


РЗ ЛР2 Реле времени
6
ЛАБОРАТОРНАЯ РАБОТА №2
РЕЛЕ ВРЕМЕНИ
Цель работы: изучение конструкции и принципов действия реле времени эксплуатационных свойств, а также получение практических навыков исследования характеристик.
Описание лабораторного стенда
Принципиальная схема лабораторного стенда приведена на Рисунке 1, которая также располагается на стенде. Схема стенда полностью собрана, на передней панели располагаются электрические аппараты, обозначенные в соответствии с принципиальной схемой.
Включить выключатель SF1, тумблер S1включает реле времени и секундомер.

Рисунок 1- Схема стенда исследования реле времени РВ-100.
Конструкция и основные данные реле времени РВ-100
Реле времени серии РВ100 — электромагнитное, содержит следующие основные узлы: электромагнитный привод, часовой механизм, контактную систему. Конструкция реле приведена на Рисунке 2.Электромагнитный привод состоит из магнитопровода, обмотки, якоря и возвратной пружины. Контактная система реле состоит из следующих элементов мгновенно действующих контактов, одного или двух подвижных контактов, укрепленных на торцевых частях траверсы, перемещающихся колодок с неподвижными временно замыкающими и основными контактами.
Колодка основного контакта отличается от колодки временно замыкающего контакта наличием упора, ограничивающего ход траверсы. Уставки по времени регулируются на контактах независимо одна от другой перемещением контактных колодок по шкале, причем на временно замыкающем контакте должна выставляться меньшая из двух заданных выдержка времени. Отсчет выдержки времени реле начинается при запуске заторможенного часового механизма при втягивании якоря реле.
Реле времени серии РВ100 предназначены для работы на постоянном оперативном токе и имеют исполнение на 24, 48, 110 и 220 В. Сопротивление обмоток составляет соответственно 20, 80, 450 и 1750 Ом.
Реле имеет стальной цилиндрический якорь, перемещающийся в латунной гильзе. Для исключения залипания якоря в притянутом положении на нижнем конце якоря предусмотрена бронзовая шайба. На верхнем конце якоря укреплен рычаг с пластмассовым толкателем, воздействующим на мгновенные контакты.

Рисунок 2- Общий вид реле РВ-100:1 — мостик подвижного контакта, 2 — траверса, 3 — колодка неподвижного основного контакта, 4 – колодка неподвижного временно замыкающего контакта, 5 – цоколь, 6 – обмотка, 7 – якорь, 8- заводной рычаг часового механизма, 9 – часовой механизм, 10 – кожух, 11 – магнитопровод, 12 — добавочный резистор, 13 – конденсатор, 14 – толкатель мгновенного действия.
Принцип действия реле времени РВ-100
Реле времени предназначены для создания выдержки времени срабатывания устройств релейной защиты и автоматики. Наибольшее распространение получили реле времени с часовыми механизмами.
При подаче напряжения питания на обмотку реле 7, якорь 5 втягивается, палец 2 освобождается и под действием пружины 4 происходит поворот зубчатого сектора 5. Шестерня 8 и подвижный контакт 9 поворачиваются, и, с задержкой по времени, контакты 10 замыкаются. Равномерность поворота подвижного контакта обеспечивается анкерным механизмом 12. Выдержки времени устанавливаются путем перемещения контактов 10 по шкале 11, отградуированной в секундах. Контакты мгновенного действия 6, 7 переключаются мгновенно при втягивании якоря.
