


Как работают шаговые двигатели | РОБОТОША
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно.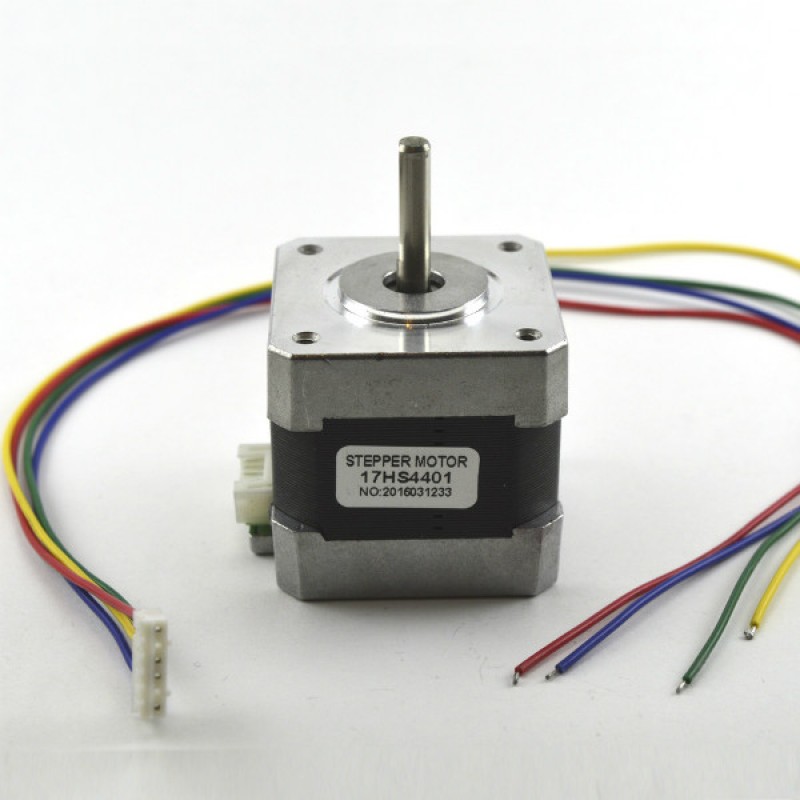 В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент.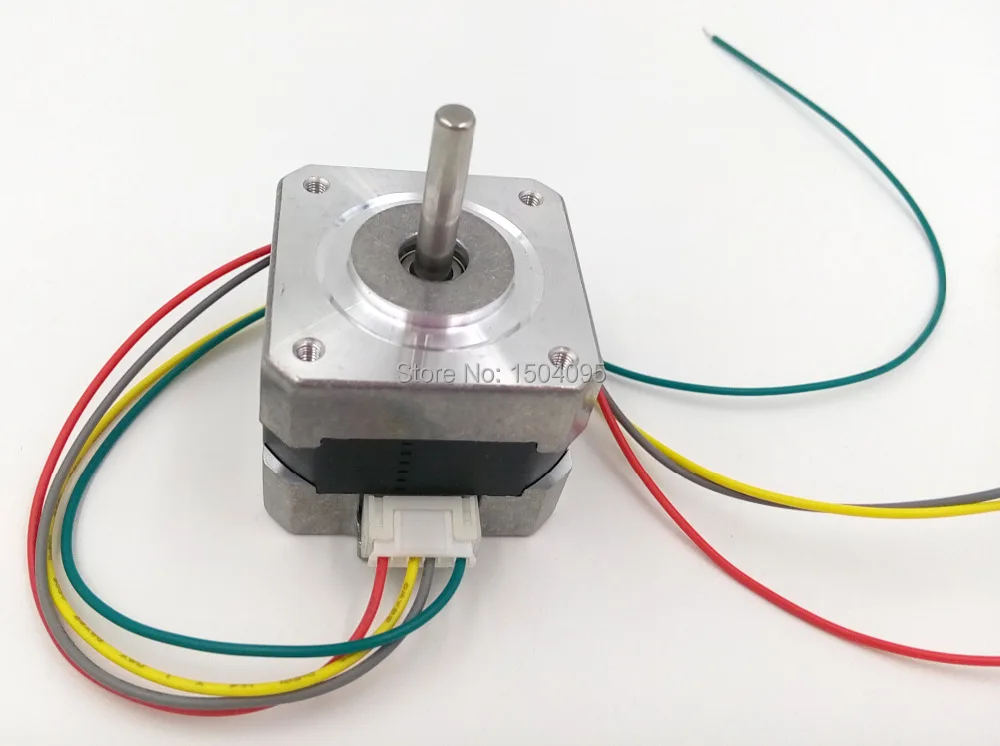 Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Еще по этой теме
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
Шаговый двигатель.
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования. Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
Следует отметить, что микрошаг возможен только в гибридных ШД.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные . Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные . Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения . Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.

- Удерживающий момент . Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения. Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
- Тормозящий момент . Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока. Данная характеристика измеряется в тех же единицах, что и удерживающий момент.
- Номинальное напряжение . Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
- Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора . Определяет скорость разгона ШД. Данная величина измеряется в грамм-квадратных сантиметрах.
- Количество шагов за один оборот (учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель.
- Длина и масса . Имеется в виду именно длина корпуса, без учета вала. А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.

 Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение. Чем больше шагов, тем мощнее и быстрее двигатель.
Чем больше шагов, тем мощнее и быстрее двигатель.Рассмотрим на примере шаговый двигатель nema. Двигатель PL57h51, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — h51. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57h210
| PL57h210 | L, мм | 131 | Индуктивность фазы, мГн | 6.0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
Температура окруж. среды, °С среды, °С | -20~40 | Масса, кг | 1.7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Размер шпоночного паза, мм |
Характеристики PL86h213
| PL86h213 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1.8±5% | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
Температура окруж. среды, °С среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.
Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.
- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
 Высокое потребление энергии вне зависимости от нагрузки.
Высокое потребление энергии вне зависимости от нагрузки.Приведеные примеры расчета применимы не только к шаговым, но и к другим типам двигателей. При учете скорости нужно учитывать, что для шаговых двигателей указывается частота — шаги/сек.
| Выбор шагового двигателя для грузоподъемной установки | |
| Выбор шагового двигателя для транспортной тележки | |
| Определение крутящего момента шагового двигателя в устройстве с использованием винтовых передач | |
| Момент, требуемый от шагового привода в системе с вращающимися цилиндрами | |
| Определение момента в механизмах с реечной передачей | |
Особенности работы ШД предъявляют весьма жесткие требования к согласованию параметров выбираемого двигателя с заданной нагрузкой. Это особенно актуально в разомкнутых системах дискретного привода, когда пропуск двигателем хотя бы одного управляющего импульса приводит к ошибке преобразования электрического сигнала управления в угол, который система исправить не в состоянии. Проверку на нагрев шаговых двигателей обычно не производят, так как они рассчитаны на длительный режим прохождения импульсов тока по обмоткам управления.
При выборе шагового двигателя, прежде всего, следует ориентироваться на потребляемую приводом (двигатель + блок управления) из сети мощность, величину напряжения питания, требуемый крутящий момент на выходном валу, скорость вращения вала и момент инерции нагрузки. Для одного и того же привода, при разных величинах напряжения питания, потребляемая мощность привода P=U*I (напряжение*ток) различается. Например, привод D5779 при напряжении питания 50В потребляет из сети 150Вт, при напряжении питания 30В – 90Вт. КПД шаговых приводов в диапазоне частот 1 — 5КГц, как и КПД синхронных двигателей с постоянными магнитами составляет 80-90%.
Мощность на выходном валу привода P=M*ω (крутящий момент*угловая скорость). Очевидно, что мощность на выходном валу не может превышать потребляемую из сети мощность.
Закон сохранения энергии для системы, состоящей из двигателя и нагрузки на валу, повернувшейся на один полушаг, выглядит следующим образом:
M двигателя *φ=0,5*J*ω 2 + M нагрузки *φ + М магн *φ +М трения *φ
где φ — угол поворота
J – приведенный к валу момент инерции системы
ω – угловая скорость
M нагрузки – момент нагрузки
М магн – момент сопротивления, создаваемый постоянными магнитами двигателя, примерно 5% от величины M двигателя
М трения – момент трения в системе
Отсюда максимальная скорость, с которой может сделать первый шаг шаговый двигатель в системе с приведенным к валу моментом инерции J и нагруженный моментом M нагрузки:
ω =(2*φ*(M двигателя – M нагрузки – М магн – М трения)/J) 1/2
На практике необходимо также учитывать электрические переходные процессы в фазах двигателей, которые зависят как от напряжения питания и индуктивности фаз двигателей, так и от способа управления двигателем. Самыми динамичными являются двигатели с минимальной индуктивностью. Обычно стартовые частоты лежат в диапазоне 800-1000Гц (2-2,5 об/сек в полушаговом режиме). Исходя из этого для шагового двигателя, работающего в полушаговом режиме, величина ускорения не должна превышать 4рад/сек 2 .
Когда требуемый момент, определен, выбор шагового двигателя зависит от предпочтительных габаритов, присоединительных размеров, цены двигателя и блока управления для него.
Если блок управления уже есть (или выбран), необходимо, чтобы ток фазы шагового двигателя не превышал возможности блока управления. Также нужно иметь ввиду число выводов, которые можно подключить к имеющемуся блоку управления.
При подборе шагового двигателя для ЧПУ необходимо отталкиваться от планируемой сферы применения станка и технических характеристик. Ниже представлены критерии выбора, классификация наиболее популярных двигателей и примеры расчета.
Как выбрать шаговый двигатель для ЧПУ: критерии
- Индуктивность. Следует вычислить квадратный корень из индуктивности обмотки и умножить его на 32. Полученное значение нужно сравнить с напряжением источника питания для драйвера. Различия между этими числами не должны сильно отличаться. Если напряжение питания на 30% и более превышает полученное значение, то мотор будет греться и шуметь. Если меньше, то крутящий момент будет слишком быстро убывать со скоростью. Большая индуктивность потенциально обеспечит возможность для большего крутящего момента. Однако для этого потребуется драйвер с большим напряжением питания.
- График зависимости крутящего момента от скорости. Позволяет определить, удовлетворяет ли выбранный двигатель условиям в техническом задании.
- Геометрические параметры. Имеет значение длина двигателя, фланец и диаметр вала.
Совет: также следует обратить внимание на омическое сопротивление фаз, номинальный ток в фазе, момент инерции ротора, максимальный статический синхронизирующий момент.
Тип двигателя
Важный критерий – тип шагового двигателя для ЧПУ станка. Широко распространены биполярные, униполярные и трехфазные модели. Каждая из них имеет свои особенности:
- биполярные чаще всего используют для ЧПУ благодаря простому подбору нового драйвера при выходе старого из строя, высокому удельному сопротивлению на малых оборотах;
- трехфазные отличаются большей скоростью, чем биполярные аналогичного размера. Подходят для случаев, когда требуется высокая скорость вращения;
- униполярные представляют собой несколько видов биполярных двигателей в зависимости от подключения обмоток.
Совет: еще один способ подбора двигателя – анализ готовых станков на рынке, которые близки по размерам и другим характеристикам к разрабатываемому.
Примеры расчетов шаговых двигателей для ЧПУ
Определяем силы, действующие в системе
Необходимо определить силу трения в направляющих, которая зависит от используемых материалов. Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с 2 , сила резания – 3 000 Н.
- Чтобы рассчитать силу трения нужно умножить коэффициент трения на вес движущейся системы. Для примера: 0.2 x 9.81 (100 кгс+300 кгс). Получается 785 Н.
- Чтобы рассчитать силу инерции надо умножить массу стола с деталью на требуемое ускорение. Для примера: 400 x 2 = 800 Н.
- Чтобы рассчитать полную силу сопротивления надо сложить силы трения, инерции и резания. Для примера: 785 + 800 + 3 000. Получается 4 585 Н.
Справка: силу сопротивления должен развивать привод стола на гайке шариковой винтовой передачи.
Рассчитываем мощность
Формулы, приведенные ниже, представлены без учета инерции вала самого шагового двигателя и других вращающихся механизмов. Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Для расчета мощности шагового двигателя следует воспользоваться формулой F=ma, где:
- F – сила в ньютонах, необходимая для того, чтобы привести тело в движение;
- m – масса тела в кг;
- а – необходимое ускорение m/c 2 .
Для определения механической мощности необходимо умножить силу сопротивления движения на скорость.
Рассчитываем редукцию оборотов
Определяется на основании номинальных оборотов сервопривода и максимальной скорости перемещения стола. Например, скорость перемещения составляет 1 000 мм/мин, шаг винта шариковой винтовой передачи – 10 мм. Тогда скорость вращения винта ШВП должна быть (1 000 / 10) 100 оборотов в минуту.
Для расчета коэффициента редукции учесть номинальные обороты сервопривода. Например, они равны 5 000 об/мин. Тогда редукция будет равна (5 000 / 100) 50.
В станках часто применяют шаговые двигатели индукторного типа, изготовленные в СССР. Речь о моделях ДШИ-200-2 и ДШИ-200-3. Они обладают следующими характеристиками:
| Параметр | ДШИ-200-2 | ДШИ-200-3 |
|---|---|---|
| Потребляемая мощность | 11.8 Вт | 16.7 Вт |
| Погрешность обработки шага | 3% | 3% |
| Максимальный статический момент | 0.46 нт | 0.84 нт |
| Максимальная чистота приемистости | 1 000 Гц | 1 000 Гц |
| Напряжение питания | 30 В | 30 В |
| Ток питания в фазе | 1.5 А | 1.5 А |
| Единичный шаг | 1.8 град | 1.8 град |
| Масса | 0.54 кг | 0.91 кг |
Шаговый двигатель понадобится любому человеку, который собрался самостоятельно собрать станок с ЧПУ. Главное – заранее определиться со сферой применения устройства. Наибольших усилий и показателей требует обработка цветных металлов, что отдельно учитывается при выборе шагового двигателя для ЧПУ.
Какие критерии определяющие для выбора?
Надо помнить о том, что, по сравнению с обычными двигателями, шаговые требуют более сложных схем для управления. А критериев не так уж много.
- Параметр индуктивности.
Первый шаг – определение квадратного корня из индуктивности обмотки. Результат потом умножаем на 32. Значение, полученное в качестве итога, потом требуется сравнивать с напряжением источника, от которого питание идёт к драйверу.
Эти числа не должны отличаться друг от друга слишком сильно. Мотор будет греться и шуметь слишком сильно, если напряжение питания больше полученного значения на 30 и больше %. Если же он меньше, то, по мере нарастания скорости, крутящий момент убывает. Чем больше индуктивность – тем проще сохранить высокий крутящий момент. Но для этого надо подобрать драйвер, имеющий большое напряжение питания. Только в этом случае шаговой двигатель работает нормально.
- График того, как крутящий момент и скорость зависят друг от друга.
Это позволит понять, насколько двигатель в принципе соответствует запросам и техническому заданию.
- Параметры геометрического плана.
- Максимальный статический синхронизирующий момент.
- Момент по инерции у роторов.
- Ток внутри фазы по номиналу.
- Общее сопротивление фаз омического типа.
