


Частотные преобразователи | Регуляторы частоты
Частотный преобразователь используется для плавного регулирования момента и скорости вращения вала электродвигателя. Также частотник снижает пусковые токи, уменьшает потребление электроэнергии (до 60%), обеспечивает плавный пуск и торможение привода, его защиту от перегрузок и перегрева.
Принцип работы
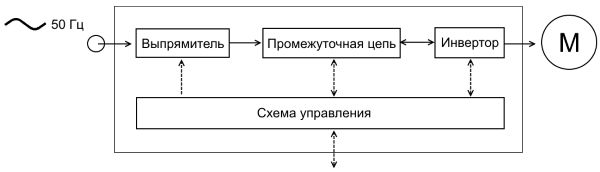
Общий принцип работы частотного преобразователя основан на формировании выходного напряжения с заданными характеристиками. Преобразователь частоты с промежуточным звеном устроен следующим образом. На первом этапе преобразования происходит выпрямление переменного напряжения электросети, уменьшение его пульсации и фильтрация гармоник (гармонических искажений тока). Из выпрямителя постоянный ток поступает в цепи инвертора, где преобразуется в переменное напряжение с изменяемой частотой и амплитудой. В качестве силовых элементов используются IGBT-транзисторы, выполняющие функцию электронных ключей. Управление частотой позволяет регулировать скорость вращения ротора электродвигателя.
По способу управления различают скалярные и векторные преобразователи частоты. Скалярные частотники используют широтно-импульсную модуляцию (ШИМ) — распространенный метод управления, суть которого заключается в формировании и подаче выходных импульсов тока заданной частоты и скважности на статорную обмотку электродвигателя. Особенностью скалярного способа является возможность одновременного управления несколькими электродвигателями.

Векторный преобразователь частоты управляет магнитными полями как статора, так и ротора за счет изменения значений напряжения и выходного тока (силы, частоты и фазы). Выпускаются два класса подобных устройств: с обратной связью (с датчиком на валу двигателя) и бездатчиковые. Частотный преобразователь с обратной связью быстро реагирует на изменение нагрузки, сохраняя заданную скорость вращения двигателя. Это наиболее современный тип оборудования. В целом преобразователи частоты с векторным управлением имеют более высокую точность, но, как правило, сложнее в настройке.
Применение
Инверторы частоты используются для управления электроприводами различного оборудования:
- насосы систем водоснабжения (скважинные, глубинные)
- станочное оборудование (токарные, шлифовальные, ленточнопильные станки)
- лифтовое оборудование
- вентиляторы
- компрессоры
- конвейеры, транспортеры, рольганги
- подъемное оборудование (краны, электротельферы)
Как выбрать частотный преобразователь
Существует несколько основных параметров, которыми руководствуются при выборе частотника.
1. Мощность преобразователя частоты должна соответствовать номинальной мощности электродвигателя. Этот принцип верен в случае с обычным асинхронным приводом. Если используется специальный двигатель (синхронный, с тормозом и т. д.), то правильнее ориентироваться на значение номинального тока — у частотника оно должно быть выше, чем у двигателя.
2. Параметры электросети. Большинство современных частотных инверторов рассчитаны на работу в трехфазной сети с напряжением 380В. Также выпускаются однофазные инверторы малой мощности, рассчитанные на напряжение 220-240В. К сожалению, качество электросети не всегда стабильно. Падение напряжения может привести к отключению частотника, резкое повышение выведет его из строя. Чтобы избежать подобных проблем, рекомендуется выбирать ПЧ с широким диапазоном напряжений.
Обратите внимание. Однофазный частотник можно подключить к трехфазному двигателю по схеме «треугольник» (при подключении по схеме «звезда» происходит потеря мощности). Трехфазный частотный преобразователь также может работать в однофазной сети, но в этом случае его выходной ток не должен быть выше 50% от номинального значения.
3. Перегрузочная способность. Важный параметр, от которого зависит срок службы инвертора. Подбирайте ПЧ в соответствии с продолжительностью, периодичностью и величиной перегрузок двигателя. Обычно эти данные указываются в руководстве к приводу. Иногда рекомендуют приобретать преобразователь с запасом по мощности и пиковому току до 15%.
4. Диапазон регулирования частот. Практически любой преобразователь частоты обеспечит стабильную работу двигателя, если скорость его вращения не опускается ниже 10% от номинальной. При работе привода на низких оборотах необходимо позаботиться о дополнительном охлаждении, чтобы избежать перегрева. Верхний предел диапазона указывает на то, сможет ли инвертор управлять электродвигателем с высокими номинальными частотами. Наиболее широкий диапазон предлагают векторные частотные преобразователи.
5. Дополнительные опции. Нередко производители стремятся удешевить свою продукцию и предлагают частотники в базовой комплектации. При покупке преобразователя следует заранее позаботиться о защитном оборудовании: сетевом и моторном дросселях, тормозном резисторе и проч.
К прочим характеристикам инверторов, определяющих выбор той или иной модели, относятся: количество цифровых и аналоговых входов/выходов, класс защиты IP, информативность и удобство отображения рабочих параметров (количество строк на дисплее, тип экрана и проч.), уровень защиты двигателя (защита от скачков напряжения в сети, от перегрева, от короткого замыкания и т. д.), климатическое исполнение.
Также рекомендуем ознакомиться с каталогом мотор-редукторов. В ассортименте представлены приводы с червячной, зубчатой, планетарной и волновой передачами.
Дополнительная информация:
Выбор частотного преобразователя
Подключение и настройка преобразователя
принцип работы, способы регулирования частоты вращения асинхронного двигателя, видео
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках. Правда, у него масса недостатков, и одни из них – это быстрый износ щеток, если их установка была проведена с искривлением, да и срок их эксплуатации достаточно низок. При износе происходит искрение, поэтому такой движок во взрывоопасных и запыленных помещениях использовать нельзя. Плюс ко всему электродвигатель постоянного тока стоит дорого. Чтобы изменить данную ситуацию, используют асинхронный двигатель и частотный регулятор для асинхронного двигателя.

Практически по всем показателям электродвигатели, работающие на переменном токе, превосходят аналоги на постоянном. Во-первых, они надежнее. Во-вторых, имеют меньшие габариты и вес. В-третьих, цена ниже. В-четвертых, они проще в эксплуатации и подключении.
А вот недостаток у них один – это сложность регулирования частоты вращения. В данном случае стандартные способы регулирования частоты асинхронных двигателей здесь не подойдут, а именно – изменения напряжения, установка сопротивления и так далее. Частотное управление асинхронным электрическим двигателем – была проблема номер один. Хотя теоретическая база известна аж с тридцатых годов прошлого столетия. Все дело упиралось в дороговизну частотного преобразователя. Все изменилось, когда изобрели микросхемы, с помощью которых через транзисторы стало возможным собрать преобразователь частоты с минимальной себестоимостью.
Принцип регулирования
Итак, способ регулирования частоты вращения асинхронного двигателя основано на одной формуле. Вот она внизу.
ω=2πf/p, где
- ω – угловая скорость вращения статора;
- f – частота входного напряжения;
- p – количество полюсных пар.

То есть, получается так, что изменить скорость вращения электродвигателя можно лишь путем изменения частоты напряжения. Что это дает на практике? Первое – это плавность работы мотора, особенно это будет чувствовать при пуске оборудования, когда сам двигатель работает под самыми высокими нагрузками. Второе – повышенное скольжение. За счет этого растет КПД, и снижаются потери мощностных характеристик.
Структура частотного регулятора
Все современные преобразователи частоты построены на принципе так называемого двойного преобразования. То есть, переменный ток преобразуется в постоянный через неуправляемый выпрямитель и фильтр. Далее, через импульсный инвертор (он трехфазный) происходит обратное преобразование тока постоянного в ток переменный. Инвертор сам состоит из шести силовых ключей (транзисторных). Так вот каждая обмотка электрического движка подключается к определенным ключам выпрямителя (положительному или отрицательному). Именно инвертор изменяет частоту напряжения, которое прикладывается к статорным обмоткам. По сути, именно через него происходит частотное регулирования электродвигателя.

