


1.Область применения шагового электродвигателя ШД-5Д1МУ3 | ||||
1.1. Шаговые электродвигатели ШД-5Д1МУ3 перспективны для | ||||
использования в станко- и приборостроении, в механизмах вычислительной | ||||
техники и автоматического управления. | ||||
1.2. Предназначены для преобразования электрических импульсов в | ||||
дискретные угловые перемещения высокой точности. | ||||
Условия эксплуатации: температура окружающей среды -45°С — +40°С, | ||||
относительная влажность до 80% при температуре +15°С. | ||||
| 2 Технические
данные шагового электродвигателя ШД-5Д1МУ3 (аналог ДШР-80) | ||||
Номинальное напряжение питания, В | 48 | |||
Напряжение питания постоянного тока при резистивной форсировке, В | 48 (+4,8/-7,2) | |||
Ток в цепи фазовой обмотки в режиме фиксированной стоянки при напряжении | 3 (+0,1/-0,1) | |||
питания 48 В, при трёх включенных фазах, А | ||||
Единичный шаг, градус | 1,5 | |||
Статическая погрешность отработки шага, мин. | +\- 27 | |||
Номинальный вращающий момент нагрузки, Н*м | 0,100 | |||
Номинальный момент инерции нагрузки, кг*м^2 | 4*10 ^-6 | |||
Номинальная приемистость, шаг/с, не менее | 2000 | |||
Максимальная приемистость при номинальном напряжении питания, шаг/с | 2800 | |||
не менее | ||||
Максимальный статический момент при питании двух фазовых обмоток током | 0,400 | |||
3 (+0,1/-0,1) А каждой фазы, Н*м, не менее | ||||
Максимальная частота отработки шагов в номинальном режиме, шаг/с: | ||||
при резистивной форсировке: | 8000 | |||
при импульсной форсировке: | 16000 | |||
Число фаз | 6 | |||
Режим работы | продолжительный | |||
Вращающий момент, Н*м, при моменте инерции нагрузки 2*10-6 кгм2 | ||||
при частоте управляющих импульсов | ||||
-400 | 0,35 | |||
-800 | 0,4 | |||
-1000 | 0,45 | |||
-1500 | 0,48 | |||
-2000 | 0,5 | |||
-4000 | 0,29 | |||
-6000 | 0,2 | |||
-8000…16000 | 0,1 | |||
Номинальный режим работы | S1 | |||
Степень защиты | JP44 | |||
Форма исполнения | JM4091 | |||
Класс изоляции | F | |||
Масса, кг | ||||
Возможный аналог электродвигателя ШД-5Д1МУ3 | ДШР-80 | |||
1.3. Габаритные размеры шагового электродвигателя ШД-5Д1МУ3 | ||||
Описание шагового электродвигателя ШД-5Д1МУ3 в формате .doc (MS Word) | ||||
Заказ можно сделать любым удобным для Вас способом. | ||||
По тел: +7 (495) 648-59-62, +7 (926) 743-12-76 или по e-mail: [email protected] | ||||
При заказе через электронну почту — не забывайте оставлять свои контактные данные и реквизиты. | ||||
ШД-5Д1МУ3 шаговый электродвигатель (48В) (шаговый двигатель ШД-5Д , ШД-5Д1, ШД-5Д1М У3 ), Москва
Шаговые электродвигатели ШД-5Д1МУ3 (48В) (ШД-5Д1МУЗ) постоянно в наличии.
1. Описание шагового электродвигателя ШД-5Д1МУ3 (ШД-5Д 1 МУ3, ШД-5Д1М У3, ШД-5Д1М УЗ)
Шаговые электродвигатели ШД-5Д1МУ3 перспективны для использования в станко- и приборостроении, в механизмах вычислительной техники и автоматического управления. Двигатели ШД-5Д1МУ3 предназначены для преобразования электрических импульсов в дискретные угловые перемещения высокой точности.
