


Система торможения ШД после его отключения
Добрый день.Для владельцев кубиков со столом на ременной передаче, предлагаю вашему вниманию систему притормаживания шагового мотора после его отключения, чтобы избежать падения стола с грохотом.
Принцип работы:
— когда любой из моторов работает или висит в режиме удержания, на порт D6 подается 5в, далее через модуль расширения включается реле на 12в, реле своими контактами соединяет мотор с драйвером.
— когда мотор отключается, то через 1 секунду отключается и реле, и своими контактами отключает мотор от драйвера и замыкает обмотки на тормозные сопротивления, ротор мотора удерживается.
Потребуется:1. Модуль расширения для RAMPS двухканальный
ссылка2. Электромагнитное реле с четырьмя перекидными контактами и обмоткой на 12в
ссылка3. Парочка сопротивлений на 4,7Ом от 0,5 до 2Вт
ссылкаПодключить по схеме выше.
В прошивке Marlin во вкладке configuration_adv.h есть такие строки:
* The fan will turn on automatically whenever any stepper is enabled
* and turn off after a set period after all steppers are turned off.
#define USE_CONTROLLER_FAN
#if ENABLED(USE_CONTROLLER_FAN)
#define CONTROLLER_FAN_PIN 6 // Set a custom pin for the controller fan
#define CONTROLLERFAN_SECS 1 // Duration in seconds for the fan to run after all motors are disabled
#define CONTROLLERFAN_SPEED 255 // 255 == full speed
#endif
необходимо раскоментировать #define USE_CONTROLLER_FAN
и в строке #define CONTROLLER_FAN_PIN указать свободный пин на плате, к которому можно будет подключиться.
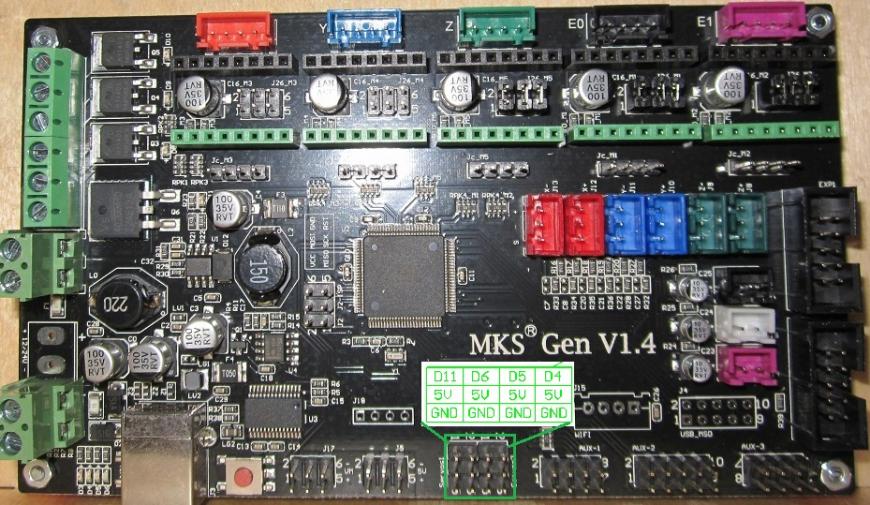
Модуль расширения, если его воткнуть на плату использует порты D6 и D11. Но можно проводками подключиться и к любому другому свободному порту.