В этом приборе на выходе устанавливаются силовые транзисторы. Они выполняют роль ключей. Если сравнивать их с тиристорами, то необходимо отметить, что первые вырабатывают сигнал в виде синусоиды. Именно данная форма создает минимальные искажения.
Принцип работы
Теперь сам принцип работы частотного преобразователя. Чтобы понять это, предлагаем разобрать рисунок ниже.
 Принцип работы
Принцип работыИтак, пройдемся по рисунку, где
- «В» – это неуправляемый силовой выпрямитель диодного типа.
- «АИН» – автономный инвертор.
- «СУИ ШИМ» – система широтно-импульсного управления.
- «САР» – система автоматического регулирования.
- «Св» – конденсатор фильтра.
- «Lв» – дроссель.
По схеме очень хорошо видно, что инвертор регулирует частоту напряжения за счет системы широтно-импульсного управления (оно высокочастотное). Именно эта часть регулятора отвечает за подключение обмоток статора электродвигателя попеременно то к положительному полюсу выпрямителя, то к отрицательному. Периодичность подключения к полюсам происходит по синусоидальной кривой. При этом частота импульсов определяется именно частотой ШИМ. Так и происходит частотное регулирование.

Заключение по теме
Как видите, данный способ регулирования частоты вращения асинхронного двигателя достаточно прост. Но и не только. Он позволяет уйти от ненадежных двигателей постоянного тока, перейти на более надежные виды электрического оборудования. К тому же структура прибора, основанная на современных методах преобразования электрического тока, сделала его дешевым и доступным. Плюс ко всему простота устройства дает возможность собрать частотники своими руками.
Частотный регулятор скорости. Принцип действия регулятора.
Хорошая вентиляция воздуха в жилом помещении играет большую роль в жизни человека. Микроклимат прямо зависит от вентиляционной установки. Основной по популярности сегодня системой вентиляции является приточно-вытяжная.
Регуляторы скорости асинхронных двигателей
Множество новых установок вытяжки оснащены электрическим двигателем с возможностью регулировки оборотов электродвигателя. Для регулирования оборотов применяют приборы специального типа, частотные схемы вращения двигателя. Такие моторы применяются не только в устройствах вытяжки, но и в быту дома.
Недавно регуляторы скорости вращения электродвигателей асинхронного типа имели в своем составе реле и простые разъединители, которыми производили запуск наибольших оборотах, останавливали привод мотора.
Все регуляторы скорости, как и частотные, служат для того, чтобы менять обороты двигателя. Главная опция регулятора – это изменение мощности системы вытяжки, различного оборудования. Кроме этого, частотные регуляторы имеют и другие функции:
- снижение износа механизма в работе;
- малый расход электроэнергии;
- низкая шумность на большой скорости.
Многие приборы, которые имеют свойство изменения оборотов, применяются как единичные приборы, так и дополнительными блоками для управления приборами в быту с электрическими двигателями.
Способы изменения скорости
Для многих видов двигателей применяют такие варианты регулировки скорости:
- регулирование напряжения питания;
- схемы подключения обмоток моторов с несколькими скоростями;
- частотный метод изменения токовых значений;
- применение коммутатора электронного типа.
Регулятор напряжения позволяет применять простые устройства для мягкой регулировки ступенчатого типа скорости. Для асинхронных двигателей с внешним ротором целесообразно изменять сопротивление якоря, оптимизации оборотов мотора. В этом случае значение скорости будет изменяться в значительном интервале.
Виды и типы скоростных регуляторов
- применение тиристоров;
- схема с использованием симисторов;
- частотные инверторы;
- трансформаторные типы.
Регуляторы на тиристорах применяются для 1-фазных моторов, кроме изменения скорости, производят защиту механизмов от скачков напряжения и нагрева.
Симисторные регуляторы управляют многими моторами одновременно, если значение мощности не больше максимального. Это самый распространенный способ.
3-фазный регулятор точнее, имеет предохранитель тока, фильтр сглаживания шума на основе конденсатора.
Регулятор частотный для мотора асинхронного типа применяется при изменении напряжения входа в интервале 0-480 вольт, контроль скорости производится изменением электроэнергии. Он применяется в 3-фазных моторах, кондиционерах, вентиляторах с большой мощностью.
Для мощных двигателей применяют регулятор из трансформатора с тремя или с одной фазой. Этим устройством можно регулировать скорость мотора ступенями. Один трансформатор работает со многими моторами в одно время автоматически.
В эксплуатации электромотора кроме шума появляются помехи от электромагнитных волн, которые устраняются кабелем с экраном. Если применять 3-фазный регулятор скорости, то шума не бывает. Нужна установка фильтров сглаживания.
Для применения частотных регуляторов специалисты рекомендуют:
- контролировать соединения проводов и заземления;
- фильтр от помех;
- размещение регулятора в защищенном от солнца месте;
- вертикальное расположение регулятора для лучшего рассеивания тепла;
- не использовать частое выключение и включение для долгого времени службы.
Частотный регулятор скорости РМТ
Эти частотные регуляторы служат для регулировки скорости вращения электродвигателя вентилятора короткозамкнутого асинхронного типа, на 380 вольт. Действие регулятора основывается на принципе регулировки частоты, в то время как регулировка скорости вращения осуществляется путем частотного изменения напряжения на трех фазах, которое подключается на двигатель вентиляторной установки (25-50 герц). Управлять вентилятором можно от пульта управления или сигналом снаружи от 0 до 10 вольт.
Принцип действия преобразователя частоты, или инвертора заключается в следующем. Напряжение питания переменного тока проходит через выпрямитель на диодах, фильтр батареи емкостей значительного размера для уменьшения пульсаций потенциала, получаемого двигателем. Далее, питающее напряжение поступает на сборку из 6-ти транзисторов (биполярных управляемых) с затвором, изолированным от прохождения тока с диодами.
Диоды защищают транзисторы от пробивания потенциала обратной полярности, которое образуется при действии с обмотками мотора. При закрывании и открывании перекрестных транзисторных пар образуются 3 смещенные на 120 градусов графика синуса управляемости обмоток мотора с частотой 25-50 герц.
Подключение регулятора производится зажимами с площадью сечения 6 мм2. Затягивать необходимо усилием 1,2 Н*м для основных контактов, 0,3 Н*м для управляющих контактов.
Частотно-регулируемый электропривод
Частотно-регулируемый, или частотно-управляемый привод (ЧРП, ЧУП) — система управления частотой вращения ротора асинхронного двигателя, которая включает в себя электродвигатель и преобразователь частоты.
Так как асинхронные двигатели могут вращаться на одной частоте, задаваемой им питающей сетью переменного тока, для управления ими используют преобразователи частоты.
Схема 1. Частотно-регулируемый привод.

