соединен с подвижным лотком распределителя.
Линейный асинхронный двигатель генерирует магнитное поле, которое перемещает ползун (пластину) в двигателе. Обычно ползун прикрепляется к объекту, который должен передвигаться магнитным полем: например, в сортировочных машинах ползун электродвигателя соединен с подвижным лотком распределителя.
В такой конструкции нет деталей, которые бы изнашивались. Линейные асинхронные электродвигатели обеспечивают точность движений до 0,0335 мм на 1 м перемещения, т. е. позволяют выполнять прецизионные работы. Насколько уникальна такая способность устройств, иллюстрирует тот факт, что толщина человеческого волоса составляет около 0,09 мм, т. е. в три раза больше! Скорость работы линейных асинхронных электродвигателей очень высокая – до 5 м/с, а следовательно, длительность рабочих циклов у них небольшая и производительность на высочайшем уровне. Скорость перемещения ползуна на разных отрезках в течение одного цикла можно менять, а можно задавать пошаговое перемещение – это очень полезное качество для некоторых автоматических машин.
Мотор-ролики
Линейные асинхронные электродвигатели – не единственная инновация в области электрических силовых агрегатов. В последнее время в конвейерах все шире стали применять мотор-ролики (MDR – Motor Driven Roller). Еще два года назад на выставке оборудования по транспортировке материалов и логистике ProMat в Чикаго лишь несколько фирм представили конвейеры с приводом от мотор-роликов, зато в экспозиции в январе 2007 г. в ассортименте почти каждой фирмы, предлагающей конвейеры, были модели с мотор-роликами.
В Соединенных Штатах конвейеры с приводом от мотор-роликов впервые использовала почтовая служба. Конструкция их проста. Внутри ведущего ролика устанавливается миниатюрный электродвигатель постоянного тока, работающий от напряжения 24 В, и редуктор. В обычных конвейерах один мотор-ролик приходится на 9 обычных роликов.
По словам специалистов, если конвейер перемещает грузы непрерывным потоком, привод от наружных электродвигателей более экономичен. Конвейеры с мотор-роликами рентабельны и используются в основном в тех случаях, когда надо накапливать поступающие грузы на конвейере, а затем перемещать их дальше либо когда требуется разделять поток грузов на группы и перемещать грузы группами.
Конвейеры с мотор-роликами рентабельны и используются в основном в тех случаях, когда надо накапливать поступающие грузы на конвейере, а затем перемещать их дальше либо когда требуется разделять поток грузов на группы и перемещать грузы группами.
У мотор-роликов целый «букет» преимуществ. Уровень шума от конвейеров, оснащенных мотор-роликами, значительно ниже, чем от обычных конвейеров. Они позволяют экономить энергию: не только благодаря более высокому к.п.д. мотор-роликов, но и потому, что конвейер работает только тогда, когда надо. Еще одно преимущество – более высокий уровень систем управления мотор-роликами. В настоящее время выпускаются конвейеры с мотор-роликами, развивающие скорость до 90 м/мин, а если поток грузов уменьшился, можно снизить скорость до 30 м/мин, уменьшив таким образом износ деталей конвейера и энергопотребление. Наконец, мотор-ролик практически не нуждается в техобслуживании. Поскольку он работает лишь тогда, когда надо, его ресурс продляется на годы. Когда электродвигатель выйдет из строя, мотор-ролик заменяют другим практически без остановки конвейера.
В чем разница синхронный двигатель. Сравнение синхронных и асинхронных двигателей. Отличие в характеристиках электродвигателей
Принципиальное отличие синхронного двигателя от асинхронного заключается в исполнении ротора. Последний у синхронного двигателя представляет собой магнит, выполненный (при относительно небольших мощностях) на базе постоянного магнита или на основе электромагнита. Поскольку разноименные полюсы магнитов притягиваются, то вращающееся магнитное поле статора, которое можно интерпретировать как вращающийся магнит, увлекает за собой магнитный ротор, причем их скорости равны. Это объясняет название двигателя — синхронный.
В заключение отметим, что в отличие от асинхронного двигателя, у которого обычно не превышает 0,8…0,85, у синхронного двигателя можно добиться большего значения и сделать даже так, что ток будет опережать напряжение по фазе. В этом случае, подобно конденсаторным батареям, синхронная машина используется для повышения коэффициента мощности.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Т.е это достаточно дешевый двигатель, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компрессоры, вентиляторы) ими легко управлять.
Отличить можно по кол-ву оборотов на табличке (если там явно не указан тип машины), у асинхронного не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
Синхронные двигатели управляются также сложно как и асинхронные, т. к. требуют управления частотой подводимого напряжения. Они имеют абсолютно жесткую механическую характеристику, это означает, что как бы не менялась нагрузка на валу двигателя, он будет иметь одну и ту же частоту вращения. Естественно, нагрузка должна меняться в разумных пределах, есть значение критического момента нагрузки, при котором двигатель «выпадает» из синхронного режима, что чревато его поломкой. К основным недостаткам относится то, что обмотку возбуждения необходимо питать постоянным током, также наличие скользящего контакта «щетка-контактное кольцо», сложность пуска.
к. требуют управления частотой подводимого напряжения. Они имеют абсолютно жесткую механическую характеристику, это означает, что как бы не менялась нагрузка на валу двигателя, он будет иметь одну и ту же частоту вращения. Естественно, нагрузка должна меняться в разумных пределах, есть значение критического момента нагрузки, при котором двигатель «выпадает» из синхронного режима, что чревато его поломкой. К основным недостаткам относится то, что обмотку возбуждения необходимо питать постоянным током, также наличие скользящего контакта «щетка-контактное кольцо», сложность пуска.
Чаще всего синхронные машины используют в качестве генераторов, вообще подавляющее большинство генераторов — синхронные, начиная с тех, которые устанавливаютс на автомобилях, и заканчивая теми, которые стоят на АЭС. Из всех других они наиболее надежны, имеют наибольший КПД, проще других в обслуживании.