О разновидностях двигателей
Для станка используемая разновидность шаговых двигателей – параметр не менее важный, чем остальные. Каждая модель наделена своими особенностями.
- Биполярные чаще всего применяются совместно с ЧПУ.
Главное достоинство – возможность легко выбрать новый драйвер, если старый выходит из строя. На малых оборотах при этом сохраняется высокое удельное сопротивление.
- Трёхфазные.
Для них характерна высокая скорость. Актуальны, если именно данному параметру уделяют больше всего внимания в случае выбора.
- Униполярные.
Это несколько видов биполярных двигателей, которые отличаются друг от друга и подбираются в зависимости от подключения обмотки.
Можно изучить готовые модели станков, предлагаемые текущим рынком. Благодаря подобному подходу выбор значительно упрощается. Главное – чтобы характеристики и размеры подходили к создаваемому проекту.
Об усилиях резания
Часто владельцы думают, что на надо сильно давить, иначе она будет неправильно работать. Это заблуждение, которое не соответствует истине. Важнее всего то, как правильно пользователь задаёт параметры рабочего процесса.
Не обязательно пользоваться сложными специальными формулами, чтобы понять, как правильно действовать. Это можно проверить и прямо голыми руками.
По поводу резонанса при средних частотах
Шаговые двигатели связаны с возникновением сильного резонанса. По сути, они работают, как маятник с подвешенным на пружине грузиком. Роль груза выполняет ротор, а поле с магнитной энергией – пружина. Собственные колебания имеют частоту, определяемую по двум показателям:
- Инерция ротора.
- Сила тока.
Резонанс появляется, когда разность между скоростью и фазностью момента достигает 180 градусов. Это означает, что присутствует соответствие скорости и изменений внутри магнитного поля. Движение становится быстрым при позиционировании по новому шагу. Крутящий момент падает из-за того, что больше всего энергии уходит, чтобы преодолеть инерцию.
Об энкодерах и драйверах, подключениях
Специальные драйверы нужны для того, чтобы управлять устройством. Они подключаются к LTP портам у персональных компьютеров. От программы идёт генерация сигналов, которые потом принимаются драйверами. После чего двигатель и получает определённые команды. Подача тока на обмотки позволяет организовать работу всего устройства. Программное обеспечение облегчает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем двигателем. Формирование управляющего сигнала происходит при участии специального контроллера. Что предполагает подключение к устройству сразу четырёх выводов шагового двигателя. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для дальнейшей работы.
Максимум по току требуемого напряжения, идущего к выводам – главный фактор, на основании которого следует делать выбор. Ток, выдаваемый драйвером, может быть следующих типов:
- Такой же, что потребляет двигатель.
- Выше, чем упомянутое ранее значение.
Желаемые параметры по исходному напряжению выбираются при помощи специальных переключателей.
Шаговые двигатели могут иметь различный порядок подключения. Обычно он зависит от того, каким количеством проводов снабжён привод. Надо обратить внимание и на назначение устройства. На рынке выпускается множество моделей, и практически у каждой используется свой вариант подключаемой схемы. Внутри размещается до 4-6 проводов. Биполярные модули сопровождают стандартно именно варианты с четырьмя проводами.
Каждые две обмотки идут с двумя приводами. Нужно использовать обычный метр, чтобы не допустить ошибок. Шестипроводные двигатели отличаются максимальной мощностью. Это значит, что каждая обмотка сопровождается двумя проводами и одним центр-краном. Такие аппараты допускают два вида соединений:
- С биполярными аппаратами.
- С униполярными моделями.
Для разделения проводов так же применяются приборы измерения. Однополярные устройства предполагают, что используются все шесть проводов. В случае с биполярными можно взять всего один центральный кран вместе с проводами по одной обмотке.
Что ещё учесть?
Центр-краном называют обычный провод. Ещё для него используют обозначения «центральный», «средний». Часть моделей шаговых двигателей снабжаются подобными приспособлениями. Каждая обмотка идёт совместно с тремя проводами, когда речь идёт об униполярных вариантах. Два из них организуют соединение с транзисторами. Центр-кран или средний идёт прямо до источника питания или напряжения.
Два боковых провода вообще можно игнорировать, если транзисторы использовать не планируется.
Пяти- и шестипроводные модели во многом похожи друг на друга. Но внутри центральные провода выводятся в один общий кабель, вместе с остальными составляющими. Обмотки не удастся соединить друг с другом, если будут отсутствовать разрывы. Лучше всего именно средний провод соединять с другими проводниками. Тогда об эффективности и безопасности устройства можно будет не волноваться. Нужно просто брать подходящие детали.
Заключение
Подобрать подходящую модель двигателя для станка будет проще, если заранее изучить основные характеристики, а так же предложения на соответствующем рынке. Главное – обращаться к поставщикам, которые заслуживают доверия. Малейший брак и ошибка приведут к выходу из строя весьма дорогостоящих деталей.
Недавно я уже писал о том, что поимел большую головную боль в виде необходимости выбирать себе новые шаговые движки. Когда-то давно, когда трава была зеленее… Ну, в общем, закупил себе набор движков, который валялся до поры до времени. Закупал их особо не заморачиваясь и не разбираясь, как их выбирать и на что сомтреть. Не повторяйте моих ошибок, изучите вопрос. Ниже я опишу подробно, что мне удалось с тех пор узнать о шаговых движках, а в частности о том, как грамотно подойти к вопросу их выбора.
Но сначала, для того, чтобы лучше понимать вопрос — давайте разберёмся,- «что же такое шаговый электродвигатель?».
Так говорит нам википедия, хотя я бы назвал его не «бесщёточный», а «бесколлекторный», но с википедией спорить не будем, её всё таки «умные» люди пишут. Да и суть от этого не сильно меняется, это, по сути своей, такой же двигатель, что и другие. Как, например, на дорогой гоночной машинке с БК движком. Такой же, да вот не такой!Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
И вот тут мы в плотную подходим к двум парам важных характеристик шагового электродвигателя. Первая пара это удерживающий момент и номинальный ток, а вторая угол поворота (шаг) и погрешность шага. Пройдёмся по каждой паре подробно.Шаговый двигатель в первую очередь спроектирован не для того, что бы он просто вращался и передавал свой вращающий момент исполнительному механизму. Он должен обеспечивать высокую точность позиционирования и достаточный момент удержания.
Если ток завышен, то двигатель греется, если ток занижен, то снижается сила, с которой он сопротивляется проворачиванию, и двигатель может начать (и начнёт) пропускать шаги. Так же необходимо помнить, что самый распространённые драйверы для шаговых двигателей A4998 и DRV8825 могут обеспечить только 2А и 2.2А соответственно. Не нужно гоняться за заоблачными показателями. 4000 г/см и 1.7-1.8А хватит за глаза и уши даже для такой брутальной кинематики, как H-Bot.Удерживающий момент — это то, с какой силой двигатель, если на него подан номинальный ток, будет сопротивляться попыткам его провернуть. Если подать на двигатель ток равный номинальном, это обеспечивает максимальный момент удержания.
Выходит, что чем мельче шаг, тем круче и точнее? Нет! Шаг в 1.8 градуса это всё, что вам нужно. Не буду сейчас приводить таблицы и примеры расчёта перемещений исполнительных механизмов на разных моделях принтеров и разных кинематиках. Поверьте мне на слово, лучше смотрите на погрешность шага, пользы будет больше. 5% — очень и очень хороший показатель.Угол поворота — это угол поворота, на который двигатель поворачивается за один шаг (кто бы мог подумать?). Потому, иногда, его просто называют шагом и не парятся. А погрешность шага — это максимальное отклонение от заданного угла поворота в процентах.
И тут можно задаться вопросом, — «а как же напряжение?». Напряжение особой роли не играет, т.к. его регулирует драйвер шагового двигателя, что бы поддерживать необходимый ток. Но знайте меру. 3V — 5V вполне достаточно, 3.4V, наверное, в самый раз.
Есть ещё такой параметр, как количество фаз. Ну, если совсем просто, то это сколько контактов/проводов торчит из двигателя. По хорошему, нам для принтера нужны биполярные двигатели с 4-мя фазами (проводами). Но существуют и с 6-тью и, даже, с 8-мью. 2), а «w» (омега) — угловая скорость (в рад / сек). Крутящий момент, создаваемый на двигателе, аналогичен силе, создаваемой, когда движущийся объект внезапно останавливается. Таким образом, T = dL / dt, где «T» — крутящий момент (в Н * м), а «dL / dt» — изменение угловой скорости (L) за единицу времени. Очевидно, что на самом деле вы не можете остановиться мгновенно, поскольку для этого потребуется бесконечный крутящий момент, но вы можете остановиться довольно быстро.
Если вы действительно хотите определить динамику системы, вам необходимо понимать линейные, инвариантные по времени (LTI) системы второго порядка. По сути, вы можете проанализировать свой шаговый двигатель, чтобы определить его инерцию (член 2-го порядка), демпфирование (член 1-го порядка) и упругость (член 0-го порядка), а затем использовать уравнение:
I * theta» + b * theta’ + k * theta = T = dL/dt
В этом уравнении я — ваш момент инерции, b — ваше демпфирование, а k — ваша упругость. Тета (и его производные по времени) представляют вашу точку зрения. Вы можете использовать решатель (например, Mathematica / WolframAlpha или MATLAB / Octave) для решения системы с учетом ваших начальных условий.
Конечно, так как «b» и «k», вероятно, будут маленькими, ваша система действительно больше похожа на:
I * theta» = dL/dt
что гораздо проще решить.
Если вы прочитаете больше об этом, вы можете смоделировать свою тормозную систему, чтобы вы могли видеть колебания, если вы немедленно остановитесь, и найти dL / dt (или тормозной момент), который создает оптимальное по времени затухание скорости.
Если вы хотите узнать больше, перейдите по следующим ссылкам:
Википедия
MIT OCW
Дартмут
Схема подключения шагового двигателя на 4 вихода
Ниже представлена схема шагового двигателя с постоянным магнитом. Используются 4 провода для подключения мотора к контроллеру.. порт USB-A, слот для карты micro-SD, 20 цифровых входных/выходных выводов (из
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с Первые шаговые двигатели появились в 30-х годах XIX века и представляли Обычно используются 4 основных полюса для 3,6-град. двигателей и 8. установка · Газотурбинная электростанция · Газотурбинные двигатели.
Газета Новгородские Ведомости — Мэрия крайних не ищет
В Новгороде порядок такой: если не строишь — контракт будет продлён 20 января в Прокуратуре Новгородской области. От схемы подключения, предложенной городом, он отказался, а свой вариант представить не мог.
Контроллер (драйвер) шагового двигателя DRV8825 — шпаргалка
Шаговый двигатель от принтера или ещё от какого устройства, довольно Если перекинуть вывод конденсатора с одного выхода питания на другой, И если вы решитесь использовать такую схему включения, берите. Гость Анатолий. #1 Гость Анатолий Гости 1 апреля 2018 . 4.
судя по схеме и мануалу, к гетборде подключается только 1 мотор. echo 4 > /sys/class/gpio/export Первая создает файлы для GPIO4, вторая настраивает его на выход. а в обороте двигателя шагов может быть 100-300, то ваша поделка будет ездить медленнее чем улитка, по мм в час.
Драйвер шагового двигателя из линейки Troyka-модулей На колодки Vin подаётся напряжение 4,5–25 В постоянного тока. Направление вращения шагового двигателя зависит от схемы подключения его обмоток и от setup() { // Настраиваем нужные контакты на выход pinMode(stepPin,
Управляется ли скорость ШД аналоговым выходом 010В? 3. Может у кого то есть схема подключения ШД + ПЛК? У ОВЕН, нет контроллеров способных работать без драйвера на шаговый двигатель. К ПЛК110 можно подключить 4 ШД, при этом по два из них могут управляться
Вопрос состоит в том по какой схеме подключить их к плате и не сжечь ее ? но не будет падать сила тока, для шагового двигателя не так важно потеря в значении. Там выход на два мотора оси Z просто запараллелен. 28. 2. koobnum. 26. 1. hoshinokoe1987. 25. 4. Все пользователи
| |
Рассылка выходит раз в сутки и содержит список программ из App Store для iPhone перешедших в категорию бесплатные за последние 24 часа.
фазный двигатель для шлифования
Шаговый Двигатель в Миколаївська область
Шаговый двигатель 4-фазный 5v 28BYJ-48-5В Електроніка » Аксесуари й комплектуючі 45 грн.
Получить ценуДвигатель для зернодробилки в России.
Двигатель для зернодробилки ДК Доставка из г. Оренбург Нет отзывов. В наличии от 9 760 руб Купить В корзину Зернодробилка «Умница» модель
Получить ценуэффективность шлифования камня
Процесс шлифования для камня. процесса дробления для мм камня в. дробилка камня фракции 5 20 в самаре -Добыча машина 20 Условия доставки
Получить ценуКак подключить трехфазный
· Подключить трехфазный двигатель в однофазную сеть 220 В можно но при этом надо быть готовым пожертвовать значительным снижением его мощностив лучшем случае она составит 70 от паспортной но для большинства целей
Получить ценуТрехфазный двигатель в однофазной сети.
напряжения Трехфазной сети и их Соотношение3-фазный двигатель 5.5kwAlibaba
Откройте для себя. 3-фазный двигатель 5.5kw с высокоэффективной конструкцией превосходным пусковым моментом быстрым откликом и простотой в использовании работающей на чрезвычайно высоких скоростях.
Получить ценуУгловая шлифовальная машина — Википедия
· Угловая шлифовальная машина (УШМ) или угловая шлифмашина или углошлифмашина или шлифмашина (разг. «болгарка») — шлифовальная машина для резки шлифования и зачистки изделий из камня металла и других материалов в
Получить ценуТрехфазный двигатель в однофазной сети.
· Для того чтобы включить трехфазный двигатель в однофазной сети требуется дополнительная схема подключения в которую помимо пусковой кнопки входят два конденсатора. Их величину нужно знать иначе работать система
Получить ценуТрёхфазный двигатель — Википедия
· Режимы работы Асинхронный двигатель согласно принципу обратимости электрических машин может работать как в двигательном так и в генераторном режимах.Для работы асинхронного двигателя в любом режиме требуется
Получить ценуТрехфазный электродвигатель для осевых
· DEZHOU HENGLI ELECTRICAL MACHINERY CO. LTD Адрес No.26 Xinyuan Road Canal Economic Development Zone Dezhou City Shandong Province.P.R.C PC 253005 Тел Факс Email wmb dzhldj Контактное
Получить ценуэффективность шлифования камня
Процесс шлифования для камня. процесса дробления для мм камня в. дробилка камня фракции 5 20 в самаре -Добыча машина 20 Условия доставки
Получить ценуУгловая шлифовальная машина — Википедия
· Угловая шлифовальная машина (УШМ) или угловая шлифмашина или углошлифмашина или шлифмашина (разг. «болгарка») — шлифовальная машина для резки шлифования и зачистки изделий из камня металла и других материалов в
Получить ценуКрановые электродвигатели MTF МТН.
относительная влажность окружающей среды для климатических исполнений У1 УХЛ180 при 15°С для климатических исполнений Т1 О180 при 27°С.