Например порт D6 или D11 на плате MKS Gen:
 На плате RAMPS:
На плате RAMPS: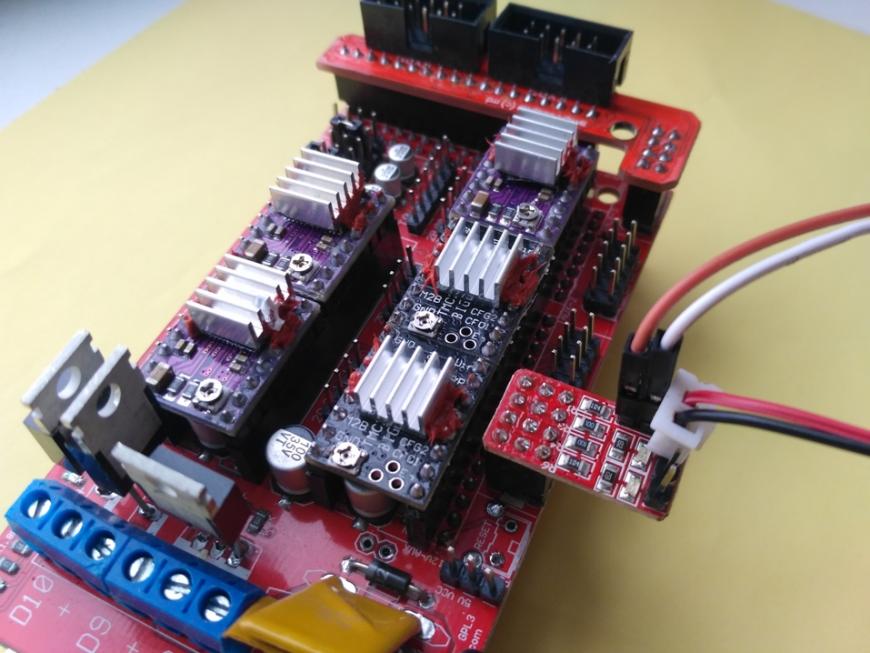
Шаговые двигатели. Принцип работы и управление
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
αш = 360 / Kt * Zр
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной. Кроме того, она требует сложного коммутатора.
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
Шаговые двигатели с тормозом
Шаговые двигатели с электрическим тормозом
Шаговый двигатель с тормозом — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения. Электрический тормоз позволяет фиксировать вал шагового двигателя при обесточенных обмотках. Шаговые двигатели с тормозом широко применяются в станках ЧПУ, системах автоматизации и управляются специальными устройствами — драйверами шагового двигателя. Мы предлагаем шаговые двигатели с тормозом различных размеров (NEMA 17, 23, 34, 43).
Если Вы не нашли в нашем ассортименте необходимый товар — обязательно свяжитесь с нами. Возможно товар находится в пути или мы доставим Вам его под заказ в кратчайшие сроки.
ШД 57мм (NEMA23) с электрическим тормозом
Биполярные шаговые двигатели 57мм (2 обмотки, 4 вывода) с электрическим тормозом. Электрический тормоз управляется постоянным напряжением 24В.
Двигатель шаговый с электрическим тормозом PL57H56-D8B, код p0000010660
PL57H56-D8 + тормоз 24В/0.3A/0.5Н*м
Двигатель шаговый с электрическим тормозом PL57H76-D8B, код p0000005952
PL57H76-D8 + тормоз 24В/0.5A/1.5Н*м
Двигатель шаговый с электрическим тормозом PL57h210-D8В, код p0000008217
PL57h210-D8 + тормоз 24В/0.4A/1Н*м
ШД 86мм (NEMA34) с электрическим тормозом
Биполярные шаговые двигатели 86мм (2 обмотки, 4 вывода) с электрическим тормозом. Электрический тормоз управляется постоянным напряжением 24В.
Двигатель шаговый с электрическим тормозом PL86H75-D14BC, код ER-00002184
PL86H75-D14 + тормоз 24В/0.75A/4Н*м с крышкой
Двигатель шаговый с электрическим тормозом PL86h213-D14BC, код ER-00002183
PL86h213-D14 + тормоз 24В/0.75A/4Н*м с крышкой
С этим товаром покупают:
Выбор шагового двигателя | PureLogic R&D
- Статьи
- Конструирование портальных станков с ЧПУ
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ О РЕЖИМАХ РАБОТЫ ШАГОВОГО ДВИГАТЕЛЯ
Модель работы идеального шагового двигателя
Шаговый двигатель — устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости. Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В идеальном двигателе нет трения, его момент пропорционален амперо-виткам обмоток и единственной электрической характеристикой является индуктивность. Индуктивность L характеризует способность обмотки запасать энергию в магнитном поле. Индуктивности обладают свойством индуктивного сопортивления, т.е. сопротивления переменному току, которое тем больше, чем быстрее меняется ток, а значит, индуктивное сопротивление возрастает вместе со скоростью вращения двигателя. По закону Ома ток прямо пропорционален напряжению и обратно пропорционален полному сопротивлению, откуда следует, что ток обмотки уменьшается при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Электрически, реальный двигатель отличается от идеального в основном ненулевым сопротивлением обмотки, а также ферромагнитными составляющими, которым свойствоенно насыщаться магнитным полем, что приводит к гистерезисным потерям и потерям на вихревые токи. Насыщение ограничивает момент, а вихревые токи и гистерезисные потери вызывают нагрев мотора. Рассмотрим кривую зависимости крутящего момента шагового двигателя от скорости.