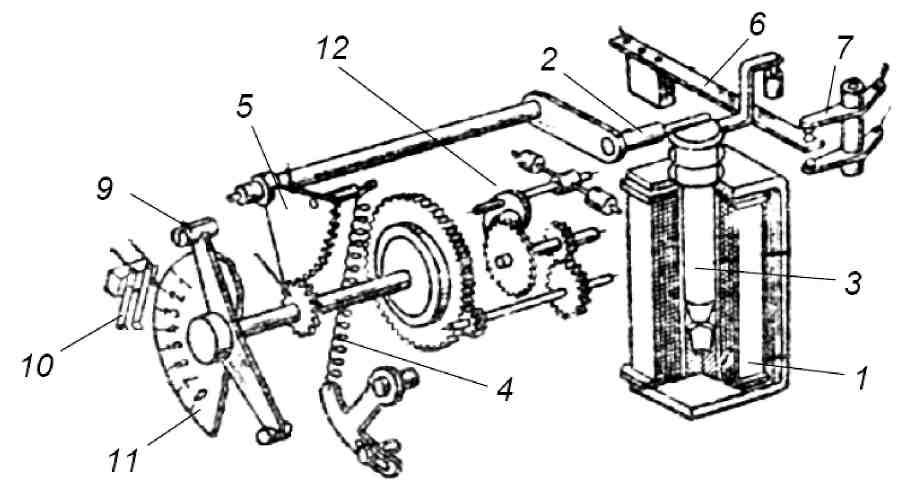
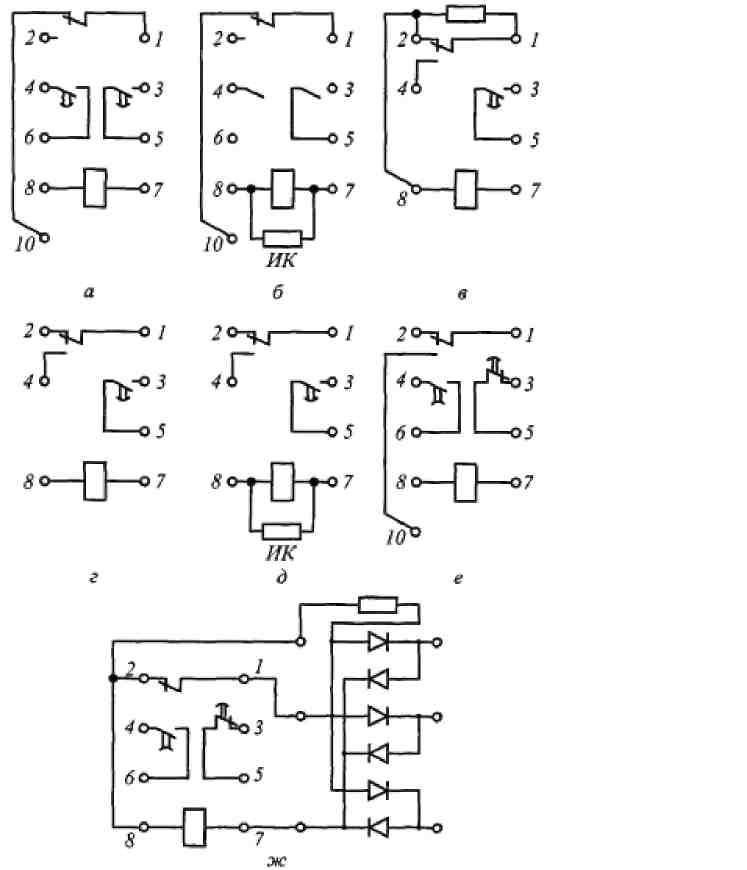
Рисунок 4- Схемы внутренних соединений реле (вид на реле сзади):а-РВ112-РВ142 на 24 и 48 В и РВ218-РВ248;б — PB112-PB142 на 110 и 220 В;в- РВ113-РВ143;г- РВ114-РВ144 на 24 и 48 В и РВ217- РВ247;д- РВ114-РВ144 на ПО и 220 В и РВ215-РВ245;е- РВ215- РВ245;ж- РВ215К-РВ245К с ВУ 200;ИК-искрогасительный контур.
Порядок выполнения работы
Изучить конструкцию и принцип работы реле времени РВ-100.
Снять зависимость времени срабатывания
 ,
от времени уставки реле времени.
,
от времени уставки реле времени.Рассчитать действительное время срабатывания реле
 ,
от времени уставки
,
от времени уставки  реле времени.
реле времени.
 .
. Действительное
время срабатывания реле  ,с:
,с:





Абсолютное время срабатывания реле:
 ,с.