Частотный преобразователь (ЧП) — это устройство, объединяющее в себе выпрямитель и инвертор. Выпрямитель преобразует переменный ток промышленной частоты в постоянный, а инвертор наоборот. Выходные тиристоры (GTO) или транзисторы (IGBT), открываясь и закрываясь при помощи электронного управления, формируют необходимое напряжение, аналогичное трехфазному. Возможность менять частоту напряжения позволяет изменять отдаваемую в нагрузку мощность не дискретно (как при механической регулировке), а непрерывно. За счет такого принципа действия частотно регулируемый привод может плавно регулировать параметры вращения двигателя.
Преимущества применения частотно регулируемых приводов для управления АД
- Облегчает пусковой режим привода.
- Позволяет двигателю долго работать, независимо от степени загрузки.
- Обеспечивает большую точность регулировочных операций.
- Позволяет контролировать состояние отдельных узлов в цепях промышленной электрической сети. За счет этого возможно вести постоянный учет количества времени, наработанного двигателями, чтобы потом оценивать их результативность.
- Наличие электронных узлов дает возможность диагностировать неисправности в работе двигателя дистанционно.
- К устройству можно подключать различные датчики обратной связи (давления, температуры). В результате скорость вращения будет стабильна при постоянно меняющихся нагрузках.
- При пропадании сетевого напряжения включается управляемое торможение и перезапуск.
-
В результате:
- повышается уровень КПД за счет чего можно сэкономить порядка 30-35 % электроэнергии;
- количество и качество конечного продукта возрастает;
- снижается износ комплектующих механизмов;
- возрастает срок службы оборудования.
Недостатки систем частотного регулируемого привода
- Создают сильные помехи, которые мешают другой электронике функционировать. Справиться с этой проблемой поможет установка в цепи управления фильтров высокочастотных помех, которые будут снижать степень такого влияния.
- Высокая стоимость ЧРП. Однако она окупится через 2-3 года.
Отрасли применения ЧРП
Список отраслей получается обширным, сложнее найти отрасль, где бы не применялись ЧП:
Нефтедобыча и переработка: насосное оборудование, привод аппаратов воздушного охлаждения (АВО) и градирен, комплексная автоматизация различных технологических линий.
Металлургия: приводы рольгангов, конвейеров, прокатных станов, наматывающих устройств волочильных станов, насосов, вентиляторов.
Машиностроение: привод обрабатывающих станков, насосы, конвейерные линии, полиграфические машины.
Горнодобывающее и обогатительное производство: дробилки, мешалки, конвейеры, песковые и пульповые насосы.
Химическая промышленность: насосы, мешалки, грануляторы, экструдеры, центрифуги, приводы дымососов и вентиляторов, АСУ.
Пищевая промышленность: грануляторы, экструдеры, мельницы, дробилки, куттеры, жом-прессы, этикетировочные аппараты, конвейеры, технологические линии, насосы, вентиляторы.
ЖКХ: различное насосное оборудование, АСУ.
Стройкомплекс: краны, подъемные механизмы.
Транспорт: судовой привод, электротранспорт.
Как выбрать частотный преобразователь
Следует принять во внимание:- Мощность и разновидность асинхронного электродвигателя.
- Диапазон и точность регулировки скорости.
- Необходимость точного поддержания момента и скорости вращения на валу двигателя.
- Соответствие конструкции устройства персональным пожеланиям.
СОВЕТ: если какой-то из параметров должен отвечать особым требованиям, то лучше предпочесть не потенциально подходящий частотно регулируемый электропривод, а тот, который будет классом выше.
Выполненные проекты
НПО «Винт», г. Москва. Подруливающие устройства для судового привода. Суда, оборудованные ими, получают большую маневренность при швартовке, проходе узкостей, тралении. Значительно снижается риск столкновения судов. Сокращается время разгрузки и погрузки, что дает экономию времени и денег.
ООО «Стройбезопасность», г. Тихорецк. Оснащение приводов башенных кранов. Это решение упрощает управление, дает возможность тонко регулировать скорость в большом диапазоне, приводит к отсутствию пусковых бросков тока.
ОАО «Тагмет», г. Таганрог. Рольганги щелевой закалочной печи. Обеспечивают точный догон трубы в зоне загрузки и отрыв на выходе и безаварийную работу оборудования. Главный экономический эффект применения частотных преобразователей — это повышение качества продукции.
ОАО «Ульяновский сахарный завод», р.п. Цильна, Ульяновская обл. Привод жом-пресса 500 кВт. Регулирует обороты по нагрузке: в результате стружка подается неравномерно и не происходит перебросов при этом поддерживается нужный уровень давления в шахте. Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
МУП «Водоканал», г. Новочебоксарск. Автоматизированная система оперативного диспетчерского управления (АСОДУ) водоснабжением г. Новочебоксарска. Кроме снижения прямых затрат на энергоресурсы, снизилась аварийность и улучшилось качество обслуживания.
ПИД регулирование в частотных преобразователях. Настройка
Для процессов системы требуется способность параметров к реагированию на внешнее действие и поддержание системных постоянных величин. Для примера, система насосов с клапанами отвода. Для каждого клапана поддержание потока в постоянном виде обеспечивает постоянное давление в трубах. Помпа в системе приводится в действие приводом, при открывании клапана скорость двигателя увеличивается и снижается при закрытии, чтобы поддерживать давление в трубах на одном уровне.
Настраивание ПИД-регулятора общего вида
Для такого поддержания давления существует прибор, который называется регулятором задания. Давление в трубах на датчике идет в сравнение с параметром заданного давления. Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор.
Регулятор пропорционального типа
Такой регулятор – главный, скорость задается в прямой зависимости от ошибки. При применении пропорционального регулятора система будет иметь ошибку. Малые значения коэффициента регулятора пропорционального типа дают вялость системы, а высокие параметры к колебаниям и нестабильности системы.
Регулятор интегрального типа
Такой регулятор применяется для удаления ошибки. Скорость увеличится до удаления ошибки (снизится при негативной ошибке). Небольшие значения суммирующей составляющей слишком оказывают влияние на деятельность регулятора в общем. При установлении больших значений происходит промахивание системы, она функционирует с перерегулированием.
Регулятор дифференциального типа
Такой регулятор измеряет скорость корректировки ошибки, применяет для повышения системного быстродействия, увеличивает регуляторное быстродействие в общем. Во время увеличения быстродействия регулятора повышается перерегулирование. Это обуславливает к системной нестабильности. Во многих случаях составляющая дифференциальная становится равной нулю или близкой к наименьшему значению для того, чтобы предотвратить это состояние. Она бывает полезной в позиционирующей системе.
Работа регулятора в обратном и прямом действии
Множество регуляторов имеют принцип прямого действия. Повышение скорости двигателя приводит к повышению переменной величины процесса. Это случай в системе насосов, давление это величина переменная процесса. Повышение скорости двигателя обуславливает повышение давления. Во многих системах повышение скорости двигателя обуславливает к снижению параметра переменной процесса. Температура вещества, которое обдувается вентиляционной системой теплообменника – процессная переменная величина: при повышении скорости вентиляционной системы температура вещества снижается. В этом разе нужно применить регулятор действия обратного вида.
Настраивание ПИД-регулятора
Для моторной управляемости системы настраивание ПИД-регулятора бывает сложным процессом. Расскажем, какие шаги для настройки могут сделать проще эту процедуру.
- Определите значение дифференциальной и интегральной равной нулю. Определите наибольшую скорость и контролируйте системную реакцию.
- Повышайте составляющую прямопропорционально и выполните первый пункт. Продолжайте действия до момента начала процесса с автоматическими колебаниями возле точки определения скорости.
- Снижайте пропорциональную величину, пока система не стабилизируется. Волны колебаний начнут затухать.
- Определите пропорциональную величину около 15% меньше этого постоянного пункта.
- Определяйте наибольшую скорость прерывисто, повышайте суммирующую составляющую до начала уменьшения колебаний скорости перед стабильным состоянием системы. Снижайте суммирующую составляющую до достижения системой определенной скорости без ошибки и колебаний.
- Во многих системах настраивание составляющей дифференциального вида не нужно. Если нужно быстродействие системы больше, то можно достигнуть этого путем настройки составляющей дифференциального вида. Устанавливайте скорость по интервалам, повышайте составляющую дифференциального вида, пока не стабилизируется система с наименьшим временем действия (повышайте медленно, избегая состояния нестабильности). Система станет оптимальной при одном перерегулировании.
- Контролируйте стабильность системы, устанавливая значения скорости с интервалами и периодами для гарантированной стабильности системы при плохом исполнении задания.
Настраивание датчика на 20 миллиампер ПИД-регулированием
1. Действия в программном меню
Управляющая панель частотного преобразователя А300 состоит из 3-уровневой структуры:
- Группы опциональных значений (1 уровень).
- Опциональные значения (2 уровень).
- Параметр опционального значения.
2. Настраивание характеристик электромотора и определение направления момента
Установить метод управления частотником в значении Р0-02:
- Р0-02=0 (настройка завода, пульт преобразователя).
- Р0-02=1 (входные команды внешнего управления D1-D7).
Установить характеристики номинального значения электромотора (применяйте параметры с таблички и паспорта электромотора):
- Мощность номинала Р1-01= установите значения.
- Напряжение номинала Р1-02= установите значения (по заводским настройкам 380 вольт).
- Ток номинала Р1-03= установите значения.
- Частота номинала Р1-04= установите значения (по заводским настройкам 50 герц).
- Обороты номинального значения Р1-05= установите значения.
После подсоединения и введения параметров нужно проконтролировать направление вращающего момента электромотора. После отключения меню программы на экране покажется 50 герц, клавишей «вниз» установите наименьшую частоту для задания направления вращающего момента. Для пуска мотора нажмите клавишу «пуск» (параметр Р0-02=0), определите направление момента вращения, затормозите мотор, нажав клавишу «стоп».
Если вращение не совпадает с направлением, то измените две любые фазы питания мотора (замену фаз производить при отключенном частотнике) или поменяйте параметр настройки Р0-09= (0-вперед, 1-назад). Еще раз проконтролируйте момент вращения, нажав клавишу «пуск», если направление момента вращения совпадает, то затормозите мотор, нажав клавишу «стоп». Нажмите клавишу «вверх» и возвратите настроенную частоту 50 герц.
3. Подсоединение датчика (выход на 20 миллиампер)
- Установку производить при выключенном питании частотного преобразователя.
- Напряжение датчика подсоединить к контакту «+24В», сигнал соединить с контактом «AI1», установить перемычку на контакты «COM» и «GND».
Переставить соединение «J1» в состояние «I».
4. Контроль обратной связи
- Подключите напряжение на частотный преобразователь, на экране возникнет подсветка 50 герц.
- Нажмите клавишу «сдвиг» 2 раза.
- На экране будет параметр обратной связи в интервале 0-10 (0-20 мА), зависит от настраиваемого параметра.
Связь обратного вида (4 мА).
- После подтверждения обратной связи нажмите три раза клавишу «сдвиг», появится на экране 50 герц.
- Установите наименьшее значение сигнала входа в величине Р4-13=2.00 (4 мА).
5.Как настраивать значение параметра ПИД-регулирования.
- Установите источник основной частоты Р0-03=8 (частоту определяет ПИД-регулятор).
- Поставьте значение ПИД-регулятора в значение РА-01= результат поддерживаемой величины в процентах (от 0 до 100%) от интервала датчика, РА-01= (результат поддерживаемого параметра/интервал датчика)*100%.
Пример установки значения:
Подсоединен датчик давления на 16 бар с сигналом выхода от 4 до 20 мА. Для давления в 10 бар нужно установить значение
РА-01=(10/16)*100%=62,5%
Произведите тестовый пуск. Проверяйте поддерживаемое значение параметра по приборам, дублирующим измерения (ротаметр, термометр, манометр). Если система регулировки функционирует нестабильно или долгий отклик на замену проверяемого параметра, то применяйте настройки значений РА-05, -06, -07. Эти значения предназначены для точной настройки ПИД-регулятора.
Пример использования регулирования ПИД
Данные
- Механизм вентиляторного управления.
- Характеристика градуировочная датчика давления, интервал 1000-5000 Па, ток 4-20 мА.
- Значение давления 1500 Па.
- Мощность механизма и инерционные данные вентилятора отсутствуют.
Наружные подключения
Датчик обратной связи подсоединен к токовому входу аналогового типа, датчик значения уставки к входу аналогового типа напряжения.
Обратная связь
Датчик связи определен по токовому выходу, входом связи обратного вида применяется токовый вход. Задается РR.10-00=02 (обратная связь с минусом по входу, повышение частоты выхода, повышает давление).
Отградуированная характеристика датчика
Сигнал связи обратного вида в масштабе
Вход связи обратного вида не создает масштаб по усилению и смещению. Применяя параметр PR10-01 можно изменять значение сигнала связи обратного вида в расчетах.
Применение параметра PR10-01 для корректировки значения сигнала связи обратного типа.
Значением PR10-01 можно корректировать значение сигнала связи обратного вида, который применяется в вычислениях. Интервал пропорциональности 0-10, по настройкам завода 1.
Сигнал связи обратного вида повышается в 2 раза перед установкой в ПИД-регулятор. Это равно снижению интервала входа в 2 раза.
Сигнал связи обратного вида снижается в 2 раза перед установкой в регулятор, это эквивалентно увеличению интервала входа в 2 раза. Сейчас интервал ограничен значением датчика.
Пример установки значения параметра PR10-01 (масштаб усиления обратной связи).
Интервал действия датчика:
-1000Ра – 5000Ра.
Наибольшее давление функционирования: 2000Ра.
Применяемая часть интервала работы датчика (закрепленная): -1000Ра-2000Ра.
Это будет равно: 2000Ра –(-1000Ра)
5000Ра –(-1000Ра) = 50%
Если интервал действия не больше 2000Ра с датчиком, то величина параметра
PR10-01 = 1/50%=2
Формула вычисления параметра PR10-01.
Наибольший сигнал датчика: MaxVal
Наименьший сигнал датчика: MinVal
Наибольший нужный сигнал связи обратного вида MaxFBVal
Величина значения ПИД (установленная частота).
Установленную частоту можно изменять операторами наклона и перемещения опции преобразования.
Направление момента вращения установки вентилятора не изменяется, лучше применять AVI вход с заданием значения PR 02-00=01.
PR10-01 (наибольшая частота).
Задать в PR01-00 величину наибольшей частоты механизма вентиляции (PR01-00 = 50 герц).
Наименьшая частота.
Наименьшая частота не оказывает влияния на действие регулировки.
Наклон и перемещение опции преобразования.
Задать PR04-00 AVI перемещение интервала.
PR04-01 AVI полярность.
PR04-02 AVI корректировка наклона.
Вращение производится в одну сторону, PR04-03 = 0 (по заводским настройкам).
Величина уставки.
Для установки величины входа интервал частоты рассчитывается 0-100%.
Установка значения уставки.
При функционировании вентилятора давлению в 1500 Ра равен сигнал датчика 10,67 мА. Величине уставки 1500 Ра равна частота выхода 42%*50 герц = 21 герц и 84%*50 герц = 42 герц.
Можно устанавливать значение в Ра. Если 100% интервала равно 2000 Ра, то при коэффициенте 00-05 = 2000/Fmax = 2000/50 = 40, установленная величина 1500 и задается 1500 Ра.
Интервал частоты выхода.
Верхняя граница частоты выхода при регулировке определяется формулой:
Fmax=Pr01-00хPr10-07.
ПИД-регулирование
Ускорение – замедление.
При взаимодействии с регулированием ПИД нужно время ускорения и замедления устанавливать минимальным для качественной регулировки.
Настраивание регулятора:
- Задать величину I для легкого отклика, без перерегулировки.
- Значение параметра для вентилятора не нужно, из-за замедления процесса.
- Задать другие значения величин.
Советы по настраиванию:
- Повышение Р разгоняет процесс, снижает ошибки.
- При большом Р появляется неустойчивость процесса.
- Снижение величины I ускоряет процесс, делает нестабильным.
- Быстрота дает снижение Р и I.
- Замедление вентилятора определяет большего значения Р.
- Задайте время ускорения и замедления наименьшим.
Автоматические регуляторы частоты вращения двигателя
Автоматический регулятор частоты вращения включает в себя собственно механический регулятор с центробежными грузами и систему управляющих рычагов, обеспечивающих связь регулятора и элементов настройки с дозирующей муфтой.
Автоматический регулятор частоты вращения служит для поддержания заданного скоростного режима с заданной точностью. Точность регулирования оценивается, в частности, степенью неравномерности, которая определяется как отношение разности частот вращения режима холостого хода и заданного режима по внешней скоростной характеристике к среднему их значению. Практически степень неравномерности определяется наклоном регуляторной характеристики.
Режим холостого хода означает работу двигателя без нагрузки. Таким образом, работа автоматического регулятора заключается в изменении величины топливоподачи при изменении нагрузки и постоянном положении рычага управления, т.е. педали акселератора. При этом формируется регуляторная характеристика данного скоростного режима. Всережимный автоматический регулятор обеспечивает регулирование дизеля во всем диапазоне рабочих режимов, а водитель задает требуемый скоростной режим, нажимая на педаль акселератора.
Двухрежимный регулятор частоты вращения обеспечивает автоматическое регулирование режима пуска и минимального и номинального режимов, а все промежуточные режимы находятся под управлением водителя, который воздействует непосредственно на дозирующий орган, изменяя величину топливоподачи.
Двухрежимные регуляторы более предпочтительны на автомобильных дизелях, поскольку непосредственное воздействие на дозирующий орган уменьшает расход топлива и выброс частиц при работе на неустановившихся режимах.
Скоростные и регуляторные характеристики топливоподачи насоса VE со всережимным и двухрежимным регуляторами представлены на рисунках а, б. Соответствующие обозначения кривых и характерных точек даны в спецификации к рисунку.

Рис. Скоростные и регуляторные характеристики топливоподачи: а — с двухрежиммым регулятором; б — с всережимным регулятором; 1 — пусковая подача; 2 — подача при полной нагрузке; 3 — участок работы положительного корректора; 4 — регуляторные характеристики; 5 — холостой ход минимального режима
Всережимные регуляторы
Схемы работы всережимного регулятора частоты вращения топливного насоса VE с системой рычагов и рабочими положениями дозирующей муфты на различных нагрузочных и скоростных режимах показаны на рисунках а, б, в, г.

Рис. Работа всережимного регулятора: а — положение при пуске; б — холостой ход минимального режима; в — режим уменьшения нагрузки; г — режим увеличения нагрузки; 1 — грузы регулятора; 2 — муфта регулятора, 3 — силовой рычаг; 4 — нажимной рычаг, 5 — пружина пусковой подачи; 6 — дозирующая муфта; 7 — отсечные отверстия в плунжере; 8 — плунжер; 9 — регулировочный винт холостого хода минимального режима; 10 — рычаг управления; 11 — регулировочный винт максимального режима; 12 — ось рычага управления; 13 — рабочая пружина регулятора; 14 — фиксатор пружины; 15 — пружина минимального режима; 16 — упор силового рычага; М2 — ось вращения рычагов 4 и 5; h, и h3 активный ход плунжера на различных режимах
Грузы регулятора 1 (обычно четыре груза) установлены в держателе, который получает вращение от приводной шестеренки. Радиальное перемещение грузов трансформируется в осевое перемещение муфты регулятора 2, что изменяет положение нажимного 4 и силового 3 рычагов регулятора, которые, поворачиваясь относительно оси М2. перемещают дозирующую муфту 6,определяя тем самым активный ход плунжера 8.
В верхней части силового рычага установлена пружина холостого хода 15, а между силовым и нажимным рычагами — пластинчатая пружина пусковой подачи 5. Рычаг управления 10 воздействует на рабочую пружину регулятора 13. второй конец которой закреплен в силовом рычаге на фиксаторе 14. Таким образом. положение системы рычагов и. следовательно, дозирующей муфты определяется взаимодействием двух сил — силы предварительной затяжки рабочей пружины регулятора, определяемой положением рычага управления, и центробежной силы грузов, приведенной к муфте.
Работа регулятора при пуске дизеля
Перед пуском дизеля, когда коленчатый вал еще не вращается и топливный насос не работает, грузы регулятора находятся в состоянии покоя на минимальном радиусе, а нажимной рычаг 4 (его другое название — рычаг пуска) под действием пружины пусковой подачи 5 смещен влево на рисунке а, имея возможность качания относительно оси М2. Соответственно нижний шарнирный конец рычага обеспечивает крайне правое положение дозатора 6 относительно плунжера 8. что соответствует пусковой подаче за счет увеличенного активного хода плунжера h2. Как только двигатель запустится, грузы регулятора расходятся и муфта 2 перемещается вправо на величину хода «а», преодолевая сопротивление достаточно слабой пусковой пружины 5. Рычаг 4 при этом поворачивается на оси М2 по часовой стрелке, перемещая дозирующую муфту в сторону уменьшения подачи (влево на рис. б).
Работа регулятора на минимальной частоте вращения холостого хода
При отсутствии нагрузки и положении рычага управления на упоре в регулировочный винт 9 дизель должен устойчиво работать на минимальной частоте вращения холостого хода в соответствии со схемой рисунка б. Регулирование этого режима обеспечивается пружиной холостого хода 15. усилие которой находится в равновесии с центробежной силой грузов, и в результате этого равновесия поддерживается подача топлива, соответствующая активному ходу плунжера h3. Работа дизеля на этом режиме соответствует точке 5 на характеристике первого рисунка. Как только скоростной режим двигателя выходит за пределы минимальной частоты вращения холостого хода, реализуется ход «с» силового рычага при сжатии пружины 15 под действием увеличивающейся центробежной силы грузов.
Работа регулятора на нагрузочных режимах
В эксплуатации дизеля со всережимным регулятором скоростной режим устанавливается водителем путем воздействия через педаль акселератора на рычаг управления 10. На рабочих режимах пружина пусковой подачи 5 и пружина 15 холостого хода не работают, и работа регулятора определяется предварительной деформацией рабочей пружины 13. При повороте рычага управления до упора 11 (рисунки в, г) в сторону увеличения скоростного режима и соответствующем растяжении рабочей пружины ее усилие передается на силовой рычаг 3 и затем через рычаг 4 на муфту регулятора 2, заставляя грузы 1 сходиться. Система рычагов при этом поворачивается относительно оси М2 против часовой стрелки на рисунке, перемещая дозирующую муфту 6 в сторону увеличения подачи до режимов внешней скоростной характеристики. Частота вращения коленчатого вала дизеля и соответственно, грузов регулятора при этом увеличивается, центробежная сила грузов и сопротивление последней усилию рабочей пружины также увеличиваются, и в какой-то момент наступает равновесие сил и равновесие положения всех элементов регулятора. При отсутствии изменения нагрузки двигатель работает на установившемся режиме при постоянной частоте вращения (не принимая во внимание естественную для ЛВС нестабильность вращения).
Если на этом режиме имеет место изменение нагрузки, то в работу вступает автоматический регулятор в соответствии со схемами, показанными на рисунках в, г. При уменьшении нагрузки частота вращения увеличивается, грузы регулятора расходятся и, преодолевая сопротивление рабочей пружины, перемещают муфту регулятора вправо (рисунок в). Система рычагов при этом поворачивается относительно оси М2 по часовой стрелке перемещая дозирующую муфту влево, в сторону уменьшения подачи. В результате формируется регуляторная ветвь 4 на первом рисунке. Если рычаг управления устанавливается в некоторое промежуточное положение, то, по сравнению с настройкой регулятора, показанной на рисунках в, г, будет образовываться одна из регуляторных характеристик, показанных пунктиром на первом рисунке б, т.е. регулятор в последнем случае начинает работать раньше — при меньшей частоте вращения.
На рисунке г показана работа регулятора при положении рычага управления на упоре 11 и при увеличении нагрузки. В этом случае частота вращения вала дизеля уменьшается, грузы регулятора сходятся, центробежная сила грузов уменьшается, и под действием усилия рабочей пружины муфта регулятора перемещается влево, а система рычагов 3 и 4 перемещает дозирующую муфту вправо, в сторону увеличения подачи. Если дизель до начала увеличения нагрузки работал на регуляторной ветви, то при увеличении подачи он будет выходить на более мощностной режим и затем на внешнюю скоростную характеристику. Если же дизель работает на внешней характеристике на номинальном или близком к нему режиме, то при увеличении нагрузки реализуется режим перегрузки, для преодоления которой дизель должен иметь достаточно высокий коэффициент приспособляемости. Положительное корректирование топливоподачи осуществляется на участке 3 характеристики с помощью положительного корректора или при соответствующем подборе характеристики топливоподачи ТНВД.
Корректоры топливоподачи
Корректирование топливоподачи в дизелях, положительное или отрицательное, осуществляется с целью формирования внешней скоростной характеристики двигателя при необходимости увеличить максимальный крутящий момент путем увеличения подачи при уменьшении частоты вращения от nном до nm на так называемом режиме перегрузки (положительное корректирование) или уменьшить дымление дизеля при работе на n < nm по внешней скоростной характеристике. Влияние корректирования на протекание внешней скоростной характеристики дизеля показано на рисунке ниже. Положительное корректирование необходимо для обеспечения заданного запаса крутящего момента двигателя.

Рис. Внешняя характеристике дизеля: Мe — крутящий момент, n — частота вращения, nм — частота вращения при максимально Me, nном — частота вращения номинального режима, n мин — минимальная частота вращения по внешней характеристике
Корректирование характеристики может быть осуществимо нагнетательным клапаном ТНВД или механическим корректором в регуляторе. С помощью механического корректора осуществляется также и отрицательное корректирование. Последнее обычно применяется в двигателях с целью уменьшения выбросов сажи при n < nм1, а также в двигателя с турбонаддувом и ТНВД без корректора по давлению наддува, т.е. без ограничения подачи в системе LDA.
Работа положительного и отрицательного корректоров
Устройство и работа положительного и отрицательного механических корректоров топливоподачи топливного насоса VE иллюстрируется рис. а, б.

Рис. Схема регулятора с положительным (а) и отрицательным (б) корректором топливоподачи: 1 — рычаг пусковой; 2 — пружины корректоров; 3 — рабочая пружина регулятора; 4 — силовой рычаг 5 — упор; 6 — рычаги корректоров; 7 — шток корректора; 8 — дозирующая муфта; 9 — пружина пусковой подачи; 10 — муфта регулятора; 11 — точка упора; Мг — ось вращения рычагов 1 и 4; М4 — ось вращения рычагов 1 и 6; ΔS — ход корректирования подачи
Начало действия прямого (положительного) корректора топливоподачи определяется жесткостью и предварительным сжатием его пружины, которые согласованы с соответствующим скоростным режимом дизеля. Работа положительного корректора происходит следующим образом. На номинальном режиме дозирующая муфта 8 занимает положение, обозначенное пунктиром на рис. а. Пружина корректора 2 при этом сжата из-за воздействия центробежной силы грузов через муфту 10 регулятора на рычаг 6, который нажимает на головку штока 7, поворачиваясь на упоре 5 в силовом рычаге 4. Рычаг 1 при этом повернут по часовой стрелке и дозатор обеспечивает цикловую подачу, которая соответствует требованиям номинального режима дизеля (см. Пунктир на рис. а). Если нагрузка на этом режиме увеличивается (режим перегрузки), частота вращения уменьшается, усилие со стороны муфты регулятора также уменьшается, и пружина корректора 2 через рычаг 6 поворачивает рычаг 1 против часовой стрелки, перемещая дозирующую муфту вправо, в сторону увеличения подачи на величину ΔS (рис. а).
Работа отрицательного корректора
При работе с минимальной частотой на внешней характеристике рычаг 6 корректора упирается в силовой рычаг в точке 5 (рис. б). Головка штока 7 корректора также упирается в силовой рычаг 4. При увеличении частоты вращения центробежная сила грузов, приведенная к муфте, преодолевает усилие пружины 2 корректора, сжимая ее. в результате чего рычаг 6 перемещается вправо на рисунке, в сторону головки штока, при этом общая ось рычагов М4 меняет свое положение. Одновременно рычаг 1 поворачивается относительно оси М2, перемещая дозирующую муфту 8 в сторону увеличения подачи. Ход корректирования ΔS определяется ходом сжатия пружины корректора до упора рычага 6 в головку штока 7. При работе дизеля на левой части внешней скоростной характеристики при увеличении нагрузки и уменьшении частоты вращения пружина 2 поворачивает рычаг 6 по часовой стрелке, а последний заставляет поворачиваться рычаг 1 относительно оси М2 по часовой стрелке, перемещая дозирующую муфту 8 в сторону уменьшения подачи, осуществляя, таким образом, отрицательное корректирование (область nмин < n < nм на рисунке).
Двухрежимные регуляторы
Устройство двухрежимного автоматического регулятора частоты вращения топливного насоса VE и его работа на различных режимах показаны на рисунках далее, имеющих общую спецификацию. Вал регулятора получает вращение от вала ТНВД через шестеренчатую повышающую передачу с передаточным отношением 1:1,6 и передает его держателю с четырьмя грузами.
Аналогичную конструкцию этого узла имеют топливные насосы VE с всережимными регуляторами, рассмотренные выше.
Величина топливоподачи изменяется при изменении положения дозирующей муфты 15, которое определяется равновесием центробежной силы грузов, приведенной к муфте, и силы от действия рабочих пружин регулятора, зависящей, в частности, от положения педали акселератора.
Режим пуска дизеля показан на рисунке. При неработающем двигателе грузы регулятора сведены и муфта 19 находится в крайнем левом положении. Рычаг корректора 16 и пусковой рычаг 18 прижимаются под действием пружины пусковой подачи 12 к муфте регулятора 19, поворачиваясь относительно оси М2. Таким образом, дозирующая муфта 15 перемещается нижним шарниром системы рычагов вправо на рисунке ниже, обеспечивая пусковую подачу. Педаль акселератора при пуске дизеля может оставаться в ненажатом положении. Величина пусковой подачи определяется активным ходом ΔS1.

Рис. Схема двухрежимного регулятора. Режим пуска дизеля: 1 — держатель грузов; 2 — грузы регулятора; 3 — серьга; 4 — ось рычага управления; 5 -пружина номинального режима; 6 — пружина частичного режима; 7 — регулировочный винт максимальной подачи; 8 — демпферная пружина; 9 — пружина холостого хода минимального режима; 10 — силовой рычаг; 11 — регулировочный рычаг; 12 — пружина пусковой подачи; 13 — поддерживающая пружина; 14 — плунжер ТНВД; 15 — дозирующая муфта; 16 — рычаг отрицательного корректора; 17 — пружина отрицательного корректора; 18 — пусковой рычаг; 19 — муфта регулятора; 20 — корпус пружин регулятора; 21 — отверстия отсечки подачи; шарниры рычажной системы регулятора: М1 — система рычагов в этой точке поддерживается двумя подвижными пальцами, установленными в рычаге 2; М4 — общая ось рычагов пускового и корректора; ΔS1 — ход дозирующей муфты.
После пуска двигателя грузы регулятора под действием центробежной силы расходятся и толкают муфту регулятора 19 вправо, преодолевая сопротивление пружины пусковой подачи 12. При этом головка штока рычага корректора 16 упирается в точке А в силовой рычаг 10, а ось М4 движется вправо на шарнире А до тех пор, пока усилие муфты регулятора окажется равным усилию пружины холостого хода 9. Соответственно, дозирующая муфта 15 перемещается шарниром М2 влево до установления подачи холостого хода, что соответствует схеме на рисунке.

Рис. Работа регулятора на холостом ходу минимального режима
На рисунке показано взаимодействие элементов регулятора при работе дизеля на частичных скоростных режимах, когда педаль акселератора слегка нажата. Последовательность, с которой вступают в работу пружины регулятора, определяется их жесткостью и предварительной деформацией. Первой работает демпферная пружина 8. за ней следует пружина частичного режима 6 и, наконец, пружина номинального режима 5.
Рычаг управления соединяется с педалью акселератора. При нажатии на нее сжимается демпферная пружина 8 и силовой рычаг притягивается влево, в результате чего дозирующая муфта перемещается вправо, в сторону увеличения подачи с соответствующим увеличением частоты вращения. Муфта регулятора 19 из-за увеличения центробежной силы грузов нажимает на рычаг корректора, который упирается.в силовой рычаг в точке в результате чего пружина холостого хода 9 максимально сжимается, и далее силовой рычаг уже двумя шарнирными точками А и В перемещается вправо, вместе с осью М2. В этих условиях, когда силовой рычаг движется вправо, а корпус пружин под действием водителя влево, пружина частичной нагрузки сжимается до момента достижения баланса сил. При уменьшении нагрузки и увеличении частоты вращения силовой рычаг будет перемещаться под действием муфты регулятора 19 вправо на ход ΔS2 пружины 6, а дозирующая муфта 15 влево, в сторону уменьшения подачи до достижения установившегося скоростного режима дизеля.

Рис. Работа регулятора на частичном скоростном режиме

Рис. Работа регулятора при полной нагрузке
Работа регулятора дизеля при полной нагрузке иллюстрируется рисунке. В этом случае педаль акселератора нажата до упора рычага управления в регулировочный винт максимального режима. Силовой рычаг 10 при этом оказывается на упоре М3, а пружины стартовая, минимального холостого хода 9, демпферная 8 и частичной нагрузки 6 — в полностью сжатом состоянии. Муфта регулятора 19 находится в равновесии под действием противоположно направленных центробежной силы грузов и силы предварительной затяжки рабочей пружины 5. Подача топлива на режиме полной нагрузки определяется активным ходом плунжера, обозначенным двумя стрелками у дозирующей муфты 15. Рассматриваемый здесь двухрежимный регулятор оснащен отрицательным корректором топливоподачи. При работе дизеля на левой ветви внешней скоростной характеристики, при n < nm пружина 17 отрицательного корректора разжимается и через систему рычагов перемещает дозирующую муфту 15 в сторону уменьшения подачи, отодвигая внешнюю характеристику от предела дымления.

Рис. Работа отрицательного корректора
Режим максимальной частоты вращения холостого хода и формирование соответствующей регуляторной характеристики имеют место при уменьшении нагрузки двигателя, работающего на режиме полной (номинальной) мощности. В этом случае частота вращения вала двигателя и грузов регулятора увеличивается, и последние перемещают муфту 19 вправо, которая заставляет пружину регулятора 5 сжиматься и за счет этого вращает систему рычагов по часовой стрелке относительно оси М2, уменьшая топливоподачу до величины подачи холостого хода. Этот процесс показан на рисунке.
Если при полном сбросе нагрузки имеет место неконтролируемое увеличение частоты вращения, опасное для двигателя, регулятор полностью прекращает подачу топлива в цилиндры дизеля. В этом случае работа регулятора происходит в соответствии с рисунке, только при частоте вращения большей, чем на режиме максимальной частоты вращения холостого хода. Дозирующая муфта при этом еще больше перемещается влево, полностью открывая отсечные отверстия 21, в результате чего все топливо из камеры высокого давления ТНВД возвращается во внутреннюю полость корпуса насоса и впрыскивание топлива прекращается.

Рис. Работа регулятора на холостом ходу максимального режима
График скоростных характеристик топливоподачи рассмотренного выше двухрежимного регулятора показан на рисунке, назначение различных кривых на характеристике обозначено подрисуночными подписями. Наличие пружины частичных режимов в регуляторе позволяет получить большую плавность и устойчивость регулирования на режимах малых нагрузок и частот вращения. В остальном характеристики рассмотренного выше двухрежимного регулятора аналогичны общей характеристике.

Рис. Скоростные характеристики топливоподачи ТНВД с двухрежимным регулятором: а — пусковая подача, б — участок уменьшения подачи после пуска дизеля, в — ход при сжатии пружины частичного режима, г — область управления подачей водителем, д — регуляторные характеристики максимального режима
Регуляторы частоты вращения.
Система питания дизельного двигателя
Регуляторы частоты вращения
Работа дизелей, оснащенных ТНВД плунжерного типа, характеризуется крайне неустойчивой частотой вращения. Во время работы машины нагрузка постоянно меняется и соответственно меняется нагрузка на двигатель. Характер изменения нагрузки может быть достаточно интенсивным: от резкого увеличения, например, при разгоне или движении на подъем (наброс нагрузки), до резкого снижения, например, при движении на спуске (сброс нагрузки).
Так, при резком снижении внешней нагрузки дизеля частота вращения коленчатого вала увеличивается, что вызывает увеличение цикловой подачи топлива.
Это происходит вследствие сокращения времени прохождения плунжером окон втулки и соответственно сокращения количества вытесняемого топлива из надплунжерного пространства через эти окна.
Кроме того, регулятор опережения впрыска топлива при увеличении оборотов корректирует начало подачи и, таким образом, обороты двигателя прогрессирующе возрастают.
Данное явление тем более характерно, чем меньше активный ход плунжера. Возрастание цикловой подачи приводит к дальнейшему росту частоты вращения клеенчатого вала, и если нагрузка не увеличится, то это может привести к «разносу» двигателя (саморазрушению)
Увеличение внешней нагрузки двигателя и снижение вследствие этого частоты вращения коленчатого вала, наоборот, приводит к увеличению количества перетекающего топлива в окна втулки и соответственно к сокращению поданного количества топлива через штуцер к форсунке.
Поэтому дизели при возрастании внешней нагрузки склонны к останову.
Водитель не всегда может среагировать на колебания нагрузки, поэтому данную функцию выполняют специальные следящие устройства – регуляторы частоты вращения, предназначенные для автоматического поддержания частоты вращения коленчатого вала в заданных пределах.
Регуляторы частоты вращения классифицируют:
- по воздействию на орган управления – прямого и непрямого действия;
- по поддержанию заданного режима – одно-, двух- и всережимные.
Регуляторы прямого действия воздествуют непосредственно на орган управления подачей топлива (рейку ТНВД или дроссельную заслонку карбюратора). Регуляторы непрямого действия воздействуют на них через дополнительную систему – электрический или гидравлический усилитель.
Однорежимные регуляторы поддерживают только один скоростной режим, чаще всего максимальный, не позволяя двигателю превышать предельно допустимые обороты и работать вразнос.
На автомобильных двигателях регуляторы должны ограничивать, как минимум, максимальную и минимальную частоты вращения коленчатого вала. Такие регуляторы называются двухрежимными.
На отечественных дизелях используются всережимные регуляторы частоты вращения, которые автоматически поддерживают заданную водителем частоту вращения коленчатого вала на всем диапазоне нагрузок.
***
Всережимный регулятор частоты вращения
Всережимные регуляторы частоты вращения устанавливаются на двигателям марок «ЯМЗ», «КамАЗ», двигателе ММЗ Д-235.12 (автомобиль ЗИЛ-5301 «Бычок»).
На рисунке 1 приведена конструкция регулятора двигателя ЯМЗ-238 и схема его работы.
Данный регулятор устанавливается на заднем торце топливного насоса высокого давления (ТНВД). Ведущее зубчатое колесо 1 регулятора приводится во вращение от кулачкового вала топливного насоса через резиновые сухари 27, которые в ней установлены. Резиновые сухари поглощают ударные нагрузки при резком изменении частоты вращения. Ведомое зубчатое колесо 3 установлено в корпусе 4 на двух шариковых подшипниках.
Ведущее и ведомое зубчатые колеса образуют повышенную передачу с целью увеличения чувствительности регулятора. Ведомое зубчатое колесо изготовлено заодно с валиком, на который напрессована державка 5.
На осях державки шарнирно закреплены два грузика 29, которые своими роликами упираются в торец муфты 26, которая через радиально-упорный подшипник и пяту 25 передает усилие силовому рычагу 19, подвешенному на оси 13.
Пята регулятора с помощью рычага 20 и тяги 11 связана с рейкой 6 топливного насоса, которая при расхождении грузиков перемещается в сторону уменьшения подачи топлива. В верхней части к рычагу 20 присоединена пружина 8, а в нижней части рычага запрессован палец 23, который входит в паз кулисы 24. Кулиса соединяется со скобой 21 останова двигателя через распложенную внутри кулисы пружину, предохраняющую механизм регулятора от чрезмерных усилий при выключении подачи топлива.
Пружина 14 регулятора одним концом соединена с рычагом 12, который жестко связан с рычагом 9 управления регулятором, а вторым – с двуплечим рычагом 15. Усилие пружины передается с двуплечего рычага на винт 16.
Регулятор работает следующим образом.
При вращении кулачкового вала ТНВД и валика с державкой 5 центробежная сила грузиков 29 стремится развести их в стороны и через ролики 30 переместить муфту 26 с пятой 25 вправо. Этому препятствует пружина 14, которая тянет нижнее плечо рычага 15 вверх и через винт 16 и рычаг 19 отжимает пяту 25 влево.
Таким образом, на муфту 26 и пяту действует две силы: направленная вправо центробежная сила грузиков и направленная влево сила, создаваемая пружиной 14.
При определенном натяжении пружины развивается частота вращения, при которой эти две силы взаимно уравновешиваются. Тогда все подвижные детали регулятора (грузики, муфта, пята, рычаги 15, 19 и 20, тяга 11), а также рейка 6 и плунжеры занимают положение, обеспечивающее работу двигателя с заданной частотой вращения.
Если нагрузка на двигатель уменьшится (например, при движении автомобиля под уклон), частота вращения коленчатого вала начнет возрастать и увеличивающаяся сила грузиков передвигает муфту с пятой вправо (при этом пружина, натянутая водителем через рычаги 9 и 12, еще больше растянется). Пята повернет рычаг 20 по часовой стрелке, и тяга 11 выдвинет рейку из корпуса ТНВД, рейка повернет плунжеры, и подача топлива уменьшится, что приведет к уменьшению частоты вращения коленчатого вала двигателя.
Если нагрузка увеличится (автомобиль движется на подъем или по труднопроходимому участку местности), частота вращения коленчатого вала начнет падать и вместе с тем уменьшаться центробежная сила грузиков, а так как сила натяжения пружины заданная водителем остается неизменной, то ее усилия становится достаточно, чтобы передвинуть рейку ТНВД в сторону увеличения подачи топлива.
В результате увеличения подачи топлива частота вращения коленчатого вала сохраняется и будет таким образом поддерживаться постоянной при заданном водителем через педаль управления положении рейки насоса.
Водитель может по своему усмотрению изменить частоту вращения коленчатого вала, а значит, и скорость движения автомобиля с помощью педали управления подачей топлива, установленной в кабине. При нажатии на педаль система тяг и рычагов перемещает тягу 28 влево, рычаг 9 поворачивает валик с рычагом 12 против часовой стрелки и сильнее натягивает пружину 14.
Усилием пружины детали 15 и 19 перемещают пяту 25 и рычаг 20 влево, и рейка перемещается влево (в сторону увеличения подачи топлива), в результате чего частота вращения увеличивается.
Когда водитель освобождает педаль подачи топлива полностью, двигатель работает на режиме холостого хода. Натяжение пружины 14 регулятора на этом режиме регулируется винтами 16 и 17.
Чтобы заглушить двигатель, водитель должен вытянуть кнопку «стоп», расположенную в его кабине. Тогда трос, на конце которого закреплена кнопка, повернет скобу 21 с кулисой 24 в положение, показанное на рис. 2, б штрихпунктирной с двумя точками линией, а кулиса поворачивает рычаг 20 вокруг его оси, закрепленной в пяте 25. Нижний конец рычага 20 переместится влево, верхний конец его переместит рейку еще немного назад и подача топлива в цилиндры прекратится.
***
Регулятор ТНВД серии 33
Регулятор насоса серии 33 (двигатель КамАЗ-740) скомпонован в развале секций насоса (внешний вид регулятора КамАЗ-740 на рисунке в верху страницы).
Привод вала регулятора – от вала насоса через три шестерни, ведущая из которых соединена с валом насоса через резиновые сухари.
На валу регулятора отлита крестовина 2 (рис. 3), на котором шарнирно закреплены двуплечие рычаги с грузами 3. Одни из плеч рычагов упираются в муфту 4, а она – в промежуточный рычаг 5, управляющий верхней рейкой 1. Этот рычаг установлен на одном шарнире с главным рычагом 6, на который воздействует главная пружина 9.
Рейка нижнего (левого) ряда перемещается коромыслом 18 в обратную сторону. Регулятор имеет корректор и пружину обогатителя.
Работа этого регулятора (рис. 3, в) аналогична работе рассмотренного выше всережимного регулятора двигателя ЯМЗ-238.
***
Двухрежимный регулятор частоты вращения
Особенностью двухрежимного регулятора частоты вращения (рис. 2) заключается в том, что при работе дизеля на малых частотах вращения коленчатого вала грузики 6 уравновешиваются только внешней пружиной 2. Любое изменение частоты вращения нарушит равновесие между центробежной силой грузиков 6 и усилием пружины 2, что приведет к перемещению муфты 5 и рейки 4 в сторону увеличения или уменьшения подачи топлива.
В результате частота вращения будет удерживаться в заданном диапазоне.
При переходе на режим частичных нагрузок водитель, воздействуя на педаль управления подачей топлива, увеличивает частоту вращения коленчатого вала. При этом грузики расходятся и, преодолевая сопротивление внешней пружины, доводят муфту 5 до соприкосновения с внутренней пружиной 3.
Однако пружина 3 имеет значительную жесткость и установлена с предварительной деформацией, поэтому в дальнейшем регулятор исключается из работы, так как грузики не могут преодолеть совместное сопротивление двух пружин, а перемещение рейки ТНВД происходит непосредственно под воздействием водителя на педаль, систему тяг, рычага 1 и рейки 4.
При достижении предельной частоты вращения центробежной силы грузиков становится достаточно для преодоления сопротивления пружин, и регулятор снова включается в работу.
В результате муфта 5 и рейка 4 перемещаются в сторону уменьшения цикловой подачи топлива.
На рис. 4 показан двухрежимный регулятор частоты вращения, устанавливаемый на двигателе ЗИЛ-645. Регулятор обеспечивает устойчивую работу на холостом ходу при частоте вращения коленчатого вала 600…650 об/мин.
Регулятор имеет два цилиндрических пустотелых грузика 13, установленных на крестовине 14. Внутри каждого грузика находятся пружины: наружная пружина для ограничения частоты вращения холостого хода и внутренняя для ограничения максимальной частоты вращения; тарелки 20 пружин с регулировочной гайкой.
При неподвижном коленчатом вале грузики прижаты пружинами к крестовине. Во время вращения коленчатого вала грузики под действием центробежных сил расходятся, сжимая наружную пружину. При этом угловой рычаг 10 перемещает ползун 9 углового рычага влево, который при помощи оси 8 кулисы выдвинет рейку насоса вправо, уменьшая подачу топлива и ограничивая частоту вращения коленчатого вала.
Если частота вращения коленчатого вала станет меньше 650 об/мин, регулятор начнет задвигать рейку, увеличивая подачу топлива. Таким образом, на холостом ходу ползун непрерывно перемещается, вследствие чего изменяется подача топлива и поддерживается заданная частота вращения.
При достижении частоты вращения 2850 об/мин центробежная сила грузиков начнет преодолевать сопротивление пружин, под действием системы рычагов рейка перемещается, уменьшая подачу топлива и частоту вращения коленчатого вала. На этом режиме ползун также перемещается, в результате чего частота вращения составляет 2850…2950 об/мин.
Между минимальным и максимальным значениями частоты вращения изменение подачи топлива осуществляется рычагом управления подачей топлива, связанным с педалью подачи топлива.
***
Система подачи воздуха, наддув и дымовой корректор