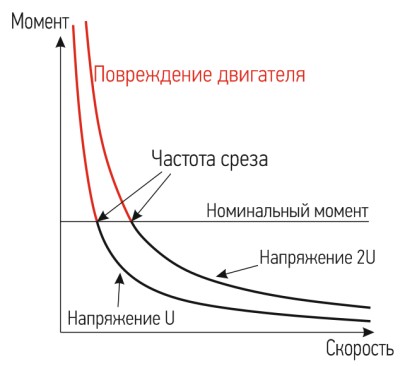
Как видно из графика, при скорости ниже определенного предела, момент, а следовательно и ток, возрастают очень быстро, вплоть до уровней, приводящих к повреждению мотора. Чтобы этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Поскольку момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога — ток будет ограничен индуктивностью обмоток.
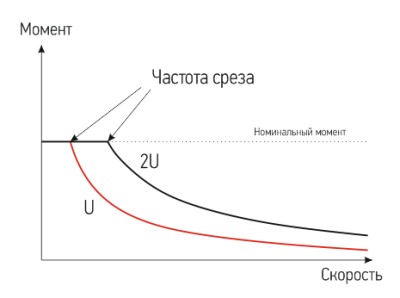
В результате, скорость-моментная характеристика идеального двигателя будет начинаться с отрезка, где момент постоянный, до точки, когда мотор перестанет генерировать и потреблять реактивную мощность. Реальный шаговый двигатель обладает потерями, которые изменяют идеальную скорость-моментную характеристику. Особенно велик вклад момента от зубцовых гармоник магнитного поля(его иногда указывают в документации на двигатель). Потери в двигателе есть всегда, и чем быстрее вращается вал шагового мотора, тем больше потери, и их также необходимо вычитать из идеальной характеристики.
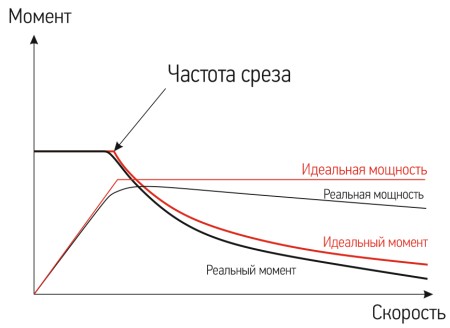
Обратите внимание, как реальная мощность падает вместе с ростом скорости, в том числе и на отрезке «постоянной мощности». Скругление на переходной точке обусловлено переходным процессом в цепи — драйвер постепенно превращается из источника тока в источник напряжения.
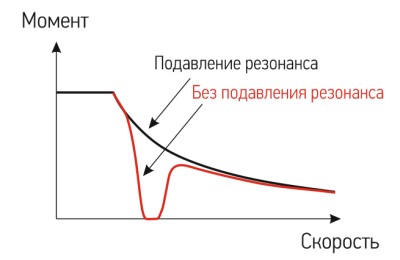
Резонанс на средних частотах
Шаговый двигатель сильно подвержен резонансу, являясь по факту аналогом маятника «подвешенный на пружине груз», где грузом является ротор, а пружиной — магнитное поле, и имеет частоту собственных колебаний, зависящую от силы тока и инерции ротора. В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать сколь-нибудь продолжительное время не удастся – вал остановится. Для устранения этого явления в драйверах используются различные антирезонансные алгоритмы.
Мощность двигателя
Выходная мощность двигателя (скорость×момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим вдвое напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке постоянной мощности вырастет вдвое. С током иная картина. Рисунок ниже показывает, что будет при выставлении на драйвере тока в 2 раза больше номинального для двигателя. Мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах увеличивается менее чем в 2 раза из-за насыщения сердечников обмоток.

Как можно видеть, мощность не увеличивается вовсе. Всегда рекомендуется выставлять ток на драйвере равным номинальному значению для двигателя. Это в том числе снизит вибрации на низких частотах, улучшит характеристики хода в микрошаговом режиме.
