


Реостатный пуск асинхронных двигателей — МегаЛекции
Прямое включение в сеть
Это самый простой и самый дешевый способ пуска. На двигатель вручную или с помощью дистанционного управления подается номинальное напряжение. Прямое включение в сеть допускается, если мощность двигателя не превышает 5% от мощности трансформатора, если от него питается и осветительная сеть. Ограничение по мощности объясняется бросками тока в момент пуска, что приводит к снижению напряжения на зажимах вторичных обмоток трансформатора. Если от трансформатора не питается осветительная сеть, то прямое включение в сеть можно применять для двигателей, мощность которых не превышает 25% от мощности трансформатора.
Пуск при пониженном напряжении
Этот способ применяют при пуске в ход мощных двигателей, для которых недопустимо прямое включение в сеть. Для понижения подводимого к обмотке статора напряжения используют дроссели и понижающие автотрансформаторы. После пуска в ход на обмотку статора подается напряжение сети. Основные недостатки этого способа пуска: высокая стоимость пусковой аппаратуры и невозможность пуска с нагрузкой на валу.
Реостатный пуск асинхронных двигателей
Этот способ применяют при тяжелых условия пуска, т.е. при большой нагрузке на валу. Для реостатного пуска используют асинхронные двигатели с фазным ротором, в цепь ротора включается пусковой реостат. Реостатный пуск служит для увеличения пускового момента. Одновременно происходит уменьшение пускового тока двигателя. По мере разгона двигателя пусковой реостат выводится и после окончания пуска обмотка ротора оказывается замкнутой накоротко.
 , (6.1)
, (6.1)где А – работа всех движущих сил; АС – работа всех сил сопротивления движению; Аj — работа всех сил инерции, равная запасу кинетической энергии системы, вращающейся со скоростью ω и имеющей приведенный к этой скорости момент инерции J:  . (6.2)
. (6.2)
Знаки перед А и АС
 ;
;  . (6.3)
. (6.3)
Выполнив операцию дифференцирования  в (6.2)., получим:
в (6.2)., получим:

Это выражение для Рj не противоречит принятым ограничениям. Действительно, в (6.4)  предполагает переменную движущуюся массу (переменный момент инерции), хотя и рассматривается электропривод с неизменным моментом инерции (J=const). В данном случае имеет место не действительное, а фиктивное изменение J, что может быть в механизмах с переменным передаточным числом (i≠const). Например, в кривошипно-шатунном механизме, где фактически постоянная масса ползуна движется поступательно, в результате пересчета к вращательному движению кривошипного вала, а затем и к валу двигателя получается переменный момент инерции в функции угла α поворота вала кривошипа (см. разд. 4.3). Выполним преобразование, наглядно показывающее зависимость J=f(α). Для этого умножим и разделим второе слагаемое в правой части (6.4) на dα:
предполагает переменную движущуюся массу (переменный момент инерции), хотя и рассматривается электропривод с неизменным моментом инерции (J=const). В данном случае имеет место не действительное, а фиктивное изменение J, что может быть в механизмах с переменным передаточным числом (i≠const). Например, в кривошипно-шатунном механизме, где фактически постоянная масса ползуна движется поступательно, в результате пересчета к вращательному движению кривошипного вала, а затем и к валу двигателя получается переменный момент инерции в функции угла α поворота вала кривошипа (см. разд. 4.3). Выполним преобразование, наглядно показывающее зависимость J=f(α). Для этого умножим и разделим второе слагаемое в правой части (6.4) на dα: 
Учтем здесь, что  , и получим
, и получим  . (6.5)
. (6.5)
Разделив теперь (6.3) на скорость вращения системы ω и учтя (6.5), получим уравнение движения электропривода, приведенное к этой скорости: 
Если ω – скорость вала двигателя, то все величины, входящие в (6.6), т.е. М, MС, J и α, также отнесены к этому валу.
Динамический момент Мj, т.е. правая часть уравнения (6.6), имеет две составляющие:  — составляющая динамического момента, определяемая изменением скорости ω;
— составляющая динамического момента, определяемая изменением скорости ω;  — составляющая Мj, определяемая изменением момента инерции при повороте вала на угол α.
— составляющая Мj, определяемая изменением момента инерции при повороте вала на угол α.
Для электроприводов, у которых i=const,  . В этом случае Mj2=0, и уравнение движения (6.6) упрощается, принимая вид:
. В этом случае Mj2=0, и уравнение движения (6.6) упрощается, принимая вид:  . (6.7)
. (6.7)
Обычно уравнение движения используется в форме  .
.
6)Двигатель постоянного тока независимого возбуждения-двигатель с электромагнитным возбуждением обмотка возбуждения которого питается от постоянного источника эл.Тока.
ДПТНВ характерны 3 режима торможения: 1)Рекуперативное; 2) Динамическое;3) торможение противовключения. 3способа регулирования скорости что вытекает из ф-лы  1способ) Изменение тока возбуждения двигателя 2)изменение сопротивления в цепи якоря. 3) изменение подводимого к двигателю напряжения.
1способ) Изменение тока возбуждения двигателя 2)изменение сопротивления в цепи якоря. 3) изменение подводимого к двигателю напряжения.
7)Двигатель постоянного тока –это машина постоянного тока предназначенная для преобразования эл.энергии постоянного тока в механическую. В зависимости от способа включения обмотки возбуждения различают 4 вида дпт: 1) независимого возбуждения-двигатель с электромагнитным возбуждением обмотка возбуждения которого питается от постоянного источника эл.тока. 2) дпт с параллельным возбуждением- двигатель обмотка возбуждения которого поключена параллельно обмотке якоря.3) дпт последовательного возбуждения- двигатель в котором обмотка возбуждения включена последовательно с обмоткой якоря.4) дпт смешанного возбуждения-двигатель с 2мя обмотками возбуждения, одна из которых соединена последовательно с обмоткой якоря. Способы регулирования скорости дпт: Изменение напряжения подводимого к обмотке якоря; введение добавочного сопротивления в цепь якоря; Изменение потока.
8) двигатель постоянного тока последовательного возбуждения- двигатель в котором обмотка возбуждения включена последовательно с обмоткой якоря. Для ДПТНВ возможны 2 тормозных режима: 1) режим торможения противовключения; 2)динамическое торможение. Регулировка скорости вращения двигателя с последовательным возбуждением производится или путем изменения напряжения, питающего двигатель, или изменением магнитного потока полюсов.
9)ДПТ параллельного возбуждения -двигатель обмотка возбуждения которого подключена параллельно обмотке якоря.
Регулирование скорости вращения двигателя с параллельным возбуждением обычно производится путем изменения магнитного потока, с помощью регулировочного реостата в цепи возбуждения. Торможение
Двигатели с параллельным возбуждением применяются в сетях постоянного тока для привода станков, механизмов (подвесные электрические дороги, насосы, вентиляторы, ткацкие машины, прокатные станы, шахтные подъемники), требующих постоянной скорости вращения или широкой регулировки скорости.
10) Асинхронный двигатель- вращающаяся машина переменного тока принцип работы которой основан на явлении электромагнитной индукции.

Для АД характерны следующие режимы торможения: 1) Рекуперативное 2) Противовключения 3) Динамическое способы регулирования скорости АД: изменение скорости электромагнитного поля статора 
20.Магнитный пускатель –комплектное устройство предназначенное главным образом для пуска 3х фазных асинхронных двигателей. Основной частью мп является 3х полюсный контактор переменного тока. Кроме того контактор имеет кнопки управления и тепловые реле.
принцип действия системы управления асинхронным двигателем с использованием реверсивного магнитного пускателя. В состав магнитного пускателя входит 2 контактора: КВ для вращения в перёд КН для вращения назад. Кроме того реверсивный мп имеет 3 кнопки управления и тепловые реле. В ряде случаев в коплект мп входят пакетный переключатель и плавкие предохранители. Для включения электродвигателя М в прямом направлении необходимо нажать кнопку SBI при этом срабатывает контактор КВ и своими силовыми контактами подключает к 3х фазной сети обмотки электродвигателя. Одновременно блокировочные контакты КВ разрывают цепь питания катушки контактора КН чем исключается вохможность одновременного включения обоих контакторов. Для включения электродвигателя в обратном направлении необходимо нажать кнопку SB2. В этом случае срабатывает контактор КН и своими силовыми контактами подключает к 3х фазной сети обмотки электродвигателя. Последовательность соединения фаз теперь иная чем при срабатывании контактора КВ:2 фазы из 3 поменялись мессами. При срабатывании контактора КН его блокировочные контакты разрывают цепь питания катушки контактора КВ. Нетрудно видеть что при одновременном включении контакторов КВ и КН произошло бы короткое замыкание 2х линейных проводов 3х фазной сети друг на друга. Для того чтобы исключить такую аварию и нужны блокировочные размакающиеся контакты контакторов КВ и КН. Если нажать 2 кнопки то включится тот контактор кнопка которого была нажата раньше. Для реверса электродвигателя надо предварительно нажать кнопку SB3 (стоп). В этом случае блокировочные контакты подготавливают цепь управления для нового включения. Для надёжной работы необходимо чтобы силовые контакты контактора разомкнулись раньше чем произойдёт замыкание блокировочных контактов в цепи другого контактора. Это достигается соответствующей регулировкой положения блокировочных по ходу якоря электромагнитного механизма контактора. Для блокировки кнопок SB1 и SB2 используются замыкающиеся блокировочные контакты соответствующего контактора подключённые параллельно кнопке.