2. Техническое описание шагового электродвигателя ШД-5Д1МУ3 (ШД-5Д1М УЗ)
Максимальная частота отработки шагов в номинальном режиме шагового двигателя ШД-5Д1МУ3, шаг/с:
— при резистивной форсировке: 8000
— при импульсной форсировке: 16000
Число фаз шагового двигателя ШД-5Д1МУ3: 6
Режим работы шагового двигателя ШД-5Д1МУ3 — продолжительный
Вращающий момент у шагового электродвигателя ШД-5Д1М УЗ, Н*м, при моменте инерции нагрузки 2*10-6 кгм2
при частоте управляющих импульсов
— 400 0,35
— 800 0,4
— 1000 0,45
-1500 0,48
-2000 0,5
-4000 0,29
— 6000 0,2
-8000…..16000 0,1
Номинальный режим работы двигателя ШД-5Д1МУЗ S1
Степень защиты шагового электродвигателя ШД-5Д1М У3 JP44
Форма исполнения шагового двигателя ШД-5Д1МУ3 JM4091
Класс изоляции шагового электродвигателя ШД-5Д1МУ3 F
Масса двигателя ШД-5Д1МУЗ, кг 2,2
2. Габаритные размеры шаговых электродвигателей ШД-5Д1МУ3.
Габаритные размеры шаговых электродвигателей ШД-5Д1М У3 представлены на изображении ниже.
Рис.1 Габаритные размеры шагового электродвигателя ШД-5Д1М У3.
Вращающийся момент, Нм шагового электродвигателя ШД-5Д1МУ3 представлен в виде таблицы.
вращающий момент, Нм при моменте инерции нагрузки 2х10-6 кгм2, при частоте управляющих импульсов | Максимальная частота, шаг/с | Масса, кг | ||||||||
400 | 800 | 1000 | 1500 | 2000 | 4000 | 6000 | 8000-16000 | при резисторной форсировке | При электронной форсировке | |
0.35 | 0.4 | 0.45 | 0.48 | 0.50 | 0.29 | 0.20 | 0.10 | 8000 | 16000 | 2.2 |
Условия эксплуатации шаговых двигателей ШД-5Д 1 МУ3 (ШД-5Д1МУЗ): температура окружающей среды -45°С — +40°С, относительная влажность до 80% при температуре +15°С.
Шаговые электродвигатели ШД-5Д1МУ3 (48В) (ШД-5Д1МУЗ) постоянно в наличии. Отправка ТК, курьерами,почтой от 1шт. в любые регионы.
1.Область применения шагового электродвигателя ШД-5Д1МУ3 | ||||
1.1. Шаговые электродвигатели ШД-5Д1МУ3 перспективны для | ||||
использования в станко- и приборостроении, в механизмах вычислительной | ||||
техники и автоматического управления. | ||||
1.2ВВВВ Предназначены для преобразования электрических импульсов в | ||||
дискретные угловые перемещения высокой точности. | ||||
Условия эксплуатации: температура окружающей среды -45°С — +40°С, | ||||
относительная влажность до 80% при температуре +15°С. | ||||
| 2 Технические данные шагового электродвигателя ШД-5Д1МУ3 (аналог ДШР-80) | ||||
Номинальное напряжение питания, В | 48 | |||
Напряжение питания постоянного тока при резистивной форсировке, В | 48 (+4,8/-7,2) | |||
Ток в цепи фазовой обмотки в режиме фиксированной стоянки при напряжении | 3 (+0,1/-0,1) | |||
питания 48 В, при трёх включенных фазах, А | ||||
Единичный шаг, градус | 1,5 | |||
Статическая погрешность отработки шага, мин. | +\- 27 | |||
Номинальный вращающий момент нагрузки, Н*м | 0,100 | |||
Номинальный момент инерции нагрузки, кг*м^2 | 4*10 ^-6 | |||
Номинальная приемистость, шаг/с, не менее | 2000 | |||
Максимальная приемистость при номинальном напряжении питания, шаг/с | 2800 | |||
не менее | ||||
Максимальный статический момент при питании двух фазовых обмоток током | 0,400 | |||
3 (+0,1/-0,1) А каждой фазы, Н*м, не менее | ||||
Максимальная частота отработки шагов в номинальном режиме, шаг/с: | ВВВВВВВВ | |||
при резистивной форсировке: | 8000 | |||