,с.





Относительная погрешность времени срабатывания реле:





Таблица 1. Экспериментальные и расчетные значения
| | | | | | |
1 | 1,32 | 1,35 | 1,39 | 1,35 | -0,35 | -35 |
3 | 3,34 | 3,81 | 3,61 | 3,58 | -0,58 | |
5 | 5,72 | 5,89 | 5,85 | 5,82 | -0,82 | -16,4 |
7 | 7,46 | 7,59 | 7,6 | 7,55 | -0,55 | -7,85 |
9 | 9,6 | 9,76 | 9,38 | 9,58 | -0,58 | -6,44 |







Строим график
зависимости действительного времени
срабатывания  ,относительной
,относительной  и абсолютной погрешности
и абсолютной погрешности  от времени уставки реле
от времени уставки реле  .
.
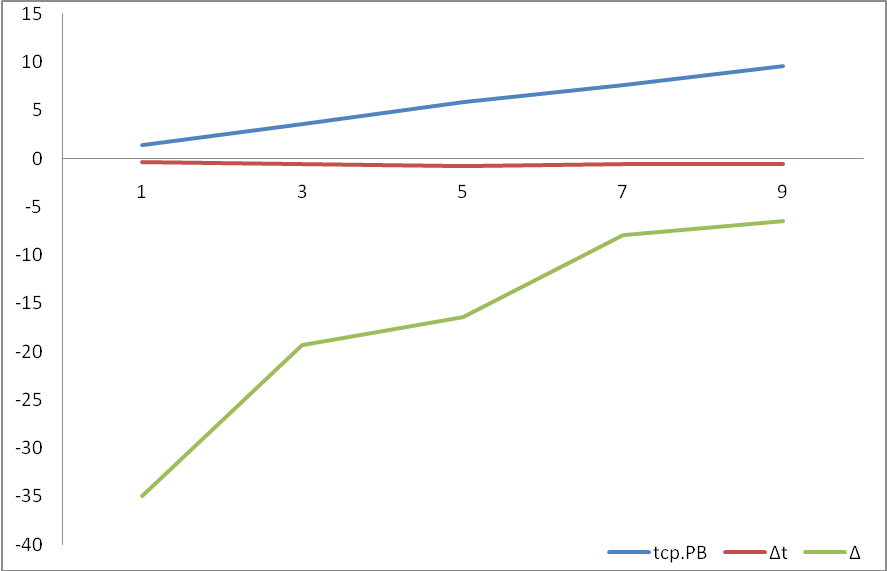
Вывод: из графика
видно, что при увеличении времени  увеличивается действительное время
срабатывания реле
увеличивается действительное время
срабатывания реле  .
.
Реле времени — это… Что такое Реле времени?
 Реле времени
Реле времени  Реле времени с часовым механизмом
Реле времени с часовым механизмомРеле́ вре́мени — реле, предназначенное для создания независимой выдержки времени и обеспечения определённой последовательности работы элементов схемы. Реле времени применяется в случаях, когда необходимо автоматически выполнить какое-то действие не сразу после появления управляющего сигнала, а через установленный промежуток времени.
Принципы работы
С электромагнитным замедлением
Реле времени с электромагнитным замедлением применяются только при постоянном токе. Помимо основной обмотки реле этой серии имеют дополнительную короткозамкнутую обмотку, состоящую из медной гильзы. При нарастании основного магнитного потока он создает ток в дополнительной обмотке, который препятствует нарастанию основного магнитного потока. В итоге результирующий магнитный поток увеличивается медленнее, время «трогания» якоря уменьшается, чем обеспечивается выдержка времени при включении. При отключении тока в катушке за счёт индуктивности короткозамкнутого витка магнитный поток в реле какое-то время сохраняется, удерживая якорь.
Этот вид реле времени обеспечивает выдержку времени при срабатывании от 0,07 с до 0,11 с, при отключении от 0,5 с до 1,4 с.