Получить цену4-фазный шаговый мотор в Украине.
Prom.ua — Лидер онлайн-торговли в Украине. Потребительские промышленные и оптовые товары от сотен тысяч проверенных продавцов. Все для вашего бизнеса быта и отдыха Шаговый двигатель Leadshine 57HS13 1.8°/ 4 A для NEMA 23 двухфазный
Получить ценуСтанок для шлифования для коленчатого
станок для шлифования с внешним цилиндром MKS1332 MKS1632. для зубчатых передач для коленчатого вала ЧПУ. станок для шлифования с внешним цилиндром. MKS1332 MKS1632. Ход Х 330 mm. Скорость вращения
Получить ценуКитай Электродвигатель Китай
Часть Мини- Двигатель Промышленных Двигателей 3-фазный Двигатель Се Цена FOB для Справки 1 000 00-100 000 00 / шт. MOQ 1 шт. Применение Промышленное
Получить цену4-фазный шаговый мотор в Украине.
Prom.ua — Лидер онлайн-торговли в Украине. Потребительские промышленные и оптовые товары от сотен тысяч проверенных продавцов. Все для вашего бизнеса быта и отдыха Шаговый двигатель Leadshine 57HS13 1.8°/ 4 A для NEMA 23 двухфазный
Получить ценуЭлектродвигатель 4 кВ 950 об/мин 3х- фазный
· Двигатель б/у. после ТО Применяется на зернометателе ЗМ 60 с родным шкивом по два техстропа.
Получить ценуБарабанные двигатели HIMMEL TM 321
Барабанный двигатель кассетного типа Одно-фазный двигатель по запросу. Купить барабанные двигатели HIMMEL Antriebstechnik TM 321 узнать цену и больше информации о продукте Вы можете обратившись к нашим специалистам.
Получить ценуТрёхфазный двигатель — Википедия
· Режимы работы Асинхронный двигатель согласно принципу обратимости электрических машин может работать как в двигательном так и в генераторном режимах.Для работы асинхронного двигателя в любом режиме требуется
Получить ценуArduino. Шаговый двигатель 28byj-48 (stepper
Основные характеристики мотора 28BYJ-48 питание от 5 или 12 Вольт 4-х фазный двигатель угол шага 5 625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano.
Получить ценуДвигатели Briggs Stratton купить в Минске
В нашем фирменном магазине «БензоГрад» в Минске (доставка по всей Беларуси) Вы сможете купить двигатель Briggs Stratton для широкого спектра хозяйственной техники (газонокосилки снегоуборщика и др.).
Получить ценуКупить гриндер Спутник для дома и мастерской
· Мощный гриндер Спутник. Двигатель 1 5 кВтгриндер для дома и гаража. Поворотная станинав комплекте. 3 ленты в подарок. Купить от завода-производителя. Прямые продажи без
Получить ценуБарабанные двигатели HIMMEL TM 321
Барабанный двигатель кассетного типа Одно-фазный двигатель по запросу. Купить барабанные двигатели HIMMEL Antriebstechnik TM 321 узнать цену и больше информации о продукте Вы можете обратившись к нашим специалистам.
Получить ценуТрехфазный электродвигатель для осевых
· DEZHOU HENGLI ELECTRICAL MACHINERY CO. LTD Адрес No.26 Xinyuan Road Canal Economic Development Zone Dezhou City Shandong Province.P.R.C PC 253005 Тел Факс Email wmb dzhldj Контактное
Получить ценуДвигатель для зернодробилки в России.
Двигатель для зернодробилки ДК Доставка из г. Оренбург Нет отзывов. В наличии от 9 760 руб Купить В корзину Зернодробилка «Умница» модель
Получить цену3-х фазный асинхронный двигательAlibaba
Серии YCT 3 фазный двигатель Магнитный 7.5kw генератора для продажи 100 00 -800 00 / компл. 1.0 компл.
Получить ценуЧто такое шаговый двигатель, и зачем он нужен?
Что такое шаговый двигатель, и зачем он нужен?
Шаговый двигатель — это электромеханичское
устройство, которое преобразует электрические импульсы в дискретные
механические перемещения. Так, пожалуй, можно дать строгое определение.
Наверное, каждый видел, как выглядит шаговый двигатель внешне: он
практически ничем не отличается от двигателей других типов. Чаще всего это
круглый корпус, вал, несколько выводов (рис. 1).
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу
- возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Но не все так хорошо…
- шаговым двигателем присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Что выбрать?
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях. По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель — дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт.
Возможность получения низкой частоты вращения часто
является причиной того, что разработчики, будучи не в состоянии
спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В
то же время коллекторный двигатель имеет более высокую удельную мощность,
низкую стоимость, простую схему управления, и вместе с одноступенчатым
червячным редуктором он способен обеспечить тот же диапазон скоростей, что
и шаговый двигатель. К тому же, при этом обеспечивается значительно
больший момент. Приводы на основе коллекторных двигателей очень часто
применяются в технике военного назначения, а это косвенно говорит о
хороших параметрах и высокой надежности таких приводов. Да и в современной
бытовой технике, автомобилях, промышленном оборудовании коллекторные
двигатели распространены достаточно сильно. Тем не менее, для шаговых
двигателей имеется своя, хотя и довольно узкая, сфера применения, где они
незаменимы.
Ссылки по теме:
Шаговые двигатели выбор и расчет основных параметров.
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения. Вал шагового двигателя вращается с дискретным шагом, когда на него подаются управляющие импульсы в правильной последовательности. Вращение двигателей напрямую зависит от входящих импульсов, так же они напрямую управляют направлением и скоростью вращения вала двигателя.
Преимущества и недостатки шагового двигателя:
Преимущества:
— угол поворта двигателя пропорционален входным импульсам;
— фиксация положения при остановке током удержания;
— точное позиционирование и повторяемость движения, так как большинство шаговых двигателей имеют точность 3-5% шага, и эта ошибка не суммируется от одного шага к следующему;
— низкая инертность при запуске, остановке и реверсе;
— высокая надежность, поскольку в двигателе отсутствуют контактные щетки, поэтому срок службы двигателя в основном зависит от срока службы подшипников;
— реакция двигателя на цифровые входные импульсы обеспечивает управление без обратной связи, что делает систему более простой и, следовательно, более экономичной;
— можно достичь очень низкой скорости синхронного вращения с нагрузкой, которая напрямую связана с валом;
— можно реализовать широкий диапазон скоростей вращения, так как скорость пропорциональна частоте входных импульсов;
— шаговые двигатели дешевле серводвигателей.
Недостатки:
— может возникнуть явление резонанса, при некорректном расчете узла или системы управления;
— двигатель непрост вэксплуатации наочень высоких скоростях, 3000+ об/мин;
— сложность системы управления;
— падение мощности с ростом скорости вращения;
— отсутствие обратной связи;
— невысокая удельная мощность;
— низкая скорость вращения;
— шум.
Выбор шагового двигателя.
Шаговый двигатель можно использовать когда требуется контролируемое движение. Они могут использоваться в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронизацию. Из-за присущих выше преимуществ, шаговые двигатели нашли свое место в различных устройствах: принтеры, плоттеры, лазерные резаки, гравировальные станки, устройства захвата и так далее.
При выборе шагового двигателя для вашего устройства необходимо учитывать несколько факторов:
Как двигатель будет связан с нагрузкой?
Какие скорость и ускорения необходимо реализовать?
Какой крутящий момент необходим для перемещения исполнительного механизма?
Какая степень точности требуется при позиционировании?
Количество полюсов (однополюсный/биполярный)
Обычно шаговые двигатели имеют две фазы, но также существуют трех- и пятифазные двигатели. Биполярный двигатель с двумя фазами имеет одну обмотку/фазу, а однополярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют четырехфазным двигателем, хотя он имеет только две фазы. Двигатели с двумя отдельными обмотками на фазу могут приводиться в двухполярный или однополярный режим. Желательно, чтобы количество проводов на двигателе соответствовало количеству контактов на драйвере, чтобы не заниматься различными ухищрениями при подключения.
Номинальный ток
Обычно указывается максимальный ток, который подается одновременно на обе обмотки. Максимальный ток через одну обмотку (который действительно имеет значение при использовании микрошагов) указывается достаточно редко. При подаче номинального тока на одну обмотку происходит нагрев двигателя, из-за этого обычно ограничивают ток двигателя не более 85% от номинального тока. Для достижения максимального крутящего момента двигателя без перегрева, необходимо выбрать двигатель с номинальным током не более чем на 25% выше, чем рекомендуемый максимальный ток привода шагового двигателя.
Крутящий момент
Выходной крутящий момент и мощность шагового двигателя зависят от размера двигателя, теплоотвода, рабочего цикла, обмотки двигателя и типа используемого привода. Если шаговый двигатель работает без нагрузки во всем диапазоне частот, одна или несколько точек собственных колебаний резонанса могут быть обнаружены либо по звуку, либо по датчикам вибрации. Полезный крутящий момент от шагового двигателя может быть резко уменьшен за счет резонансов. Работы на резонансных частотах следует избегать. Внешнее демпфирование, дополнительная инерция или применение микрошагов используются для уменьшения эффекта резонанса.
Удерживающий момент
Это максимальный крутящий момент, который может обеспечить двигатель, когда обе обмотки находятся под напряжением при полном токе. Крутящий момент пропорционален току (за исключением очень малых токов), поэтому, например, если вы установите драйверы на 85% от номинального тока двигателя, то максимальный крутящий момент будет 85% * 0,707 = 60% от указанного удерживающего момента.
Крутящий момент возникает, когда угол ротора отличается от идеального угла, который соответствует току в его обмотках. Когда шаговый двигатель ускоряется, возникает крутящий момент для преодоления собственной инерции ротора и массы нагрузки, приводимой в движении. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла.
Известно, что использование микрошага снижает крутящий момент. На самом деле это означает, что угол запаздывания равен углу, соответствующему одному микрошагу (поскольку вы хотите, чтобы положение было с точностью до одного микрошага), более высокое значение микрошага предполагает уменьшение угла, а значит и уменьшение крутящего момента. Крутящий момент на единицу угла (что действительно имеет значение) не уменьшается при увеличении микрошага. Иными словами, отправка импульса на двигатель на один микрошаг 1/16 приводит к точно таким же фазовым токам (и, следовательно, к тем же силам), что и к отправке двух 1/32 микрошагов или четырех 1/64 микрошагов и так далее.
Размер
Шаговые двигатели также классифицируются в соответствии с размерами корпуса, которые соответствуют размеру рамы двигателя. Например, шаговый двигатель NEMA11 имеет размер рамы приблизительно 1,1 дюйма (28 мм). Аналогично, шаговый двигатель NEMA23 имеет размер корпуса 2,3 дюйма (57 мм) и т. д. Однако длина корпуса может изменяться от двигателя к двигателю в рамках одной и той же классификации размеров, при этом крутящий момент двигателя с определенным размером рамы будет увеличиваться с увеличением длины корпуса.
NEMA8:
— габарит рамы 20х20 мм;
— диапазон длин: 30-42 мм;
— крутящий момент: 0,18-0,3 кг*см.
NEMA11
— габарит рамы 28х28 мм;
— диапазон длин: 32-51 мм;
— крутящий момент: 0,43-0,9 кг*см.
NEMA14
— габарит рамы 35х35 мм;
— диапазон длин: 28 мм;
— крутящий момент: 1,0 кг*см.
NEMA16
— габарит рамы 39х39 мм;
— диапазон длин: 20-38 мм;
— крутящий момент: 0,65-2,0 кг*см.
NEMA17
— габарит рамы 42х42 мм;
— диапазон длин: 25-60 мм;
— крутящий момент: 1,7-6,5 кг*см.
NEMA23
— габарит рамы 56х56 мм;
— диапазон длин: 41-76 мм;
— крутящий момент: 2,88-18,9 кг*см.
NEMA34
— габарит рамы 86х86 мм;
— диапазон длин: 65-156мм;
— крутящий момент: 34-122 кг*см.
NEMA43
— габарит рамы 110х110 мм;
— диапазон длин: 99-201 мм;
— крутящий момент: 112-280 кг*см.
NEMA51
— габарит рамы 130х130 мм;
— диапазон длин: 165-270 мм;
— крутящий момент: 270-500 кг*см.
Угол шага.
Существует два распространенных угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам/оборот. Большинство устройств используют двигатели с шагом 1,8 град/шаг.
При заданной скорости вращения 0,9-градусный двигатель производит вдвое больше индуктивной обратной эдс, чем 1,8-градусный двигатель, из-за этого возможно будет необходимо использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса.
Для двигателей 0,9 градуса необходимо подавать шаговые импульсы драйвера с удвоенной скоростью по сравнению с двигателями 1,8 градуса. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать шаговые импульсы.
Разрешение и точность позиционирования.
На разрешение и точность позиционирования системы шагового двигателя влияют несколько факторов: угол шага (длина полного шага шагового двигателя), выбранный режим движения (полный шаг, полшага или микрошаг) и скорость передачи. Это означает, что есть несколько различных комбинаций, которые можно использовать для получения желаемого разрешения, из-за этого проблема разрешения обычно может быть решена после того, как были определены размер двигателя и тип привода.
Самоиндукция .
Индуктивность двигателя влияет на скорость, с которой драйвер шагового двигателя может приводить двигатель в действие до падения крутящего момента. Если мы временно игнорируем обратную эдс из-за вращения, а номинальное напряжение двигателя намного меньше, чем напряжение питания привода, то максимальные обороты в секунду перед падением крутящего момента составляют:
оборотов_в_секунду=(2*напржение_БП)/(шагов_на оборот*3,14* индуктивность* ток)
Если двигатель приводит ремень GT2 через шкив, это дает максимальную скорость в мм/с как:
скорость=(4*кол-во_зубьев_шкива*напряжение_БП)/(шагов_на_оборот*3,14* индуктивность*ток)
Например:
двигатель 1,8 град/шаг ( т. е. 200 шагов/об) с индуктивностью 4 мГн работает при 1,5, А при напряжении питания 12 В, и привод ремня GT2 с 20-зубчатым шкивом начинает терять крутящий момент со скоростью около 250 мм/с.
На практике крутящий момент начинает падать раньше, чем это из-за обратной эдс, вызванной движением, потому что не учитывается сопротивление обмоток. Моторы с низкой индуктивностью также имеют низкую ЭДС из-за вращения. Для достижения высоких скоростей, необходимо выбирать двигатели с низкой индуктивностью и высоким напряжением питания.
Сопротивление и номинальное напряжение
Это сопротивление на фазу и падение напряжения на каждой фазе, когда двигатель неподвижен, и фаза передает свой номинальный ток (который является результатом сопротивления и номинального тока). Это важно когда номинальное напряжение значительно ниже напряжения питания для шаговых драйверов.
Обратный ЭДС из-за вращения
Когда шаговый двигатель вращается, то создается обратная эдс. При идеальном нулевом угле запаздывания на 90 градусов не в фазе с напряжением возбуждения, а в фазе с обратной ЭДС из-за индуктивности. Когда двигатель выдает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.