при импульсной форсировке: | 16000 | |||
Число фаз | 6 | |||
Режим работы | продолжительный | |||
Вращающий момент, Н*м, при моменте инерции нагрузки 2*10-6 кгм2 | ВВВВВВВВ | |||
при частоте управляющих импульсов | ВВВВВВВВ | |||
-400 | 0,35 | |||
-800 | 0,4 | |||
-1000 | 0,45 | |||
-1500 | 0,48 | |||
-2000 | 0,5 | |||
-4000 | 0,29 | |||
-6000 | 0,2 | |||
-8000…16000 | 0,1 | |||
Номинальный режим работы | S1 | |||
Степень защиты | JP44 | |||
Форма исполнения | JM4091 | |||
Класс изоляции | F | |||
Масса, кг | 2,2 | |||
Возможный аналог электродвигателя ШД-5Д1МУ3 | ДШР-80 | |||
1.Область применения шагового электродвигателя ШД-5Д1МУ3 | ||||
1.1. Шаговые электродвигатели ШД-5Д1МУ3 перспективны для | ||||
использования в станко- и приборостроении, в механизмах вычислительной | ||||
техники и автоматического управления. | ||||
1.2. Предназначены для преобразования электрических импульсов в | ||||
дискретные угловые перемещения высокой точности. | ||||
Условия эксплуатации: температура окружающей среды -45°С — +40°С, | ||||
относительная влажность до 80% при температуре +15°С. | ||||
| 2 Технические данные шагового электродвигателя ШД-5Д1МУ3 (аналог ДШР-80) | ||||
Номинальное напряжение питания, В | 48 | |||
Напряжение питания постоянного тока при резистивной форсировке, В | 48 (+4,8/-7,2) | |||
Ток в цепи фазовой обмотки в режиме фиксированной стоянки при напряжении | 3 (+0,1/-0,1) | |||
питания 48 В, при трёх включенных фазах, А | ||||
Единичный шаг, градус | 1,5 | |||
Статическая погрешность отработки шага, мин. | +\- 27 | |||
Номинальный вращающий момент нагрузки, Н*м | 0,100 | |||
Номинальный момент инерции нагрузки, кг*м^2 | 4*10 ^-6 | |||
Номинальная приемистость, шаг/с, не менее | 2000 | |||
Максимальная приемистость при номинальном напряжении питания, шаг/с | 2800 | |||
не менее | ||||
Максимальный статический момент при питании двух фазовых обмоток током | 0,400 | |||
3 (+0,1/-0,1) А каждой фазы, Н*м, не менее | ||||
Максимальная частота отработки шагов в номинальном режиме, шаг/с: | ||||
при резистивной форсировке: | 8000 | |||
при импульсной форсировке: | 16000 | |||
Число фаз | 6 | |||
Режим работы | продолжительный | |||
Вращающий момент, Н*м, при моменте инерции нагрузки 2*10-6 кгм2 | ||||
при частоте управляющих импульсов | ||||
-400 | 0,35 | |||
-800 | 0,4 | |||
-1000 | 0,45 | |||
-1500 | 0,48 | |||
-2000 | 0,5 | |||
-4000 | 0,29 | |||
-6000 | 0,2 | |||
-8000…16000 | 0,1 | |||
Номинальный режим работы | S1 | |||
Степень защиты | JP44 | |||
Форма исполнения | JM4091 | |||
Класс изоляции | F | |||
Масса, кг | 2,2 | |||
Возможный аналог электродвигателя ШД-5Д1МУ3 | ДШР-80 | |||
1.3. Габаритные размеры шагового электродвигателя ШД-5Д1МУ3 | ||||
Описание шагового электродвигателя ШД-5Д1МУ3 в формате .doc (MS Word) | ||||
Заказ можно сделать любым удобным для Вас способом. | ||||
По тел: +7 (495) 648-59-62, +7 (926) 743-12-76 или по e-mail: [email protected] | ||||
При заказе через электронну почту — не забывайте оставлять свои контактные данные и реквизиты. | ||||
| ||||
Модернизация электропривода шагового двигателя ШД5 (стр. 1 из 5)
Квалификационная работа на соискание степени бакалавра
«Модернизация электропривода шагового двигателя Шд5»
Введение.
