


Собственная частота и резонанс
ЛЕКЦИЯ № 9
МДК.01.01. Основы эксплуатации, технического обслуживания и ремонта судового энергетического оборудования
(Судовые двигатели внутреннего сгорания)
Тема: Понятие о динамике дизельного двигателя.
Учебные вопросы:
Вступление
1. Терминология по вибрации
2. Внешние неуравновешенные моменты
3. Момент от нормальной силы
4. Аксиальные (осевые) колебания
5. Крутильные колебания
Выводы, ответы на вопросы, задание на самостоятельную подготовку
СОДЕРЖАНИЕ ЛЕКЦИИ
Вступление
Описание характеристик вибрации двухтактных малооборотных дизелей, и конструктивных мер компенсации, которые применяются в связи с их использованием на судах в более полной мере раскрывает этот вопрос и для четырехтактных двигателей.
Терминология по вибрации
| Рис.1 Внутренние силы в крейцкопфном двигателе. |
Источники возмущения
Источник возмущения – это влияющее возмущение, которое производит и сохраняет колебания возмущения. Этот источник может быть свободным моментом, моментом направляющей силы, произведенный двигателем, влияющим на фундаментную раму двигателя и корпусные конструкции судна в результате аксиальных колебаний системы валопровода или влияния от крутильных колебаний системы валопровода.
Источники возбуждения в дизеле по своей природе являются циклическими, что означает их периодическое изменение в течение рабочего цикла двигателя, см. рис. 1.
Чтобы оценить влияние источника возмущения, выполняется так называемый анализ гармоник, при котором источник возмущения представляется суммой возмущений, действующих с различными частотами, кратными числу вращения частоты двигателя.
Математически, это выражается следующим образом:
F = F1 · cos (α + φ1) + F2 · cos (2α + φ2) + … Fn · cos (nα + φn)
где, α – угол поворота кривошипа
Первый член уравнения F1 · cos (α + φ1) называется силой первого порядка, потому что она действует один раз за один оборот коленчатого вала двигателя.
Второй член уравнения F2 · cos (2α + φ2) называется силой второго порядка, потому что она действует два раза за один оборот коленчатого вала двигателя.
Собственная частота и резонанс
Собственная частота – это частота характеристики, с которой твердый предмет свободно вибрирует при воздействии возмущения. Любая система из твердых элементов — струны скрипки, балок корпусного набора, валопровода или судна, имеет несколько собственных частот, каждая из которых некоторого вида колебаний как показано ниже.
Резонанс происходит в случаях, когда частота возмущения совпадает с собственной частотой элемента. При этом возникают вибрации очень высокого уровня.
Например:
Запланировано установить на судне двигатель 4L60MC.
Расчеты показывают, что предотвращения вибрации корпус должен иметь собственную частоту 3,83 герц. Это соответствует:
3,83 · 60 циклов/мин = 230 цикломинут
Таким образом, если двигатель 4L60MC эксплуатируется с частотой вращения 117 об/мин на MCR, то очевидно, что нет риска возникновения резонанса с моментом первого порядка, поскольку максимальная частота возбуждения двигателя
117 · 1 цикл/мин = 117 цикломинут
Момент второго порядка имеет частоту возбуждения
117 · 2 цикл/мин = 234 цикломинут
Это означает, что резонанс с моментом 2-го порядка может произойти при:
= 115 об/мин
отношение что равно 95 % нагрузки.
Поэтому в случае установки на судно двигателя 4L60MC, необходимо рассмотреть возможность наступления резонанса с моментом 2-ого порядка.
На рис. 2 показана линия отклонения корпуса для упомянутого вида колебаний.
Виды колебаний
Система может иметь несколько собственных частот, каждой из которых соответствует характерный вид колебаний. Например:
| Рис. 3. Виды колебаний. |
Как видно на рис. 3 верхний вид колебания имеет две точки, которые не двигаются, а нижний вид колебания три точки.
Эти точки называются «узлами», и соответственно количеству узлов колебаний названы “2-х узловая вибрация” и “3-х узловая вибрация”.
Также существуют другие формы колебаний. Например, существуют колебания в продольном направлении, крутящие колебания и их комбинация. Часто фраза “колебательная реакция” понимается как колебание системы в результате возмущения системы.
Демпфирование
Несмотря на то, что во всех системах существует трение, которое поглощает некоторое количество энергии, колебания все-таки достигают определенной величины. Эта величина будет зависеть от величины возмущения и демпфирования (трение) на частоте возмущенияотносительно собственной частоты системы.
| Рис. 3. Кривая колебания с и без демпфера. |
Определение величины демпфирования должна быть известна, чтобы компенсировать напряжения и колебания, может основываться на теоретических знаниях или опытных методах. На рис. 4 показано форма колебания с и без демпфирования.
Описание и примеры
Описание источников возмущения разделено на четыре секции, потому что характеристики вибрации двухтактных малооборотных дизельных двигателей обычно разделяют на четыре группы.
Для каждой группы дается основное пояснение природы возникновения источника возмущения, и описываются контрмеры противодействия для минимизации или устранения его последствий.
Все четыре группы источников возмущения системы показаны на рис. 5:
1 группа
2 группа. Моменты нормальной силы (рис. 5).
3 группа. Аксиальные (осевые) колебания.
4 группа. Крутящие колебания.
Во время рабочего цикла двигателя под воздействием силы газов действующих на кривошипно-шатунный механизм возникают силы инерции.
Силы инерции разделяют на силы инерции вращающихся масс и силы инерции поступательно-движущихся масс.
Силы инерции вращающихся масс постоянны по величине при постоянной частоте вращения двигателя, но переменны по направлению.
Силы инерции поступательно-движущихся масс зависят от фактического положения поршня даже при постоянной частоте вращения двигателя.
То же самое относится к силам газов: они не постоянны в течение всего рабочего цикла.
Для того чтобы составить математическое описание действия сил обычно выполняется гармонический анализ.
Этим силам противодействуют силы реакции в коленчатом валу, которые составляют Уравновешивающую их равнодействующую силу. Но при этом остаются внешние неуравновешенные моменты.
Читайте также:
Рекомендуемые страницы:
Поиск по сайту
Расчет собственных частот и форм колебаний конструкций в среде T-FLEX Анализ
Александр Сущих, Павел Ануфриков
Мы продолжаем знакомить читателя с новой разработкой АО «Топ Системы» — приложением для осуществления конечно-элементных расчетов T-FLEX Анализ.
В настоящей статье речь пойдет о модуле частотного анализа этой системы.
Необходимость в расчете собственных частот и соответствующих им форм колебаний нередко возникает при анализе динамического поведения конструкции под действием переменных нагрузок. Наиболее распространена ситуация, когда при проектировании требуется убедиться в малой вероятности возникновения в условиях эксплуатации такого механического явления, как резонанс. Как известно, суть резонанса заключается в значительном (в десятки раз и более) усилении амплитуд вынужденных колебаний на определенных частотах внешних воздействий — так называемых резонансных частотах (рис. 1). В большинстве случаев возникновение резонанса является крайне нежелательным в плане обеспечения надежности изделия явлением. Многократное увеличение амплитуд колебаний при резонансе и вызываемые этим высокие уровни напряжений — одна из основных причин выхода из строя изделий, эксплуатируемых в условиях вибрационных нагрузок. Для защиты от резонансных воздействий можно использовать различные механические устройства, которые принципиально меняют спектральные характеристики конструкции и поглощают энергию колебаний (например, виброизоляторы). Однако есть и другой эффективный способ противодействия резонансам. Известно, что резонансы наблюдаются на частотах, близких к частотам собственных колебаний конструкции. Если при проектировании изделия имеется возможность оценить спектр собственных частот конструкции, то можно со значительной долей вероятности прогнозировать риск возникновения резонансов в известном диапазоне частот внешних воздействий. Во избежание или для значительного уменьшения вероятности появления резонансов необходимо, чтобы б
Рассмотрим общий порядок выполнения расчета собственных частот в системе конечно-элементного моделирования T-FLEX Анализ.
Шаг 1. Создание объемной твердотельной модели изделия
