


Как запустить шаговый двигатель без электроники своими руками
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось — я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
Я взял вот такой двигатель.
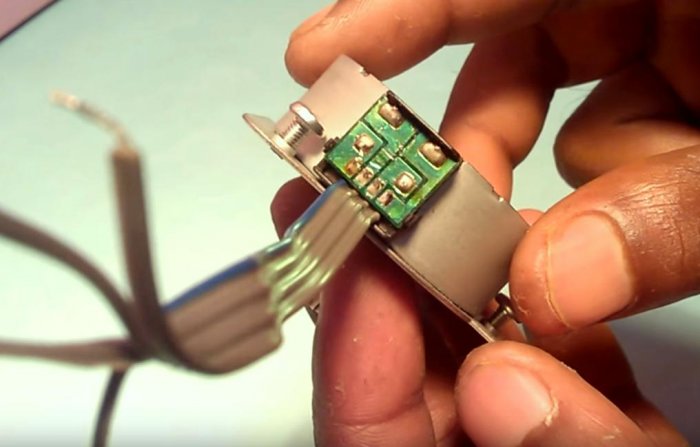
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
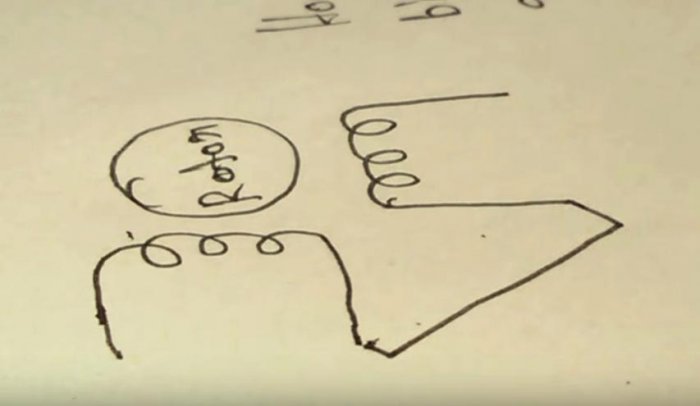
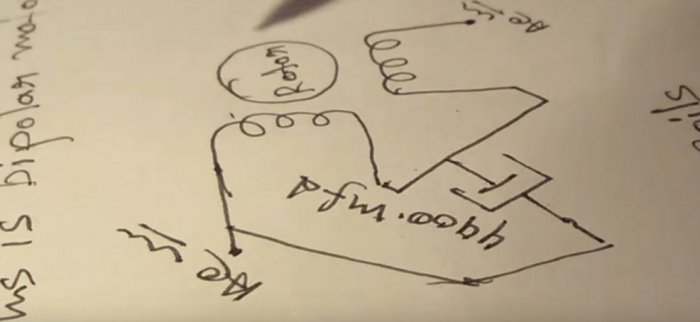
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
Очень похоже на схему обычного асинхронного двигателя.
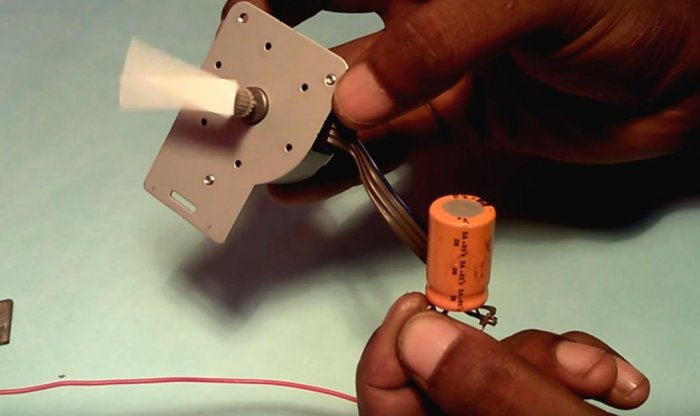
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
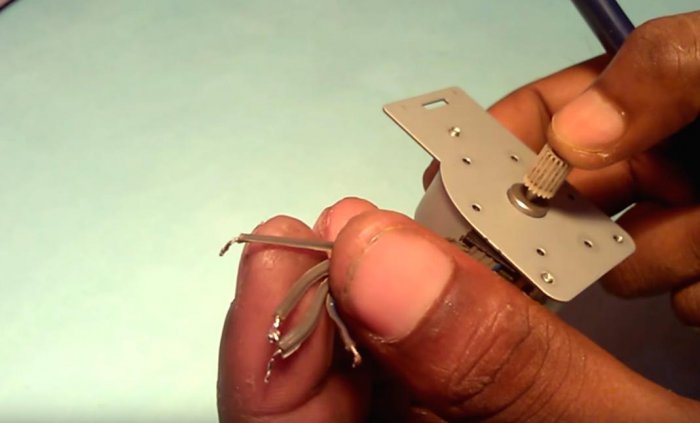
Замыкаем обмотки последовательно.
Середину проводов скручиваем и запаиваем.
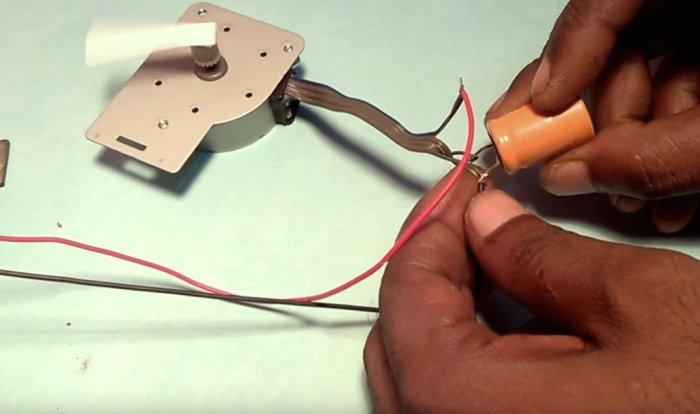
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.

Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Введение в устройство шаговых двигателей

Если вы когда-либо имели удовольствие демонтировать старый принтер, чтобы сохранить электронные компоненты, то можете столкнуться с множеством цилиндрических загадочных моторов с 4 или более проводами, выступающими из сторон. Возможно, вы слышали характерное жужжание настольного 3D-принтера или глючную электромеханическую симфонию дисков в CD приводе? Если так, то вы столкнулись с шаговым двигателем!
Шаговые двигатели заставляют электромеханический мир вращаться ( с более высоким крутящим моментом!), но в отличие от обычного двигателя постоянного тока, управление шаговым двигателем требует чуть больше, чем ток через два провода. В этой статье будет рассказано о теории проектирования и эксплуатации шагового двигателя. Как только рассмотрим основы, автор данного руководства покажет, как построить простые схемы для управления шаговыми двигателями, а затем как использовать специальные микросхемы драйверов.

Кому может понадобиться более двух проводов и Н-мост? Зачем? Ну, в отличие от обычных щеточных двигателей постоянного тока, построенных для максимального числа оборотов (или кВ для RC), шаговые двигатели представляют собой бесщеточные двигатели, рассчитанные на высокий крутящий момент (впоследствии меньшую скорость) и более точное вращательное движение. В то время как типичный двигатель постоянного тока отлично подходит для вращения гребного винта на высокой скорости для достижения максимальной тяги, шаговый двигатель лучше подходит для прокатки листа бумаги синхронно со струйным механизмом внутри принтера или для осторожного вращения вала линейного рельса в мельнице с ЧПУ.
Внутри шаговые двигатели являются более сложными, чем простой двигатель постоянного тока, с несколькими катушками вокруг сердечника с постоянными магнитами, но с этой дополнительной сложностью обеспечивается больший контроль. Благодаря тщательному расположению катушек, встроенных в статор, ротор шагового двигателя может вращаться с заданным шагом, изменяя полярность между катушками и переключая их полярность в соответствии с установленной схемой зажигания. Шаговые двигатели не все сделаны одинаковыми, и для их внутреннего исполнения требуются уникальные (но базовые) схемы. Обсудим наиболее распространенные типы шаговых двигателей на следующем шаге.