КПД машины не зависит от косинуса фи электрической машины. КПД зависит восновном только от потерь в обмотке (потери в меди), в магнитопроводе (потери в стали), механических потерь и дополнительных потерь.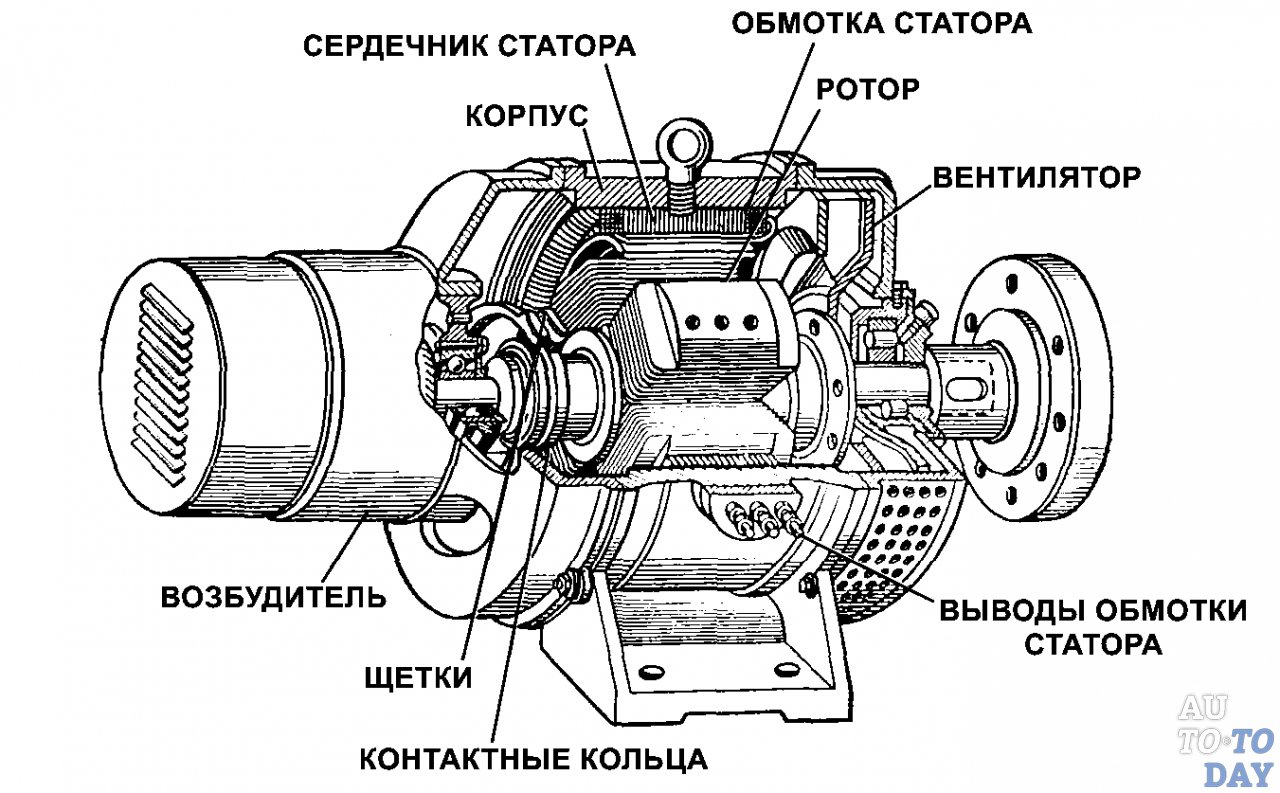 Также КПД машины зависит от ее нагрузки, при этом максимум (КПД) наблюдается в точке, когда потери в стали и в меди равны, как правило это наблюдается, когда нагрузка составляет 75-80% от номинальной мощности машины.
Также КПД машины зависит от ее нагрузки, при этом максимум (КПД) наблюдается в точке, когда потери в стали и в меди равны, как правило это наблюдается, когда нагрузка составляет 75-80% от номинальной мощности машины.
Учитывая особенности производства электрических машин имеем что с ростом мощности выпущенной машины, потери растут не пропорционально, поэтому мощные электрические машины могут иметь КПД достигающий 99%.
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока.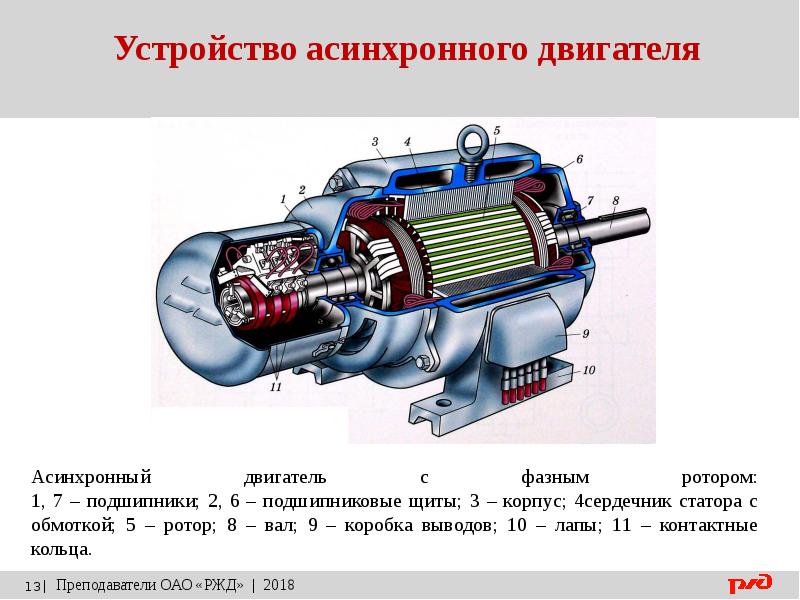 В данной статье речь пойдет о первом виде – электродвигателе переменного тока
В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б. С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление R добав.
Трёхфазные машины переменного тока. Они есть двух видов — асинхронные и синхронные. В этой статье рассказывается в чём сходство и различие между машинами обоих типов и область их применения.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор . В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке.Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником. На время пуска они переключаются в звезду.
- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
Пуск синхронных электромашин
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.
- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
Особенности и применение разных видов электродвигателей
У каждого типа двигателей есть достоинства и недостатки по сравнению с другими. Это определяет область их применения. Применение разных типов электромашин зависит от их особенностей конструкции и принципа действия.
Достоинства и использование асинхронных электродвигателей
Такие машины имеют достоинства перед синхронными аппаратами:
- простота конструкции и низкая цена; аппараты с фазным ротором позволяют регулировать скорость вращения и осуществлять плавный пуск без использования преобразователей частоты;
- большое разнообразие мощностей — от нескольких ватт до десятков киловатт.
Кроме достоинств есть недостатки:
- падение скорости вращения при росте нагрузки;
- более низкий КПД и большие габариты, чем у синхронных аппаратов той же мощности;
- кроме активной, такие аппараты потребляют реактивную (индуктивную) мощность, что ведёт к необходимости устанавливать компенсаторы или дополнительно оплачивать реактивную электроэнергию.
Используются такие машины практически везде, где необходимо приведение в движение механизма и есть трёхфазное напряжение 380 вольт.
Применение синхронных машин
- Регулировка путём изменения тока возбуждения cos φ. Это позволяет уменьшить ток потребления, габариты и сечение подводящего кабеля, а также увеличить КПД. Кроме того, такие аппараты используются в качестве компенсаторов реактивной мощности.
- Менее чувствительны к колебаниям напряжения и обладают большей перегрузочной способностью, особенно к ударным нагрузкам. Способность к превышению мощности повышается путём перевозбуждения обмоток ротора. Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах.
- Частота вращения не меняется при изменения нагрузки. Поэтому синхронные машины применяются в прецизионных станках в металлургии, машиностроении и деревообатывающей промышленности.
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.
Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым. Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного. Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит. Вращающийся магнит, создающий статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая. Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора. В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
Классификация электродвигателей
Основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.
Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
- самая высокая надежность;
- самый большой ;
- простота обслуживания.
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.
Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Синхронный и асинхронный двигатель. Что такое синхронный двигатель
Синхронный двигатель, в отличии от своего асинхронного собрата, имеет постоянную частоту вращения при разнообразных нагрузках. Часто такие приборы применяют для приводов машин, которые работают с постоянной неизменной скоростью (например, компрессоры, вентиляторы, насосы и прочее).
Как устроен синхронный двигатель?
В статоре такого электроприбора имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения. Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле. Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Синхронный двигатель и его разновидности
В основном все отличия в конструктивном исполнении такого устройства — это модификации вращающейся детали. Ротор синхронной машины может быть с явно выраженными полюсами (его обычно называют «явнополюсный»), и с неявно выраженными полюсами (так называемый «неявнополюсный»). Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения. Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Синхронный двигатель и принцип его работы
Магнитное поле статора, которое вращается, намагничивает ротор. Синхронный двигатель с постоянными магнитами имеет разное электромагнитное сопротивление по поперечной и продольной осям полюсов. Силовые линии у магнитного поля обмотки статора начнут изгибаться, потому что они будут как бы стремиться найти пути с наименьшим сопротивлением. Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Синхронный двигатель и его особенности
Нельзя не упомянуть о некоторых специфических моментах. Например, о том, что у таких машин нет пускового момента. Это происходит по той причине, что из-за своей инертности ротор просто не успевает развить нужное количество оборотов. Поэтому в настоящее время часто применяют асинхронный пуск таких двигателей.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
В принципе, его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока (в этом мы разберёмся позже). А пока рассмотрим основное строение данного типа двигателя.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – –), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работыОсновными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также моторы отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть .
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера примененияШирокое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Чем синхронный двигатель от асинхронного отличается такой вопрос часто задают на различных форумах.
Чем синхронный от асинхронного двигателя отличается
Основное отличие в том, что у асинхронного двигателя скорость вращения ротора всегда меньше, скорости вращения магнитного поля в то время как у синхронного же двигателя скорость ротора или равна или в особенных случаях конструкции кратна скорости ротора.
А так много отличий на самомм деле, но это самые основные из-за них они собственно говоря так и называются.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Т.е это достаточно дешевый двигатель/, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы) ими легко управлять.
Отличить можно по количеству оборотав на табличке (если там явно неуказан тип машины), у ассинхронников не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
Какие бывают двигатели? Типы электродвигателей. Асинхронные двигатели
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.
Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.
Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.
Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Разница между синхронным и асинхронным двигателем — Разница Между
Разница Между 2021
Ключевая разница: Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока. В синхронном электродвигателе вращение вала синхронизировано с
Содержание:
Ключевая разница: Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока. В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Асинхронный двигатель — это электродвигатель переменного тока, в котором электрический ток в роторе создается электромагнитной индукцией от магнитного поля обмотки статора. Синхронные и асинхронные двигатели — это два разных типа электродвигателей переменного тока. Электродвигатели переменного тока — это электродвигатели, приводимые в действие переменным током (AC). Двигатель переменного тока обычно состоит из двух основных частей: внешнего стационарного статора и внутреннего ротора. Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока.Внешний стационарный статор имеет катушки, которые питаются переменным током. Это тогда производит вращающееся магнитное поле. Внутренний ротор прикреплен к выходному валу, который создает второе вращающееся магнитное поле. Магнитное поле ротора может создаваться постоянными магнитами, магнитной индуктивностью или электрическими обмотками постоянного или переменного тока.
В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя. Эти электромагниты создают магнитное поле, которое вращается во времени вместе с колебаниями тока в линии. С другой стороны, ротор с постоянными магнитами или электромагнитами вращается в соответствии с полем статора с той же скоростью. Это обеспечивает второе синхронизированное вращающееся магнитное поле.
Асинхронный двигатель — это электродвигатель переменного тока, в котором электрический ток в роторе создается электромагнитной индукцией от магнитного поля обмотки статора. Асинхронный двигатель также известен как асинхронный двигатель. Ротор в асинхронном двигателе может быть намотанного или короткозамкнутого типа.
В отличие от больших синхронных двигателей, асинхронный двигатель не требует механической коммутации, раздельного возбуждения или самовозбуждения для энергии, передаваемой от статора к ротору.Основное различие между синхронными и асинхронными двигателями состоит в том, что синхронный двигатель вращается в точной синхронизации с частотой линии. Кроме того, синхронный двигатель не зависит от индукции тока для создания магнитного поля ротора. Асинхронный двигатель, с другой стороны, требует «проскальзывания», чтобы вызвать ток в обмотке ротора, что означает, что ротор должен вращаться немного медленнее, чем чередование переменного тока.
Сравнение между синхронным и асинхронным двигателем:
Синхронный двигатель | Индукционный двигатель | |
Описание | Синхронный электродвигатель представляет собой электродвигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой тока питания. | Асинхронный или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается посредством электромагнитной индукции от магнитного поля обмотки статора. |
содержать | Многофазные электромагниты переменного тока на статоре двигателя | |
Синхронная скорость | Работать на оборотах = 120f / p | Работать на скорости менее синхронной (об / мин = 120f / p — скольжение) |
Постоянное возбуждение | Синхронные двигатели требуют подачи постоянного тока на обмотки ротора | Асинхронные двигатели не требуют подачи постоянного тока на обмотки ротора. |
Источник постоянного тока | Синхронные двигатели требуют источника питания постоянного тока для возбуждения ротора. | Асинхронные двигатели не требуют источника питания постоянного тока для возбуждения ротора. |
Роторное возбуждение | Синхронные двигатели требуют контактных колец и щеток для подачи возбуждения ротора. | Асинхронные двигатели не требуют контактных колец, но некоторые асинхронные двигатели имеют их для плавного пуска или управления скоростью. |
Обмотки ротора | Синхронные двигатели требуют обмотки ротора | Асинхронные двигатели чаще всего изготавливаются с токопроводящими стержнями в роторе, которые замыкаются вместе на концах, образуя «беличную клетку». |
Пусковой механизм | Синхронные двигатели требуют запуска механизма в дополнение к режиму работы, который действует, когда они достигают синхронной скорости. | Трехфазные асинхронные двигатели могут запускаться простым подачей питания, но однофазные двигатели требуют дополнительной цепи запуска. |
Фактор силы | Коэффициент мощности синхронного двигателя можно отрегулировать так, чтобы он отставал от единицы или опережал | Асинхронные двигатели всегда должны работать с запаздывающим коэффициентом мощности. |
КПД | Синхронные двигатели обычно более эффективны, чем асинхронные двигатели. | Асинхронные двигатели, как правило, менее эффективны, чем синхронные двигатели. |
слип | Синхронные двигатели могут быть сконструированы с постоянными магнитами в роторе, исключая контактные кольца, обмотки ротора, систему возбуждения постоянного тока и возможность регулировки коэффициента мощности. | Асинхронные двигатели содержат скольжение. |
Размер | Синхронные двигатели обычно изготавливаются только с размерами, превышающими 1000 л.с. (750 кВт), из-за их стоимости и сложности. Однако синхронные двигатели с постоянными магнитами и постоянные синхронные двигатели с электронным управлением, называемые бесщеточными двигателями постоянного тока, доступны в меньших размерах. | Меньшие асинхронные двигатели построены и обычно в домашних условиях. |
Используется в | Применения синхронизации, такие как синхронные часы, таймеры в приборах, магнитофоны и точные сервомеханизмы | Трехфазные асинхронные двигатели с короткозамкнутым ротором широко используются в промышленных приводах, потому что они прочные, надежные и экономичные. Однофазные асинхронные двигатели широко используются для небольших нагрузок, таких как бытовая техника, например, вентиляторы. |
Синхронные и асинхронные электродвигатели: в чём разница?
В основе классификации электродвигателей на синхронный и асинхронный тип лежит конструкция мотора и особенности ротора. Так, синхронные функционируют на переменном источнике тока, а частота вращения ротора совпадает с частотой магнитного поля. Электродвигатели асинхронные иногда называют индукционными, и у них частота магнитного поля и вращений ротора не совпадают.
Особенности конструкции синхронных и асинхронных электродвигателей
В синхронных электродвигателях ключевые элементы — это индуктор и якорь. Индуктор располагается на роторе и имеет два полюса — постоянные магниты. Якорь находится на стартере, представлен одной или несколькими обмотками. Благодаря такой конструкции, синхронные двигатели могут функционировать как генераторы и как электродвигатели.
Главные конструктивные элементы асинхронных двигателей — магнитопровод и обмотка. Также в строении устройств есть ротор и статор, и другие элементы, влияющие на прочность и эффективность работы.
Отличия синхронного двигателя от асинхронного
Первое отличие — это соотношение частот вращения ротора с магнитным полем. В синхронных агрегатах эти показатели равные, а в асинхронных — отличаются. Второй тип, к слову, встречается гораздо чаще и имеет больше модификаций. Связано это с явными преимуществами асинхронных электродвигателей:
- невысокая стоимость;
- простота эксплуатации;
- надёжность;
- может работать без преобразователей, на собственных ресурсах сети.