С пневматическим замедлением
Реле времени с пневматическим замедлением имеет специальное замедляющее устройство — пневматический демпфер, катаракт. Регулировка выдержки осуществляется изменением сечения отверстия для забора воздуха, как правило, с помощью регулировочного винта.
Этот тип реле времени обеспечивает выдержку времени от 0,4 до 180 с, с точностью срабатывания 10 % от уставки.
С часовым или анкерным механизмом
Реле времени с анкерным или часовым механизмом работает за счёт пружины, которая заводится под действием электромагнита, и контакты реле срабатывают только после того, как анкерный механизм отсчитает время, выставленное на шкале. Разновидность подобных реле используется в мощных (на токи в сотни и тысячи ампер) автоматических выключателях на напряжение 0,4-10 кВ. Составные части такого реле — механизм замедления и токовая обмотка, взводящая его пружину. Скорость хода механизма зависит от затяжки пружины, то есть от тока в обмотке, по окончании хода механизм вызывает отключение автомата, тем самым выполняя функции тепловой защиты от перегрузок, не нуждаясь при этом в коррекции по температуре окружающего воздуха.
Этот тип реле времени обеспечивает выдержку времени от 0,1 до 20 с с точностью срабатывания 10 % от уставки.
Моторные реле времени
Моторные реле времени предназначены для отсчета времени от 10 с до нескольких часов. Оно состоит из синхронного двигателя, редуктора, электромагнита для сцепления и расцепления двигателя с редуктором, контактов.
Электронные реле времени
До появления недорогих микроконтроллеров, работа электронных реле времени была основана на переходных процессах в разрядном контуре RC или RL. Современные реле времени отрабатывают необходимую задержку времени в соответствии с программой, «зашитой» в микроконтроллер. При этом сам микроконтроллер может тактироваться с помощью встроенного кварцевого резонатора или RC-генератора.
См. также
Источники
Ссылки
Обратная связь ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса — ваш вокал Как цель узнает о ваших желаниях прежде, чем вы начнете действовать. Как компании прогнозируют привычки и манипулируют ими Целительная привычка Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Тренинг уверенности в себе Вкуснейший «Салат из свеклы с чесноком» Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Как слышать голос Бога Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека — Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
|
По истечению времени реле размыкает цепь, вследствие чего отключается прибор, который подключен к линии, управляемой данным реле. Это может быть произведено с целью экономии электроэнергии и вместе с тем за ненадобностью работы прибора после определенного периода его работы.
В общем, назначение данного прибора управления электропитанием ясно, осталось лишь разобраться с его принципом работы и рассмотреть схему, приведенную ниже.
Принцип работы реле времени состоит в том, что блок управления реле представляет собой электронный таймер, настраиваемый вручную и который с истечением заданного времени дает сигнал исполнительному механизму, который и размыкает цепь. При этом стоит заметить, что таймер может быть электронным (что чаще всего встречается в современных реле времени) или механическим (в большей степени старого образца реле).
Электронный таймер в реле времени представлен как микросхема, которая программируется разными импульсами, которые возникают в результате нажатия клавиш на панели управления реле контроля времени.
Работа реле времени с таймером механического образца ничем не отличается, а сам механизм таймера такого реле имеет контакты, которые находятся в определенном положении (сомкнуты или разомкнуты). При повороте регулятора механизма таймера времени они меняют свое положение, то бишь размыкаются или мыкаются, тем самым, соответственно, замыкая или размыкая электрическую цепь.
Со временем они становятся в первоначальную позицию, время зависит от того, на сколько градусов выполнен поворот регулятора (чем больше повернуть регулятор, тем больше нужно будет времени для возвращения в первоначальную позицию).
Схема подключения реле времени может иметь выход для подключения к компьютеру, в таком случае это реле называется интеллектуальным и может иметь до 40 групп для подключения приборов.
Это может давать расширенные возможности по программированию режимов времени, чего нельзя было добиться вручную, орудуя лишь парой кнопок и имея в наличии всего пару выходов групп на панели управления данным устройством автоматического управления цепью.