Есть несколько различных конструкций шаговых двигателей. К ним относятся однополярное, биполярное, универсальное и переменное сопротивление. Мы будем обсуждать конструкцию и работу биполярных и однополярных двигателей, так как это наиболее распространенный тип двигателя.
Однополярный двигатель
У однополярных двигателей обычно есть пять, шесть или восемь проводных выводов, идущих от основания, и одна катушка на фазу. В случае пятипроводного двигателя пятый провод представляет собой соединенные центральные отводы пар катушек. В шестипроводном двигателе каждая пара катушек имеет собственный центральный отвод. В двигателе с восемью проводами каждая пара катушек полностью отделена от других, что позволяет подключать ее в различных конфигурациях. Эти дополнительные провода позволяют приводить в действие однополярные двигатели непосредственно от внешнего контроллера с простыми транзисторами, чтобы управлять каждой катушкой отдельно. Схема зажигания, в которой приводится в действие каждая катушка, определяет направление вращения вала двигателя. К сожалению, учитывая, что за один раз подается только одна катушка, удерживающий момент однополярного двигателя всегда будет меньше, чем у биполярного двигателя того же размера. Обойдя центральные отводы однополярного двигателя, он теперь может работать как биполярный двигатель, но для этого потребуется более сложная схема управления. На четвертом шаге этой статьи мы приведем в действие однополярный двигатель, который должен прояснить некоторые из представленных выше концепций.
Биполярный двигатель
Биполярные двигатели, как правило, имеют четыре провода и являются более прочными, чем однополярный двигатель сравнительного размера, но поскольку у нас есть только одна катушка на фазу, нам нужно повернуть ток через катушки, чтобы перейти на один шаг. Наша потребность изменить ток означает, что мы больше не сможем управлять катушками напрямую с помощью одного транзистора, вместо этого — полная цепь h-моста. Построение правильного h-моста утомительно (не говоря уже о двух!), Поэтому мы будем использовать выделенный драйвер биполярного двигателя (см. Шаг 5).
Шаг 3: Понимание спецификаций шагового двигателя
Давайте поговорим о том, как определить технические характеристики двигателя. Если вы встречали двигатель квадратного сечения с определенной сборкой из трех частей (см. Рисунок три), скорее всего, это двигатель NEMA. Национальная ассоциация производителей электрооборудования имеет определенный стандарт для спецификаций двигателя, использующий простой буквенный код для определения диаметра лицевой панели двигателя, типа крепления, длины, фазного тока, рабочей температуры, фазного напряжения, шагов на оборот и проводки.
Чтение паспорта двигателя
Для следующего шага будет использован этот однополярный мотор. Выше приложена таблица данных. И хотя она краткая, она предоставляет нам все, что нам нужно для правильной работы. Давайте разберем, что в списке:
Фаза: это четырехфазный однополярный мотор. Внутренне двигатель может иметь любое количество реальных катушек, но в этом случае они сгруппированы в четыре фазы, которые могут управляться независимо.
Шаг угла: При приблизительном разрешении 1,8 градусов на шаг мы получим 200 шагов на оборот. Хотя это является механическим разрешением, с помощью микроперехода мы можем увеличить это разрешение без каких-либо изменений двигателя (подробнее об этом в шаге 5).
Напряжение: номинальное напряжение этого двигателя составляет 3 вольта. Это функция тока и номинальных сопротивлений двигателя (закон Ома V = IR, следовательно, 3V = 2A * 1,5Ω)
Ток: сколько тока нужно этому двигателю? Два ампера на фазу! Эта цифра будет важна при выборе наших силовых транзисторов для базовой схемы управления.
Сопротивление: 1,5 Ом на фазу ограничит то, какой ток мы можем подать на каждую фазу.
Индуктивность: 2,5 мГн. Индуктивная природа катушек двигателя ограничивает скорость зарядки катушек.
Удерживающий момент: это то, сколько фактической силы мы можем создать, когда на шаговый двигатель подано напряжение.
Момент удержания: это то, какой момент удержания мы можем ожидать от двигателя, когда он не находится под напряжением.
Класс изоляции: класс B является частью стандарта NEMA и дает нам рейтинг в 130 градусов Цельсия. Шаговые двигатели не очень эффективны, и постоянное потребление максимального тока означает, что они будут сильно нагреваться при нормальной работе.
Показатели обмотки: диаметр провода 0,644 мм., количество витков в диаметре 15,5, сечение 0,326 мм2
Определение пар катушек
Хотя сопротивление обмоток катушки может варьироваться от двигателя к двигателю, если у вас есть мультиметр, вы можете измерить сопротивление на любых двух проводах, если сопротивление

Благодаря расположению проводов в однополярном двигателе мы можем последовательно включать катушки, используя только простые силовые полевые МОП-транзисторы. На рисунке выше показана простая схема с МОП-транзистором. Такое расположение позволяет просто контролировать уровень логики с помощью внешнего микроконтроллера. В этом случае легче всего использовать плату Intel Edison с коммутационной платой в стиле Arduino, чтобы получить легкий доступ к GPIO (однако подойдет любой микро с четырьмя GPIO). Для этой схемы используется транзистор IRF510 N-канальный мощный MOSFET. IRF510, способный потреблять до 5,6 ампер, будет иметь достаточно свободной мощности, чтобы удовлетворить потребности двигателя в 2 амперах. Светодиоды не нужны, но они дадут вам хорошее визуальное подтверждение последовательности работы. Важно отметить, что IRF510 должен иметь логический уровень не менее 5 В, чтобы он мог потреблять достаточный ток для двигателя. Мощность двигателя в этой цепи будет 3 В.
Последовательность работы
Полное управление однополярным двигателем с помощью этой настройки очень простое. Для того, чтобы вращать двигатель, нам нужно включить фазы в заданном режиме, чтобы он вращался правильно. Чтобы вращать двигатель по часовой стрелке, мы будем управлять фазами следующим образом: A1, B1, A2, B2. Чтобы вращать против часовой стрелки, мы просто изменим направление последовательности на B2, A2, B1, A1. Это хорошо для базового контроля, но что, если вы хотите большей точности и меньше работы? Давайте поговорим об использовании выделенного драйвера, чтобы сделать всё намного проще!
Шаг 5: Платы драйверов шаговых двигателей