Аналогично осуществлению статических расчетов (см. «САПР и графика» № 10’2004) для проведения частотного анализа необходимо иметь трехмерную модель изделия. Как мы уже отмечали, модель может быть построена пользователем в среде трехмерного моделирования T-FLEX CAD 3D или импортирована из другой системы объемного моделирования, поддерживающей для обмена данными о твердотельных моделях форматы STEP, IGES или Parasolid. Рассмотрим в качестве примера использование приложения T-FLEX Анализ для проверки надежности работы вала привода с угловой скоростью вращения до 900 об./мин (рис. 2). Для этого осуществим частотный анализ конструкции. Если собственные частоты вала не попадут в рабочий диапазон частот вращения, обеспечиваемый приводом, то можно быть уверенным в отсутствии резонансных явлений в работе механизма. Конструкция, на примере которой мы иллюстрируем работу с модулем частотного анализа, представляет собой сборочную трехмерную модель и состоит из нескольких отдельных твердотельных деталей. Для осуществления конечно-элементного анализа необходимо предварительно осуществить объединение всех деталей в одно тело с помощью команды T-FLEX CAD 3D «Булева операция/Сложение» (рис. 3).
Шаг 2. Создание «Задачи»
После того как трехмерная модель изделия была создана или импортирована в систему T-FLEX CAD 3D, можно приступать непосредственно к конечно-элементному моделированию. Любой расчет в T-FLEX Анализе начинается с создания «Задачи» с помощью команды «Новая задача» меню «Анализ» T-FLEX CAD (рис. 4). При создании задачи определим ее тип: «Частотный анализ».
Шаг 3. Задание материала
По умолчанию в расчете используются характеристики материала «С операции». В стандартной версии T-FLEX CAD 3D поставляется библиотека конструкционных материалов, которые могут быть назначены операциям твердотельного моделирования, причем пользователь может пополнять стандартную базу материалов другими материалами. Кроме того, в составе системы T-FLEX Анализ есть собственная независимая база материалов, которую также можно использовать для задания физико-механических свойств анализируемого изделия. Выберем для нашей конструкции материал «Сталь» из стандартной библиотеки материалов T-FLEX CAD 3D (рис. 5).
Шаг 4. Генерация конечно-элементной сетки
Как говорилось в нашей предыдущей статье, посвященной системе T-FLEX Анализ, для осуществления конечно-элементного моделирования необходимо построение расчетной сетки из тетраэдральных элементов. Команда построения такой сетки (которая так и называется — «Сетка») инициируется автоматически при создании «Задачи» или может быть вызвана пользователем из меню «Анализ» T-FLEX CAD. При создании сетки пользователь определяет степень дискретизации твердотельной модели, указывая в параметрах ориентировочный размер конечных элементов (тетраэдров), при помощи которых будет описана математическая модель моделируемого изделия. Здесь необходимо отметить следующие моменты. Конечно-элементная сетка может существенным образом влиять на качество получаемых решений в случае сложной пространственной конфигурации изделий. Как правило, более мелкое разбиение обеспечивает лучшие по точности результаты. Однако аппроксимация модели большим количеством малых тетраэдров приводит к системе алгебраических уравнений большого порядка, что может негативно сказаться на скорости выполнения расчета. Вообще, оценить качество конечно-элементной модели можно последовательным решением нескольких задач с различными возрастающими степенями дискретизации. Если результаты решения (собственные частоты) перестают заметно меняться при использовании более густой сетки, то можно со значительной долей уверенности считать, что достигнут определенный оптимальный уровень дискретизации и что дальнейшее увеличение дискретизации сетки нерационально.
Создадим конечно-элементную сетку для нашей конструкции (рис. 6).
Шаг 5. Наложение граничных условий. Задание закреплений
Для успешного решения физической задачи в конечно-элементной постановке помимо создания конечно-элементной сетки необходимо корректно определить так называемые граничные условия. В частотном анализе их роль выполняют закрепления. Этап задания граничных условий — очень ответственный и требующий хорошего понимания расчетчиком сути решаемой задачи. Поэтому, прежде чем приступить к наложению граничных условий, следует хорошо продумать физическую сторону задачи. Для задания закреплений в T-FLEX Анализ предусмотрены две команды: «Полное закрепление» и «Частичное закрепление». Команда «Полное закрепление» применяется к вершинам, граням и ребрам модели и определяет, что данный элемент трехмерного тела полностью неподвижен, то есть сохраняет свое первоначальное расположение и не меняет своего положения под действием приложенных к системе нагрузок. Команда «Частичное закрепление» обладает более широкими возможностями: с ее помощью можно ограничить перемещение тела в определенных координатных направлениях или определить заданное положение элементов модели.
Зададим условия закрепления для нашей конструкции. Используя команду «Частичное закрепление», для опорных шеек вала зададим ограничение (нулевые перемещения) по осям Y и Z глобальной системы координат. Кроме того, с помощью той же команды исключим возможность продольного перемещения вала, наложив соответствующее ограничение на торцовую грань (рис. 7). После задания закреплений мы получим готовую для расчета конечно-элементную модель.
Шаг 6. Выполнение расчета
После создания конечно-элементной сетки и наложения граничных условий можно инициировать команду «Расчет» и запустить процесс формирования систем линейных алгебраических уравнений (СЛАУ) и их решения (рис. 8). В свойствах процессора пользователь может определить такие дополнительные свойства, как точность вычислений или количество нижних собственных частот конструкции, подлежащих определению. Известно, что почти вся энергия механических колебаний аккумулируется на нескольких нижних гармониках изделия, поэтому при частотном анализе в первую очередь представляют интерес первые три-пять наименьших собственных частот.
Шаг 7. Анализ результатов расчета
Результатами частотного анализа являются собственные частоты изделия и соответствующие им собственные формы колебаний. Формы колебаний представляют собой относительные амплитуды перемещений конструкции в узлах конечно-элементной сетки. По ним можно определить характер движения, осуществляемого системой на частоте колебаний, соответствующей собственной. Анализ результатов осуществляется в модуле постпроцессора системы T-FLEX Анализ. Постпроцессор полностью интегрирован в среду геометрического моделирования T-FLEX CAD 3D и обладает полным набором удобных инструментов по обработке результатов моделирования (анимацией, динамическим зондированием результатов, гибкой настройкой шкалы и т.п. — см. «САПР и графика № 10’2004).
Проанализируем полученные нами результаты. Первые две формы свободных колебаний нашей конструкции соответствуют изгибным колебаниям вала с частотами, превышающими 135 Гц (рис. 9), что, в свою очередь, соответствует угловой скорости вращения, в девять раз превышающей максимальную рабочую для данного привода. Таким образом, согласно проведенному расчету в рабочем диапазоне частот вращения резонансы данному валу не угрожают.
Для лучшего понимания характера динамических процессов целесообразно использовать специальный инструмент анимации результата, который позволяет увидеть и оценить характер движения в реальном масштабе времени.
Помимо интерактивного изучения результатов в постпроцессоре T-FLEX Анализ есть возможность создать независимый электронный документ в html-формате, с эпюрами результатов и сведениями о конечно-элементной модели (рис. 10). Этот электронный документ может быть передан в стороннюю организацию или сохранен для последующего изучения результатов.
Таким образом, система конечно-элементного моделирования T-FLEX Анализ позволяет пользователям популярной российской системы T-FLEX Parametric CAD (www.topsystems.ru) осуществлять расчет собственных частот и форм колебаний конструкций. Применяя этот инструмент, пользователи T-FLEX CAD 3D и T-FLEX Анализ получают возможность значительно улучшить качество разрабатываемых ими изделий.
«САПР и графика» 11’2004
Резонанс Гельмгольца — Википедия
Материал из Википедии — свободной энциклопедии

