


§ 1.5. Самоход и пути его устранения
Самоходом называется вращение двигателя при отсутствии сигнала управления. На практике различают два вида самохода: 1) технологический и 2) параметрический.
Т е х н о л о г и ч е с к и й самоход проявляется в начале вращения двигателя при подаче только напряжения возбуждения.
Причинами технологического самохода являются слабые эллиптические поля, возникающие в двигателе, благодаря наличию короткозамкнутых контуров в сердечниках и обмотках из-за их плохой изоляции, благодаря неравномерности воздушного зазора, неодинаковой магнитной проводимости стали вдоль и поперек проката и другим факторам технологического характера, приводящим к разделению магнитного потока возбуждения на два, сдвинутых в пространстве и во времени. Как известно, этого достаточно для возникновения вращающихся полей (см. асинхронный двигатель с экранированными полюсами).
Для устранения технологического самохода необходима тщательная технологическая проработка двигателя и высокая культура его производства: хорошая изоляция обмотки и листов стали, точная механическая обработка деталей, обязательна вееробразная шихтовка пакетов — смещение каждого последующего листа на одно зубцовое деление относительно предыдущего.
П а р а м е т р и ч е с к и й самоход проявляется в продолжении вращения двигателя после снятия сигнала управления.
При снятии сигнала управления исполнительный двигатель становится однофазным, который хотя и не имеет собственного пускового момента, но, будучи раскрученным, продолжает работать. Для исполнительного двигателя такое явление не допустимо.
С целью устранения
параметрического самохода асинхронные
исполнительные двигатели изготавливаются
с роторами, имеющими большое активное
сопротивление. В результате момент
однофазной машины становится не движущим
(+) а тормозящим (-), в чем легко убедиться,
рассматривая характеристики двух
однофазных двигателей с различными
критическими скольжениями: s
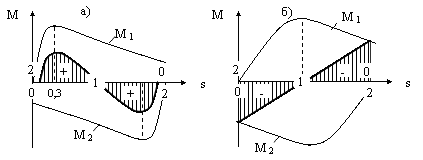
Рис. 1.14. Механические характеристики однофазного двигателя с sk = 0,3 (а) и sk = 1 (б)
Таким образом, критические
скольжения асинхронных исполнительных
двигателей должны быть равными или
большими единицы. В реальных двигателях
s
Критерий (условие) отсутствия самохода найдем на основании схемы замещения однофазного асинхронного двигателя (рис. 1.15)
В отличии от известной схемы [1], здесь отсутствуют индуктивные сопротивления ротора, которыми мы пренебрегли ввиду их малости по сравнению с активными сопротивлениями rр.

Рис. 1.15. Схема замещения однофазного асинхронного двигателя
Преобразуем эту схему, заменив параллельные контуры последовательными (рис.1.16)
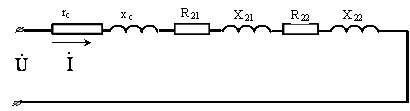
Рис. 1.16. Преобразованная схема замещения однофазного асинхронного двигателя
Электромагнитная мощность однофазного двигателя с точки зрения превращения ее в полезную механическую мощность равна разности электромагнитных мощностей прямой и обратной последовательностей

Самоход будет отсутствовать, если электромагнитная мощность машины будет равна нулю или даже отрицательной, т.е. Рэм
 (1.12)
(1.12)
Полные сопротивления вторичного контура преобразованных схем замещения
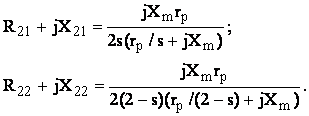
Их активные составляющие соответственно

Подставляя значения R21 и R22 в (1.12), получим

Если учесть, что для режима электромагнитного тормоза начальное скольжение s = 1, окончательно

Таким образом, для устранения самохода исполнительный двигатель должен иметь активное сопротивление ротора, приведенное к статору, большим или равным реактивному сопротивлению взаимной индуктивности.
При этом еще раз следует напомнить, что большое активное сопротивление ротора приводит к значительным потерям в обмотках, снижению КПД и ухудшению использования машины.
§ 17.4. Асинхронные исполнительные двигатели
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется

Рис. 17.7. Схема включения
асинхронного исполнительного двигателя
преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования — отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) — постоянно включена в сеть с напряжением U1, а на другую — обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 17.7).
