


устройство, принцип работы, область применения
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
Как устроен шаговый двигатель
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.

Принцип действия
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
 до угла в 90°")
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.

Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.

Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.

Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.

Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.

То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100. А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.

Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
Недостатки:
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Материалы по теме:
Шаговый двигатель — принцип работы, применение, виды, характеристики, особенности, конструкции
Главная / Реестр / Что такое шаговый двигатель, конструкция, где применяется?Шаговый двигатель представляет собой устройство, преобразующее электрическую энергию в механическую. По конструкции это бесколлекторный синхронный мотор с ротором, совершающим дискретные перемещения с фиксацией положения после каждого смещения. Величина шага строго определена, что позволяет вычислять абсолютную позицию ротора, подсчитав количество шагов.
Принципы действия биполярных и униполярных шаговых двигателей
Биполярный
Основные элементы шагового двигателя – ротор и статор. Первый представляет собой постоянный двухполюсный магнит. Он располагается на валу устройства. Статор – это замкнутый магнитопровод в виде кольца, он состоит из двух обмоток, половинки которых находятся на противоположных полюсах. На обмотке АВ – вертикально размещенные, на СD – горизонтально расположенные.
- При подаче напряжения на АВ появляется магнитное поле статора. Сверху полюс N, внизу S. Так как разноименные полюса притягиваются, ротор двигателя займет положение, при котором ось его магнитного поля совпадет с осью работающих АВ. Такое расположение ротора двигателя является очень устойчивым, если попытаться его сдвинуть, возникнет сила, которая будет его возвращать назад.
- Напряжение с обмотки АВ снимается и подается на обмотку CD, в результате чего возникает магнитное поле, в котором полюса расположены горизонтально – справа N, а слева S. Соответственно, постоянный магнит ротора расположится по горизонтальной оси, проделав минимальный путь – повернувшись на четверть оборота. Это будет шагом двигателя.
- Каждая последующая коммутация (со сменой полярности при подключении обмотки) заставит ротор поворачиваться на одну четвертую окружности. На полный оборот потребуется четыре шага. Частота вращения пропорциональна частоте переключения фазных обмоток. Если подключать фазы, меняя полярность в противоположной последовательности, ротор шагового двигателя будет вращаться в обратную сторону.
Униполярный
Выше был описан принцип работы биполярного шагового двигателя – у него для каждой фазы предусмотрено две обмотки. Чтобы менять магнитное поле, необходимо каждую обмотку:
- отключить от источника электротока,
- подключить в прямой полярности,
- подключить в обратной полярности.
Осуществить коммутацию позволяет мостовой драйвер, который представляет собой сложную микросхему. Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
При выборе шагового двигателя следует учитывать, что биполярный, при тех же габаритах, что и униполярный, обеспечивает больший крутящий момент. Выигрыш достигает 40 %. Это связано с тем, что в шаговом униполярном двигателе задействуется одна обмотка, а в биполярном две. Преимуществом устройства с одной обмоткой является простое управление.
Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе. Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот. Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
В конструкции шаговых гибридных двигателей присутствует и зубчатый ротор, и постоянные магниты. Функционирует устройство по тому же принципу, что и двигатель с постоянными магнитами, но гибридный вариант отличается большим числом полюсов. За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз. При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя. Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим. Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Основные достоинства
К достоинствам шаговых двигателей относят:
- точное позиционирование, которое не требует обратной связи. Угол поворота определяется числом электрических импульсов;
- полный крутящий момент, который двигатель обеспечивает при снижении скорости вращении и до полной остановки;
- фиксацию положения шагового двигателя при помощи тока удержания;
- высокую точность регулировки скорости вращения без необходимости использования обратной связи;
- быстрый старт и остановку двигателя, реверс;
- высокую надежность. Устройства долговечны благодаря отсутствию коллекторных щеток.
Основные недостатки
К недостаткам шаговых двигателей можно отнести:
- относительно невысокие скорости вращения;
- сложную систему управления;
- риск эффекта резонанса;