Резонанс Гельмгольца — явление резонанса воздуха в полости, примером которого является гудение пустой бутылки от потока воздуха направленного перпендикулярно её горлышку. Резонатор Гельмгольца — медный сосуд сферической формы с открытой горловиной, изобретённый Гельмгольцем около 1850 года для анализа акустических сигналов, на основе наблюдаемых в нём явлений Гельмгольцем и Рэлеем разработана количественная теория резонанса данного типа[1].
Когда воздух нагнетается в полость, давление в полости возрастает. Когда внешняя сила, нагнетающая воздух в полость, исчезает, повышенное давление заставляет воздух вытекать обратно. Через некоторое время давление внутри и снаружи сравняется, но воздух всё равно продолжит выходить вовне, поскольку струя воздуха в горлышке обладает массой и ненулевой скоростью, а значит, и кинетической энергией. Через некоторое время воздух перестанет выходить из полости, и при этом давление внутри полости будет меньше давления снаружи. Воздух снова устремится в полость. Этот цикл будет повторяться множество раз, с затухающей амплитудой. Частота цикла (собственная, или резонансная частота) зависит от формы полости. Если внешняя сила будет возникать и исчезать с частотой, равной собственной частоте полости, возникнет резонанс — колебания воздуха не будут затухать.
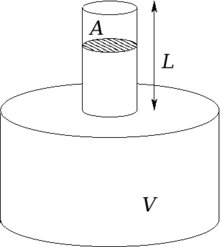 Модель резонатора Гельмгольца
Модель резонатора ГельмгольцаМожет быть показано[2] что собственная угловая частота колебаний равна
- ωH=γA2mP0V0,{\displaystyle \omega _{\text{H}}={\sqrt {\gamma {\frac {A^{2}}{m}}{\frac {P_{0}}{V_{0}}}}},}
где γ{\displaystyle \gamma } — показатель адиабаты, значение которого обычно равно 1,4 для воздуха и двуатомных газов; A{\displaystyle A} — площадь сечения горлышка; m{\displaystyle m} — масса воздуха в горлышке; P0{\displaystyle P_{0}} — статическое давление в полости; V0{\displaystyle V_{0}} — статический объём полости.
Для цилиндрических горлышек
- A=VnL,{\displaystyle A={\frac {V_{n}}{L}},}
где: L{\displaystyle L} — длина горлышка, Vn{\displaystyle V_{n}} — объём воздуха в горлышке, поэтому
- ωH=γAmVnLP0V0.{\displaystyle \omega _{\text{H}}={\sqrt {\gamma {\frac {A}{m}}{\frac {V_{n}}{L}}{\frac {P_{0}}{V_{0}}}}}.}
По определению плотности:
- Vnm=1ρ,{\displaystyle {\frac {V_{n}}{m}}={\frac {1}{\rho }},}
поэтому
- ωH=γP0ρAV0L,{\displaystyle \omega _{\text{H}}={\sqrt {\gamma {\frac {P_{0}}{\rho }}{\frac {A}{V_{0}L}}}},}
и
- fH=ωh3π,{\displaystyle f_{\text{H}}={\frac {\omega _{H}}{2\pi }},}
где fH{\displaystyle f_{H}} — резонансная частота.
Скорость звука в газах равна
- v=γP0ρ,{\displaystyle v={\sqrt {\gamma {\frac {P_{0}}{\rho }}}},}
поэтому можно выразить резонансную частоту через неё:
- fH=v2πAV0L.{\displaystyle f_{\text{H}}={\frac {v}{2\pi }}{\sqrt {\frac {A}{V_{0}L}}}.}
Длина горлышка появляется в знаменателе потому, что инерция воздуха в горлышке пропорциональна массе воздуха в горлышке, а значит, и длине. Объём появляется в знаменателе потому, что коэффициент сжимаемости воздуха в полости обратно пропорционален объёму. Площадь сечения горлышка влияет двояко — чем больше площадь, тем больше масса воздуха в горлышке, и тем меньше скорость, с которой воздух устремляется внутрь и вовне.
Эта формула имеет границы применимости, зависящие от формы горлышка и толщины стенок резонатора. Исходя из примерно такой же физической модели можно получить более точную формулу[3]. Кроме этого, если скорость потока рядом с резонатором высока (более 0,3 числа Маха), необходимо вводить дополнительные поправки.
Резонанс Гельмгольца применяется в двигателях внутреннего сгорания и в акустических системах. Системы впрыска топлива, называемые системами Гельмгольца, использовались в двигателях Chrysler V10, которыми комплектовались автомобили Dodge Viper и пикапы Ram, а также в мотоциклах Buell. В струнных инструментах с полой декой, таких, как гитара или скрипка, один из пиков кривой резонанса — это резонанс Гельмгольца (остальные — это резонансные частоты деревянных частей инструмента). Окарина — резонатор с изменяемым сечением горлышка. Западноафриканский барабан джембе имеет относительно узкое горлышко, что придаёт ему глубокий басовый тон.
Теория резонанса Гельмгольца используется при проектировании выхлопных труб автомобилей и мотоциклов, с целью сделать звук двигателя более тихим или более красивым.
- Hermann von Helmholtz. On the sensations of tone as a physiological basis for the theory of music / Alexander John Ellis. — Longmans, Green, 1885. — 576 с.
- Колебания и волны. Лекции. В. А. Алешкевич, Л. Г. Деденко, В. А. Караваев (Физический факультет МГУ) Издательство Физического факультета МГУ, 2001 г.
Резонансный метод определения частоты | Статья в журнале «Молодой ученый»
Описан резонансный метод измерения частоты, выявлены источники погрешности, рассмотрены различные типы частотомеров.
Ключевые слова: частота, резонанс, частотомер, нестабильность частоты, четвертьволновый трансформатор
Спектр частот электромагнитных колебаний, используемых в радиотехнике, простирается от долей герца до тысяч гигагерц. Этот спектр вначале разделяют на два диапазона — низких и высоких частот. К низким частотам относят и нфра звуковые (ниже 20 Гц), звуковые (20— 20 000 Гц) и ультразвуковые (20–200 кГц). Высокочастотный диапазон, в свою очередь, разделяют на высокие частоты (20 кГц — 30 МГц), ультравысокие (30–300 МГц) и сверхвысокие (выше 300 МГц). Верхняя граница сверхвысоких частот непрерывно повышается и в настоящее время достигла 80 ГГц (без учета оптического диапазона). Такое разделение объясняется разными способами получения электрических колебаний и различием их физических свойств, а также особенностями распространения на расстояние. Однако четкой границы между отдельными участками спектра провести невозможно, поэтому такое деление в большой степени условно.
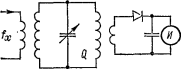
Рис. 4. Схема резонансного частотомера
Источник напряжения измеряемой частоты fx с помощью элемента связи ЭСв соединяется с прецизионным измерительным контуром ИК, который настраивается в резонанс с частотой fxМомент резонанса фиксируется по максимальному показанию индикатора, присоединенного к контуру через второй элемент связи. Измеряемая частота определяется по градуированной шкале микрометрического механизма настройки с большим числом отсчетных точек. Контур и индикатор конструктивно объединены в устройство, называемое резонансным частотомером.
Схема резонансного частотомера (рис. 4) позволяет выявить источники погрешности измерения. Погрешность градуировки определяется качеством механизма настройки;
ее можно уменьшить путем предварительной градуировки шкалы частотомера с помощью образцовой меры. Нестабильность частоты измерительного контура возникает вследствие изменения его геометрических размеров под влиянием изменения температуры окружающей среды; ее можно вычислить по следующей формуле:
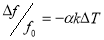
где f — отклонение частоты от резонансной под влиянием изменения температуры на T, К; — линейный температурный коэффициент расширения материала контура;k — конструктивный коэффициент. Нестабильность настройки контура возникает также при изменении вносимых реактивных сопротивлений со стороны источника fx и индикатора. Активные вносимые сопротивления уменьшают добротность контура.
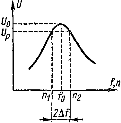
Рис. 5. резонансная кривая колебательного контура
Уменьшение влияния вносимых сопротивлений достигается ослаблением связи с источником fx и индикатором.
Неточность фиксации резонанса определяется значением добротности контура Q нагруженного измерительного контура и разрешающей способностью индикатора. Из уравнения резонансной кривой (рис. 5) можно получить формулу для расчета относительной погрешности от неточности фиксации резонанса:
 (3)
(3)
где U0 — показание индикатора при резонансе; Up — показание при расстройке измерительного контура на f.
f.
Измерительный контур резонансного частотомера в зависимости от диапазона частот, для которого он предназначен, выполняется с сосредоточенными или распределенными параметрами. Резонансные частотомеры с сосредоточенными параметрами в настоящее время полностью вытеснены цифровыми частотомерами, а с распределенными параметрами широко применяются в диапазоне СВЧ.
Резонансные частотомеры характеризуются диапазоном измерения частот, погрешностью и чувствительностью, т. е. минимальной мощностью, поглощаемой от источника измеряемой частоты, необходимой для уверенного отсчета показаний индикатора при резонансе.
Резонансные частотомеры с распределенными параметрами. Колебательный контур частотомера выполняют либо в виде отрезка коаксиальной линии, либо в виде объемного резонатора. Настройка коаксиальной линии производится изменением ее длины, объемного резонатора — изменением его объема.
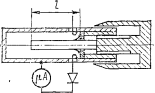
Рис. 6. Четвертьволновый резонансный частотомер

