Регулирование скорости вращения двигателей постоянного тока
Электропривод, построенный на основе двигателей постоянного тока используются в металлургической, машиностроительной, химической, угольной, деревообрабатывающей и других отраслях промышленности.
Применение электропривода способствует созданию промышленного оборудования, в том числе станков с высокой степенью автоматизации. При этом в автоматизированном электроприводе главное место занимает такая задача, как регулирование скорости вращения двигателей постоянного тока.
Основные способы управления скоростью вращения двигателя постоянного тока:
1) изменение тока в цепи обмотки возбуждения при стабильном напряжении на обмотке якоря;
2) изменение напряжения на обмотке якоря при стабильном токе в цепи обмотки возбуждения;
3) изменение напряжения на обмотке якоря, а также изменение тока в цепи обмотки возбуждения.
Для изменения величин напряжения на обмотке якоря или силы тока в цепи обмотки возбуждения применяются чаще всего управляемые выпрямители. Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме. При этом конструктивное исполнение двигателей постоянного тока способствует тому, что необходимая мощность выпрямителей для цепи обмотки возбуждения намного меньше мощности выпрямителя для обмотки якоря. Однако, существуют также и недостатки регулирования частоты вращения двигателя изменением силы тока в цепи обмотки возбуждения. Основным недостатком является уменьшение быстродействия исполнения задаваемой скорости, другими словами, худшие динамические свойства автоматизированого электропривода. Для некоторых применений эти показатели являются не критичными, поэтому при проектировании следует руководствоваться требованиями к приводу в соответствии с техническим заданием.
Если технологический процесс включает необходимость изменения направления вращения двигателя(реверс), эта возможность также может быть выполнена одним из способов — в цепи обмотки якоря или обмотки возбуждения. Такая возможность реализуется изменением полярности управляющего постоянного напряжения или тока.
Узнайте условия проведения наладки промышленной электроники, отправив запрос на [email protected]
Время выполнения запроса: 0,00234699249268 секунд.
5. Способы регулирования частоты вращения двигателей постоянного тока
Принцип
работы ДПТ. Вмашине должно быть две
основные части: первая часть – создает
магнитный поток, вторая часть – в которой
индуктируется ЭДС. Первая часть в машине
постоянного тока неподвижна. К станине
(1) крепятся штампованные полюса (2) на
которых располагается обмотка возбуждения
(3). Вторая часть – якорь. Якорь вращается.
Представляет собой цилиндр набранный
из листов электротехнической стали
(4).В наружной части якоря расположены
пазы, где укладываются секции обмотки
(5). Каждая секция соединяется с пластинами
коллектора (6).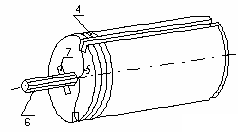
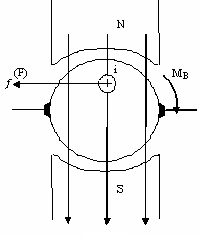
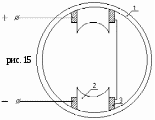
Рис. 223
 Электромагнитный момент зависит
от потока и тока якоря. В генераторном
режиме электромагнитный момент является
тормозным. Уравнение равновесного
состояния моментов запишется
Электромагнитный момент зависит
от потока и тока якоря. В генераторном
режиме электромагнитный момент является
тормозным. Уравнение равновесного
состояния моментов запишется  ,
где
,
где —
механический момент на валу генератора,
—
механический момент на валу генератора, —
момент хх,
—
момент хх, —
электромагнитный момент. Основное
уравнение движения электропривода
—
электромагнитный момент. Основное
уравнение движения электропривода
 ,
, ,
, ,
Если
,
Если ,
, ,
, .
Если
.
Если
 ,
, .
.
 Принцип
регулирования частоты вращения. С точки зрения регулирования частоты
вращения, двигатель постоянного тока
является универсальным. Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы:
Принцип
регулирования частоты вращения. С точки зрения регулирования частоты
вращения, двигатель постоянного тока
является универсальным. Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы: 
Сопротивлением в цепи якоря. Уравнения токов до и после введения сопротивления
 ,
,  ,
откуда
,
откуда ,
т. е. ток
,
т. е. ток и момент уменьшается (
и момент уменьшается (
 и
скорость
и
скорость уменьшается. С уменьшением скорости
уменьшается. С уменьшением скорости ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости .
Регулирование частоты вращения
сопротивлением в цепи якоря осуществляется
в сторону уменьшения скорости.
.
Регулирование частоты вращения
сопротивлением в цепи якоря осуществляется
в сторону уменьшения скорости.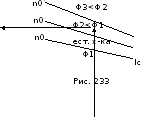
Потоком.
 ,
, ,
их отношение
,
их отношение .
Уравнение5.1.моментов
.
Уравнение5.1.моментов  .
Уменьшим поток , Ток якоря возрос, тогда
.
Уменьшим поток , Ток якоря возрос, тогда ,
то
,
то и
и
Напряжением. Регулирование частоты вращения производится следующими способами: А) Система генератор-двигатель (Г-Д). Б) Тиристорный преобразователь-двигатель (ТП-Д). В) Широтно-импульсное регулирование.
 А)
Система Г-Д, рис.234.
А)
Система Г-Д, рис.234.  .
Увеличивая ток возбуждения генератораiвг,
возрастает поток Фг и Ег,
а следовательно увеличивается напряжение
на якоре двигателя и скорость возрастает.
.
Увеличивая ток возбуждения генератораiвг,
возрастает поток Фг и Ег,
а следовательно увеличивается напряжение
на якоре двигателя и скорость возрастает.
Б)
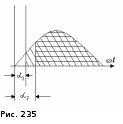
Тиристорный преобразователь-двигатель.
Увеличивая угол управления  — площадь полупериода уменьшается,
уменьшается среднее значение напряжения
-Uср,
а следовательно уменьшается скорость
вращения.
— площадь полупериода уменьшается,
уменьшается среднее значение напряжения
-Uср,
а следовательно уменьшается скорость
вращения.
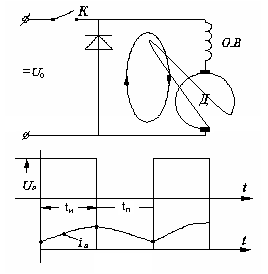
В) Широтно-импульсное регулирование.
Рис. 236
Изменяя время импульса tи изменяется скважность ,
гдеtи — время импульса; t
,
гдеtи — время импульса; t .
.
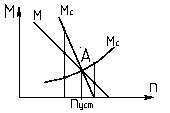
6.Способы регулирования активной и реактивной мощности синхронной машины.
Способы регулирования активной и реактивной мощности синхронного генератора. Как только что видели, что если изменять возбуждение генератора, то тем самым будем изменять реактивную мощность, отдавать, либо потреблять. Регулировать активную мощность можно только изменяя механическую мощность со стороны паровой турбины, либо гидротурбины. При увеличении отдаваемой активной мощности, необходимо увеличить и механическую мощность со стороны турбины.
Пуск СД. для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:1 Пуск с помощью вспомогательного двигателя ; 2Асинхронный пуск двигателя.
