


Вопрос 3. Режим короткого замыкания асинхронной машины. — Студопедия.Нет
Режимом короткого замыкания асинхронной машины называется ее режим при s=1, т. е. при неподвижном роторе. Этот режим соответствует начальному моменту пуска асинхронного двигателя из неподвижного состояния. Сопротивление асинхронной машины относительно ее первичных зажимов при s=1 называется сопротивлением короткого замыкания Zk
или, так как  , приближенно
, приближенно

Вопрос 4. Индукционный регулятор. Фазорегулятор.
Фазорегулятор.Асинхронная машина с заторможенным фазным ротором может дать со стороны одной из обмоток постоянную по величине, но меняющуюся по фазе ЭДС. Для этого обмотки машины следует включить так, как показано на рис. 2.6,
На такой же угол окажется повернутым вектор ЭДС вторичной обмотки относительно вектора первичной ЭДС: в рассматриваемом случае результирующий поток  в зазоре машины набегает сначала, например, на обмотку фазы
в зазоре машины набегает сначала, например, на обмотку фазы  , а позже — на обмотку фазы
, а позже — на обмотку фазы  , оси которых пространственно смещены на угол поворота a. Если принять для простоты, что у рассматриваемой асинхронной машины
, оси которых пространственно смещены на угол поворота a. Если принять для простоты, что у рассматриваемой асинхронной машины 
 и
и  . В этом случае диаграмма напряжений для одной из фаз примет вид, показанный на рис. 1, б.
. В этом случае диаграмма напряжений для одной из фаз примет вид, показанный на рис. 1, б. Фазорегулятор представляет поворотный трансформатор с регулируемой фазой вторичного напряжения относительно первичного. Поворот ротора осуществляют при помощи червячного редуктора с самоторможением, так как на ротор фазорегулятора при нагрузке действует вращающий момент. Это относится и к другим машинам с заторможенным ротором. Фазорегуляторы применяют главным образом в лабораториях, в частности, при испытании счетчиков электрической энергии различных реле и других приборов и аппаратов.
Фазорегулятор представляет поворотный трансформатор с регулируемой фазой вторичного напряжения относительно первичного. Поворот ротора осуществляют при помощи червячного редуктора с самоторможением, так как на ротор фазорегулятора при нагрузке действует вращающий момент. Это относится и к другим машинам с заторможенным ротором. Фазорегуляторы применяют главным образом в лабораториях, в частности, при испытании счетчиков электрической энергии различных реле и других приборов и аппаратов.
Трехфазный индукционный регуляторслужит для регулирования напряжения трехфазной сети переменного тока. Обмотки регулятора включают по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.
Обмотки статора и ротора асинхронной машины можно соединить, как показано на рис. 2.7, а, и подключить обмотку ротора к сети напряжением 
 и
и  . Эти ЭДС, оставаясь неизменными по величине, могут отличаться по фазе.
. Эти ЭДС, оставаясь неизменными по величине, могут отличаться по фазе.При совпадении осей обмоток статора и ротора сдвига фаз между ЭДС и 
и и достигнет максимального значения (  ).
). При повороте ротора на некоторый угол
При повороте ротора на некоторый угол  вектор ЭДС опережает или отстает на тот же угол относительно ЭДС
вектор ЭДС опережает или отстает на тот же угол относительно ЭДС
и направлены встречно и выходное напряжение равно разности этих ЭДС. В общем случае напряжение на выходных зажимах определяется векторной суммой: (2.31)
(2.31)
и при равенстве эффективных витков статорной и роторной обмоток может плавно изменяться от нуля (при a = ± 180°) до двойного линейного напряжения сети (при a = 0).
Индукционные регуляторы по своей работе аналогичны автотрансформаторам, и их электромагнитная (расчетная) мощность тем меньше проходной (полезной), чем ниже пределы регулирования напряжения. Преимуществом регуляторов является плавное регулирование напряжения в широких пределах. К недостаткам этих машин следует отнести:
искажение формы кривой ЭДС (и выходного напряжения)
зубцовыми и высшими гармониками магнитного поля;
возникновение вращающих моментов на валу при a ≠ 0;
расхождение по фазе напряжений перед регулятором и за ним.
Последние два недостатка устраняют, сдвоив регуляторы, т. е. жестко соединив их валы и изменив порядок чередования фаз в одной из машин.
Вопрос 5. Рабочий процесс АД. Пространственная диаграмма МДС АД.
В процессе работы АД токи в обмотках статора и ротора создают в машине две намагничивающие силы: н.с. статора и н.с. ротора. Совместным действием этих н.с. в АД создаётся результирующий магнитный поток, вращающийся относительно статора с синхронной скоростью n1. Так же, как и в трансформаторе, этот магнитный поток можно рассматривать состоящим из основного потока Ф, сцеплённого как с обмоткой статора, так и с обмоткой ротора, и двух потоков рассеяния: потока рассеяния обмотки статора Фр1 и потока рассеяния обмотки ротора Фр2.
Рассмотрим, какие ЭДС наводятся в обмотках АД.
В обмотке статора. Основной магнитный поток Ф, вращающийся со скоростью n1, наводит в неподвижной обмотке статора ЭДС Е1, величина которой определяется выражением:
Е1 = 4,44Фfω1К1.