Напряжение питания и нагрев двигателя
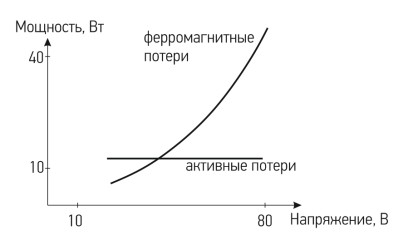
Основные причины нагрева двигателя: потери на сопротивлении обмоток и ферромагнитные потери. Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, — нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Можно сказать, что максимальная полезная мощность шагового двигателя определяется количеством тепла, которое может на нем безопасно выделяться. Поэтому не следует стараться выжать полкиловатта из двигателя 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать разными способами. Эмпирически было получено несколько оценок сверху для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32√ L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные потери для двигателя с номинальными характеристиками 4 А, 3 В.
Кратко о мощности шагового двигателя
Выбор двигателя и питающего напряжения целиком зависят от задач. В идеале, двигатель должен выдавать достаточный момент на максимальной планируемой скорости. Необходимо отличать момент от мощности двигателя: большой момент на низких скоростях не означает, что двигатель мощный. Выходная мощность – другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.с.), в реальности же для этого потребуется 2 или 3 двигателя NEMA 34. Двигатели NEMA 23 слишком малы для отвода тепла, а NEMA 42 из-за размера не подходят по импедансу: если их номинальный ток меньше, чем 7 А, то напряжение будет больше 80 В, и наоборот. Момент от зубцовых гармоник в моторах NEMA 42 существенно больше, чем в малых моторах, и обязательно должен быть учтен при расчете выходной мощности. Другими словами, выходная мощность двигателей NEMA 42 падает быстрее, чем у меньших двигателей. NEMA 42 следует использовать, если требуется получить высокий момент на низких скоростях и нет смысла использовать мотор-редуктор.
О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
Если вы опустили все, написанное выше, или прочитали, но мало что поняли, данная глава поможет разобраться, как перейти к практической части. Несколько слов о размере двигателя. Развитие производства шаговых двигателей достигло больших успехов, и теперь шаговые двигатели одного размера разных производителей обладают очень схожими характеристиками. Именно размер двигателя задает рамки, в которых может изменяться его главная характеристика — кривая скорости-момента. Индуктивность обмотки показывает, насколько крута будет кривая СМХ при одинаковом напряжении питания драйвера с ШИМ: если мы возьмем 2 двигателя индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и тем же питающим напряжением, полученные кривые СМХ будут отличаться крутизной.
Большая индуктивность потенциально дает вам возможность получить больший крутящий момент, но чтобы произвести такую конверсию, потребуется драйвер с большим напряжением питания — тогда кривая СМХ поднимется вверх пропорционально увеличению напряжения. На практике почти все фирмы производят моторы одного размера в двух исполнениях — «медленный» и «быстрый», с большой и малой индуктивностью. Причем «быстрые» модели пользуются большей популярностью — для них на высоких оборотах требуется меньшее напряжение, а значит более дешевые драйверы и источник питания. А если вдруг не хватает мощности — можно взять двигатель побольше. «Медленные» модели остаются для специфических применений — в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п. Ток обмотки косвенно связан с крутящим моментом, но в основном он говорит о том, какой драйвер нужно будет подобрать к этому двигателю — он должен быть способен выдавать именно такой уровень тока. Напряжения питания обмотки показывает, какое постоянное(не ШИМ) напряжение можно подавать на обмотку — таково значение напряжения, используемое драйверами постоянного напряжения. Оно пригодится при вычислении максимально допустимого напряжения питания драйвера с ШИМ, и тоже косвенно связано с максимальным крутящим моментом.
АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Так как же выбрать двигатель? Зависит от того, какими вы данными обладаете. По большому счету, выбор двигателя сводится к выбору 4 вещей — производителя, вида двигателя, размера и индуктивности. Первый параметр поддается оценке с трудом — мало у кого репрезентативная выборка образцов от разных поставщиков. Что касается вида двигателя, мы рекомендуем всегда, когда есть неопределенность в выборе, использовать биполярные шаговые двигатели с 4 выводами и малой индуктивностью. Т.е. выбор в основном заключается в выборе размера двигателя(в пределах одного размера характеристики двигателей с одной индуктивностью почти всех производителей практически совпадают). Для выбора конкретной модели можно использовать следующий алгоритм:
- Рассчитайте максимальную скорость вращения V в об/сек, которую хотите получить от привода, и момент M, который необходимо получить от него на этой скорости(закладывайте в это значение запас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для стандартного двигателя с шагом 1.8 град PPS = 200 * V.
- Выберите примерно подходящий на первый взгляд размер двигателя, из числа доступных моделей этого размера выберите двигатель с не самой большой индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, указанный на кривой.