Но асинхронные двигатели не лишены и недостатков:
- имеют большой пусковой ток и маленький пусковой момент;
- у них пониженный коэффициент мощности;
- низкая управляемость.
Среди достоинств синхронных устройств выделим следующие:
- стабильность вращения независимо от нагрузок на ротор;
- не сильно чувствительны к перепадам напряжения.
Недостатками синхронных двигателей можно считать сложность конструкции и пуска в ход ротора.
Из всего вышесказанного можно сделать вывод, что асинхронные типы целесообразно использовать для двигателей, мощностью от 100 кВт. В остальных случаях проще обойтись асинхронными агрегатами.
Асинхронные двигатели — MirMarine
Асинхронными называются двигатели, у которых число оборотов ротора отстает от скорости вращения магнитного поля статора при прохождении в его обмотках трехфазного тока. При прохождении в обмотках статора трехфазной машины трехфазного тока возникает вращающееся магнитное поле, под действием которого в роторе индуктируется электрический ток. В результате взаимодействия вращающегося магнитного поля статора стоками, индуктируемыми в проводниках ротора, возникает механическое усилие, действующее на проводник с током, которое и создает вращающий момент, приводящий в движение ротор. При этом число оборотов ротора у асинхронного двигателя всегда меньше числа оборотов вращающегося магнитного поля статора за счет скольжения ротора, которое у современных двигателей составляет примерно 2—5%.
Таким образом, асинхронный двигатель получает энергию, подводимую к ротору вращающимся магнитным потоком (индуктивно) в отличие от двигателей постоянного тока, у которых энергия подводится по проводам.
Асинхронные двигатели в отличие от синхронных возбуждаются переменным током.
Асинхронный двигатель, так же как и синхронный, состоит из двух основных частей: статора с фазными обмотками, по которым проходит трехфазный переменный ток, и ротора, ось которого уложена в подшипниках. Ротор может быть коротко-замкнутым и фазным (рис. 175).
Короткозамкнутый ротор(рис. 175, в) представляет из себя цилиндр, по окружности которого параллельно его оси расположены проводники, замкнутые между собой с обеих сторон ротора кольцами (в виде беличьего колеса).
Асинхронный двигатель с таким ротором называется короткозамкнутым. К недостаткам их относятся малый пусковой момент и большой ток в обмотках статора при пуске. Если хотят увеличить пусковой момент или уменьшить пусковой ток, применяют асинхронные двигатели с фазным ротором (рис. 175,г).
У этих двигателей на роторе размещают такую же обмотку, как и на статоре. При этом концы обмоток соединяют с контактными кольцами (рис. 175, д), расположенными на валу двигателя. Контактные кольца при помощи щеток соединяются с пусковым реостатом. Для пуска двигателя в питающую сеть включают статор, после чего постепенно выводят из цепи ротора сопротивление пускового реостата. Когда двигатель пущен в ход, контактные кольца при помощи особых приспособлений замыкаются накоротко, а щетки поднимаются над кольцами. Остановка электродвигателя производится простым выключением рубильника. После остановки двигателя необходимо опустить щетки и разомкнуть контактные кольца. На рис. 176 показан продольный разрез асинхронного двигателя с фазным ротором. На валу 1 двигателя имеется механизм для замыкания контактных колец 8 и подъема щеток ручкой 7. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
Пуск в ход электродвигателя с короткозамкнутым ротором может быть осуществлен непосредственным включением рубильника на полное рабочее напряжение сети (способ прямого пуска.) Однако вследствие резкого возрастания индуктируемой э. д. с. и величины пускового тока напряжение в сети в пусковой момент снижается, что отрицательно сказывается на работе приводного двигателя и других потребителей, питающихся от этой сети. В случае большой величины пускового тока, для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником или включением электродвигателя через пусковое сопротивление (или автотрансформатор) в цепи статора.
Остановка электродвигателя производится выключением рубильника. После остановки электродвигателя пусковой реостат или автотрансформатор полностью вводится. Скорость вращения асинхронных двигателей регулируют, изменяя сопротивление реостата, включенного в цепь ротора (у электродвигателей с фазным ротором) и переключением статорных обмоток для изменения числа пар полюсов (у электродвигателей с коротко-замкнутым ротором).
Изменение направления вращения асинхронных электродвигателей достигается изменением направления вращающегося магнитного поля статора путем переключения любых двух из трех фаз обмотки статора (с помощью проводов, соединяющих зажимы статорной обмотки с сетью) при помощи обычного двухполюсного переключателя.
Асинхронные двигатели
- просты по конструкции
- обладают по сравнению с двигателями постоянного тока меньшими габаритами и весом, вследствие чего он значительно дешевле
- более надежны в эксплуатации
- требуют меньшего внимания при обслуживании из-за отсутствия у них вращающегося коллектора и щеточного аппарата
- обладают более высоким к. п. д.
- аппаратура управления ими значительно проще и дешевле, чем у двигателей постоянного тока
- Асинхронные двигатели работают без искрообразования, которое возможно в машинах постоянного тока с нарушенной коммутацией, поэтому они более безопасны в пожарном отношении.
Перечисленными основными преимуществами асинхронных двигателей объясняется современная тенденция повсеместного внедрения переменного тока на морских судах. Следует отметить, что в промышленности асинхронные двигатели давно завоевали господствующее положение по сравнению с другими типами электродвигателей. Асинхронные двигатели строятся мощностью от долей киловатта до многих тысяч киловатт. На судах морского флота в основном применяются асинхронные двигатели с короткозамкнутым ротором, которые выпускаются в водозащищенном и брызгозащищенном исполнении и рассчитаны на напряжение 380/220 в.
Похожие статьи
Основное различие между синхронным и асинхронным двигателем
В чем разница между синхронным и асинхронным двигателем (асинхронным двигателем)Электродвигатели — это машины, которые преобразуют электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть предназначены для работы на переменном (AC) или постоянном (DC) токе. Двигатели переменного тока подразделяются на два типа; Синхронные двигатели и асинхронные двигатели. Оба они имеют некоторые общие черты, например, в конструкции, но совершенно разные по принципу действия и производительности.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и то, как они работают. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, относящуюся к работе однофазных и трехфазных двигателей переменного тока.
Как работает двигатель переменного тока?Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу магнитного поля, действующего на проводник с током, который испытывает механическую силу.Где статор генерирует статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея вращательного магнитного поля RMF. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче входного переменного тока. Это магнитное поле вращается вокруг ротора.
Ротор, сделанный из обмоток или проводников с замкнутым контуром, пропускает ток либо посредством индукции, либо через внешний источник тока, генерирующий собственное магнитное поле.Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока. если двигатель переменного тока имеет скольжение или существует разница между скоростью возбуждения статора и ротором, двигатель называется асинхронным двигателем.Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателях BLDC (бесщеточный постоянного тока), шаговых двигателях и серводвигателях.
Связанные сообщения:
Синхронный двигательКак следует из названия, синхронный двигатель имеет ротор, который предназначен для вращения с той же скоростью, что и его вращающееся магнитное поле статора, называемой синхронной скоростью .
Статор генерирует вращающееся магнитное поле при подаче переменного тока.Ротор может быть спроектирован для создания собственного магнитного поля с использованием внешнего источника постоянного тока через контактные кольца или постоянного магнита .
Ротор предназначен для создания магнитных полюсов, равных полюсам статора или целых кратных полюсов. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется с вращающимся магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не запускается сразу с синхронной скоростью (вращательное магнитное поле).Поэтому для обеспечения пускового момента используется дополнительная обмотка, называемая « демпферная обмотка ». Во время запуска он действует как асинхронный двигатель. Таким образом, предполагается, что синхронные двигатели не самозапускающиеся , им нужен дополнительный пусковой механизм.