Магнитный поток рассеяния Фр1 наводит в обмотке статора ЭДС рассеяния Ер1, величина которой определяется индуктивным падением напряжения в обмотке статора:
— Ėр1 = jİ1х1, где х1 – индуктивное сопротивление рассеяния одной фазы обмотки статора. Кроме того, ток I1 в обмотке статора создаёт падение напряжения в активном сопротивлении:
Ėr = İ1
Ú1 = (- Ė1) + (- Ėр1) + Ėr,
Или
Ú1 = (-Ė1) + jİ1х1 + İ1r1 – уравнение ЭДС обмотки статора АД.
В обмотке ротора. В процессе работы АД ротор вращается в сторону вращения магнитного поля статора со скоростью n2. Поэтому скорость вращения поля статора относительно ротора равна разности скоростей n1 – n2. Основной магнитный поток Ф обмотки статора, обгоняя ротор со скоростью n1 – n2, индуктирует в обмотке ротора ЭДС:
Е2s = 4,44Фf2ω
Где К2 – обмоточный коэффициент обмотки ротора; ω2 – число последовательно соединённых витков одной фазы обмотки ротора; f2 – частота ЭДС Е2s.
Частота f2 определяется скоростью вращения магнитного поля статора относительно ротора n1 – n2 и числом пар полюсов обмотки статора:
f2 = р(n1 – n2)/60
Преобразуем выражение, получим:
f2 = р(n1 – n2)·n1/n1 = рn1/60·(n1 – n2)/n1 = f1s1,
т.е. частота ЭДС в обмотке ротора пропорциональна скольжению. Для большинства АД эта величина невелика и обычно составляет 2 – 2,5 Гц. Подставим полученное выражение в основную формулу, получим:
Е2s = 4,44 f1s1Ф ω2К2 = Е2s.
Е2 представляет собой ЭДС, наведённую в обмотке ротора при скольжении равном единице, т.е. при неподвижном роторе. Поток рассеяния ротора Фр2 индуктирует в обмотке ротора ЭДС рассеяния Ер2, величина которой определяется индуктивным падением напряжения в этой обмотке:
Ėр2 = — jİ2sх2,
Где х2 – индуктивное сопротивление рассеяния обмотки при неподвижном роторе. Так как в процессе работы АД обмотка ротора замкнута накоротко, то сумма ЭДС в цепи ротора равна нулю:
sĖ2— jİ2sх2 –İ2r2 = 0, где r2 – активное сопротивление цепи ротора.
Разделив все члены равенства на s, получим уравнение ЭДС для цепи обмотки ротора: Ė2 — jİ2х2 — İ2(r2/s) = 0.
Пространственные и временные векторные диаграммы.
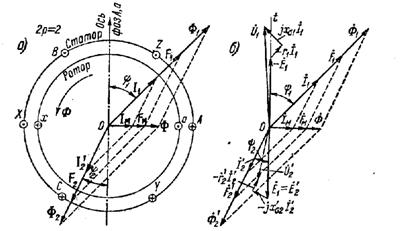
а) б)
Рассмотрим на примере двухполюсной машины с трехфазными обмотками. Оси времени направлены вверх. Токи в фазах А и а положительны, положительные направления э. д. с. совпадают с положительными направлениями токов. Потокосцепления или полные потоки фаз А и а положительны и максимальны, когда ось результирующего магнитного потока на направлена вверх. При положительных и максимальных токах  и
и  в фазах А и а векторы н. с. первичной и вторичной обмоток А и а будут также направлены вверх. Чередование фаз выбрано таким, чтобы направления вращения магнитного поля на рис. а и векторов на рис. б были одинаковы.
в фазах А и а векторы н. с. первичной и вторичной обмоток А и а будут также направлены вверх. Чередование фаз выбрано таким, чтобы направления вращения магнитного поля на рис. а и векторов на рис. б были одинаковы.
Диаграмма рис. а построена для момента времени, когда потокосцепления фаз А и а от результирующего потока Ф. равны нулю и достигают положительных максимумов через четверть периода тока. При этом пространственный вектор потока Ф на рис.а и временной вектор этого же потока Ф на рис. б будут направлены одинаково, а именно вправо.
Э. д. с.  индуктируемые в фазах А и а результирующим потоком Ф, вследствие совпадения осей этих фаз обмоток совпадают по фазе во времени (рис. б). В рассматриваемый момент времени они проходят через отрицательный максимум, как это следует из рис. б н как это можно также установить из рис. а по правилу правой руки.
индуктируемые в фазах А и а результирующим потоком Ф, вследствие совпадения осей этих фаз обмоток совпадают по фазе во времени (рис. б). В рассматриваемый момент времени они проходят через отрицательный максимум, как это следует из рис. б н как это можно также установить из рис. а по правилу правой руки.
Пространственный вектор основной гармоники результирующей н.с. обмоток статора и ротора

представляет собой геометрическую сумму их н.с. и будет совпадать на рис. а с направлением вектора Ф. Можно построить также пространственный вектор н. с. первичной обмотки:
Пространственный вектор потока первичной обмотки Ф совпадает в пространстве по фазе с вектором F1 (рис. 24-2, а), и для векторов потока существует соотношение
аналогичное соотношению для пространственных векторов соответствующих н. с.
Параллельно векторам н. с.  и
и  на рис. а можно построить также пространственные векторы пропорциональных им токов первичной и вторичной обмоток
на рис. а можно построить также пространственные векторы пропорциональных им токов первичной и вторичной обмоток  и.
и.  Эти последние векторы можно рассматривать и как пространственные векторы вращающихся пространственных волн тока или линейной нагрузки первичной и вторичной обмоток
Эти последние векторы можно рассматривать и как пространственные векторы вращающихся пространственных волн тока или линейной нагрузки первичной и вторичной обмоток
Результирующая н. с.

или при переходе к приведенной вторичной обмотке
Геометрическую сумму первичного и вторичного приведенного токов

как и у трансформаторов, называют намагничивающим током.
Таким образом, пространственные и временные векторы диаграммы электромагнитных величин асинхронной машины с заторможенным ротором при совпадении осей фаз обмоток статора и ротора совершенно идентичны. В частности, волны н. с. обмоток статора и ротора сдвинуты в пространстве вдоль окружности машины на такие же углы, на какие сдвинуты по фазе токи соответствующих фаз этих обмоток, и т. д.
Нетрудно также установить, что проекции векторов токов и потокосцеплений на оси фаз А н а рис. а, а также на оси других фаз определяют мгновенные значения токов и потокосцеплений соответствующих фаз. Отметим также, что развитые в связи с рассмотрением рис. а представления о пространственных векторах широко используются в современной математической теории переходных процессов машин переменного тока.
Режим короткого замыкания АД
Если теперь ротор оставить неподвижным, а его обмотку замкнуть, то будет иметь место короткое замыкание АД, подобное короткому замыканию трансформатора. Этот режим имеет место в первый момент пуска АД, когда ротор еще не пришел во вращение. Ток ста-тора АД при коротком замыкании составляет (4…7) ?н, поэтому во избежание чрезмерного нагревания и повреждения изоляции обмоток двигатель нельзя длительно оставлять при коротком замыкании под полным напряжением.
Часть картины распределения магнитных полей АД при коротком замыкании показана на рис.1 (б).
Рис. 1 — Распределение магнитных полей заторможенного асинхронного двигателя при коротком замыкании
Основной магнитный поток Фо создается в этом режиме совместным действием МДС статора F1 и ротора F2
т.е. выполняется равенство:
где m1 и m2 – число фаз обмотки статора и ротора соответственно, p –число пар полюсов.
Это равенство можно преобразовать к виду:
Уравнение носит название уравнения равновесия токов и справедливо для любого режима работы АД.
Если величиной тока ?о пренебречь, то будет иметь равенство:
Отношение:
Магнитный поток рассеяния Фрс2 создает в обмотке ротора ЭДС рассеяния Ерс2, величина которой определяется равенством:
где x2 – индуктивное сопротивление рассеяния обмотки ротора.
Падение напряжения на активном сопротивлении обмотки ротора равно:
Уравнения равновесия ЭДС для обмоток статора и ротора имеет вид:
Схема замещения вторичной цепи при неподвижном роторе представлена на рис. 2.
Рис. 2 — Схема замещения вторичной цепи при неподвижном роторе
Ток ротора ?2 определяется из выражения:
Если в асинхронной машине с заторможенным ротором в цепь обмотки ротора включить сопротивление нагрузки, то ее можно использовать в качестве трансформатора.
Режимы и принцип работы асинхронной электрической машины
Асинхронно – слово греческого происхождения (ασύγχρονα, где: α- отрицание, σύγ — вместе, χρονα – время), используется в русском языке для обозначения (наименования) процессов не совпадающих во времени.
Асинхронной, в электротехнике, принято называть машину, в процессе работы которой частота вращения ротора не равна частоте изменения магнитного поля создаваемого обмотками статора, вызывающего это вращение.
К асинхронным электрическим машинам относятся: асинхронные электрические двигатели с короткозамкнутым ротором, асинхронные электрические двигатели с фазным ротором, асинхронные микродвигатели общего применения, асинхронные тахогенераторы и другие, работающие по тому же принципу. Асинхронные электрические машины очень широко распространены благодаря таким качествам как: высокая надёжность, относительно низкая стоимость, приемлемые габариты и вес, просты в обслуживании. С появлением современных частотных преобразователей значительно расширился спектр применения асинхронных электродвигателей, благодаря возможности довольно просто и оптимально реализовывать такие функции как управление по скорости и моменту, вплоть до решения задач позиционирования. Не удивительно, что асинхронные электрические машины применяются повсюду, особенно это касается асинхронных электрических двигателей, объём выпуска которых занимает около 90% общего объёма мирового выпуска электродвигателей.
Принцип действия и режимы работы
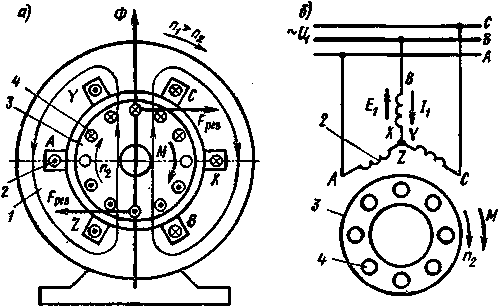
Рассмотрим принцип работы асинхронной электрической машины с помощью электромагнитной схемы (рис.1,а), которая отличается от электромагнитной схемы трансформатора тем, что неподвижный статор 1 представляет собой первичную обмотку, а вращающийся ротор 3 – вторичную. Магнитная связь между ротором и статором зависит от величины воздушного зазора между ними, поэтому, при изготовлении машины, в большинстве случаев, его стараются делать как можно меньше. На статоре расположена обмотка 2, катушки которой размещаются равномерно по его окружности. Обмотку статора (фазы A-X , B-Y, C-Z ) выполняют трёхфазной, или в общем случае многофазной, и соединяют её фазы в Y (звезду) или в  (треугольник), что оказывает существенное влияние на такие характеристики как: мощность, плавность хода, величины пусковых токов и других параметров. Обмотку ротора а-x, b-y, c-z также выполняют трёхфазной или многофазной и тоже равномерно размещают по его окружности. В простейшем случаях включения, фазы ротора а-x, b-y, c-z, замыкают накоротко (см. рис. 1,б).
(треугольник), что оказывает существенное влияние на такие характеристики как: мощность, плавность хода, величины пусковых токов и других параметров. Обмотку ротора а-x, b-y, c-z также выполняют трёхфазной или многофазной и тоже равномерно размещают по его окружности. В простейшем случаях включения, фазы ротора а-x, b-y, c-z, замыкают накоротко (см. рис. 1,б).
 Рис.1. Электромагнитная схема асинхронной машины (а – направление электромагнитного момента при работе в режиме двигателя, б – подключение к сети трёхфазного тока) , где: 1- неподвижный статор; 2- обмотка статора; 3- вращающийся ротор; 4- обмотка ротора.
Рис.1. Электромагнитная схема асинхронной машины (а – направление электромагнитного момента при работе в режиме двигателя, б – подключение к сети трёхфазного тока) , где: 1- неподвижный статор; 2- обмотка статора; 3- вращающийся ротор; 4- обмотка ротора.Когда обмотки статора асинхронной электрической машины подключены к сети трехфазного тока, в нём создаётся вращающееся магнитное поле, частота вращения которого (n1) синхронна с частотой сети, питающей эти обмотки, и вычисляется по формуле:
n1 = 60 x f1 / p
где: n1 – частота вращения магнитного поля статора; f1 – частота сети; p – число пар полюсов обмоток статора.
Вращающееся магнитное поле индуктирует в проводниках ротора электрической машины ЭДС, что вызывает прохождение по ним тока, взаимодействие которого с магнитным потоком создаёт электромагнитный момент. Направление ЭДС, индуктированной в проводниках обмоток ротора, показано на рисунке 1, а согласно правилу правой руки, для случая, когда вращении магнитного потока (Ф) происходит по часовой стрелке. Крестики и точки на рисунке показывают направление активной составляющей тока ротора, совпадающего по фазе с индуктированной ЭДС.
Известно, что если проводники с током расположить в магнитном поле, то на них будут действовать электромагнитые силы, направление которых можно определить при помощи правила левой руки. Приложенное к каждому проводнику ротора суммарное усилие (Fрез), создаёт электромагнитный момент (М), который “увлекает” ротор за вращающимся магнитным полем, создаваемым обмотками статора.
Ротор вращается, если величина момента (М) достаточна для преодоления внутренних сил трения (подшипники, сопротивление воздуха и так далее), а также тормозного момента, приложенного к валу от приводимого во вращение механизма, если таковой имеется. Установившаяся частота вращения ротора (n2) зависит от соотношения вышеперечисленных сил и создаваемых ими моментов. Очевидно, что при этом будет выполняться соотношение:
0 ≤ n2 <n1. Такой режим работы асинхронной машины называется двигательным. Разность частот n1 (вращения магнитного поля) и n2 (вращения ротора), выраженную в относительных единицах, принято называть скольжением. Наверное потому, что вращающееся магнитное поле статора “скользит” по обмоткам ротора “увлекая” ротор за собой, подобно скольжению потоков жидкости или воздуха по лопастям турбин гидравлических или пневматических машин.
Скольжение определяют по формуле:

где: s – скольжение; n1 – частота магнитного поля статора; n2 – частота вращения ротора. Скольжение также может быть представлено и в процентном соотношении:

Поскольку, при двигательном режиме выполняется соотношение 0 ≤ n2 <n1, то очевидно, что скольжения для этого режима будет находиться в пределах 1≥ S >0 (или 100%≥ S >0%).
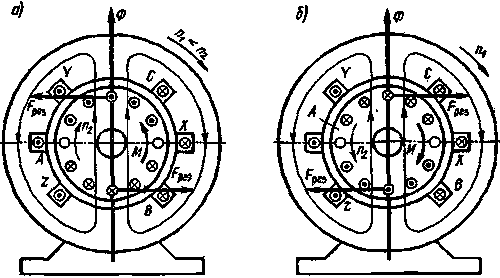
Но асинхронная электрическая машина может работать и в других режимах. Если её ротор разогнать до частоты превышающей частоту магнитного поля статора (то есть n2>n1) при помощи внешнего момента другого механизма (например механически соединить с двигателем, вал которого вращается быстрее), то изменятся направление ЭДС и активной составляющей тока в проводниках обмотки ротора, что вызовет переход машины в генераторный режим работы (рис.2,а). Электромагнитный момент (М), при этом, становится тормозящим изменив своё направление, а электрическая машина, получая механическую энергию от внешнего источника, превращает её в электрическую и отдаёт в сеть, питающую обмотки статора. В генераторном режиме выполняются соотношения: n2>n1, S<0.
Если в момент работы асинхронной электрической машины в двигательном режиме (когда 0 ≤ n2 <n1, а 1≥S >0) изменить направление вращения магнитного поля статора (например, изменив схему подключения обмоток статора к питающей сети с помощью магнитных пускателей), так чтобы магнитное поле статора стало вращаться противоположно направлению вращения ротора, то машина перейдёт в режим электромагнитного торможения (рис.2,б). При этом, ЭДС и активная составляющая тока в проводниках обмотки ротора будут сохранять (до определённого момента) то же направление, что и в прежнем двигательном режиме. Машина будет продолжать получать энергию от питающей сети, но эта энергия будет направлена на торможение вращения ротора. Электромагнитный момент (М), в данном режиме, как результат взаимодействия электромагнитных сил, направлен против вращения ротора и является тормозящим.
 Рис.2. Направление электромагнитного момента в асинхронной машине (а – при работе в генераторном режиме; б – при работе в режиме электромагнитного торможения).
Рис.2. Направление электромагнитного момента в асинхронной машине (а – при работе в генераторном режиме; б – при работе в режиме электромагнитного торможения).На практике, асинхронные электрические машины чаще всего работают в двигательном режиме, что, в свою очередь, довольно часто не исключает применений режима электромагнитного торможения электродвигателей.
Итого, кратко повторим, асинхронная электрическая машина работает только при наличии скольжения, то есть неравенстве частот n1 и n2. Только в этом случае в обмотках ротора сможет индуктироваться ЭДС, и как следствие, возникать электромагнитный момент. Поскольку ротор вращается не синхронно с полем статора, машину называют асинхронной.

Режим короткого замыкания для электродвигателей
Электрическая машина во многом схожа по принципу работы с электрическим трансформатором. В особенности это касается электрических машин переменного тока. В самом деле, ведь статорная обмотка или обмотка возбуждения аналогичны первичной обмотке трансформатора. Роль вторичной обмотки выполняет роторная обмотка асинхронного двигателя или обмотка статора двигателя синхронного.
Конечно, эти аналогии условны и иногда неявны. Существенным отличием асинхронного двигателя является то, что его «вторичная» обмотка под воздействием переменного электромагнитного поля приходит в движение. Возникает электромагнитный момент.
А из-за движения ротора ток в его обмотке имеет частоту намного меньшей частоты по сравнению с частотой тока статорной цепи. У двигателей же постоянного тока с трансформаторами есть еще меньше общего в принципе работы.
Трансформаторов на постоянном токе просто не существует. Однако электромагнитная связь между первичной и вторичной обмотками – это общая черта для всех электрических машин и трансформаторов.
И по аналогии с трансформатором для любого двигателя возможен режим короткого замыкания вторичной обмотки. При этом речь идет не о выходе на естественную характеристику электрической машины, когда в роторной или якорной цепи отсутствуют дополнительные регулировочные сопротивления – речь идет о случаях, когда из-за чрезмерной нагрузки на рабочем валу электромотор вынужден остановиться. При этом электромагнитный момент двигателя достигает максимального или близкого к максимальному (для асинхронников) значения.
Поскольку электромагнитный момент любого электромотора имеет прямую зависимость от величины потребляемого тока, то останов из-за повышенного статического момента сопротивления неизбежно ведет к многократным перегрузкам двигателя по току. Именно поэтому подобный режим часто называют «режимом короткого замыкания электродвигателя».
Режимы короткого замыкания не так уж и редки в работе электродвигателей. Причиной их может стать неисправность трансмиссии, например, заклинивание редуктора. Возможен также неправильный расчет электропривода и выбор двигателя, не соответствующего по механическим характеристикам.
Для многодвигательных электроприводов переход в режим короткого замыкания может быть связан с выходом одного или нескольких электродвигателей из строя.
Значительная часть электроприводов может быть технологически перегружена настолько, что электродвигатель не сможет развить необходимый момент, и перейдет в режим короткого замыкания. Это, например, привод грузоподъемных машин, транспортный, конвейерный привод. Электротехнологический персонал, работающий с установками, использующими подобный привод, в обязательном порядке получает инструкции, касающиеся механических перегрузок и действий при их возникновении.
Но полагаться в вопросах защиты привода от перегрузок по току исключительно только на грамотность персонала не следует. Поэтому приводные двигатели принято защищать при помощи максимально-токовых реле (например РЭО-411), блок-контакты которых включаются в цепь управления двигателя.
Для граничных положений, в которых механизм привода должен остановиться естественным образом, предусматривают концевые выключатели путевой защиты. Таким образом, двигатель защищается от режима короткого замыкания, если, допустим, механизм дошел до тупиковых упоров.
Для ответственных и мощных электроприводов нередко формируют искусственную электромеханическую характеристику, получившую название «экскаваторной». Формируется она при помощи тиристорных преобразователей либо другой полупроводниковой техники, и суть ее сводится к тому, что двигатель прекращает свое вращение сразу после возникновения недопустимой нагрузки без перехода в режим короткого замыкания и превышения тока. Экскаваторная характеристика состоит из двух частей: жесткой рабочей части и почти вертикальной характеристики, на которой привод останавливается.
Экспериментальное исследование асинхронных двигателей | Электрические машины
Страница 13 из 51
|

Экспериментальное исследование асинхронных двигателей проводится с целью определения параметров схемы замещения (рис. 4.8). Программа исследований включает два опыта: опыт холостого хода и опыт короткого замыкания. Эти опыты легко реализуются, для их проведения требуется минимальная мощность установленного оборудования. Экспериментальные исследования асинхронных двигателей в рабочих режимах, как правило, не проводятся в виду их большой трудоемкости и стоимости. Характеристики асинхронных двигателей в рабочих режимах получают расчетным путем по схеме замещения.
Опыт холостого хода
Схема экспериментальной установки представлена на рис. 4.14. Схема включает кроме испытуемого двигателя (АД) индукционный регулятор (ИР) для регулирования напряжения статора АД, измерительный комплект (ИК) для регистрации тока, активной мощности и напряжения статора, тахогенератор (ТГ) для измерения частоты вращения n и машину постоянного тока (МПТ) для затормаживания ротора.
 |
Опыт холостого хода проводится без нагрузки на валу (ключ К разомкнут) для нескольких значений напряжения  в диапазоне
в диапазоне  . Измеряются фазные токи
. Измеряются фазные токи  и активная мощность
и активная мощность  , подводимая к обмотке статора. По данным опыта строят зависимости
, подводимая к обмотке статора. По данным опыта строят зависимости  ,
,  ,
,  . Вид этих зависимостей представлен на рис. 4.15. Согласно энергетической диаграмме (рис. 4.10) потребляемая на холостом ходу мощность расходуется на покрытие потерь в обмотке статора
. Вид этих зависимостей представлен на рис. 4.15. Согласно энергетической диаграмме (рис. 4.10) потребляемая на холостом ходу мощность расходуется на покрытие потерь в обмотке статора  , потерь в стали
, потерь в стали  и механических потерь
и механических потерь  . Потерями в роторной обмотке
. Потерями в роторной обмотке  можно пренебречь, так как в опыте холостого хода скольжение весьма мало (
можно пренебречь, так как в опыте холостого хода скольжение весьма мало ( ). Вычитая из потерь холостого хода
). Вычитая из потерь холостого хода  электрические потери
электрические потери  , получим сумму потерь в стали и механических потерь:
, получим сумму потерь в стали и механических потерь: .
.
Разделение этих потерь производится путем экстраполяции зависимости  до пересечения с осью ординат (рис. 4.16). Данный способ разделения потерь основан на том, что потери в стали пропорциональны
до пересечения с осью ординат (рис. 4.16). Данный способ разделения потерь основан на том, что потери в стали пропорциональны , а потери механические
, а потери механические  не зависят от напряжения
не зависят от напряжения  , так как частота вращения ротора во время опыта холостого хода остается практически постоянной. Однако при очень малых значения напряжения
, так как частота вращения ротора во время опыта холостого хода остается практически постоянной. Однако при очень малых значения напряжения  частота вращения ротора снижается, растут скольжение и потери в обмотке ротора, не учитываемые при разделении потерь. Этим объясняется отклонение зависимости
частота вращения ротора снижается, растут скольжение и потери в обмотке ротора, не учитываемые при разделении потерь. Этим объясняется отклонение зависимости  от прямой в зоне малых напряжений. Его не следует учитывать при экстраполяции.
от прямой в зоне малых напряжений. Его не следует учитывать при экстраполяции.
Полученные данные позволяют рассчитать следующие параметры схемы замещения асинхронного двигателя:
 |
 ;
;  ;
;  .
.
Расчет проводится по данным опыта холостого хода при номинальном напряжении ( ). Сопротивление обмотки статора
). Сопротивление обмотки статора  определяется постоянным током перед опытом холостого хода.
определяется постоянным током перед опытом холостого хода.
Опыт короткого замыкания
|

В опыте короткого замыкания ротор асинхронного двигателя должен быть заторможен ( ). Это достигается с помощью машины постоянного тока (рис. 4.14). Ключ К замыкается, а в обмотку возбуждения подается постоянный ток. Опыт проводится при различных значениях подводимого напряжения
). Это достигается с помощью машины постоянного тока (рис. 4.14). Ключ К замыкается, а в обмотку возбуждения подается постоянный ток. Опыт проводится при различных значениях подводимого напряжения  , так чтобы ток статора
, так чтобы ток статора  находился в пределах
находился в пределах  .
.
По данным опыта короткого замыкания строят зависимости  ,
,  . В рассматриваемом диапазоне токов
. В рассматриваемом диапазоне токов  характеристика
характеристика  носит прямолинейный характер (рис. 4.17). Отклонение от линейности происходит при
носит прямолинейный характер (рис. 4.17). Отклонение от линейности происходит при  и объясняется влиянием насыщения стали на индуктивные сопротивления рассеяния обмоток. Потери короткого замыкания
и объясняется влиянием насыщения стали на индуктивные сопротивления рассеяния обмоток. Потери короткого замыкания  , как и в трансформаторе, определяются, главным образом, электрическими потерями в обмотках:
, как и в трансформаторе, определяются, главным образом, электрическими потерями в обмотках:  .
.
Этим объясняется параболический характер зависимости  .
.
Данные опыта короткого замыкания при  используются для определения следующих параметров:
используются для определения следующих параметров: ;
;  .
.
Аналитические выражения токов и электромагнитного момента асинхронной машины (см. п. 4.6) содержат параметр  . Для его определения можно воспользоваться приближенным выражением
. Для его определения можно воспользоваться приближенным выражением .
.
Активное сопротивление обмотки ротора входит в расчетные выражения либо непосредственно, либо в виде величины  . Для их определения используются приближенные соотношения
. Для их определения используются приближенные соотношения ;
; .
.
Назначение и принцип действия асинхронных машин
Назначение.
Асинхронные машины — наиболее распространенные электрические машины. Особенно широко они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую. В настоящее время асинхронные электродвигатели потребляют около половины всей вырабатываемой в мире электроэнергии и находят широкое применение в качестве электропривода подавляющего большинства механизмов. Это объясняется простотой конструкции, надежностью и высоким значением КПД этих электрических машин.
Открытие асинхронных машин относится к 80-м годам прошлого столетия. Их создание связывают с именами итальянского ученого Г. Феррариса, югославского ученого Н. Тесла и русского ученого М. О. Доливо-Добровольского. Г. Феррарис и Т. Тесла независимо друг от друга в 1888 г. предложили способ получения двухфазного вращающегося поля и создали первые асинхронные машины. Однако эти двигатели не получили широкого применения.
Большую роль в создании асинхронных Двигателей сыграл М. О. Доливо-Доброволъский. В 1889 г. он впервые использовал трехфазный ток для получения вращающегося магнитного поля, применил на статоре распределенную трехфазную обмотку и обмотку ротора в виде беличьей клетки. Он также предложил трехфазную обмотку ротора, выведенную на контактные кольца, и использовал для пуска двигателя реостат, подключаемый к обмотке ротора через контактные кольца.
Почти за 100 лет существования асинхронных двигателей в них совершенствовались применяемые материалы, конструкция отдельных узлов и деталей, технология их изготовления; однако принципиальные конструкторские рещения, предложенные М. О. Доливо-Добровольским, в основном остались неизменными. В дальнейшем большое применение получили также и однофазные асинхронные двигатели в основном для электробытовых приборов. Появилось также большое количество разновидностей и модификаций асинхронных машин, в частности асинхронные исполнительные двигатели, тахогенераторы, сельсины, поворотные трансформаторы и др.
Большой вклад в теорию асинхронных машин внесли советские ученые Б. П. Апаров, М. П. Костенко, Г. Н. Петров, К. И. Шенфер и др. В СССР впервые в мировой практике с 1946 г. асинхронные двигатели выпускаются едиными всесоюзными сериями. На базе единых серий в нашей стране организовано высокомеханизированное и автоматизированное крупносерийное производство на основе широкой специализации и кооперации. Большие преимущества имеют единые серии и в эксплуатации — они значительно облегчают выбор, установку, обслуживание и ремонт электрооборудования. В 70-х годах была разработана и внедрена единая серия асинхронных двигателей 4А. Одновременно с конструкцией двигателей разрабатывались электротехническая сталь, провода, изоляция и технология. В 80-х годах организацией социалистических стран «Интерэлектро» разработана новая унифицированная серия асинхронных двигателей АИ, предназначенная для использования во всех странах — членах СЭВ. Машины серии АИ, которые производятся во всех этих странах, отличаются повышенными надежностью и перегрузочной способностью, расширенным диапазоном регулирования, лучшими массово-габаритными и энергетическими показателями, а также улучшенными виброакустическими характеристиками по сравнению с машинами серии 4А. В СССР впервые в мире разработана методика оптимизированного расчета асинхронных двигателей, учитывающая затраты как на производство, так и на эксплуатацию электродвигателей; расчет с помощью электронно-вычислительных машин ведется по минимуму суммарных затрат в народном хозяйстве. В теорию и практику создания единых серий асинхронных двигателей большой вклад внесли советские ученые и инженеры А. Г. Иосифьян, Б. И. Кузнецов, Э. Д. Кравчик, В. И. Радин, Т. Г. Сорокер, И. Н. Чарахчьян и др.
Принцип действия.
В асинхронной машине одну из обмоток размещают на статоре 1 (рис. 4.1, а), а вторую — на роторе 3. Между ротором и статором имеется воздушный зазор, который для улучшения магнитной связи между обмотками делают по возможности малым. Обмотка статора 2 представляет собой трехфазную (или в общем случае многофазную) обмотку, катушки которой размещают равномерно по окружности статора. Фазы обмотки статора АХ, BY и CZсоединяют по схеме Υ или Δ и подключают к сети трехфазного тока (рис. 4.1,6). Обмотку ротора4 выполняют трехфазной или многофазной и размещают равномерно вдоль окружности ротора. Фазы ее в простейшем случае замыкают накоротко.
| Рис. 4.1. Электромагнитная схема асинхронной машины, направления токов и электромагнитного момента при работе в двигательном режиме |
При питании обмотки статора трехфазным током создается вращающееся магнитное поле, частота вращения которого (синхронная)
n1 = 60f1 /p.
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС. На рис. 4.1, а показано, согласно правилу правой руки, направление ЭДС, индуцированной в проводниках ротора при вращении магнитного потока Ф по часовой стрелке, при этом проводники ротора перемещаются относительно потока Ф против часовой стрелки. Активная составляющая тока ротора совпадает по фазе с индуцированной ЭДС; поэтому условные обозначения (крестики и точки) на рис. 4.1 показывают одновременно и направление активной составляющей тока.
На проводники с током, расположенные в магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарное усилие Fрез, приложенное ко всем проводникам ротора, образует электромагнитный момент М, увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение и его установившаяся частота вращения п2 соответствует равенству электромагнитного момента тормозному, создаваемому приводимым во вращение механизмом и внутренними силами трения. Такой режим работы асинхронной машины является двигательными, очевидно, в данном случае 0 ≤ п2 < п1.
Относительную разность частот вращения магнитного поля и ротора называют скольжением:
(4.1)
s = (п1 — п2)/п1.
Скольжение часто выражают в процентах
(4.1a)
s = [(п1 — п2 )/п1 ] • 100.
Очевидно, что при двигательном режиме 1 > s > 0.
Если ротор асинхронной машины разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля п1 то изменится направление ЭДС в проводниках ротора и активной составляющей тока ротора, т. е. асинхронная машина перейдет в генераторный режим (рис. 4.2, а). При этом изменит свое направление и электромагнитный момент М, который станет тормозящим. В генераторном режиме асинхронная машина получает механическую энергию от первичного двигателя, превращает ее в электрическую и отдает в сеть, при этом s < 0.
Если изменить направление вращения ротора (или магнитного поля) так, чтобы магнитное поле и ротор вращались в противоположных направлениях (рис. 4.2,6), то ЭДС и активная составляющая тока в проводниках ротора будут направлены так же, как в двигательном режиме, т. е. машина будет получать из сети активную мощность. Однако в данном
Рис. 4.2. Электромагнитная схема асинхронной машины, направления токов и электромагнитного момента при работе ее в режимах: |
Таким образом, характерной особенностью асинхронной машины является наличие скольжения, т. е. неравенство частот вращения n1 и п2. Только при указанном условии в проводниках обмотки ротора индуцируется ЭДС и возникает электромагнитный момент. Поэтому машину называют асинхронной (ее ротор вращается несинхронно с полем).
На практике обычно встречается двигательный режим асинхронной машины, поэтому теория асинхронных машин изложена здесь применительно к этому режиму с последующим обобщением ее на другие режимы работы.
Режим короткого замыкания двигателя — Справочник химика 21
При пуске асинхронных короткозамкнутых двигателей возникает пусковой ток, превышающий номинальный в 4—8 раз. Толчки пусковых токов вызывают понижение напряжения сети. При пуске небольших двигателей это понижение напряжения невелико, но при пуске асинхронных короткозамкнутых двигателей большой мощности оно может быть значительным. При значительном понижении напряжения сети, резко уменьшаются пусковой и критический моменты асинхронных двигателей, которые пропорциональны квадрату напряжения. Электродвигатели, работающие в это время с перегрузкой, могут остановиться и перейти в режим короткого замыкания (к. 3.). [c.13]РЕЖИМ КОРОТКОГО ЗАМЫКАНИЯ ДВИГАТЕЛЯ [c.50]
Пуск синхронного двигателя осуществляется со шкафа — ключом управления или дистанционно — нажатием кнопки пуска с внешнего пульта управления, воздействуя на электромагнит включения масляного выключателя В. Остановка синхронного электродвигателя осуществляется ключом управления, дистанционно — нажатием кнопки останова или от действия защит, воздействующих на электромагнит отключения масляного выключателя В. При отключении двигателя ключом управления, дистанционно или от действия защит (кроме защиты от короткого замыкания) отключается выключатель В, преобразователь переводится в инверторный режим и происходит форсированное гашение поля ротора. По окончании гашения поля импульсы управления перестают поступать в преобразователь. При срабатывании защиты от короткого замыкания импульсы управления снимаются без предварительного перехода в инверторный режим. [c.101]
От коротких замыканий и перегрузок свыше 200% электрические цепи и двигатели защищаются электромагнитными реле тока (максимальная защита). Тепловая защита на кранах обычно не применяется, так как крановые электродвигатели рассчитаны на повторно-кратковременный режим и значительные перегрузки, при которых возможны ложные срабатывания тепловых реле. [c.38]
Напряжение с выхода электромашинного усилителя подается через стабилизирующий трансформатор СТ в обмотку обратной связи ОС. Режим работы печи задается установкой тока дуги при помощи автотрансформатора АТ. Ъ заданном режиме работы печи при определен-1юм соотношении между величинами тока и напряжения дуги, поток обмотки ОУ равен нулю, напряжение на выходе усилителя отсутствует, электродвигатель Д не обтекается током, электрод неподвижен. После подачи напряжения на печь при поднятых электродах на выпрямителе появляется максимальное напряжение, электромашинный усилитель возбуждается, и двигатель Д опускает электрод Э с максимальной скоростью. При соприкосновении электрода с шихтой напряжение на выпрямителе ВН этого электрода исчезает, и двигатель быстро тормозится. При соприкосновении с шихтой другого электрода к обмотке ОУ усилителя регулятора первого электрода прикладывается максимальное напряжение ВТ как следствие тока короткого замыкания двух фаз. На якоре электромашинного усилителя ЭМУ появляется напряжение, и начинается разгон электродвигателя Д на подъем электрода. Затем ток выпрямителя ВТ уменьшается, а ток выпрямителя ВН увеличивается поток обмотки ОУ уменьшается, и скорость двигателя снижается. При достижении током заданного значения поток обмотки ОУ станет равным нулю. Обмотка ОС, размагничивающая усилитель, ускоряет остановку электродвигателя гашением оставшегося напряжения на якоре усилителя. Используемые для регулирования мощности регуляторы с электромашинным усилителем имеют малые постоянные времени (быстродействие) и большие коэффициенты усиления. [c.116]
Включение и выключение электродвигателей 1ЭД и 2ЭД осуществляется магнитными пускателями 1МП и 2МП. Режим работы двигателей как от перегрузки, так и от токов короткого замыкания защищается автоматическими выключателями 1АВ -и 2АВ типа АП-503МТ. Цепь управления защищена плавкими предохранителями ПП. [c.281]
Высоковольтные провода и кабели с фторопластовой изоляцией находят широкое применение в со1В(ре1мен- ой электронной аппаратуре для В нутри- и межблочных соединений, для выводов высоковольтных трансформаторов и в качестве проводов зажигания авиационных двигателей. В цепях анодного титания и цепях накаливания находят применение кабели иостояиного тока. Для соединения трансформаторов с выпрямительными блоками, а также блоков высокого напряжения различной радиоаппаратуры применяют кабели переменного тока. Импульсные кабели используют как в линиях формирования импульсов (в режиме короткого замыкания постоянного напряжения), так и для передачи напряжения к первичной обмотке импульсных трансформаторов или от них на магнетроны. Работа высокочастотных фидерных кабелей в реж>им е радиоимпульсов связана с передачей значительной импульсной мощности. [c.36]