21. Конта́ктор-двухпозиционный электромагнитный аппарат, с самавозратом предназначенный для частных коммутаций рабочих токов а также для редких отключений при токах перегрузки. Электромагнитный привод контактора переменного тока малой мощности имеет Ш-образный сердечник 1 и якорь 2, собранные из пластин электротехнической стали. Часть полюсов сердечника охвачена короткозамкнутым витком что предотвращает вибрацию якоря вызванную снижением до нуля при прохождении переменного синусоидального тока через ноль. Катушка 3 контактора охватывает сердечник и якорь, она и создаёт намагничивающую силу в магнитной системе контактора. На якоре 2 закреплены подвижные контакты 4 мостикового типа, что повышает надёжное отключение за счёт двукратного размыкания. В пластмассовом корпусе установлены неподвижные контакты 5 и 6. Пружина 7 возвращает контакты 4 в исходное положение. В 3х фазном контакторе –три контактные пары отделением друг от друга пластмассовыми перемычками 8. Главные контакты имеют металлокерамические накладки и защищены крышкой.
22. Контактор постоянного тока –это электромеханический аппарат устройства которого с якорем клапанного типа показано на рисунке. Контакторы постоянного тока предназначенные для ключения ДПТ имеют электромагнитный механизм питаемый постоянным током. Электромагнитный механизм поворотного типа состоит из сердечника 1 с катушкой 2 якоря 3 и возратной пружины 4. Сердечник 1 имеет полюсный наконечник необходимый для увеличения магнитной проводности рабочего зазора электромагнита. Немагнитная прокладка 5 служит для предотвращения залипания якоря. Силовой контактный узел состоит из неподвижного 6 и подвижного 7 контакторов. Контакт 7 шарнирно закреплён на рычаге8, связанном с якорем 3 и прижатом к нему нажимной пружиной 9. Подвод тока к подвижному контакту 7 выполнен гибкой медной лентой 10. Замыкание главных контакторов 6 и 7 происходит с проскальзыванием и перекатыванием что обеспечивает очистку контактных поверхностей от окислений и нагара. При срабатывании электромагнитного механизма кроме главных контактов переключаются вспомогательные контакты блокировочного контактного узла 11.Для интенсивного гашения эл. Дуги служит дугогасительная камера 12.
23. Назначение:
Кнопки управления предназначены для оперативного управления магнитными пускателями, контакторами и реле автоматики в электрических цепях переменного тока частотой 50Гц, напряжением до 660В или постоянного тока напряжением до 400В.
Описание:
Кнопки управления состоят из быстросъемной головки и контактного модуля. Контактная группа черного цвета — замыкающая (1з), коричневого — размыкающая (1р).
Устанавливают кнопки управления в стандартные отверстия диаметром 22,3 мм на жесткой металлической панели, защищенной от прямых солнечных лучей, попадания струй дождя и химических реагентов. Для предотвращения попадания жидкости внутрь механизма кнопки управления снабжены резиновыми уплотнительными кольцами.
Подключение подводящих проводников производят через винтовые зажимы с тарельчатыми шайбами.
24. Плавкий предохранитель — компонент силовой электроники одноразового действия, выполняющий защитную функцию. В электрической цепи плавкий предохранитель является слабым участком электрической цепи, сгорающий в аварийном режиме, тем самым разрывая цепь и предотвращая последующее разрушение высокой температурой[1]. Минимальный ток перегрузки, при котором произойдёт гарантированное сгорание плавкой вставки составляет 1,6 от номинального тока: например, предохранитель номинальным током 10 ампер гарантированно сгорит при токе выше 16 ампер[2].
Плавкий предохранитель состоит из двух основных частей: корпуса (патрона) из электроизоляционного материала и плавнкой вставки. Концы плавкой вставки соединены с клеммами, с помощью которых предохранитель включается в линию последовательно с защищаемым потребителем или участком цепи. Плавкая вставка выбирается с таким расчетом, чтобы она плавилась раньше, чем температура проводов линии достигнет опасного уровня или перегруженный потребитель выйдет из строя.
По конструктивным особенностям различают пластинчатые, патронные, трубочные и пробочные предохранители. Сила тока, на который рассчитана плавкая вставка, указывается на ее корпусе. Оговаривается также максимально допустимое напряжение, при котором может использоваться предохранитель.
Основной характеристикой плавкой вставки является зависимость времени ее перегорания от тока (рис.1). Эта кривая снимается экспериментально: берется партия одинаковых предохранителей, которые последовательно пережигаются при разных токах. Замеряются время, по истечении которого вставка перегорает, и ток, проходящий через вставку. Каждому току соответствует определенное время перегорания вставки. По этим данным и строится временная характеристика.
24. Плавкий предохранитель
простейшее устройство для защиты электрических цепей и потребителей электрической энергии от перегрузок и токов короткого замыкания. П. п. состоит из одной или нескольких плавких вставок, изолирующего корпуса и выводов для присоединения плавкой вставки к электрической цепи. Некоторые П. п. наполняют кварцевым песком для лучшего охлаждения плавкой вставки и гашения дуги; иногда П. п. имеют индикаторы срабатывания. Плоские вставки имеют зауженные участки, которые расплавляются в первую очередь. П. п. включается последовательно в электрическую цепь и при расплавлении вставки размыкает её.
24.Плавкий предохранитель –аппарат автоматически отключающий электрическую цепь при коротком замыкании. Цепь отключается при расплавлении плавкой вставки которая нагревается непосредственно током защищаемой цепи. Плавкие предохранители FU включаются в каждую линию питающей двигатель сети между выключателем Q напряжения сети и контактами линейного контактора КМ для асинхронного двигателя и для двигателя постоянного тока. Выбор плавкой вставки предохранителей силовой части электропривода производится по току, который расчитывается таким образом, чтобы при пуске двигателя она не перегорала от пускового тока.
Рекомендуемые страницы:
Воспользуйтесь поиском по сайту:
Lecture_10
ЛЕКЦИЯ 10
Управление трехфазным асинхронным двигателем:
напряжением, реостатное и частотно-токовое
Управление напряжением
При управлении напряжением изменяются действующие значения фазных напряжений обмотки статора. Согласно формуле (9.7) электромагнитный момент пропорционален квадрату напряжения. Семейство механических характеристик показано на рис. 10.1. Достоинством этого метода является простота схемы управления. К недостаткам относится то, что характеристики расположены неравномерно из-за квадратичной зависимости. Далее, при малом напряжении жесткость механической характеристики мала. Наконец, диапазон регулирования скорости вращения узкий – от номинальной до критической скорости.
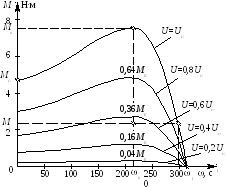
Рис. 10.1. Механические характеристики асинхронного
двигателя при управлении напряжением.
Реостатное управление
Реостатное управление возможно у двигателей с фазным ротором. Трехфазная обмотка ротора такого двигателя выполняется медным изолированным проводом и подключена к трем контактным кольцам, установленным на валу. К этим кольцам прижаты три комплекта щеток, соединенных с трехфазным пусковым или регулировочным реостатом.
Из формулы для электромагнитного момента (9.7) следует, что момент М зависит от отношения r2‘/s, а при наличии реостата в цепи ротора – от отношения (r2‘ + rр‘)/s. Например, если суммарное активное сопротивление в фазе ротора и скольжение увеличить в два раза, то электромагнитный момент не изменится. При увеличении скольжения s возрастает частота скольжения ω2 = sω1, а скорость вращения ω = ω1 – ω2уменьшается.
Семейство механических характеристик при реостатном управлении показано на рис. 10.2. Видно, что все характеристики имеют одинаковый критический момент, а при увеличении сопротивления реостата характеристика смещается в сторону меньшей скорости.
Достоинством реостатного управления является снижение тока при малых скоростях вращения ротора и увеличение пускового момента. Это явление можно объяснить по формуле (9.1). При увеличении сопротивления реостата rр величина тока I2 уменьшается, а его активная составляющая I2 cosφ2 возрастает.
Вторым достоинством является широкий диапазон регулирования скорости вращения (от номинальной до нуля).