Если вы хотите приступить к управлению биполярными двигателями (или однополярными двигателями в биполярной конфигурации), вам нужно взять специальную плату управления драйвером. На фото выше изображен драйвер Big Easy Driver и плата-носитель драйвера шагового двигателя A4988. Обе эти платы являются печатными платами для микрошагового двухполюсного драйвера шагового двигателя Allegro A4988, который на сегодняшний день является одним из наиболее распространенных чипов для привода небольших шаговых двигателей. Помимо наличия необходимых двойных h-мостов для управления биполярным двигателем, эти платы дают много возможностей для крошечной недорогой упаковки.
Монтаж
Эти универсальные платы имеют удивительно низкое соединение. Вы можете начать управлять двигателем, используя только три соединения (только два GPIO) с вашим главным контроллером: общее заземление, шаг и направление. Ступенчатый шаг и его направление остаются плавающими, так что нужно привязать их к опорному напряжению с нагрузочным резистором. Импульс, посылаемый на вывод STEP, будет перемещать двигатель на один шаг с разрешением в соответствии с эталонными выводами микрошага. Логический уровень на выводе DIR определяет, будет ли двигатель вращаться по часовой стрелке или против часовой стрелки.
Микрошагование двигателя
В зависимости от того, как установлены выводы M1, M2 и M3, вы можете добиться увеличения разрешения двигателя с помощью микрошагования. Микрошаг включает в себя посылку разнообразных импульсов, чтобы тянуть двигатель между электромагнитным разрешением физических магнитов в роторе, обеспечивая очень точное управление. A4988 может перейти от полного шага до разрешения шестнадцатого шага. С нашим двигателем 1,8 градуса это обеспечит до 3200 шагов за оборот. Поговорим о мелких деталях!
Коды / Библиотеки
Подключение двигателей может быть легким, но как насчет управления ими? Посмотрите эти готовые библиотеки кода для управления шаговыми двигателями:
Stepper — классика, встроенная в Arduino IDE, позволяет выполнять базовый шаг и управление скоростью вращения.
AccelStepper — гораздо более полнофункциональная библиотека, которая позволяет лучше управлять несколькими двигателями и обеспечивает правильное ускорение и замедление двигателя.
Intel C ++ MRAA Stepper — библиотека более низкого уровня для тех, кто хочет углубиться в управление необработанным шаговым двигателем C ++ с помощью Intel Edison.

Этих знаний должно быть достаточно, чтобы вы поняли как работать с шаговыми двигателями в электромеханическом мире, но это только начало. 
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Генератор для велосипеда из шагового двигателя
Шаговый двигатель это не только мотор приводящий в действие всевозможный устройства (принтер, сканер и т.п), но и неплохой генератор ! Основным достоинством такого генератора является то, что ему не нужны большие обороты. Иными словами, даже при небольших оборотах шаговый двигатель вырабатывает достаточно много энергии. То есть обычному велосипедному генератору требуются начальные обороты до того пока фонарь не начнет светить ярким светом. Этот недостаток пропадает при использовании шагового двигателя.
В свою очередь шаговый двигатель обладает и рядом недостатков. Основным из них является большое магнитное залипание.
Ну да ладно. Для начала нам необходимо найти шаговый двигатель. Тут работает правило: Чем двигатель больше — тем лучше.
Здесь я представлю вам пару вариантов крепления и пару вариантов шагового двигателя.
Начнем с самого большого. Я выдрал его из плоттера для печати, это такой большой принтер. На вид двигатель выглядит довольно большим.

Перед тем как показать вам схему стабилизации и питания я хочу показать Вам метод крепления на Ваш велобайк.

Как видно из рисунка наш генератор прикручен ближе к оси колеса и вращается от дополнительного круга. Здесь нужна мысль и смекалка каждому из вас нужно самому придумать крепление и круг вращения, так как вариантов очень много.
Вот ещё один вариант с двигателем поменьше.

Детали:

Я думаю каждый из Вас при постройке выберет наиболее подходящий для него вариант.
Ну а теперь время пришло поговорить о фонарях и цепях питания. Естественно все фонари — светодиодные.
Схема выпрямления обычная : блок выпрямительных диодов, пару конденсаторов большой ёмкости и стабилизатор напряжения.

Обычно из шагового двигателя выходит 4 проводе, соответствующие двум катушкам. Поэтому на рисунке два выпрямительных блока.
Наш генератор способен вырабатывать до 50 вольт напряжения на больших оборотах, поэтому конденсаторы надо брать на напряжение не ниже 50.
А стабилизатор на напряжение 5-6 вольт.
Чем же хороша наша самоделка?! — Дело в том что даже при трогании с места наш фонарь ярко светит! И в процессе движения не мелькает и не тухнет.
Вот и всё !
Генератор для велосипеда из шагового двигателя