1.Пуск
в ход синхронного двигателя с помощью
вспомогательного двигателя может быть
произведен только без механической
нагрузки на его валу, т.е. практически
вхолостую. В этом случае на период пуска
двигатель временно превращается в
синхронный генератор, ротор которого
приводится во вращение небольшим
вспомогательным двигателем до n=0,95n
2. синхронный двигатель на время пуска превращается в асинхронный. Для возможности образования асинхронного пускового момента в пазах полюсных наконечников явнополюсного двигателя помещается пусковая короткозамкнутая обмотка. Процесс пуска синхронного двигателя осуществляется в два этапа. При включении обмотки статора (1) в сеть в двигателе образуется вращающее поле, которое наведет в короткозамкнутой обмотке ротора (2) ЭДС. Под действием, которой будет протекать в стержнях ток. В результате взаимодействия вращающего магнитного поля с током в короткозамкнутой обмотке создается вращающий момент, как у асинхронного двигателя. За счет этого момента ротор разгоняется до скольжения близкого к нулю (S=0,05), рис. 313. На этом заканчивается первый этап. Чтобы ротор двигателя втянулся в синхронизм, необходимо создать в нем магнитное поле включением в обмотку возбуждения (3) постоянного тока (переключив ключ К в положение 1). Так как ротор разогнан до скорости близкой к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно будут находить друг на друга. И после ряда проскальзываний, противоположные полюса притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной, рис. 313. На этом заканчивается второй этап пуска.
 при
при . При недовозбужденном синхронном
двигателе составляющей напряжения -Е0 соответствует ток I,
который отстает от напряжения Uc
на угол φ.
Реактивная составляющая тока IL будет отставать на 900 от вектора напряжения Uc,
т.е. этот ток чисто индуктивный. Значит,
при недовозбуждении двигатель будет
потреблять из сети индуктивный ток, а
следовательно будет потреблять из сети
и реактивную мощность.
. При недовозбужденном синхронном
двигателе составляющей напряжения -Е0 соответствует ток I,
который отстает от напряжения Uc
на угол φ.
Реактивная составляющая тока IL будет отставать на 900 от вектора напряжения Uc,
т.е. этот ток чисто индуктивный. Значит,
при недовозбуждении двигатель будет
потреблять из сети индуктивный ток, а
следовательно будет потреблять из сети
и реактивную мощность.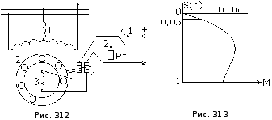
При
увеличении возбуждения величина –Е01 увеличится, а ток I
уменьшится до Ia=I1 и будет минимальным. При этом режиме СД
будет работать с cosφ=1
и реактивная мощность, не будет ни
потребляться, ни отдаваться в сеть. При
дальнейшем увеличении тока возбуждения
составляющая напряжения будет равна
–Е011,
а ток I11 , будет опережать вектор напряжения
сети на угол φ1.
Этот режим соответствует перевозбужденному
режиму. Реактивная составляющая тока
будет емкостной (опережает вектор Uc
на 900).
Этот режим будет соответствовать отдаче
реактивной мощности в сеть. Этот режим
аналогичен включению статических
емкостей в сеть.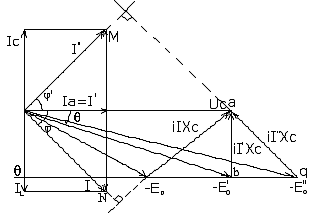
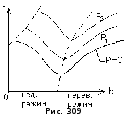
Итак видим, что если изменять ток возбуждения iB, то величина тока статора I будет изменяться по величине и по фазе, т.е. можно регулировать cosφ. Это ценное свойство и определяет использование синхронных двигателей. Зависимости тока статора I от тока возбуждения iв, I=f(iв) называются U-образные характеристики, рис. 309. Р2 > Р1. Характеристики снимаются при P=const. Режим работы соответствующий току возбуждения от 0 до пунктирной линии недовозбужденный, а за пунктирной линией – перевозбужденный с отдачей реактивной энергии в сеть.
Регулирование скорости вращения двигателей постоянного тока с параллельным возбуждением
Из уравнения механической характеристики (11) и рис. 10 следует, что скорость вращения двигателя постоянного тока можно регулировать, изменяя один из параметров: сопротивление цепи якоря rя, магнитный поток двигателя Ф или напряжение питания U.
Регулирование скорости двигателя постоянного тока с параллельным возбуждением изменением сопротивления цепи якоря применяется редко, так как оно неэкономично и обладает теми же недостатками, что и реостатное регулирование скорости асинхронных двигателей с фазовым ротором. Как и у асинхронных двигателей регулирование по этому способу производится с постоянным моментом. Обычный диапазон регулирования: nmax/nmin=2:1.
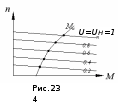
Широкое распространение получило регулирование скорости изменением магнитного потока двигателя, осуществляемое с помощью реостата R2 (рис. 10), включенного в цепь обмотки возбуждения. Согласно формулам (12) и (14) каждому значению магнитного потока Ф соответствуют определенные значения п0 и b. Поэтому при изменении магнитного потока двигателя его механические характеристики изображаются прямыми 5…8, не параллельными естественной механической характеристике 7, (рис. 10). Регулирование скорости изменения магнитного потока двигателя осуществляется просто и достаточно экономично, так как ток возбуждения мал по сравнению с током якоря.
С учетом выражений (4), (9) и (10)
 (16)
(16)
Предельно допустимый ток якоря Iя определяется условиями нагрева и поэтому при регулировании скорости двигателя не изменяется. Тогда согласно формуле (16) мощность двигателя при изменении магнитного потока остается постоянной. Следовательно, регулирование скорости двигателя изменением магнитного потока является регулированием с постоянной мощностью. Диапазон регулирования скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока лежит в пределах nmax/nmin = (2:1)…(4:1).
Регулирование скорости изменением магнитного потока используется в комплектных регулируемых приводах серии ПКВ. В этих приводах двигатель подключается к сети переменного тока через трансформатор и трехфазный выпрямительный мост на кремниевых вентилях. Номинальная мощность приводов серии ПКВ 6 –25 кВт, обеспечиваемый диапазон бесступенчатого регулирования 2:1.
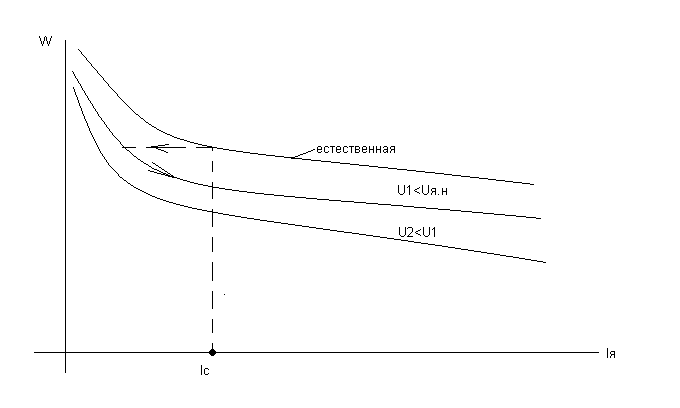
Регулирование скорости вращения двигателя постоянного тока изменением напряжения питания осуществляется при постоянном магнитном потоке двигателя. В этом случае к обмотке возбуждения двигателя подводится постоянное напряжение, а якорь двигателя подключают к источнику регулируемого напряжения, т. е. по существу используется двигатель с независимым возбуждением. Регулирование скорости изменением напряжения достаточно экономично, так как оно не связано с дополнительными потерями в двигателе. Однако для такого регулирования требуются специальные источники регулируемого напряжения, вследствие чего общий к. п. д. системы уменьшается.
Из выражения (9) следует, что регулирование изменением напряжения является регулированием с постоянным моментом, так как магнитный поток двигателя Ф и предельно допустимый ток якоря Iя остаются неизменными. Согласно уравнению (11) линейные механические характеристики двигателя, соответствующие различным значениям напряжения питания U, расположены одна под другой и параллельны естественной. Диапазон регулирования скорости вращения двигателя изменением напряжения обычно не превышает 5:1. Регулирование скорости двигателей изменением напряжения широко используется в системах автоматического управления и регулирования.