- Если момент, указанный на кривой слишком мал, рассмотрите двигатель размером побольше, если слишком велик — размером поменьше.
Однако, часто этот способ дает неверные результаты по причине большого количества факторов и допущений при расчете момента. Запросто можно получить, что для управления небольшим портальным фрезером с порталом весом 15 кг вдруг потребуются двигатели ST86-114. Чаще используют эмпирические способы, и они оказываются точнее. Один из таких способов — определение двигателей по весу портала и размеру рабочего поля. Например, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно осуществить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков классической компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть ходит по ним без какого-либо сопротивления, можно порекомендовать следующие значения:
Совместно с этими оценками можно использовать оценки для размеров рабочего поля: Рабочее поле 0,1-0,5 кв.м. — двигатели PL57-76 или аналогичные. Рабочее поле 0,5-1 кв.м. — двигатели PL86-80 или аналогичные. Рабочее поле 1-1,5 кв.м. — двигатели PL86-114 или аналогичные. Если характеристики Вашего станка находятся в пограничных интервалах, скажем, вес портала 23 кг, поле около 0,5 кв. м., стоит использовать дополнительные оценочные методы. Еще один распространенный подход заключается в анализе готовых станков на рынке, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом, и можно взять их характеристики за основу.
И последнее, что можно порекомендовать — обратиться за консультацией к опытным специалистам.
FAQ • Шаговые двигатели или серводвигатели?
Отличия
Основное отличие шаговых двигателей от серводвигателей — то, что шаговые двигатели работают без обратной связи, т.е. нет контроля — сделал ШД шаг или нет. Драйвер серводвигателя считывает показания датчика положения вала и корректирует его положение. На самом деле, отсутствие обратной связи в случае с ШД не является минусом, т.к. при правильно спроектированной и настроенной системе шаговые двигатели не пропускают шагов, т.е. пользователь не нуждается в таком контроле.
Достоинства и недостатки
Достоинства ШД:
- Точность и стабильность шага, ШД может работать с инерционными нагрузками.
- Не нужна обратная связь. ШД сам по себе это датчик положения.
- ШД — самый доступный, бюджетный, стандартный электродвигатель. Прост в подключении и настройке.
- ШД имеет долгий срок службы.
- ШД безопасен, имеет конечный момент — он останавливается в случае заклинивания передачи.
- ШД имеет хороший момент на низких оборотах, это позволяет обойтись без редуктора.
Достоинства серводвигателей (щеточных):
- Высокая отдаваемая мощность, сравнительно с электродвигателями других типов такого же размера и веса.
- Точность позиционирования определяется установленным энкодером.
- Высокий КПД, до 90% с легкими нагрузками.
- Может быстро ускоряться.
- Может кратковременно отдать повышенную мощность (2-3 раза) и повышенный момент (5-10 раза)
- Двигатель не нагревается, потребляется ток пропорционально нагрузке.
- На высоких скоростях не шумит.
- Не резонирует и не вибрирует во всем диапазоне частот вращения.
Недостатки шаговых двигателей:
- Низкий КПД. ШД потребляет достаточно энергии не зависимо от нагрузки.
- Низкая отдаваемая мощность, сравнительно с электродвигателями других типов такого же размера и веса.
- Крутящий момент сильно зависит от оборотов вращения, сильно падает с увеличением частоты вращения.
- Склонность к резонированию. Требует микрошагового управления для плавного вращения и техник подавления резонансов.
- Отсутствие обратной связи для контроля за пропуском шагов.
- Не может быстро ускоряться.
- ШД сильно нагревается при оптимальном использовании.
- При кратковременной перегрузке, ШД остановится и не сможет восстановить положение вала.
- ШД достаточно шумный (звуковой шум)
Недостатки серводвигателей (щеточных):
- Более высокая стоимость, сравнительно с ШД.
- Система с серводвигателем требует настройки.
- Сложная система. Много соединительных проводов. Наличие энкодера.
- Небезопасная система, если нарушается обратная связь — серводвигатель может провернуть передачу. Требуются системы экстренного отключения.
- Щетки изнашиваются. После 2000 часов работы, требуется их замена.
- Серводвигатель может перегореть при постоянной перегрузке.
- Требуется мощный источник питания, чтобы система была устойчива к кратковременным перегрузкам.