Автору данной самоделки пришла в голову простая, очевидная, но гениальная мысль. Ведь если учесть, что шаговый двигатель является не только моторчиком, который обеспечивает механическую работу абсолютно разных устройств (начиная от принтеров сканеров и другой офисной аппаратуры, заканчивая различными агрегатами, применяемыми в более серьезных устройствах). Шаговый двигатель так же может послужить отличным генератором электричества!
А его самый главный плюс во всем, это то, что ему вовсе не требуются большие обороты, он вполне может исправно работать и при малых нагрузках. То есть даже при минимальном действии силы направленной на него, шаговый двигатель отлично вырабатывает энергию. Самое главное, что этой энергии вполне хватит на различные нужды, вроде освещения дороги велосипедисту с помощью подключенного к шаговому двигателю фонаря.
К сожалению с обычным генератором стандартному велосипеду будут все же необходимы начальные обороты, до того как фонарик начнет испускать лучи достаточно яркого света для четкого освещения пути. Но при использовании шагового двигателя этот недостаток удаляется сам собой, то есть освещение будет подаваться сразу как только начнется вращение колеса.
Но правда у этой чудо конструкции все же будет ряд недочетов. Например наиболее явный из них, это большое магнитное залипание. Но на самом деле это не так страшно для велосипедиста.
Что приступая к работе нам будет необходимо найти некоторые детали:
1) Собственно сам шаговый двигатель.
2) парочка конденсаторов большой емкости.
3) светодиодные фонари
4) стабилизатор напряжения 5-6 вольт.
Найти шаговый двигатель довольно просто в силу того, что он весьма распространен во всех офисных приборах. Единственное что нужно понимать, это то, что чем больше шаговый двигатель — тем соответственно лучше для нас.
Тут будет описано и представлено несколько моделей шаговых двигателей и различные варианты их крепления к железному коню.
Для начала возьмем самый большой двигатель, что удалось раздобыть автору. Он демонтировал его из обычного офисного плоттера для печати( по сути это принтер, только в несколько раз большего размера).
Внешне двигатель довольно велик.

Но прежде чем приступить к изучению схемы стабилизации так же схемы питания, стоит обратить внимание на методику крепления этого агрегата к велобайку.

Если взгляните на рисунок, то поймете, что генератор расположен ближе к оси колеса и вращение передается от дополнительного круга.
И все же так как модель велосипеда у каждого своя и кто-то не захочет повреждать раму саморезами, вам будет нужно самому разработать крепление а так же круг вращения, вариантов тут действительно много.
Если же вы не представляете себе как прикрутить большой шаговый двигатель к конструкции, есть вариант поменьше:

Вам остается только выбрать вариант генератора, подходящего под размеры вашего транспортного средства.
Чтож когда с шаговыми двигателями разобрались, можно приступить и к фонарям и цепям питания.
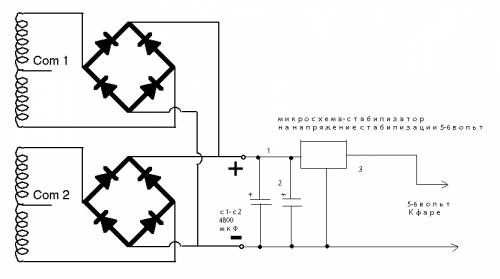
Фонари необходимо взять светодиодные. схема выпрямления будет выглядеть так: блок выпрямительных диодов, несколько конденсаторов большой ёмкости и естественно стабилизатор напряжения. В принципе это стандартная схема питания.
Шаговый двигатель стандартно имеет на выходе четыре проводка, которые соответствуют двум катушкам. именно по этой причине на изображении выпрямительных блока тоже два. Этот самодельный генератор электричества вполне может выдавать аж до 50 вольт напряжения на больших оборотах, так что, конденсаторы лучше взять соответственные( напряжение выше 50). Ну а стабилизатор на напряжение 5-6 вольт.
И так в чем же суть самоделки, и почему она понадобилась?
Все дело в его преимуществе, даже только тронувшись с места- вам путь будет уже ярко освещен фонарем, запитанным от нашего шагового двигателя- он же генератор.
Так же хотелось бы отметить, что в процессе движения фонарь не будет мигать или тухнуть- освещение будет плавным и ровным.
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Ветряк из шагового двигателя
В качестве генератора на ветряк подойдет шаговый двигатель (ШД) для принтера. Даже при небольшой скорости вращения он вырабатывает мощность около 3 Вт. Напряжение может подниматься выше 12 В, что дает возможность заряжать небольшой аккумулятор.
к содержанию ↑Принципы использования
Характерная для российского климата турбулентность ветра в приземных слоях приводит к постоянным изменениям его направления и интенсивности. Ветрогенераторы больших размеров, мощность которых превышает 1 Квт будут инерционными. В результате они не успеют полностью раскрутиться при смене направления ветра. Этому также мешает момент инерции в плоскости вращения. Когда боковой ветер действует на работающий ветряк, он испытывает огромные нагрузки, которые могут привести к его быстрому выходу из строя.
Целесообразно применять ветрогенератор малой мощности, изготовленный своими руками, имеющий незначительную инерционность. С их помощью можно заряжать маломощные аккумуляторы мобильных телефонов или использовать для освещения дачи светодиодами.
В дальнейшем лучше ориентироваться на потребителей, нетребующих преобразования вырабатываемой энергии, например, для подогрева воды. Нескольких десятков ватт энергии вполне может хватить для поддерживания температуры горячей воды или для дополнительного подогрева системы отопления, чтобы она не перемерзала зимой.
к содержанию ↑Электрическая часть
Генератором в ветряк можно устанавливать шаговый двигатель (ШД) для принтера.