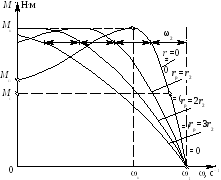
Рис. 10.2. Механические характеристики асинхронного
двигателя при реостатном управлении
Недостатки реостатного управления: наличие щеточного контакта, сложность конструкции, дороговизна; в реостате выделяется мощность в виде тепла, что снижает КПД; с увеличением сопротивления реостата снижается жесткость механической характеристики.
Недостатки реостатного управления: наличие щеточного контакта, сложность конструкции, дороговизна; в реостате выделяется мощность в виде тепла, что снижает КПД; с увеличением сопротивления реостата снижается жесткость механической характеристики.
Реостат в цепи фазного ротора асинхронного двигателя используется для уменьшения пускового тока и для увеличения пускового момента.
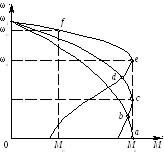
Рис. 10.3. Пуск асинхронного двигателя с помощью реостата
На рис. 10.3 показаны три механические характеристики. Характеристика с участком d—e—f является естественной, сопротивление пускового реостата здесь равно нулю. Механическая характеристика с участком b—c—d – искусственная с сопротивлением реостата rр‘. Механическая характеристика с участком a—b – искусственная с сопротивлением реостата rр» > rр‘. Видно, что пусковой момент на этой характеристике равен критическому моменту Мк.
Рассмотрим последовательность действий для разгона двигателя до номинальной скорости за минимальное время. На обмотку статора подается номинальное напряжение питания при сопротивлении реостата rр». В начальный момент пуска двигатель развивает максимальный момент Mк. Происходит разгон двигателя от точки a до точки b.
Теперь пусковой реостат переключается с сопротивления rр» на сопротивление rр‘. Ток ротора I2 быстро нарастает, но косинус угла сдвига по фазе cosφ2 уменьшается. В результате рабочая точка остается на месте.
Далее происходит разгон двигателя от точки b через точку с до точки d. Теперь пусковой реостат переключается с сопротивления rр‘ на нулевое сопротивление. Далее происходит разгон двигателя по естественной характеристике из точки d через точку e в точку f. Это номинальный режим работы.
Частотно-токовое управление асинхронным двигателем
с помощью зависимого инвертора частоты
Номинальная скорость вращения трехфазного асинхронного двигателя близка к синхронной скорости, а номинальное скольжение составляет 3-5 %. Это связано с тем, что электромагнитный момент создается активной составляющей тока ротора, которая уменьшается при увеличении скольжения из-за увеличения индуктивного сопротивления обмотки ротора. Если скорость вращения нужно менять в широких пределах, то целесообразно изменять частоту питания согласно формуле
 (10.1)
(10.1)
где  оптимальная частота скольжения, а ω –
скорость вращения ротора.
оптимальная частота скольжения, а ω –
скорость вращения ротора.
Электромагнитный момент определяется формулой
где в числителе имеется квадрат напряжения фазы U1, а в знаменателе в квадратных скобках – квадрат продольного сопротивления схемы замещения фазы асинхронного двигателя. Частное от деления указанных величин дает квадрат тока фазы статора, т.е. справедливы соотношения
 (10.2)
(10.2)
Формулы (10.1), (10.2) показывают, что при изменении скорости вращения ротора надо менять частоту питания, а при изменении требуемого электромагнитного момента – ток фазы статора. Этим и объясняется термин »частотно-токовое управление».
На рис. 10.4 показана функциональная схема асинхронного электропривода с частотно-токовым управлением. Электропривод имеет двухфазный асинхронный двигатель АД, датчик частоты вращения (тахогенератор) ДЧВ, задатчик частоты скольжения ЗЧС, идентификатор знака момента ИЗМ, устройство извлечения корня УИК, сумматор С, перемножители П1 – П3, интегратор И, функциональный преобразователь ФП, два усилителя тока УТ1, УТ2, объект управления ОУ.
Ротор двигателя механически связан с объектом управления ОУ и с ротором датчика частоты вращения ДЧВ, который вырабатывает сигнал, пропорци-
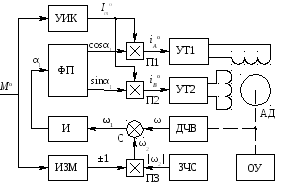
Рис. 10.4. Функциональная схема электропривода
с двухфазным асинхронным двигателем
ональный частоте вращения ротора ω. На
выходе задатчика частоты скольжения
ЗЧС формируется сигнал, пропорциональный
модулю оптимальной частоты скольжения  .
Он приходит на первый вход перемножителя
П3.
.
Он приходит на первый вход перемножителя
П3.
Входной сигнал электропривода, пропорциональный требуемому электромагнитному моменту Мо, приходит на вход идентификатора знака момента ИЗМ, формирующий сигнал знака момента, равный 1 или –1. Этот сигнал перемножается на перемножителе П3 с модулем оптимальной частоты скольжения |ω2|, и на выходе получается частота скольжения ω2. Она суммируется на сумматоре С с частотой вращения ротора ω, поступающей от датчика частоты вращения ДЧВ. На выходе сумматора С получается частота вращения магнитного поля ω1.
Если требуемый электромагнитный момент Мо положительный, то магнитное поле должно вращаться быстрее, чем ротор, и ω2 > 0. Если же момент Мо отрицательный, то магнитное поле должно вращаться медленнее ротора, или должно вращаться относительно ротора в отрицательном направлении, т.е. должно выполняться неравенство ω2 < 0. Этим объясняется необходимость определения знака момента.
Интегратор И выдает сигнал, пропорциональный углу α1 поворота магнитного потока Ф. Этот сигнал приходит на вход функционального преобразователя ФП, формирующего сигналы cos1 и sin1. Они поступают на входы перемножителей П1 и П2. На выходе устройства извлечения корня УИК формируется сигнал, пропорциональный амплитуде системы токов статора:
Этот сигнал приходит на вторые входы перемножителей П1, П2, на выходах которых формируются требуемые значения токов обмотки статора:
Эти значения приходят на входы усилителей тока УТ1 и УТ2. Они представляют собой усилители напряжения, охваченные глубокой отрицательной обратной связью по току нагрузки с помощью датчиков тока. Эти усилители питают фазы обмотки статора асинхронного двигателя токами, близкими к требуемым значениям:

Асинхронный двигатель развивает требуемый момент
M ≈ Mo
при рациональном токе и частоте скольжения, что обеспечивает высокий КПД и энергосбережение в широком диапазоне изменения частоты вращения и электромагнитного момента.
В случае асинхронного двигателя с трехфазной обмоткой на статоре функциональный преобразователь должен формировать три функции:
sinα1, sin(α1 – 2π/3), sin(α1 – 4π/3),
поступающие на входы трех перемножителей, а фазы обмотки статора питаются от трех усилителей тока.
Вопросы для самопроверки
1. Отметить достоинства и недостатки управления асинхронного двигателя напряжением.
2. Отметить достоинства и недостатки реостатного управления асинхронным двигателем.
3. Почему при введении реостата в цепь ротора ток уменьшается, а электромагнитный момент возрастает?
4. Почему для быстрого разгона переключение пускового реостата производится в точках пересечения механических характеристик?
5. Почему при переключении пускового реостата в точках b, d ток в обмотке ротора возрастает, а момент сохраняется?
6. Объясните необходимость изменения частоты питания при изменении частоты вращения ротора двигателя.
7. Зачем нужно изменять величину токов обмотки статора при изменении требуемого момента?
8. Почему изменяется знак частоты скольжения при смене знака момента?
9. Как определяется частота питающих напряжений?
10. Зачем нужен сдвиг по фазе между токами фаз A и B?
11. Нарисуйте функциональную схему асинхронного электропривода с частотно-токовым управлением при трехфазной обмотке двигателя.
Расчет и выбор резисторов для асинхронного двигателя с фазным ротором
В автоматизированном электроприводе для решения определенных задач часто применяются асинхронные двигатели с фазным ротором. Несмотря на более сложную конструкцию и повышенную стоимость по сравнению с АД с короткозамкнутым ротором, этот двигатель позволяет достаточно просто реализовать регулирование частоты вращения, ограничение и регулирование тока и момента. Изменение этих координат электропривода осуществляется путем введения дополнительных резисторов (чаще всего активных) в цепи обмотки фазного ротора.
Длительное регулирование частоты вращения таким способом энергетически нецелесообразно, т.к. при малых скольжениях большая часть потребляемой двигателем электроэнергии расходуется на нагрев реостатов в цепи ротора. Как правило, АД с фазным ротором применяется так, чтобы включение резисторов было по возможности кратковременным, например, где по условиям работы электропривода требуется получить необходимые пускорегулировочные характеристики. При этом такой АД почти всегда работает с комплектом добавочных резисторов для изменения сопротивления цепи фазного ротора. От правильного выбора резисторов зависит работа двигателя на искусственных характеристиках (их величина определяет форму механических и электромеханических характеристик) и его тепловая загрузка (эти сопротивления ограничивают токи в обмотках АД в переходных режимах).