Регулируемое напряжение для питания двигателя постоянного тока можно получить, например, с помощью электромашинного преобразователя. Такой преобразователь вместе с двигателем привода машины называют системой генератор – двигатель (сокращенно Г – Д).
С истемаГ – Д (рис. 12) состоит из первичного асинхронного
(или любого другого) двигателя М1, генератора
постоянного тока Г, возбудителя Г
В и
исполнительного двигателя постоянного
тока М2, используемого
для непосредственного привода машины.
Двигатель М1 приводит
во вращение генератор Г
с независимым
возбуждением и возбудитель Г
В –
небольшой генератор с самовозбуждением
(параллельным или смешанным). От
возбудителя ГВ питаются
обмотки возбуждения генератора ОВГ и
двигателя ОВМ. Цепь
якоря двигателя М2 подключена
к генератору Г.
истемаГ – Д (рис. 12) состоит из первичного асинхронного
(или любого другого) двигателя М1, генератора
постоянного тока Г, возбудителя Г
В и
исполнительного двигателя постоянного
тока М2, используемого
для непосредственного привода машины.
Двигатель М1 приводит
во вращение генератор Г
с независимым
возбуждением и возбудитель Г
В –
небольшой генератор с самовозбуждением
(параллельным или смешанным). От
возбудителя ГВ питаются
обмотки возбуждения генератора ОВГ и
двигателя ОВМ. Цепь
якоря двигателя М2 подключена
к генератору Г.
Изменяя сопротивление реостата R1 в цепи возбуждения генератора Г, можно изменить напряжение на его зажимах и, следовательно, скорость вращения двигателя М2. С помощью реостата R2 можно изменять магнитный поток двигателя М2. Таким образом, система Г – Д позволяет регулировать скорость вращения двигателя изменением как напряжения, так и магнитного потока. Общий диапазон регулирования равен произведению диапазонов регулирования обоими способами и обычно составляет (10: 1)…(15: 1), но может достигать (20: 1)…(30: 1).
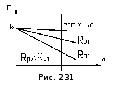
М еханические
характеристики двигателя в системеГ – Д приведены на рис. 13. Пуск двигателя
осуществляется при полном магнитном
потоке подключением обмотки возбуждения
генератора ОВГ переключателем В1 (рис.
12)
еханические
характеристики двигателя в системеГ – Д приведены на рис. 13. Пуск двигателя
осуществляется при полном магнитном
потоке подключением обмотки возбуждения
генератора ОВГ переключателем В1 (рис.
12)
Ввиду большого индуктивного сопротивления обмотки ОВГ ток в ней нарастает медленно, а напряжение, подводимое к двигателю, повышается постепенно. Пуск двигателя можно форсировать, закорачивая на время пуска сопротивление R3 выключателем В2.
Сопротивление R4 является разрядным. Замедляя уменьшение магнитного потока и снижая тем самым э. д. с. самоиндукции, оно предохраняет изоляцию обмотки возбуждения от пробоя в случае обрыва или отключения цепи возбуждения.
Реверс электродвигателя М2 осуществляется изменением направления тока в обмотке возбуждения генератора ОВГ с помощью переключателя В1 (или другого аналогичного устройства). Основными недостатками системы ГД являются относительно низкий к. п. д. (0,6…0,7), высокая стоимость, превышающая стоимость асинхронного двигателя в 8…10 раз, и значительные размеры. Поэтому в современных литейных машинах система Г – Д применяется редко (например, в центробежных машинах).
Иногда в качестве источника регулируемого напряжения для питания двигателей постоянного тока используются электромашинные усилители (ЭМУ) с поперечным магнитным потоком, например, в приводе электродов дуговой печи (рис. 14).
Экспериментально установлено, что наиболее экономичный режим плавки происходит при определенной мощности дуги. Система управления автоматически стабилизирует эту мощность путем изменения дугового промежутка. Напряжение дуги Uд и ток Iд подаются через выпрямители Bn1 и Вп2 на сравнивающее устройство. Если мощность дуги соответствует заданному значению, то напряжение Uy на потенциометре R и на обмотке управления ОУ1 равно нулю. ЭМУ не возбуждается, и якорь двигателя М находится в покое (не вращается).
П ри
отклонении в режиме плавки изменяется
соотношение напряжения и тока дуги,
вследствие чего на обмоткеОУ1 появляется
управляющее напряжение Uy.
ЭМУ возбуждается,
на его выходных клеммах появляется
напряжение, и двигатель М начинает
перемещать электрод Э, устраняя
появившееся отклонение от заданного
режима, устанавливаемого потенциометром R. Для
компенсации неравномерности нагрузки
при опускании и подъеме электрода на
вторую обмотку управления ОУ2 подается
напряжение, компенсирующее вес электрода.
ри
отклонении в режиме плавки изменяется
соотношение напряжения и тока дуги,
вследствие чего на обмоткеОУ1 появляется
управляющее напряжение Uy.
ЭМУ возбуждается,
на его выходных клеммах появляется
напряжение, и двигатель М начинает
перемещать электрод Э, устраняя
появившееся отклонение от заданного
режима, устанавливаемого потенциометром R. Для
компенсации неравномерности нагрузки
при опускании и подъеме электрода на
вторую обмотку управления ОУ2 подается
напряжение, компенсирующее вес электрода.
В последние годы все шире применяются приводы с полупроводниковыми управляемыми вентилями – тиристорами (рис.15). Тиристор имеет четырехслойную структуру типа р-п-р-п. Вывод от внутренней базовой области (р-области) служит управляющим электродом. При отсутствии сигнала на управляющем электроде тиристор остается в запертом состоянии при напряжении питания прямой полярности, меньшем определенного предела (напряжения включения).
При поступлении сигнала на управляющий электрод тиристор переходит в открытое состояние при напряжении питания, меньшем напряжения включения. После открывания тиристора управляющий электрод теряет свои управляющие свойства, а запирание тиристора возможно уменьшением силового тока до определенного предела, называемого током выключения. Падение напряжения на тиристоре в открытом состоянии не превышает 1 В.
Тиристоры отличаются высокой экономичностью, надежностью в работе, безынерционностью, малыми размерами и массой. При работе они не создают радиопомех и имеют практически неограниченный срок службы. Отечественной промышленностью серийно выпускаются кремниевые управляемые вентили серий ВКУ и ВКУВ, рассчитанные на номинальный ток до 100 а. Начато производство тиристоров на ток до 250 а.
П ри
использовании тиристоров в выпрямителях
становится возможным получить регулируемое
напряжение для двигателей постоянного
тока. Так, в схеме нереверсивного
электропривода, разработанной для
двигателя мощностью 15кВт (рис.
15), регулируемое напряжение к якорю
двигателя М подводится
от трехфазного несимметричного мостового
выпрямителя на неуправляемых кремниевых
вентилях Д1…ДЗ и
тиристорах ДУ1…ДУЗ.
ри
использовании тиристоров в выпрямителях
становится возможным получить регулируемое
напряжение для двигателей постоянного
тока. Так, в схеме нереверсивного
электропривода, разработанной для
двигателя мощностью 15кВт (рис.
15), регулируемое напряжение к якорю
двигателя М подводится
от трехфазного несимметричного мостового
выпрямителя на неуправляемых кремниевых
вентилях Д1…ДЗ и
тиристорах ДУ1…ДУЗ.
Обмотка возбуждения ОВМ подключена к неуправляемому мостовому выпрямителю на вентилях Д…Д6.