Даже при небольшой скорости вращения он вырабатывает мощность около 3 Вт. Напряжение может подниматься выше 12 В, что дает возможность заряжать небольшой аккумулятор. Остальные генераторы эффективно работают при скорости вращения более 1000 об./мин, но они не подойдут, поскольку ветряк вращается со скоростью 200-300 об./мин. Здесь необходим редуктор, но он создает дополнительное сопротивление и к тому же имеет высокую стоимость.
В генераторном режиме у шагового двигателя вырабатывается переменный ток, который легко преобразовать в постоянный, используя пару диодных мостов и конденсаторы. Схему легко собрать своими руками.

Установив за мостами стабилизатор, получим постоянное выходное напряжение. Для визуального контроля можно еще подключить светодиод. Чтобы уменьшить потери напряжения для его выпрямления применяются диоды Шоттки.
В дальнейшем можно будет создать ветряк с более мощным ШД. Такой ветрогенератор будет обладать большим моментом трогания. Проблему можно устранить, отключая нагрузку во время пуска и при малых оборотах.
к содержанию ↑Как сделать ветрогенератор
Лопасти можно изготовить своими руками из трубы ПВХ. Нужная кривизна подбирается, если взять ее с определенным диаметром. Заготовку лопасти рисуют на трубе, а затем вырезают отрезным диском. Размах винта составляет около 50 см, а ширина лопастей — 10 см. После следует выточить втулку с фланцем под размер вала ШД.

Она насаживается на вал двигателя и крепится дополнительно винтами, а к фланцам крепятся пластиковые лопасти. На фото изображено две лопасти, но можно сделать четыре, прикрутив еще две аналогичные под углом 90º. Для большей жесткости под головки винтов следует установить общую пластину. Она плотней прижмет лопасти к фланцу.
Изделия из пластика долго не служат. Продолжительный ветер со скоростью более 20 м/с такие лопасти не выдержат.
Далее нужно произвести балансировку. Это делается своими руками: от концов лопастей отрезаются кусочки пластика. Угол их наклона можно изменить посредством нагрева и изгиба.
Генератор вставляется в кусок трубы, к которому он крепится болтами.

К трубе с торца крепится флюгер, представляющий собой ажурную и легкую конструкцию из дюралюминия. Ветрогенератор держится на приваренной вертикальной оси, которая вставляется в трубу мачты с возможностью вращения. Под фланец можно установить упорный подшипник или полимерные шайбы, снижающие трение.
У большей части конструкций ветряк содержит выпрямитель, который крепится к подвижной части. Это делать нецелесообразно из-за увеличения инерционности. Электрическую плату вполне можно разместить внизу, а к ней вывести вниз провода от генератора. Обычно с шагового двигателя выходит до 6 проводов, соответствующих двум катушкам. Для них нужны токосъемные кольца для передачи электроэнергии от подвижной части. На них довольно сложно установить щетки. Механизм токосъема может оказаться сложней, чем сам ветрогенератор. Еще было бы лучше разместить ветряк так, чтобы вал генератора располагался вертикально. Тогда провода не будут заплетаться вокруг мачты. Такие ветрогенераторы сложней, но зато уменьшается инерционность. Коническая передача здесь будет в самый раз. При этом можно увеличить обороты вала генератора, подобрав необходимые шестерни своими руками.
Закрепив ветряк на высоте 5-8 м, можно начинать проводить испытания и собирать данные о его возможностях, чтобы в дальнейшем установить более совершенную конструкцию.
В настоящее время становятся популярными вертикально-осевые ветрогенераторы.