В этой статье мы рассмотрели основные виды реле, которые применяются в бытовых электросетях. Были вкратце раскрыты основные положения относительно принципа работы реле, а также схемы их подключения. Однако, не были рассмотрены многие технические подробности, так как статья и без того объемная.
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Иркутский государственный университет путей сообщения» Красноярский институт железнодорожного транспорта
Кафедра «Система обеспечения движения поездов»
Лабораторная работа №1 По дисциплине «Основы технической диагностики»
«Реле: Тока, напряжения, времени, температуры, фото реле»
Выполнил: студент гр. СОД.1-14-1 Казанцев М.В________
Проверил: преподаватель Лымарев В.И_________
Красноярск 2016г.
|

 Отёска стен и прирубка косяков — Когда на доме не достаёт окон и дверей, красивое высокое крыльцо ещё только в воображении, приходится подниматься с улицы в дом по трапу.
Отёска стен и прирубка косяков — Когда на доме не достаёт окон и дверей, красивое высокое крыльцо ещё только в воображении, приходится подниматься с улицы в дом по трапу. Дифференциальные уравнения второго порядка (модель рынка с прогнозируемыми ценами) — В простых моделях рынка спрос и предложение обычно полагают зависящими только от текущей цены на товар.
Дифференциальные уравнения второго порядка (модель рынка с прогнозируемыми ценами) — В простых моделях рынка спрос и предложение обычно полагают зависящими только от текущей цены на товар. Реле времени имеет элементарное назначение – включение или выключение линии фазового проводника с течением заданного промежутка времени. То есть человек настраивает реле на время работы, через которое оно должно разомкнуть электрическую цепь и уходит.
Реле времени имеет элементарное назначение – включение или выключение линии фазового проводника с течением заданного промежутка времени. То есть человек настраивает реле на время работы, через которое оно должно разомкнуть электрическую цепь и уходит.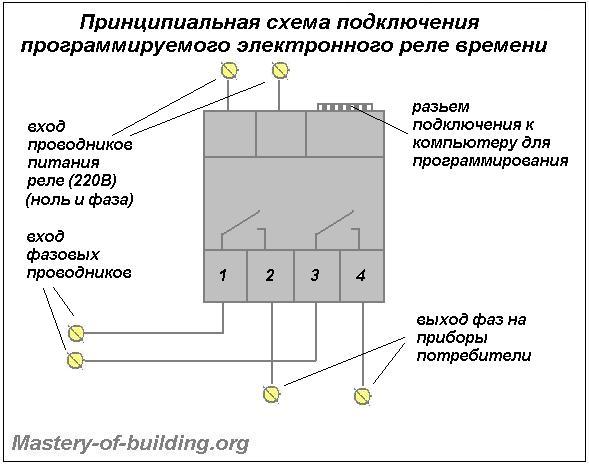
 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТАРеле времени — это… Что такое Реле времени?
 Реле времени
Реле времени  Реле времени с часовым механизмом
Реле времени с часовым механизмомРеле́ вре́мени — реле, предназначенное для создания независимой выдержки времени и обеспечения определённой последовательности работы элементов схемы. Реле времени применяется в случаях, когда необходимо автоматически выполнить какое-то действие не сразу после появления управляющего сигнала, а через установленный промежуток времени.
Принципы работы
С электромагнитным замедлением
Реле времени с электромагнитным замедлением применяются только при постоянном токе. Помимо основной обмотки реле этой серии имеют дополнительную короткозамкнутую обмотку, состоящую из медной гильзы. При нарастании основного магнитного потока он создает ток в дополнительной обмотке, который препятствует нарастанию основного магнитного потока. В итоге результирующий магнитный поток увеличивается медленнее, время «трогания» якоря уменьшается, чем обеспечивается выдержка времени при включении. При отключении тока в катушке за счёт индуктивности короткозамкнутого витка магнитный поток в реле какое-то время сохраняется, удерживая якорь.
Этот вид реле времени обеспечивает выдержку времени при срабатывании от 0,07 с до 0,11 с, при отключении от 0,5 с до 1,4 с.