Управление
тиристорами осуществляется при помощи
зарядных цепей R – C. Например,
при положительной полуволне напряжения
конденсатор С2 заряжается
через вентиль Д1 или ДЗ, сопротивление R7
и диод Д8. С
конденсаторов С1…СЗ напряжение
подается на управляющие электроды
тиристоров через токоограничивающие
сопротивления R4…R6. При
зарядке конденсатора открывается
соответствующий ему тиристор. Время
зарядки конденсатора и, следовательно,
момент открывания (угол открывания)
тиристора определяются постоянной
времени  =RC зарядного
контура и могут регулироваться
сопротивлением R7. В
зависимости от угла открывания тиристора
изменяется длительность протекания
тока через него в течение положительной
полуволны напряжения и, следовательно,
среднее значение выпрямленного
напряжения.
=RC зарядного
контура и могут регулироваться
сопротивлением R7. В
зависимости от угла открывания тиристора
изменяется длительность протекания
тока через него в течение положительной
полуволны напряжения и, следовательно,
среднее значение выпрямленного
напряжения.
Сопротивления R…R3 служат для разрядки конденсаторов С1…СЗ во время отрицательной полуволны напряжения.
Диапазон регулирования скорости двигателя в рассмотренной схеме равен 1…10. Для управления тиристорами в более сложных схемах используются насыщенные дроссели или устройства на транзисторах и маломощных тиристорах. Примером такого привода может служить привод типа ПКВУ с обратной связью по скорости и промежуточным полупроводниковым усилителем. Мощность привода 8 кВт. В диапазоне скоростей 15… 1500 об/мин колебание скорости вращения двигателя не превышает 5% при М = (0,25…1)МН.
Основным недостатком приводов, в которых регулирование напряжения осуществляется изменением угла открывания тиристоров, является значительное снижение cosφ при уменьшении скорости вращения двигателя. С целью повышения cosφ используют схемы, в которых регулируемое напряжение тиристорного выпрямителя алгебраически суммируется (складывается или вычитается) с постоянным нерегулируемым напряжением.
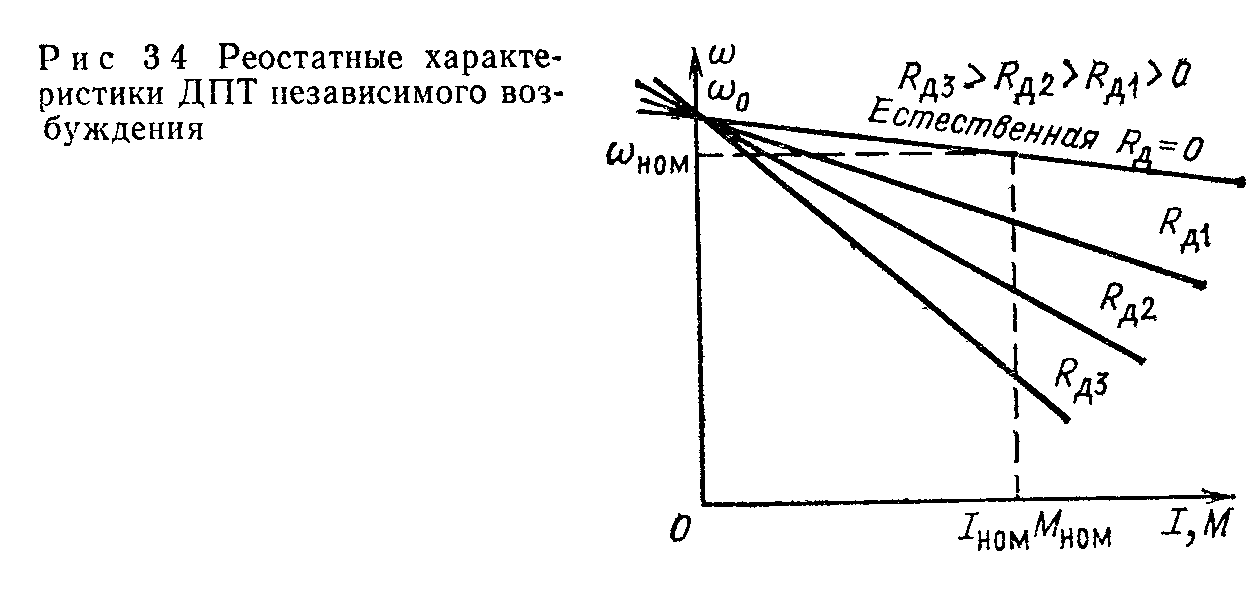
3.2. Регулирование скорости, тока и момента дпт независимого возбуждения с помощью резисторов в цепи якоря
Этот способ, часто называемый реостатным, является весьма простым по своей реализации и поэтому широко используется для регулирования скорости, тока и момента ДПТ. Семейство искусственных (регулировочных) характеристик ДПТ можно получить, проанализировав, например, как изменяется скорость холостого ДПТ 0и наклон его характеристик при варьировании сопротивления добавочного резистораRд,.Из (3.6а) видно, что0не зависит отRд,поэтому все искусственные характеристики пересекаются на оси скорости в точке с координатой=0;I=0;М=0.
Кроме того, наклон характеристики,
определяемый перепадом скорости  ,
пропорционален (при фиксированных
значениях токаIи
моментаМ) полному сопротивлению
якоря. Поэтому по мере увеличенияRд,наклон характеристик также увеличивается,
они становятся более мягкими.
,
пропорционален (при фиксированных
значениях токаIи
моментаМ) полному сопротивлению
якоря. Поэтому по мере увеличенияRд,наклон характеристик также увеличивается,
они становятся более мягкими.
Проведенный анализ позволяет изобразить искомое семейство электромеханических и механических характеристик в виде совокупности линий, показанных на рис. 3.4. При Rд=0 ДПТ имеет естественные механическую и электромеханическую характеристики, на которых находится точка номинального режима с координатамином,Iномином,Мном.
а) Регулирование скорости.Оценим данный способ регулирования скорости по основным показателям, рассмотренным в § 2.2.
1.Диапазон регулирования скорости небольшой и обычно не превосходит 2–3. Причина этого заключается в снижении жесткости характеристик по мере увеличенияRди, как будет показано далее, в значительных потерях мощности при больших диапазонах регулирования скорости.
2.Направление регулирования скорости–вниз от естественной характеристики.
3.Плавность регулирования скорости определяется плавностью измененияRд.Если сопротивление этого резистора изменяется плавно, то данный способ обеспечивает плавное регулирование скорости, если жеRдизменяется ступенчато, то и регулирование скорости будет неплавным. Чаще всего рассматриваемый способ обеспечивает ступенчатое регулирование скорости.
4.Стабильность скорости снижается по мере увеличения диапазона регулирования и в общем случае является невысокой.
5Экономичность регулирования скорости оценим, сопоставив требуемые капитальные затраты на реализацию данного способа и стоимость потерь мощности при регулировании. Капитальные затраты на приобретение добавочных резисторов невелики, так как стоимость используемых резисторов обычно мала. В то же время потери мощности и соответственно расход электроприводом электрической энергии и ее стоимость оказываются значительными. Покажем это
Потери мощности в ДПТ Ропределяются разностью мощностей, потребляемой из сети,P1=UIи полезной механическойP2=M,отданной с вала,

Выполнив несложные преобразования, получим
 ,(3.9)
,(3.9)
где  – относительный перепад скорости.
– относительный перепад скорости.