Современный электропривод представляет собой конструктивное единство электромеханического преобразователя энергии (двигателя), силового преобразователя и устройства управления. Он обеспечивает преобразование электрической энергии в механическую в соответствии с алгоритмом работы технологической установки. Разработка высокопроизводительных, компактных и экономичных систем привода является приоритетным направлением развития современной техники [1].
В данной работе рассматривается электропривод для шагового двигателя ШД-5Д1МУЗ (в дальнейшем именуемые просто, как ШД5). К сожалению, сейчас разработками электроприводов для шаговых двигателей, занимаются, в основном, за рубежом. Широкое применение двигателей ШД5¹ на установках в Институте ядерной физики (в ИЯФе около 200 экземпляров) и в промышленности для числового программного управления (ЧПУ) послужило основанием для разработки нового электропривода, взамен старому ПШД5/80, разработанному в ИЯФе.
Основным недостатком ПШД5/80 является морально – устаревшая элементная база. Так логическое управление существующего привода выполнено на ТТЛ – логике. А силовая часть выполнена из шести каналов. В каждом канале имеется четыре биполярных транзистора. При этом работа привода сопровождается значительным выделением тепла. Поэтому, в существующим приводе использовались громоздкие радиаторы. Более того, привод требовал принудительного воздушного охлаждения при интенсивной работе блока. ТТЛ – логика позволяла выполнить управление двигателем по простейшей схеме релейного управления токами в фазах. Из – за этого присутствовали пульсации момента двигателя на низких скоростях вращения, а также при старте и торможении. Важный параметр для устройств ЧПУ – отсутствие пульсаций момента независимо от скорости вращения и нагрузки на двигатель. Также важна возможность управлять ускорением при разгоне и торможении, когда влияние на работу двигателя оказывают силы инерции.
Добиваясь должного управления на ТТЛ – логике, приходилось бы использовать громоздкие платы с множеством микросхем, что в свою очередь могло привести к снижению надёжности работы привода, и появлению специальных программных обеспечений по управлению приводом. Такой привод мог не найти применения в промышленности. Поэтому в старой разработке привода ограничились простейшей схемой управления двигателем. Но современное развитие производства электронных компонентов послужило толчком для модернизации имеющегося привода. Так, например, сейчас фирмой Altera выпускаются программируемые логические матрицы, позволяющие запрограммировать логику порядка 1000 триггеров. Также в последнее время появились полевые транзисторы средних мощностей и драйверы к ним, фирмы International Rectifier, которые позволяют выполнить силовую часть привода наиболее простой. Таким образом, появились тенденции для разработки нового привода. Его конструктивные особенности будут изложены далее. А для начала я остановлюсь на особенностях самого шагового двигателя, для которого разрабатывается новый привод. Ведь выбрать оптимальный режим управления привода, можно только изучив подробно работу самого шагового двигателя, которому и посвящается следующий раздел.