С пневматическим замедлением
Реле времени с пневматическим замедлением имеет специальное замедляющее устройство — пневматический демпфер, катаракт. Регулировка выдержки осуществляется изменением сечения отверстия для забора воздуха, как правило, с помощью регулировочного винта.
Этот тип реле времени обеспечивает выдержку времени от 0,4 до 180 с, с точностью срабатывания 10 % от уставки.
С часовым или анкерным механизмом
Реле времени с анкерным или часовым механизмом работает за счёт пружины, которая заводится под действием электромагнита, и контакты реле срабатывают только после того, как анкерный механизм отсчитает время, выставленное на шкале. Разновидность подобных реле используется в мощных (на токи в сотни и тысячи ампер) автоматических выключателях на напряжение 0,4-10 кВ. Составные части такого реле — механизм замедления и токовая обмотка, взводящая его пружину. Скорость хода механизма зависит от затяжки пружины, то есть от тока в обмотке, по окончании хода механизм вызывает отключение автомата, тем самым выполняя функции тепловой защиты от перегрузок, не нуждаясь при этом в коррекции по температуре окружающего воздуха.
Этот тип реле времени обеспечивает выдержку времени от 0,1 до 20 с с точностью срабатывания 10 % от уставки.
Моторные реле времени
Моторные реле времени предназначены для отсчета времени от 10 с до нескольких часов. Оно состоит из синхронного двигателя, редуктора, электромагнита для сцепления и расцепления двигателя с редуктором, контактов.
Электронные реле времени
До появления недорогих микроконтроллеров, работа электронных реле времени была основана на переходных процессах в разрядном контуре RC или RL. Современные реле времени отрабатывают необходимую задержку времени в соответствии с программой, «зашитой» в микроконтроллер. При этом сам микроконтроллер может тактироваться с помощью встроенного кварцевого резонатора или RC-генератора.
См. также
Источники
Ссылки
8.2. Реле выдержки времени и программные устройства
Реле выдержки времени предназначены для создания определенной временной задержки при передаче сигнала от одного элемента автоматики к другому.
Программное устройство представляет собой разновидность реле выдержки времени и имеет обычно несколько независимых выдержек времени сравнительно большой величины.
Реле выдержки времени изготовляются с электрическими, пневматическими и гидравлическими воспринимающими органами и с электрическими, механическими, пневматическими, гидравлическими’ и другими устройствами замедления. Наибольшее распространение получили реле с электрическими воспринимающими органами, реагирующие на сигналы постоянного или переменного тока.
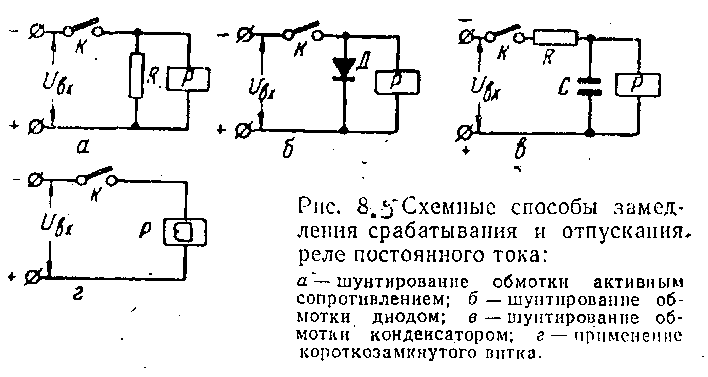
Для создания сравнительно небольшой выдержки времени (до 5 сек) часто применяются простейшие схемные методы, замедляющие нарастание или спадание токов в обмотке электромагнитного реле постоянного тока при помощи резисторов, конденсаторов, полупроводниковых диодов, дросселей и короткозамкнутых витков или колец.
На рисунке 8.5 показаны схемные способы замедления электромагнитного реле Р при срабатывании и отпускании. При большом числе витков обмотки реле весьма эффективным методом является шунтирование обмотки активным сопротивлением или диодом (рис.8.5 а и б). Сущность такого метода состоит в том, что э.д.с. самоиндукции, возникающая в обмотке реле после его отключения ключом К, поддерживает протекание тока, в прежнем направлении. Этот ток, замыкаясь через шунтирующее сопротивление R, медленно убывает, а якорь реле некоторое время остается в притянутом состоянии.