Обратный ЭДС из-за поворота обычно не указывается в спецификации, но мы можем оценить его по следующей формуле:
ЭДС= 1,414*3,14*момент_удержания*оборотов_в_секунду/номинальный_ток
Формула предполагает, что удерживающий момент указан для обеих фаз, находящихся под напряжением при номинальном токе. Если это указано только с одной фазой под напряжением, замените 1,414 на 2.
Пример: рассмотрим 200-шаговый двигатель, приводящий каретку через шкив с 20 зубцами и ремень GT2. Это 40-миллиметровое движение за оборот. Для достижения скорости 200 мм/сек нам нужно 5 об/сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы работают при 1,68, А, пиковая обратная эдс из-за вращения составляет
1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Как вбрать необходимое напряжение питания
Если заранее известна необходимая скорость движения для вашего устройства, можно предварительно определить, какое напряжение питания вам потребуется для драйверов двигателя.
Пример: определим необходимую скорость движения. Для этого примера будем использовать 200 мм/сек, передача шкив 20 зубьев GT2.
Исходя из необходимой скорости движения, определим максимальную скорость ремня.
Прикинем обратную ЭДС от индуктивности:
напряжение=шагов_в_сек*3,14*ток_двигателя*ЭДС_двигателя*N/2
где N — число полных шагов на оборот (200 для двигателей с 1,8 градусами или 400 для двигателей с 0,9 градусами).
Возьмем для примера двигателя со следующими параметрами: 0,9 градуса с индуктивностью 4,1 мГн, и токе 1А. Таким образом, обратная эдс из-за индуктивности составляет:
5*3,142*1,0*4,1e-3*400/2 = 12,87 В
Вычислим обратную ЭДС из-за вращения по приведенной ранее формуле.
Двигатели для примера имеют номинальный ток 1,68А и момент удержания 0,44 Нм, поэтому результат равен:
1,414*3,142*0,44*8,7/1,68 = 10,1 В
Предпочтительно, чтобы напряжение питания драйвера составляло по меньшей мере сумму этих двух обратных эдс, плюс еще несколько вольт запаса. При использовании двух двигателей последовательно требуемое напряжение удваивается.
Алгоритм выбора шагового двигателя
1. Определение компонента механизма привода .
Определите механизм и необходимые входные данные, вариант механизма, приблизительные размеры, расстояния перемещения и время позиционирования.
2. Рассчитайте необходимое разрешение.
Найдите разрешение, необходимое для двигателя. Исходя из требуемого разрешения, определите, будет ли использоваться только двигатель или мотор-редуктор . Тем не менее, благодаря использованию технологии микрошагов, достичь требуемого разрешения стало гораздо легче.
3. Определите схему работы
Определите схему работы, которая соответствует требуемым данных. Рассчитайте значения ускорения (замедления) и скорость рабочего импульса, чтобы рассчитать момент ускорения.
4. Рассчитайте необходимый крутящий момент.
Рассчитайте момент нагрузки и момент ускорения и найдите требуемый момент, требуемый двигателем.
5. Выберите двигатель.
Сделайте предварительный выбор двигателя на основе требуемого крутящего момента. Определите используемый двигатель по характеристикам скорости и крутящего момента.
6. Проверьте выбранный двигатель.
Подтвердите скорость ускорения / замедления и коэффициент инерции.
Общие рекомендации:
— если не планируется использовать внешние драйверы шаговых двигателей, выбирайте двигатели с номинальным током не менее 1,2, А и не более 2,0 А.
— рассчитывайте на рабочий ток шагового двигателя 50-85% от номинального.
— размер:
Nema 17- самый популярный размер, используемый в домашних проектах.
Nema 23 необходимо использовать если не хватает крутящего момента от длинных двигателей Nema 17.
— старайтесь не использовать двигатели с номинальным напряжением (или произведением номинального тока и фазового сопротивления)> 4 В или индуктивности> 4 мГн.
— выборйте двигатель с 0,9 град/шаг, если необходима дополнительная точность позиционирования, для стандартных решений используйте двигатели 1,8 град/шаг.
— при использовании 0,9 градусных шаговых двигателей или двигателей с высоким крутящим моментом, необходимо применение блоков питания с напряжением 24 В, чтобы поддерживать крутящий момент на более высоких скоростях.
— Википедия, бесплатная энциклопедия
Из Википедии, свободной энциклопедии
Электродвигатель преобразует электрическую энергию в механическое движение. Обратную задачу — преобразование механического движения в электрическую энергию — выполняет генератор или динамо-машина. Во многих случаях два устройства различаются только своим применением и незначительными деталями конструкции, а в некоторых приложениях используется одно устройство для выполнения обеих ролей.Например, тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оснащен динамическими тормозами.
Операция
Большинство электродвигателей работают за счет электромагнетизма, но также существуют двигатели, основанные на других электромеханических явлениях, таких как электростатические силы и пьезоэлектрический эффект. Фундаментальный принцип, на котором основаны электромагнитные двигатели, заключается в том, что на любой провод действует механическая сила, когда он проводит электричество, находясь в магнитном поле.Сила описывается законом силы Лоренца и перпендикулярна как проводу, так и магнитному полю. Большинство магнитных двигателей являются вращающимися, но существуют и линейные типы. В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть — статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент. Двигатель содержит электромагниты, намотанные на раму. Хотя эту раму часто называют арматурой, этот термин часто используют ошибочно.Правильно, якорь — это та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины в качестве якоря может выступать либо ротор, либо статор.
Двигатели постоянного тока
Электродвигатели различных типоразмеров.Один из первых электромагнитных роторных двигателей был изобретен Майклом Фарадеем в 1821 году и состоял из свободно висящего провода, погруженного в бассейн с ртутью. Постоянный магнит был помещен в середину ртутной ванны. Когда через провод пропускался ток, он вращался вокруг магнита, показывая, что ток порождал круговое магнитное поле вокруг провода.Этот двигатель часто демонстрируется на школьных уроках физики, но иногда вместо токсичной ртути используется рассол (соленая вода). Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздняя доработка — Колесо Барлоу.
В другой ранней конструкции электродвигателя использовался поршень возвратно-поступательного действия внутри переключаемого соленоида; концептуально его можно рассматривать как электромагнитную версию двухтактного двигателя внутреннего сгорания.
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил вращающуюся динамо-машину со вторым аналогичным устройством, управляя им как двигателем.
Классический двигатель постоянного тока имеет вращающийся якорь в виде электромагнита. Поворотный переключатель, называемый коммутатором, меняет направление электрического тока дважды за цикл, чтобы он протекал через якорь, так что полюса электромагнита толкаются и притягиваются к постоянным магнитам на внешней стороне двигателя. Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря. В момент переключения полярности инерция поддерживает классический двигатель в нужном направлении.(См. Схемы ниже.)
Простой электродвигатель постоянного тока. Когда катушка запитана, вокруг якоря создается магнитное поле. Левая сторона якоря отодвигается от левого магнита и тянется вправо, вызывая вращение. Якорь продолжает вращаться. Когда якорь выравнивается по горизонтали, коммутатор меняет направление тока через катушку на противоположное, изменяя направление магнитного поля. Затем процесс повторяется.Электродвигатель постоянного тока с возбуждением от возбуждения
Постоянные магниты на внешней стороне (статоре) двигателя постоянного тока могут быть заменены электромагнитами.Изменяя ток возбуждения, можно изменять соотношение скорость / крутящий момент двигателя. Обычно обмотка возбуждения размещается последовательно (последовательно намотанная) с обмоткой якоря для получения низкоскоростного двигателя с высоким крутящим моментом, параллельно (параллельная обмотка) с якорем для получения высокоскоростного двигателя с низким крутящим моментом или для частичной обмотки. параллельно и частично последовательно (составная намотка) для баланса, обеспечивающего стабильную скорость в диапазоне нагрузок. Дальнейшее уменьшение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
Регулировка скорости
Вообще говоря, скорость вращения двигателя постоянного тока пропорциональна приложенному к нему напряжению, а крутящий момент пропорционален току. Регулировка скорости может быть достигнута с помощью регулируемых выводов аккумуляторной батареи, переменного напряжения питания, резисторов или электронного управления. Направление двигателя постоянного тока с обмоткой возбуждения можно изменить, поменяв местами подключения возбуждения или якоря, но не то и другое вместе, это обычно делается с помощью специального набора контакторов (контакторов направления).
Эффективное напряжение можно изменять, вставляя последовательный резистор или с помощью переключающего устройства с электронным управлением, состоящего из тиристоров, транзисторов или, исторически, ртутных дуговых выпрямителей. В цепи, известной как прерыватель, среднее напряжение, приложенное к двигателю, изменяется путем очень быстрого переключения напряжения питания. Поскольку отношение «включено» к «выключено» изменяется для изменения среднего приложенного напряжения, скорость двигателя изменяется. Быстрое переключение требует меньше энергии, чем последовательные резисторы.Выходные фильтры сглаживают среднее напряжение, подаваемое на двигатель, и снижают шум двигателя.
Поскольку двигатель постоянного тока с последовательным заводом развивает максимальный крутящий момент на низкой скорости, он часто используется в тяговых устройствах, таких как электровозы и трамваи. Другое применение — стартеры для бензиновых и небольших дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи). По мере ускорения двигателя ток якоря (и, следовательно, возбуждения) уменьшается.Уменьшение поля заставляет двигатель ускоряться (см. «Слабое поле» в последнем разделе). Как следствие, скорость двигателя стремится к бесконечности, но двигатель самоуничтожится, прежде чем начнет так быстро вращаться.
Одним из интересных методов управления скоростью двигателя постоянного тока был Ward-Leonard Control. Это метод управления двигателем постоянного тока (обычно с шунтирующей или составной обмоткой) и был разработан как метод обеспечения двигателя с регулируемой скоростью от источника переменного тока, хотя он имел свои преимущества в схемах постоянного тока.Источник переменного тока используется для привода двигателя переменного тока, обычно асинхронного двигателя, который приводит в действие генератор постоянного тока или динамо-машину. Выход постоянного тока из якоря напрямую подключен к якорю двигателя постоянного тока (обычно идентичной конструкции). Шунтирующие обмотки возбуждения обеих машин постоянного тока возбуждаются через переменный резистор от якоря генератора. Этот переменный резистор обеспечивает исключительно хорошее управление скоростью от состояния покоя до полной скорости и постоянный крутящий момент. Этот метод управления был фактически методом с момента его разработки до тех пор, пока его не вытеснили твердотельные тиристорные системы.Она нашла применение практически в любой среде, где требовалось хорошее управление скоростью, от пассажирских лифтов до обмотки головок большой шахты и даже промышленного технологического оборудования и электрических кранов. Его принципиальным недостатком было то, что для реализации схемы требовалось 3 машины (5 в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих случаях установка двигатель-генератор часто оставалась постоянно работающей, чтобы избежать задержек, которые в противном случае были бы вызваны ее запуском по мере необходимости.На момент написания (май 2006 г.) существует множество устаревших установок Ward-Leonard.
Универсальные двигатели
Вариантом электродвигателя постоянного тока является универсальный электродвигатель . Название происходит от того факта, что он может использовать переменный или постоянный ток питания, хотя на практике они почти всегда используются с источниками переменного тока. Принцип заключается в том, что в двигателе постоянного тока с обмоткой поля ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) в одно и то же время, и, следовательно, генерируемая механическая сила всегда в одном и том же направлении. .На практике двигатель должен быть специально спроектирован для работы с переменным током (необходимо учитывать импеданс, а также пульсирующую силу), и получаемый в результате двигатель обычно менее эффективен, чем эквивалентный чистый двигатель постоянного тока . При работе на нормальных частотах линии электропередачи максимальная мощность универсальных двигателей ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного железнодорожного тягового двигателя. В этом приложении для поддержания высокого электрического КПД они работали от источников переменного тока с очень низкой частотой с частотой 25 Гц и 16 2/3 Гц.Поскольку это универсальные двигатели, локомотивы, использующие эту конструкцию, также обычно могли работать от третьего рельса с питанием от постоянного тока.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют типичные характеристики двигателей постоянного тока, в частности, с высоким пусковым моментом и очень компактной конструкцией, если используются высокие скорости вращения. Отрицательный аспект — проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором. В результате такие двигатели обычно используются в устройствах переменного тока, таких как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами.Непрерывное управление скоростью универсального двигателя, работающего на переменном токе, очень легко достигается с помощью тиристорной схемы, в то время как ступенчатое регулирование скорости может осуществляться с помощью нескольких отводов на катушке возбуждения. Бытовые блендеры, рекламирующие много скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает на полуволновом постоянном токе с половиной среднеквадратичного напряжения линии питания переменного тока).
В отличие от двигателей переменного тока, универсальные двигатели могут легко превышать один оборот за цикл сетевого тока.Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где требуется высокая скорость работы. Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, Dremel и другие подобные миниатюрные шлифовальные машины часто превышают 30 000 об / мин. Теоретический универсальный двигатель, которому разрешено работать без механической нагрузки, будет превышать скорость, что может привести к его повреждению. В реальной жизни, однако, различное трение подшипников, «парусность» якоря и нагрузка любого встроенного охлаждающего вентилятора — все это предотвращает превышение скорости.
Из-за очень низкой стоимости полупроводниковых выпрямителей в некоторых приложениях, в которых раньше использовался универсальный двигатель, теперь используется чистый двигатель постоянного тока, обычно с полем постоянного магнита. Это особенно верно, если полупроводниковая схема также используется для регулирования скорости.
Преимущества универсального двигателя и распределения переменного тока сделали установку низкочастотной системы распределения тягового тока экономичной для некоторых железнодорожных установок. На достаточно низких частотах характеристики двигателя примерно такие же, как если бы двигатель работал от постоянного тока.Использовались частоты всего 16 2/3 Гц.
Двигатели переменного тока
Типичный двигатель переменного тока состоит из двух частей:
- Внешний неподвижный статор с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и;
- Внутренний ротор, прикрепленный к выходному валу, которому крутящий момент создается вращающимся полем.
Существует два основных типа двигателей переменного тока в зависимости от типа используемого ротора:
- Синхронный двигатель, который вращается точно с частотой питающей сети или долей частоты питающей сети, и;
- Асинхронный двигатель, который вращается немного медленнее и обычно (хотя и не всегда) имеет форму двигателя с короткозамкнутым ротором.
Принцип вращающегося магнитного поля, который обычно приписывают Николе Тесле в 1882 году или около того, использовался такими учеными, как Майкл Фарадей в 1820-х годах, а затем Джеймс Клерк Максвелл. Тесла, однако, использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. Михаэль фон Доливо-Добровльски изобрел первый современный трехфазный «ротор с клеткой» в 1890 году. Введение двигателя с 1888 года и далее положило начало тому, что известно. как Вторая промышленная революция, сделавшая возможным эффективное производство и распределение электроэнергии на большие расстояния с использованием системы передачи переменного тока, также изобретение Теслы (1888 г.) [1].Первая успешная коммерческая трехфазная система генерации и передачи на большие расстояния была спроектирована Альмерианом Декером в Милл-Крик № 1 [2] в Редлендс, Калифорния. [3]
Трехфазные асинхронные двигатели переменного тока
Трехфазные асинхронные двигатели переменного тока мощностью 1 л.с. (746 Вт) и 25 Вт с небольшими двигателями от проигрывателя компакт-дисков, игрушек и привода считывателя компакт-дисков и DVD-дисков.Там, где имеется многофазный источник питания, обычно используется трехфазный (или многофазный) асинхронный двигатель переменного тока, особенно для двигателей большей мощности.Разность фаз между тремя фазами многофазного источника питания создает вращающееся электромагнитное поле в двигателе.