- Серводвигатель отдает максимальный момент на высоких оборотах, поэтому может потребоваться редуктор.
- Серводвигатели плохо охлаждаются. Серводвигатели с вентиляционными отверстиями быстро засоряются продуктами обработки материалов.
Выбор — ШД или серводвигатели
При разработке станка и выборе электродвигателей в первую очередь необходимо рассчитать, какая мощность N(Вт) требуется для управления вашим механизмом. Мы не рекомендуем сначала приобретать электродвигатель а потом пытаться его «приладить» к своей конструкции. Мы рекомендуем использовать шаговые электродвигатели, если расчетная мощность <100Вт и серводвигатели если расчетная мощность >200Вт. Если расчетная мощность находится в диапазоне 100…200Вт — подойдет и шаговый и серводвигатель, выбор ложится на пользователя. При выборе шагового двигателя стоит учитывать тот факт, что у него момент падает с увеличением частоты вращения, согласно приведенным в ТХ графикам.
Метод расчета мощности: Допустим у вас есть ЧПУ плазморез с ременной передачей или подобный ЧПУ станок с малой рабочей нагрузкой (нет усилия для фрезеровки, нужно только перемещать головку плазмореза или лазера). Вам необходимо рассчитать мощность для перемещения оси Y. Допустим Ваша расчетная скорость подачи f=10000 мм/мин, масса перемещаемой конструкции с запасом m=20кг. По инженерной формуле, потребуется мощность N=(f*m)/6120=33Вт. В данном случае можно использовать шаговый двигатель.
Проведем расчет для фрезерного станка ЧПУ. Пусть у вас установлен винт ШВП 1605 — с шагом n=5мм на оборот. Пусть вам необходима скорость подачи f=3000 мм/мин. Рассчитаем необходимые обороты электродвигателя с прямым приводом на винт ШВП RPM=f/n=600 об/мин. Необходимо определить вращающий момент, который нужно приложить к винту ШВП чтобы обеспечить необходимое усилие на фрезе, пусть это будет момент M. Размерность момента Н*м=(кг*см)/10 — масса в кг, которую нужно приложить к рычагу длиной 1см. Пусть в данном случае нам необходим момент 35кг*см=3,5Н*м. Мощность рассчитывается по формуле N=M*RPM*pi/30=220Вт. В данном случае нужно использовать серводвигатель.
Шаговый двигатель или сервопривод: как выбрать
Приводный двигатель является одним из важнейших элементов ЧПУ, поэтому к его выбору следует подходить со всей серьёзностью. Причём сложность, как правило, состоит не в выборе конкретной модели, а в подборе типа двигателя: недорогого и простого шагового, или же более совершенного, но и более дорогого, сервопривода.
Следует сразу оговориться, что под понятием «сервопривод» в данном контексте подразумевается бесколлекторный двигатель с обратной связью и возможностью управления, тогда как в общем и целом сервоприводом можно назвать любой тип двигателя, оснащённый управляющим устройством и имеющий функцию обратной связи. Чтобы определиться, шаговый двигатель или сервопривод наилучшим образом подойдёт для использования в каждой конкретной ситуации, важно знать все плюсы и минусы каждого из этих типов движущих элементов.
Плюсы и минусы шаговых двигателей
Первым и, пожалуй, одним из важнейших преимуществ шаговых двигателей является их доступная стоимость. Даже крупногабаритные модели ШД, в сравнении с бесколлекторными сервоприводами, стоят на порядок дешевле. Именно этот фактор зачастую становится решающим при выборе типа двигателя для ЧПУ. Кроме того, шаговые двигатели, отличающиеся простотой конструкции, не требуют дорогостоящего обслуживания и просты как в использовании, так и в настройке: первичные настройки задаются с помощью обычного контроллера, после запуска оборудования шаговый двигатель работает в стабильном режиме. Дополнительным преимуществом шаговых двигателей является более стабильная, чем у сервоприводов, работа в режиме удержания, обеспечивающаяся дискретностью ШД.
Однако у шаговых двигателей есть и ряд недостатков. Так, для крупных станков (с массой портала свыше 100кг, или же рабочим полем более 1м по каждой из осей) использовать шаговые двигатели не рекомендуется, так как они могут довольно сильно резонировать, что чревато пропуском шагов и падением точности. Кроме того, шаговые двигатели, из-за высокой инерции, не приспособлены к быстрым стартам и резким остановкам – работа ШД в таком режиме также может стать причиной пропуска шагов. Кроме того, в сравнение с сервоприводом шаговый двигатель отличается довольно высоким уровнем шума, что особенно ощутимо при работе на высоких скоростях.