Из (3 9) видно, что уже при снижении скорости
в 2 раза по сравнению со скоростью
идеального холостого хода 0,
т. е. при и
и ,половина всей потребляемой из сети
мощностиP1идет
на потери мощности в самом ДПТ. Таким
образом, КПД привода уже приD=2
не превышает 50 %, а при больших диапазонах
снижается в еще большей степени
,половина всей потребляемой из сети
мощностиP1идет
на потери мощности в самом ДПТ. Таким
образом, КПД привода уже приD=2
не превышает 50 %, а при больших диапазонах
снижается в еще большей степени
6.Допустимую нагрузку ДПТ на искусственных характеристиках найдем, если в (3.3) положим Ф=ФномиI=Iном. Тогда получаемое выражение определит допустимый по условиям нормального нагрева момент ДПТ
 , (3.10)
, (3.10)
который оказывается равным номинальному моменту двигателя Мном. Таким образом, при работе ДПТ на искусственных характеристиках он может быть нагружен моментом нагрузки, равным номинальному моменту ДПТ, находясь при этом в нормальном тепловом режиме. Это заключение полностью справедливо для тех ДПТ независимого возбуждения, у которых условия охлаждения не изменяются по мере снижения их скорости. К таким ДПТ относятся, например ДПТ с независимой внешней вентиляцией и закрытые ДПТ без вентилятора. В тех же случаях, когда ДПТ охлаждается за счет собственного вентилятора на валу, при снижении скорости его охлаждение ухудшается, что требует соответствующего снижения момента нагрузки.
Несмотря на не очень высокие технико-экономические показатели, реостатное регулирование скорости из-за простоты своей реализации используется достаточно широко тогда, когда требуется небольшой диапазон регулирования скорости движения исполнительного органа или когда работа на пониженных скоростях имеет кратковременный характер. В частности, такое регулирование применяется в электроприводах подъемных кранов, некоторых металлорежущих станков, лифтов.
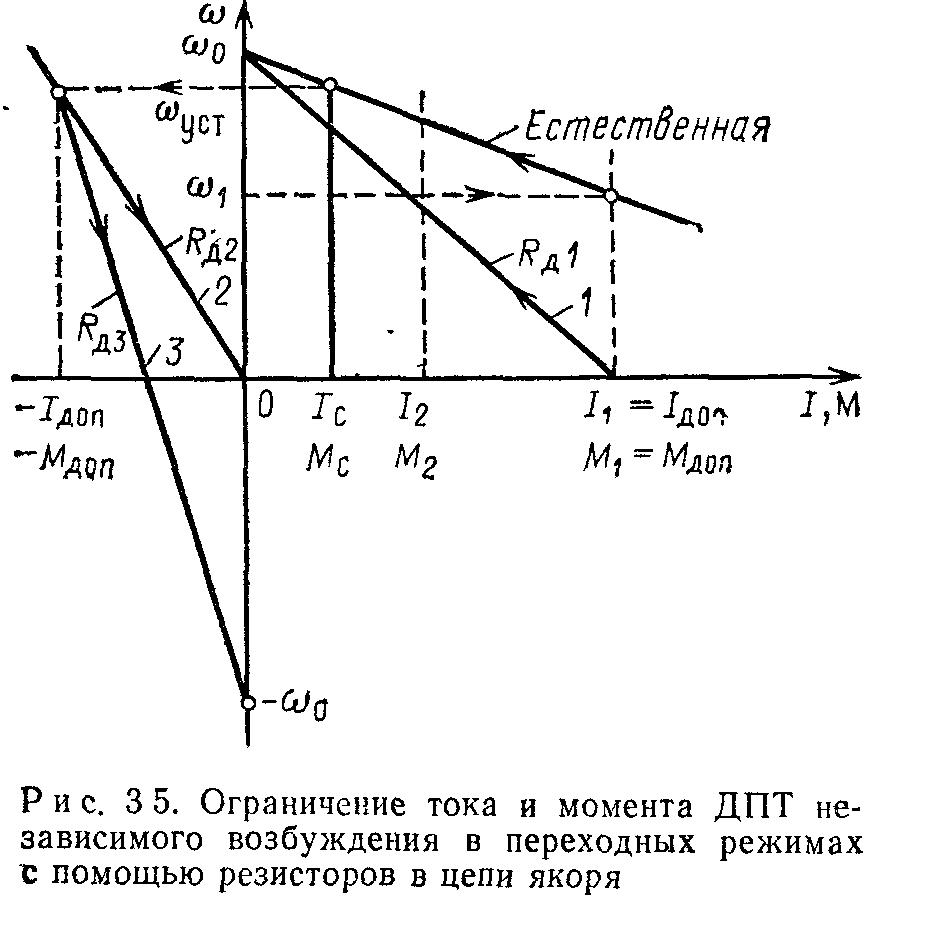
б) Регулирование (ограничение) тока и
момента.Получаемые искусственно
характеристики широко используются
для регулирования (ограничения) тока и
момента ДПТ независимого возбуждения
в переходных процессах, в которых ток
и момент могут принять недопустимо
большие значения для ДПТ. Так, в первый
момент пуска ДПТ находится в режиме
короткого замыкания (=0;E=0) и ток короткого
замыкания при его пуске по естественной
характеристике определяется соотношением .
Из-за малостиRя(доли ома или единицы ом)
.
Из-за малостиRя(доли ома или единицы ом) ,
в то время как допустимый для ДПТ
общепромышленного назначения ток
,
в то время как допустимый для ДПТ
общепромышленного назначения ток .
Таким образом, возникает необходимость
ограничения тока (и тем самым момента)
при пуске ДПТ, что может быть достигнуто
введением в цепь якоря добавочных
пусковых резисторов. Такая же необходимость
возникает при реверсе и торможении ДПТ
независимого возбуждения.
.
Таким образом, возникает необходимость
ограничения тока (и тем самым момента)
при пуске ДПТ, что может быть достигнуто
введением в цепь якоря добавочных
пусковых резисторов. Такая же необходимость
возникает при реверсе и торможении ДПТ
независимого возбуждения.
Для ограничения тока и момента при пуске в простейшем случае используется одна искусственная характеристика 1(рис. 3.5). Порядок пуска ДПТ следующий: вначале он начинает работать по характеристике1при наличии в цепи якоря добавочного резистораRд1. Далее при скорости1резисторRд1закорачивается и ДПТ переходит на естественную характеристику. Сопротивление резистораRд1выбирается из условия обеспечения допустимого тока в начальный момент пуска
 , (3.11)
, (3.11)
где Iдоп – допустимый ток.
Во многих случаях при пуске ДПТ используется не одна, а несколько искусственных характеристик. Их количество зависит от момента нагрузки электропривода и требований плавности переходных процессов.
Динамическое торможение ДПТ осуществляется отключением якоря от сети и замыканием его по схеме рис. 3.2 на резистор Rд2. Двигатель переходит на характеристику динамического торможения2(рис. 3.5), по которой и происходит торможение.
Сопротивление резистора Rд2определяется по допустимому броску
тока в первый момент перехода в режим
динамического торможения. Так как в
этот момент ,
тоEU,и сопротивлениеRд2определится как
,
тоEU,и сопротивлениеRд2определится как
 (3.12)
(3.12)
Реверс или торможение противовключением осуществляется изменением полярности напряжения на якоре ДПТ с одновременным вводом в якорь резистора Rд3. Двигатель переходит на характеристику3(рис. 3.5), попадая в режим торможения противовключением. В этом режиме ЭДС и напряжение сети совпадают по направлению, поэтому резисторRд3определяется по выражению
 .(3.13)
.(3.13)
В некоторых случаях для достижения более точного регулирования тока и момента в переходных режимах используется не одна искусственная характеристика, а несколько, как, например, при реализации пусковой диаграммы ДПТ (см. рис. 3.8). Отметим, что в рассматриваемом случае резисторы вводятся в цепь якоря только в переходных режимах работы ДПТ.