Для работы двухфазного ИД необходимо вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. Поэтому рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно
из основных требований к ИД — отсутствие
самохода.
Известно,
что обычные асинхронные двигатели имеют
небольшое активное сопротивление
обмотки ротора и работают с малым
критическим скольжением (см. § 13.3). Такие
двигатели непригодны в качестве
исполнительных, так как они обладают
самоходом, т. е. при снятии сигнала
управления двигатель будет продолжать
работать как однофазный. Это
иллюстрирует рис. 17.8, а,
на
котором
точка А
определяет
режим работы двигателя с нагрузочным
моментом М

Рис. 17.8. Устранение самохода в асинхронном
исполнительном двигателе
работы
двигателя «определяется точкой В
на
характеристике однофазного двигателя.
При этом электромагнитный момент
двигателя останется положительным.
Если же увеличить активное сопротивление
ротора, то форма кривых прямого М
способствуют увеличение пускового момента, уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.

Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
Асинхронный двигатель: принцип работы, особенности конструкции
 Асинхронный двигатель представляет собой мотор переменного тока, скорость вращения которого не равна частоте напряжения в обмотках статора. Эти электродвигатели получили широкое распространение, потому что являются достаточно выносливыми. Асинхронный однофазный, трехфазный моторы могут работать при значительной нагрузке продолжительное время, не перегреваясь, держать свой крутящий момент. Работа асинхронного двигателя проста, но при этом его характеристики напрямую зависят от параметров обмоток и технологии их укладки.
Асинхронный двигатель представляет собой мотор переменного тока, скорость вращения которого не равна частоте напряжения в обмотках статора. Эти электродвигатели получили широкое распространение, потому что являются достаточно выносливыми. Асинхронный однофазный, трехфазный моторы могут работать при значительной нагрузке продолжительное время, не перегреваясь, держать свой крутящий момент. Работа асинхронного двигателя проста, но при этом его характеристики напрямую зависят от параметров обмоток и технологии их укладки.
Область применения
Асинхронный двигатель получил широкое распространение в качестве тягового, второстепенного и прочих видов силовых компонентов. Учитывая особенности его конструкции, отсутствие скользящих контактов, эксплуатация такого мотора намного проще. Также, схема подключения не требует сложных устройств управления, если говорить о простом режиме работы с постоянной частотой. Плюс ко всему и срок службы до сервисного обслуживания намного дольше, так как внутреннее пространство и обмотки не загрязняются графитом.
Применяется асинхронный электродвигатель во многих сферах:
 Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.
Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.- Конвейеры – благодаря высокому моменту, способности его поддерживать при нагрузках моторы асинхронного типа стали идеальным вариантом для реализации управления подвижными производственными линиями.
- Следящие системы и приводные устройства – особо часто применяют асинхронные двигатели в приводных системах на технологическом оборудовании. Но для организации управления таким типом двигателя потребуется особая схема подключения и частотный блок управления, а ротор асинхронного двигателя оснащается неодимовыми магнитами. Такие моторы рассчитаны на работы с частотой до 400 Гц.
- Бытовая сфера. Из такого мотора можно сделать различные рабочие агрегаты бытового назначения или для небольшой мастерской: вентилятор, управляемые заслонки, циркулярная пила, фуганок, прочее оборудование.
 Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.
Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.Разновидности моторов
От типа питающей сети асинхронные электродвигатели подразделяются на:
- Трехфазные. Обмотки асинхронных двигателей такого типа состоят из 3 катушек, специальным образом уложенных в пазах статора. Они предназначены для работы в промышленности, так как имеют высокий КПД и cosφ приближенный к 1, а для обеспечения дополнительной экономии работают с системой рекуперации энергии при торможении, выступая генератором.
- Однофазный асинхронный двигатель. Применяется в быту и промышленности: старые стиральные машины, бытовые вентиляторы, холодильное и прочие виды оборудования. Имеют меньший КПД, мощность, по сравнению с трехфазными, что объясняется потерями в статоре из-за отсутствия дополнительной фазы.
 Трехфазные. Обмотки асинхронных двигателей такого типа состоят из 3 катушек, специальным образом уложенных в пазах статора. Они предназначены для работы в промышленности, так как имеют высокий КПД и cosφ приближенный к 1, а для обеспечения дополнительной экономии работают с системой рекуперации энергии при торможении, выступая генератором.