Некоторые конструкции хорошо выдерживают даже ураганы. Хорошо себя зарекомендовали комбинированные конструкции, работающие при любом ветре.
к содержанию ↑Заключение
Маломощный ветрогенератор надежно работает из-за малой инерционности. Его легко изготавливают в домашних условиях и используют преимущественно для подзарядки небольших аккумуляторов. Он может пригодиться в загородном доме, на даче, в походе, когда возникают проблемы с электричеством.
Оцените статью:
 Загрузка…
Загрузка…Поделитесь с друзьями:
Самодельный шаговый двигатель — Любительские системы ЧПУ
Уважаемые специалисты по ШД и схемам управления для них.
Помогите в реализации следующей задачи.
Есть некое мехустройство, в виде герметичного немагнитного тонкостенного цилиндрического корпуса, внутри которого вращается ротор диаметром 34 мм. Ротор содержит три пары полюсов постоянных магнитов. В реальном применении момент внутреннему ротору передаётся за счёт вращения внешнего ротора, содержащего расположенные по окружности постоянные магниты. Внешний ротор имеет лопатки и вращается за счёт потока жидкости. Возникла необходимость проверки вращения внутреннего ротора без использования насоса и внешних вращающихся частей. По виду конструкция ротора напоминает изображённую в классической литературе часть схемы двигателя с постоянными магнитами. Я добавил две пары обмоток и начал эксперименты, результатом которых явился разгон этого подобия шагового двигателя до 1200 об/мин. Но нужно было минимум 3000 тысячи. В рамки форума трудно втиснуть все пройденные этапы, укажу лишь, что сдвиг между фазами составлял 90 градусов, форма напряжения использовалась как прямоугольная, так и синусоидальная, статор представлял собой 4 сердечника из набора пластин, на котором располагались обмотки. Провод – медь, диаметром 0.5 мм. Кол-во витков варьировалось от 100 до 300 на каждом сердечнике. Напряжение привода меняли от 16 до 32 вольт. Меняли толщину набора, делая её как шире, так и уже ширины магнитов ротора. Основное отличие от схемы рис.3 — сердечники статора не имели замкнутого поля. Если эксперты сойдутся во мнении, что данная идея не имеет перспективы, я откажусь от дальнейших опытов, но был бы благодарен за любую информацию, которая поможет этой штуке работать. Всё широкие возможности ШД в данном случае не востребованы – не нужно торможения и жесткого позиционирования, пропуск шагов значения не имеет. Нужно плавно разогнать ротор от 0 до 3000-3500 оборотов и поддерживать вращение в течении 10 минут.
Если нужны детали опыта- мой e-mail [email protected]
С уважением, Борис
Шаговый двигатель своими руками, принцип работы, схема подключения
 Для работы любого электрического прибора, необходим специальный приводной механизм. Шаговый двигатель, является одним из таких устройств. Сегодня есть большой выбор разнообразных электродвигателей, разделяющихся по типу и по схеме драйвера, которым управляет контроллер.
Для работы любого электрического прибора, необходим специальный приводной механизм. Шаговый двигатель, является одним из таких устройств. Сегодня есть большой выбор разнообразных электродвигателей, разделяющихся по типу и по схеме драйвера, которым управляет контроллер.
Что такое шаговый двигатель?
Шаговый двигатель — это синхронное электромеханическое устройство, которое передает сигнал управления в механическое движения ротора. Вращение происходит шагами, которые фиксируются в определенном положении.
Принцип работы шагового двигателя
 При прикладывании напряжения к клеммам, щетки электродвигателя запускаются и начинают беспрерывно вращаться. Движок холостого хода обладает особым свойством, это превращение входящих импульсов прямоугольной направленности в заранее установленное положение приложенного ведущего вала.
При прикладывании напряжения к клеммам, щетки электродвигателя запускаются и начинают беспрерывно вращаться. Движок холостого хода обладает особым свойством, это превращение входящих импульсов прямоугольной направленности в заранее установленное положение приложенного ведущего вала.
Вал сдвигается под фиксированным углом с каждым импульсом. Если вокруг центрального куска железа зубчатой формы расположены несколько зубчатых электромагнитов, то устройства с таким редуктором достаточно эффективны. Микроконтроллер возбуждает электромагниты. Один зубчатый электромагнит под воздействием энергии притягивает зубья зубчатого колеса к своей поверхности, таким образом, вал двигателя делает поворот. Когда зубья выровнены по отношению к электромагниту, они немного смещаются к соседней магнитной детали.
Чтобы шестеренка начала вращение и выровнялась с предыдущим колесом, первый электромагнит отключается, а следующий включается. Затем весь процесс повторяется столько раз, сколько необходимо. Такое вращение называют постоянным шагом. Подсчитав количество шагов при полном обороте двигателя, определяется скорость его вращения.
Модели шаговых двигателей
 Шаговые двигатели по конструкции ротора делятся на три типа: реактивный, с постоянными магнитами и гибридный.
Шаговые двигатели по конструкции ротора делятся на три типа: реактивный, с постоянными магнитами и гибридный.
- В настоящее время синхронные реактивные двигатели применяются редко. Их используют, когда нужен небольшой момент и слишком большой угол поворота шага. Ротор изготовлен из магнитомягкого материала с отчетливыми полюсами, имеет большой угол шага, при отсутствии тока нет фиксирующего момента. Это самый простой и дешевый двигатель. Статор состоит из шести полюсов и трех фаз, а ротор имеет четыре полюса. При этом шаг устройства составляет 30 градусов. Вращающееся магнитное поле создается последовательным включением фаз статора. Ротор за один шаг поворачивается на угол меньше угла статора, так происходит из-за меньшего количества полюсов.