Это может быть двигатель с раздельным возбуждением или без возбуждения, т.е. первый требует отдельного источника постоянного тока, возбуждает обмотки ротора и генерирует магнитное поле, в то время как последний описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора. и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты питания и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменить скорость синхронного двигателя, необходимо изменять частоту питания. Это достигается за счет использования частотно-регулируемого привода (VFD).
Связанные сообщения:
Асинхронный двигательНазвание асинхронного двигателя предполагает, что скорость ротора асинхронна со скоростью вращения магнитного поля статора.Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между скоростью статора и ротора.
Ротор асинхронного двигателя представляет собой короткозамкнутый ротор с обмоткой. Ротор с короткозамкнутым ротором построен с использованием тяжелых медных стержней, соединенных на конце с помощью токопроводящего кольца, которое электрически закорачивает их вместе. Ротор с обмоткой состоит из нескольких обмоток поверх многослойного стального сердечника.
Вращающееся магнитное поле статора вызывает индуцированный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противодействует причине, которая его порождает, и пытается устранить ее, догоняя скорость статора RMF (синхронную скорость). При этом ротор вращается в направлении RMF статора. Асинхронный двигатель также известен как асинхронный двигатель , поскольку он работает по принципу индукции.
Асинхронный двигатель никогда не может работать на синхронной скорости, вместо этого она всегда ниже, чем синхронная скорость, и это зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если в случае, если он работает с синхронной скоростью, это означает, что ротор магнитно заблокирован и между полем статора и ротора нет разницы. Следовательно, не будет магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать с меньшей скоростью, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет наведенному току проходить через медные шины. В то время как заведенный ротор позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Пускателе двигателя». Дело в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного подключения переменного резистора к обмоткам ротора с помощью контактных колец.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое изменяется в зависимости от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанное сообщение:
Различия между синхронным двигателем и асинхронным двигателемВ следующей таблице показаны основные различия между синхронным двигателем и асинхронным (асинхронным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| Синхронный двигатель — это тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это тип двигателя переменного тока, который работает со скоростью, меньшей, чем синхронная скорость. |
| Он работает по принципу магнитной блокировки между полем ротора и статора. | Он работает по принципу электромагнитной индукции между статором и ротором. |
| Нет скольжения, т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе есть скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты питания и количество полюсов статора. N s = 120 f / P | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, s. это всегда меньше синхронной скорости. N = N с (1-с) N |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели самозапускаются и не требуют дополнительных механизмов. |
| Ротор требует дополнительного источника тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронному двигателю с независимым возбуждением требуется дополнительный источник постоянного тока для питания его обмотки ротора. | Не требует дополнительных исходников. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Не требует контактных колец, однако, намотанный тип может использовать контактные кольца для управления скоростью. |
| Скорость двигателя регулируется только путем изменения частоты питания с помощью частотно-регулируемого привода. | Скорость двигателя можно регулировать с помощью переменного сопротивления ротора, а также устройств VFD. |
| Источник входного напряжения не изменяет скорость или крутящий момент синхронного двигателя. | Источник входного напряжения можно использовать для изменения крутящего момента и скорости двигателя. |
| Колебания основного напряжения питания не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Начальная стоимость больше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Операция сложная. | Операция проста и удобна для пользователя. |
| Если предлагают высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью ЧРП. | Работать на малых оборотах довольно сложно. |
| Лучше всего работает на более низких оборотах, обычно ниже 300 об / мин. | Лучше всего подходит для работы на скорости выше 600 об / мин. |
| Он может работать с отстающим, опережающим или единичным коэффициентом мощности, регулируя его возбуждение. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Он также может одновременно использоваться для коррекции коэффициента мощности, используя его в качестве опережающего коэффициента мощности. | Его нельзя использовать для корректировки коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, резкое изменение нагрузки вызовет колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи заключается в том, что синхронные двигатели эффективны, но дороже и используются для приложений со сверхнизкими оборотами, предлагая при этом функцию коррекции коэффициента мощности. С другой стороны, асинхронные двигатели используются для высоких оборотов с регулируемой скоростью, будучи недорогими и простыми в эксплуатации.
Связанный пост об электрических двигателях.
16 Основные различия между синхронными и асинхронными двигателями
В этом посте мы узнаем разницу между двумя типами двигателей переменного тока (AC). Эти два электродвигателя переменного тока —
- Синхронный двигатель и
- Асинхронный двигатель.
Если вы готовитесь к экзамену, виве или собеседованию, вам будут заданы вопросы — синхронные или асинхронные двигатели. Это очень важные темы в электротехнике.
Вас часто просят сравнить эти два типа двигателей.
Здесь я сравниваю синхронный двигатель и асинхронный двигатель с их характеристиками, функциями, приложениями и примерами.
Примечание. Асинхронный двигатель называется «Асинхронный двигатель ».
Разница между синхронными и асинхронными двигателями
Давайте рассмотрим сравнение обоих двигателей переменного тока в табличной форме.
| # | Содержание | Синхронный двигатель | Асинхронный двигатель |
| 01 | Определение [Что такое синхронные и асинхронные двигатели] | Электромагнитный двигатель, который преобразует электрическую энергию в механическую работу с постоянной скоростью и называется «синхронным двигателем». | Электромагнитный двигатель, преобразующий электрическую энергию в механическую работу с переменной скоростью, называется «асинхронным двигателем». |
| 02 | Двигатель Скорость | Синхронный двигатель работает с синхронной скоростью. | Асинхронный двигатель работает с несинхронной скоростью. |
| 03 | Принцип | Синхронный двигатель работает по принципу «магнитной блокировки». | Асинхронный двигатель работает по принципу «электромагнитной индукции». |
| 04 | Исходное положение | Это не самозапускающийся двигатель. | Это самозапуск двигателя. (особенно трехфазный асинхронный двигатель) |
| 05 | Подключенное питание (переменного и постоянного тока) | Он состоит из двух основных частей — статора и ротора. Статор подключается к трехфазному источнику переменного тока, а ротор подключается к источнику постоянного тока соответственно. | Точно так же он также состоит из двух основных частей — статора и ротора. Единственный статор подключается к трехфазному источнику переменного тока. |
| 06 | Система возбуждения (источник постоянного тока для ротора) | Синхронному двигателю требуется система возбуждения постоянного тока (или первичный двигатель) для запуска двигателя (т. Е. Для вращения ротора). | Асинхронный двигатель не требует системы возбуждения для запуска двигателя. |
| 07 | Конструкция | Конструкция синхронного двигателя очень сложна. | Конструкция асинхронного двигателя относительно проста. |
| 08 | Относительное движение | Для синхронного двигателя относительное движение не требуется между статором и ротором. | Для асинхронного двигателя требуется относительное движение между статором и ротором. |
| 09 | Скольжение (зависимость магнитного поля от скорости ротора) | В синхронном двигателе возникает нулевое скольжение (S = 0). | В асинхронном двигателе происходит различное скольжение. |
| 10 | Скорость двигателя (об / мин) | Он работает от 150 до 1800 об / мин . синхронной скорости. | Работает менее 1500 об / мин. синхронная скорость. |
| 11 | Коэффициент мощности | Он имеет единичный, запаздывающий или опережающий коэффициент мощности. В основном работает на единичном коэффициенте мощности. | Имеет только отстающий коэффициент мощности. |
| 12 | КПД (соотношение выходной и входной мощности) | Синхронный двигатель имеет более высокий КПД по мощности благодаря единице или опережающему коэффициенту мощности. | Асинхронный двигатель менее эффективен, чем синхронный двигатель. |
| 13 | Использует | Используется для коррекции коэффициента мощности, обслуживания нагрузки с постоянной скоростью, регулирования напряжения линии электропередачи и т. Д. | В основном используется в промышленности. |
| 14 | Стоимость | Этот двигатель дороже асинхронного двигателя. | Этот двигатель дешевле синхронного двигателя. |
| 15 | Техническое обслуживание | Требуется максимальное техническое обслуживание. | Требуется минимальное обслуживание. |
| 16 | Пример | Вентилятор, нагнетательный вентилятор, осушитель — это пример синхронного двигателя. | Конвейерная лента, прокатный стан, смеситель, измельчитель являются примером асинхронного двигателя. |
Это все о различии между синхронными и асинхронными двигателями. Также рассмотрены преимущества и недостатки этих двух двигателей переменного тока.