Трехфазные. Обмотки асинхронных двигателей такого типа состоят из 3 катушек, специальным образом уложенных в пазах статора. Они предназначены для работы в промышленности, так как имеют высокий КПД и cosφ приближенный к 1, а для обеспечения дополнительной экономии работают с системой рекуперации энергии при торможении, выступая генератором.Устройство асинхронного двигателя
Устройство асинхронного двигателя является достаточно простым:
- Статор – является неподвижной частью электрического двигателя, который снабжен обмотками возбуждения.
- Ротор – вращающийся элемент мотора, который крутится под действием магнитного поля, создаваемым обмотками возбуждения, расположенными на статоре. Различают 2 типа двигателя от конструкции ротора: короткозамкнутые и фазные.
- Фланцы – статическая часть электрического двигателя, в которой находятся опорные подшипники, удерживающие ротор и являющиеся своего рода крепежом для статора. Он зажимается между двумя фланцами-крышками стяжными болтами. Либо они прикручены к корпусу статора.
- Клеммная коробка – часть статической конструкции двигателя, в которую выводятся концы обмоток со статора. Посредством его осуществляется подключение двигателя к схеме управления.
- Крыльчатка и защитный кожух – используется для обеспечения принудительной вентиляции, а кожух предохранит обслуживающий персонал от травматизма.
- Дополнительные сервисные обмотки – при необходимости совместно с обмоткой возбуждения на статоре может быть дополнительная, предназначенная для контроля и измерения рабочих параметров мотора во время его работы.
- Термодатчики – промышленные асинхронные двигателя, кроме обмоток, также имеются датчики температуры, контролирующие перегрев на случай резкого возрастания тока потребления.
Также двигателя могут быть оборудованными планарными редукторами и изготовленными в едином корпусе. Это преимущественно промышленные типы агрегатов, применяемые на станках, конвейерах и прочих видах оборудования.
Особенности устройства каждого из элементов
 Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из листов специальной электротехнической стали толщиной до 0.5 мм, покрытых лаком. Этот цилиндр является сердечником, с внутренней стороны имеются пазы, куда укладываются обмотки. В трехфазных, соответственно, сдвинутые на 120 градусов, в однофазных – на 90. Обмотки могут быть уложены несколькими способами в зависимости от схемы их подключения и эксплуатационных требований. Именно от этого зависит такой показатель, как момент и мощность на валу. А при наличии количества полюсов более, чем 2 пары, то он может использоваться в следящих системах управления приводными механизмами.
Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из листов специальной электротехнической стали толщиной до 0.5 мм, покрытых лаком. Этот цилиндр является сердечником, с внутренней стороны имеются пазы, куда укладываются обмотки. В трехфазных, соответственно, сдвинутые на 120 градусов, в однофазных – на 90. Обмотки могут быть уложены несколькими способами в зависимости от схемы их подключения и эксплуатационных требований. Именно от этого зависит такой показатель, как момент и мощность на валу. А при наличии количества полюсов более, чем 2 пары, то он может использоваться в следящих системах управления приводными механизмами.
Статор запрессован в корпус либо же расположен между фланцами. Корпус и боковые крышки изготовлены из чугуна или сплава алюминия. На них имеются ребра для увеличения площади и повышения эффективности отведения тепла при работе. Такое устройство позволяет лучше охлаждать двигатель, обеспечивая продолжительную работу при предельных нагрузках.
Однополюсная обмотка такого электродвигателя наматывается из 3-х катушек. Каждая из них называется фазой. Для достижения требуемых параметров работы мотора обмотка укладывается в противоположных пазах сердечника. Катушки соединяются между собой специальным образом в соответствии со схемой подключения и ожидаемых характеристик, обеспечивая возбуждение магнитного поля и необходимый момент при вращении.
Все концы датчиков выводятся в клеммную коробку, что позволяет их соединять в звезду или треугольник, что зависит от схемы подключения системы управления, величины питания. 3-фазный электродвигатель является универсальным, при необходимости его можно подключать к однофазному питанию с линейным напряжением. При соединении обмоток треугольником напряжение обмоток равно линейному Uф, а при подключении по схеме звезды – √3Uф.