в) Расчет регулировочных резисторов.Выражения (3.11)–(3.13) позволяют рассчитать сопротивления добавочных резисторов в цепи якоря ДПТ по критерию допустимого тока. Рассмотрим теперь общие методы расчета сопротивлений регулировочных резисторов.
Задача формируется следующим образом: известны технические данные ДПТ и его естественная электромеханическая характеристика.

По условиям регулирования скорости, тока или момента задана искусственная характеристика (прямые 1–3на рис. 3.6). Требуется определить сопротивление добавочного резистора, при включении которого в цепь якоря будет обеспечена заданная характеристика.
Метод отрезков. Для получения расчетной формулы этого метода запишем согласно (3.4) выражение для скорости ДПТ на заданной искусственной характеристике при номинальных токе, моменте, магнитном потоке и напряжении
 . (3.14)
. (3.14)
Так как  ,
то (3.14) можно записать так:
,
то (3.14) можно записать так:
 (3.15)
(3.15)
где  – так называемое номинальное сопротивление
ДПТ, Ом.
– так называемое номинальное сопротивление
ДПТ, Ом.
Из (3.15) получаем следующее соотношение:
 , (3.16)
, (3.16)
которое
отражает очень важное свойство ДПТ:
относительный перепад скорости ДПТ  равен относительному активному
сопротивлению цепи якоряR/Rном.
Отметим, забегая вперед, что это свойство
характерно и для других типов двигателей,
в частности асинхронных. Пропорцию
(3.16) удобно решать графически, для чего
обратимся к рис. 3.6. Обозначим на нем
характерные точкиа,b,
с, dи отметим, что
равен относительному активному
сопротивлению цепи якоряR/Rном.
Отметим, забегая вперед, что это свойство
характерно и для других типов двигателей,
в частности асинхронных. Пропорцию
(3.16) удобно решать графически, для чего
обратимся к рис. 3.6. Обозначим на нем
характерные точкиа,b,
с, dи отметим, что  ;
; .
Тогда
.
Тогда
 ; (3.17)
; (3.17)
 ; (3.18)
; (3.18)
 . (3.19)
. (3.19)
Таким образом, для нахождения Rд следует по характеристикам определить
длины отрезковbcиadпри номинальном токе, рассчитать
номинальное сопротивление и затем воспользоваться формулой (3.18).
Этот же порядок расчета сохраняется
тогда, когда исходными являются
механические характеристики ДПТ. В этом
случае длины отрезков определяются при
номинальном моменте.
и затем воспользоваться формулой (3.18).
Этот же порядок расчета сохраняется
тогда, когда исходными являются
механические характеристики ДПТ. В этом
случае длины отрезков определяются при
номинальном моменте.
Данный метод справедлив также и при расчете резисторов в схеме динамического торможения. Опуская вывод, который может быть сделан аналогичным образом, приведем окончательную формулу для расчета Rд,т,обеспечивающего характеристику динамического торможения вида2 на рис. 3.6,
 . (3.20)
. (3.20)
Отметим, что характеристика 3 на этом рисунке соответствует Rд,т=0 и располагается параллельно естественной характеристике.
Метод пропорций. При применении этого метода используется выражение для перепада скорости на характеристиках ДПТ. Если согласно (3.6) записать выражения дляна естественной и искусственной электромеханической или механической характеристике при одном и том же токеIiили моментеМi(рис. 3.6), а затем найти их отношение, то получится следующая пропорция:
 . (3.21)
. (3.21)
Определяя из (3.21) Rд,получаем формулу для расчетаRдметодом пропорций
 (3.22)
(3.22)
Значения eиинаходятся, как и ранее, по характеристикам рис. 3.6.
При расчетах регулировочных резисторов в цепях якоря ДПТ независимого возбуждения необходимо знать собственное сопротивление якоря ДПТ Rя. Назовем возможные способы его нахождения.
1.Некоторые заводы-изготовители приводят в каталогах значениеRя.
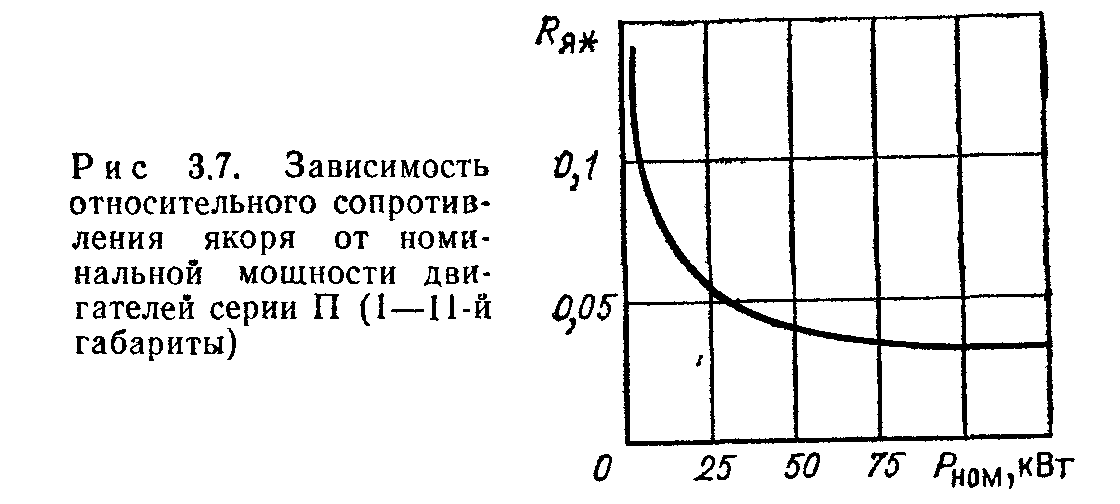
2.В справочной литературе
по электрическим машинам, например
[41], даются обобщенные зависимости
относительного сопротивления якоря от мощностиРномдля ДПТ
некоторых серий. Для примера на рис. 3.7
приведена эта зависимость для ДПТ серии
Л (1–11-й габариты).
от мощностиРномдля ДПТ
некоторых серий. Для примера на рис. 3.7
приведена эта зависимость для ДПТ серии
Л (1–11-й габариты).
3.При наличии ДПТ сопротивлениеRяможет быть определено экспериментально, путем непосредственного измерения его между щетками ДПТ
4.При невозможности воспользоваться указанными выше способами может быть применена следующая приближенная формула для определенияRяпо номинальным паспортным данным ДПТ:
 (3.23)
(3.23)
где ном– номинальный КПД двигателя.
5.При наличии экспериментально снятой электромеханической или механической характеристики ДПТ значениеRяможет быть определено по методу отрезков с помощью формулы (3.19).