- риск потери позиционирования ротора шагового двигателя под воздействием механических перегрузок;
- низкую удельную мощность.
Характеристики
Двигатель шагового типа является сложным механическим и электротехническим устройством. Список основных характеристик, которые следует учитывать при выборе устройства, включает:
- сопротивление обмотки фазы. Показатель сопротивления обмотки при работе на постоянном токе;
- число полных шагов за один оборот ротора. Это основной параметр шагового двигателя, который определяет точность позиционирования, плавность движения, разрешающую способность;
- угол полного шага. Это величина угла, на который поворачивается ротор за одно перемещение. Для расчета можно разделить 360° на количество шагов;
- номинальный ток. Наибольшее значение тока, при котором двигатель может работать неограниченно долгое время;
- номинальное напряжение. Максимально допустимое постоянное напряжение на обмотке при статическом режиме шагового двигателя;
- сопротивление изоляции. Величина сопротивления между корпусом и обмотками;
- момент инерции ротора. Чем меньше инерционность ротора, тем он быстрее разгоняется;
- крутящий момент. Для шагового двигателя это ключевой механический параметр. Указывается максимальное значение для конкретной модели двигателя;
- пробивное напряжение. Показатель минимального напряжения, при котором возникает пробой изоляции между корпусом и обмотками;
- индуктивность фазы. Данный параметр принимают во внимание, если от двигателя требуется высокая скорость вращения. От него зависит скорость увеличения тока в обмотке. Если фазы следует переключать с высокой частотой, необходимо увеличивать напряжение для быстрого нарастания тока;
- удерживающий момент. Это показатель крутящего момента при остановленном шаговом двигателе и при двух фазах, запитанных номинальным током.
Сфера применения
Шаговые двигатели рассчитаны на использование в составе устройств с дискретным управлением, где необходимо точно позиционировать исполнительные механизмы. Также они применяются в промышленном оборудовании с программным управлением, где требуется обеспечить непрерывное движение по заданной траектории и импульсное влияние исполнительными механизмами. Ротор шагового двигателя способен поворачиваться на заданный угол и на определенное количество оборотов вокруг своей оси. Благодаря этому шаговые устройства позволяют позиционировать считывающие головки проигрывателей оптических дисков, дисковых накопителей, печатающих головок сканеров, принтеров и иных устройств. Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
Твитнуть
Поделиться
Поделиться
Плюсануть
Класснуть
Шаговый двигатель, виды, принцип работы, плюсы и минусы
Шаговый двигатель, виды, принцип работы, плюсы и минусы- Станки ЧПУ
- Лазерные станки с ЧПУ
- Токарные станки
- Круглофрезерный станок
- Лазерно-гравировальные станки
- Станок плазменной резки
- Многошпиндельные станки
- Станок для обработки пенопласта
- 3D Принтеры
- Покрасочный станок
- Комплектующие к ЧПУ
- Комплектующие для лазерных станков
- Готовые модули
- Режущий инструмент
- Фрезы ARDEN для ручных и ЧПУ фрезеров
- Фрезы пазовые прямые
- Фрезы для выравнивания поверхности
- Фрезы V-образные
- Фрезы кромочные прямые
- Фрезы для врезания петель и замков
- Фрезы пазовые галтельные
- Фрезы радиусные полукруглые
- Фрезы «Ласточкин хвост»
- Фрезы пазовые
- Фрезы четвертные
- Фрезы профильные
- Фреза «Гусёк» (псевдофилёнка), 222 серия
- Фрезы «Гусёк» 210 серия
- Фрезы «Тройной внешний радиус», 323 серия
- Фрезы «Декоративный гусёк» 212 серия
- Фрезы «Классический узор», 211 серия
- Фрезы «Тройной внутренний радиус», 324 серия
- Фрезы «Шар» 208 серия
- Фрезы Бычий нос «Катушка», 330 серия
- Фрезы внешнее и внутреннее скругление 2 в 1
- Фрезы для скругления удлиненные
- Фрезы мультипрофильные (Карниз), 351 серия
- Фрезы овальное скругление (Жалюзи)
- Фрезы превсофиленка «Волна-1»
- Фрезы профильные «Ручка» 502 серии
- Фрезы профильные «Углубленный шар», 329 серия
- Фрезы профильные «Французская классика», 352 серия
- Фрезы профильные для плинтусов, 403 серия
- Фрезы фигурные «Классический гусёк», 311 серия
- Фрезы филёночные, 416 серия
- Фрезы для сращивания и мебельной обвязки
- Комплектующие к фрезам ARDEN
- Набор радиальных и фасочных фрез
- Комплектующие для плазменной резки
- Пневматическое оборудование
- Дисковые пилы
- Оборудование для покраски
принцип действия, виды, режимы работы
Шаговый двигатель – электрический синхронный мотор, совершающий оборот некоторым количеством равноценных эквивалентных перемещений. От длины элементарного сегмента зависит точность, с которой ротор позиционируется нужным образом. В отдельности минимальное перемещение называется шагом.
Принцип действия шаговых двигателей, разновидности
Шаговый двигатель в комплекте с драйвером выполняет преобразование числа входящих импульсов в заданное угловое перемещение вала. Устройство сопрягается с цифровой техникой, управляющий сигнал часто аналоговый. Входы обмоток посещает синусоида нужной фазы. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники.