Ротор
 Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Для того чтобы обмотка надежно удерживалась в сердечнике, имеются специальные пазы, куда она запрессована. Торцевые кольца могут быть снабжены вентиляционными лопатками, предназначенными для улучшения интенсивности охлаждения внутреннего пространства. Вал закреплен на подшипниках, впрессованных во фланцы или плитах, закрепленных к станине в зависимости от устройства.
Между валом и статором имеется зазор, величина которого зависит от пусковых параметров мотора. Если необходимо увеличить мощность и момент, то он должен быть как можно меньше. Одновременно с ростом мощности увеличиваются и добавочные потери в верхних слоях статора и ротора.
Принцип работы
Асинхронный двигатель принцип работы имеет достаточно простой. Он основан на двух физических явлениях:
- При подаче напряжения на статорные обмотки в двигателе возникает вращающееся магнитное поле.
- Поле оказывает воздействие на ток, индуцируемый в роторе. А это создает крутящий момент, поворачивающий вал двигателя относительно полюсов.
За каждый поворот вала полюса меняются полярностью с частотой сети. Поэтому напряжение обмотки статора имеет стандартную частоту, а скорость вращения зависит от:
- нагрузки на валу;
- количества пар полюсов;
- особенностей намотки статора.
Маркировка электродвигателя
Для упрощения процесса подключения и выбора схемы асинхронного 3-фазного ЭД на каждом из них имеется соответствующая маркировка. В ней указываются такие характеристики, как:
- крутящий момент;
- мощность;
- максимальная скорость вращения;
- cosφ.
Также в зашифрованной маркировке имеется указание типа двигателя, количества полюсов. Их необходимо учитывать при выборе мотора для тех или для других нужд. А для облегчения процесса подключения все концы сводятся в клеммную коробку, где подписаны следующим образом:
Если мотор подключается к сети 380 В с линейным напряжением обмоток 220В, то его схема обмоток должна быть треугольником. Но если двигатель подключается к стандартной сети 380В, то схема включения обмоток должна быть звездой.
Скольжение
 При рассмотрении принципа работы асинхронного электрического двигателя применяют такое понятие, как скольжение, и обозначается параметр буквой «s». Оно возникает из-за разницы в скоростях вращения магнитного поля статора и реальной частоты вращения ротора. При этом первый показатель на порядок больше. Следовательно, чем выше разница, тем сильнее скольжение.
При рассмотрении принципа работы асинхронного электрического двигателя применяют такое понятие, как скольжение, и обозначается параметр буквой «s». Оно возникает из-за разницы в скоростях вращения магнитного поля статора и реальной частоты вращения ротора. При этом первый показатель на порядок больше. Следовательно, чем выше разница, тем сильнее скольжение.
Скольжение позволяет объяснить принцип работы. За счет отставания частоты вращения ротора от магнитного поля статора и обеспечивается наведение ЭДС в короткозамкнутом роторе. Но если бы поле вращалось со скоростью частоты ЭДС в роторе, то собственно вращения не происходило.
Скольжение, являясь относительной величиной, измеряется в %. И становится больше при увеличении нагрузки на валу двигателя.
Двигателя с фазным ротором
Когда речь идет о моторах с фазным ротором, то он имеет немного иное устройство. Также имеется 3 обмотки, которые соединены в звезду, а их начала выведены на подводящие кольца. Сравнивая два типа двигателя с короткозамкнутым и фазным роторами, то у второго развивается момент сразу же под высокой нагрузкой. Такие моторы получили применение в системах, где требуется сделать мощный приводной агрегат с высокой тягой. Также такие моторы являются более удобными для регулируемого управления посредством регулятора частоты.
Недостатки асинхронных электродвигателей
В стандартном исполнении без магнитов на роторе асинхронные электродвигатели являются маломощными. Они неспособны сразу обеспечить высокий крутящий момент. А также для их запуска требуется большое количество электрической мощности, которая может превышать предельно допустимые показатели системы питания. Поэтому их пуск должен выполняться без нагрузки. Кроме этого, асинхронные электродвигатели являются мощными источниками электромагнитных помех, сопровождающимися сбоями в работе различных других устройств, находящихся вблизи. Для снижения их влияния необходимо предусматривать качественное заземление и обязательное экранирование.