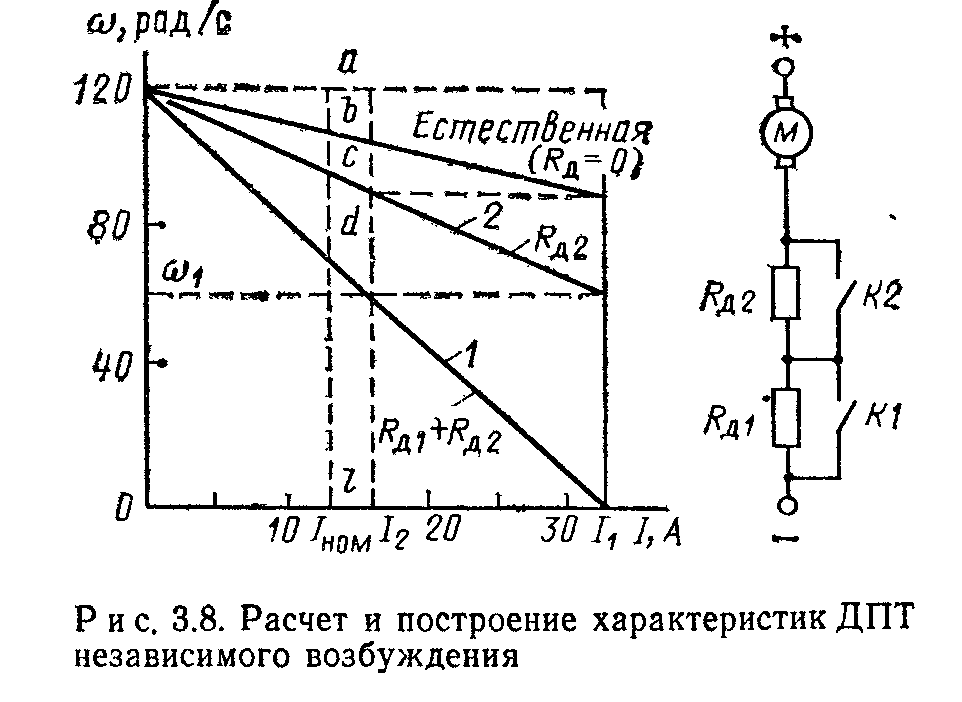
Пример 3.1.Рассчитать и построить естественные электромеханическую и механическую характеристики ДПТ, имеющего следующие паспортные данные:Рном=2,2 кВт;Uном=220 В;Iном=13 А;nном=1000 об/мин;ном=77 %;Iв,ном=0,73 А;Rо,в=300 Ом.
Для построения искомых характеристик, которые представляют собой прямые линии, достаточно определить координаты двух точек: номинального режима и холостого хода
1.Для точки номинального режима определяем номинальную угловую скорость

номинальный момент

номинальное сопротивление ДПТ

2.Далее по приближенной формуле (3.23) находим сопротивление якорной цепи

3.Используя (34), определяем
значение

4.Скорость идеального холостого хода согласно (3.6а) равна

5.По координатам точек холостого хода (0, 0) и номинального режима (ном,Iном) на рис 38 построена естественная электромеханическая характеристика ДПТ независимого возбуждения Естественная механическая характеристика также может быть построена по этим же двум точкам
Пример 3.2.Расчитать и построить для ДПТ (см. пример 3 1) пусковую диаграмму при использовании двух ступеней пускового резистора.
Построение пусковой диаграммы ДПТ осуществляется в следующем порядке.
1.Рассчитывается максимально допустимый при пуске токI1=Iдоп. Для рассматриваемого примера примем

2.Определяется ток переключения I2,значение которого можно получить двумя путями;
а) подбором с таким расчетом, чтобы число искусственных характеристик равнялось двум, а ток в переходном процессе не превосходил Iдоп;
б) расчетом с помощью следующей формулы, которая приводится без вывода:
 (3.24)
(3.24)
где т –число заданных ступеней пускового резистора.
Методом подбора из рис. 3.8 находим I2=16
А. Отметим, что если пуск ДПТ осуществляется
под нагрузкой, то токI2должен на 10–20 % превосходить ток нагрузкиIс, т. е. должно
соблюдаться равенство: 
3.С помощью метода отрезков определяем сопротивление ступеней пускового резистора
Искусственная характеристика Iна рис. 3.8 соответствует наличию в цепи якоря обеих ступеней пускового резистораRд1+Rд2, а характеристика2–второй ступениRд2. На рис. 3.8 изображена также схема якорной цепи двигателя при реализации этой пусковой диаграммы.
Параметрическое регулирование скорости двигателя постоянного тока.
 .
.
Реостатное регулирование.
Реостатный способ регулирования осуществляется путем изменения активного сопротивления резистора, включенного в цепь якоря двигателя. Переключение степеней резистора, в зависимости от мощности двигателя, производится или плоским контроллером или силовыми контакторами.
1 способ. Используется для двигателей малой мощности. Число степеней большое, коэффициент плавности больше единицы w1.
Для двигателей большой мощности используется 2 способ, он более дорогостоящий, поэтому число степеней небольшое и коэффициент плавности значительно отличается от единицы.
Для всех типов электродвигателей регулирование скорости осуществляется вниз от основной номинальной скорости. При этом жесткость механической характеристики уменьшается. При снижении скорости потери электрической энергии растут, допустимый момент нагрузки остается практически постоянным.
Механические характеристики для двигателя постоянного тока независимого возбуждения при реостатном регулировании производятся при постоянном потоке и линейны. Ф=const. Если принять за допустимый момент по нагреву номинальный токI=Iн,Ф=Фн,Мдоп=КФнIян=Мн, т.е. момент не изменен от скорости, если принять что двигатель обдуваемый.
Достоинством реостатного регулирования является его простота, все искусственные механические характеристики лежат ниже естественных механических характеристик. Зависимость момента от вводимого в цепи якоря сопротивления линейно.
 .
.
weo(M)– скорость двигателя на естественной характеристике при заданном моменте.
 — падение скорости двигателя за счет
введения дополнительного сопротивления
в цепь якоря.
— падение скорости двигателя за счет
введения дополнительного сопротивления
в цепь якоря.
 — падение скорости двигателя за счет
введения дополнительного сопротивления
в цепь якоря.
— падение скорости двигателя за счет
введения дополнительного сопротивления
в цепь якоря.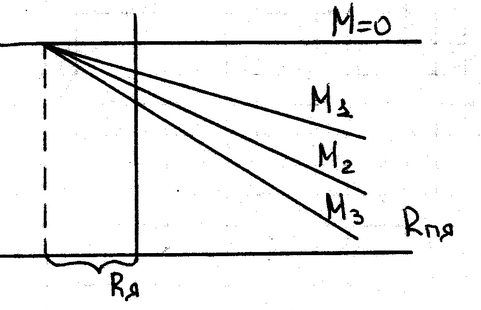
Анализ выражения wот введения сопротивления показывает, что при малых моментах регулирования скорости не эффективно.
Со снижением скорости при реостатном регулировании уменьшает жесткость механических характеристик, при реостатном регулировании также мал диапазон регулирования скорости.
 ;
; .
.
Диапазон
регулирования  .
.
 ;
;
 ;
; ;
;
 .
.
В практике часто вместо значения минимальной жесткости характеристики задают наибольшее отклонение момента статической нагрузки Мс=(0,5÷1)Мн.
 ;
; .
.
 ;
;
Rя=0,04÷0,24;Д=2÷2,5;Мс=0,5÷1.
КПД средний:
 ;
; .
.
Для двигателей смешанного и последовательного возбуждения зависимость момента от ведения в цепи якоря дополнительного сопротивления, как и для двигателей постоянного тока с независимым возбуждением, имеет линейный характер
 .
.
Регулирование скорости двигателя постоянного тока независимого возбуждения изменением потока возбуждения.
Из выражения механической характеристики просматривается, что регулирование скорости возможно изменением магнитного потока двигателя. Поток следует изменять лишь в сторону уменьшения от номинального значения, так как по условиям нагрева, он не должен превышать длительностью его номинальное значение. Кроме этого у многих машин постоянного тока при изменении магнитного потока выше номинального наступает насыщение магнитной цепи машины, т.е. этот способ регулирования скорости производится ослаблением поля двигателя.