Конструкция шагового двигателя
Особенностью шагового двигателя назовем форму стального ротора. Снабжен полюсами, подчеркнутыми путем вынесения на кончик острого либо тупого зубца. Мертвый металл, притягиваемый катушками статора. Характеризуется некоторой намагниченностью остаточного рода, вызванной действием поля. Точное позиционирование полюсов статора обеспечивает шаговому двигателю уникальное свойство: точное позиционирование по углу поворота вала. Из правила встречаются исключения, рассмотренные ниже по тексту.
Шаговые двигатели используются промышленностью, цифровой техникой – где требуется обеспечить точное позиционирование вала. Некоторые источники датируют изобретение серединой XIX века, первые сведения просочились в специализированные журналы в 20-х годах XX века. Речь о трехфазном реактивном шаговом двигателе. Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США.
Первый открытый патент получен на прибор с ротором, статором на 32 зуба шотландским инженером Уолкером в 1919 году. Прибор рассчитан работать с трехфазным напряжением. Сегодня шаговые двигатели встречаются в жестких дисках персональных компьютеров, автоматизированных линиях сборки. Ключевыми достоинствами считают низкую стоимость, простоту позиционирования. Альтернатив не придумано. Устройства применяются приблизительно с 70-х годов XX века, формируют четыре основные группы:
- Шаговые двигатели на постоянных магнитах.
- Гибридные синхронные двигатели.
- Вентильные реактивные двигатели.
- Шаговые двигатели Лавета.
Полюсы различной намотки, к примеру, унифилярной, бифилярной (см. Катушка индуктивности). В первом случае ротор совершает обороты однонаправленно, если не предусмотреть дополнительную коммутацию фаз. Бифилярный двигатель отрабатывает реверс простой подачей напряжения на другие пары контактов. На каждом полюсе нить проволоки намотана, образуя две катушки. Конструкция такова, что знаки полей противоположные. Обеспечивает простую организацию реверса. Схожие схемы видим на примере двигателя привода барабана стиральной машины.
Мировой практикой принята стандартизированная маркировка указанных разновидностей устройств:
- Красный, желтый – первая обмотка.
- Черный, оранжевый – вторая обмотка.
- Обмотка с центральным общим выводом. Красный, черный, красный с белым – первая обмотка. Зеленый, белый, зеленый с белым – вторая обмотка.
- Двойная обмотка полюса. Красный, красный с белым – первая пара первой обмотки. Желтый, желтый с белым – вторая пара первой обмотки. Черный, черный с белым —первая пара второй обмотки. Оранжевый, оранжевый с белым – вторая пара второй обмотки.
Каждая обмотка способна образовывать несколько полюсов. Для включения реверса бифилярных шаговых двигателей коммутируется другая пара контактов. И если для формирования обратного вращения унифилярных разновидностей нужен формирующий контроллер, здесь допустимо использовать рядовой контактор.
Режимы работы шаговых двигателей
Изделия функционируют в нескольких режимах:
- Полный шаг реализуется поочередной подачей управляющих напряжений по фазам. Стандартное число – 200 перемещений на 1 оборот.
- В режиме половинного шага после активации одной фазы, остается состояние неизменным часть времени включения следующей. Получается, на зуб действуют одновременно два полюса. Вал замирает, фиксируя промежуточное положение. Потом первая фаза пропадает, ротор делает полшага вперед. Несмотря на меньший развиваемый крутящий момент, режим находит большее применение промышленностью, благодаря сокращению уровня вибраций.

Электрический синхронный мотор
- Микрошаговые режимы считаются искусными ноу-хау наработками конкретных производителей. Режимом заправляет специальный чип, генерирующий управляющие напряжения, чтобы точность позиционирования вала находилась в районе сотой шага (20000 перемещений на 1 оборот). Подобные изыски нужны микроэлектронике, не исключено возникновение потребности тонких технических решениях среди промышленных конвейеров. Драйвер генерирует 50 с лишним тысяч циклов управляющих напряжений на оборот.