Таким образом, расчет и выбор резисторов напрямую связан с подбором необходимого АД с фазным ротором для соответствующих систем автоматизированного электропривода. При этом выбор АД по мощности проводится по методике, изложенной в задаче 1, а, в случае необходимости, допустимое число включений определяется при использовании алгоритма, представленного в задаче 2 настоящих методических указаний.
За номинальные параметры резисторов принимаются: сопротивление, напряжение, ток и продолжительность включения. Соответственно, для включения резисторов в цепь обмотки фазного ротора необходимо учитывать напряжение EРНи ток в обмотке ротора I2Н. Основные характеристики АД с фазным ротором представлены в Приложении 2, Табл. 3, 4 соответственно при ПВН = 40% и ПВН = 25%.
Переключение ступеней резисторов при регулировании координат осуществляется с помощью серийных контроллеров, тип которых выбирается в зависимости от параметров электропривода. Для электроприводов переменного тока применяются силовые кулачковые контроллеры типа ККТ60А и его модификации, предназначенные для применения в конкретных системах электропривода:
- ККТ61А, при коммутации в цепях обмоток статора и ротора, схема включения контактов симметричная, регулирование частоты вращения неустойчивое до 1:3;
- ККТ68А, при коммутации в цепи обмотки ротора, схема включения контактов симметричная, регулирование частоты вращения неустойчивое до 1:2;
- ККТ62А, при коммутации в цепях обмоток ротора двух АД, схема включения контактов симметричная, регулирование частоты вращения неустойчивое до 1:3.
Кулачковые контроллеры используются при напряжениях до 500 В и мощности АД до 30 кВт. Они имеют до 12 силовых контактов на номинальные токи до 63 А и маломощные контакты для коммутации цепей управления. Управление переключением осуществляется вручную, число позиций рукоятки (маховика) — до 6 положений в одну сторону от нулевого (среднего) положения.
Наиболее широкое применение в современном электроприводе (крановый, экскаваторный и т.д.) получили магнитные контроллеры, которые представляют собой сложные комплектные коммутационные устройства, обеспечивающие ряд программ переключений в главных цепях с помощью контакторов с электромагнитным приводом путем подачи оператором соответствующих команд по цепям управления. Магнитные контроллеры предназначены для пуска, регулирования частоты вращения, торможения, реверса и отключения электродвигателя. Они имеют преимущества по сравнению с кулачковыми контроллерами:
- для управления магнитным контроллером независимо от мощности привода используются командконтроллеры или кнопочные станции, требующие минимальные затраты энергии оператора;
- износостойкость в 5-8 раз выше, чем у кулачковых контроллеров за счет коммутации осуществляемой контакторами;
- большой запас по коммутации, способны пропускать без повреждений ток до 15 IН на время срабатывания защиты;
- в связи с заранее запрограммированной системой пуска и торможения возможность недопустимой перегрузки сведена к минимуму;
- применение магнитного контролера по сравнению с кулачковым позволяет повысить степень автоматизации электропривода и тем самым производительность рабочей машины или механизма.
Магнитные контроллеры типа ТА, ТСА, ТСД, ДТА относятся к контроллерам переменного тока общего назначения. Они отличаются своими функциональными возможностями. Например, ТСД обеспечивает регулирование скорости 1:8, а остальные типы контроллеров не имеют гарантированного регулирования скорости электропривода (фактически могут обеспечить регулирование 1:3).
Для механизмов с высокой степенью использования применяются магнитные контроллеры серий К, КС, ДКС, в которых применяются контакторы с электромагнитным приводом постоянного тока. Они могут обеспечить фактическое регулирование скорости 1:3.
Область применения того или иного типа магнитного контроллера определяют характеристики электропривода и АД, в фазах обмотки ротора которого производятся соответствующие переключения ступеней сопротивлений. В Приложении 2 Табл. 5 представлены характеристики магнитных контроллеров с предельным током в обмотке ротора до 160 А. Для каждой ступени переключения в числители указывается относительное значение сопротивлений, %, а в знаменателе — токовая нагрузка, %. Кроме того, определяется допустимый ток ротора, который задает диапазон применения контроллера и рабочие ступени резистора.
При проектировании контроллеров сопротивления ступеней резисторов рассчитываются по известным методам теории электропривода [1,2,3].
В электроприводе применяются элементы резисторов четырех конструктивных исполнений:
- с рассеиваемой мощностью 25-150 Вт и сопротивлением от 1 до 30 000 Ом типа ПЭВ, представляющие собой фарфоровые цилиндры, на которые навита нихромовая проволока и которые покрыты нагревостойкой стекловидной эмалью;
- с рассеиваемой мощностью 250-400 Вт и сопротивлением от 0,7 до 96 Ом, выполненные в виде плоских элементов с константановой, фехралевой или нихромовой проволоки диаметром от 0,5 до 1,6 мм, намотанной на фарфоровые изоляторы, закрепленные на металлическом держателе;
- с рассеиваемой мощностью 850 — 1000 Вт и сопротивлением от 0,078 до 0,154 Ом из фехралевой ленты размерами от 0,8×6 до 1,6×1,5 мм, намотанной на ребро. Лента в виде спирали надета на фарфоровые изоляторы, опирающиеся на металлический держатель коробчатого сечения;
- с рассеиваемой мощностью 115-230 Вт при соответствующем токе 55 и 215 А и сопротивлением от 0,005 до 0,28 Ом из чугунных элементов типа НС400 и НС401.
Сопротивления для АД с фазным ротором выполняются в виде отдельных элементов или, чаще всего, блоков резисторов. При мощности электропривода до 300 кВт блоки составляются из элементов первых трех конструкций. Во всех остальных случаях (мощность ЭП до нескольких тысяч кВт) применяются ящики резисторов типа ЯС100, ЯС101 с чугунными элементами.
Для рассматриваемого типа электропривода применяются стандартные блоки резисторов типа БФ 6 и BK 12, а так же отдельные элементы, специально рассчитанные для использования совместно с конкретными двигателями постоянного или переменного тока. Блоки БФ 6 выполняются в виде 6 элементов из фехралевой ленты, а БК 12 — из 12 проволочных фехралевых или константановых элементов. Данные по нормализованным блокам резисторов представлены в Приложении 2, Табл. 6, 7.
Технические данные отдельных элементов представляют как ток продолжительного режима работы, так и ток повторно-кратковременного режима с ПВН =12,5;25;35%. Для блоков резисторов определен только ток продолжительного режима работы, при ПВН=100%. Чаще всего в типовом электроприводе для АД используются именно резисторные блоки.
В реальном процессе резисторы на каждой ступени работают со своей продолжительностью включения. Поэтому для того, чтобы они нагревались до допустимой температуры, их следует использовать при большем токе нагрузки.
При расчетном токе IР резистор, работающий в повторно-кратковременном режиме, следует выбирать на эквивалентный по перегреву длительный ток:
IЭ = KIР.
где К < 1, и значение К определяется в общем случае по универсальным справочным кривым в зависимости от режима работы. Этот коэффициент зависит от времени работы резистора за цикл и продолжительности его включения. Чем они меньше, тем ниже значение коэффициента, и, следовательно, тем на меньше значение тока нужно выбирать резистор.
В общем случае расчетный ток резистора определяется:
IР = I2Н , А,
где PР — расчетная мощность привода, зависящая от системы электропривода, его режима работы и параметров нагрузки, кВт; I2Н — номинальный ток ротора, А; PН — номинальная мощность электродвигателя, кВт.
Чаще всего, при известной системе электропривода тип панели управления уже определен и по относительным значениям сопротивлений для каждой ступени (RРn—Рm) вычисляется их омическая величина (в одной фазе):
RРn-Pm =RН , Ом
где Rcmyn,%— определено для каждой ступени панели управления; RН — номинальное сопротивление обмотки ротора, Ом.
RН = ,
где EРН — номинальное напряжение ротора, В.
Для выбора резисторов необходимо определить значения расчетных токов по ступеням. Для этого первоначально определяем среднюю мощность потерь в резисторах (в трех фазах), кВт:
для торможения противовключением
РР,Т = ,
для динамического торможения
РР,Т = ,
в которых мощность статической нагрузки РСТ, кВт
РСТ = МСТпH / 9550,
ηЭКВ = ,
где ηЭКВ,Б — эквивалентный базовый КПД, определяется системой электропривода, для асинхронного электропривода с АД с фазным ротором при торможении противовключением он равен 0,76, при динамическом торможении — 0,81;
kТ — коэффициент нагрузки, зависит от режима работы и выбранной системы электропривода для асинхронного электропривода с АД с фазным ротором при соотношении J/(1,2JД)>5 и торможении противовключением он равен 0,65, при динамическом торможении — 0,85, соответственно при J/(1,2JД)<5: противовключение — 1,2, динамическое торможение — 1,3;
ηЭКВN — КПД, зависит от продолжительности включения, типа электропривода и способа торможения. Для ПВН = 40%:при торможении противовключением — 0,72, при динамическом — 0,76; для ПВН = 25% соответственно — 0,68 и 0,71; при длительном режиме работы (ПВН = 100%) ηЄКВ,Б = ηЄКВN.