1.1 Устройство
Двигатель ШД5, по числу обмоток управления (числу фаз), относится к многофазным (имеет шесть фаз) шаговым двигателям, с электромагнитной связью ротора и статора. Такие двигатели получили наибольшее распространение по сравнению с двигателями, имеющими механическую¹ связь ротора и статора, ввиду лучших динамических характеристик. По своей природе они являются синхронными двигателями, сохраняющими синхронизм не только при движении ротора, но и при пуске, торможении, реверсе, а также допускают длительную фиксированную остановку ротора, когда по обмоткам ротора проходит постоянный ток.
По типу магнитной системы ШД5 относится к параметрическим двигателям. Он имеет зубчатый ферромагнитный ротор, выполняющий роль модулятора магнитной проводимости воздушного зазора между статором и ротором.
По способу возбуждения ШД5 относится к классу реактивных двигателей, так как ротор не имеет возбуждения, и независимо от направления тока, одинаково ориентируется относительно возбужденного полюса.
По моменту, развиваемому на валу, ШД5 относится к серводвигателям (его момент составляет 0.14 Н/м), а по характеру перемещения к поворотному типу [2]. Таким образом, при подаче на двигатель импульсов управления, он совершает вращательное движение. Как это происходит, становится понятно при рассмотрении устройства шагового двигателя.
Статор шагового двигателя (рис. 1) с реактивным ротором имеет выступающие полюса, вокруг которых укладываются обмотки, соединяемые в фазы. Ротор представляет собой многополюсную зубчатую конструкцию. Обмотки двух противоположных полюсов статора соединяются последовательно и при протекании по ним тока образуют полюса противоположной полярности. При этом ротор занимает фиксированное положение, соответствующее наибольшей магнитной проводимости пути замыкания магнитного потока статора для данной возбуждённой фазы. При подаче импульса управления в следующую фазу ротор занимает новое фиксированное положение, совершая при этом шаг
α = 2π/(zpm) (1)
где zp – число зубцов ротора; m – число обмоток управления на статоре, пространственно сдвинутых относительно друг друга или число тактов коммутации схемы управления.
Если отклонить ротор, находящийся в некотором фиксированном положении на некоторый угол, то магнитная проводимость уменьшается и возникает синхронизующий момент, который будет стремиться возвратить ротор в прежнее положение. Количественно электромагнитный момент шагового двигателя можно представить как степень изменения сосредоточенной в воздушном зазоре электромагнитной энергии и угла отклонения ротора от равновесного состояния:
Mm = dEm/dα [5]
Электромагнитная энергия в воздушном зазоре шагового двигателя является периодической функцией угла рассогласования ротора Em = f(αe), а связь между углом рассогласования и геометрическим углом определяется выражением
αe = (zpα)/2 (2)
где αe – угол рассогласования, α – геометрический угол. Электромагнитную энергию в воздушном зазоре Em можно вычислить через полную магнитную проводимость воздушного зазора λ. Для этого представим обмотку статора в виде тора, имеющего разрыв в виде воздушного зазора [6]. Таким образом, выражение электромагнитного момента двигателя принимает вид:
zp dEm(αe) LmI² Фw F
Mm = – –, где Em = – Lm = – Ф = – = Fλ,
2 dαe 2 I rm
где I – ток в обмотке двигателя, Ф – магнитный поток через воздушный зазор, w – число витков в обмотке статора, F – магнитодвижущая сила управляющей обмотки статора на пару полюсов (F = wI), rm – полное магнитное сопротивление воздушного зазора, Lm – эквивалентная индуктивность воздушного зазора [7]. Таким образом, окончательно, выражение электромагнитного момента двигателя примет вид:
zp dλ
Mm = – wI² – (3)
4 dαe
Если пренебречь насыщением магнитной системы двигателя и пространственными высшими гармониками в кривой магнитного поля в воздушном зазоре, то выражение магнитной проводимости зазора будет:
1 1
λ = – (λd + λq) + – (λd – λq) Cos(2αe) [2]
2 2
где λd и λq – полные магнитные проводимости воздушного зазора шагового двигателя по продольной и поперечной осям.