Плюсы и минусы бесколлекторных сервоприводов
Основным преимуществом сервопривода является высокий конечный КПД, достигающийся благодаря возможности быстрого старта без потери точности. При этом сервоприводы практически не подвержены резонансу, что, несомненно, также является важным плюсом. Бесколлекторные серводвигатели, при грамотном управлении, легко справляются с кратковременными перегрузками и отличаются длительным роком службы. Кроме того, они практически бесшумны при работе в любых режимах.
Среди минусов серводвигателей, пожалуй, самым значимым, является очень высокая стоимость, объясняющаяся конструктивной сложностью механизмов такого типа. Также следует отметить, что тонкие настройки сервопривода довольно сложны – в большинстве случаев для того, чтобы настроить оптимальный режим работы бесколлекторного серводвигателя требуется специальное оборудование (внешние устройства с соответствующим интерфейсом) и знание программирования.
Купить шаговый двигатель или сервопривод в Stepmotor
Независимо от того, какому типу приводного двигателя – шаговому иди бесколлекторному – вы отдадите предпочтение, купить данные механизмы можно на нашем сайте. В каталоге Stepmotor представлен широкий выбор шаговых двигателей, бесколлекторных сервоприводов, энкодеров и прочих комплектующих для ЧПУ. Если у вас возникла необходимость купить шаговый двигатель или бесколлекторный сервопривод в наличии по доступной цене, внимательно ознакомьтесь с характеристиками интересующего вас устройства.
Дополнительные функции драйверов шаговых двигателей
- Статьи
- Комплектующие станков с ЧПУ — электроника, мехатроника, двигатели
В огромном выборе драйверов шаговых двигателей, что есть сейчас на рынке, несложно запутаться. Тем более, когда продавцы стараются написать побольше текста и страшных слов в описание продукта. Тем начинающим конструкторам, кого длинные списки с перечислением «расширенных функций» и всяких опций сбивают с толку при принятии решения, призвана помочь данная статья. Здесь описаны наиболее часто встречающиеся опции, а также дана субъективная оценка реальной нужности такой функции(или отсутствия таковой).
Начнем с самых распространенных:
ОПТОИЗОЛИРОВАННЫЕ ВХОДЫ
Сейчас сложно встретить драйвер, в котором входы не изолированны гальванически от остальной части, и производители упоминают об оптоизоляции больше для проформы. Драйвер — устройство силовое, на входе у него маломощные сигналы, как правило 0..5 В, и током не более 50-100 мА, тогда как в драйвере коммутируются напряжения на порядок больше, иногда до 100-200 В, и токи бывают немалые — до 5-8А. В случае отсутствия оптопар на входе, при пробое силовой части эта энергия может устремиться в виде тока обратно по входным проводам, и повредить контроллер и подключенные к нему устройства. Поэтому защитная опторазвязка — строго обязательная часть любого нормального драйвера. Все драйверы Purelogic имеют оптоизолированные входы управления (опторазвязку).
МИКРОШАГ И МАКСИМАЛЬНАЯ ЧАСТОТА ВХОДНЫХ ИМПУЛЬСОВ
Микрошаговый режим сам по себе, несомненно, полезная функция. Вопрос в том, можно ли использовать максимальное деление шага как аргумент при выборе драйвера. Иногда кажется, что производители соревнуются, кто больше делений шага сможет зашить в устройство. Многие фирмы предлагают драйверы, позволяющие делить шаг на 512 микрошагов. Для того, чтобы в таком режиме вращать вал со скоростью 20 об/сек(а это вполне нормальная скорость для качественных двигателя и драйвера), потребуется подавать импульсы STEP с частотой 512*200*20 = 2 Мгц. Тогда как сам драйвер обычно способен отрабатывать импульсы на частоте не более 200-300 кГц. Соответственно, если Вы используете деление шага 1/512 то быстрее чем 2 об/сек двигатель раскрутить не удастся — это в том случае, если Ваш контроллер может выдавать импульсы с частотой 300 кГц. Многие контроллеры ограничены частотой 100-150 кГц, и менее. Следовательно, в реальных задачах имеет смысл использовать микрошаг порядка 1/32 или 1/64, бОльшие деления — удел очень узкоспециальных применений. Мы рекомендуем не смотреть на максимальное деление шага при выборе драйвера, но желательно, чтобы драйвер позволял работать в диапазонах деления шага 1/2 — 1/64. Компания Purelogic выпускает одноканальные и многоканальные драйверы ШД с диапазоном деления шага от 2 до 64.