Способы регулирования скорости асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.6.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0и скольжениемs:
ω = ω0 – sабс
ω = ω0 – ω0s (6.1)

Рис.6.1. Классификация способов регулирования асинхронных двигателей
Исходя из (6.1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора _f1, и числом пар полюсов двигателярп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно. Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
Регулирование скорости асинхронного двигателя изменением величины питающего напряжения при постоянной (стандартной) его частоте для асинхронных двигателей с короткозамкнутым ротором имеет ограниченное применение вследствие того, что регулирование скорости здесь сопряжено с потерями энергии скольжения, выделяющимися в роторе двигателя и ведущими к его перегреву. Получаемые при этом способе механические характеристики неблагоприятны для качественного регулирования. Диапазон регулирования не превышает 1,5:1; более глубокое регулирование скорости можно допускать только кратковременно. Исходя из данной оценки, регулирование изменением величины питающего напряжения применяется, главным образом, только для обеспечения плавного пуска нерегулируемых асинхронных электроприводов или для кратковременного снижения скорости. Иногда этот способ регулирования используется для регулирования скорости насосов и вентиляторов (механизмов с вентиляторным характером нагрузки) небольшой мощности (до 15 кВт), однако и в этом случае необходимо увеличение установленной мощности двигателя.
Для асинхронных двигателей с фазным ротором регулирование скорости может производиться воздействием на роторную цепь двигателя. При введении добавочного сопротивления в цепь ротора энергия скольжения рассеивается не в объеме двигателя, а в сопротивлениях. Этот способ регулирования оценивается как неэкономичный. При использовании релейно-контакторных схем исключается плавность регулирования скорости. В настоящее время управление с введением добавочных сопротивлений в цепь ротора используется, в основном, для пуска асинхронных двигателей с фазным ротором. Электроприводы с реостатно-контакторным управлением не рассматриваются нами, как регулируемые электроприводы.
Все способы регулирования, основанные на изменении скольжения асинхронного двигателя, связаны с выделением энергии скольжения в роторной цепи двигателя. В рассматриваемых выше способах эта энергия расходовалась на нагрев обмотки ротора и роторных сопротивлений. Существуют системы регулируемого электропривода, в которых энергия скольжения не теряется в сопротивлениях, а используется полезно – возвращается в питающую сеть, что делает регулирование в этих системах экономичным. К таким системам регулируемого привода относятся асинхронные вентильные каскады и двигатели двойного питания. Особенностью каскадных схем асинхронного привода является ограниченный диапазон регулирования – не больше, чем 2:1. В этом диапазоне каскадные схемы обеспечивают плавное и экономичное регулирование скорости. Такие системы электропривода наиболее целесообразны для мощных турбомеханизмов-насосов и вентиляторов.
6.3 Работа асинхронной машины при вращающемся роторе
В статорной обмотке при переходе от неподвижного ротора к подвижному практически ничего не меняется, если U1 = const и f1 = const. В роторной же обмотке изменяется частота ЭДС из-за возникновения скольжения,
f2S=f1s. (6.8)
Таким образом, частота ЭДС (тока), наводимая вращающимся полем в роторе, равна частоте сети, умноженной на скольжение.
При работе асинхронной машины двигателем частота f2Sобычно весьма невелика; если, например,f1= 50 Гц, а скольжениеsHпри номинальной нагрузке составляет 1–4 %, то
f2S= 50∙(0,01 – 0,04) = 0,5 – 2 Гц.
ЭДС и индуктивное сопротивление обмотки вращающегося ротора:
 ;
(6.9)
;
(6.9)
 ,
(6.10)
,
(6.10)
где L2σ– индуктивность рассеяния фазной обмотки ротора;
E2иx2– ЭДС и индуктивное сопротивление фазной обмотки неподвижного ротора.