Надеюсь, это поможет вам при подготовке к экзамену или собеседованию. Если у вас есть какие-либо вопросы, напишите мне в разделе комментариев ниже.
Связанные сравнения:
Спасибо за чтение!
Если вы цените то, что я делаю здесь, в DipsLab, вам следует принять во внимание:
DipsLab — это самый быстрорастущий и пользующийся наибольшим доверием сайт сообщества инженеров по электротехнике и электронике.Все опубликованные статьи доступны БЕСПЛАТНО всем.
Если вам нравится то, что вы читаете, пожалуйста, купите мне кофе (или 2) в знак признательности.
Это поможет мне продолжать оказывать услуги и оплачивать счета.
Я благодарен за вашу бесконечную поддержку.
Я получил степень магистра в области электроэнергетики. Я работаю и пишу технические руководства по ПЛК, программированию MATLAB и электричеству на DipsLab.com портал.
Я счастлив, поделившись своими знаниями в этом блоге. А иногда вникаю в программирование на Python.
Синхронные двигателии асинхронные двигатели
Электродвигателибывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать при поиске лучшего варианта.
Первый шаг в поиске любого двигателя — это определение его источника питания; он питается от постоянного или переменного тока? Это разделит варианты на две большие категории: двигатели переменного тока и двигатели постоянного тока, и исключит любые двигатели, которые не будут работать с вашим источником питания.Однако обе эти категории по-прежнему содержат много типов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (в нашей статье о бесщеточных и щеточных двигателях постоянного тока рассматриваются основные типы двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные и асинхронные двигатели, и в этой статье дается краткое объяснение обоих, а также сравниваются их рабочие характеристики и области применения.
Асинхронные двигатели
Асинхронные двигателисчитаются одними из самых распространенных двигателей переменного тока, используемых сегодня в промышленности.Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени, чтобы их оптимизировать для работы во многих приложениях. Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции для создания механического вращения. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, прочтите наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше.Вообще говоря, цель асинхронных двигателей — пропустить переменный ток через катушки в статоре, которые будут создавать магнитное поле, а частота колебаний источника переменного тока заставит это магнитное поле вращаться. Это вращающееся магнитное поле (RMF) затем будет индуцировать противоположные магнитные поля в роторе (свободно движущийся якорь, прикрепленный к выходному валу) и вызывать полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока напрямую не соответствует количеству оборотов выходного вала.Это явление известно как «проскальзывание» и возникает из-за того, что ротор всегда играет в магнитную игру «догонять» с RMF. Наличие проскальзывания означает, что точное время для асинхронных двигателей затруднено. Как было сказано ранее, эти двигатели можно найти в бытовых приборах, электромобилях и даже в крупном механизированном промышленном оборудовании, поскольку они бывают сотнями скоростей, крутящих моментов, напряжений, размеров и форм. Для получения дополнительной информации об этих машинах, узнайте больше в нашей статье об асинхронных двигателях.
Двигатели синхронные
Синхронные двигатели охватывают основы, недоступные для асинхронных двигателей, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и т. Д. Они достигают этого, соединяя магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора вращает ротор с точной синхронной скоростью.Есть много способов заблокировать эти полюса, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приводятся конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции не обязательно должны получать питание от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели не являются самозапускающимися по своей природе, то есть этим двигателям часто требуется пускатель двигателей для разгона их роторов на полную скорость.Эти пускатели не часто используются с асинхронными двигателями, поскольку они могут запускаться из состояния покоя без первоначального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, даже несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы позволить разработчикам регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, хотя, как правило, дороже асинхронных двигателей, обладают более высоким КПД (> 90%) и являются отличным выбором для дробилок, мельниц, измельчителей и других низкоскоростных и высокомощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока по-прежнему довольно широки, в этой статье дается общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций. Ниже, в таблице 1, показано качественное сравнение некоторых характеристик, общих для асинхронных двигателей и синхронных двигателей, и показаны преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных двигателей и синхронных двигателей.
Характеристики | Асинхронные двигатели | Синхронные двигатели |
Сложность | Простой дизайн | Комплекс |
Самозапускающийся | В целом да | Обычно нет |
Плотность мощности | Среднее значение | Высокая |
КПД | Среднее значение | Высокая |
Регулятор коэффициента мощности | Нет (всегда с запаздыванием) | Да (может опережать и отставать) |
Стоимость | Низкая | Высокая |
Сложность (или ее отсутствие) асинхронных двигателей — лучшее преимущество, которое они имеют перед синхронными конструкциями.Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготавливать / ремонтировать, и требует дополнительных схем, которые необходимо покупать и устанавливать, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно самозапускаются, а синхронные — нет. Это означает, что асинхронным двигателям для эффективной работы требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Плотность мощности — это количество мощности (обычно измеряется в лошадиных силах HP или киловаттах кВт), генерируемых на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя над асинхронным.
Синхронные двигатели в некоторых случаях могут достигать КПД> 90% и, как правило, более энергоэффективны, чем асинхронные двигатели.Эффективность зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает, что при преобразовании электрической энергии в механическую энергию теряется меньше энергии.
Коэффициент мощности — это отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с этим потери. Например: завод должен работать на 1000 кВт (рабочая мощность), а электросчетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая измеряется в киловольт-амперах, или кВА, и составляет используется для выражения энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этого завода составляет 1000/1250 = 0,8 или 80%, что означает, что только 80% тока, подаваемого на завод, используется для полезной работы, а 20% теряется на тепло и другие виды неэффективности. Инженеры могут помочь восстановить эти потери, используя синхронные двигатели, чтобы «опередить» коэффициент мощности или вырабатывать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дано вращение на входе). Часто синхронные двигатели соединяются в тандеме с асинхронными двигателями, чтобы скорректировать индуктивные потери мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По причинам, объясненным ранее, синхронные двигатели дороже в производстве, внедрении, обслуживании и ремонте, чем асинхронные двигатели. Однако можно утверждать, что их способность к экономии энергии и коррекции коэффициента мощности может компенсировать более высокие начальные затраты. Верно ли это, будет в конечном итоге зависеть от конкретных приложений, но это следует учитывать, поскольку общие затраты жизненного цикла всегда должны быть минимизированы в любом проекте.
Сводка
В этой статье представлено краткое сравнение асинхронных двигателей переменного тока и синхронных двигателей. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http: // www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://electricalacademia.com/induction-motor/torque-speed-characteristics-induction-motor/
Прочие изделия из двигателей
Больше от Machinery, Tools & Supplies
Серводвигатели| синхронный / асинхронный
Мы также предлагаем модульную концепцию двигателя для динамических и точных сервоприводов. Выберите лучший серводвигатель для своего применения из трех синхронных и одной асинхронной серий: компактных, малоинерционных и мощных.Двигатели многих размеров и длины гарантируют широкий спектр применения и обеспечивают надежный крутящий момент в состоянии покоя.