Шаговые двигатели на постоянном магните
Род двигателей возможно встретить в помпе стиральной машины. К примеру, блок, удаляющий воду бака после стирки, между отдельными этапами цикла. Скорость вращения вала невелика, ротор в составе содержит постоянный магнит, шаг большой. Допустим, 45 градусов. На обмотки статора поочередно подается напряжение, создавая вращающееся магнитное поле. Постоянный магнит вала следует изменениям вектора напряженности.
Достоинствами шаговых двигателей назовем простоту, низкую стоимость. Постоянные магниты часто применяются принтерами. Отличие от других шаговых двигателей: ротор лишен зубцов, полюсов мало. Бывает два, катушек статора – 4, каждым перемещением вал совершает поворот 90 градусов. Требуется 4 фазы, сдвинутые друг относительно друга на 90 градусов. Драйвер просто реализовать при помощи конденсаторов.
Благодаря низкой скорости оборотов двигатель развивает высокий крутящий момент (загружая бумагу из лотка принтера).

Двигатель с постоянным магнитом
Гибридные синхронные двигатели
Гибридные синхронные двигатели используются промышленностью по причине развития высокого крутящего момента, хорошо держат статическую нагрузку. Вал по-прежнему представлен постоянным магнитом, снабжается зубцами, на статоре множество полюсов. Тип двигателей обеспечивает высокие скорости вращения. Каждый шаг в стандартном исполнении равен 1,8 угловых градусов (200 шагов/оборот). Выпускают специализированные исполнения:
- 0,9 градуса (400 шагов/оборот).
- 3,6 градуса (100 шагов/оборот).
Вентильные шаговые двигатели
Главным отличием вентильных двигателей считают отсутствие тяжелых постоянных магнитов. Благодаря чему жесткой фиксации положения не происходит при наличии высокой точности. Двигатели идеальны для просмотра слайдов кинопленки. Относительно плавное, точное движение идеально подходит случаю.
Ротор облегченный, стальной, имеет ярко выраженные, сравнительно немногочисленные зубцы. Шаг средний, например, для трех фаз, 12 полюсов выйдет 15 градусов. Расстояние меж полюсами составляет 30 градусов. Промежуточные положения вал занимает в случаях, когда активируются одновременно две соседние фазы. Чередование соответствует обычной промышленной сети (к примеру, 400 вольт).
Главной особенностью вентильных двигателей является сравнительно малое количество тупых зубцов. Высокой точности позиционирования ожидать не приходится. Для реализации продвинутых алгоритмов применяются сложные драйверы.
Шаговые двигатели Лавета
Шаговые двигатели Лавета временами применяются электрическими часами. Сконструированы работать с сигналом одной фазы. Благодаря возможности миниатюризации двигатели Лавета послужат исполнительной частью наручных часов. Название устройства получили именем изобретателя – инженера Мариуса Лавета.