J — приведенный момент инерции, кг · м2;
МС — момент нагрузки, Н · м;
ɛ = ПВН/100, о.е. — коэффициент включения АД;
а — коэффициент использования привода, для общих механизмов а=1;
nMAX — максимальная частота вращения, для асинхронных двигателей это синхронная частота вращения, n1, об/мин;
nБАЗ — базовая частота вращения, nБАЗ = 1000 об/мин;
паспортные значения АД — коэффициент полезного действия ηДВ, о.е., номинальная частота вращения ηН, об/мин, момент инерции JД, кг · м2, продолжительность включения ПВН, % (Приложение 2, Табл. 3, 4)
При симметричной схеме включения резисторов в фазы обмотки ротора, мощность приходящаяся на одну фазу, кВт
РР,Тф = PР,Т / 3.
Далее определяется расчетный тепловой ток резистора, А
IР,Т =
где R% и I% — относительные значения сопротивления ступени и тока нагрузки, %, определяемые по используемому типу магнитного контроллера.
Для каждой ступени резистора вычисляется расчетное значение теплового тока, А
IРn—Pm = IP.T.
По найденным расчетным значениям сопротивлений и токов по ступеням резистора определяются необходимые блоки резисторов, разрабатываются схемы соединений элементов блока для получения требуемых сопротивлений и токов. Основными требованиями при подборе являются:
- длительный ток в реостате ступени должен быть больше или равен соответствующему расчетному тепловому току;
- выбранное сопротивление не должно отличаться от расчетного в «+» — на 15%, в «-» — на 10%;
Расчет и выбор сопротивлений проводится для одной фазы. При симметричном сопротивлении в цепи ротора, в двух других фазах резисторы и схемы соединения элементов будут аналогичны.
17 Пуск двигателя с фазным ротором с помощью пускового реостата » СтудИзба
Пуск двигателя с фазным ротором с помощью пускового реостата.
Двигатели с фазным ротором применяются значительно реже двигателей с короткозамкнутым ротором. Они используются в следующих случаях:
1) когда двигатели с короткозамкнутым ротором неприемлемы по условиям регулирования их скорости вращения;
2) когда статический момент сопротивления на валу при пуске Мст велик и поэтому асинхронный двигатель с короткозамкнутым ротором с пуском при пониженном напряжении неприемлем, а прямой пуск такого двигателя недопустим по условиям воздействия больших пусковых токов на сеть;
3) когда приводимые в движение массы настолько велики, что выделяемая во вторичной цепи двигателя тепловая энергия вызывает недопустимый нагрев обмотки ротора в виде беличьей клетки.
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора. Применяются проволочные, с литыми чугунными элементами, а также жидкостные реостаты. По условиям нагрева реостаты рассчитываются на кратковременную работу. Сопротивления металлических- реостатов для охлаждения обычно помещают в бак с трансформаторным маслом. Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически (в автоматизированных установках) с помощью контакторов или контроллера с электрическим приводом. Жидкостный реостат представляет собой сосуд с электролитом (например, водный раствор соды или поваренной соли), в который опущены электроды.
Сопротивление реостата регулируется путем изменения глубины погружения электродов.
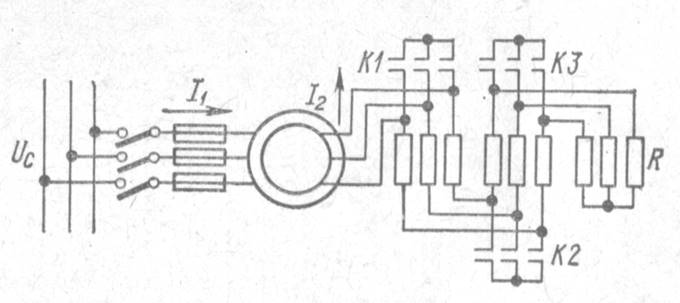
Рассмотрим пуск двигателя с фазным ротором с помощью ступенчатого металлического реостата, управляемого контакторами К.
Перед пуском щетки должны быть опущены на контактные кольца ротора, а все ступени реостата включены. Далее в процессе пуска поочередно включаются контакторы КЗ, К.2, К1. Характеристики вращающего момента двигателя М = f (s) и вторичного тока I2=f (s) при работе на разных ступенях реостата изображены на рис.
Предположим, что сопротивления ступеней пускового реостата и интервалы времени переключения ступеней подобраны так, что момент двигателя М при пуске меняется в пределах от некоторого Ммакс до некоторого Ммин и при включении в сеть  (кривая 3 на рис.а). В начале пуска двигатель работает по характеристике 3, ротор приходит во вращение, скольжение s начинает уменьшаться, и при s=s3, когда М=Mмин, производится переключение реостата на вторую ступень. При этом двигатель будет работать по характеристике 2, и при дальнейшем разбеге двигателя скольжение уменьшится от s=s3,, до s=s2, а момент — от значения М = Ммаксдо М = Ммин. Затем производится переключение на первую ступень и т. д. После выключения последней
(кривая 3 на рис.а). В начале пуска двигатель работает по характеристике 3, ротор приходит во вращение, скольжение s начинает уменьшаться, и при s=s3, когда М=Mмин, производится переключение реостата на вторую ступень. При этом двигатель будет работать по характеристике 2, и при дальнейшем разбеге двигателя скольжение уменьшится от s=s3,, до s=s2, а момент — от значения М = Ммаксдо М = Ммин. Затем производится переключение на первую ступень и т. д. После выключения последней
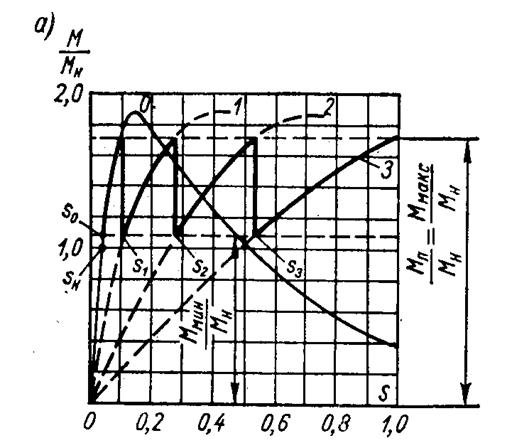
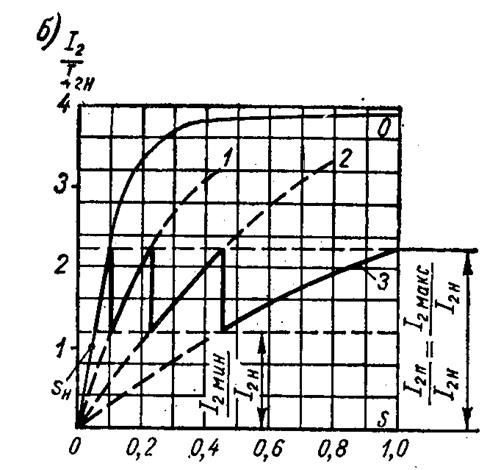
ступени реостата двигатель переходит на работу по естественной характеристике 0 и достигает установившейся скорости вращения.
 При наличии у двигателя короткозамыкающего механизма после окончания пуска щетки с помощью этого механизма поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается в пусковое положение. Тем самым пусковая аппаратура приводится в готовность к следующему пуску. Необходимо отметить, что дистанционное управление короткозамыкающим механизмом контактных колец сложно осуществить; это затрудняет автоматическое управление двигателем. Поэтому в последнее время фазные асинхронные двигатели строятся без таких механизмов. При этом щетки постоянно налегают на контактные кольца, что несколько увеличивает потери двигателя и износ щеток. Количество ступеней пускового реостата с целью упрощения схемы пуска и удешевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2—3 ступени).
При наличии у двигателя короткозамыкающего механизма после окончания пуска щетки с помощью этого механизма поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается в пусковое положение. Тем самым пусковая аппаратура приводится в готовность к следующему пуску. Необходимо отметить, что дистанционное управление короткозамыкающим механизмом контактных колец сложно осуществить; это затрудняет автоматическое управление двигателем. Поэтому в последнее время фазные асинхронные двигатели строятся без таких механизмов. При этом щетки постоянно налегают на контактные кольца, что несколько увеличивает потери двигателя и износ щеток. Количество ступеней пускового реостата с целью упрощения схемы пуска и удешевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2—3 ступени).
Пусковые характеристики асинхронного двигателя при реостатном пуске наиболее благоприятны, так как высокие значения моментов достигаются при невысоких значениях пусковых токов.