- Двигатель с постоянными магнитами состоит из ротора на постоянных магнитах и статора с двумя фазами. В отличие от реактивных устройств, у двигателей на постоянных магнитах после снятия управляющего сигнала ротор фиксируется. Так, происходит благодаря большим вращающим моментам. Так как процесс изготовления ротора сопровождается большими технологическими трудностями (большое число полюсов+постоянные магниты), получается большой угловой шаг до 90 градусов. Это является их единственным недостатком. При работе с однополярной схемой управления обмотки в центре могут быть с ответвлением. Обмотки без центрального ответвления питаются через двуполярную схему управления. Исходя из этого устройство шагового двигателя разделяется на два типа по виду обмоток, униполярные и биполярные.
Униполярный. Изменять расположение магнитных полюсов можно, не меняя при этом направленность тока. Достаточно включить отдельно каждую фазу обмотки. Устройство состоит из одной обмотки на фазу с расположенным в центре ответвлением.
Биполярный . У таких двигателей на фазу приходится одна обмотка, нет общего вывода, а есть два — на фазу. Благодаря этому биполярные устройства обладают наибольшей мощностью, чем униполярные. Для изменения магнитных полярностей полюсов, в обмотке изменяют направления тока.
Гибридный двигатель
Чтобы уменьшить угол шага, был разработан гибридный шаговый двигатель. В свою конструкцию, он включает лучшие свойства двигателя с постоянными магнитами и реактивного двигателя. Ротор представлен в виде намагниченного вдоль продольной оси цилиндрического магнита. Статор состоит из двух или четырех фаз, которые размещены между парами явно выраженных полюсов.
Как запустить шаговый двигатель, его управление
 Работа по подключению и управлению шагового двигателя будет зависеть от того, каким образом вы хотите запустить устройство и сколько проводов находится на приводе. Шаговые электродвигатели могут иметь от 4 до 8 проводов, поэтому для их подключения используют определенную схему.
Работа по подключению и управлению шагового двигателя будет зависеть от того, каким образом вы хотите запустить устройство и сколько проводов находится на приводе. Шаговые электродвигатели могут иметь от 4 до 8 проводов, поэтому для их подключения используют определенную схему.
- С четырьмя проводами. Каждая фазная обмотка имеет по два провода. Чтобы подсоединить драйвер пошагово, нужно найти парные провода с непрерывной связью между ними. Такой двигатель используется только с биполярным прибором.
- С пятью проводами. Центральные клеммы мотора внутри объединяются в сплошной кабель и выведены к одному проводу. Отделить обмотки друг от друга невозможно, так как появится много разрывов. Выйти из положения можно, если установить где находится центр провода и попытаться соединить его с другими проводниками. Это самый эффективный и безопасный режим. Затем устройство подключается и проверяется на работоспособность.
- С шестью проводами. Каждая обмотка имеет несколько проводов и центр-кран. Для разделения провода применяют измерительный прибор. Мотор можно подключать к однополярному и биполярному устройству. При подключении к однополярному устройству используются все провода. Для биполярного устройства один конец провода и один центральный кран каждой обмотки.
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
Как работает шаговый двигатель?
 Устройство может работать в трех режимах:
Устройство может работать в трех режимах:
- Микрошаговый режим. Устройства, работающие на микрошагововом режиме, являются новейшими разработками некоторых производителей и используются в основном в микроэлектронике или на промышленных конвейерах. Специальный чип создает такое напряжение, что вал становится в положение одной сотой шага, к примеру, на 1 оборот происходит 20 тыс. перемещений. Драйвер может создавать более 50 тысяч циклов управляющих напряжений на 1 оборот.
- Половинный режим. Благодаря тому, что в режиме половинного шага уровень вибраций сокращается, такие устройства часто используются в промышленности. После того как одна фаза активируется, она замирает в таком положении до тех пор, пока не включится следующая. Получается промежуточное положение и на зуб воздействуют одновременно два полюса. Когда первая фаза отключается, ротор продвигается вперед на полшага.
- Полный режим. Управляющее напряжение по очереди передается по всем фазам и получается полный шаг (на 1 оборот 200 перемещений).
Техническая характеристика шагового двигателя
В области электротехники и механики шаговый электродвигатель считается сложным устройством, которое включает в себя множество механических и электрических возможностей. На практике применяются следующие технические характеристики:
- Номинальный ток и напряжение. Максимально допустимый ток указан в механических параметрах электродвигателя. Номинальный ток, является главным электрическим параметром, при котором двигатель может работать сколько угодно времени. Номинальное напряжение указывают редко, его вычисляют по закону Ома. Оно показывает постоянное максимальное напряжение на обмотке двигателя, когда он находится в статическом режиме.
- Сопротивление фазы. Параметр показывает какое максимальное напряжение можно подавать на обмотку фазы.
- Индуктивность фазы. Насколько быстро будет увеличиваться ток в обмотке показывает этот параметр. Чтобы ток быстрее увеличивался при переключении фаз на высоких частотах, напряжение приходится делать больше.
- Число полных шагов за 1 оборот. Параметр показывает насколько электродвигатель точен, его плавность и допустимую способность.
- Вращающий момент. Механические данные показывают частоту вращения, которая зависит от момента вращения. Параметр указывает максимальное время вращения электродвигателя.
- Удерживающая фаза. Эта фаза показывает момент вращения при остановленном устройстве. Две фазы устройства должны быть запитаны номинальным током.
- Момент ступора. Во время отсутствия напряжения питания, он необходим для того, чтобы вал электродвигателя можно было провернуть.
- Время энерции ротора. Означает как быстро разгоняется двигатель. Чем показатель меньше, тем скорость разгона больше.
- Пробивное напряжение. Параметр относится к разделу электробезопасности и показывает наименьшее напряжение, пробивающее изоляцию между корпусом и обмотками устройства.