Что такое серводвигатели?
Серводвигатель — это двигатель, который позволяет контролировать точное положение вала двигателя, а также скорость и / или ускорение. Для этой цели также используются соответствующие датчики и регулирующая техника. Раньше серводвигатели были вспомогательными приводами, предназначенными для использования в станках.Между прочим, серводвигатель получил свое название от латинского слова servus, что в переводе с английского означает «сервер». Серводвигатели состоят из асинхронного двигателя , синхронного двигателя или двигателя постоянного тока . Таким образом, разница между двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие типы серводвигателей доступны?
Серводвигателиможно разделить на синхронные и асинхронные серводвигатели .Однако двигатель всегда является приводом, который работает с электронным управлением позиционированием, скоростью или крутящим моментом — или их комбинацией. К ним предъявляются очень высокие требования к динамике, диапазонам настройки и / или точности движения. Серводвигатели в основном используются в сочетании с решениями автоматизации и управления , например, в упаковочных машинах.
Что мы предлагаем: синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигателиподходят для использования в приложениях, в которых необходимо перемещать с высокой внешней инерцией в установках и машинах и безопасно управлять ими.Имея это в виду, SEW ‑ EURODRIVE DRL. Серия двигателей предлагает подходящие решения для приводов.
Синхронные серводвигатели
Синхронные серводвигатели — это приводы, в которых ротор синхронно приводится в движение вращающимся полем в статоре с использованием приложенных постоянных магнитов. Синхронный двигатель совершает движение, синхронное с частотой приложенного вращающегося поля .
Эта конструкция привода работает от преобразователя частоты, который обеспечивает соответствующий регулируемый трехфазный ток .Для этого в портфолио SEW ‑ EURODRIVE есть несколько различных конструкций. Оптимизированные серводвигатели серии CMP .. могут быть адаптированы к высокой динамике или высоким нагрузкам в зависимости от области применения . Классические области применения включают пищевую промышленность и производство предметов роскоши, а также строительство, автомобилестроение, упаковку и деревообработку.
Для синхронных серводвигателей серии CM .. упор делается на оптимальные характеристики управления, силу крутящего момента и динамику. Идеальные области применения этих двигателей можно найти в логистике, например, в качестве приводов для порталов X-Y-Z или систем хранения / поиска.
Серводвигатели— синхронные и асинхронные
Мы также предлагаем модульную концепцию двигателя для динамических и точных сервоприводов. Выберите лучший серводвигатель для своего применения из трех синхронных и одной асинхронной серий: компактных, малоинерционных и мощных. Двигатели многих размеров и длины гарантируют широкий спектр применения и обеспечивают надежный крутящий момент в состоянии покоя.
Что такое серводвигатели?
Серводвигатель — это двигатель, который позволяет контролировать точное положение вала двигателя, а также скорость и / или ускорение. Для этой цели также используются соответствующие датчики и регулирующая техника. Раньше серводвигатели были вспомогательными приводами, предназначенными для использования в станках. Между прочим, серводвигатель получил свое название от латинского слова servus, что в переводе с английского означает «сервер». Серводвигатели состоят из асинхронного двигателя , синхронного двигателя или двигателя постоянного тока . Таким образом, разница между двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие типы серводвигателей доступны?
Серводвигателиможно разделить на синхронные и асинхронные серводвигатели . Однако двигатель всегда является приводом, который работает с электронным управлением позиционированием, скоростью или крутящим моментом — или их комбинацией. К ним предъявляются очень высокие требования к динамике, диапазонам настройки и / или точности движения. Серводвигатели в основном используются в сочетании с решениями автоматизации и управления , например, в упаковочных машинах.
Что мы предлагаем: синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигателиподходят для использования в приложениях, в которых необходимо перемещать с высокой внешней инерцией в установках и машинах и безопасно управлять ими. Имея это в виду, SEW ‑ EURODRIVE DRL. серия двигателей обеспечивает подходящие приводные решения.
Синхронные серводвигатели
Синхронные серводвигатели — это приводы, в которых ротор синхронно приводится в движение вращающимся полем в статоре с использованием приложенных постоянных магнитов.Синхронный двигатель совершает движение, синхронное с частотой приложенного вращающегося поля .
Эта конструкция привода работает от преобразователя частоты, который обеспечивает соответствующий регулируемый трехфазный ток . Для этого в портфолио SEW ‑ EURODRIVE есть несколько различных конструкций. Оптимизированные серводвигатели серии CMP .. могут быть адаптированы к высокой динамике или высоким нагрузкам в зависимости от области применения . Классические области применения включают пищевую промышленность и производство предметов роскоши, а также строительство, автомобилестроение, упаковку и деревообработку.
Для синхронных серводвигателей серии CM .. упор делается на оптимальные характеристики управления, силу крутящего момента и динамику. Идеальные области применения этих двигателей можно найти в логистике, например, в качестве приводов для порталов X-Y-Z или систем хранения / поиска.
Разница между синхронным и асинхронным двигателем
Автор: Admin
Синхронный и асинхронный двигатель
Синхронная скорость двигателя переменного тока — это скорость вращения вращающегося магнитного поля, создаваемого статором.Синхронная скорость всегда является целой долей частоты источника питания. Синхронная скорость (n s ) асинхронного двигателя в оборотах в минуту (RPM) определяется как, где f — частота источника переменного тока, а p — количество магнитных полюсов на фазу.
Например, обычный трехфазный двигатель имеет 6 магнитных полюсов, организованных в виде трех противоположных пар, расположенных на расстоянии 120 ° друг от друга по периметру статора, каждый из которых питается от одной фазы источника. В этом случае p = 2, и для частоты сети 50 Гц (частота электросети) синхронная скорость составляет 3000 об / мин.
Скольжение (с) — это изменение скорости вращения магнитного поля относительно ротора, деленное на абсолютную скорость вращения магнитного поля статора, и определяется выражением, где n r — скорость вращения ротора. в об / мин.
Подробнее о синхронных двигателях
Синхронный двигатель — это двигатель переменного тока, в котором ротор обычно вращается с той же частотой вращения, что и поле вращения (поле статора) в машине. Другими словами, двигатель не имеет «скольжения» в обычных условиях эксплуатации, то есть s = 0, и, как следствие, вырабатывает крутящий момент на синхронной скорости.Скорость синхронного двигателя напрямую зависит от количества магнитных полюсов и частоты источника.
Основными конструктивными элементами синхронного двигателя являются обмотка статора, подключенная к источнику переменного тока, который создает вращающееся магнитное поле, и ротор, помещенный в поле статора, питаемое постоянным током от контактных колец, для образования электромагнита.
Ротор представляет собой сплошную стальную отливку цилиндрической формы в случае машины без возбуждения. В двигателях с постоянными магнитами постоянные магниты находятся в роторе.Синхронные двигатели следует ускорить с помощью пускового механизма, чтобы получить синхронизирующую скорость. При достижении синхронной скорости двигатель работает без изменения частоты вращения.
Есть три типа синхронных двигателей; это, электродвигатели сопротивления, электродвигатели с гистерезисом и электродвигатели с постоянными магнитами.
Скорость вращения синхронизирующего двигателя не зависит от нагрузки, если приложен достаточный ток возбуждения. Это позволяет точно контролировать скорость и положение с помощью элементов управления с разомкнутым контуром; они не меняют своего положения при подаче постоянного тока как на обмотки статора, так и на обмотки ротора.Конструкция синхронизирующего двигателя позволяет повысить электрический КПД на низкой скорости, и требуется больший крутящий момент.