Благодаря электромагнитной индукции вращающееся магнитное поле индуцирует ток в проводниках в роторе, который, в свою очередь, создает уравновешивающее магнитное поле, которое заставляет ротор вращаться в направлении вращения поля. Ротор всегда должен вращаться медленнее, чем вращающееся магнитное поле, создаваемое многофазным источником питания; в противном случае в роторе не будет создаваться уравновешивающее поле.
Асинхронные двигателиявляются «рабочими лошадками» промышленности, и двигатели мощностью до 500 кВт производятся в строго стандартизированных типоразмерах, что делает их почти полностью взаимозаменяемыми между производителями (хотя стандартные размеры в Европе и Северной Америке различаются). Очень большие синхронные двигатели могут иметь выходную мощность в десятки тысяч кВт для трубопроводных компрессоров и приводов в аэродинамической трубе.
В асинхронных двигателях используются два типа роторов.
Роторы с короткозамкнутым ротором: В большинстве двигателей переменного тока используется ротор с короткозамкнутым ротором, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока.Беличья клетка получила свое название от своей формы — кольца на обоих концах ротора, с перемычками, соединяющими кольца по всей длине ротора. Обычно это литой алюминий или медь, залитые между железными пластинами ротора, и обычно видны только концевые кольца. Подавляющее большинство токов ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Очень низкие напряжения при очень высоких токах типичны для шин и концевых колец; В двигателях с высоким КПД часто используется литая медь для уменьшения сопротивления ротора.
В работе двигатель с короткозамкнутым ротором можно рассматривать как трансформатор с вращающейся вторичной обмоткой — когда ротор не вращается синхронно с магнитным полем, индуцируются большие токи ротора; большие токи ротора намагничивают ротор и взаимодействуют с магнитными полями статора, чтобы синхронизировать ротор с полем статора. Двигатель с короткозамкнутым ротором без нагрузки при синхронной скорости будет потреблять электроэнергию только для поддержания скорости ротора с учетом потерь на трение и сопротивление; по мере увеличения механической нагрузки будет увеличиваться и электрическая нагрузка — электрическая нагрузка по своей природе связана с механической нагрузкой.Это похоже на трансформатор, где электрическая нагрузка первичной обмотки связана с электрической нагрузкой вторичной обмотки.
Вот почему, например, электродвигатель вентилятора с короткозамкнутым ротором может приводить к затемнению света в доме при запуске, но не приглушает свет, когда его вентиляторный ремень (и, следовательно, механическая нагрузка) снимается. Кроме того, остановившийся двигатель с короткозамкнутым ротором (перегруженный или с заклинившим валом) будет потреблять ток, ограниченный только сопротивлением цепи, при попытке запуска. Если что-то еще не ограничивает ток (или не отключает его полностью), вероятным результатом является перегрев и разрушение изоляции обмотки.
Практически каждая стиральная машина, посудомоечная машина, отдельный вентилятор, проигрыватель и т. Д. Использует какой-либо вариант двигателя с короткозамкнутым ротором.
Ротор с обмоткой: Альтернативная конструкция, называемая ротором с обмоткой, используется, когда требуется регулировка скорости. В этом случае ротор имеет такое же количество полюсов, что и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки подключают контактные кольца к внешнему контроллеру, например, к переменному резистору, который позволяет изменять скорость скольжения двигателя.В некоторых мощных приводах с регулируемой скоростью вращения ротора энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор.
По сравнению с роторами с короткозамкнутым ротором, двигатели с фазным ротором дороги и требуют обслуживания контактных колец и щеток, но они были стандартной формой для регулирования скорости до появления компактных силовых электронных устройств. Транзисторные инверторы с частотно-регулируемым приводом теперь могут использоваться для управления скоростью, а двигатели с фазным ротором становятся все реже.(Транзисторные инверторные приводы также позволяют использовать более эффективные трехфазные двигатели, когда доступен только однофазный сетевой ток, но это никогда не используется в бытовых приборах, потому что это может вызвать электрические помехи и из-за высоких требований к мощности. )
Используются несколько способов запуска многофазного двигателя. Там, где допустимы большой пусковой ток и высокий пусковой момент, двигатель можно запустить через линию, подав полное линейное напряжение на клеммы.Там, где необходимо ограничить пусковой пусковой ток (если двигатель большой по сравнению с мощностью короткого замыкания источника питания), используется пуск с пониженным напряжением с использованием последовательных катушек индуктивности, автотрансформатора, тиристоров или других устройств. Иногда используется метод пуска со звезды на треугольник, когда катушки двигателя сначала соединяются звездой для ускорения нагрузки, а затем переключаются на треугольник, когда нагрузка достигает скорости. Этот метод более распространен в Европе, чем в Северной Америке.Транзисторные приводы могут напрямую изменять приложенное напряжение в зависимости от пусковых характеристик двигателя и нагрузки.
Этот тип двигателя становится все более распространенным в тяговых приложениях, таких как локомотивы, где он известен как асинхронный тяговый двигатель.
Скорость двигателя переменного тока определяется в первую очередь частотой сети переменного тока и количеством полюсов в обмотке статора в соответствии с соотношением:
- N с = 120 F / p
где
- N с = Синхронная скорость, в оборотах в минуту
- F = частота переменного тока
- p = Количество полюсов на фазную обмотку
Фактическая частота вращения асинхронного двигателя будет меньше этой расчетной синхронной скорости на величину, известную как скольжение , которая увеличивается с создаваемым крутящим моментом.Без нагрузки скорость будет очень близка к синхронной. При нагрузке стандартные двигатели имеют скольжение 2-3%, специальные двигатели могут иметь скольжение до 7%, а класс двигателей, известный как моментные двигатели , рассчитан на работу при 100% скольжении (0 об / мин / полный останов).
Скольжение двигателя переменного тока рассчитывается по:
- S = ( N s — N r ) / N s
где
- N r = Скорость вращения в оборотах в минуту.
- S = нормализованное скольжение, от 0 до 1.
В качестве примера типичный четырехполюсный двигатель, работающий на частоте 60 Гц, может иметь номинальную мощность на паспортной табличке 1725 об / мин при полной нагрузке, в то время как его расчетная скорость составляет 1800.
Скорость в этом типе двигателя традиционно изменялась за счет наличия дополнительных наборов катушек или полюсов в двигателе, которые можно включать и выключать для изменения скорости вращения магнитного поля. Однако развитие силовой электроники означает, что частота источника питания теперь также может быть изменена, чтобы обеспечить более плавное управление скоростью двигателя.
Трехфазные синхронные двигатели переменного тока
Если соединения с обмотками ротора трехфазного двигателя сняты на контактных кольцах и подают отдельный ток возбуждения для создания непрерывного магнитного поля (или если ротор состоит из постоянного магнита), результат называется синхронным. двигатель, потому что ротор будет вращаться синхронно с вращающимся магнитным полем, создаваемым многофазным источником питания.
Синхронный двигатель также может использоваться в качестве генератора переменного тока.
В настоящее время синхронные двигатели часто приводятся в действие транзисторными частотно-регулируемыми приводами. Это значительно облегчает запуск массивного ротора большого синхронного двигателя. Они также могут запускаться как асинхронные двигатели с использованием обмотки с короткозамкнутым ротором, которая имеет общий ротор: как только двигатель достигает синхронной скорости, в обмотке с короткозамкнутым ротором не индуцируется ток, поэтому он мало влияет на синхронную работу двигателя. помимо стабилизации скорости двигателя при изменении нагрузки.
Синхронные двигатели иногда используются в качестве тяговых двигателей; TGV может быть самым известным примером такого использования.
Однофазные асинхронные двигатели переменного тока
Трехфазные двигатели по своей природе создают вращающееся магнитное поле. Однако, когда доступна только однофазная мощность, вращающееся магнитное поле должно создаваться другими способами. Обычно используются несколько методов.
Обычным однофазным электродвигателем является электродвигатель с расщепленными полюсами, который используется в устройствах, требующих низкого крутящего момента, таких как электрические вентиляторы или другие небольшие бытовые приборы.В этом двигателе небольшие одновитковые медные «затеняющие катушки» создают движущееся магнитное поле. Часть каждого полюса окружена медной катушкой или лентой; индуцированный ток в перемычке противодействует изменению потока через катушку (закон Ленца), так что максимальная напряженность поля перемещается через поверхность полюса в каждом цикле, создавая необходимое вращающееся магнитное поле.
Другой распространенный однофазный двигатель переменного тока — это асинхронный двигатель с расщепленной фазой , обычно используемый в основных бытовых приборах, таких как стиральные машины и сушилки для одежды.По сравнению с двигателями с экранированными полюсами эти двигатели обычно могут обеспечивать гораздо больший пусковой крутящий момент за счет использования специальной пусковой обмотки в сочетании с центробежным переключателем.
В двигателе с расщепленной фазой пусковая обмотка спроектирована с более высоким сопротивлением, чем рабочая обмотка. Это создает цепь LR, которая немного сдвигает фазу тока в пусковой обмотке. Когда двигатель запускается, пусковая обмотка подключается к источнику питания через набор подпружиненных контактов, на которые нажимает еще не вращающийся центробежный переключатель.Пусковая обмотка намотана с меньшим количеством витков провода меньшего диаметра, чем основная обмотка, поэтому она имеет меньшую индуктивность (L) и более высокое сопротивление (R). Более низкое отношение L / R создает небольшой фазовый сдвиг, не более примерно 30 градусов, между потоком, обусловленным основной обмоткой, и потоком пусковой обмотки. Начальное направление вращения можно изменить на обратное, просто поменяв местами соединения пусковой обмотки относительно работающей обмотки.
Фаза магнитного поля в этой пусковой обмотке смещена от фазы сетевого питания, что позволяет создать движущееся магнитное поле, которое запускает двигатель.Когда двигатель достигает скорости, близкой к расчетной, срабатывает центробежный выключатель, размыкая контакты и отсоединяя пусковую обмотку от источника питания. В этом случае двигатель работает только на ходовой обмотке. Пусковую обмотку необходимо отключить, так как это приведет к увеличению потерь в двигателе.
В конденсаторном пусковом двигателе пусковой конденсатор вставлен последовательно с пусковой обмоткой, создавая LC-цепь, способную к гораздо большему фазовому сдвигу (и, следовательно, гораздо большему пусковому крутящему моменту).Конденсатор, естественно, увеличивает стоимость таких двигателей.
Другой вариант — это двигатель с постоянным разделенным конденсатором (PSC) (также известный как конденсаторный двигатель запуска и работы). Этот двигатель работает аналогично двигателю с конденсаторным пуском, описанному выше, но здесь нет переключателя центробежного пуска, а вторая обмотка постоянно подключена к источнику питания. Двигатели PSC часто используются в кондиционерах, вентиляторах и воздуходувках, а также в других случаях, когда требуется регулируемая скорость. Изменяя ответвления на ходовой обмотке, но сохраняя постоянную нагрузку, двигатель можно заставить работать с разными скоростями.Также при условии, что все 6 соединений обмоток доступны по отдельности, трехфазный двигатель может быть преобразован в двигатель для запуска и запуска конденсатора путем объединения двух обмоток и подключения третьей через конденсатор для работы в качестве пусковой обмотки.
Отталкивающие двигатели — однофазные двигатели переменного тока с фазным ротором, аналогичные универсальным двигателям. В отталкивающем двигателе щетки якоря закорочены вместе, а не соединены последовательно с полем. Было изготовлено несколько типов отталкивающих двигателей, но наиболее часто использовался асинхронный двигатель с отталкивающим пуском (RS-IR).Двигатель RS-IR имеет центробежный переключатель, который закорачивает все сегменты коммутатора, так что двигатель работает как асинхронный двигатель после разгона до полной скорости. Двигатели RS-IR используются для обеспечения высокого пускового момента на ампер в условиях низких рабочих температур и плохого регулирования напряжения источника. По состоянию на 2006 год продано немного отталкивающих двигателей любого типа.
Однофазные синхронные двигатели переменного тока
Небольшие однофазные двигатели переменного тока также могут быть спроектированы с намагниченными роторами (или несколькими вариантами этой идеи).Роторы в этих двигателях не требуют индуцированного тока, поэтому они не скользят назад против частоты сети. Вместо этого они вращаются синхронно с частотой сети. Из-за высокой точности скорости такие двигатели обычно используются для питания механических часов, проигрывателей виниловых дисков и ленточных накопителей; раньше они также широко использовались в приборах точного времени, таких как ленточные самописцы или механизмы привода телескопов. Синхронный двигатель с расщепленными полюсами — это одна из версий.
Поскольку инерция затрудняет мгновенное ускорение ротора с остановленной до синхронной скорости, этим двигателям обычно требуется какая-то специальная функция для запуска.В различных конструкциях используется небольшой асинхронный двигатель (который может использовать те же катушки возбуждения и ротор, что и синхронный двигатель) или очень легкий ротор с односторонним механизмом (чтобы гарантировать, что ротор запускается в «прямом» направлении).
Моментные двигатели
Моментный двигатель — это особый вид асинхронного двигателя, который может работать неограниченное время при остановке (с заблокированным от вращения ротором) без повреждений. В этом режиме двигатель будет прикладывать постоянный крутящий момент к нагрузке (отсюда и название).Обычное применение моментного двигателя — это двигатели подающей и приемной катушек в ленточном накопителе. В этом приложении, приводимом в действие низким напряжением, характеристики этих двигателей позволяют приложить к ленте относительно постоянное легкое натяжение независимо от того, протягивает ли ведущий ленту мимо головок ленты. Управляемые более высоким напряжением (и, следовательно, обеспечивающие более высокий крутящий момент), моментные двигатели также могут работать в режиме быстрой перемотки вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты.
Шаговые двигатели
- Основная статья: Шаговый двигатель
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты или большой железный сердечник с выступающими полюсами, управляется набором внешних магнитов, которые переключаются электронно. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, в его применении двигатель не может вращаться непрерывно; вместо этого он «шагает» от одного положения к другому, когда обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности ротор может вращаться вперед или назад.
Простые драйверы шаговых двигателей полностью включают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому» перемещению в ограниченное количество положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться «между» точками «шестеренки» и, таким образом, вращаться чрезвычайно плавно.Шаговые двигатели с компьютерным управлением — одна из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигателиможно легко поворачивать на определенный угол, и, следовательно, шаговые двигатели используются в компьютерных дисководах, где высокая точность, которую они предлагают, необходима для правильного функционирования, например, жесткого диска или привода компакт-дисков.