ФУНКЦИЯ ПОДАВЛЕНИЯ РЕЗОНАНСА
Она же функция компенсации резонанса, она же функция устранения среднечастотной нестабильности. Шаговые двигатели подвержены резонансу — такова их конструктивная особенность. Чем сильнее резонирует вал двигателя, тем меньший крутящий момент двигатель отдает. В 80% случаях прохождения частоты резонанса — вал останавливается. Функция подавления резонанса — помогает уменьшить негативный эффект резонанса. Этой функцией оснащены на самом деле очень мало драйверов шаговых двигателей, самые известные примеры — это драйверы Purelogic, Geckodrive и Leadshine серий DM, EM. Технологии, которые используют производители, не раскрываются, но примерно известно, что возникновение резонанса отслеживается по колебаниям ЭДС индукции, возникающим в обмотках двигателя от резонирующего ротора, после чего ПО драйвера определяет стратегию его устранения. Функция подавления резонанса достаточно полезна, и польза её растет вместе с нагрузкой на двигатель и его размером — если для двигателей 42 и 57 мм это не так существенно, то работать с 86 двигателями без такой функции уже может быть неприемлемо. Следует упомянуть, что алгоритмы подавления резонанса в блоках управления Purelogic и Geckodrive — автоматические, не требуют настройки и подобраны под конкретные типоразмеры двигателей во всем диапазоне частот. Именно поэтому Purelogic выпускают драйверы под конкретные типоразмеры ШД — PLD330 для PL42 (NEMA17), PLD440/PLD545/PLD57 для PL57 (NEMA23), PLD880/PLD86 для PL86 (NEMA34) и PLD8220 для PL110 (NEMA43). В драйверах Leadshine понадобится ручная настройка драйвера — подбор частот устранения резонанса (на выбор 3 диапазона частот) что делает эти драйверы более сложными и менее гибкими в настройке.
МОРФИНГ
Функция, впервые появившаяся в драйверах Geckodrive. В полном шаге каждая обмотка постоянно запитана полным током, а при использовании микрошагового режима — меняются по синусоидальным законам, со смещением фазы в 90 градусов. Это значит, что в режиме полного шага на ротор действует сила, складывающаяся из сил магнитного притяжения обеих обмоток статора, причем — обе этих силы максимальны(запитка полным током). В случае микрошага — две обмотки могут быть запитаны полным током только в тот момент, когда ротор проходит положение полного шага. Следовательно, момент в микрошаговом режиме — меньше чем в полу- или полношаговом. При быстром вращении, однако, можно объединять много микрошагов в один шаг — в самом деле, ротор имеет инерцию, и ни мгновенно разогнаться, ни мгновенно остановиться не может, а значит, скорость меняется плавно, и можно объединять микрошаги в полный шаг без существенной потери точности — а значит, запитывать обмотки полным током, и получать больший момент на высоких оборотах. Функция плавного перехода с микрошагового управления(синусоидальных токов) к полношаговому(запитке фаз полным током) и называется морфингом. Таково теоретическое обоснование данной функции. Драйверы Purelogic поддерживают технологию морфинга.
ПЛАВНЫЙ ПУСК ШАГОВЫХ ДВИГАТЕЛЕЙ
При подаче питания на блоки управления, ток в обмотки подается обычно просто — полным напряжением и затем отсечка по достижению нужного значения тока. Поскольку до подачи тока ротор находится неизвестно где, то в момент подачи он приходит в положение равновесия рывком — это слышно при включении питания, раздается характерный «удар». При плавном пуске напряжение питания возрастает постепенно, и вал двигателя подтягивается тоже постепенно, без удара. В целом, это благотворно сказывается на механике. Все драйверы Purelogic имеют функцию плавного запуска ШД.
СНИЖЕНИЕ ТОКА ФАЗ ПРИ ПРОСТОЕ
При простое (отсутствии управляющих сигналов) драйвер может снижать ток в обмотках до установленного значения. Это позволяет уменьшить нагрев шагового двигателя и экономить энергию. Все драйверы Purelogic имеют функцию AUTO-SLEEP — снижение тока в обмотках ШД при простое.