Уравнение статического синхронизующего момента шагового двигателя, полученное путём подстановки [2] в (3):
Mm = 0.25zpwI²(λd – λq) Sin(2αe) (4)
Переходя, непосредственно к конструктивным особенностям ШД5 начнём с того, что этот шаговый двигатель является многостаторным (он имеет два статора). Рис. 2. Поперечная геометрия ШД5 и схемы соединения обмоток.
У многостаторного двигателя обмотки управления, находящиеся в разных статорах, не имеют между собой магнитной связи, располагаясь в двух отдельных пакетах, смещенных относительно друг друга на 2π/(zpm), рад. Размещение фазных обмоток на отдельных пакетах статора усложняет конструкцию двигателя и увеличивает его габариты. Но зато при такой конструкции многофазного двигателя удается избежать нагромождения множества обмоток в одном статоре.
Шестифазный редукторный шаговый двигатель ШД5 с симметричной магнитной системой [2] состоит из двух шихтованных статоров, которые последовательно расположены вокруг одного ротора.
Статоры сдвинуты друг относительно друга (по оси ротора) на угол 2π/(mzp) рад. В каждом статоре имеется шесть пазов, в которые уложены 12 сосредоточенных обмоток управления, соединяемых в двигателе, в шесть электрически не связанных фаз (рис. 3). На полюсах статора расположены мелкие зубцы. Ротор представляет собой цилиндр с мелкими зубцами, причем ширина зубцов по наружному диаметру ротора равна ширине зубцов статора по расточке. Работа двигателя осуществляется следующим образом. Положим, что питание одновременно подается в две соседние фазы, например, 1 и 3. При этом магнитный поток Ф замыкается по кротчайшему пути через соседние полюса. Ось результирующего магнитного поля ориентируется между полюсами 1 и 3, а ротор занимает положение, соответствующее максимальной проводимости воздушного зазора, причем, относительно пары полюсов 2 – 4 положение максимальной проводимости между зубцами статора и ротора будет сдвинуто на 1/6 зубцового деления. При снятии питания с фаз 1 и 3, и подаче его в фазы 2 и 4 ось результирующего магнитного потока смещается на π/6 рад., а ротор поворачивается на угол, соответствующий новому положению максимальной магнитной проводимости – отрабатывает шаг. Для равномерной отработки шагов необходимо, чтобы между зубцами ротора и статора под очередным полюсом был угловой сдвиг, равный 2π/(mzp) рад. При этом движение ротора осуществляется последовательным переключением фаз таким образом, чтобы ротор при каждом переключении перемещался на один и тот же угол.
Микропроцессорное управление прецизионным токарным станком
В большом числе технологических процессов требуется управление объектом по двум координатам. В нашем случае объектом является прецизионный токарный станок ТПК-125, для управления которого используем шаговый электропривод. В процессе ленточного снования применяется управление объектом – регулирующим органом – по одной координате. Рассматривается вопрос реализации микропроцессорного управления приводом подачи вместо морально устаревшего.
Контроллер выполнен с использованием ЭВМ с параллельным портом, которая бы занималась выработкой управляющих импульсов, и адаптера, преобразующего сигналы ТТЛ-уровня LPT-порта ЭВМ в электрические импульсы, пригодные для питания обмоток ШД. ЭВМ в таком способе управления вносит некоторые плюсы, которые обязаны своим появлением легкостью программирования ЭВМ с помощью систем программирования.
можно запрограммировать двигатель на определённую последовательность действий, например: сделать n шагов в сторону по часовой стрелке, затем сделать m шагов против часовой стрелки и т.д.
Блок управления шаговыми двигателями предназначен для управления лазерными, координатно-сверлильными, фрезерными, токарными (двухкоординатными) и электроэрозионными станками, построенными на базе шаговых двигателей как с раздельными, так и с частично или полностью объединенными обмотками.
Блок управления (рис. 1) включает два драйвера шаговых двигателей и контроллер сопряжения драйверов. Контроллер сопряжения драйверов (КСП) строится на микроконтроллере PIC16XX, который вследствие модернизации работает от двух интерфейсов, для более устаревших машин LPT, для новых USB, поддержка ОС Windows 98, 2000, XP, 7, 8. Драйвера шаговых двигателей построены на шести силовых каналах. Сигнал, подаваемый с КСП, усиливается полевыми транзисторами VT7-VT12 (IRF640N) и резисторами R7-R12 (5,6 кОм), таким образом, он подаётся на начало соответствующей обмотки 1-6. Резисторы R7-R12 служат для ограничения выходного тока (защита обмоток от перегрева) и совместно с диодами VD1-VD6 обеспечивает глушение резонанса ротора двигателя. В интегральных микросхемах, содержащих мощные выходные каскады с открытым коллектором, также часто имеются два внешних диода. Кроме того, некоторые микросхемы, такие как ULN2003, ULN2803 и подобные, имеют внутри оба защитных диода для каждого транзистора. Нужно отметить, что в случае применения быстродействующих ключей требуются сравнимые по быстродействию диоды. В случае применения медленных диодов требуется их шунтирование небольшими конденсаторами. Выбор пониженного напряжения питания 12 В обусловлен требованием защиты двигателя от перегрева.
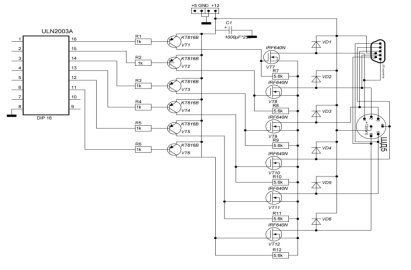
Рис. 1. Схема драйвера управления шаговым двигателем ШД-5Д1МУ3
- Диапазон регулирования скорости шагового двигателя – 6 – 12000 ш/с;
- Напряжение питания – 5 – 12 В;
- Максимальный выходной ток – 3 А.
Системы управления электроприводом, основанные на микрошаговом режиме, позволяют менять ток в фазах небольшими шагами, обеспечивая таким образом разделение половинного шага на еще меньшие микрошаги, а также дает возможность использовать наношаги. Если включены одновременно две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другой точке. Эту точку определяют соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага.
Литература:
- Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов: учебник для вузов / О.П. Михайлов. М.: Машиностроение, 1990. 304 с.
- Гаврилов А.И. Микропроцессорное управление шаговым двигателем / А.И. Гаврилов, Ю.С. Сизов // Автоматизация и управление в машино- и приборостроении: сб. науч. тр. Саратов: СГТУ, 2013. С. 60-64.
- www.stepmotors.com
ШД-5Д1М — Электродвигатели — Шаговые — ШД — Каталог — электродвигатели, сельсины, вращающиеся трансформаторы
Цену и наличие уточняйте, пожалуйста, у наших менеджеров по email: [email protected] или по телефону 8 (843) 554-58-09Технические характеристики электродвигателя ШД-5Д1М
| Номинальное напряжение питания | 48 В |
| Номинальный режим работы | S1 |
| Степень защиты | JP44 |
| Форма исполнения | JM4091 |
| Класс изоляции | F |
|
вращающий момент, Нм при моменте инерции нагрузки 2х10-6 кгм2, при частоте управляющих импульсов |
Максимальная частота, шаг/с |
Масса, кг |
||||||||
|
400 |
800 |
1000 |
1500 |
2000 |
4000 |
6000 |
8000-16000 |
при резисторной форсировке |
при электронной форсировке |
|
|
0.35 |
0.4 |
0.45 |
0.48 |
0.50 |
0.29 |
0.20 |
0.10 |
8000 |
16000 |
2.2 |
Габаритные размеры электродвигателя ШД-5Д1М