Выдержка времени на отпускание реле может быть определена по формуле:
 ,
,
где RpиL— соответственно активное сопротивление и индуктивность обмотки реле в положении покоя, то есть при максимальном рабочем зазоре;Iтр— ток трогания якоря реле при срабатывании.
Следует заметить, что шунтирующее сопротивление вызывает дополнительный расход мощности. Этот недостаток устранен в схеме с шунтирующим диодом Д, включенным навстречу питающему напряжению. Кроме того, схема с диодом позволяет получить большую выдержку времени, поскольку диод включен в проводящем направлении и в уравнении, сопротивление R= 0.
На рисунке 8.5 в представлена схема, в которой после замыкания ключа К протекает большой ток заряда емкости С, а напряжение Uвхпочти полностью гасится на резистореR. По мере заряда емкости ток в обмотке реле возрастает до определенного значения, при котором реле срабатывает. Продолжительность времени задержки срабатывания зависит от постоянной времени цепи и может изменяться в широких пределах подбором соответствующей емкости конденсатора С и сопротивленияR.
8.3. Электрические исполнительные механизмы.
Исполнительные механизмы автоматических устройств предназначены для силового воздействия на регулирующие органы объектов управления. Они классифицируются по виду используемой энергии: электрические, гидравлические и пневматические. В мелиорации обычно применяют электрические и гидравлические механизмы. По характеру воздействия на регулирующий орган различают двухпозиционный, многопозиционные и пропорциональные исполнительные механизмы.
Двухпозиционные выполняют простейшие операции (например, открыть — закрыть), многопозиционные — ступенчатое, пропорциональное и плавное регулирование
Электрические исполнительные механизмы выполняются с электромагнитным (соленоидным) и электродвигательным приводом.
Исполнительные механизмы с электромагнитным приводом обеспечивают поступательное перемещение регулирующих органов. Они применяются главным образом в электромагнитных клапанах и вентилях для двухпозиционного регулирования. Чтобы открыть клапан и вентиль, питание подают на катушку электромагниту которая втягивает сердечник, связанный с запорным органом вентиля. Закрытие вентиля происходит под действием пружины при отключении катушки электромагнита.
Для снижения потребления электроэнергии эти механизмы оснащаются механическими защелками, удерживающими сердечник при открытом вентиле и отключении питания катушки. Закрытие происходит за счет подачи импульса тока в маломощную катушку электромагнита освобождения защелки.
В электродвигательных исполнительных механизмах для привода используются одно- и двухфазные двигатели переменного тока, асинхронные трехфазные, синхронные, двигатели постоянного тока и сельсины.
На рисунке приведена схема двухпозиционного исполнительного механизма с электродвигательным приводом типа ДР-1М, который состоит из конденсаторного двигателя I и контактного управляющего устройства II. Двигатель имеет две статорные обмотки 3 и 4. В одну из них включен конденсатор для смещения фазы протекаемого тока и получения вращающегося магнитного поля. С валом ротора 2 кинематически связан ползунок 5 контактного управляющего устройства. В исходном положении ползунок находится на одном из контактов 8 или 9, выступающих над контактной пластиной 6. Когда ползунок размещен на контакте 8 и замыкается вверх контакт датчика 1, управляющего исполнительным механизмом, получают питание обмотки двигателя и он начинает вращаться. Ползунок сходит с контакта 8 на пластину 6, но цепь питания двигателя остается замкнутой за счет перемыкания ползунком пластин 6 и 7. Сделав полоборота, ползунок окажется на контакте 9 и двигатель остановится. При переключении контакта датчика 1 вниз, двигатель вновь получает питание и вращаясь, переместит ползунок на полоборота до размещения на контакте 8. Двигатель всегда вращается в одном направлении, а направление движения регулирующего органа изменяется за счет внешних кинематических связей между исполнительным механизмом и регулирующим органом.