Подробнее об асинхронном двигателе
Если скольжение двигателя не равно нулю (), то двигатель известен как асинхронный двигатель. Скорость вращения ротора отличается от скорости вращения поля статора. В асинхронных двигателях скольжение определяет создаваемый крутящий момент. Асинхронный двигатель является хорошим примером асинхронного двигателя, основными компонентами которого являются ротор с короткозамкнутым ротором и статор.В отличие от синхронных двигателей, ротор не питается электричеством.
Синхронный двигатель против асинхронного двигателя
- Ротор асинхронных и синхронных линейных двигателей различаются, где ток подается на ротор в синхронных двигателях, но ротор асинхронного двигателя не питается никаким током.
- Скольжение асинхронного двигателя не равно нулю, а крутящий момент зависит от скольжения, тогда как синхронные двигатели не имеют, т.е.е. скольжение (с) = 0 Двигатели
- Sync имеют постоянную частоту вращения при различных нагрузках, но частота вращения асинхронного двигателя изменяется в зависимости от нагрузки.
Вопрос: Почему асинхронный двигатель называется асинхронным двигателем
Следовательно, асинхронный двигатель называется асинхронным двигателем, потому что для ротора нет отдельного источника возбуждения. Движение ротора зависит от индукции в нем тока. Ротор всегда вращается с меньшей скоростью, чем синхронная скорость, так как он всегда отстает от статора.
Почему он называется асинхронным двигателем?
Асинхронный двигатель получил свое название от того факта, что ток в роторе является индуцированным током из-за вращающегося магнитного поля. Это должно отличать его от двигателей, в которых ток в ротор подается от внешнего источника, например. в двигателе постоянного тока.
Синхронны ли асинхронные двигатели?
Асинхронный двигатель также известен как асинхронный двигатель. Он назван так потому, что никогда не работает с синхронной скоростью. то есть N s = 120f / P.Асинхронный двигатель является наиболее широко используемым двигателем во всех отечественных и коммерческих двигателях.
Почему асинхронные двигатели лучше?
Вал двигателя вращается. Асинхронные двигатели индуцируют магнитное поле внутри ротора, подавая короткий ток в короткозамкнутую клетку. Эта концепция приводит к более высоким потерям в роторе и вызывает более высокий нагрев и меньшую эффективность. В двигателях с более высоким КПД используется медь из-за ее лучшего электромагнитного поведения.
Где используются асинхронные двигатели?
Асинхронный двигатель имеет пассивный ротор, который закорочен постоянно (короткозамкнутый ротор) или временно (см. Ротор с контактным кольцом).Он может производить до нескольких мегаватт и чаще всего используется в качестве стандартного трехфазного двигателя в промышленных приложениях.
Как запускается асинхронный двигатель?
Трехфазный асинхронный двигатель самозапускается. Когда источник питания подключен к статору трехфазного асинхронного двигателя, создается вращающееся магнитное поле, ротор начинает вращаться и запускается асинхронный двигатель.
Какие два типа двигателей?
Типы электродвигателей
- 1).Шунтирующий двигатель постоянного тока.
- 2). Отдельно возбужденный мотор.
- 3). Двигатель серии постоянного тока.
- 4). Двигатель PMDC.
- 5). Составной двигатель постоянного тока.
- 1). Синхронный двигатель.
- 2). Индукционный двигатель.
- 1). Шаговый двигатель.
Каков принцип работы асинхронного двигателя?
Двигатель, работающий по принципу электромагнитной индукции, известен как асинхронный двигатель. Электромагнитная индукция — это явление, при котором электродвижущая сила индуцирует электрический проводник, когда он находится во вращающемся магнитном поле.
Каковы применения асинхронного двигателя?
Однофазные асинхронные двигатели используются в системах с малой мощностью. Эти двигатели широко используются в быту и промышленности. Трехфазный асинхронный двигатель:
- Лифты.
- Краны.
- Подъемники.
- Вытяжные вентиляторы большой мощности.
- Станки токарные приводные.
- Дробилки.
- Маслоэкстракционные заводы.
- Текстиль и т. Д.
Как узнать, является ли двигатель синхронным?
ПРОВЕРКА СИНХРОННОГО ДВИГАТЕЛЯ Ротор можно проверить с помощью омметра на открытую или заземленную обмотку.Чтобы проверить ротор на обрыв обмотки, подсоедините один из выводов омметра к каждому контактному кольцу на валу ротора, Рисунок 17–5.
Какие типы асинхронных двигателей?
Асинхронные двигатели подразделяются на два типа, а именно: однофазные асинхронные двигатели и трехфазные асинхронные двигатели. Как следует из названия, однофазный асинхронный двигатель подключается к однофазному источнику переменного тока, тогда как трехфазный асинхронный двигатель может быть подключен к трехфазному источнику переменного тока.
В чем основное отличие синхронного двигателя от асинхронного?
Различия между синхронным двигателем и асинхронным двигателем
| Синхронный двигатель | Асинхронный двигатель |
|---|---|
| Синхронный двигатель — это тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это тип двигателя переменного тока, который работает со скоростью, меньшей, чем синхронная скорость. |
Почему мы используем синхронные двигатели?
Преимуществами синхронного двигателя являются простота управления коэффициентом мощности и постоянная скорость вращения машины независимо от приложенной нагрузки. Однако синхронные двигатели, как правило, дороже, а двигатель постоянного тока. питание — необходимая особенность возбуждения ротора.
Где используется асинхронный двигатель?
Итак, это все об асинхронном двигателе. Эти двигатели часто используются в 90% приложений по всему миру из-за высокой прочности и надежности. Эти двигатели используются в различных движущихся или вращающихся машинах, таких как лифты, вентиляторы, шлифовальные машины и т. Д.
Что такое двигатель и типы двигателей?
Принцип работы электродвигателя в основном зависит от взаимодействия магнитного и электрического полей.Электродвигатели в основном подразделяются на два типа. Это двигатель переменного тока и двигатель постоянного тока. Двигатель переменного тока принимает переменный ток в качестве входа, тогда как двигатель постоянного тока принимает постоянный ток.
Какие типы двигателей?
Типы электродвигателей
- Бесщеточные двигатели переменного тока. Бесщеточные двигатели переменного тока — одни из самых популярных в управлении движением.
- Электродвигатели постоянного тока с щеткой. В щеточном двигателе постоянного тока ориентация щетки на статоре определяет ток.
- Бесщеточные двигатели постоянного тока.
- Прямой привод.
- Линейные двигатели.
- Серводвигатели.
- Шаговые двигатели.
Почему мы используем стартер DOL?
Пускатели DOL применяются в основном в двигателях, где высокий пусковой ток не вызывает чрезмерного падения напряжения в цепи питания (или где такое высокое падение напряжения допустимо). Пускатели прямого действия обычно используются для запуска небольших водяных насосов, конвейерных лент, вентиляторов и компрессоров.
Какой двигатель используется в промышленности?
Типы двигателей для промышленных электроприводов Шунтирующий двигатель постоянного тока. Накопительный составной двигатель. Трехфазный синхронный двигатель. Асинхронный двигатель с короткозамкнутым ротором.
Какой двигатель используется в генераторе?
Вы можете генерировать переменный ток с помощью двигателя с дробной мощностью. Для удобства двигатель должен быть установлен на плате, как показано, с гнездами 4 мм, позволяющими подсоединять к обмоткам ротора и статора.
Синхронные двигатели — переменного или постоянного тока?
Синхронный электродвигатель — это электродвигатель переменного тока, в котором в установившемся режиме вращение вала синхронизируется с частотой питающего тока; период вращения в точности равен целому числу циклов переменного тока.Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока.
Каковы преимущества асинхронного двигателя?
Асинхронные двигатели — Асинхронные двигатели (IM)
- + Долговечные, прочные и неприхотливые в обслуживании.
- + Оптимизирован для работы с частичной нагрузкой.