Пуск асинхронного двигателя с фазным ротором с помощью пускового реостата.
Применяется для двигателей 1 с фазным ротором (рис. 265, а). Пусковой реостат 2 обычно имеет четыре — шесть ступеней, что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление Rп, поддерживая высокое значение пускового момента на все время, разгона двигателя. При пуске предварительно устанавливают пусковой реостат в положение, при котором он имеет максимальное
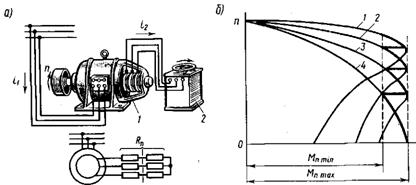
По мере увеличения частоты вращения ротора вращающий момент двигателя, как видно из его механической характеристики, уменьшается и может стать меньше некоторого момента Mпmin. Поэтому при уменьшении вращающего момента до Mпmin часть сопротивления пускового реостата выводят. При этом вращающий момент двигателя возрастает до Mпmax, а затем с увеличением частоты вращения будет изменяться по характеристике 3, полученной при сопротивлении пускового реостата Rп3 < Rп4. При дальнейшем уменьшении вращающего момента до Mпmin часть сопротивления реостата снова выключается, и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению Rп2 < Rп3.
Таким образом, в процессе пуска двигателя сопротивление пускового реостата постепенно (ступенями) уменьшают и вращающий момент двигателя изменяется в пределах от Mпmax до Mпmin по ломаной кривой, показанной на рис. 265, б жирной линией. В конце пуска пусковой реостат полностью выводят, обмотка ротора двигателя замыкается накоротко и двигатель переходит на работу по естественной характеристике 1. Отдельные ступени пускового реостата в процессе разгона двигателя могут выключаться вручную или автоматически. Таким образом, путем включения реостата в цепь обмотки ротора можно осуществить пуск двигателя при Mп ?Mпmax и резко уменьшить пусковой ток.
Мягкий» пуск асинхронного двигателя с помощью тиристорного регулятора напряжения.
При подаче сигнала «Пуск» система управления автоматически изменяет угол управления тиристорами силовых блоков, за счет чего ток двигателя плавно нарастает до значения, необходимого для трогания двигателя и связанного с ним механизма. Это значение пускового тока стабилизируется, и двигатель разгоняется с фиксированным значением пускового тока. В зависимости от скорости для большинства механизмов этот ток составляет (1,5…4) Iном. Для механизмов с «вентиляторной» нагрузкой пусковой ток может иметь линейно-нарастающую зависимость от времени пуска.
При увеличении скорости двигателя до значения близкого к номинальному двигатель выходит на свою рабочую характеристику, и пусковой ток уменьшается до величины, определяемой фактической нагрузкой двигателя. Система управления при этом полностью открывает тиристоры силовых блоков, и на двигатель подается полное напряжение питающей сети.
После окончания отсчета времени или по спаду тока устройство выдает команду «Окончание разгона», разрешающую включение рабочего выключателя, который перехватывает ток нагрузки на себя. Получив команду «Контроль шунтирования», устройство снимает импульсы управления с тиристоров, запирая тиристоры силовых блоков, а также разрывает их цепи управления. Далее выдается команда «Окончание пуска», и происходит отключение пусковой и головной ячеек. Процесс пуска заканчивается. Повторный запуск возможен при повторной подаче команды «Пуск».
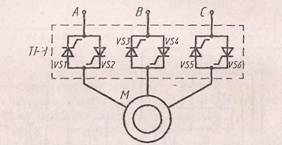 Рис. 2.19 Схема пуска трехфазного асинхронного электродвигателя с помощью тиристорного регулятора напряжения (ТРН).
Рис. 2.19 Схема пуска трехфазного асинхронного электродвигателя с помощью тиристорного регулятора напряжения (ТРН).
Схема включения двигателя с помощью тиристорного регулятора напряжения представлена на рис. 2.19.
В регуляторе напряжения в каждый фазный провод включаются встречно-параллельно два тиристора, один из которых работает условно в положительный полупериод напряжения сети, а другой в отрицательный.
Применение Устройства Плавного Пуска также позволяет снизить нагрузку на электросеть, поскольку в этом случае пусковой ток электродвигателя составляет 2 – 4 номинала тока двигателя, а не 5 – 7 номиналов, как при непосредственном пуске. Это важно при питании электроустановок от источников энергии ограниченной мощности, например, дизель-генераторных установок, источников бесперебойного питания и трансформаторных подстанций малой мощности
(особенно в сельской местности). После завершения пуска тиристоры шунтируются байпасом (обходным контактором) К, благодаря чему в течение времени Траб на тиристорах не рассеивается мощность, а значит, экономится электроэнергия.
Регулирование напряжения на выходе регулятора осуществляется изменением времени включения каждого тиристора относительно момента, когда ток должен переходить с одного из трех тиристоров на другой (базовая точка), путем подачи на тиристор управляющего импульса, что дает возможность изменять время протекания тока через тиристор в течение полупериода напряжения сети и напряжение на его выходе, подаваемое на нагрузку, в
Данном случае на двигатель. Это напряжение не является синусоидальным, и его можно представить, как среднее напряжение, которое можно менять, изменяя продолжительность работы тиристора в течение полупериода. Время включения тиристора относительно базовой точки выражается в градусах и называется углом регулирования. Изменяя угол регулирования тиристоров, можно получить необходимое напряжение для плавного пуска двигателя.
77. Отключение асинхронного двигателя от сети.
Трехфазные электродвигатели при случайном отключении одной из фаз быстро перегреваются и выходят из строя, если их вовремя не отключить от сети. Поэтому были разработаны различные системы автоматических защитных отключающих устройств, однако они либо сложны, либо недостаточно чувствительны.
Первый способ
Это самый распространенный способ, проверенный временем. Защита двигателя от отключения одной фазы обеспечивается применением теплового реле ТЗ. Смысл этой защиты состоит в том, что постоянная нагревания теплового реле подбирается таким же образом, что и постоянная нагревания электродвигателя. То есть, проще говоря, реле нагревается так же, как и двигатель. И при превышении температуры выше допустимой реле отключает двигатель. При отключении одной фазы ток через другие фазы резко возрастает, двигатель и тепловое реле начинают быстро нагреваться, что вызывает срабатывание теплового реле. Способ хорош и тем, что обеспечивает и защиту двигателя от перегрузки и пробоя одной фазы на корпус. Но для надежной защиты от пробоя на корпус двигатель обязательно должен быть заземлен или занулен. Недостаток этого способа в том, что его нужно достаточно точно подбирать и настраивать. В идеале его номинальный ток должен быть такой же, как и у двигателя.
ВТОРОЙ СПОСОБ
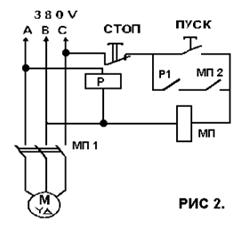
Второй способ защиты трехфазных асинхронных электродвигателей.
В обычную систему запуска трехфазного двигателя введено дополнительное реле Р с нормально разомкнутыми контактами Р1. При наличии напряжения в трехфазной сети обмотка дополнительного реле Р постоянно находится под напряжением и контакты Р1 замкнуты. При нажатии кнопки «Пуск» через обмотку электромагнита магнитного пускателя МП проходит ток, и системой контактов МП1 электродвигатель подключается к трехфазной сети. При случайном отключении от сети провода А реле Р будет обесточено, контакты Р1 разомкнутся, отключив от сети обмотку магнитного пускателя, который системой контактов МП1 отключит двигатель от сети. При отключении от сети проводов В и С обесточивается непосредственно обмотка магнитного пускателя. В качестве дополнительного реле Р используется реле переменного тока типа МКУ-48.
ТРЕТИЙ СПОСОБ
Третий способ защиты трехфазных асинхронных электродвигателей.
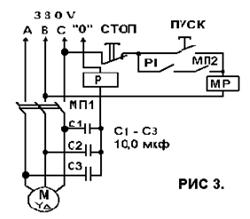
Защитное устройство основано на принципе создания искусственной нулевой точки (точка 1′), образованной тремя одинаковыми конденсаторами С1-С3. Между этой точкой и нулевым проводом 0′ включено дополнительное реле Р с нормально замкнутыми контактами. При нормальной работе электродвигателя напряжение в точке 0′ равно нулю, и ток через обмотку реле не протекает. При отключении одного из линейных проводов сети нарушается электрическая симметрия трехфазной системы, в точке 0′ появляется напряжение, реле Р срабатывает и контактами Р1 обесточивает обмотку магнитного пускателя — двигатель отключается. Это устройство обеспечивает более высокую надежность по сравнению с предыдущим. Реле типа МКУ — на рабочее напряжение 36 В. Конденсаторы С1-С3 — бумажные, емкостью 4-10 мкф, на рабочее напряжение не ниже удвоенного фазного. Чувствительность устройства настолько высока, что иногда двигатель может отключиться в результате нарушения электрической симметрии, вызванного подключением посторонних однофазных потребителей, питающихся от этой сети. Чувствительность можно понизить, применив конденсаторы меньшей емкости.