Инженер Мариус Лавет позавидует
В 1936 году выпускник Высшей школы электрики сконструировал двигатель, принесший всемирную известность. Статор выглядит, как у электрического мотора с расщепленными полюсами. Одна катушка. Полюсы образованы единичными витками сравнительно толстой медной проволоки, расположенными на магнитопроводе, создавая нужную фазу ЭДС. Индуцированные токи обеспечивают нужный крутящий момент. Задержка распространения магнитного поля по сердечнику используется сдвигать фазу на 90 градусов, имитируя двухфазное напряжение. Ротор представлен постоянным магнитом.
Конструкции охотно используются бытовой техникой (блендерами, миксерами). Отличие двигателей Лавета в том, что благодаря зубцам вал фиксируется с некоторым шагом. Становится возможным характерное движение секундной стрелки. Как большинство шаговых двигателей, разновидность не предназначена работать на реверс.
Параметры шаговых двигателей
Отдельные параметры шаговых двигателей критичны при выборе соответствующего контроллера, формирующего управляющие напряжения:
- Индуктивность. Высокое значение параметра обычно у низкоскоростных двигателей с явным крутящим моментом. При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков.
- Потребляемый ток влияет на жесткость переключения меж соседними шагами. Более плавный режим требует снижения параметра. Большой потребляемый ток повышает крутящий момент. Таким образом, правильный выбор параметров загружает плечи проектировщика.
- Предельный уровень рабочих температур шаговых двигатель невелик. Верхняя граница находится в области 90 градусов Цельсия. Перегрев возможен на высоких крутящих моментах при значительном потреблении тока. Для разгрузки иногда применяется режим удержания, когда вал стопорится некоторое время.
Разновидности драйверов шаговых двигателей
В глобальном смысле выделяют три группы драйверов управления шаговыми двигателями:
- Униполярные формируют импульсы тока одного направления. Простой, неприхотливый метод, использование снижает крутящий момент на 40%. Специалисты объясняют феномен невозможностью одновременного питания всех обмоток, способных участвовать в движении. Методика подходит низким рабочим скоростям.
- Драйверы с гасящими резисторами сегодня считаются устаревшими. Позволяют выжать из двигателя максимум скорости. Большое количество энергии выделяется теплом на гасящих резисторах.
- Биполярные драйверы популярны сегодня. Игнорируя сложность конструкции, достигается высокая эффективность. Каждый драйвер содержит формирующий блок, составленный четырьмя транзисторами. Питание подается, минуя диоды, с резистора снимается сигнал обратной связи. Напряжение достигает определенного уровня, открываются нужные ключи для снижения. Форма сигнала принимает пилообразную форму, двигатель с высоким постоянством поддерживает заданную мощность.
Применение шаговых двигателей
Применение шаговых двигателей- Станки ЧПУ
- Лазерные станки с ЧПУ
- Токарные станки
- Круглофрезерный станок
- Лазерно-гравировальные станки
- Станок плазменной резки
- Многошпиндельные станки
- Станок для обработки пенопласта
- 3D Принтеры
- Покрасочный станок
- Комплектующие к ЧПУ
- Комплектующие для лазерных станков
- Готовые модули
- Режущий инструмент
- Фрезы ARDEN для ручных и ЧПУ фрезеров
- Фрезы пазовые прямые
- Фрезы для выравнивания поверхности
- Фрезы V-образные
- Фрезы кромочные прямые
- Фрезы для врезания петель и замков
- Фрезы пазовые галтельные
- Фрезы радиусные полукруглые
- Фрезы «Ласточкин хвост»
- Фрезы пазовые
- Фрезы четвертные
- Фрезы профильные
- Фреза «Гусёк» (псевдофилёнка), 222 серия
- Фрезы «Гусёк» 210 серия
- Фрезы «Тройной внешний радиус», 323 серия
- Фрезы «Декоративный гусёк» 212 серия
- Фрезы «Классический узор», 211 серия
- Фрезы «Тройной внутренний радиус», 324 серия
- Фрезы «Шар» 208 серия
- Фрезы Бычий нос «Катушка», 330 серия
- Фрезы внешнее и внутреннее скругление 2 в 1
- Фрезы для скругления удлиненные
- Фрезы мультипрофильные (Карниз), 351 серия
- Фрезы овальное скругление (Жалюзи)
- Фрезы превсофиленка «Волна-1»
- Фрезы профильные «Ручка» 502 серии
- Фрезы профильные «Углубленный шар», 329 серия
- Фрезы профильные «Французская классика», 352 серия
- Фрезы профильные для плинтусов, 403 серия
- Фрезы фигурные «Классический гусёк», 311 серия
- Фрезы филёночные, 416 серия
- Фрезы для сращивания и мебельной обвязки
- Комплектующие к фрезам ARDEN
- Набор радиальных и фасочных фрез
- Комплектующие для плазменной резки
- Пневматическое оборудование
- Дисковые пилы
- Оборудование для покраски
Шаговые двигатели. Принцип действия. Различные способы управления
Шаговые двигатели: принцип действия и отличия от двигателей постоянного тока
Двигатели постоянного тока (ДПТ) с постоянными магнитами Lenze начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
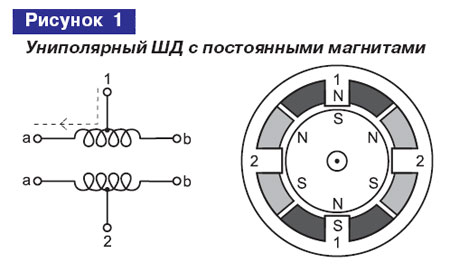
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
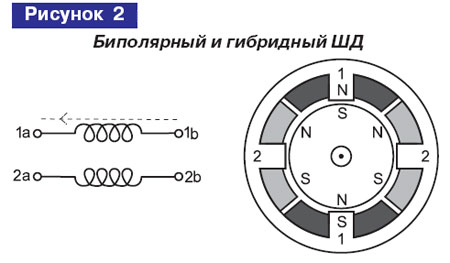
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
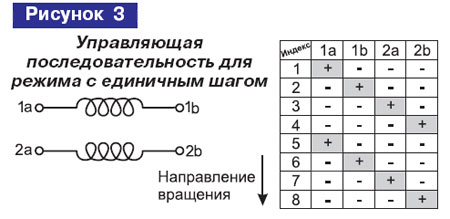
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
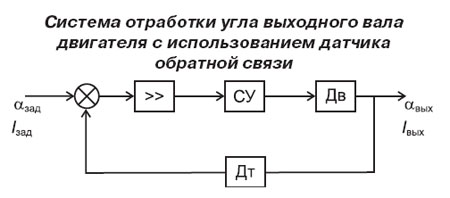
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
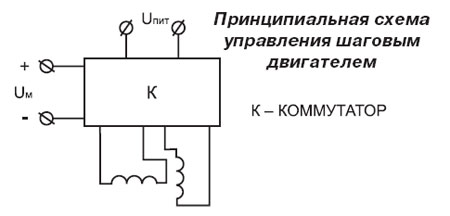
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.

Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».

Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.

При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
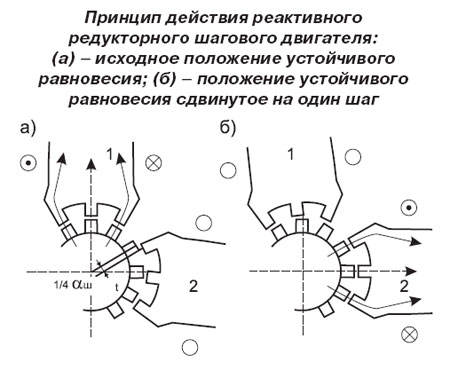
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
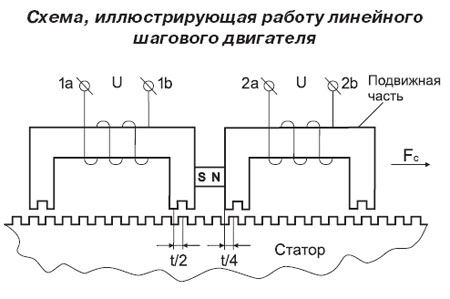
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Режимы работы синхронного шагового двигателя
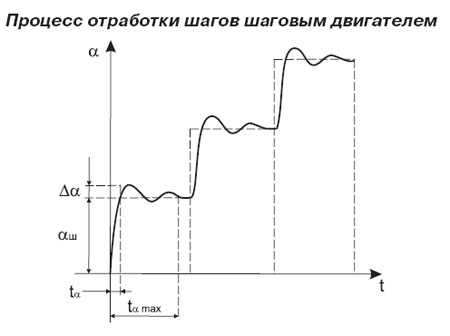
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода xследующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
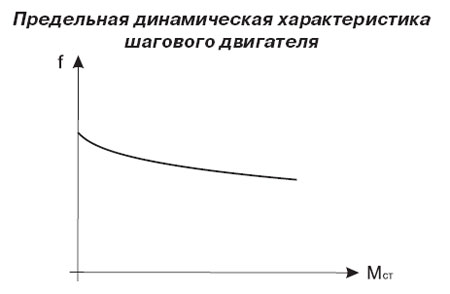
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.

Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемлемость падает с увеличением нагрузки.
Автор: В. П. Колодийчик.
Журнал «Электротехнический рынок» №12 (18) декабрь 2007
Шаговые электродвигатели. Виды и работа. Особенности
Шаговые электродвигатели легко решают проблему точного позиционирования, не затратив больших средств. Моторы чаще применяются в роботах, станках с программным управлением. Рассмотрим устройство и действие двигателей.
Устройство
Шаговые электродвигатели являются двигателями переводящими электричество в механическое движение. Главным отличием его от других электромоторов в методе действия. Благодаря этому методу вал вращается. Моторы с шагом созданы для прерывистого вращения, этим они отличаются от других. Их вращение состоит из шагов, от этого получилось название.
Шаг является частью оборота вала мотора. Размер шага зависит от механической части двигателя и от метода управления. Шаговые двигатели подключаются к различным типам питания. В отличие от своих собратьев, шаговый мотор имеет управление импульсами, преобразующимися в градусы, а затем во вращение. Например, 2,20 шаговый мотор вращает вал на 2,20 при каждом поданном импульсе. Эта характеристика дает повод называть их цифровыми.
Метод действия
Обмотки в количестве 4-х штук стоят по кругу равномерно между собой на статоре. В зависимости от того, как подключены эти обмотки будет определяться тип шагового двигателя. В нашем случае обмотки разделены, мотор с шагом, углом поворота в 90 градусов. Обмотки подключены по кругу. Порядок подключения направление вращения двигателя с шагом. На рисунке видно, что вал вращается на 90 градусов в то время, как ток поступит в катушку, через 1 секунду.Стандартными составляющими шаговых двигателей являются ротор и статор. Ротор включает в себя сердечники, изготовленные из магнитов. Схематически дано изображение.
Режимы управления
При разной подаче тока на катушки вал двигателя вращается по-разному.
Волновое управление
Метод практически нами рассмотрен, волновое действие на катушку. Ток идет через одну катушку. Такой метод редко применяется, характерен пониженным потреблением энергии, дает возможность получения меньше 50% момента вращения двигателя. Большую нагрузку при таком управлении шаговые электродвигатели не выдержат. На один оборот вала приходится четыре шага.
Управление полным шагом
Широко применяемый метод — полношаговый. По этому способу напряжение питания на катушки подается попарно. От того, как подключены обмотки, двигателю необходим двойной ток. Электродвигатель при такой схеме выдаст 100% момента вращения по номиналу.
Полный оборот двигателя соответствует четырем шагам, число шагов по номинальному значению.
Режим полушага
Это оригинальный метод получения двойной точности позиционирования, не изменяя конструкцию двигателя. Чтобы работать по этому способу, подключают одновременно все имеющиеся пары. Ротор поворачивается на 0,5 шага. Такой способ имеет место при применении двух или одной катушки.
Режим с 1 обмоткой Режим с 2 обмотками
По этому способу один и тот же мотор может выдать шагов в 2 раза больше на один оборот. Это значит, что система позиционирования работает с двойной точностью. Наш мотор выдает восемь шагов на один оборот.
Микрошаговый режим
Смысл микрошага заключается в подаче на катушки двигателя напряжения питания сигнала определенной формы, похожей на синус, а не импульсов. При таком методе изменения положения дает возможность получения плавного перемещения.
Благодаря микрошаговому режиму шаговые электродвигатели широко применяются в позиционировании, в программно управляемых станках. Рывки деталей, работающих с двигателем, толчки самого механизма понижаются. В микрошаговом режиме двигатель вращается плавно, как моторы постоянного тока.
Конфигурация графика тока, проходящего по обмотке, сходна с синусоидой. В эксплуатации применяются цифровые сигналы. Их примеры показаны на рисунках.
Способ микрошага — подключение питания двигателя, не управления катушками.
Отсюда следует, что микрошаг применяется при волновом типе.
В микрошаговом типе шаги не увеличиваются, хотя визуально это представляется. Для увеличения точности механизма применяют шестерни с трапецеидальными зубьями, чтобы обеспечить плавный ход.
Типы моторов
Шаговые электродвигатели с постоянным магнитом
Ротор оборудован постоянным дисковым магнитом с несколькими полюсами. Действует по такому же принципу, как микрошаговый мотор. Катушки статора отталкивают и притягивают магнит, расположенный на роторе, образуя момент вращения.
Размер шага с постоянным магнитом находится в интервале от 45 до 90 градусов.
Шаговые электродвигатели с сопротивлением переменной величины
Ротор не имеет постоянных магнитов. Вместо них сердечник ротора производится из металла, похожего на диск с зубьями, или на шестерню. На статоре расположены обмотки в количестве более 4-х штук. Катушки подключаются в парах друг к другу.
Крутящий момент уменьшается, так как постоянные магниты отсутствуют. Однако, имеется положительная сторона — у шаговых моторов отсутствует момент стопорения. Стопорящий момент вращения создан постоянными магнитами, притягивающимися к корпусу статора при отключенном питании в катушках.
Можно просто определить, какой момент, если попробовать повернуть отсоединенный мотор. Сразу будут понятны ощутимые щелчки в двигателе при каждом шаге. Эти ощущения и будут являться моментом фиксации. Момент притягивает к себе магниты корпуса. На рисунке изображено действие мотора.
Шаг равен интервалу от 5 до 15 градусов.
Шаговый мотор гибридного типа
Шаговые электродвигатели называются «гибридными», потому что включают в себя разные типы характеристик. Они имеют хорошие моменты, малый размер шага, находящийся в интервале от 0,9 до 5 градусов. При этом он обеспечивает высокую точность.
Механическая конструкция вращается со значительными скоростями. Такие виды моторов применяются в станках с программным управлением, в роботах. Недостатком является высокая цена. Обыкновенный двигатель вместе с восьмью катушками.
Из-за невозможности изготовления магнита, нашли оригинальное решение. Взяли два диска с зубьями 50 штук, постоянный магнит. Приварили диски к полюсам. Получилось, что два диска имеют соответственно каждый полюс.
Оригинальность конструкции в том, что диски размещены так, что, смотря на них сверху, они похожи на один диск со 100 зубьями. Вершина зуба на одном диске совпадает со впадиной. На рисунке изображено действие гибридного мотора 75 шагов на один оборот. Шесть обмоток сделаны парами, которые имеют катушку на противоположных краях. Первая пара – это пара вверху и внизу обмотки, тогда 2-я пара смещена на угол 60+5 градусов от первой, а 3-я смещена на 65 градусов от второй.
Разница углов позволяет вращаться валу двигателя. Управляющие режимы применяются, как волновые для экономии электроэнергии.
Когда катушка задействована, имеется три положительных полюса в 5 градусов сзади, они притягиваются в сторону вращения, и три отрицательных полюса в 5 градусов впереди, толкают ротор в сторону вращения вала. Рабочая обмотка всегда расположена между отрицательным и положительным полюсами.
Схема подключения обмоток
Шаговые моторы принадлежат к моторам с несколькими фазами. Чем больше фаз, тем работа двигателя мягче, но и выше стоимость. Момент вращения не зависит от числа фаз. Большое применение получили двигатели с 2-мя фазами. Двигатели подключают тремя типами схем для 2-фазных шаговых моторов. Катушки соединены друг с другом, применено разное количество проводов для соединения двигателя с контроллером.
Биполярный двигатель
Это самая простая конструкция, применяется четыре провода для соединения мотора с контроллером. Катушки подключены параллельно или последовательно.
Параллельное или последовательное подключение
Двигатель имеет 4 контакта. Два желтых экрана подключают вертикальную катушку, два розовых – горизонтальную. Проблема в изменении полярности, можно изменить направление тока, драйвер станет сложнее.
Униполярный двигатель
Применяя общий провод, изменяют полюса магнитов. Если соединить общий провод с землей, один и другой вывод катушки к питанию, то полюса изменятся. Схема соединения двигателя биполярного типа простая для понимания, она обычно состоит из 2-х транзисторов на одну фазу.
Подключение с общим проводом
Недостаток – применение половины катушек, как при волновой управляемости электромотором. Момент вращения получается равным половине возможного значения. Униполярные электромоторы необходимо изготавливать по двойным размерам, для обеспечения сопоставимого момента. 1-полярный электромотор имеет возможность применяться в качестве биполярного мотора. Для этой цели необходимо провод отключить.
Униполярные шаговые электродвигатели имеют несколько вариантов подключения.
Общий провод соединен внутри
Шаговый мотор с 8-ю выводами
Это мотор с гибким подключением, обмотки оснащены выводами с обеих сторон. Можно подключать двигатель по любому методу:
- Униполярный с 5 или 6 выводами.
- Биполярный с последовательной схемой.
- С параллельной схемой.
- С малым током.
Подключение 4 обмоток
Шаговые электродвигатели Лавета
Моторы Лавета используются в электрических часах. Их конструкция сделана для эксплуатации с одним фазовым сигналом. Моторы Лавета обладают возможностью делать их конструкцию миниатюрной, применяются для исполнительной части часов ручного ношения. Этот тип моторов изобрел инженер Мариус Лавет. По его имени назвали тип шаговых двигателей.
Лавет – выпускник школы электрики изобрел двигатель, который дал ему известность во всем мире. Вид статора похож на статор электромотора с расщепленными полюсами. Имеется одна обмотка, полюса созданы витками с одним проводом из медной жилы толстого сечения, расположены на магнитном проводе, образуют необходимую фазу. Токи индукции образуют необходимый момент вращения.
Магнитное поле распространяется с задержкой, применяется для сдвига фаз, на прямой угол 90 градусов, чтобы имитировать напряжение из двух фаз. Конструкция ротора создана в виде постоянного магнита. Конструкции такого типа имеют широкую сферу применения в технике для быта (миксерах, блендерах). Моторы Лавета отличаются тем, что из-за зубцов вал стопорится с определенным шагом. Результатом этого возможно движение стрелки секунд. Разновидность двигателя Лавета не предназначена для реверсивной работы, как и большинство шаговых моторов.