Активное сопротивление обмотки ротора при малой частоте тока в ней можно считать неизменным, т. е. r2=const, тогда по закону Ома ток в роторной обмотке
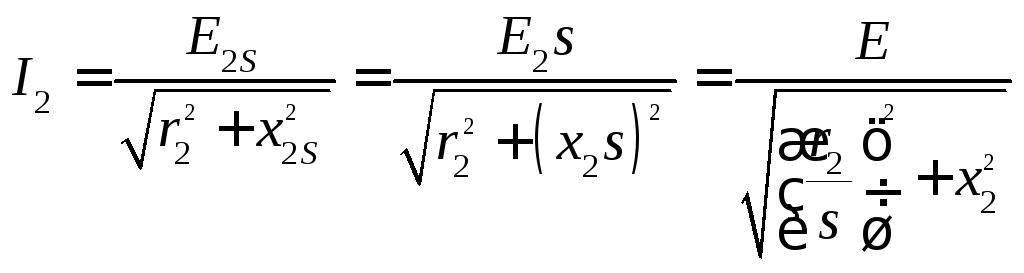 . (6.11)
. (6.11)
Уравнение (6.11) позволяет режим двигателя с вращающимся ротором привести к эквивалентному режиму при неподвижном роторе. В этом режиме во вторичной цепи при вращении ротора вместо ЭДС E2Sс частотойf2Sбудет существовать ЭДС при неподвижном ротореE2с частотойf1, а вместо индуктивного сопротивления при вращении ротораx2Sво вторичной цепи действует индуктивное сопротивление при неподвижном ротореx2. Для сохранения величины и фазы токаI2необходимо вместоr2ввести новое со
противление r2/s. Представимr2/sкак
 .
(6.12)
.
(6.12)
Тогда эквивалентная схема роторной цепи имеет вид рисунка 6.1, а Т–образная схема замещения для приведенной машины – вид рисунка 6.2. Последняя получена на основании основных уравнений асинхронной машины:
 ;
;
 ;
(6.13)
;
(6.13)
 .
.

Рисунок 6.1 – Эквивалентная схема роторной цепи

Рисунок 6.2 – Т-образная схема замещения асинхронного двигателя
На схеме замещения r1и x1 – фазное активное и индуктивное
сопротивления статорной обмотки; r2
и x2
– аналогичные приведенные сопротивления
роторной обмотки; rm и xm – параметры намагничивающей ветви; – элемент, на котором выделяется
электрическая мощность, равнаямеханической мощности на валу двигателя.
– элемент, на котором выделяется
электрическая мощность, равнаямеханической мощности на валу двигателя.
6.4 Вращающий момент асинхронного двигателя
Если считать, что двигатель работает в установившемся режиме, т. е. при n=const, то в этом случае, по условию равновесия моментов,
M=M0+M2,
где M – вращающий момент, развиваемый двигателем;
M0иM2– моменты сопротивления при холостом ходе двигателя и его нагрузки.
Момент M2задаётся рабочим механизмом, на который работает двигатель. Соответствующая ему полезно развиваемая двигателем мощностьР2определяется в виде
 ,
,
где ω – угловая частота вращения ротора.
Моменту холостого хода М 0соответствует мощность
 .
.
Вращающий момент двигателя Мобразуется в результате взаимодействия вращающегося магнитного потока Ф и тока в ротореI2. Но поле Ф вращается с угловой частотойω1, следовательно, развиваемая им электромагнитная мощность
Рэм=Мω1 .
Из энергетической диаграммы также следует, что
Рэм=Рмех+ ∆РМ2=Мω+ ∆РМ2,
где ∆РМ2– потери в обмотке ротора, .
.
Следовательно, Рэм – Рмех = М (ω1 – ω)
= ∆PM2или ,
откуда
,
откуда
 . (6.14)
. (6.14)
Если в Т-образной схеме замещения асинхронного двигателя намагничивающую ветвь (xm,rm) вынести на входные зажимы так, чтобы токI0не изменился, то получим Г-образную схему замещения двигателя. Последняя имеет вид рисунка 6.3.
Из Г-образной схемы замещения двигателя имеем
 . (6.15)
. (6.15)
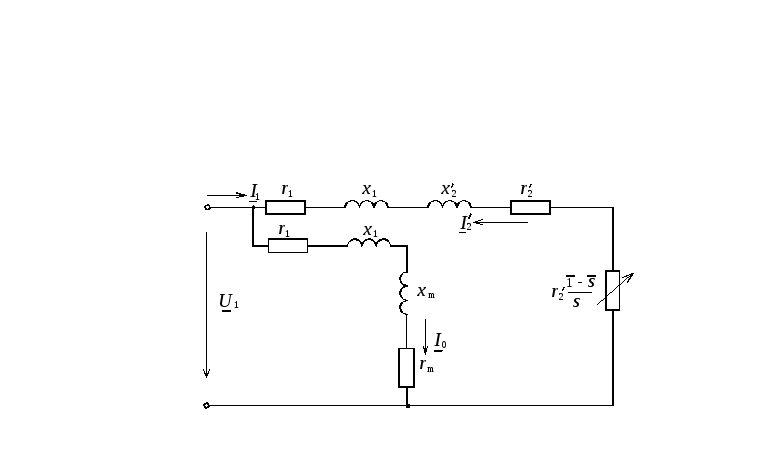
Рисунок 6.3 – Г-образная схема замещения асинхронного двигателя
Подставляя значение тока  в (6.14), получим
в (6.14), получим
 ,(6.16)
,(6.16)
где  .