ЧЕТВЕРТЫЙ СПОСОБ
Четвертый способ защиты трехфазных асинхронных электродвигателей.
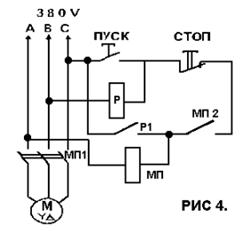
Схема защитного устройства аналогична схеме, рассмотренной во втором способе. При нажатии кнопки «Пуск» включается реле Р, контактами Р1 замыкая цепь питания катушки магнитного пускателя МП. Магнитный пускатель срабатывает и контактами МП1 включает электродвигатель. При обрыве линейных проводов В или С отключается реле Р, при обрыве провода А или С — магнитный пускатель МП. В обоих случаях электродвигатель выключается контактами магнитного пускателя МП1. По сравнению со схемой защитного устройства трехфазного двигателя, рассмотренной в первом способе, это устройство имеет преимущество: дополнительное реле Р при выключенном двигателе обесточено.
78. Конструкция и принцип действия синхронных машин (СМ).
а) Общие сведения
Синхронные электрические машины характерны тем, что у них ротор в установившемся режиме вращается с угловой скоростью вращающегося магнитного поля, создаваемого токами в фазных обмотках статора, подобного статору асинхронной машины. Это достигается тем, что ротор синхронной машины представляет собой обычно электромагнит или реже постоянный магнит с числом пар полюсов, равным числу пар полюсов вращающегося магнитного поля. Взаимодействие полюсов вращающегося магнитного поля и полюсов ротора обеспечивает постоянную угловую скорость последнего независимо от момента на валу. Это свойство синхронных машин позволяет использовать их в качестве двигателей для привода механизмов с постоянной угловой скоростью. Распространенность синхронных двигателей не столь широка, как асинхронных, но в ряде случаев, например в металлургии, их использование становится необходимым. Единичная мощность синхронного двигателя в приводах большой мощности достигает нескольких десятков мегаватт.
Основной областью применения синхронных машин является использование их в качестве промышленных генераторов для выработки электрической энергии на электростанциях.
б) Устройство синхронной машины
Основными частями синхронной машины являются статор и ротор, причем статор не отличается от статора асинхронной машины рис. 14.1). Сердечник статора собран из изолированных друг от друга пластин электротехнической стали и укреплен внутри массивного корпуса. В пазах с внутренней стороны статора размещена обмотка переменного тока, в большинстве случаев трехфазная.
Ротор синхронной машины представляет собой электромагнит — явнополюсный (рис. 15.1, где / — полюсы, 2— полюсные катушки, 3 — сердечник ротора, 4 — контактные кольца) или неявнополюсный (рис. 15.2, где / — сердечник ротора, 2 — пазы с обмоткой, 3 — контактные кольца). Ток в обмотку ротора поступает через контактные кольца и щетки от внешнего источника постоянного тока — возбудителя.
У многополюсной синхронной машины ротор имеет р пар полюсов, а токи в обмотке статора образуют тоже р пар полюсов вращающегося магнитного поля (как у асинхронной машины). Ротор должен вращаться с частотой вращения поля, следовательно, его синхронная частота вращения равна:
п = 60f/р.
П  ри стандартной промышленной частоте 50 Гц максимальная частота вращения, соответствующая двухполюсной(р = 1) машине, будет 3000 об/мин. Это частота вращения современного турбоагрегата,состоящего из первичного двигателя — паровой турбины и неявнополюсного синхронного генератора (турбогенератора).
ри стандартной промышленной частоте 50 Гц максимальная частота вращения, соответствующая двухполюсной(р = 1) машине, будет 3000 об/мин. Это частота вращения современного турбоагрегата,состоящего из первичного двигателя — паровой турбины и неявнополюсного синхронного генератора (турбогенератора).
У  гидроагрегата гидравлическая турбина вращается относительно медленно. Это вынуждает изготовлять гидрогенераторы многополюсными с явными полюсами и в большинстве случаев — вертикальным валом. Частота вращения этих генераторов — от 60 до нескольких сотен оборотов в минуту, чему соответствует несколько десятков пар полюсов. Вследствие относительно малых частот вращения генераторы к гидравлическим турбинам имеют значительно большую массу на единицу мощности — свыше 8 кг/ (кВ-А), чем генераторы к паровым турбинам— менее 2,5 кг/(кВ-А).
гидроагрегата гидравлическая турбина вращается относительно медленно. Это вынуждает изготовлять гидрогенераторы многополюсными с явными полюсами и в большинстве случаев — вертикальным валом. Частота вращения этих генераторов — от 60 до нескольких сотен оборотов в минуту, чему соответствует несколько десятков пар полюсов. Вследствие относительно малых частот вращения генераторы к гидравлическим турбинам имеют значительно большую массу на единицу мощности — свыше 8 кг/ (кВ-А), чем генераторы к паровым турбинам— менее 2,5 кг/(кВ-А).
в) Режимы работы синхронной машины
Любая синхронная машина, включенная в электрическую систему, может’ работать в режиме генератора и двигателя. Режим работы синхронной машины определяется взаимодействием магнитных полей, создаваемых токами в обмотках статора и ротора. Рассмотрим режимы работы двухполюсной машины. Наложение магнитных полей токов в фазных обмотках статора возбуждает в синхронной машине, так же как и в асинхронной, магнитное поле (см. § 14.3), вращающееся с угловой скоростью со. Приближенное распределение магнитных линий вращающегося магнитного поля в магнитопроводе синхронной машины в режимах генератора (а) и двигателя (б) показано на рис. 15.3 штриховой линией. Распределение линий вращающегося магнитного поля показывает, что приближенно его можно представить в виде вращающейся с угловой скоростью <о пары полюсов, расположенных на статоре.
А  налогичным образом магнитное поле, создаваемое током в обмотке вращающегося ротора, также можно приближенно представить в виде вращающейся пары полюсов, расположенных на роторе.
налогичным образом магнитное поле, создаваемое током в обмотке вращающегося ротора, также можно приближенно представить в виде вращающейся пары полюсов, расположенных на роторе.
Если пренебречь всеми видами потерь энергии в синхронной машине, то при отсутствии момента на валу ось полюсов ротора будет совпадать с осью полюсов статора.
Для того чтобы заставить синхронную машину, включенную в систему, работать в режиме генератора, отдавая в эту систему энергию, необходимо увеличить механический момент, приложенный первичным двигателем к валу машины. Тогда под действием возросшего вращающего момента ось магнитных полюсов ротора повернется на некоторый угол у относительно оси полюсов статора в направлении вращения (рис. 15.3, а). Так как при этом результирующее магнитное поле, создаваемое наложением магнитных полей токов в обмотках ротора и статора, изменится, то ток в обмотках статора также изменится. Взаимодействие этого тока с магнитным полем ротора создает тормозной момент, действующий на ротор. Это и означает преобразование механической мощности первичного двигателя в электрическую мощность генератора, включенного в систему. Магнитные полюсы ротора будут как бы тянуть за собой магнитные полюсы статора.
Если теперь приложить к валу машины вместо вращающего тормозной момент механической нагрузки, то ось полюсов ротора повернется на некоторый угол относительно оси полюсов статора против направления вращения (рис. 15.3,6). Вновь возникнут токи в обмотках статора и создадут электромагнитные силы взаимодействия токов статора и магнитного поля ротора, но на этот раз эти силы будут стремиться увлечь ротор в направлении вращения. Электромагнитные силы создадут теперь вращающий момент, при посредстве которого электрическая энергия сети преобразуется в механическую на валу машины; таким путем синхронная машина переходит? в режим двигателя.
Режим работы синхронной машины изменяется от генераторного на двигательный и обратно в зависимости от механического воздействия на вал машины, причем электромагнитные силы играют роль своеобразной упругой связи между ротором и статором.
Назначение и устройство жидкостного реостата
Жидкостные реостаты применялись в рудничном подъеме еще до применения релейно-контакторной аппаратуры. В то время жидкостные реостаты имели крупные конструктивные и принципиальные недостатки, в связи с чем не получили распространения. К числу имевшихся недостатков необходимо отнести: неоднозначность положения органов управления и внутреннего сопротивления реостата, невозможность дистанционного и автоматического управления, нестабильность концентрации электролита, громоздкость и др.
Современные жидкостные реостаты почти лишены этих недостатков и получают широкое распространение для регулирования скорости подъемных асинхронных двигателей.