Бесщеточные двигатели постоянного тока
- Основная статья: Бесщеточный электродвигатель постоянного тока
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору.Это создает трение. На более высоких скоростях щеткам становится все труднее поддерживать контакт. Щетки могут отскакивать от неровностей поверхности коллектора, создавая искры. Это ограничивает максимальную скорость машины. Плотность тока на единицу площади щеток ограничивает мощность двигателя. Неидеальный электрический контакт также вызывает электрические помехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию. Сборка коммутатора на большой машине — дорогостоящий элемент, требующий точной сборки многих деталей.
Эти проблемы устранены в бесщеточном двигателе. В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением двигателя. Бесщеточные двигатели обычно имеют КПД 85-90%, тогда как двигатели постоянного тока с щеткой обычно имеют КПД 75-80%.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями находится область бесщеточных двигателей постоянного тока. Построенные аналогично шаговым двигателям, они часто используют внешний ротор с постоянным магнитом , три фазы управляющих катушек, одно или несколько устройств на эффекте Холла для определения положения ротора и соответствующую приводную электронику.Катушки активируются, одна фаза за другой, электроникой привода в соответствии с сигналами датчиков Холла. По сути, они действуют как трехфазные синхронные двигатели, содержащие собственную электронику частотно-регулируемого привода. В специализированном классе контроллеров бесщеточных двигателей постоянного тока для определения положения и скорости используется обратная связь по ЭДС через основные фазовые соединения вместо датчиков Холла. Эти двигатели широко используются в электромобилях с радиоуправлением.
Бесщеточные двигатели постоянного токаобычно используются там, где требуется точное управление скоростью, в дисководах компьютеров или в кассетных видеомагнитофонах, когда шпиндели в компакт-дисках, компакт-дисках (и т. Д.)) приводы и механизмы в офисных продуктах, таких как вентиляторы, лазерные принтеры и копировальные аппараты. Они имеют ряд преимуществ перед обычными двигателями:
- По сравнению с вентиляторами переменного тока, использующими двигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные двигатели переменного тока. Такой холодный режим работы приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор.Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; без коммутатора или щеток бесщеточный двигатель может использоваться в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же устройства на эффекте Холла, которые обеспечивают коммутацию, также могут обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением). В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен».
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость.
- Щеточные двигатели нельзя использовать в космическом вакууме, потому что они привариваются к неподвижному положению.
Современные бесщеточные двигатели постоянного тока имеют мощность от долей ватта до многих киловатт. В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт. Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Двигатели постоянного тока без сердечника
Ничто в конструкции любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались; крутящий момент действует только на обмотки электромагнитов.Этим фактом пользуется бесщеточный электродвигатель постоянного тока , специализированная форма щеточного электродвигателя постоянного тока. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра внутри магнитов статора, корзины, окружающей магниты статора, или плоского блинчика (возможно, сформированного на печатной монтажной плате), проходящего между верхним и нижним магнитами статора. Обмотки обычно стабилизируются путем пропитки эпоксидной смолой.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс. Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом.
Эти двигатели обычно использовались для привода приводов магнитных лентопротяжных устройств и до сих пор широко используются в высокопроизводительных системах с сервоуправлением.
Двигатели линейные
Линейный двигатель — это, по сути, электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает линейную силу по всей своей длине, создавая бегущее электромагнитное поле.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Вы можете найти линейный двигатель в поезде на магнитной подвеске (Transrapid), где поезд «летит» над землей.
Нано мотор
Наномотор, сконструированный Калифорнийским университетом в Беркли.Диаметр двигателя составляет около 500 нм: в 300 раз меньше диаметра человеческого волоса.Исследователи из Калифорнийского университета в Беркли разработали подшипники вращения на основе многослойных углеродных нанотрубок. Прикрепив золотую пластину (размером порядка 100 нм) к внешней оболочке подвешенной многослойной углеродной нанотрубки (например, вложенных углеродных цилиндров), они могут электростатически вращать внешнюю оболочку относительно внутреннего ядра. Эти подшипники очень прочные; Устройства колебались тысячи раз без признаков износа.Работа была сделана на месте в SEM. Эти наноэлектромеханические системы (НЭМС) являются следующим шагом в миниатюризации, которая в будущем может найти применение в коммерческих целях.
Примечание: тонкая вертикальная нить посередине — это нанотрубка, к которой прикреплен ротор. Когда внешняя трубка разрезана, ротор может свободно вращаться на подшипнике из нанотрубок.
На этом рендере можно увидеть процесс и технологию.
См. Также
Компоненты:
Ученые и инженеры:
Заявки:
Другое:
Внешние ссылки
Учебники
- Шейнфилд Д.J., Industrial Electronics for Engineers, Chemists, and Technician, William Andrew Publishing, Norwich, NY, 2001. Самоучитель, в котором кратко рассматриваются электродвигатели, трансформаторы, регуляторы скорости, коды проводки и заземление, транзисторы, цифровые, и т. д. Легко читать и понимать, вплоть до элементарного уровня по каждому предмету, не подходящий справочник для технологов, уже работающих в любой из этих областей.
- Fitzgerald / Kingsley / Kusko (Fitzgerald / Kingsley / Umans в более поздние годы), * Electric Machinery , классический текст для младших и старших студентов-электриков.Первоначально опубликовано в 1952 году, 6-е издание опубликовано в 2002 году. Авторы по-прежнему указаны как Фицджеральд / Кингсли / Уманс, хотя Фицджеральд и Кингсли уже скончались.
- Bedford, B.D .; Hoft, R.G. и др. (1964). Принципы инверторных схем . Нью-Йорк: John Wiley & Sons, Inc .. 0 471 06134 4. (цепи инвертора используются для управления скоростью двигателя с переменной частотой)
- Б. Р. Пелли, «Тиристорные преобразователи с фазовым управлением и циклоконвертеры: работа, управление и производительность» (Нью-Йорк: Джон Вили, 1971).
Список литературы
- Дональд Г. Финк и Х. Уэйн Бити, Стандартное руководство для инженеров-электриков , одиннадцатое издание , МакГроу-Хилл, Нью-Йорк, 1978, ISBN 007020974X.
- Эдвин Дж. Хьюстон и Артур Кеннелли, Последние типы динамо-электрических машин , авторское право American Technical Book Company 1897, опубликовано P.F. Кольер и сыновья Нью-Йорк, 1902 год
- Купхальдт, Тони Р. (2000–2006). «Глава 13 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА», Уроки электрических цепей — Том II .Проверено 11 апреля 2006.
- А. О. Смит: переменного и постоянного тока электродвигателей. Проверено 11 апреля 2006.
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏 吴江
中
Германия Электронная почта
максон мотор gmbh
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
maxon precision motor India Pvt.ООО
Niran Arcade, № 563/564
Новая Бел Роуд,
RMV 2-я ступень
Бангалор — 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Электронная почта
максон мотор великобритания, лтд
Maxon House, Хогвуд-лейн,
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
Прецизионные двигатели maxon, inc.
125 Девер Драйв
Тонтон, Массачусетс 02780
США
США (Западное побережье) Электронная почта
Прецизионные двигатели maxon, inc.
1065 East Hillsdale Blvd,
Люкс 210
Фостер-Сити, Калифорния 94404
США
Франция Электронная почта
максон Франция
201 — 715 rue du Chat Botté
ZAC des Malettes
01700 Beynost
Франция
— Викисловарь
Английский [править]
Этимология [править]
шаг + -er
Существительное [править]
шаговый ( во множественном числе шаговый )
- Человек или животное, которые ступают, особенно энергично или высоко.
- 1872 , Фанни Ферн, Каперсовый соус: Том болтовни о мужчинах, женщинах и вещах :
Я удивляюсь, что эти степперы на цветах по-детски не предусматривают скрытых под ними ловушек их.
- 1872 , Фанни Ферн, Каперсовый соус: Том болтовни о мужчинах, женщинах и вещах :
- Танцовщица. (Можем ли мы добавить пример этого смысла?)
- 2020 , Moneybagg Yo, Match My Fly
- Вы напоминаете мне мой шаговый двигатель , потому что я знаю, что вы собираетесь скользить
- 2020 , Moneybagg Yo, Match My Fly
- Разновидность электродвигателя (шагового двигателя), который движется ступенчато, а не плавно.
- Устройство, используемое при производстве микросхем для многократного нанесения фотолитографического изображения через равные промежутки времени (путем визуализации, перемещения шага и повторения).
- Вид тренажера.
- Все, что движется или продвигается ступенчато.
- 2013 , Мэтью Дэвид, HTML5: Разработка многофункциональных интернет-приложений (стр. 58)
- Поле «Возраст» представляет собой числовой инструмент шагового двигателя , который позволяет прокручивать определенный диапазон чисел.
- 2013 , Мэтью Дэвид, HTML5: Разработка многофункциональных интернет-приложений (стр. 58)
- (Великобритания, устарело, сленг, исторический) Тюремная беговая дорожка.
- 1883 , Рассол Джорджа Аткинса, Король нищих (стр. 164)
- На беговой дорожке мы были заперты в маленьких коробках, почти полностью темных, а поручень, за который нужно держаться, когда ступала по мельнице, был так высок […] Однажды утром я категорически отказался идти на шаговом двигателе на заявление о болезни, […]
- 1883 , Рассол Джорджа Аткинса, Король нищих (стр. 164)
Анаграммы [править]
Существительное [править]
шаговый c
- неопределенное множественное число от степь
Норвежский букмол [править]
Существительное [править]
шаговый м
- неопределенное множественное число от степь
норвежский нюнорск [править]
Существительное [править]
шаговый f
- неопределенное множественное число от степь
Детали конструкции шагового двигателя
Что такое шаговый двигатель? Виды, конструкция, эксплуатация…
16.12.2016 Построение шагового двигателя. На сегодняшнем рынке доступно несколько типов шаговых двигателей с широким диапазоном размеров, количества шагов, конструкций, проводки, зубчатой передачи и других электрических характеристик. Поскольку эти двигатели могут работать в дискретном режиме, они хорошо подходят для взаимодействия с устройствами цифрового управления, такими как компьютеры.
ПодробнееШаговые двигатели: конструкция, работа, виды и их …
24.10.2013 Конструкция шаговых двигателей.В этом двигателе есть мягкое железо, которое заключено через электромагнитные статоры. Полюса статора и ротора не зависят от типа шагового двигателя. Как только статоры этого двигателя находятся под напряжением, ротор будет вращаться, чтобы выровняться со статором, в противном случае поворачивается, чтобы иметь наименьший зазор через статор. Таким образом, статоры …
ПодробнееШаговый двигатель: работа, конструкция, типы и привод …
18.03.2020 Конструкция шагового двигателя очень похожа на двигатель постоянного тока.Он также имеет постоянный магнит в качестве ротора. Ротор будет в центре и будет вращаться, когда на него будет действовать сила. Этот ротор окружен множеством статоров, которые намотаны на него магнитной катушкой. Статор будет размещен как можно ближе к ротору, чтобы магнитные поля в статорах могли влиять на движение ротора. Для управления …
ПодробнееШаговый двигатель: работа, конструкция, типы, преимущества …
01/12/2018 Шаговый двигатель: конструкция: Шаговый двигатель состоит из статора и ротора.Ротор — подвижная часть, не имеющая обмотки, щеток и коллектора. Статор состоит из многополюсной и многофазной обмотки, обычно из трех или четырех фаз обмотки, намотанной на необходимое количество полюсов, определяемое желаемым угловым смещением на входные импульсы. Работа: Шаговый двигатель работает на
Подробнее Шаговые двигатели: типы, применение и принцип работы …
Типы и конструкция шаговых двигателей. Характеристики шагового двигателя — как с точки зрения разрешения (или размера шага), так и скорости и крутящего момента — зависят от деталей конструкции, которые в то же время могут также влиять на то, как можно управлять двигателем.На самом деле, не все шаговые двигатели имеют одинаковую внутреннюю структуру (или конструкцию), так как ротор и статор различаются …
ПодробнееШаговый двигатель — Википедия
Шаговый двигатель, также известный как шаговый … Существуют дополнительные спецификации для описания шаговых двигателей, и такие подробности можно найти в стандарте ICS 16-2001 (раздел 4.3.1.1). На сайте Reprap есть также полезные сводки и дополнительная информация. Приложения. Шаговые двигатели с компьютерным управлением — это разновидность системы позиционирования с управлением движением.Как правило, они управляются цифровым …
ПодробнееШаговый двигатель: работа, конструкция, типы и
18.03.2020 Конструкция шагового двигателя очень похожа на двигатель постоянного тока. Он также имеет постоянный магнит в качестве ротора. Ротор будет в центре и будет вращаться, когда на него будет действовать сила. Этот ротор окружен несколькими статорами, намотанными магнитной катушкой.
ПодробнееШаговый двигатель — Википедия
Шаговый двигатель, также известный как шаговый двигатель или шаговый двигатель, представляет собой бесщеточный электродвигатель постоянного тока, который делит полное вращение на количество равных ступеней.Затем можно дать команду двигателю перемещаться и удерживаться на одном из этих этапов без какого-либо датчика положения для обратной связи (контроллер с разомкнутым контуром), пока двигатель
БольшеШаговые двигатели, их типы, конструкция И
Гибрид Шаговый двигатель дороже, чем шаговый двигатель с постоянными магнитами, но обеспечивает лучшую производительность в отношении шагового разрешения, крутящего момента и скорости. Типичный угол шага шагового двигателя HB составляет от 3,6 ° до 0,9 ° (100–400 шагов на оборот).Гибридный шаговый двигатель сочетает в себе лучшие характеристики шаговых двигателей PM и VR. Ротор имеет несколько зубцов, как и VR …
ПодробнееШаговый двигатель: основы, типы и работа
Шаговый двигатель или шаговый двигатель — это бесщеточный синхронный двигатель, который делит полное вращение на несколько шагов. В отличие от бесщеточного двигателя постоянного тока, который непрерывно вращается при приложении к нему фиксированного напряжения постоянного тока, шаговый двигатель вращается с дискретными ступенчатыми углами. Таким образом, шаговые двигатели производятся с шагом 12, 24, 72, 144, 180 и 200 шагов на оборот, что приводит к шагу…
ПодробнееКак работает шаговый двигатель — Electric Diy Lab
15/12/2019 В этом посте мы также увидим, как работает шаговый двигатель, и детали его конструкции. Принцип работы шагового двигателя. В основном шаговые двигатели представляют собой бесщеточные двигатели постоянного тока, обычно ротор с постоянными магнитами расположен между обмоткой статора. Затем обмотка статора включается шаг за шагом в последовательном порядке, чтобы она намагничивалась и вынуждала ротор выравниваться с магнитным полем обмотки статора. в …
ПодробнееШаговые двигатели — введение и принцип работы…
По типу конструкции шаговые двигатели классифицируются как. Шаговый двигатель с переменным сопротивлением (VR); Шаговый двигатель с постоянным магнитом (PM); Гибридный шаговый двигатель; Шаговый двигатель с переменным сопротивлением (VR). Шаговые двигатели с регулируемым сопротивлением имеют ротор, сделанный из ферромагнитных материалов. Следовательно, когда статор возбужден, он становится электромагнитом, и шаговый двигатель
MoreОсновные принципы работы ATO
Выбор шагового двигателя.Угол шага: необходимо выбрать угол шага двигателя в соответствии с требованиями точности нагрузки. Наименьший коэффициент разрешения нагрузки обычно преобразуется в вал двигателя, обратите внимание на угол для каждого коэффициента разрешения, и угол шага двигателя должен быть равен или меньше угла. Как правило, угол шага 2 ..
ПодробнееШаговые двигатели: типы, применение и принцип работы …
Типы и конструкция шаговых двигателей. Характеристики шагового двигателя — как с точки зрения разрешения (или размера шага), так и скорости и крутящего момента — зависят от деталей конструкции, которые в то же время могут также влиять на то, как можно управлять двигателем.На самом деле, не все шаговые двигатели имеют одинаковую внутреннюю структуру (или конструкцию), так как ротор и статор различаются …
ПодробнееЧто такое шаговый двигатель? — Принципы, типы и crontollers
Шаговый двигатель — это бесщеточный синхронный электродвигатель, который преобразует цифровые импульсы в механическое вращение вала. Его нормальное движение вала состоит из дискретных угловых перемещений, по существу, одинаковой величины при питании от последовательно переключаемого источника постоянного тока.Шаговый двигатель — это цифровое устройство ввода-вывода. Это особенно хорошо …
ПодробнееДетали конструкции шагового двигателя
Детали конструкции шагового двигателя. Конструкция шагового двигателя Шаговый двигатель состоит из статора и ротора. Ротор — подвижная часть, не имеющая заводных щеток и коллектора. Какими бы ни были ваши требования, с нашей помощью вы найдете идеальное сервисно-ориентированное решение, соответствующее вашим конкретным потребностям. Мы готовы ответить на ваши вопросы в любое время суток и без выходных, ждем ваших консультаций.Получить цену …
ПодробнееШаговый двигатель, строительный, рабочий, типы
Шаговый двигатель. Выбор между серводвигателем и шаговым двигателем будет довольно проблематичным, поскольку уравновешивание нескольких проектных факторов: соображения стоимости, крутящий момент, скорость, ускорение и схема привода играют важную роль при выборе двигателя для
Подробнее Шаговый двигатель: основы, типы и работа
Шаговый двигатель или шаговый двигатель — это бесщеточный синхронный двигатель, который делит полный оборот на несколько шагов.В отличие от бесщеточного двигателя постоянного тока, который непрерывно вращается при приложении к нему фиксированного напряжения постоянного тока, шаговый двигатель вращается с дискретными ступенчатыми углами. Таким образом, шаговые двигатели производятся с шагом 12, 24, 72, 144, 180 и 200 шагов на оборот, что приводит к шаговым …
ПодробнееКак работают шаговые двигатели? — Объясните, что Stuff
09.04.2020 Базовая конструкция. Я собираюсь упростить шаговые двигатели здесь, чтобы проиллюстрировать простую центральную идею: (внутренний) ротор шагового двигателя вращается на небольшие дискретные значения (шаги), потому что (внешний) статор применяет магнитные импульсы, которые тянут и толкают его. .Фото: Ротор шагового двигателя состоит из двух дисков, соединенных вместе, поэтому мы получаем ряд чередующихся северных и южных полюсов …
ПодробнееОсновные сведения о шаговых двигателях, типы, режимы, подключение, вопросы …
Эти типы шаговых двигателей различаются по конструкции и принципу действия. Каждый тип шагового двигателя предлагает свое решение для приложения. Три основных типа шаговых двигателей включают в себя переменное сопротивление, постоянный магнит и гибридный двигатель. 1. Шаговый двигатель с переменным сопротивлением (VR).Шаговые двигатели с регулируемым сопротивлением известны тем, что имеют несколько роторов из мягкого железа и обмотку …
Подробнее(PDF) Шаговый двигатель — ResearchGate
Существует три типа шаговых двигателей в зависимости от конструкции ротора: (i) Переменное сопротивление. Шаговый двигатель . В этом двигателе используется немагнитный ротор с железным сердечником, обмотка которого повернута …
ПодробнееЧто такое шаговый двигатель с постоянным магнитом? — его работа …
Шаговый двигатель с постоянным магнитом имеет конструкцию статора, аналогичную конструкции односекционного электродвигателя с переменным сопротивлением.Ротор состоит из полюсов постоянного магнита из стали с высокой удерживающей способностью и имеет цилиндрическую форму. Концентрирующие обмотки на диаметрально противоположных полюсах соединены последовательно, образуя двухфазную обмотку на статоре. Полюса ротора совпадают с зубьями статора …
ПодробнееЧто такое шаговый двигатель и как он работает
Знакомство с шаговыми двигателями. Как и все двигатели, шаговые двигатели также имеют статор и ротор, но в отличие от обычного двигателя постоянного тока статор состоит из отдельных наборов катушек.Количество катушек будет отличаться в зависимости от типа шагового двигателя, но пока просто поймите, что в шаговом двигателе ротор состоит из металлических полюсов, и каждый полюс будет притягиваться набором катушек в статоре.
ПодробнееЧто такое шаговый двигатель? Все о шаговых двигателях …
05/05/2014 Шаговые двигатели — это двигатели постоянного тока, которые двигаются дискретными шагами. У них есть несколько катушек, которые организованы в группы, называемые «фазами». Последовательно запитывая каждую фазу, двигатель будет вращаться шаг за шагом.С помощью шагового управления с компьютерным управлением вы можете добиться очень точного позиционирования и / или контроля скорости. По этой причине шаговые двигатели являются предпочтительным выбором для многих высокоточных двигателей …
ПодробнееШаговые двигатели и их принципы работы …
25/07/2012 Шаговый двигатель — это тип двигателя постоянного тока, который имеет полное вращение, разделенное на равное количество шагов.Это тип привода, хорошо совместимый со средствами числового управления, поскольку он, по сути, является электромеханическим преобразователем цифровых импульсов в пропорциональное движение его вала, обеспечивая точное управление скоростью, положением и направлением в режим без обратной связи, без энкодеров…
ПодробнееДетали конструкции шагового двигателя
Детали конструкции шагового двигателя. Конструкция шагового двигателя Шаговый двигатель состоит из статора и ротора. Ротор — подвижная часть, не имеющая заводных щеток и коллектора. Какими бы ни были ваши требования, с нашей помощью вы найдете идеальное сервисно-ориентированное решение, соответствующее вашим конкретным потребностям. Мы готовы ответить на ваши вопросы в любое время суток и без выходных, ждем ваших консультаций. Получить цену …
ПодробнееМотор постоянного тока и мотор-редуктор постоянного тока Основы
Что такое двигатель постоянного тока?
Двигатель постоянного тока (DC) — это вращающееся электрическое устройство, которое преобразует постоянный ток электрической энергии в механическую.Индуктор (катушка) внутри двигателя постоянного тока создает магнитное поле, которое создает вращательное движение, когда на его клемму подается напряжение постоянного тока. Внутри двигателя находится железный вал, обмотанный катушкой с проволокой. Этот вал содержит два фиксированных магнита, северный и южный, с обеих сторон, которые вызывают как силу отталкивания, так и силу притяжения, в свою очередь, создавая крутящий момент. ISL Products разрабатывает и производит как щеточные двигатели постоянного тока, так и бесщеточные двигатели постоянного тока. Мы адаптируем наши двигатели постоянного тока к размерам и характеристикам в соответствии с вашими желаемыми характеристиками.
Узнать больше
Что такое мотор-редуктор постоянного тока?
Редукторный двигатель — это комплексная комбинация двигателя и коробки передач. Добавление зубчатой передачи к двигателю снижает скорость при одновременном увеличении выходного крутящего момента. Наиболее важными параметрами редукторных двигателей являются скорость (об / мин), крутящий момент (фунт-дюйм) и КПД (%). Чтобы выбрать наиболее подходящий мотор-редуктор для вашего приложения, вы должны сначала вычислить требования к нагрузке, скорости и крутящему моменту для вашего приложения.ISL Products предлагает широкий выбор цилиндрических мотор-редукторов, планетарных мотор-редукторов и червячных мотор-редукторов, отвечающих всем требованиям. Большинство наших двигателей постоянного тока можно дополнить одним из наших уникальных редукторов, что позволит вам получить высокоэффективный мотор-редуктор.
Магазин на Digi-Key
Процесс выбора двигателя
Нужна помощь в выборе двигателя, подходящего для вашего применения? Ознакомьтесь с нашим Руководством по выбору двигателя.
Процесс выбора двигателя на этапе концептуального проектирования может быть сложной задачей, но наши инженеры всегда готовы помочь.Мы обеспечиваем консьерж-сервис для всех наших проектов двигателей постоянного тока и мотор-редукторов. Наша команда инженеров работает с вами, чтобы предоставить оптимальное компонентное решение. Следующие ключевые моменты могут помочь вам определить и выбрать наиболее подходящий двигатель или мотор-редуктор для нашего применения.
- Требования к дизайну — Этап оценки проекта, на котором изучаются требования к разработке продукта, параметры дизайна, функциональность устройства и оптимизация продукта.
- Расчет конструкции — Расчеты, используемые для определения двигателя, который будет лучшим решением для вашего приложения. Конструктивные расчеты определяют передаточное число, крутящий момент, вращающуюся массу, коэффициент эксплуатации, радиальную нагрузку и анализ испытаний.
- Типы двигателей постоянного тока / мотор-редукторы — Наиболее распространенные электродвигатели преобразуют электрическую энергию в механическую. Эти типы двигателей питаются от постоянного тока (DC).
- Технические характеристики двигателя — После выполнения расчетных расчетов и определения параметров приложения вы можете использовать эти данные, чтобы определить, какой двигатель или мотор-редуктор лучше всего подойдет для вашего приложения.Вот некоторые из наиболее распространенных характеристик, которые следует учитывать при выборе двигателя или мотор-редуктора:
- Напряжение
- Текущий
- Мощность
- Момент
- об / мин
- Ожидаемый срок службы / рабочий цикл
- Вращение (по часовой или против часовой стрелки)
- Диаметр и длина вала
- Ограничения корпуса
Связаться с инженерным отделом
Кривые рабочих характеристик мотор-редуктора
Характеристики двигателейA и коробки передач объединены в один график с отображением трех конкретных параметров.Этими тремя параметрами являются скорость, крутящий момент и эффективность. Эти характеристики важны при выборе мотор-редуктора для вашего приложения.
Скорость / обороты (Н) — ( единицы: об / мин) обозначен прямой линией, которая показывает соотношение между крутящим моментом редукторного двигателя и скоростью. Эта линия будет смещаться в сторону в зависимости от увеличения или уменьшения напряжения.
- КПД (η) — ( единица:%) вычисляется по входным и выходным значениям, представленным пунктирной линией.Чтобы максимизировать потенциал мотор-редуктора, его следует использовать с максимальной эффективностью.
- Крутящий момент (T) — ( единица: gf-cm) это нагрузка на вал двигателя, представленная на оси X.
- Ток (I) — ( единица: A) обозначен прямой линией, от холостого хода до полной блокировки двигателя. Это показывает соотношение между силой тока и крутящим моментом.
- Мощность (P) — (единица измерения: Вт) — это количество механической энергии, которую передает мотор-редуктор.
Как считывать кривые производительности
Например, давайте рассмотрим кривую производительности ниже (рис. 5) для мотор-редуктора постоянного тока.
- Максимальный рабочий КПД (70%) для этого двигателя достигается при 3,75 фунт-дюйм / 2100 об / мин.
- По мере увеличения крутящего момента скорость и КПД снижаются. Результатом повышенного крутящего момента является плохая выходная мощность, и устройство в конечном итоге перестанет работать, когда двигатель достигнет крутящего момента при остановке (18 фунт-дюймов).
являются полезным инструментом при выборе двигателя для вашей области применения. Чтобы получить максимальную отдачу от кривых производительности, важно досконально понимать требования приложений. Вы можете использовать свои требования к нагрузке и скорости, чтобы определить требуемый крутящий момент. Большинство производителей двигателей постоянного тока и мотор-редукторов предоставляют кривые характеристик по запросу.
Как узнать, какой у меня шаговый двигатель: униполярный или биполярный?
У вас есть двигатель третьего типа: Универсальный двигатель.
Этот двигатель может быть сконфигурирован как , — однополярный или биполярный.
Общие правила:
- 4 провода: только биполярный
- 5 проводов: только однополярный
- 6 проводов: универсальный
- 8 проводов: универсальный
У униполярного двигателя только центры обеих обмоток соединены между собой внутри. Это исключает использование двигателя в биполярной системе.
У двигателя с шестью выводами, если вы соедините выводы из центра каждой обмотки вместе, вы получите униполярный двигатель.Если вы оставите центральные соединения неподключенными и управляете каждой обмоткой, используя только соединения с концами обмотки, вы используете его в биполярном режиме.
Если у вашего шагового двигателя шесть проводов, его можно использовать в качестве униполярного двигателя, потому что у вас есть 2 * 3 провода, где один из трех проводов (каждый) является центральным отводом, а два других провода — одним или другим концом одного и того же. обмотка началась с этого центрального крана. См. Соответствующий раздел статьи в Википедии о степперах.
Биполярные двигатели имеют четыре провода; по два на каждую обмотку.Чтобы изменить полярность одной обмотки, вы электронным способом переключаете ее на обратное, вместо того, чтобы переключать один или другой конец обмотки с центральным отводом.
Также есть моторы с восемью проводами. Они имеют четыре обмотки, которые могут быть соединены последовательно, как биполярный двигатель с центральным отводом, или параллельно, как униполярный двигатель.
Вот ссылка на хорошо написанный пример таблицы данных. В нем подробно описано, как можно настроить шаговый двигатель двухполюсным или однополярным способом. Вы можете понять, насколько готовые однополярные или биполярные двигатели с шестью, пятью или четырьмя проводами на самом деле являются просто экономичными или экономящими место «проводниками» по сравнению с гибкими восьмипроводными двигателями.
Совет: используйте омметр, чтобы определить, какие три провода принадлежат друг другу. Чтобы увидеть, как настроена полярность (какой центральный отвод? Какой конец какой?), Подключите осциллограф как минимум с двумя каналами и проверните двигатель вручную.
[PDF] Синхронный двигатель. Тип. Двигатели без возбуждения
1 Синхронный двигатель Синхронный электродвигатель — это двигатель переменного тока, в котором скорость вращения вала синхронизирована …
Синхронный двигатель Синхронный электродвигатель — это двигатель переменного тока, в котором скорость вращения вала синхронизирована с частотой переменного тока питания; период вращения в точности равен целому числу циклов переменного тока.Синхронные двигатели содержат электромагниты на статоре двигателя, которые создают магнитное поле, которое вращается во времени с колебаниями сетевого тока. Ротор вращается синхронно с этим полем с той же скоростью. Другими словами, двигатель не полагается на «скольжение» в обычных рабочих условиях и в результате вырабатывает крутящий момент на синхронной скорости. Синхронные двигатели можно сравнить с асинхронными двигателями, которые должны проскальзывать, чтобы создавать крутящий момент. Скорость синхронного двигателя определяется количеством магнитных полюсов и частотой сети.Синхронный двигатель-генератор для преобразования переменного тока в постоянный.
Pels Tech-Sathy
Синхронные двигатели доступны в размерах от субфракционных самовозбуждаемых до мощных промышленных размеров с возбуждением постоянным током. В диапазоне дробных лошадиных сил большинство синхронных двигателей используются там, где требуется точная постоянная скорость. В промышленных типоразмерах с высокой мощностью синхронный двигатель выполняет две важные функции. Во-первых, это высокоэффективное средство преобразования энергии переменного тока в работу.Во-вторых, он может работать с опережающим или единичным коэффициентом мощности и тем самым обеспечивать коррекцию коэффициента мощности.
Тип Существует два основных типа синхронных двигателей: «без возбуждения» и «с возбуждением от постоянного тока», которые не имеют возможности самозапуска для достижения синхронизма без дополнительных средств возбуждения, таких как электронное управление или индукция. Благодаря недавним достижениям в области независимого бесщеточного управления возбуждением обмотки ротора, который устраняет зависимость от скольжения для работы, «бесщеточная электрическая машина с двойным питанием из обмотанного ротора» является третьим типом синхронного двигателя со всеми теоретическими качествами синхронного двигателя и Комбинированный двигатель с фазным ротором и двойным питанием, такой как коррекция коэффициента мощности, максимальная плотность мощности, максимальная плотность потенциального крутящего момента, недорогой электронный контроллер, максимальная эффективность и т. д.
Двигатели без возбуждения В двигателях без возбуждения ротор изготовлен из прочной стали. На синхронной скорости он вращается синхронно с вращающимся магнитным полем статора, поэтому через него проходит почти постоянное магнитное поле. Внешнее поле статора намагничивает ротор, создавая магнитные полюса, необходимые для его вращения. Ротор изготовлен из стали с высокой удерживающей способностью, такой как кобальтовая сталь. Они изготавливаются в конструкциях с постоянным магнитом, реактивным сопротивлением и гистерезисом: Электродвигатели с индуктивным сопротивлением: они имеют ротор, состоящий из цельной стальной отливки с выступающими (выступающими) зубчатыми полюсами, то же самое. число полюсов статора.[1] [2] Размер воздушного зазора в магнитной цепи и, следовательно, магнитное сопротивление минимальны, когда полюса выровнены с (вращающимся) магнитным полем статора, и увеличивается с увеличением угла между ними. Это создает крутящий момент, вынуждающий ротор выравниваться с ближайшим полюсом поля статора. Таким образом, при синхронной скорости ротор «заблокирован» относительно вращающегося поля статора. Это не может запустить двигатель, поэтому в полюса ротора обычно встроены обмотки с короткозамкнутым ротором, чтобы обеспечить крутящий момент ниже синхронной скорости.Машина запускается как асинхронный двигатель до тех пор, пока не приблизится к ней. Www.pelstech.com
[защита электронной почты]
9487 617 617
синхронная скорость, когда ротор «втягивается» и фиксируется на поле вращающегося статора. Двигатели с гистерезисом: они имеют сплошной гладкий цилиндрический ротор, отлитый из магнитно «твердой» кобальтовой стали с высокой коэрцитивной силой. [1] [2] Этот материал имеет широкую петлю гистерезиса (высокая удерживающая способность), что означает, что после намагничивания в заданном направлении ему требуется большое обратное магнитное поле для изменения намагниченности.Вращающееся поле статора заставляет каждый небольшой объем ротора испытывать обратное магнитное поле. Из-за гистерезиса фаза намагниченности отстает от фазы приложенного поля. В результате ось магнитного поля, индуцированного в роторе, отстает от оси поля статора на постоянный угол δ, создавая крутящий момент, когда ротор пытается «догнать» поле статора. Пока скорость ротора ниже синхронной, каждая частица ротора испытывает обратное магнитное поле с частотой «скольжения», которое вращает ее вокруг своей петли гистерезиса, заставляя поле ротора отставать и создавать крутящий момент.В роторе имеется двухполюсная перемычка с низким сопротивлением. [2] Когда ротор приближается к синхронной скорости и скольжение достигает нуля, это намагничивается и выравнивается с полем статора, заставляя ротор «блокироваться» с вращающимся полем статора. Основным преимуществом гистерезисного двигателя является то, что, поскольку угол запаздывания δ не зависит от скорости, он развивает постоянный крутящий момент от запуска до синхронной скорости. Следовательно, он самозапускается и не требует индукционной обмотки для его запуска, хотя во многих конструкциях действительно имеется структура проводящей обмотки с короткозамкнутым ротором, встроенная в ротор для обеспечения дополнительного крутящего момента при запуске.
Pels Tech-Sathy
Двигатели с постоянными магнитами: в них встроены постоянные магниты в прочный стальной ротор для создания постоянного магнитного поля. При синхронной скорости эти полюса блокируются вращающимся магнитным полем. Они не запускаются автоматически. Из-за постоянного магнитного поля в роторе они не могут использовать индукционные обмотки для запуска и должны иметь привод статора с регулируемой частотой с электронным управлением. [3] Конструкции реактивных двигателей имеют номинальные характеристики от долей 735 Вт до примерно 22 кВт.Двигатели фракций мощностью 735 Вт обладают низким крутящим моментом и обычно используются в КИПиА. В двигателях со встроенным двигателем с умеренным крутящим моментом используется конструкция с короткозамкнутым ротором и зубчатыми роторами. При использовании источника питания с регулируемой частотой все двигатели в системе привода могут управляться с одинаковой скоростью. Частота источника питания определяет рабочую скорость двигателя. Двигатели с гистерезисом производятся с дробной мощностью в лошадиных силах, в основном как серводвигатели и синхронизирующие двигатели.Двигатели с гистерезисом, более дорогие, чем реактивные, используются там, где требуется точная постоянная скорость.
Двигатели с возбуждением постоянным током Эти двигатели мощностью более 735 Вт требуют подачи постоянного тока через контактные кольца для возбуждения. Постоянный ток может подаваться от отдельного источника или от генератора постоянного тока, непосредственно подключенного к валу двигателя. Контактные кольца и щетки используются для подачи тока к ротору. Полюса ротора соединяются друг с другом и движутся с одинаковой скоростью.Синхронные двигатели подпадают под категорию синхронных машин, в которую также входит генератор переменного тока (синхронный генератор). Эти машины обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время.
Синхронная скорость www.pelstech.com
[email protected]
9487 617 617
«Синхронная скорость» синхронного двигателя — это скорость вращения магнитного поля статора в об / мин. После запуска это также частота вращения двигателя:
, где — частота переменного тока в сети в Гц, а — количество магнитных полюсов на фазу.Например, небольшие трехфазные синхронные двигатели обычно имеют 6 полюсов, организованных как 3 противоположные пары под углом 120 °, каждая пара питается от одной фазы, поэтому p = 2 на фазу. Таким образом, для тока питания 60 Гц синхронная скорость составляет 3600 об / мин. (N.B. ‘p’ также может относиться к парам полюсов, и в этом случае уравнение принимает следующий вид: Скорость вращения = 60 x f / p).
Детали Типичный синхронный двигатель состоит из следующих частей:
Pels Tech-Sathy
Обмотка статора, подключенная к источнику переменного тока, которая создает вращающееся магнитное поле.Ротор, который вращается в поле статора. В машинах с возбуждением он несет обмотку возбуждения, питаемую постоянным током от контактных колец. Эта обмотка представляет собой электромагнит. В машинах без возбуждения ротор представляет собой твердую цилиндрическую стальную отливку, тогда как в двигателях с постоянными магнитами в роторе есть постоянные магниты. В машинах с возбуждением постоянным током контактные кольца на роторе подают постоянный ток на обмотку возбуждения от внешнего источника (некоторые двигатели имеют другие устройства). Рама статора содержит и поддерживает другие части и может включать в себя корпуса подшипников.Большие машины включают в себя дополнительные детали для охлаждения машины, поддержки ротора, смазки и охлаждения подшипников, а также различные защитные и измерительные устройства.
Эксплуатация Работу синхронного двигателя легко представить. Обмотка «статора» при возбуждении многофазным (обычно трехфазным) источником питания создает вращающееся магнитное поле внутри двигателя. Обмотка ротора, которая действует как постоянный магнит, просто сцепляется с вращающимся магнитным полем и вращается вместе с ним.Во время работы, когда ротор блокируется вращающимся магнитным полем, двигатель считается синхронизированным. Когда двигатель работает, скорость двигателя зависит только от частоты питания. Когда нагрузка двигателя увеличивается сверх предельной нагрузки, двигатель выходит из синхронизма, то есть приложенная нагрузка достаточно велика, чтобы вывести обмотку возбуждения из-под вращающегося магнитного поля. Двигатель сразу глохнет после того, как он выпадет из синхронизации.
Методы пуска Небольшие синхронные двигатели могут запускаться без посторонней помощи из-за малой массы ротора и низкого пускового тока, необходимого для быстрого разгона ротора до полной скорости от полной остановки.Синхронные двигатели обычно используются в электромеханических часах с питанием от сети, которые используют частоту линии электропередачи для работы зубчатого механизма с правильной скоростью. Трехфазные и двухфазные (редко) синхронные двигатели естественным образом приводятся во вращение в соответствии с направлением фаз с ступенчатым перекрытием. Однофазные синхронные двигатели, такие как настенные электрические часы, могут свободно вращаться в любом направлении и синхронизироваться с возрастающей и падающей напряженностью поля. Двигатели настенных часов www.pelstech.com
[email protected]
9487 617 617
обычно используют антиреверсивный механизм, поэтому синхронный двигатель не начинает вращать механизм назад.Синхронные двигатели больше определенного размера не являются самозапускающимися двигателями. Это свойство связано с инерцией ротора. При включении источника питания возбуждаются обмотка якоря и обмотки возбуждения. Обмотка якоря мгновенно создает вращающееся магнитное поле, которое вращается с заданной скоростью двигателя. Ротор из-за инерции не будет следовать за вращающимся магнитным полем, а вместо этого действует как синхронный генератор (генератор переменного тока) и создает очень большой противоток, который препятствует вращению.Для преодоления этого сопротивления движению требуется больший ток питания, в результате чего потребляемая мощность настолько велика, что может привести к срабатыванию защиты от перегрузки по току. Для очень больших промышленных синхронных двигателей / генераторов с большими возможностями источника питания может быть возможно разогнать ротор до полной скорости от полной остановки, но как двигатель, так и приводимое оборудование могут быть повреждены из-за почти мгновенного ускорения. Когда синхронные генераторы подключаются и синхронизируются, важно, чтобы они были точно согласованы перед переключением на полный ток, поскольку генератор может оторваться от фундамента или повредить свои внутренние силовые обмотки, действуя как двигатель для ускорения до нужного значения. синхронизация.На практике ротор должен вращаться каким-либо другим способом, близким к синхронной скорости двигателя, чтобы преодолеть инерцию. Как только ротор приближается к синхронной скорости, возбуждается обмотка возбуждения, и двигатель синхронизируется. Для запуска синхронного двигателя используются следующие методы:
Pels Tech-Sathy
Отдельный двигатель (называемый пони-двигателем) используется для приведения в движение ротора до его блокировки в режиме синхронизации. Обмотка возбуждения шунтируется, или устройства, подобные асинхронному двигателю, выполняются таким образом, что синхронный двигатель запускается как асинхронный двигатель и синхронизируется, когда он достигает скоростей, близких к его синхронной скорости.Уменьшая входную электрическую частоту для медленного запуска двигателя, здесь можно использовать частотно-регулируемые приводы, которые имеют схемы выпрямителя-инвертора или схемы циклоконвертера.
Особые свойства Синхронные двигатели демонстрируют некоторые интересные свойства, которые находят применение в коррекции коэффициента мощности. Синхронный двигатель может работать с отстающим, единичным или опережающим коэффициентом мощности. Управление осуществляется с помощью возбуждения поля, как описано ниже: Когда напряжение возбуждения поля уменьшается, двигатель работает с отстающим коэффициентом мощности.Коэффициент мощности, на который двигатель отстает, напрямую зависит от падения напряжения возбуждения. Это состояние называется недовозбуждением. Когда напряжение возбуждения приравнивается к номинальному, двигатель работает с единичным коэффициентом мощности. Когда напряжение возбуждения увеличивается выше номинального, двигатель работает с опережающим коэффициентом мощности. Коэффициент мощности электродвигателя напрямую зависит от увеличения напряжения возбуждения. Это состояние называется перевозбуждением.Самым основным свойством синхронного двигателя является то, что он может использоваться как конденсатор или индуктор. Следовательно, это, в свою очередь, улучшает коэффициент мощности системы. Работа синхронного двигателя с ведущим коэффициентом мощности находит применение в коррекции коэффициента мощности. Обычно все нагрузки, подключенные к сети электроснабжения, работают с запаздывающим коэффициентом мощности, что увеличивает потребление реактивной мощности в сети, что способствует дополнительным потерям. В таких случаях синхронный двигатель без нагрузки подключается к сети и работает с перегрузкой, так что опережающий коэффициент мощности, создаваемый синхронным двигателем, компенсирует существующий отстающий коэффициент мощности в сети, а общий коэффициент мощности приближается к www.pelstech.com
[адрес электронной почты защищен]
9487 617 617
1 (единичный коэффициент мощности). Если в сети поддерживается единичный коэффициент мощности, потери реактивной мощности уменьшаются до нуля, повышая эффективность сети. Эта операция синхронного двигателя в режиме перегрузки для корректировки коэффициента мощности иногда называется синхронным конденсатором. При использовании в составе механических часов точность синхронного двигателя зависит только от средней частоты сети, обеспечиваемой источником питания.Хотя в течение дня может происходить небольшой дрейф частоты, энергетические компании активно регулируют частоту в сети, чтобы часы с механическим приводом не постепенно набирали или теряли время. (Эта тема обсуждается более подробно с цитатами в статье «Частота электросети» в разделе «Стабильность».)
Использование Синхронные двигатели находят применение во всех промышленных приложениях, где необходима постоянная скорость. Повышение коэффициента мощности синхронных конденсаторов.Приложения с низким энергопотреблением включают в себя позиционирующие машины, где требуется высокая точность, и приводы роботов. Сетевые синхронные двигатели используются для электрических часов. Проигрыватели виниловых пластинок
Преимущества Pels Tech-Sathy
Синхронные двигатели имеют следующие преимущества перед несинхронными двигателями: Скорость не зависит от нагрузки при условии, что применяется соответствующий ток возбуждения. Точный контроль скорости и положения с помощью элементов управления разомкнутым контуром, например шаговые двигатели. Они сохранят свое положение, когда постоянный ток подается как на статор, так и на обмотки ротора.Их коэффициент мощности можно отрегулировать до единицы, используя ток возбуждения, соответствующий нагрузке. Кроме того, «емкостной» коэффициент мощности (фаза тока, фаза напряжения, фаза напряжения) может быть получен путем небольшого увеличения этого тока, что может помочь достичь лучшей коррекции коэффициента мощности для всей установки. Их конструкция позволяет повысить электрический КПД, когда требуется низкая скорость (например, в шаровых мельницах и подобных устройствах).