Механизм ДР-М отличается от механизма ДР-1М возможностью сочленения с регулирующим органом не только с помощью диска, совершающего вращательное движение, но и штоком, перемещающимся поступательно.
В системах пропорционального регулирования применяют исполнительные механизмы ПР-1М, ПР-М и МЭО. Для привода используются конденсаторные двигатели, но в отличие от механизмов ДР предусмотрена возможность реверсирования. Реверсирование происходит за счет переключения конденсатора С из одной цепи обмотки двигателя в другую конечными выключателями К1 и К2
Для дистанционного контроля положения и устройства обратной связи механизмы оснащаются блоками с индуктивными, резистивными датчиками и микропереключателями положения.
Исполнительные механизмы ПР, ДР и МЭО широко используются для привода поворотных дисковых затворов. В качестве привода задвижек и затворов перегораживающих сооружений применяются многооборотные электрические исполнительные механизмы.
2. Технические характеристики двигателей исполнительных механизмов М, А, Б, В, Г, Д
Показатели | Тип механизма | |||||
М | А | Б | В | Г | Д | |
Мощность двигателя, кВт Частота вращения двигателя, об/мин | 0,03 1300 | 0,12 0,18 1400 | 0,6 1,3 1300 | 3,0 4,0 1350 | 4,0 7,5 1350 | 7,5 — 1300 |
В мелиоративной практике наиболее распространены унифицированные исполнительные механизмы типов М, А, Б, В, Г, Д, Они принципиально однотипны и отличаются по габаритам, мощности двигателя и несущественными конструктивными изменениями. Как приводные двигатели в механизмах используют асинхронные трехфазные двигатели с повышенным скольжением и фланцевым креплением. Двигатель связан с запорным органом задвижки червячным редуктором (в механизмах М и А цилиндрическим). Механизм имеет стрелку местного указателя положения, кинематически связанную с приводным валом, и потенциометр дистанционного указателя. Защищается механизм от перегрузок муфтой ограничения крутящего момента или реле максимального тока.
Предусматриваются штурвал ручного привода и механическая блокировка, которая при включении ручного привода отсоединяет вал двигателя от вала червячного редуктора, и напротив, при сочленении двигателя с редуктором расщепляется его кинематическая связь со штурвалом ручного привода.
Электрические исполнительные механизмы также применяют для привода плоских щитовых затворов перегораживающих сооружены. Промышленностью серийно выпускаются винтовые подъемники типа В-73 с асинхронным трехфазным приводом. Двигатели соединяются через редуктор с грузовыми гайками привода грузовых подъемных винтов с трапецеидальной резьбой. Для местного отсчета и дистанционных измерений установлены датчики положения затвора. В подъемниках предусмотрена рукоятка ручного подъема.
Техническая характеристика приводных двигателей винтовых подъемников приведена в таблице 3.
3. Техническая характеристика приводных двигателей винтовых подъемников В-73
Показатели | Тип | |||||||
1ЭВ | 2,5ЭВ | 5ЭВД | 5ЭВ | 10ЭВД | 10ЭВ | 20ЭВД | 20ЭВ | |
Мощность двигателя, кВт | 0,4 | 0,6 | 1,0 | 1,0 | 1,3 | 1,3 | 2,0 | 2,0 |
Частота вращения, об/мин | 880 | 880 | 870 | 870 | 870 | 870 | 900 | 900 |
Продолжительность подъема на 1 м двигателем, мин | 8 | 8 | 8 | 5 | 5 | 6 | 6 | 6 |
Продолжительность подъема на 1 м вручную, мин | 3 | 7 | 9 | 15 | 19 | 20 | 40 | 33 |

Рис. 8.7. Регулятор уровня с мембранным исполнительным механизмом:
1 — выпускная труба; 2 — рабочая камера; 3 — мембрана; 4 — рабочий клапан; 5 — дроссельная трубка; 6 — входная дроссельная трубка; 7 — гибкая трубка; 8 — поплавковая камера; 9 — поплавок.