.
Из выражения (6.16) следует, что вращающий момент асинхронного двигателя пропорционален квадрату приложенного напряжения питания. Отмеченное является недостатком асинхронного двигателя. Так, если напряжение сети уменьшится на 20 %, то развиваемый двигателем момент снизится на 36 %.
Вращающий момент двигателя также
зависит от соотношения параметров его
рабочей цепи  и
и .
.
При пуске двигателя n= 0,s= +1, имеем пусковой моментМП. Если моментМПдостаточен для преодоления статического моментаМ0+М2, то
начнется разгон двигателя, т. е. двигатель будет увеличивать частоту вращения до тех пор, пока его момент Мне станет равным моментуМ0+М2. В соответствии с этим скольжение будет уменьшаться от значенияs= +1 до определенной величины.
Так как обычно xК > rК,
то при уменьшении s (см. формулу (6.16)) будут одновременно
увеличиваться и числитель, и знаменатель;
сначала, при больших s,
преобладающее значение имеет числитель,
вследствие чего момент М возрастает, а затем, при скольжениях s = 0,12 … 0,2, преобладающее значение получает
знаменатель, куда отношение  входит в квадрате. Этоприводит к тому, что момент М,
достигнув наибольшего значения МКР = Мmax,
начинает уменьшаться и при s = 0 становится равным нулю.
входит в квадрате. Этоприводит к тому, что момент М,
достигнув наибольшего значения МКР = Мmax,
начинает уменьшаться и при s = 0 становится равным нулю.
Зависимость М = f(s) при постоянстве U1 и f1 называется механической характеристикой асинхронного двигателя. Последняя имеет вид рисунка 6.4.
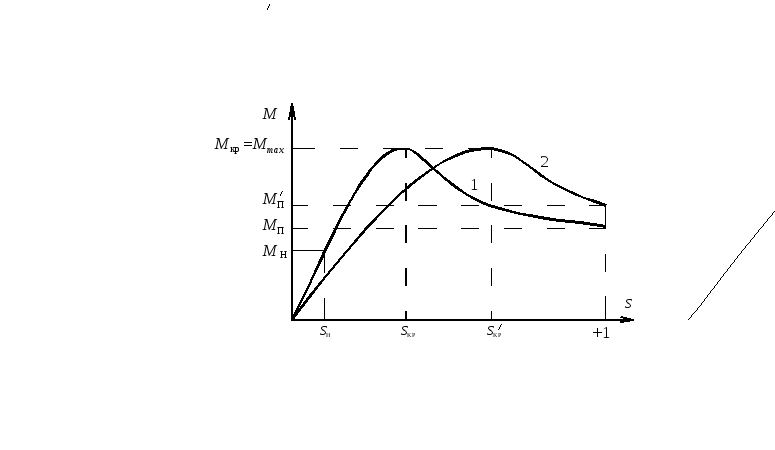
Рисунок 6.4 – Механическая характеристика асинхронного двигателя
Ч тобы
определитьМКР,
сначала находят то скольжение sКР,
при котором двигатель развивает этот
момент. Для того, по общему правилу,
берут производную
тобы
определитьМКР,
сначала находят то скольжение sКР,
при котором двигатель развивает этот
момент. Для того, по общему правилу,
берут производную  и приравнивают ее к нулю, т. е. решают
уравнение
и приравнивают ее к нулю, т. е. решают
уравнение .
.
Так как эта операция носит обычный математический характер, то дос
таточно привести её конечный результат. При некоторых допущениях имеем
 ,(6.17)
,(6.17)
тогда максимальный момент (критический момент) будет
 .(6.18)
.(6.18)
При номинальном режиме работы двигатель имеет sН и МН. Отношение максимального момента к номинальному характеризует перегрузочную способность двигателя
λ .(6.19)
.(6.19)
Для короткозамкнутых асинхронных двигателей λ = 1,8 … 2,5. Более высокие значения λ соответствуют двигателям с меньшим числом полюсов.