Рис. 7. Резонансный частотомер с нагруженной линией
Частотомеры с распределенными параметрами связывают с источниками измеряемой частоты через штыревую или рупорную антенну или через элементы связи в виде петель; зондов, щелей и круглых отверстий. На входе частотомера часто включают аттенюаторы с переменным ослаблением для регулировки входной мощности. Иногда применяют направленные ответвители.
Индикатор частотомера состоит из полупроводникового (германиевого или кремниевого) диода и магнитоэлектрического микроамперметра большой чувствительности. Связь диода с измерительным контуром осуществляется через петлю связи, располагаемую внутри коаксиальной линии или объемного резонатора. Если частотомер предназначен для использования при импульсной модуляции, то видеоимпульсы, получившиеся после детектирования диодом, поступают на транзисторный усилитель и амплитудный вольтметр. Параллельно последнему можно включить осциллограф.
Коаксиальные частотомеры выполняют в основном двух типов: четвертьволновые и с нагруженной линией.
Четвертьволновый резонансный частотомер представляет собой разомкнутый отрезок коаксиальной линии (рис. 6). Настройка его осуществляется с помощью микрометрического механизма со шкалой, градуированной в единицах длины I. Резонанс, в линии наступает при I, равной нечетному числу четвертей длины волны.

где п = 0, 1, 2…
Отсчеты l1 и l2 соответствуют /4 и 3/4, поэтому их разность равна половине длины волны. В общем случае

Четвертьволновые частотомеры применяются на частотах 600 МГц—10 ГГц. Погрешность измерения лежит в пределах 10–3-5*10–4.
Резонансный частотомер с нагруженной линией отличается от четвертьволнового тем, что разомкнутая коаксиальная линия нагружается емкостью С, образуемой торцами внутреннего и наружного проводников (рис. 7). Резонанс в нагруженной линии наступает при выполнении условия

где D — внутренний диаметр внешнего проводника; d— внешний диаметр внутреннего проводника: ρ — волновое сопротивление линии.
При настройке такого частотомера одновременно изменяются и длина линии l, и емкость С. Перекрытие, по сравнению с четвертьволновым частотомером, возрастает в 2— 3 раза. Двумя частотомерами с нагруженной линией перекрывается диапазон частот от 150 до 1500 МГц. Измеряемую частоту определяют с помощью градуировочных таблиц или графиков. Погрешность измерения 5–10~3.
Резонансный частотомер с объемнымрезонатором настраивается передвижением подвижного поршня (плунжера). Возбуждаемые внутри полости резонатора стоячие волны бывают различных типов. Это зависит от способа введения возбуждающего электромагнитного поля. При возбуждении цилиндрического резонатора через отверстие в центре торцевой стенки (рис. 8, а) возникают колебания типа H111. Из электродинамики известно, что собственная длина волны, в резонаторе связана с его диаметром а и высотой I следующей зависимостью:
(L/l)2 + l,37(l/d)2 =(2/λ111)2
Если положить l= d, тоλ111 =1,3 d.
При возбуждении полости резонатора через отверстие в ее боковой стенке возникают колебания типа H011 (рис. 8, б). Поле этих волн характерно отсутствием токов проводимости между торцевой и цилиндрической стенками резонатора, что позволяет применить для настройки бесконтактный плунжер. Проникающая при этом в нерабочее пространство за поршнем энергия поглощается предусмотренным
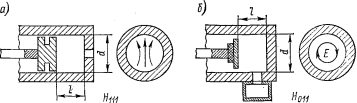
Рис. 8. Схемы частотомеров с объемными резонаторами
Литература:
- Данилин А. А. Измерения в технике СВЧ: Учеб. пособие для вузов.- М.: Ра- диотехника, 2008.-184с
- Дворяшин Б. В. Метрология и радиоизмерения / Учеб. Пособие для студентов ВУЗов, -М:, Издательский центр «Академия», 2005. — 304с
- Метрология и радиоизмерения / Учебник для ВУЗов. /Под ред. В. И. Нефедова, -М:, Высшая школа, 2003.
- Винокуров В. И., Каплин С. И., Петелин И. Г. Электрорадиоизмере- ния. — М.: Высш. шк., 1986.
- Измерения в электронике. Справочник /Под ред. В. А. Кузнецова. — М.: Энергоатомиздат, 1987.-512 с.
- Методические указания к выполнению лабораторных работ по дисциплине “Измерения на СВЧ”.А. А. Данилин, В. Н. Малышев, М. Л. Тылевич. -ЛЭТИ.- Л.:1990.- 28с.
Методическое пособие по определению частот собственных колебаний узлов и деталей » Все о транспорте газа

В настоящем методическом пособии приведены сведения о частотах и формах колебаний деталей, а также наиболее распространённые методы экспериментального определения частот собственных колебаний (ЧСК) деталей и конструкций. Пособие не ставит своей целью изложить всё многообразие методов и средств, применяемых при исследовании механических частотных характеристик. При составлении методики предполагалось предварительное знание работниками основных сведений по теории колебаний и правил проведения измерений с помощью стандартных измерительных средств.
1. Основные сведения о частотных характеристиках (ЧСК) деталей.
Каждая деталь имеет бесконечное количество ЧСК, образующих спектр. Каждой частоте собственных колебаний соответствует своя форма колебаний. Форма колебаний определяется картиной знакопеременных смещений или прогибов и положением узловых линий. В узловых линиях перемещения бесконечно малы и считаются нулевыми. По разные стороны узловых линий смещения колеблющихся участков находятся в противофазе. Совокупность форм колебаний детали образуют спектр форм. Способ крепления детали изменяет спектр частот и форм колебаний. Существуют методы расчёта частот и форм собственных колебаний деталей.
Расчётная формула для определения частот изгибных колебаний балок имеет следующий вид:
f = α2/2π l2 *√EI/m,
где l – длина балки, EI – жёсткость балки на изгиб, m — погонная масса балки,
α — расчётный коэффициент.
Ниже (рис. 1-3) приведены формы изгибных колебаний балки при различных способах крепления. Значения ЧСК одной и той же балки при различных способах крепления и различных формах зависят только от α2. Значения α2 приведены на рисунках. По ним нетрудно видеть, как изменятся собственные частоты, в зависимости от способа крепления и формы колебаний.

α2 = 3,515 α2 = 22,037 α2 = 61,68 α2 = 120,907 α2 = 199,85
Консольная балка.
Рис.1

α2 = 9,869 α2 =39,478 α2 = 88,826 α2 = 157, 91 α2 = 246,738
Балка с опертыми концами.
Рис.2

α2 = 22,37 α2 = 61,67 α2 = 120,912 α2 = 199,855 α2 = 298,55
Свободная балка.
Рис.3
В таблице 1 представлен спектр рисунков узловых линий эталонной пластинки при изгибных формах колебаний, а в таблице 2 аналогичный спектр осесимметричного диска.
Значения ЧСК соответствующим формам возрастают в рядах, как по горизонтали, так и по вертикали. В таблицах значения m и n определяют число узловых линий проходящих через оси симметрии.
Направления прогибов, представленных в таблице 1, перпендикулярны плоскости пластины. Наряду с этим имеются формы колебаний, у которых направления прогибов лежат в плоскости пластин. Однако в этом случае собственные частоты из-за высокой жёсткости настолько велики, что они не имеют практической значимости.
Таблица 1.

Таблица 2.

Представленные выше формы колебаний характерны для плоских деталей. Реальные детали, как правило, имеют более сложную геометрию. Поэтому и формы колебаний у реальных деталей более сложны.
Знание ЧСК позволяет конструкторам избежать условий работы конструкции на длительных эксплутационных режимах при частотах, близких резонансным. Изменение спектра ЧСК конструкции может служить в качестве признака появления и развития дефекта. При исследовании разрабатываемых деталей газотурбинной техники иногда используются методы определения форм колебаний с помощью голографической интерферометрии, которые позволяют выявлять сложные формы колебаний в широком диапазоне частот. В данном пособии этот метод не рассматривается, так как он не применяется в практике производства и ремонта.
В практике ремонтных предприятий используется контроль ЧСК лопаток газотурбинных двигателей (ГТД) с целью проверки их соответствия техническим условиям. При ремонте турбин чаще всего контролируется первая форма колебаний. При производстве иногда контролируются частоты и формы в более широком диапазоне
2. Методы и средства измерения ЧСК.
2.1 Метод измерения ЧСК с использованием вибровозбудителя колебаний переменной частоты.
Метод поясняется с помощью блок-схемы, приведенной ниже на рис.4.
С генератора 1 напряжение переменной частоты подаётся на вибровозбудитель 2 (при необходимости использования вибровозбудителя большой мощности используется усилитель мощности 3). Возбуждаемые колебания детали 4 воспринимаются пьезодатчиком (или щупом с датчиком) 5. Сигнал с датчика поступает на вход «У» осциллографа 6. На вход «Х» осциллографа через нормирующий делитель 7 подаётся напряжение с генератора.
При наличии сигнала с датчика с частотой возбуждения на экране осциллографа будет регистрироваться эллипс. Если частота возбуждения, регистрируемая датчиком, будет отлична от частоты генератора, то на экране будет регистрироваться фигура, отличная от эллипса. Плавным изменением частоты генератора находится резонансная частота по максимальному значению сигнала, поступающего с датчика на вход «У». По шкале частоты генератора фиксируется значение резонансной частоты, соответствующее собственной частоте. С помощью данного метода можно определить резонансные частоты в широком диапазоне частот.

Блок-схема измерения ЧСК с использованием вибровозбудителя колебаний переменной частоты.
1 – генератор переменной частоты, 2 – вибровозбудитель, 3 – усилитель мощности, 4 – деталь, 5 – пьезодатчик, 6 – осциллограф, 7 – делитель.
Рис.4.
Схема рис.4 используется также для определения форм колебаний. Для этого фиксируется положение вибровозбудителя, а щуп перемещается по детали. На узловой линии амплитуда сигнала с датчика, поступающего на вход «У», будет падать до 0, а при её пересечении фаза изменится на 180°. Изменение фазы контролируется по наклону эллипса на экране осциллографа. Сканируя щупом поверхность детали, можно нарисовать картину узловых линий. При консольном защемлении детали и возбуждении на низшей частоте узловая линия находится в заделке и смена фазы при сканировании поверхности детали не происходит. Следует отметить, что если для данной формы колебаний возбуждение будет осуществляться через узел колебаний, то колебания не будут возбуждаться и эта форма останется незамеченной.
Аналогичным образом можно определять картину узловых линий, если закрепить пьезодатчик и сканировать вибровозбудителем поверхность детали. Однако если присоединённая масса вибровозбудителя будет соизмерима с массой детали, то картина будет искажена.
2.2 Метод измерения ЧСК с использованием ударного возбуждения.
Схема реализации этого метода приведена ниже на рис.5.
По данной схеме возбуждение детали 1 осуществляется молотком 2 с мягким наконечником. Колебания регистрируются с помощью акселерометра 3, подключённому на вход виброанализатора 4.

Схема измерения ЧСК с использованием ударного возбуждения.
1 – деталь, 2 – молоток с мягким наконечником, 3 – акселерометр,
4 – виброанализатор типа «Агат», «Кварц».
Рис.5.
Современные анализаторы имеют функцию измерения ЧСК ударным методом. Из отечественных приборов такого класса наибольшее распространение получили виброанализаторы типа «Агат», «Кварц» фирмы «Диамех», в которых реализуется такая функция. Порядок работы с помощью данной функции приведён в техническом описании используемого анализатора. Такой метод эффективен и при определении резонансных свойств опорных конструкций агрегатов. Снятие ЧСК с помощью акселерометра и анализатора при ударном возбуждении лучше производить в режиме измерения ускорения, а не скорости и смещения. В режиме измерения скорости и смещения осуществляется одно или двукратное интегрирование. Затухающий процесс имеет широкий частотный спектр, который может выйти за область интегрирования. Это может привести к недостоверным результатам.
3. Устройства для зажима рабочих лопаток ГТД при контроле ЧСК в технологической оснастке.
3.1 Требования к устройствам для зажима лопаток.
Точность измерительных средств, как правило, на два порядка выше, чем требуемая точность измерения ЧСК. Поэтому достоверность результатов контроля преимущественно определяется способом и устройствами для закрепления лопаток. Для достоверности было бы правильнее контролировать частоты при реальном защемлении в роторе. Но контроль ЧСК рабочих лопаток турбины после установки в диск выполнить нельзя, ввиду наличия качки в замках. Их защемление в замках обеспечивается при работе под действием центробежных сил. Контроль ЧСК рабочих лопаток компрессора хотя и производится в составе ротора, но всё равно приходится проводить контроль частот лопаток до их установки, так как установка лопаток с исходно несоответствующими ТУ частотами может привести к неоправданным затратам.
Поэтому возникает необходимость проводить контроль ЧСК рабочих лопаток турбины и компрессора ГТД с применением технологической оснастки. Для этого необходимо выбрать такую оснастку, чтобы её применение не привело к изменению частотного спектра. При этом должна обеспечиваться стабильность показаний при многократных измерениях. Это возможно, если будут обеспечены достаточная жёсткость зажимных элементов, равномерное защемление замков лопаток, достаточность и стабильность усилия зажима. Масса самого приспособления должна быть, по крайней мере, на порядок больше массы контролируемой лопатки.
Следует также отметить, что в некоторых случаях имеет значение степень демпфирования колебаний. С этой точки зрения количество сопрягаемых элементов приспособления должно быть минимизировано. При использовании гидравлических приспособлений зазоры между поршнем и цилиндром должны быть максимально допустимыми, для исключения демпфирования при контакте. Размеры замков должны быть такими, чтобы обеспечивался минимальный ход поршня при защемлении лопатки. Минимум объёма масла под поршнем обеспечивает минимум демпфирования колебаний.
Исходя из этих принципов, разрабатываются технологические устройства для контроля ЧСК лопаток.
3.2 Конструкция и принцип работы оснастки, используемой при контроле ЧСК рабочих лопаток ГТД.
Зажимные элементы для хвостовиков лопаток, как правило, изготавливаются индивидуально под каждую ступень. Наряду с этим в практике используется универсальное замковое устройство (патент RU 2189023 C2), которое обеспечивает стабильность защемления хвостовиков лопаток всех типов. Зажимные элементы этого замкового устройства самоустанавливаются по плоскости защемляемых поверхностей лопатки за счёт поворота прижимных элементов, выполненных в виде отрезков цилиндров.
Ниже на рис. 6 приведена схема приспособления, которое используется для контроля ЧСК лопаток ГТД. В нём лопатка 1 устанавливается между зажимными элементами 2, которые помещаются в гидравлическое приспособление 3. Шток с поршнем 3.1 при подаче на него давления масла защемляет зажимными элементами лопатку. При сбросе давления масла пружина 3.2 возвращает поршень в исходное положение. Рабочее давление масла создаётся с помощью пресса 4. Вентиль 4.1 пресса служит для подачи масла в пресс. Вентиль 4.2 перекрывает или открывает магистраль между прессом и гидравлическим

приспособлением. Давление регулируется рукояткой 4.3 поршня пресса. Контроль давления осуществляется с помощью манометра 4.4.
Схема приспособления для зажима рабочих лопаток ГТД при контроле ЧСК.
Рис.6
Для зажима лопатки в приспособлении необходимо:
— установить лопатку 1 между зажимными элементами 2 гидравлического приспособления 3;
— закрыть вентиль 4.1 пресса 4;
— открыть вентиль 4.2 пресса;
— подать рабочее давление в цилиндр гидравлического приспособления с помощью рукоятки 4.3 поршня пресса;
— контроль давления осуществлять с помощью манометра 4.4,
— закрыть вентиль 4.2 пресса.
Для раскрепления лопатки и приведения приспособления в исходное состояние необходимо:
— открыть вентили 4.1 и 4.2 пресса;
— вынуть лопатку 1 из приспособления;
— установить поршень 4.3 пресса в крайнее левое положение.
4. Меры безопасности при производстве работ.
1.1 Работы по определению ЧСК являются составной частью работ по дефектоскопии деталей и узлов ГПА, поэтому при проведении работ следует руководствоваться «Инструкцией по охране труда при проведении работ по дефектоскопии ГПА».
1.2 К работе допускаются лица, изучившие правила эксплуатации приборов используемых при работе.
5. Подготовительные работы.
5.1. Проверить, чтобы детали и узлы, подлежащие контролю, были очищены от грязи, пыли и имели сопроводительную документацию установленного образца.
5.2. Подготовить рабочее место таким образом, чтобы не было мешающих факторов и обеспечивался безопасный доступ к рабочей зоне.
5.3. Подготовить бланки протоколов для проверяемых узлов или деталей.
5.4. Собрать измерительную схему согласно техническому описанию.
5.5. Включить измерительный прибор.
6. Производство работ.
6.1. Измерение частот собственных колебаний лопаток ГТД в составе ротора с использованием ударного возбуждения.
6.1.1 Установить на приборе необходимый режим для проведения измерений с помощью ударного возбуждения согласно инструкции по эксплуатации.
6.1.2 Установить на приборе диапазон измерения частот, в котором лежат ЧСК лопаток данной ступени.
6.1.3 Установить акселерометр используемого измерительного прибора на ротор вблизи лопатки, у которой измеряется собственная частота.
6.1.4 Переключить прибор на режим ожидания удара.
6.1.5 Нанести молотком с резиновым наконечником лёгкий удар по лопатке.
6.1.6 Произвести отсчёт измеренной частоты прибором и записать в протокол.
6.1.7 Последовательно произвести измерения ЧСК всех лопаток данной ступени, повторяя операции п.п. 6.1.3 – 6.1.6.
6.1.8 При необходимости произвести измерения ЧСК лопаток других ступеней повторить операции п.п. 6.1.2 – 6.1.7.
6.2. Измерение частот собственных колебаний рабочих лопаток ГТД при закреплении в технологическом приспособлении (см. рис.6).
6.2.1 Подготовить приспособление, используя рекомендации п.3.2, к работе.
6.2.2 Установить на приборе необходимый режим для проведения измерений с помощью ударного возбуждения.
6.2.3 Установить на приборе диапазон измерения частот, в котором лежат ЧСК лопаток данного типа.
6.2.4 Установить акселерометр используемого измерительного прибора на приспособление.
6.2.5 Произвести эталонирование усилия зажатия лопатки данного типа, для этого необходимо выполнить следующие операции.
6.2.5.1 Произвести зажим эталонной лопатки для партии лопаток, подлежащей контролю согласно указаниям п.3.2.
6.2.5.2 Переключить прибор на режим ожидания удара.
6.2.5.3 Нанести молотком с резиновым наконечником лёгкий удар по лопатке.
6.2.5.4 Произвести отсчёт измеренной частоты прибором.
6.2.5.5 Сравнить полученные данные с эталонной частотой. При совпадении измеренной частоты с частотой эталона записать давление масла по манометру.
6.2.5.6 При несовпадении измеренной частоты с эталоном, изменяя давление масла производить измерение частоты. Усилие зажима, контролируемое манометром, при котором измеренная частота совпадёт с эталоном, в дальнейшем устанавливается таким же для контроля данного типа лопаток.
6.2.5.7 Раскрепить лопатку согласно указаниям п. 3.2.
6.2.5.8 Повторить зажим эталонной лопатки.
6.2.5.9 Повторить операции п.п. 6.2.5.1 – 6.2.5.4.
6.2.5.10 Эталонирование считается законченным, если при перезакреплении эталонной лопатки с одним и тем же усилием зажима собственная частота останется неизменной и будет соответствовать частоте эталона.
6.2.5.11 По окончании эталонирования раскрепить лопатку.
6.2.6 Закрепить в приспособлении лопатку, у которой предстоит измерить собственную частоту с определённым при эталонировании усилием.
6.2.7 Выполнить операции п.п. 6.2.5.2 – 6.2.5.4.
6.2.8 Записать измеренную частоту в протокол.
6.2.9 Раскрепить лопатку.
6.2.10 Для измерения частот следующих лопаток данной партии повторить операции п.п. 6.2.6 – 6.2.9.
7. Заключительные работы.
7.1 Отключить аппаратуру согласно инструкции по эксплуатации.
7.2 Отсоединить электрические кабели и убрать на место хранения, если возобновление работ не предполагается.
7.3 Заполнить протокол определения ЧСК исследуемого комплекта лопаток в 2-х экземплярах. Один экземпляр протокола подшить в дело, другой подшивается к паспорту (формуляру) данной партии лопаток.
Источники информации, принятые во внимание при составлении методического пособия по определению частот собственных колебаний узлов и деталей.
- Ананьев И.В., Тимофеев П.Г. Колебания упругих систем в авиационных конструкциях и их демпфирование. Машиностроение 1965г.
- Иванов В.П. Колебания рабочих колёс турбомашин. М. Машиностроение 1983г.
- Ковалёв В.К., Россеев Н.И., Монахов А.В. Замковое устройство.
Патент RU 2189023 C2
Автор: Ковалёв В.К. ДОАО «Центрэнергогаз» филиал «Самарский»
Прежде чем задать вопрос прочитайте: FAQ
Резонансные процессы — Не страшно, если ты один. Страшно, если ты ноль — LiveJournal
Глава 9 Резонансные процессы
Существенную роль во всех природных, так сказать, естественных процессах, играет явление резонанса, поэтому мы его рассмотрим подробнее. Начнем с резонансных явлений в эфире, которыми занимался Джон Кили (John Ernst Worrell Keely), основатель «физики симпатических вибраций» (Sympathetic Vibratory Physics www.svpvril.com). Он жил в Филадельфии, США, с 1827 по 1898 годы.
Рис. 97. Джон Кили и одна из его машин. Фото публикуется с разрешения www.svpvril.com
Созданная им в Нью-Йорке компания «Keely Motors» в 1874 году демонстрировала так называемый «мотор Кили», устройство производило полезную работу, используя «воду и воздух», создавая давление в сложной гидравлической системе. Он назвал мотор «гидро-пневматической пульсирующей вакуумной машиной». Позже Кили построил удивительное устройство «управления силами гравитации», которое выглядело, как медный шар 30 см в диаметре, окруженный трубками и стержнями (камертонами) различной длины. Касаясь пальцами камертонов, Кили вызывал вибрации различных тонов, сочетание которых производило на предметы эффекты левитации. Его современники утверждали, что Кили мог заставить летать в воздухе тяжелый стальной шар, просто играя на небольшом органе.
Джон Кили, считал, что любое вещественное образование, то есть «молекулярный агрегат», как он говорил, сколь бы мало оно ни было, пребывает в состоянии непрерывных внутренних вибраций, и возбуждает в окружающем его пространстве нечто, похожее на звуковые колебания. Очевидно, он говорил о продольных волнах в эфире.
Кроме того, каждое такое образование способно откликаться на приходящие извне колебания, причем различным образом, в зависимости от того, созвучно или нет это внешнее колебание среды собственной частоте. Если колебания двух тел созвучны друг другу, то тела притягиваются, если же в их звучании имеется диссонанс, то они избегают друг друга (отталкиваются). Все физические силы возникают вследствие определенного согласования (или рассогласованности) волновых характеристик вибрационных полей. Вибрации переносят не энергию, но только стимул к ее поглощению или выделению, то есть к преобразованию ее из скрытых форм в явные формы.
Энергия имеется повсюду в окружающем нас, и пронизывающем нас пространстве, причем, в неограниченных количествах. Вечное движение частиц эфира происходит повсюду и всегда, аналогично движению частиц воздуха. Запасы энергии в природе безграничны. Энергию эту мы не создаем, и не тратим, но мы можем, познав ее законы, преобразовывать ее в удобные для нас формы. Для этого нужно согласовать действия отдельных «молекулярных агрегатов», и достичь этого можно, добившись их созвучия.
Представьте, что перед Вами на столе стоит металлический штатив, который поддерживает полый медный шар (сферу) диаметром около 30 см. Вокруг основания штатива расположены многочисленные металлические стержни разной длины и толщины, вибрирующие, подобно камертонам, если их коснуться пальцами. Внутри сферы установлены пластины и резонансные трубки, взаиморасположение которых можно менять с помощью рукояток. Вся эта конструкция носит название «симпатического передатчика». Рядом находится цилиндрический стеклянный сосуд 25 см в диаметре и 120 см высотой, заполненный водой. Крышка сосуда, также металлическая, соединена со сферой с помощью толстой проволоки из золота, серебра и платины. На дне сосуда лежат три металлических шара, каждый весом около 1 кг. Как объясняет экспериментатор, каждый из шаров, так же как и любое другое материальное тело, обладает своей собственной внутренней мелодией. Изобретатель подходит к симпатическому передатчику, и поворачивает рукоятки, начинают вибрировать камертоны, вдруг коротко звучит труба, и шар на дне сосуда начинает покачиваться, затем медленно отрывается от дна и устремляется вверх. Он ударяется о крышку сосуда, отскакивает вниз, поднимается снова и, наконец, успокаивается, плотно прижавшись к ней. Вновь звучит труба, и второй металлический шар откликается на ее зов и всплывает. Затем – третий. Музыка стихает, но шары продолжают плавать, иногда чуть опускаясь, по-видимому, под влиянием посторонних аккордов».
Этот и многие другие удивительные эксперименты происходили в лаборатории Джона Кили в Филадельфии больше ста лет назад. Ученый говорил, что звук – это «нарушение атомного равновесия, разрушающее существующие связи атомных частиц, а освобожденная при этом субстанция, несомненно, должна быть эфирным течением некоторого порядка».
Интересная аналогия при чтении описания экспериментов Кили, возникает с показанной в фантастическом романе Александра Грина «Блистающий мир» конструкцией «чудесной летающей лодки», по краям которой висели колокольчики разного размера, прикасаясь к которым, и вызывая звук, можно было поднять лодку в воздух и привести ее в движение.
Можно сказать, что в основе всей Природы лежат эфирные вибрации разных частот, которые создают разнообразнейшие сочетания. При этом «созвучные», гармоничные сочетания вызывают притяжение и носят созидательный характер, а дисгармоничные вызывают отталкивание, разрушают. Создавая другие вибрации эфира, Кили мог делать вещи тяжелее, от этого они вдавливались в грунт под действием усиленной гравитации. Это не было силовым воздействием ультразвука на предметы, а реальным примером возбуждения эфира путем звуковых вибраций воздуха (молекулы воздуха также связаны с эфиром, как и все остальная материя). Сейчас это резонансное явление называется акустической левитацией, и активно изучается в прикладных целях.
Одно из изобретений Кили называлось «дезинтегратор материи» и предназначалось для разложения воды в газ, хотя могло заставить распадаться любую материю. Кили нашел, что резонансная частота «звука» для распада воды равна 42712,2 Герц. Для экспериментов по данной теме, можно рекомендовать использовать ультразвуковые пьезокерамические или магнитострикционные вибраторы, разместив их в толщине столба воды (на дне), и создавая вибрации вверх, то есть против вектора силы тяжести. Кстати, американский изобретатель Генри Пухарич, работы которого мы позже рассмотрим, нашел резонансные частоты распада воды, и одна из них равна примерно 42800 Гц, то есть такая же, как и частота Кили.
Гидро-пневматическая машина Кили, скорее всего, работала за счет создания газа высокого давления из воды, при резонансном воздействии на воду и ее разложении. Затраты энергии на создание вибраций по методу Кили были небольшими, а машина высокого давления имела значительную мощность.
Похожий метод разложения воды, с результатами 9 кубометров газа в секунду, предложил Олег Алексеевич Казаков, Алма-ата, Казахстан. Отличие метода Казакова от работ Кили в том, что Казаков разлагает воду в газ низкочастотными вибрациями, инфразвуком. Сообщения интересные, но мы не располагаем достоверными экспериментальными данными или схемой эксперимента Казакова.
В 1888 году Ричард Харт, современник Кили, написал книгу «Дезинтеграция камня». В ней он описал случай практического применения «дезинтегратора» Кили: «Однажды к Кили пришли посетители. Эти люди были крайне заинтересованы в быстром и дешевом способе получения золота, содержащегося в залежах кварца. И изобретатель оказал им эту услугу, легко прикасаясь маленьким устройством, которое он держал в руках, к кускам кварца, внутри которых были золотые вкрапления. И как только он дотрагивался до каждого из кусков, тот мгновенно рассыпался, превращаясь в пыль, а частички золота, содержащиеся в кварце, лежали, как галька в море песка. Тогда двенадцать солидных мужчин единодушно произнесли: «Господин Кили, если Вы таким же образом расщепите для нас кварц на руднике, каждый из нас выпишет Вам чек». Затем все они отправились в горы Катскилла, и там двенадцать мужчин указали на такой же основательный, как они сами, золотоносный кварцевый пласт на склоне горы, а Кили достал свое маленькое устройство и сказал: «Господа, запаситесь терпением». Через восемнадцать минут в этой кварцевой горе был туннель 5,5 м длиной и 1,4 м в диаметре. После этого с чеками в кармане Кили спокойно вернулся в Филадельфию, а двенадцать солидных мужчин отправились из Нью-Йорка в Сан-Франциско, чтобы приобрести, казавшиеся бесполезными, акции заброшенных рудников».
Далее, Харт пишет: «Дезинтеграция (расщепление) кварца – один из секретов Кили. Однако, эта дезинтеграция – всего лишь незначительное и второстепенное действие потрясающей силы, которая сокрыта в той загадке.
Действие же этой силы было обнаружено случайно. Однажды изобретатель изучал влияние потоков эфира на мелкий песок, рассыпанный на полу, причем струи эфира завивали песок «в жгуты». И вдруг кусок гранита, служивший для укрепления двери, рассыпался у него на глазах. Он понял намек, и через несколько дней изготовил вибрационный дезинтегратор».
Вибрационные технологии такого уровня представляют собой простой и красивый путь для развития техники, но при этом дают людям в руки оружие огромной силы.
Кили писал: «Моя система во всех частях и подробностях, покоится и основывается на симпатической (ответной) вибрации. Никаким другим способом невозможно пробудить или развить эту силу, и так же невозможно было бы привести в действие мою машину на другом принципе». (Из книги Ричарда Харта «Дезинтеграция камня», 1888 год.)
Отметим, что аналогичные современные исследования резонансных способов воздействия на материю и эфир успешно проводит в своей домашней лаборатории американский изобретатель Джон Хатчисон (Hutchison). Он использует электромагнитные методы возбуждения продольных волн эфира, но эффекты левитации предметов в его экспериментах очень напоминают «чудеса» Кили. Эффект Хатчисона основан на интерференции продольных волн эфира.
Механический резонанс — Mechanical resonance
График , показывающий , механический резонанс в механической колебательной системеМеханический резонанс является тенденцией к механической системе реагировать на большую амплитуду , когда частота его колебаний соответствует собственной частоте системы по вибрации (его резонансной частоты или резонансной частоте ) , чем это делает на других частотах. Это может вызвать бурные движения покачиваясь и даже катастрофические неудачи в неправильно построенных сооружениях , включая мосты, здание и самолеты. Это явление , известное как резонансная катастрофа.
Как избежать резонансных катастроф является одной из основных проблем в каждом здании, башни и моста строительного проекта. Taipei 101 здание опирается на 660-тонный маятнике -a инерционного демпфера -в изменить отклик в резонансе. Кроме того, структура предназначена , чтобы резонировать на частоте , которая обычно не происходит. Здания в сейсмических зонах часто строятся с учетом колебательных частот ожидаемого движения грунта. Кроме того, инженеры проектирование объектов , имеющие двигатели должны обеспечить, чтобы механические резонансные частоты составных частей не совпадают вождение частоты колебаний двигателей или других сильно осциллирующих части.
Многие резонансные объекты имеют более чем одну резонансную частоту. Это будет легко вибрировать на этих частотах, и в меньшей степени, на других частотах. Многие часы сохранить время путем механического резонанса в балансе колесо , маятник или кристалл кварца .
Описание
Собственная частота простой механической системы, состоящей из веса приостановлено весной:
- езнак равно12πКм{\ Displaystyle F = {1 \ над 2 \ пи} {\ SQRT {к \ над т}}}
где т есть масса , и к является постоянной пружины .
Набор качели простой пример резонансной системы , с которой большинство людей имеют практический опыт. Это форма маятника. Если система возбуждается (толкнул) с периодом между выталкивает равным обратной частоте собственных колебаний маятника, качание будет качаться выше и выше, но если возбуждаться на другой частоте, будет трудно двигаться. Резонансная частота маятника, единственная частота , на которой он будет вибрировать, дана приблизительно, для малых смещений, по уравнению:
- езнак равно12πгL{\ Displaystyle F = {1 \ над 2 \ пи} {\ SQRT {г \ над L}}}
где г есть ускорение силы тяжести (около 9,8 м / с 2 вблизи поверхности Земли ), и L представляет собой длина от точки поворота до центра масс. (An эллиптического интеграла дает описание для любого перемещения). Отметим , что в этом приближении частота не зависит от массы .
Механические резонаторы работают, передавая энергию многократно из кинетической в потенциальную форму и обратно. В маятнике, например, вся энергия хранятся в виде гравитационной энергии (в виде потенциальной энергии) , когда боб мгновенно неподвижно в верхней части ее качания. Эта энергия пропорциональна как масс боба и его высоту над самой нижней точкой. По мере того как Боб спускается и набирает скорость, его потенциальная энергия постепенно преобразуется в кинетическую энергию (энергия движения), которая пропорциональна массе боба и квадрату его скорости. Когда боб находится в нижней части своего путешествия, он имеет максимальную кинетическую энергию и минимальную потенциальную энергию. Тот же самый процесс , то происходит в обратном направлении , как боб поднимается по направлению к верхней части ее качания.
Некоторые резонансные объекты имеют более чем одну резонансную частоту, особенно при гармоник (кратных) самого сильного резонанса. Это будет легко вибрировать на этих частотах, и в меньшей степени, на других частотах. Это будет «выбрать» свою резонансную частоту от сложного возбуждения, например , в качестве импульса или широкополосного шума возбуждения. В действительности, оно отфильтровывать все , кроме его резонансных частот. В приведенном выше примере, свинг не может быть легко возбуждаются гармоническими частотами, но может быть возбуждена субгармоника .
Примеры

Различные примеры механического резонанса, включают:
Резонанс может вызвать бурные движения покачиваясь в неправильно построенных структурах, такие как мосты и здание. London Millennium Пешеходный (прозванный ИРМ Bridge ) показал эту проблему. Дефектный мост может даже быть разрушен его резонанса (см Broughton Висячий мост и Анже мост ). Механические системы хранения потенциальной энергии в различных формах. Например, пружина / масса система хранит энергию в виде напряженности в весенний период , который , в конечном счете хранится как энергия связи между атомами .
Резонанс катастрофы
В механике и конструкциях резонансное бедствие описывает разрушение здания или технического механизма по наведенным вибрациям при системной резонансной частоте, которая заставляет его колебаться . Периодическая возбуждения оптимально передает к системе на энергию вибрации и сохраняет его там. Из — за этого повторного хранения и дополнительного ввода энергии система раскачивается все сильнее, пока его предельная нагрузка не будет превышена.
Мост через пролив Такома
Драматическое, ритмичное скручивание , что привело к краху 1940 «Галопирующей Герти», оригинального Такома мост , иногда характеризуется в учебниках физики как классический пример резонанса. Катастрофические колебания , которые разрушили мост были из — за колебания , вызванного взаимодействием между мостом и ветрами , проходящими через его структуру-явление , известное как аэроупругий флаттер . Роберт Х. Скэнлон , отец области аэродинамики моста, написал статью об этом.
Другие примеры
Приложения
Различный Способ индукции механического резонанса в среде существует. Механические волны могут быть получены в среде, подвергая электромеханический элемент с переменным электрическим полем, имеющим частоту, которая вызывает механический резонанс и находится ниже любого электрического резонансной частоты. Такие устройства могут применять механическую энергию от внешнего источника к элементу, чтобы механически подчеркнуть элемент или применить механическую энергию, произведенную элементом на внешнюю нагрузку.
Патентное ведомство Соединенных Штатов классифицирует устройства , что испытания механического резонанса под подкласса 579, резонанс , частота , или амплитуды исследования, класса 73, Измерение и тестирование . Этот подкласс сам отступ под подклассом 570, вибрация. Такие устройства тестирование статьи или механизма , подвергая его вибрационную силу для определения качества, характеристик, или условия их, или зондирований, изучения или делать анализ колебаний , генерируемые в противном случае или существующий в статье или механизме. Устройства включают в себя правильные методы , чтобы вызвать вибрацию при естественном механического резонанса и измерения частоты и / или амплитуды резонанса сделаны. Различные устройства изучают ответ амплитуды над диапазоном частот производятся. Это включает в себя узловые точки , длины волн и стоячей волны характеристики , измеренные при заданных условиях вибрации.
Смотрите также
Заметки
дальнейшее чтение
- S Вертушка, мы Теффт, метод определения механических резонансных частот и для расчета модулей упругости от этих частот . Американское общество по испытаниям и материалам.
- CC Джонс, механический резонанс аппарат для студентов лабораторий . Американский журнал физики, 1995.