Различают две основных конструкции жидкостных реостатов:
1. Электроды неподвижны, а уровень электролита переменный
2. Уровень электролита постоянный, а электроды подвижные
При рабочих напряжениях до 2 000 в реостат чаще всего изготовляют с общим баком. В этом случае каждая фаза отделяется от соседней керамической изоляцией или перегородками из оргстекла. При напряжениях свыше 2 000 в фазы реостата монтируются в отдельных баках, которые соединяются между собой резиновыми шлангами для циркуляции электролита.
Электроды жидкостных реостатов могут изготовляться из любой стали, литой бронзы или из различных сплавов.
В качестве электролитов применяются содовые растворы, обладающие отрицательным температурным коэффициентом. Концентрация содового раствора должна быть в пределах 5-10%.
Для отвода тепла от электролита применяются различные системы охлаждения; змеевик с циркулирующей по нему охлаждающей водой, встроенный непосредственно в бак с электролитом: дополнительные теплообменники с воздушным охлаждением как с естественной, так и с принудительной циркуляцией электролита; система водяного охлаждения в отдельном теплообменнике с принудительной циркуляцией воды и электролита. В результате интенсивного охлаждения удалось получить стабильное удельное сопротивление электролита.
При применении жидкостных реостатов для двигателей большой мощности непосредственное перемещение электродов требует от машиниста приложения значительной физической силы. Для облегчения этой операции, а также для возможности осуществления дистанционного и автоматического управления применяют электрический или гидравлический привод.
При плавном перемещении электродов или изменении уровня электролита происходит плавное изменение сопротивления реостата. Поэтому подъемный асинхронный двигатель работает в этом случае на бесконечном множестве искусственных характеристик, что приводит к плавному изменению вращающего момента, к плавному пуску двигателя без колебания ускорения, к хорошим условиям регулирования скорости движения подъемных сосудов. Это способствует увеличению срока службы механической части установки и дает возможность увеличить ускорение системы, т. е. увеличить производительность подъемной установки и ее к. п. д.
Управление жидкостным реостатом не требует релейно-контакторной аппаратуры, что повышает надежность работы.
Жидкостные реостаты по сравнению с металлическими имеют небольшие габариты и меньшую стоимость, что особенно резко проявляется при больших мощностях электродвигателей. Жидкостные реостаты типа ЖРН с вертикальными подвижными электродами, с принудительной воздушной системой охлаждения и принудительной циркуляцией электролита.
Комплекты электрооборудования подъемной установки с низковольтным асинхронным двигателем, а также подъемной установки с асинхронным двигателем и жидкостным реостатом в цепи ротора несколько отличаются от комплекта оборудования подъемной установки с высоковольтным асинхронным оборудованием. При применении жидкостного реостата нет магнитной станции с контакторами ускорения и ящиков металлического сопротивления; при низковольтном подъемном двигателе нет высоковольтного оборудования и т. д.
Для управления приводными двигателями шахтных подъемных машин применяют жидкостные реостаты в нормальном исполнении типа ЖРН-500, ЖРН-1000 и ЖРН-2000 и во взрывобезопасном исполнении типа ВЖР.
Преимуществом жидкостного реостата является,то что он обеспечивает плавность пуска двигателя, увеличивает срок службы механической части подъемной установки, позволяет получать любые значения сниженных скоростей, а также использовать один тип реостата без каких-либо переделок для широкого диапазона мощностей двигателя.
Основным недостатком жидкостных реостатов является интенсивное испарение электролита при повышенных и длительных нагрузках, а также большая сложность в эксплуатации, в связи с чем они имеют ограниченное применение.
Жидкостный реостат типа ЖРН состоит из бака, в котором расположен блок электродов с валом. Вал поворачивается в подшипниках качения, укрепленных в стенках бака. В баке, служащем резервуаром для электролита, расположены также вспомогательные электроды, предназначенные для получения предварительной ступени сопротивления. Ток подводится к электродам через проходные изоляторы, расположенные в вводной коробке, и гибкий провод. Ввод кабеля от ротора подъемного электродвигателя осуществляется муфтой на коробке ввода.
Электролит от циркуляционного насоса подводится через коллектор. Струи электролита направляются на концы электродов (для более интенсивного охлаждения) с помощью поворачивающихся насадок.
Электролит из бака реостата может сливаться по верхней или нижней сливной трубе. Если в здании расположено несколько жидкостных реостатов с одной общей системой охлаждения, то слив осуществляется электродвигателем и редуктором. Выходной вал редуктора при работе поворачивается на 90 0 . Между электродвигателем и редуктором может быть установлена реверсивная приставка с двумя реверсивными и одной тормозной электромагнитными муфтами. Реверсивная приставка позволяет изменять направление вращения вала электродов без изменения направления вращения двигателя. Для предотвращения поломок редукторов и ограничителей поворота вала реостата в редукторе имеется фрикционная муфта. На редукторе установлены концевые выключатели, ограничивающие угол поворота вала, а также сельсин, предназначенный для подачи сигнала о повороте вала на требуемый угол. Момент, создаваемый электродами, уравновешивается пружинным компенсатором.
Реостат типа ЖРН снабжен калориферными секциями для интенсивного охлаждения электролита, принудительная циркуляция которого осуществляется с помощью насоса. Калорифер для охлаждения обдувается вентилятором.
Жидкостные реостаты во взрывобезопасном исполнении изготовляют двух типов – ВЖР-250 и ВЖР-350 для электродвигателей мощностью соответственно до 250 и 500 кВт.
Реостат ВЖР-250 состоит из круглого бака, в котором расположен бак с тремя электродами. При повороте вала на 90 0 электроды полностью погружаются в электролит. Привод реостата ручной-непосредственно от рукоятки реостата или через редуктор от рукоятки, расположенной на пульте управления. Охлаждение реостата производится воздухом благодаря общешахтной депрессии.
Реостат ВЖР-350 имеет четыре электрода, электрический привод редуктора или ручной привод. Дугообразование на концах электродов предотвращается с помощью керамических экранов.
Источник: З. М. Федорова, Р.Н. Хаджиков, В. М. Качеровский “Рудничные подъемные установки”, Л. Ф. Завозин ” Шахтные подъемные установки””. Москва “Недра” 1975
Поделиться ссылкой:
Реостатный пуск — двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Реостатный пуск — двигатель
Cтраница 1
Реостатный пуск двигателя с ручным регулированием представляет собой процесс введения в цепь якоря группы резисторов и последующего поочередного и. [1]
Недостатком реостатного пуска двигателя является значительная потеря энергии в пусковом реостате. Если осуществлять пуск двигателя плавным повышением напряжения, подаваемого на якорь ( для этого используют источник постоянного тока с регулируемым напряжением, например регулируемый выпрямитель), то потери энергии значительно уменьшаются. Однако такой пуск, требует применения сложного оборудования. [2]
При многоступенчатом реостатном пуске двигателя параллельного возбуждения при постоянном напряжении сети задаются обычно определенными границами колебаний пускового тока или пускового момента. [4]
При многоступенчатом реостатном пуске двигателя параллельного возбуждения и постоянном напряжении сети задаются обычно определенными границами колебаний пускового тока или пускового момента. [5]
Автоматизированная система двухступенчатого реостатного пуска двигателя в функции времени действуют в такой последовательности. [6]
В этих устройствах применен реостатный пуск двигателей. Для уменьшения числа контак-торных ступеней применена схема пуска с активно-индуктивным сопротивлением. [7]
Для уменьшения пусковой нагрузки применяют реостатный пуск двигателя. [8]
Таким образом, процесс пуска двухклеточного двигателя имеет сходство с процессом реостатного пуска двигателя с фазным ротором ( см. рис. 12 — 22), когда в начале пуска в ротор вводится добавочное активное сопротивление, а по мере разгона это сопротивление выводится. [9]
Таким образом, процесс пуска двухклеточного двигателя имеет сходство с процессом реостатного пуска двигателя с фазным ротором ( см. рис. 12 — 23), когда в начале пуска в ротор вводится добавочное активное сопротивление, а по мере разгона это сопротивление выводится. [10]
Для сравнения пусковых свойств двигателей различного типа на рис. 5 — 5 приведены механические характеристики реостатного пуска двигателя переменного тока с контактными кольцами, а на рис. 5 — 6 — двигателя постоянного тока с последовательным возбуждением. [12]
В случае двигателей с глубокими пазами или с ротором типа Бушеро, а также при реостатном пуске двигателей с кольцами величина вторичного сопротивления меняется и ее среднее значение за время разбега в большей или меньшей степени превышает ее значение г 2н, отвечающее номинальной нагрузке. [13]
Регулирование скорости вращения с помощью реостата в цепи ротора производится по той же схеме рис. 28 — 3, что и реостатный пуск двигателя, но реостат при этом должен быть рассчитан на длительную работу. [14]
Ступени трансформатора рассчитывают исходя из колебаний пускового тока в выбранных пределах / min и / тах, так же как при реостатном пуске двигателей постоянного тока. [15]
Страницы: 1 2