Критическое скольжение двигателя
 . (6.20)
. (6.20)
Для расчета механической характеристики можно использовать упрощенную формулу Клосса,
 ,(6.21)
,(6.21)
где s– скольжение, при котором определяется моментМ.
Имея каталожные данные о МН,sНи ,
из формулы (6.21) определяемsКРи, задаваясь скольжениемs,
находим моментМдля данногоs.
,
из формулы (6.21) определяемsКРи, задаваясь скольжениемs,
находим моментМдля данногоs.
Формула Клосса вместе с выражением для определения частоты вращения ротора n=n1(1 –s) позволяет получить механическую характеристику в виде зависимостиn=f(M), которая представлена на рисунке 6.5. Анализ данного рисунка показывает, что асинхронные двигатели на рабочем участке имеют жесткую механическую характеристику, т. е. такую, при которой частота вращения мало изменяется при увеличении нагрузки.
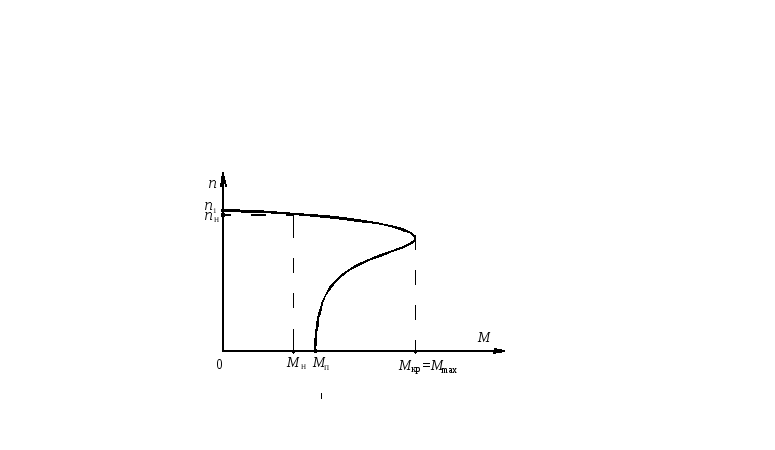
Рисунок 6.5 –Механическая характеристика асинхронного двигателя
Анализ зависимости M= f(s),
(см. уравнение (6.16)) показывает, что
максимальный моментМКРне зависит от активного сопротивления
обмотки ротора (см. формулу (6.18)), однако согласно
выражению (6.17) это сопротивление
оказывает влияние на скольжениеsКР,
при котором асинхронный двигатель
развивает максимальный момент. Отмеченное
используют в двигателях с фазным
ротором. При пуске таких двигателей в
цепь ротора включают пусковой реостатr2 пуск, при этом возрастаетsКР,
максимальный моментМКР,
не изменяясь по величине, смещается в
сторону больших скольжений, отчего
возрастает пусковой моментМП,
что облегчает пуск двигателя (кривая
2 на рисунке 6.4). Одновременно включениеr2пускуменьшает пусковой токI2пуск,
а следовательно, иI1пуск.
(см. формулу (6.18)), однако согласно
выражению (6.17) это сопротивление
оказывает влияние на скольжениеsКР,
при котором асинхронный двигатель
развивает максимальный момент. Отмеченное
используют в двигателях с фазным
ротором. При пуске таких двигателей в
цепь ротора включают пусковой реостатr2 пуск, при этом возрастаетsКР,
максимальный моментМКР,
не изменяясь по величине, смещается в
сторону больших скольжений, отчего
возрастает пусковой моментМП,
что облегчает пуск двигателя (кривая
2 на рисунке 6.4). Одновременно включениеr2пускуменьшает пусковой токI2пуск,
а следовательно, иI1пуск.
Полезная мощность, отдаваемая двигателем рабочему механизму, Вт,
 ,
(6.22)
,
(6.22)
где M– момент на валу двигателя, Н·м;
n – частота вращения ротора, об/мин.
Активная мощность, потребляемая двигателем из сети,
 , (6.23)
, (6.23)
где U1Л– линейное напряжение сети;
I1Л– линейный ток, потребляемый из сети;
φ1– угол сдвига фаз между током и напряжением.
Коэффициент полезного действия двигателя
 .
(6.24)
.
(6.24)
Регулирование скорости асинхронного двигателя
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя