


Регулирование скорости вращения электродвигателей постоянного тока
Настоящий способ регулирования скорости может быть легко осуществлен, однако он имеет ряд существенных недостатков, ограничивающих его применение: значительные потери энергии в регулировочном реостате; диапазон регулирования скорости непостоянен и зависит от нагрузки; невозможность регулирования при малых нагрузках.
В отличие от пускового реостата регулировочный реостат должен быть рассчитан на длительную работу при полном токе нагрузки, поскольку он оказывается включенным не только кратковременно во время пуска, но и во время работы двигателя на заданной скорости.
Регулирование скорости вращения изменением тока возбуждения (величины магнитного потока). Из рассмотрения механических характеристик видно, что, вводя дополнительное сопротивление в цепь возбуждения, можно регулировать скорость вращения двигателя вверх от номинальной его скорости. Жесткость механических искусственных характеристик при этом мало изменяется.
2. Электродвигатели с последовательным возбуждением
Регулирование скорости вращения изменением сопротивления в цепи якоря. Как видно из механической характеристики двигателя, вводя дополнительное сопротивление в цепь якоря, можно регулировать скорость вниз от номинальной скорости двигателя. Жесткость характеристики уменьшается по мере увеличения дополнительного сопротивления. Диапазон регулирования скорости не превышает 2:1, 3:1 и зависит от нагрузки.
Регулирование скорости рассмотренным методом связано с большими потерями энергии в регулировочном реостате, но несмотря на это, данный способ находит применение в крановых установках и электротележках ввиду своей простоты. Указанные механизмы работают со значительными перерывами, что уменьшает потерю энергии на нагрев сопротивлений реостатов.
Указанные механизмы работают со значительными перерывами, что уменьшает потерю энергии на нагрев сопротивлений реостатов.
Регулирование скорости вращения изменением магнитного потока возбуждения. Для двигателей с последовательным возбуждением применяются два основных способа регулирования скорости изменением магнитного потока Ф, а именно, путем шунтирования либо обмотки возбуждения, либо обмотки якоря.
При шунтировании обмотки возбуждения реостатом Яш (рис. 16) часть тока, проходящего по якорю двигателя, ответвляется в реостат, вследствие чего величина тока в обмотке возбуждения, а следовательно, и магнитного потока, создаваемого ею, уменьшается и скорость двигателя возрастает. При уменьшении величины сопротивления шунтирующего реостата искусственные скоростные характеристики на рис. 16 располагаются выше естественной характеристики. Таким образом, регулирование скорости этим методом происходит в сторону ее повышения по отношению к номинальной скорости. Предел регулирования скорости вращения двигателя не поевышает 2 : 1 при условии постоянства мощности.
Рис. 16. Схема регулирования скорости электродвигателя последовательного возбуждения шунтированием обмотки возбуждения
а —схема; б — скоростные характеристики
При уменьшении величины сопротивления шунтирующего реостата увеличивается ток, протекающий по обмотке возбуждения, вследствие чего искусственные скоростные характеристики (рис. 17,6) двигателя рас полагаются ниже естественной характеристики. При переходе скорости вращения за пределы отрицательных моментов двигатель не отдает энергии в сеть, но работает генератором на шунтирующее сопротивление, так как э. д. с. двигателя не может быть больше приложенного напряжения сети. Таким образом, регулирование скорости этим методом происходит в сторону понижения по отношению к номинальной скорости. Возможен диапазон регулирования скорости (4—5) : 1. Регулирование скорости шунтированием обмотки якоря применяется в тех случаях, когда необходимо получить характеристики на низких скоростях, более жесткие, чем при реостатном регулировании.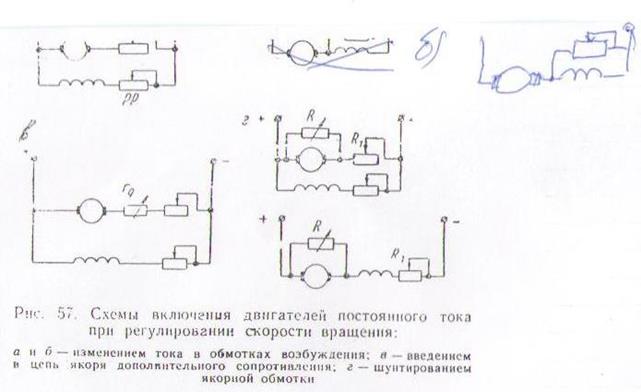
Рис. 17. Схема регулирования скорости электродвигателя последовательного возбуждения шунтированием обмотки якоря
а — схема; б — скоростные характеристики
3. Специальные схемы включения электродвигателей постоянного тока (система генератор — двигатель, ионный привод, привод с магнитным усилителем)
Для ряда производственных механизмов диапазон регулирования скорости рассмотренными выше способами оказывается недостаточным. Более широкое регулирование скорости возможно за счет изменения величины подводимого к двигателю напряжения. При этом он должен иметь независимое возбуждение. Регулирование скоростей в этих условиях возможно в широких пределах вверх и вниз от естественной характеристики. Понижение подводимого к двигателю напряжения вызывает смещение механических характеристик к оси абсцисс, повышение —смещение их в обратном направлении.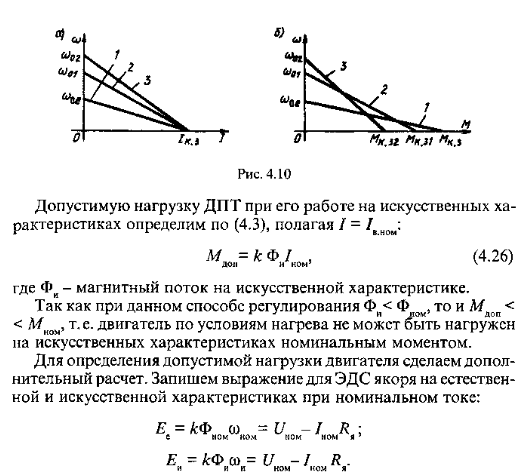
Регулирование скорости вращения путем изменения напряжения осуществляется при включении электродвигателей по особым схемам с питанием их либо от специального генератора с регулируемым напряжением, либо от ионных преобразователей. Такие способы регулирования скорости отличаются высокой экономичностью, большой плавностью регулирования и возможностью использовать генераторное торможение с отдачей энергии в сеть. Основной его недостаток заключается в необходимости иметь дополнительное электрооборудование (генераторы, сетевой двигатель и др.), позволяющее изменять величину подводимого к двигателю напряжения.
Принципиальная схема системы Г—Д приведена на рис. 18. Основными элементами оборудования являются: ПД— асинхронный или синхронный приводной двигатель, вращающий генератор Г и возбудитель В; Д — двигатель исполнительного механизма.
Рис. 18. Принципиальная схема привода постоянного тока по системе генератор — двигатель (Г — Д)
Механические характеристики электропривода по системе Г—Д представлены на рис.
Рис. 19. Механические характеристики электропривода постоянного тока по системе генератор — двигатель
Перед пуском в ход двигатель исполнительного механизма в системе Г—Д (см. рис. 18) должен иметь полное возбуждение [(RB. д=0), а группа «приводной двигатель—генератор» должна находиться во вращении со снятым с генератора возбуждением. Далее, путем постепенного повышения напряжения генератора (уменьшая сопротивления его реостата возбуждения Rг ) двигатель исполнительного механизма плавно доводят до номинальной скорости.
В зависимости от требуемого направления вращения двигателя пуск осуществляется замыканием контакторов KB или КН (с помощью специальной аппаратуры).
Применяемый в системе Г—Д метод пуска весьма экономичен, так как в главной цепи якоря машины отсутствуют пусковые сопротивления. Поскольку управление пуском осуществляется в цепи возбуждения генератора, обладающей сравнительно малой мощностью (2— 6% номинальной мощности генератора), применяемая аппаратура управления имеет малые габариты, вес и стоимость.
Для того чтобы вызвать тормозной режим двигателя в системе Г—Д с последующей его остановкой, достаточно разомкнуть контакты контакторов KB и КН. Цепь возбуждения генератора будет отключена от питающей сети, однако ток возбуждения генератора не исчезнет мгновенно ввиду наличия разрядного сопротивления Rp, шунтирующего обмотку возбуждения генератора. В обмотке возбуждения генератора будет наводиться э. д. с. самоиндукции и тем самым поддерживаться ток в цепи, замкнутой на разрядное сопротивление.
Так как поток возбуждения двигателя исполнительного механизма остается неизменным, то его э. д. с. будет больше, чем уменьшающаяся э. д. с. генератора.
В результате этого двигатель начинает работать в режиме генератора за счет кинетической энергии вращающихся масс, а генератор — в режиме двигателя. Поскольку поток возбуждения генератора непрерывно уменьшается, его скорость, а следовательно, и скорость вращения приводного двигателя ПД будет возрастать. Когда она превысит синхронную скорость двигателя ПД, последний начнет работать в генераторном режиме с отдачей электроэнергии в сеть. Отдача электроэнергии в сеть продолжается вплоть до полной остановки двигателя.
Если торможение механизма по условиям производственного процесса производится часто, то данный метод торможения представляет значительную экономическую выгоду.
Рассматриваемая система прйвоДа позволяет иметь широкий диапазон регулирования до 100 : 1 с плавным изменением скорости, получить специальные, так называемые экскаваторные механические характеристики двигателей механизмов, работающих на упор, например механизм напора мощных экскаваторов.
В современных электроприводах, выполненных по системе Г—Д, наибольшее распространение в качестве возбудителей генераторов получили электромашинные усилители с поперечным полем. Применяются также магнитные и электронные усилители.
Электромашинный усилитель дает возможность управлять мощными установками посредством аппаратов и машин малой мощности. Эти же свойства усилителя за счет введения обратных связей по току, напряжению или скорости позволяют в некоторых приводах поднять диапазон регулирования скорости до 200 : 1.
Ниже рассматривается принцип действия электромашинного усилителя (ЭМУ) с поперечным полем (рис. 20). Электромашинный усилитель приводится в действие асинхронным двигателем, который монтируется в одном корпусе с усилителем. Первая пара щеток ЭМУ аа замыкается накоротко, ко второй паре 66 подсоединяется внешняя нагрузка, обычно обмотка возбуждения генератора.
Конструктивные особенности ЭМУ позволяют в том же пространстве, где расположена обмотка ОУ, разместить еще несколько обмоток управления без значительного увеличения габаритов.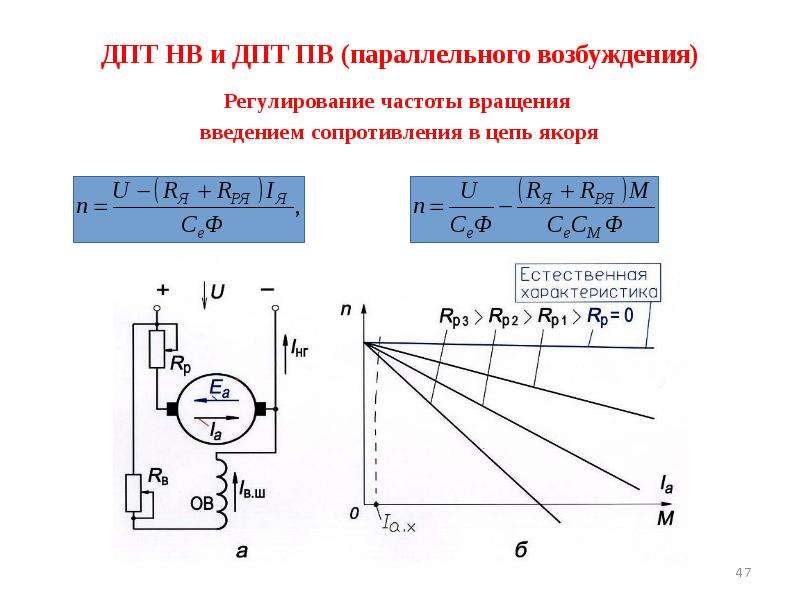 С помощью дополнительных обмоток управления обычно осуществляются обратные связи.
С помощью дополнительных обмоток управления обычно осуществляются обратные связи.
Величина коэффициента усиления по мощности электромашинных усилителей с попеоечным полем составляет 4000— 10000.
Диапазон регулирования скорости двигателя в рассмотренной схеме без обратной связи равен 1 : 7, а с обратной связью для той же системы он составляет 1 : 33.
В случае необходимости регулирования скорости оператор перемещает скользящий контакт реостата Ra. у в цепи обмотки управления ЭМУ. Применяя ЭМУ с обратными связями, можно получать жесткие механические характеристики.
Недостатки, отмечавшиеся для привода по системе Д, в значительной мере устраняются при питании приводных двигателей постоянного тока от ионных и полупроводниковых преобразователей. Для приводов небольшой мощности используются тиратроны, а для приводов большой мощности — мощные управляемые ртутные вентили, а также полупроводниковые вентили — тиристоры.
Рис. 21. Схема электропривода по системе генератор — двигатель с электромашинным усилителем в качестве возбудителя
Систему, состоящую из двигателя постоянного тока и питающего его ионного преобразователя, называют ионным приводом. Ионный преобразователь в такой системе выполняет не только функции выпрямления переменного тока, но и функции управления двигателем, т. е. пуск, регулирование скорости, торможение и т. п. Достигается это изменением величины напряжения на стороне выпрямленного тока при помощи сеточного управления, регулирующего момент зажигания дуги в вентилях.
Ионный преобразователь в такой системе выполняет не только функции выпрямления переменного тока, но и функции управления двигателем, т. е. пуск, регулирование скорости, торможение и т. п. Достигается это изменением величины напряжения на стороне выпрямленного тока при помощи сеточного управления, регулирующего момент зажигания дуги в вентилях.
Принцип сеточного регулирования основан на том. что при наличии на сетке отрицательного (запирающего) напряжения дуга на главных анодах не зажигается и ток от анода к катоду не проходит.
Принципиальная схема ионного привода с тиратронами представлена на рис. 22. Двигатель постоянного тока Д получает питание через три тиратрона, включенных во вторичную цепь трансформатора Тр. Тиратроны, как и ртутные вентили, обычно включаются в сеть через трансформаторы. Наличие трансформаторов объясняется необходимостью получения напряжения
требуемой величины на стороне выпрямленного тока. Двигатель. подключен к нулевой точке трансформатора 0 и общей точке катодов тиратронов К. Для сглаживания пульсации тока в цепь двигателя включена реактивная катушка-дроссель ДР.
Для сглаживания пульсации тока в цепь двигателя включена реактивная катушка-дроссель ДР.
Как указывалось, регулирование сеточного напряжения производится фазорегулятором ФР. Там же между сетками и фазорегулятором включены так называемые пиковые трансформаторы ПТр, дающие возможность получить более резкие изменения напряжения на сетке, а отсюда более четкую фиксацию момента зажигания тиратрона. Цепи накала тиратронов присоединяются к отдельным обмоткам трансформатора, не показанным на схеме.
Механические характеристики системы ионный преобразователь— двигатель подобны характеристикам системы генератор—двигатель с некоторым искажением в зоне, близкой к холостому ходу двигателя. Для повышения жесткости механических характеристик и увеличения диапазона регулирования скорости вращения двигателя в этих системах используют обратные связи по току и напряжению якоря двигателя.
Рис. 22. Схема ионного привода (с тиратронами и фазорегулятором)
Применение системы с ионными преобразователями экономичнее по стоимости, чем системы с вращающимися преобразователями, требует меньшей площади производственного помещения, кроме того, данная система имеет более высокий к. п. д. и практически безынерционное сеточное управление. Основным недостатком ионных преобразователей является низкий коэффициент мощности, который снижается при глубоком регулировании, примерно пропорционально уменьшению скорости вращения.
п. д. и практически безынерционное сеточное управление. Основным недостатком ионных преобразователей является низкий коэффициент мощности, который снижается при глубоком регулировании, примерно пропорционально уменьшению скорости вращения.
В последние годы были разработаны полупроводниковые (кремниевые) управляемые вентили — тиристоры, которые по своим функциям в схемах преобразователей аналогичны тиратронам. Тиристоры, очевидно, найдут в будущем широкое применение для приводов средней и большой мощности вместо тиратронов и управляемых ртутных вентилей.
В приводах малой и средней мощности в настоящее время стали широко применять систему регулирования скорости двигателя с помощью магнитных усилителей. Принцип действия магнитного усилителя основан на явлении изменения индуктивного сопротивления переменного тока путем изменения подмагничивания сердечников постоянным током. Имеются приводы с магнитными усилителями, питающимися от сетей однофазного и трехфазного тока. Комплектные установки с магнитными усилителями, выпускаемые промышленностью мощностью от 0,1 до 8 кет, позволяют получать диапазон регулирования скорости порядка 10 : 1 при плавном регулировании. Они надежны в эксплуатации и имеют высокий к. п. д.
Они надежны в эксплуатации и имеют высокий к. п. д.
Механические характеристики двигателя при таком способе регулирования скорости — мягкие вследствие значительного снижения напряжения на обмотке якоря с увеличением нагрузки двигателя.
Магнитные усилители могут иметь несколько обмоток управления и регулировать функции нескольких параметров. Они обладают большим коэффициентом усиления по мощности. Существенным недостатком привода с магнитным усилителем является его значительная инерционность: при резком изменении нагрузки на валу двигателя могут возникнуть колебания скорости и новое установившееся состояние наступает только спустя 0,2—2 сек.
Рис. 23. Схема электропривода с магнитным усилителем
Способы регулирования частоты вращения якорей тяговых двигателей постоянного тока и реостатный пуск
Способы регулирования частоты вращения. Частоту вращения якорей тяговых двигателей можно регулировать, изменяя напряжение і/л на зажимах двигателя или магнитный поток Ф, т.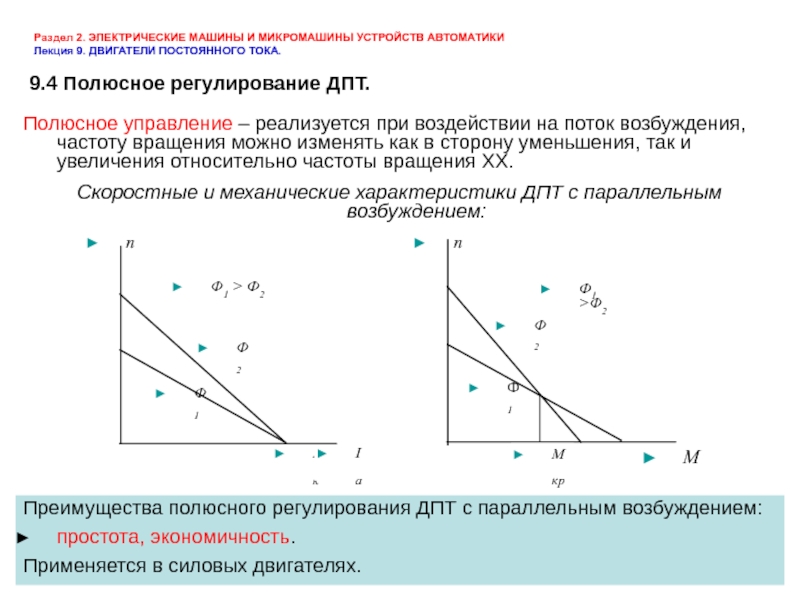 е. коэффициент возбуждения р. Напряжение ?/д изменяют с помощью пускового реостата, включенного последовательно с двигателями, и тиристорных преобразователей, а также применением различных схем соединений тяговых двигателей.
е. коэффициент возбуждения р. Напряжение ?/д изменяют с помощью пускового реостата, включенного последовательно с двигателями, и тиристорных преобразователей, а также применением различных схем соединений тяговых двигателей.
Реостатный пуск. В момент пуска и разгона электровоза или моторного вагона электропоезда для увеличения напряжения на зажимах двигателя и поддержания необходимых тока и силы тяги выводят ступенями пусковой реостат, т. е. осуществляют реостатный пуск. Для длительной езды под током применяют различные соединения тяговых двигателей и ступени ослабления возбуждения. Скоростные характеристики v(I), соответствующие различным схемам соединения двигателей при выведенном пусковом реостате и коэффициентам возбуждения, называют экономическими (ходовыми)’, характеристики, соответствующие работе на различных ступенях реостатного пуска, — реостатными.
В период пуска и разгона поезда якоря тяговых двигателей должны развивать частоту вращения от нуля до значения, соответствующего выходу на без-реостатную характеристику.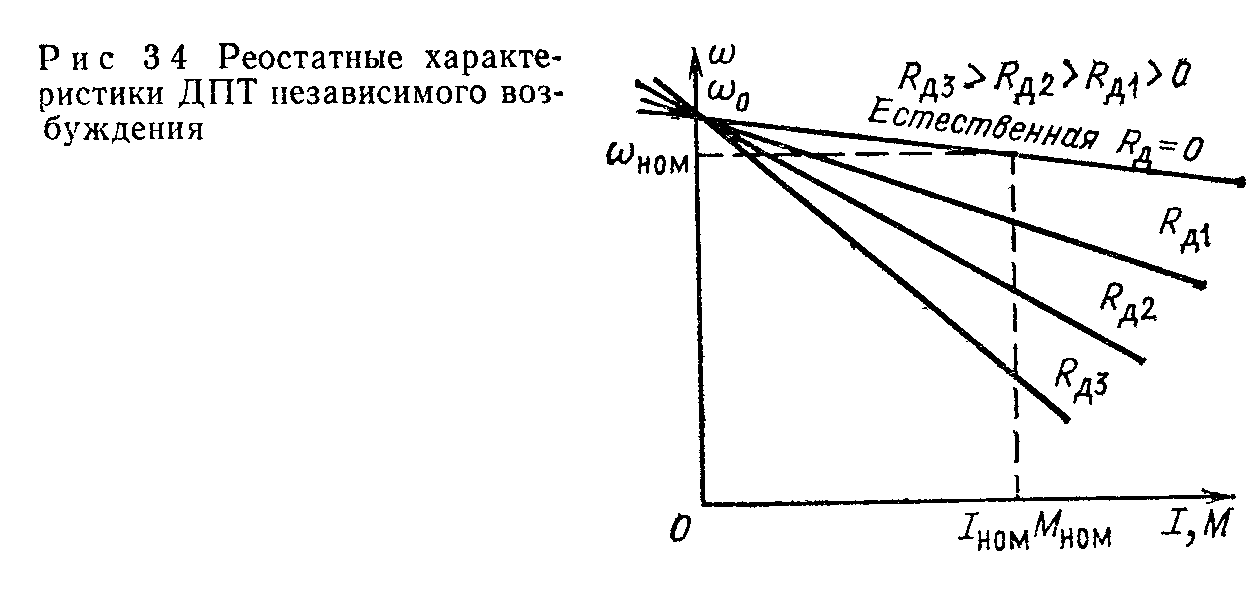 На электровозах, где пусковой режим машинист изменяет в широкик пределах сообразно с весом поезда, профилем пути и условиями сцепления, чаше всего применяют неавтоматический ступенчатый реостатный пуск. Плавное изменение сопро тивления пускового реостата, рассчитанного на большой ток, принципиально возможно при импульсном регулировании его тиристорным преобразователем.
На электровозах, где пусковой режим машинист изменяет в широкик пределах сообразно с весом поезда, профилем пути и условиями сцепления, чаше всего применяют неавтоматический ступенчатый реостатный пуск. Плавное изменение сопро тивления пускового реостата, рассчитанного на большой ток, принципиально возможно при импульсном регулировании его тиристорным преобразователем.
В процессе пуска почти всегда реализуется максимальная по сцеплению сила тяги. Отклонение пускового тока /п и силы тяги от средних значений при ступенчатом реостатном пуске характеризуют соответственно коэффициентами неравномерности пуска по току и силе тяги кн/ и киР.
Чтобы пуск электровоза или электропоезда происходил без боксования, для любой позиции должно быть соблюдено условие Ктах/П < фк (здесь Ктах — максимальная сила тяги по условиям сцепления движущего колеса с рельсом; П — нагрузка на рельсы от колесной пары; фк — расчетный коэффициент сцепления, который выбирают согласно Правилам тяговых расчетов.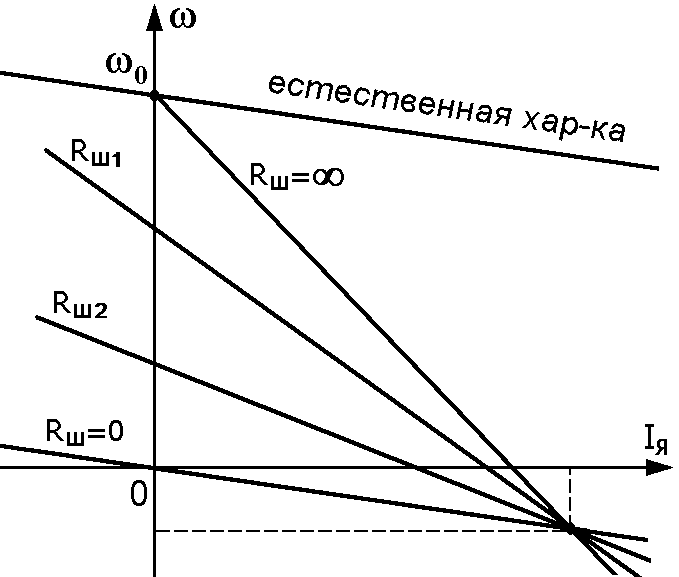 ч (здесь Кпэ = 1,4 -г— 1,6 коэффициент эксплуатационной перегрузки для электровозов с неавтоматическим пуском).
ч (здесь Кпэ = 1,4 -г— 1,6 коэффициент эксплуатационной перегрузки для электровозов с неавтоматическим пуском).
С уменьшением числа ступеней упрощается аппаратура, но вместе с тем увеличиваются колебания тока при переходе с позиции на позицию, а это приводит к уменьшению использования сцепного веса при пуске и торможении и резким толчкам тягового усилия. Поэтому в каждом конкретном случае стремятся принять решение, удовлетворяющее в необходимой степени обоим требованиям. Каждому соединению двигателей соответствует несколько кривых, характеризующих зависимость скорости движения и от тока I при различных сопротивлениях г. Совокупность таких кривых с указанием перехода с одной кривой (характеристики) на другую при максимальном токе называют пусковой диаграммой.
Для ограничения начального ускорения во время пуска электровоза с низкими скоростями при маневрах, а также для плавного натяжения упряжных приборов при трогании локомотива с составом на первом соединении тяговых двигателей, кроме позиций, полученных из условий пуска с расчетными пределами тока, вводят еще маневровые позиции, при которых пусковое сопротивление больше сопротивления, соответствующего первой пусковой позиции. Число маневровых позиций для электровозов обычно выбирают от четырех до шести.
Число маневровых позиций для электровозов обычно выбирают от четырех до шести.
Первую маневровую позицию рассчитывают по начальному ускорению, равному 0,3-0,5 м/с2 при пуске электровоза без состава на площадке. Для электропоездов с ускорением 0,7-1,0 м/с2 при автоматическом пуске обычно предусматривают одну маневровую позицию, сопротивление которой рассчитывают исходя из начального ускорения 0,5-0,6 м/с2 при о = 0.
При малом пусковом токе переход на первую позицию второго соединения тяговых двигателей может сопровождаться значительным броском тока, для уменьшения которого на втором и последующих соединениях двигателей при ручном пуске добавляют две или три дополнительные реостатные позиции на электро возах и одну или две на моторных вагонах аналогично маневровым позициям на первом соединении
Для определения дополнительных ступеней, предшествующих первой позиции второго соединения двигателей, находят скорость, при которой бросок тока при переходе с предыдущей автоматической характеристики на первую реостатную следующего соединения был бы равен разности максимального и минимального пусковых токов.
⇐Классификация цепей и требования, предъявляемые к электрическим схемам | Электровозы и электропоезда | Регулирование частоты вращения якорей тяговых двигателей постоянного тока⇒
ШИМ регулятор скорости двигателя постоянного тока
Регулировать скорость вращения небольших двигателей постоянного тока очень удобно посредством широтно-импульсной модуляции — ШИМ или PWM (pulse-width modulation). Предлагаемая схема управления очень проста и собрана всего на одном распространенном и дешевом чипе LM324. Эта микросхема содержит четыре одинаковых операционных усилителя в одном корпусе. Для реализации схемы ШИМ в общем случае необходим генератор напряжения треугольной формы и компаратор. два из четырех ОУ микросхемы LM324 работают в генераторе, третий ОУ включен как компаратор. Четвёртый ОУ не используется. Никто не мешает вам использовать в этой схеме три одиночных операционных усилителя общего применения, например TL071 или один сдвоенный и один одинарный ОУ, к примеру, TL072 + TL071.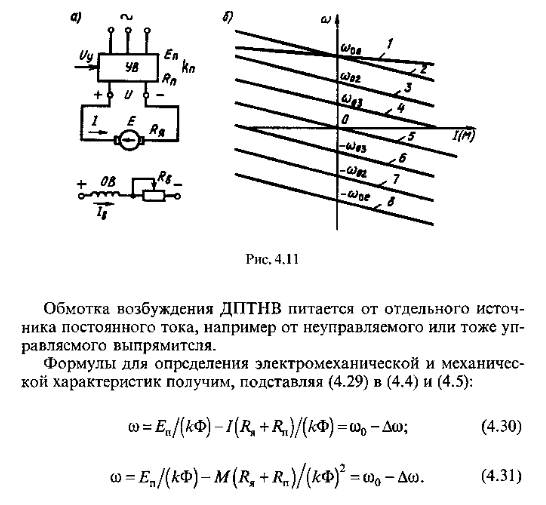 В этом случае размер устройства, конечно, будет больше, чем в случае использования одно счетверенного ОУ.
В этом случае размер устройства, конечно, будет больше, чем в случае использования одно счетверенного ОУ.
Генератор напряжения треугольной формы собран на ОУ N1 и N2 по известной схеме «интегратор-компаратор». На выходе компаратора на N2 (14) формируются прямоугольные импульсы частотой около 1.6 кГц, которые по цепи обратной связи подаются на инвертирующий вход (2) интегратора, собранного на ОУ N1 через резистор R1. С выхода интегратора (1) снимается сигнал треугольной формы с той же частотой 1.6 кГц. Треугольная волна поступает на неинвертирующий вход (5) компаратора, реализованного на ОУ N3. Одновременно на инвертирующий вход N3 поступает образцовое напряжение с движка потенциометра VR1, который входит в делитель напряжения R4, R5, VR1. При указанных номиналах делителя напряжения и напряжении питания ∓12В, образцовое напряжение может принимать значения от -6 до +6 вольт, в зависимости от угла поворота оси потенциометра VR1. Компаратор N3 сравнивает треугольный сигнал на выводе 5 N3 с образцовым напряжением на выводе 6. если напряжение на выводе 5 больше напряжения на выводе 6, то на выходе N3 (7) появится высокий уровень напряжения около +12В. Когда напряжение на выводе 5 N3 станет меньше образцового на выводе 6, на выходе 7 N3 появится низкий уровень около -12В. Таким образом, при поступлении на вход 5 напряжения треугольной формы на выходе 7 будут формироваться прямоугольные импульсы с длительностью, зависящей от образцового напряжения на выводе 6 N3. Иными словами, мы сможем регулировать скважность прямоугольного сигнала на выходе N3, поворачивая движок потенциометра VR1.
если напряжение на выводе 5 больше напряжения на выводе 6, то на выходе N3 (7) появится высокий уровень напряжения около +12В. Когда напряжение на выводе 5 N3 станет меньше образцового на выводе 6, на выходе 7 N3 появится низкий уровень около -12В. Таким образом, при поступлении на вход 5 напряжения треугольной формы на выходе 7 будут формироваться прямоугольные импульсы с длительностью, зависящей от образцового напряжения на выводе 6 N3. Иными словами, мы сможем регулировать скважность прямоугольного сигнала на выходе N3, поворачивая движок потенциометра VR1.
Наглядно процесс показан на графике ниже. Зеленая линия — это образцовое напряжение. Прямоугольный сигнал синего цвета — это выходной сигнал компаратора.
ШИМ сигнал с выхода N3 подается га затвор MOSFET транзистора Т1. двигатель постоянного тока включен в цепь стока этого транзистора. Во время действия высокого уровня напряжения полевой транзистор открывается и подключает двигатель к источнику питания.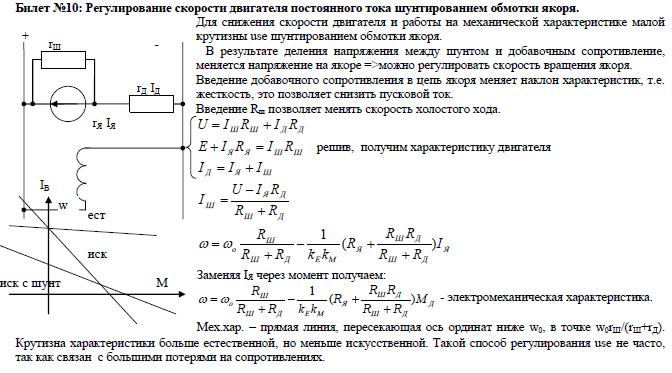 Во время действия напряжения низкого уровня транзистор закрыт и мотор обесточен. Поскольку это происходит со сравнительно высокой частотой, средний ток, протекающий через мотор зависит от скважности (длительности) прямоугольных импульсов. поступающих на затвор транзистора. Чем больше длительность импульса, тем больше будет средний ток, проходящий через двигатель и наоборот. таким образом происходит регулировка частоты вращения мотора.
Во время действия напряжения низкого уровня транзистор закрыт и мотор обесточен. Поскольку это происходит со сравнительно высокой частотой, средний ток, протекающий через мотор зависит от скважности (длительности) прямоугольных импульсов. поступающих на затвор транзистора. Чем больше длительность импульса, тем больше будет средний ток, проходящий через двигатель и наоборот. таким образом происходит регулировка частоты вращения мотора.
Для работы схемы требуется двухполярный источник питания напряжением ∓12В. Схема может быть модифицированна для использования с двигателями постоянного тока, рассчитанными на напряжение от 6 до 24 вольт.
CCMHC DC 12 В 24 в 36 в 10 А контроль скорости двигателя постоянного тока бесступенчатое регулирование скорости ШИМ контроллер двигателя
Описание и отзывы
Характеристики
Cccmhc DC 12V 24V 36V 10A двигатель постоянного тока регулятор скорости бесступенчатое регулирование скорости pwm контроллер двигателя
Примечание:
1. У нас естьВсе видыПостоянного токаСкорость вращения двигателя• Питание:0-100V Макс 100A max
У нас естьВсе видыПостоянного токаСкорость вращения двигателя• Питание:0-100V Макс 100A max
2.У нас также естьПеременного токаСкорость вращения двигателя• Питание:Макс 60A
3.Мы принимаем к оплате денежныеПо индивидуальному заказу и образцы.
Спецификация:
Регулятор скорости вращения двигателя постоянного тока позволяет контролировать скорость двигателя постоянного тока при использованииИмпульсной ширины-modulated (ШИМ)Напряжение постоянного тока с длительным сроком службы полностью регулируется от 0%-100%. Мотор регулятор скорости могут послужитьПостоянный ток 10A для того, чтобы ваш двигатель постоянного тока или других нагрузочный модуль постоянного тока load.
Схема также включает в себя 20A предохранитель, защита от обратного подключения питанияПоставка и контролем напряжения, функция защиты от напряжения.
Основные технические параметры:
Входное напряжение питающей сети:12V-40VDC
Максимальная выходная мощность:0,01-400W
Максимальный непрерывный выходной ток:8A;
От перегрузки и защита от короткого замыкания защита ток10A
PWM частота:13 кГц
Регулируемый Рабочий цикл:10%-100%
В 20A предохранитель с Защита от обратного подключения питания и управления
Стабилизатор напряжения Защита от избыточного напряжения Функция
Можно регулировать скорость внешнего 0-5V сигнала
Технические характеристики:
Размер изделия: 60*55*28 мм
Двумя монтажными отверстиями 3,2 мм
Вес нетто: 66 г
Важные Примечания
Надлежащим образом Номинальная предохранитель (номинальная немного выше, чем максимальный ток вы ожидаете, чтобы рисовать)
Рекомендуется для того, чтобы обеспечить безопасную работу.
Контроллер с обратным-защита от обратной полярности и предохранитель будет поврежден при подключении в
Напряжение питания с неправильной полярности. Еще раз проверьте, правильно ли все соединительные детали должны быть перед подачей питания и всегда
Выключите питание перед тем, как сделать каких-либо проводов.
Другой вариант для вас на выбор
Пакет
1 * Двигатель постоянного тока регулятор скорости контроля
Наши услуги
Почему стоит выбрать нас:
1. Быстрая доставкаБольшинство товаров в наличии на складеМы находимся вШэньчжэнь, Вы можете получить посылку быстрее, чем другие города.
2. Мы можем сделать вамЛучшая ценаДля большинства продуктов.
3. У нас естьМножество различных продуктов, Таким образом, вы покупаете его вместе, не нужно выбирать более Сделано в Китае.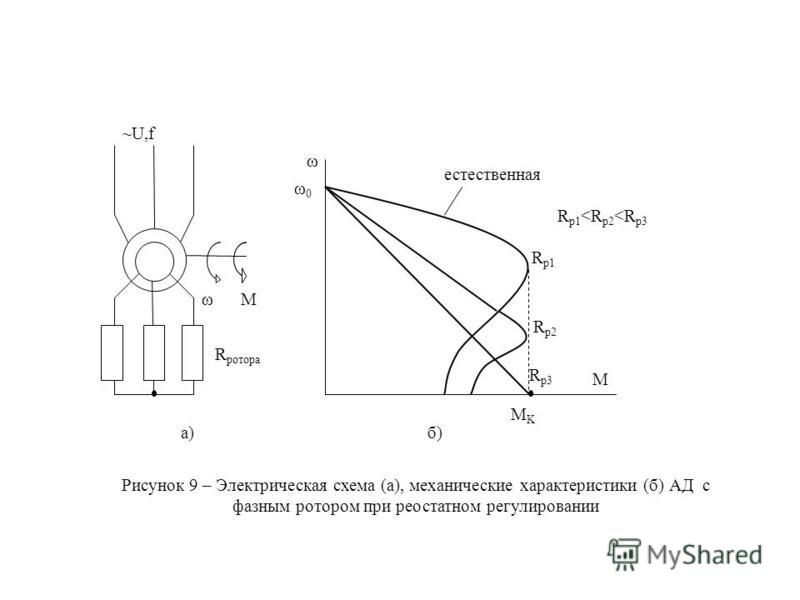
4. Наш сотрудник оченьПрофессиональный,Таким образом, мы можем предложитьСамое лучшее обслуживание и быстрый ответ.
Вопросы и ответыНаши основные продукты:Цифровой вольтметр/амперметр/тестер батарейной емкости/температура контроллер измеритель влажности
Конвертер постоянного/переменного тока/триггерный релейный модуль/усилитель/контроллер двигателя
Оплата: Мы принимаем денежные переводы черезPaypal денежные переводы через Western union предоплата юанейОплата
Доставка: Пожалуйста, обратите внимание: Мы отправим посылку как можно скорее, это нормально, 3-7days, то мы можем отправить товар по DHL, Fedex, UPS, EMS, DHL, TNT, Fedex, DPEX
EMS ….
Похожие товары
Регулятор скорости двигателя, постоянный ток 1,8-15 в, 5 В, 12 В, 30 Вт, 2 А, ШИМ, регулятор, переключатель управления скоростью вентилятора низкого напряжения, ШИМ регулируемый привод
Kelly, от 12 до 96 в, 100A-400A, KBL, универсальный контроллер двигателя BLDC с сигналами
Okystar OEM/ODM контроллер скорости двигателя постоянного тока L293D драйвер двигателя для Arduino
Бесщеточный контроллер двигателя постоянного тока 60-120 в 80 а 3000 Вт для электрического велосипеда
Хорошая цена электромагнитного моторный накопитель переменного тока регулятор частоты вращения JD1A-40 JD1A-90 регулятор
Контроллер постоянного тока для электромобиля, 1000 Вт, 48 В, 60 В, 72 в, 40 А, бесщеточный контроллер двигателя постоянного тока
Цифровой дисплей Taidacent, постоянный ток 10-55 В, 60 А, Реверсивный двигатель постоянного тока, высокоскоростной ШИМ IC 50 А, контроллер скорости ШИМ
Bringsmart BS-51 220V AC контроллер скорости двигателя, Реверсивный и регулятор скорости, миниатюрное регулирование скорости двигателя переменного тока для электродвигателя
Управление скоростью двигателя постоянного тока с помощью ручных и автоматических устройств
N = K (V — IaRa) / ø Где K — постоянная величина.
Это подразумевает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Скорость двигателя обратно пропорциональна падению напряжения якоря.
- Скорость двигателя обратно пропорциональна магнитному потоку из-за полевых выводов
Таким образом, скорость двигателя постоянного тока можно регулировать тремя способами:
- Путем изменения магнитного потока и тока через обмотку возбуждения
- Путем изменения напряжения якоря и сопротивления якоря
- Через напряжение питания
1.Метод контроля потока
Из-за обмотки возбуждения магнитный поток изменяется для изменения скорости двигателя. Поскольку магнитный поток зависит от тока, протекающего через обмотку возбуждения, он изменяется путем изменения тока через обмотку возбуждения. Этого можно добиться, используя переменный резистор последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор находится в минимальном положении, номинальный ток течет через обмотку возбуждения из-за номинального напряжения питания, и в результате скорость остается нормальной.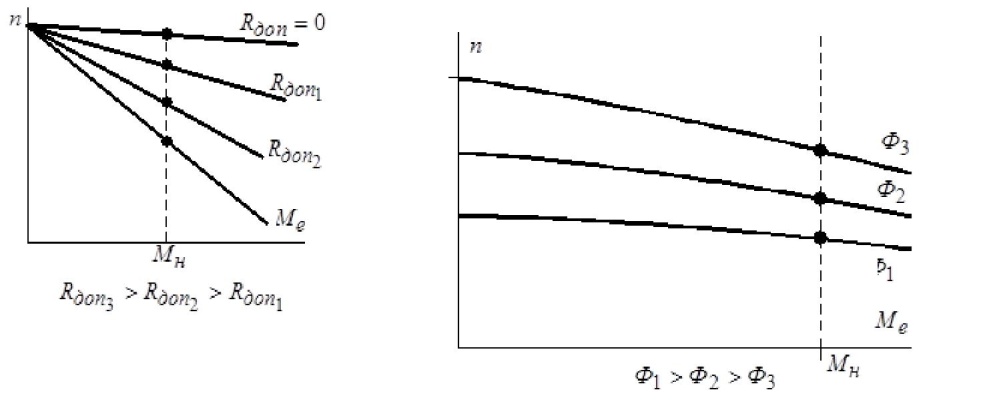 Когда сопротивление постепенно увеличивается, ток через обмотку возбуждения уменьшается. Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
Когда сопротивление постепенно увеличивается, ток через обмотку возбуждения уменьшается. Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
2. Метод управления якорем
Управление сопротивлением якоря контролирует падение напряжения на якоре. С помощью этого метода можно контролировать скорость двигателя постоянного тока. В этом методе также используется переменный резистор, включенный последовательно с якорем.
Когда переменный резистор достигает минимального значения, сопротивление якоря становится нормальным.Следовательно, напряжение якоря падает. Когда значение сопротивления постепенно увеличивается, напряжение на якоре уменьшается. Это, в свою очередь, приводит к снижению скорости двигателя. Таким образом, этот метод обеспечивает скорость двигателя ниже его нормального диапазона.
3. Метод контроля напряжения
Оба вышеупомянутых метода не могут обеспечить регулирование скорости в желаемом диапазоне.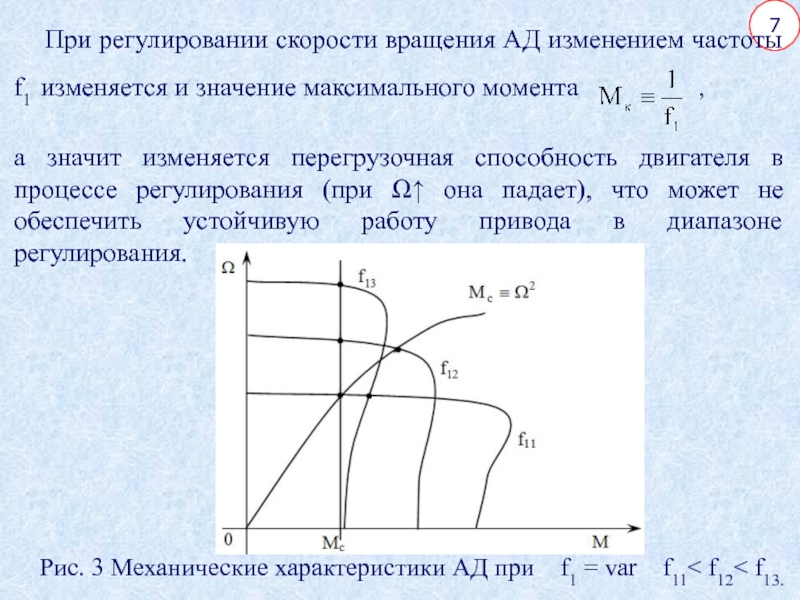 Более того, способ управления потоком может повлиять на коммутацию. В то время как метод управления якорем включает в себя огромные потери мощности из-за использования резистора, включенного последовательно с якорем.Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Более того, способ управления потоком может повлиять на коммутацию. В то время как метод управления якорем включает в себя огромные потери мощности из-за использования резистора, включенного последовательно с якорем.Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
При таком способе обмотка возбуждения получает фиксированное напряжение, а якорь — переменное напряжение. Один из таких способов управления напряжением включает использование переключающего механизма для подачи переменного напряжения на якорь. Другой использует генератор с приводом от двигателя переменного тока для подачи переменного напряжения на якорь (названный системой Ward-Leonard).
Помимо этих двух методов, наиболее широко используемым методом является использование широтно-импульсной модуляции для управления скоростью двигателя постоянного тока.ШИМ включает приложение импульсов различной ширины к драйверу двигателя для управления напряжением, подаваемым на двигатель.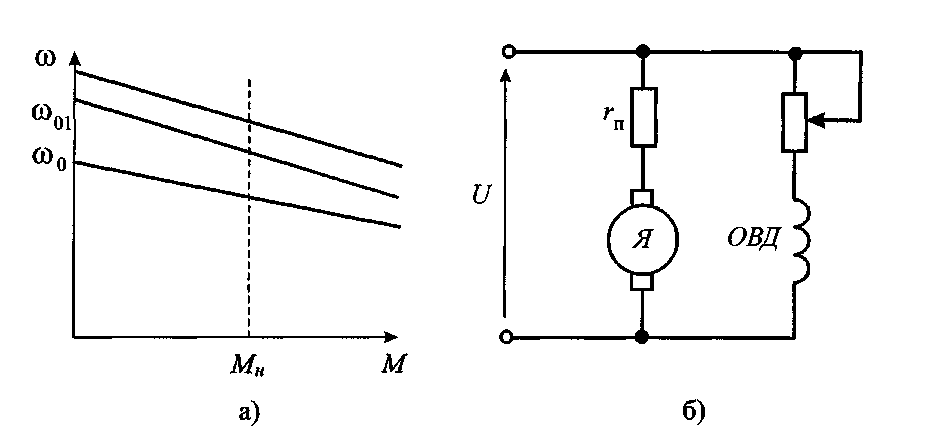 Этот метод оказался очень эффективным, поскольку потери мощности сведены к минимуму, и он не требует использования какого-либо сложного оборудования.
Этот метод оказался очень эффективным, поскольку потери мощности сведены к минимуму, и он не требует использования какого-либо сложного оборудования.
ШИМ достигается путем изменения импульсов, подаваемых на разрешающий вывод микросхемы драйвера двигателя, для управления приложенным напряжением двигателя. Изменение импульсов осуществляется микроконтроллером с входным сигналом от кнопок.
Мы надеемся, что мы рассмотрели все подробности и соответствующее описание по управлению скоростью двигателя постоянного тока.
Мы в Robu.in надеемся, что вам было интересно, и что вы вернетесь к другим нашим образовательным блогам.
Органы управления двигателями постоянного тока — Системы контроллеров двигателей, приводы и силовая продукция
American Control Electronics предлагает широкий выбор устройств управления двигателями постоянного тока, которые превосходят отраслевые стандарты. Контроллер двигателя постоянного тока управляет положением, скоростью или крутящим моментом двигателя постоянного тока и легко меняет направление, поэтому постоянный ток течет в противоположном направлении. Наслаждайтесь более высоким пусковым моментом, быстрым запуском и остановкой, реверсированием, регулируемой скоростью с входным напряжением и многим другим. Выберите тип технологии, входное напряжение, выходное напряжение, постоянный ток, корпус, тип торможения, реверсивный тип и изоляцию.
Наслаждайтесь более высоким пусковым моментом, быстрым запуском и остановкой, реверсированием, регулируемой скоростью с входным напряжением и многим другим. Выберите тип технологии, входное напряжение, выходное напряжение, постоянный ток, корпус, тип торможения, реверсивный тип и изоляцию.
Управление скоростью двигателя постоянного тока, пожалуй, наиболее распространенная манипуляция, используемая в контроллерах постоянного тока. Этой скоростью можно управлять четырьмя различными способами: изменением магнитного потока, изменением напряжения якоря, изменением напряжения питания и широтно-импульсной модуляцией (ШИМ).ШИМ — это метод, обычно используемый для управления скоростью в двигателе постоянного тока. Он передает энергию посредством серии импульсов, а не непрерывного сигнала. Изменяя ширину импульса, контроллер двигателя постоянного тока может регулировать поток энергии, чтобы поддерживать его постоянство.
Хотя управление крутящим моментом двигателя постоянного тока менее популярно, оно достигается с помощью привода постоянного тока, регулирующего ток якоря. Поскольку ток якоря не регулируется, двигатель может работать с любой скоростью, необходимой для достижения желаемого уровня крутящего момента.Уровень крутящего момента может оставаться постоянным, достигая «эффекта конусного натяжения» для фиксированного входного задания и центрального намотчика в режиме крутящего момента. Однако оператор станка может в некоторых случаях увеличивать уставку крутящего момента по мере увеличения диаметра.
Поскольку ток якоря не регулируется, двигатель может работать с любой скоростью, необходимой для достижения желаемого уровня крутящего момента.Уровень крутящего момента может оставаться постоянным, достигая «эффекта конусного натяжения» для фиксированного входного задания и центрального намотчика в режиме крутящего момента. Однако оператор станка может в некоторых случаях увеличивать уставку крутящего момента по мере увеличения диаметра.
American Control Electronics предлагает множество средств управления двигателями постоянного тока, которые включают различные режимы работы как по отдельности, так и вместе. Это просто зависит от области применения и потребностей ваших систем управления двигателем. Однако из-за такого разнообразия может быть сложно найти контроллер двигателя постоянного тока, который подходит для вашей формы.Убедитесь, что вы знаете диапазоны напряжения и типы управления, необходимые для правильной работы вашей системы управления.
Посмотрите наш выбор управления двигателем постоянного тока ниже.
AB-026: Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Стабилизатор скорости без датчика для двигателя постоянного тока
Введение
Скорость двигателя — это параметр двигателя постоянного тока, который часто измеряется и регулируется, обычно с помощью дополнительных датчиков и с обратной связью по замкнутому контуру.Для этого метода управления скоростью требуется датчик скорости определенного типа, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторов имеют задние валы специально для этой цели, например, 212-109.
Система управления с обратной связью для скорости двигателя постоянного токаЭта блок-схема представляет собой типичную систему управления с обратной связью, которая может быть разработана для работы в аналоговом или цифровом режиме.
Оптические датчики-го обычно используются с цифровыми контроллерами, в то время как аналоговые схемы часто используют тахогенераторы. С помощью ШИМ-управления можно достичь хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
С помощью ШИМ-управления можно достичь хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
Для щеточных двигателей постоянного тока можно измерять и регулировать скорость без каких-либо датчиков на двигателе, используя основную характеристику — напряжение обратной ЭДС, зависящее от скорости.
Бессенсорное аналоговое измерение скорости двигателя
Двигатель постоянного тока моделируется как последовательное соединение внутреннего сопротивления и источника напряжения обратной ЭДС.Напряжение на клеммах двигателя складывается из обратной ЭДС и падения напряжения на сопротивление катушки.
Связаться
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные и экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Падение напряжения на внутреннем сопротивлении якоря зависит от тока двигателя (и, следовательно, от момента нагрузки).Невозможно измерить скорость напрямую, измеряя только напряжение на клеммах двигателя.
Сопротивление обмотки Ra обычно постоянно — хотя оно имеет небольшую температурную зависимость, мы можем компенсировать его, чтобы падение напряжения на якоре двигателя было пропорционально току двигателя.
Поскольку измерить обратную ЭДС напрямую невозможно, нам необходимо рассчитать ее по следующему уравнению: 𝑉𝑚𝑜𝑡𝑜𝑟 = 𝑉𝑏𝑒𝑚𝑓 + (𝐼𝑎 × 𝑅𝑎)
К сожалению, напрямую измерить напряжение якоря также невозможно — однако мы можем подключить дополнительный (внешний) резистор последовательно с двигателем.Измерение падения напряжения на этом последовательном резисторе позволяет нам определить обратную ЭДС.
Эквивалентная схема щеточного двигателя постоянного тока с последовательным резисторомЕсли мы установим значение последовательного резистора равным сопротивлению в двигателе, мы гарантируем, что любое изменение падения напряжения на последовательном резисторе будет равно падению напряжения в якоре: 𝑉𝑎 = 𝐼𝑎 × 𝑅𝑎𝑉𝑠 = 𝐼𝑎 × 𝑅𝑠𝑅𝑠 = 𝑅𝑎𝑉𝑠 = 𝑉𝑎
Итак, сначала нам нужно узнать или измерить сопротивление якоря двигателя. Это можно сделать путем измерения сопротивления на клеммах двигателя с помощью омметра или путем измерения тока остановки с известным напряжением питания.При использовании последнего предпочтительнее использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Это можно сделать путем измерения сопротивления на клеммах двигателя с помощью омметра или путем измерения тока остановки с известным напряжением питания.При использовании последнего предпочтительнее использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Например, при питании двигателя 1,2 В и измерении 100 мА во время остановки сопротивление якоря рассчитывается как: = 𝐼𝑠𝑡𝑎𝑙𝑙 × 𝑅𝑎𝑅𝑎 = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦𝐼𝑠𝑡𝑎𝑙𝑙𝑅𝑎 = 1,2𝑉100𝑚𝐴𝑅𝑎 = 12 Ом
При использовании омметра для измерения оконечного сопротивления снимите среднее значение нескольких показаний при разных положениях ротора.
Напряжение питания будет равно напряжению последовательного резистора, напряжению сопротивления якоря и напряжению обратной ЭДС.𝑉𝑠𝑢𝑝𝑝𝑙𝑦 = 𝑉𝑠 + 𝑉𝑎 + 𝑉𝑏𝑒𝑚𝑓
Напряжение обратной ЭДС можно рассчитать, вычтя удвоенное падение напряжения на последовательном резисторе из напряжения питания. = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦– (2 × 𝑉𝑠)
Чтобы уменьшить потери мощности, мы можем использовать более низкое последовательное сопротивление, но резистор в конечном итоге снизит напряжение, воспринимаемое двигателем. Используя мостовую схему, можно сохранить высокую чувствительность измерения и компенсировать потери мощности в двигателе:
Мостовая схема для измерения напряжения обратной ЭДСПравая опора моста состоит из последовательно включенных электродвигателя M и резистора Rs .Левая ножка представляет собой последовательное соединение резисторов R1 и R2 , каждая ножка подключена к источнику питания. Напряжение обратной ЭДС измеряется между точками A и B .
Rload представляет входное сопротивление нашей измерительной цепи. Поскольку он будет состоять из операционного усилителя, его входное сопротивление будет намного больше, чем другие сопротивления в этой схеме (идеальные операционные усилители имеют бесконечное входное сопротивление).
Нам необходимо убедиться, что напряжение между точками A и B не зависит от тока двигателя и напряжения питания и зависит только от скорости двигателя и входного сопротивления измерительной цепи ( Rload ).
Начнем с анализа схемы без обратной ЭДС, то есть когда двигатель остановлен. Для балансировки моста напряжение между точками A и B должно быть нулевым. Это происходит до тех пор, пока соотношение между R1 и R2 такое же, как Rs и Ra : 𝑅2𝑅1 = 𝑅𝑎𝑅𝑠
ч — коэффициент усиления нашего моста: ℎ = 𝑅1𝑅2 = 𝑅𝑠𝑅𝑎
Если мы выведем двигатель из состояния остановки, напряжение обратной ЭДС пропорционально скорости: 𝑉𝑏𝑒𝑚𝑓 = 𝑘𝑒 × 𝑛
, где кэ, — электрическая постоянная нашего двигателя, а n — скорость двигателя.
Если двигателю разрешено вращаться со скоростью холостого хода, для идеального двигателя мы ожидаем, что Ia равно 0. Это потому, что идеальные двигатели игнорируют сопротивление воздуха и трение подшипников. Напряжение на скорости холостого хода: 𝑉𝑟𝑝𝑚𝑁𝐿 = 𝑘𝑒 × 𝑛𝑁𝐿
Отсюда Vbemf может быть подписано как: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝑛𝑛𝑁𝐿 = 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾
Где K — коэффициент пропорциональности между Vbemf и V_rpm в нашей схеме.
Теперь мы можем составить систему уравнений для нашей схемы:
Текущие уравненияРешение для I5 : 𝐼5 = ℎ (ℎ + 1) 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎 + 𝑅2) + (ℎ + 1) 2 × 𝑅𝑙𝑜𝑎𝑑
Таким образом, выходное напряжение равно: 𝑉𝑟𝑝𝑚 = 𝐼5 × 𝑅𝑙𝑜𝑎𝑑 = ℎ (ℎ + 1) × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎 + 𝑅2) + (ℎ + 1) 2 × 𝑅𝑙𝑜𝑎𝑑 × 𝑅𝑙𝑜𝑎𝑑
А для работы без нагрузки: 𝑉𝑟𝑝𝑚 = ℎℎ + 1 × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾
Выходное напряжение между точками A и B не зависит от источника питания и тока двигателя, как без нагрузки, так и при работе под нагрузкой.Это зависит от х , и при увеличении выходное напряжение также увеличивается.
Как упоминалось ранее, сопротивление якоря будет изменяться в зависимости от температуры, что приводит к разбалансировке моста и влиянию на выход В об / мин . Чтобы свести к минимуму этот эффект, мост следует настраивать, когда двигатель находится при рабочей температуре.
Этот метод стабилизации скорости был популярным решением для контроллеров скорости вращения ротора регулятора, используемых в магнитофонах, использующих аналоговую электронику.В эпоху магнитофонов многие компании производили микросхемы для управления двигателем постоянного тока, чтобы лента двигалась с постоянной скоростью. Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Общие ИС включают LA5586, TDA7274, BA6220 и AN6550. К сожалению, производство большинства из них было снято с производства, и теперь их можно приобрести только на вторичном рынке. Схемы в микросхемах немного отличались, но принцип работы по-прежнему основан на мостовой схеме, описанной выше.
LA5586 Эквивалентная схема регулятора скорости двигателя и прикладная схемаОбратите внимание, что эквивалентная схема нарисована с источниками тока и постоянным коэффициентом тока. Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной ИС, и обозначается как K . В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Двигатель подключен к одной ветви моста, а вторая ветвь содержит резистор со значением K, в раз превышающим внутреннее сопротивление двигателя.
Цепь установившегося состояния для контроллера мотораВ установившемся режиме ток двигателя в K в раза больше, чем ток через Rt . Отрицательный вход операционного усилителя подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже, чем напряжение двигателя. Разница составит Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Без Rs , ток через Rt в 40 раз меньше тока двигателя. Когда нагрузка двигателя увеличивается, напряжение в точке B увеличивается, а также увеличивается выходное напряжение усилителя. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя. Регулировка скорости может быть достигнута путем добавления шунтирующего резистора — напряжение между точками A и B всегда равно опорному напряжению, поэтому легко контролировать дополнительный ток, добавленный к Rt .
Эта схема будет сбалансирована, когда напряжение двигателя равно сумме напряжений на Rt и Rs ( Vref ). Уравнение установившегося состояния: 𝐼𝑚 × 𝑅𝑚 + 𝑉𝑏𝑒𝑚𝑓 = 𝑅𝑇 × 𝐼𝑠 + 𝑅𝑇 × 𝐼𝑠 + 𝐼𝑚𝐾 + 𝑉𝑟𝑒𝑓
Отсюда уравнение для обратной ЭДС: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + (1 + 1𝐾) × 𝑅𝑇 × 𝐼𝑠 + 𝑅𝑇𝐾 – 𝑅𝑚 × 𝐼𝑚
Принятие: 𝐾 × 𝑅𝑚 = 𝑅𝑇
, то количество оборотов, определяемое Vbemf , составляет: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + 𝑅𝑇 × (1 + 1𝐾) × 𝐼𝑠
Важно, чтобы во всех случаях Rt было меньше, чем K x Rm , иначе цепь будет чрезмерно компенсированной и нестабильной.
Аналоговый регулятор скорости с отрицательным сопротивлением
Увеличение нагрузки на двигатель приводит к увеличению потребляемого тока и падению скорости. Обратная ЭДС и напряжение на двигателе также снижаются, этот метод управления известен как регулятор отрицательной клеммы.
В этом случае мы используем операционный усилитель для управления скоростью, поэтому наша R_load будет на тысячи больше, чем другое сопротивление в этой цепи, и снова может быть опущена.
Из предыдущего раздела мы знаем, что напряжение источника питания не изменилось В об / мин , что позволяет нам запитать нашу схему от мощного операционного усилителя или добавить транзистор к выходу стандартного операционного усилителя. .Подключив инвертирующий вход к ножке моста между двигателем и последовательным резистором, мы можем управлять источником питания моста с помощью напряжения, подключенного к неинвертирующему выходу.
Цепь управления напряжением двигателяВходное напряжение подается на неинвертирующий вход операционного усилителя, а инвертирующий вход подключается непосредственно к клемме двигателя. Мы пока не можем контролировать скорость с помощью схемы, в связи с чем наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1.По сути, входное напряжение определяет напряжение двигателя.
Можно изменить скорость двигателя, задав напряжение Vin, но это не поддерживает постоянную скорость при изменении нагрузки. При постоянном входном напряжении двигатель будет вращаться быстрее при малых нагрузках и медленнее при увеличении нагрузки. Нам нужно еще несколько компонентов для стабилизации скорости двигателя.
Падение напряжения на рупий пропорционально падению напряжения на сопротивлении якоря двигателя, мы будем использовать это напряжение для компенсации падения напряжения на сопротивлении якоря.Это можно сделать, добавив модификацию схемы к приведенной ниже — добавив R1 и R2 и подключив их среднюю точку к неинвертирующему входу операционного усилителя.
Цепь регулятора скорости двигателяСоотношение R1 и R2 должно быть таким же, как Rs и Ra , чтобы обеспечить стабилизацию скорости. На изображении выше показана полная схема и ее эквивалент для руководства, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС при желаемой скорости.
Коэффициент компенсации определяется значением Rs , но удобнее использовать стандартное значение сопротивления, а затем изменить R1 или R2 соответственно.
Если скорость двигателя уменьшается при приложении нагрузки, следует увеличить значение R2 (или уменьшить R1 ). Если скорость двигателя начинает колебаться (или имеет тенденцию к увеличению) при приложении нагрузки, следует уменьшить R2 или ( R1 следует увеличить).
Чтобы спроектировать эту схему, нам нужно знать, какое значение обратной ЭДС на желаемой скорости:
- Чтобы найти напряжение обратной ЭДС на желаемой скорости, вал двигателя может быть установлен на бурильщик и приведен в движение. После достижения желаемой скорости (проверенной тахометром) измерьте напряжение на клеммах двигателя с помощью высокоомного вольтметра.
- Измерьте внутреннее сопротивление обмотки с помощью омметра на клеммах двигателя. Рекомендуется взять среднее значение из нескольких различных измерений положения ротора.
- Выберите значение Rs из стандартных значений, оно может быть меньше сопротивления двигателя.
- Выберите R1 и R2 , чтобы соотношение было таким же, как соотношение между Rs и Ra . Фактические значения резистора должны быть больше Rs и Ra для экономии тока. Поскольку эквивалентное сопротивление плеч моста будет другим, операционный усилитель должен быть с низким входным током.
- Подайте управляющее напряжение, равное желаемой обратной ЭДС.
- Проверьте скорость и соответствующим образом компенсируйте (указано в абзаце перед этим списком).
Для температурной компенсации можно выбрать Rs с тем же температурным коэффициентом, что и обмотки двигателя — для меди это 3400 частей на миллион. Этот резистор следует размещать как можно ближе к двигателю, чтобы поддерживать тот же температурный режим.
Простая схема стабилизации скорости двигателя также может быть выполнена только на транзисторах:
Транзисторный регулятор скоростиВ этой схеме T2 работает как выходной каскад, а T1 как усилитель ошибки.Сигнал на коллекторе T1 является выходным сигналом, эмиттер работает как инвертирующий вход, а база как неинвертирующий вход.
Сигнал напряжения на двигателе подключен к неинвертирующему входу, потому что выходной каскад инвертирует этот сигнал, что означает, что больший сигнал на коллекторе вызывает меньший ток двигателя.
Диоды D1 и D2 создают опорное напряжение, напряжение на эмиттере T1 всегда ниже, чем напряжение на выводах двигателя.Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .
R7 и C2 — это схема запуска, помогающая преодолеть статическое трение, а C1 — конденсатор с частотной компенсацией, предотвращающий высокочастотные колебания.
Поскольку нам необходимо точное измерение обратной ЭДС, которое зависит от контактного сопротивления между коммутатором и щетками, лучше всего использовать двигатели с металлическими щетками.Большинство двигателей Precision Microdrive имеют металлические щетки и подходят для этого метода управления скоростью.
Регулятор скорости со специализированным IC
Эта схема основана на AN6651, специализированном контроллере двигателя, который ранее был популярен в магнитофонах.
AN6651 работает по тому же принципу, что и описанный выше LA5586. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾 = 40𝑅1 = 𝐾 × 𝑅𝑚
AN6651 работает по тому же принципу, что и описанный выше LA5586.Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾 = 40𝑅1 = 𝐾 × 𝑅𝑚
Например, используя стандартное значение 390 Ом для R1 (меньшее значение снижает склонность к возникновению колебаний), нам нужно найти значения для последовательного соединения R2 и R3.Давайте возьмем двигатель постоянного тока 132-100 и установим целевую скорость 2400 об / мин. Для начала нам нужны некоторые технические детали:
- Сопротивление двигателя, = 10 Ом
- Входное напряжение без нагрузки при скорости 2400 об / мин, 𝑉𝑚 = 3,87𝑉
- Ток без нагрузки при скорости 2400 об / мин, 𝐼𝑚 = 23𝑚𝐴
Падение напряжения можно рассчитать на внутреннее сопротивление как: 23𝑚𝐴 × 10Ω = 0,23𝑉
, и мы также можем рассчитать Vbemf как: 3,87𝑉 − 0,23𝑉 = 3,65𝑉
В установившемся режиме, когда цепь сбалансирована, уравнение цепи имеет следующий вид: × 𝑅𝑚 + 𝑉𝑏𝑒𝑚𝑓 = 𝑅1 × (𝐼𝑅2𝑅3 + 𝐼𝑅2𝑅3 + 𝐼𝑚𝐾 + 𝑉𝑟𝑒𝑓
Из этого уравнения мы можем вычислить обратную ЭДС: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + 𝑅1 × (1 + 140) × 2𝑅3
Как мы знаем из даташита Vref = 1V, поэтому: 𝐼𝑅2𝑅3 = 𝑉𝑏𝑒𝑚𝑓 – 𝑉𝑟𝑒𝑓𝑅1 × (1 + 140)
Для нашего мотора имеем: 2𝑅3 = 3.64–1390 × (1 + 140) 𝐼𝑅2𝑅3 = 0,0051𝐴 = 5,1𝑚𝐴
С помощью этого значения можно рассчитать последовательное сопротивление R2 и R3 : 𝐼𝑅2𝑅3 = 𝑉𝑟𝑒𝑓𝑅2 + 𝑅3𝑅2 + 𝑅3 = 𝑉𝑟𝑒𝑓𝐼𝑅2𝑅3𝑅2 + 𝑅3 = 195 Ом
Мы можем использовать постоянный стандартный резистор 150 Ом плюс потенциометр 100 Ом, что дает нам диапазон для точной настройки. Расчетные значения являются приблизительными, в реальной цепи ток внутреннего источника опорного напряжения также является значительным (между 0,8 — 2 мА для AN6651), это приведет к изменению тока двигателя.
Добавление потенциометра позволяет установке регулировать скорость и должна быть откалибрована через некоторое время, чтобы двигатель прогрелся до рабочей температуры, чтобы минимизировать результирующий сдвиг сопротивления.
132-100 и AN6651 Цепь регулятора скоростиПрецизионные микроприводы 132-100 PCB с AN6651
Прецизионные микроприводы 132-100 PCB с AN6651
Регулятор скорости с дискретным операционным усилителем
Это улучшенная версия схемы операционного усилителя, описанной выше, с использованием специальной ИС.Основным улучшением является работа при низком напряжении благодаря использованию опорного сигнала с малой шириной запрещенной зоны. Использование этого дискретного компонента минимизирует размер схемы, что идеально подходит для современных небольших корпусов.
В этой схеме компенсационное напряжение берется с последовательного резистора R8 , значение которого меньше внутреннего сопротивления двигателя для уменьшения потерь мощности. Вторая опора моста состоит из R6 и R7 . Соотношение этих резисторов должно быть таким же, как R8 и сопротивление обмотки двигателя. R8 можно выбрать в качестве типичного значения, тогда следует выбрать R6 и R7 для компенсации внутреннего падения напряжения. Для стабильной работы коэффициент R7 / R6 должен быть больше Rm / R8 .
Эта схема должна подходить для небольших двигателей с номинальным напряжением 1 В ~ 2 В.
Схемана основе ОУ стабилизации скорости двигателя
Регулятор скорости на транзисторах
Эта недорогая схема построена на транзисторах для управления скоростью двигателя, хотя она не обеспечивает такой же точности, как операционный усилитель, ее можно сделать очень маленькой и полезной для недорогих приложений.
В этой схеме опорное напряжение составляет 1,2 В, а D1 работает как опорное напряжение. Обратная ЭДС двигателя больше опорного напряжения — в зависимости от R2 , R3 и R4 делитель напряжения :
- Во-первых, нам нужно установить коэффициент делителя напряжения, наше опорное напряжение составляет 1,2 В, а когда желаемая обратная ЭДС составляет 3,6 В, делитель напряжения R2 , R3 и R4 должен иметь коэффициент: 3.61.2 = 3
- Итак, у нас есть максимальный диапазон для точной настройки схемы, это нужно делать, когда потенциометр ( R3 ) находится в среднем положении. Теперь нам нужно разделить оставшееся значение между каждым из других резисторов.
- Когда мы знаем наш коэффициент делителя напряжения, выбрать R6 и R8 легко. Нам нужно иметь такое же соотношение между делителем напряжения R6 , R8 и внутренним сопротивлением двигателя.
Эта схема разработана для одной постоянной скорости, и изменение скорости с помощью триммера влияет на компенсацию скорости.Таким образом, триммер следует использовать только для настройки этой схемы в диапазонах очень низких скоростей. Чтобы использовать эту схему с широким диапазоном настройки скорости, нам необходимо внести некоторые изменения:
Двухтранзисторный регулятор скорости двигателяТрехтранзисторный регулятор скорости двигателя
Эта схема работает по тем же правилам, что и предыдущая версия с двумя транзисторами, но основным улучшением является увеличение коэффициента усиления для опорного напряжения транзистором Q2 . Это позволяет нам использовать микромощный источник опорного напряжения с шириной запрещенной зоны, который более стабилен, чем стандартные диоды.Еще одно улучшение по сравнению с добавлением Q2 — это температурная компенсация Vbe между транзисторами Q1 и Q2 .
Расчет этой схемы начинается с задания напряжения обратной ЭДС. В этой схеме опорное напряжение равно LM385 — 2,5 В и напряжение Vbe из Q2 : 𝑉𝑟𝑒𝑓 = 𝑉𝑏𝑔𝑟𝑒𝑓 + 𝑉𝑏𝑒 = 1,2𝑉 + 0,7𝑉 = 1,9𝑉
.Если нам нужно, чтобы Vbemf составляло 3,8 В, коэффициент делителя напряжения R2 , R4 и R3 должен быть 2: 1.Потенциометр ( R3 ) предназначен для точной настройки этого напряжения, но в этой схеме изменение скорости с помощью триммера вызовет изменение компенсации. Таким образом, R3 предназначен только для окончательной настройки скорости в небольшом диапазоне, скажем, 5% или меньше, и должен использоваться только для компенсации допуска других значений компонентов.
После установки этого делителя напряжения выбрать значение R6 и R7 легко, когда мы знаем внутреннее сопротивление двигателя. Эквивалентное параллельное соединение R6 , R7 и сопротивление двигателя должны иметь такое же соотношение, как R2 , R3 и R4 делителя напряжения (с потенциометром R3 , установленным в среднее положение).
Прецизионные микроприводы Трехтранзисторный контроллер скорости двигателяПрецизионные микроприводы Трехтранзисторный контроллер скорости двигателя
Режим переключения аналоговый регулятор скорости
В этой статье описывается простая реализация аналогового регулятора скорости двигателя, основанная на измерении обратной ЭДС и управляющем сигнале ШИМ.
При использовании ШИМ с двигателем постоянного тока все еще можно управлять скоростью двигателя без каких-либо датчиков. Используя типичный недорогой драйвер с одним полевым МОП-транзистором, можно измерить обратную ЭДС, когда двигатель вращается, а транзистор выключен.
Управление частотой вращения двигателя с использованием обратной ЭДС в режиме переключения аналоговая схемаЭтот контроллер состоит из модулятора ШИМ, выходного транзистора и схемы «выборки и удержания» (иногда известной как схемы «слежения и удержания»). Модулятор PWM имеет управляющий вход, который позволяет изменять рабочий цикл. Если вы не знакомы, это может показаться сложным, но общая идея довольно проста:
- , когда транзистор включен, напряжение питания подключено к клеммам двигателя, ток двигателя Im протекает через двигатель, заставляя его ускоряться
- , когда транзистор выключен, двигатель действует как генератор и Вм равно к Vbemf , который пропорционален скорости двигателя.Срабатывает схема выборки и хранения, которая сохраняет выборку Vbemf в конденсаторе
Узел суммирования затем вычисляет разницу между желаемой скоростью и текущей скоростью, поскольку обе представлены напряжением (желаемое напряжение и Вбемф соответственно). Это напряжение ошибки используется для управления скоростью двигателя путем увеличения или уменьшения рабочего цикла модулятора ШИМ.
Из-за индуктивного характера двигателей постоянного тока измерение обратной ЭДС невозможно сразу после выключения транзистора.Когда транзистор переключается, возникает сильный индуктивный выброс, и через реверсивный диод протекает индуктивный рециркуляционный ток Ir . Необходима небольшая задержка, пока напряжение обратной ЭДС не станет стабильным:
Измерение сигнала ШИМ на клеммах двигателяЭтот метод управления может быть выполнен с использованием только аналоговых компонентов или с помощью цифрового микроконтроллера. Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
Регулятор скорости двигателя на основе измерения обратной ЭДС и выхода ШИМВ этой схеме напряжение на R2 представляет желаемую скорость, IC1A работает как усилитель ошибки и ПИД-регулятор.
Схема ШИМ-модулятора построена на IC1B и IC2 , где IC1B работает как генератор треугольных волн с частотой, определяемой R12 и C4 .
IC2 действует как компаратор, который сравнивает напряжение треугольного сигнала с выхода IC2 с установочным напряжением от потенциометра R15 . Когда напряжение сигнала треугольника ниже, чем напряжение от R15 , выход компаратора высокий и двигатель запитан.
Цепь выборки и хранения состоит из C3 , R10 , D2 , Q1 , R13 . Когда двигатель питается от T1 , Q2 включен, а узел R13 и D2 закорочен на землю, что не позволяет ему сделать выборку, когда на двигатель подается напряжение Vcc. Диод D2 предотвращает разряд C3 при включенном Q1 .
Когда T1 выключен, Q2 также выключен, и Vbemf может заряжать конденсатор C3 .Напряжение на C3 находится на неинвертирующем входе усилителя ошибки, IC1A . Этот усилитель вычитает текущее напряжение скорости из желаемого напряжения скорости (устанавливается потенциометром R2 ). При увеличении обратной ЭДС выходное напряжение на IC1A также увеличивается — это смещает уровень сигнала треугольника вверх пропорционально ошибке скорости. Если уровень сигнала треугольника увеличивается, то время, когда выходной транзистор включен, уменьшается, и коэффициент заполнения ШИМ также уменьшается.
Этот усилитель ошибки работает как схема ПИД-регулирования, где коэффициент усиления определяется 5𝑅5 + 𝑅10, а постоянная времени определяется параметрами R5 и C2 .
Схема выборки и хранения очень проста, потому что время выборки равно состоянию выключения в рабочем цикле ШИМ, поэтому напряжение выборки напрямую зависит от рабочего цикла. Кроме того, это менее важно, если схема используется для управления приложением, которое не использует полный диапазон скорости двигателя.Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменить время заряда / разряда C3 .
Диапазон изменения рабочего цикла ШИМ (от приложенного напряжения ошибки) определяется соотношением от R7 до R8 || R9 , однако, поскольку схема выборки и хранения очень проста, этот диапазон не должен быть очень широким.
Эта схема предназначена для работы в малом диапазоне ШИМ, максимальная нагрузка ШИМ снижается за счет задержки индуктивной нагрузки двигателя, и с ограничением схемы выборки и удержания этот метод не следует использовать для широкого диапазона. диапазон регулирования скорости.
Это демонстрирует принцип работы, поэтому для практического использования настоятельно рекомендуется улучшить простую схему выборки и хранения. Например, схема на основе недорогого LF398 может обеспечить время выборки 10 мкс.
По сравнению с аналоговой схемой отрицательной обратной связи этот метод:
- снижает потери мощности
- может быть более стабильным, так как температура не влияет на напряжение обратной ЭДС (за счет изменения сопротивления обмотки)
Однако это также:
- не подходит для двигателей с высокой индуктивностью
- имеет узкий диапазон регулирования скорости
- имеет склонность к колебаниям
Информационный бюллетень
Подпишитесь, чтобы получать новые блоги, тематические исследования и ресурсы — прямо на ваш почтовый ящик.
Узнать больше
Ресурсы и руководства
Ознакомьтесь с примечаниями по применению наших продуктов, руководствами по дизайну, новостями и тематическими исследованиями.
Примеры из практики
Изучите нашу коллекцию тематических исследований, примеры нашей продукции в различных областях применения.
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и протестированный сложный механизм — мы всегда готовы помочь. Узнайте больше о нашей компании.
Подано в: С тегами:Контроллеры электродвигателей постоянного тока, потенциометр электродвигателя, контроллер постоянного тока 12 В
Несмотря на то, что электродвигатели являются одними из самых старых конструкций электродвигателей, электродвигатели постоянного тока по-прежнему актуальны и регулярно используются в современной промышленности. Их управляемость является залогом их долговечности — даже самая простая машина может преобразовать постоянный ток в механическое вращение.
Продолжение производства двигателей постоянного тока привело к производству контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию, но обеспечивают отличную производительность.Если вы ищете программируемый контроллер двигателя для своего приложения или проекта, вы найдете то, что вам нужно, здесь, в Allied Electronics.
Прочтите, чтобы узнать больше о контроллерах двигателей постоянного тока и их использовании.
Что такое контроллеры двигателей постоянного тока?
Контроллеры двигателей постоянного тока — это устройства, которые могут управлять положением, скоростью или крутящим моментом двигателя постоянного тока. Существует ряд контроллеров, от щеточных и бесщеточных до универсальных, каждый из которых позволяет оператору настраивать желаемое поведение двигателя с помощью своих механизмов.
Кривая крутящего момента двигателя постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя. Это упрощает управление ими с помощью программируемого контроллера мотора, так как снижение их скорости увеличивает их крутящий момент, и наоборот.
Для чего используются контроллеры двигателей постоянного тока?
Благодаря функциональности контроллеров двигателей постоянного тока они идеально подходят для ряда приложений. Их часто можно увидеть в солнечных панелях или батареях благодаря их превосходной способности запускать высокий крутящий момент и управлять высокоинерционными нагрузками, их скорость намного легче контролировать по сравнению с двигателями переменного тока.
Если вы хотите изменить направление своего приложения или проекта, вам подойдут двигатели постоянного тока и программируемые контроллеры двигателей. В отличие от двигателей переменного тока, вы можете быстро и легко запускать и останавливать двигатели постоянного тока.
Почему выбирают Allied Electronics для контроллеров двигателей постоянного тока?
Allied Electronics предлагает широкий выбор контроллеров двигателей постоянного тока, благодаря чему вы можете сузить область поиска до нужного вам типа. Функция поиска позволяет выполнять фильтрацию по таким характеристикам, как фаза, стиль монтажа, номинальный ток и номинальное напряжение, поэтому вы можете легко использовать это, чтобы найти точное соответствие для работы, над которой вы работаете.
Мы являемся ведущим авторизованным дистрибьютором контроллеров двигателей постоянного тока 12 В и других программируемых контроллеров двигателей в Северной Америке. У нас есть товары ведущих производителей, включая Siemens, Arcus Technology, Carlo Gavazzi и Adafruit Industries. Выбирая Allied Electronics, вы инвестируете в надежный и долговечный продукт.
Если у вас возникнут какие-либо вопросы, наша команда всегда готова помочь, так почему бы не связаться с вами, и мы сможем помочь вам в выборе продуктов. Вы также можете найти совет в нашем центре содержания для экспертов.
Контроль скорости двигателей постоянного тока
Соотношение, приведенное ниже, дает скорость двигателя постоянного тока
Приведенное выше уравнение показывает, что скорость зависит от напряжения питания V, сопротивления цепи якоря R a и потока поля Ф, создаваемого током возбуждения. На практике изменение этих трех факторов используется для регулирования скорости. Таким образом, существует три основных метода управления скоростью двигателей постоянного тока.
- Изменение сопротивления в цепи якоря: этот метод называется контролем сопротивления якоря или контролем реостата.
- Изменение потока поля Ф
Этот метод называется контролем потока поля. - Изменение приложенного напряжения.
Этот метод также называется контролем напряжения якоря.
1. Контроль сопротивления якоря (контроль реостата):
Рисунок: (a) Регулировка скорости постоянного тока. Подмешивающий двигатель регулировкой сопротивления якоря.
(b) Регулировка скорости двигателя серии DC с помощью регулирования сопротивления якоря.
В этом методе в цепь якоря вставлен переменный резистор R e .На рисунке (а) выше показан процесс подключения параллельного двигателя. В этом случае поле напрямую подключается к источнику питания, и поэтому на магнитный поток Ф не влияет изменение R e .
На рисунке (b) показан способ подключения внешнего сопротивления R e в цепи якоря двигателя постоянного тока. В этом случае на ток и, следовательно, на магнитный поток влияет изменение сопротивления цепи якоря.
Падение напряжения в R e снижает напряжение, приложенное к якорю, и, следовательно, скорость уменьшается.
Этот метод имеет следующие недостатки:
- Во внешнем сопротивлении R e тратится большое количество энергии.
- Управление ограничено, чтобы обеспечить скорость ниже нормальной, и этим методом нельзя добиться увеличения скорости.
- Для данного значения R e снижение скорости не является постоянным, а зависит от нагрузки двигателя.
Этот метод используется только для небольших двигателей.
2. Изменение потока поля Ф (Управление потоком поля):
Поскольку ток возбуждения создает магнитный поток, и если мы контролируем ток возбуждения, то можно управлять скоростью.В параллельном двигателе скорость можно регулировать, подключив переменный резистор R c последовательно с шунтирующей обмоткой возбуждения. На схеме ниже резистор R c называется шунтирующим регулятором поля .
Рисунок: (a) Регулировка скорости параллельного двигателя постоянного тока изменением магнитного потока.
(b) Дивертер, подключенный параллельно к серии электродвигателя постоянного тока.
дает ток возбуждения шунта
Любым из методов можно изменять ток возбуждения серийного двигателя:
- Переменное сопротивление R d подключено параллельно с последовательной обмоткой возбуждения.Параллельно подключенный резистор называется дивертором . Часть основного тока отводится через R d .
- Второй метод использует элемент управления с касанием.
Здесь ампер-витки меняются путем изменения числа витков возбуждения. Такое расположение используется в электрической тяге.
Рисунок: Последовательное поле с резьбой на двигателе постоянного тока
Преимущества полевого управления следующие:
- Это простой и удобный способ.
- Потери мощности в шунтирующем поле невелики, потому что шунтирующий ток возбуждения I sh очень мал.
3. Контроль напряжения якоря:
Мы можем контролировать скорость двигателей постоянного тока, изменяя напряжение, подаваемое на якорь. Система управления скоростью Ward-Leonard работает на этом принципе управления напряжением якоря. В этой системе M — это главный двигатель постоянного тока, скорость которого необходимо регулировать, а G — это генератор постоянного тока с отдельным возбуждением. Генератор G приводится в действие трехфазным приводным двигателем, который может быть асинхронным или асинхронным.Комбинация приводного двигателя переменного тока и генератора постоянного тока называется комплектом двигатель-генератор (M-G).
Рисунок: Привод Уорда-Леонарда
Преимущества приводов Уорда-Леонарда:
- Этот привод имеет плавное регулирование скорости двигателей постоянного тока в широком диапазоне в обоих направлениях.
- Обладает собственной способностью к рекуперативному торможению.
- За счет использования перевозбужденного синхронного двигателя в качестве привода для генератора постоянного тока компенсируются запаздывающие реактивные вольт-амперы установки.Таким образом улучшается общий коэффициент мощности установки.
Недостатки классической системы Уорда-Леонарда:
- Его первоначальная стоимость высока из-за использования двух дополнительных машин (набор M-G) того же номинала, что и основной двигатель постоянного тока.
- Имеет большие размеры и вес.
- Требуется большая площадь пола и дорогостоящий фундамент.
- Требуется очень частое обслуживание.
- Потери больше из-за меньшего КПД.
- Его привод производит больше шума.
для двигателей постоянного тока и BL
Контроллеры скорости FAULHABER специально разработаны для получения максимальной отдачи от двигателей FAULHABER DC и BL. Они компактны, просты в эксплуатации и обеспечивают точное и эффективное управление скоростью. Индивидуальный контроль скорости можно легко настроить с помощью компьютера и бесплатного программного обеспечения «FAULHABER Motion Manager».
Speed Control от FAULHABER — это высокодинамичные контроллеры скорости для управления:
В зависимости от размера и состояния поставки на контроллере скорости могут использоваться различные комбинации двигателей и датчиков.Различные размеры, а также гибкие возможности подключения открывают широкий спектр применений в таких областях, как лабораторная техника и производство оборудования, технологии автоматизации, манипуляционные и инструментальные устройства, станки или насосы.
Регуляторы скорости от FAULHABER могут быть адаптированы к данному приложению с помощью программного обеспечения FAULHABER Motion Manager. С помощью контроллеров скорости можно настроить рабочий режим, параметры контроллера, а также тип и масштаб спецификации уставки.Для настройки контроллеров скорости используется USB-адаптер для программирования.
Режимы работы двигателей в сочетании с регуляторами скорости
Скорость двигателя регулируется с помощью ПИ-регулятора с изменяемыми параметрами. В зависимости от версии скорость в регуляторе скорости определяется через подключенную сенсорную систему или без сенсора на основе тока двигателя. Задание уставки может быть выполнено с использованием аналогового значения или сигнала ШИМ. Направление вращения меняется на противоположное посредством отдельного переключающего входа.Кроме того, можно считывать сигнал скорости регулятора скорости через частотный выход. Двигатели могут дополнительно работать в качестве регулятора напряжения или в режиме фиксированной скорости.
Защитная функция регуляторов скоростиFAULHABER Регуляторы скорости определяют температуру обмотки двигателя по его нагрузочной характеристике. Динамически в результате доступен пиковый ток, который обычно в 2 раза больше, чем постоянный ток.При постоянно более высокой нагрузке ток ограничивается установленным постоянным током. В случае частого реверсирования с большими присоединенными массами рекомендуется использовать контроллер движения.
|
|