Основным достоинством этого способа регулирования является, то что регулирование скорости реализуется за счет изменения режима работы в цепи относительно малой мощности. Кроме этого достоинством способа являются малые потери равные потерям при работе двигателя на естественной характеристике. Регулирование тока возбуждения производится или введением сопротивления в цепь обмотки возбуждения или за счет подключения обмотки возбуждения к регулируемому источнику питания.
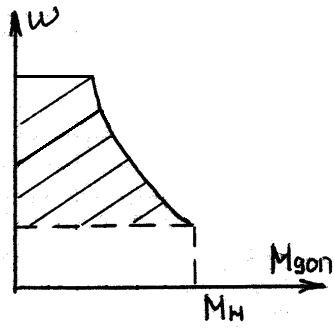
Допустимый момент на валу двигателя I=Iн;М=КФIн.
 ;
; ;
; ;
;
 .
.
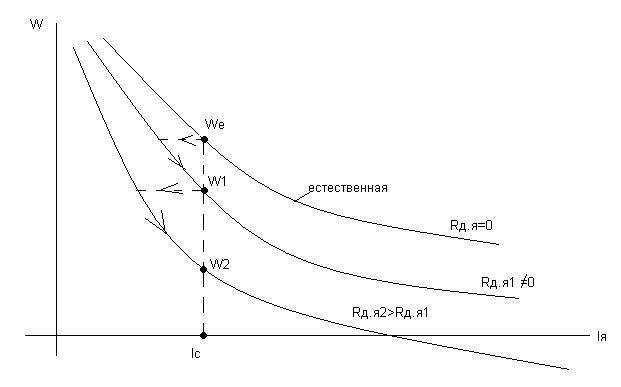
При
этом способе регулирования, из анализа
механической характеристики, можно
видеть  ,
что скорость идеального холостого хода
,
что скорость идеального холостого хода растет, ток короткого замыкания остается
постоянным
растет, ток короткого замыкания остается
постоянным .
Момент короткого замыканияМкз=KФIкзменяется, жесткость
.
Момент короткого замыканияМкз=KФIкзменяется, жесткость .
.
Скорости механической характеристики
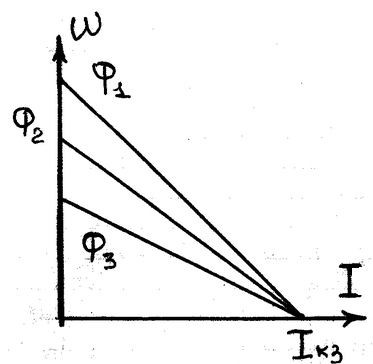 Ф1<Ф2<Ф3;
Ф1<Ф2<Ф3;
Основные показатели регулирования скорости электродвигателей. Способы регулирования скорости электродвигателей постоянного тока последовательного возбуждения.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования:
это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
 это соотношение
это соотношение к
к ,
при которых работа привода при
существующих нагрузках будет устойчивой;
,
при которых работа привода при
существующих нагрузках будет устойчивой;Регулировать скорость двигателей постоянного тока последовательного возбуждения возможно изменением подводимого напряжения и изменением сопротивления якорной цепи.
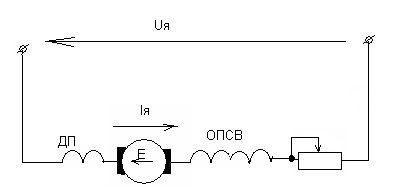
Р
егулирование
скорости изменением сопротивления
якорной цепи.
 егулирование
скорости изменением сопротивления
якорной цепи.
егулирование
скорости изменением сопротивления
якорной цепи. 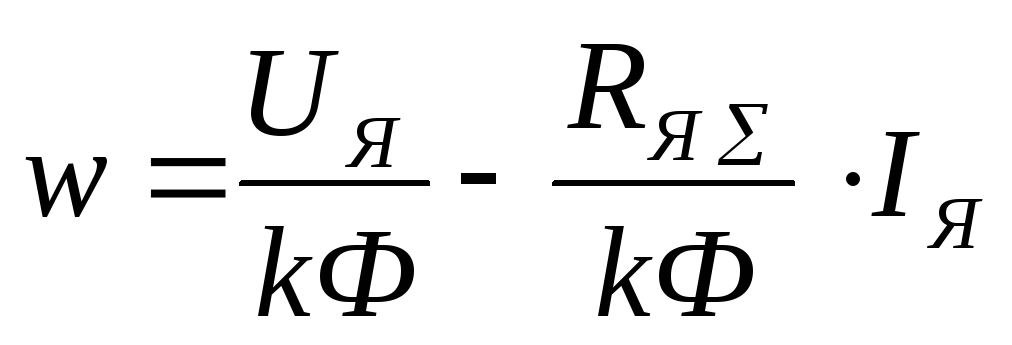
Введение RД.Яв цепь уменьшает жесткость характеристики и ограничиваетIЯ.
Все вышесказанное про данный способ регулирования применительно к двигателям постоянного тока независимого возбуждения, в полной мере относится и к двигателям постоянного тока последовательного возбуждения.
Регулирование скорости изменением подводимого напряжения.
Все вышесказанное про данный способ регулирования применительно к двигателям постоянного тока независимого возбуждения, в полной мере относится и к двигателям постоянного тока последовательного возбуждения.
Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (rдт, rп).
Расчет производится для режимов динамического торможения и противовключения.
Режим противовключения.
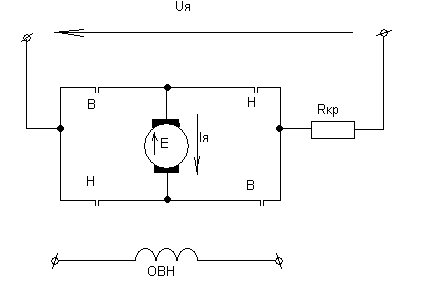
При переключении «В» на «Н» изменится направление IЯ, и следовательно направление момента

Для ограничения тока якоря вводится RКР.
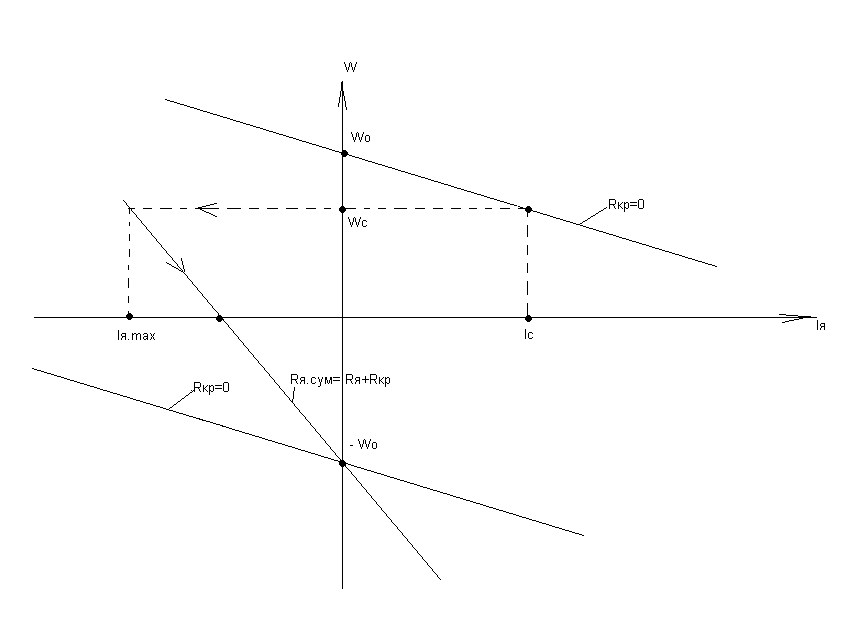
При этом бросок IЯограничен значениемIЯ.max.RКРопределяется из:
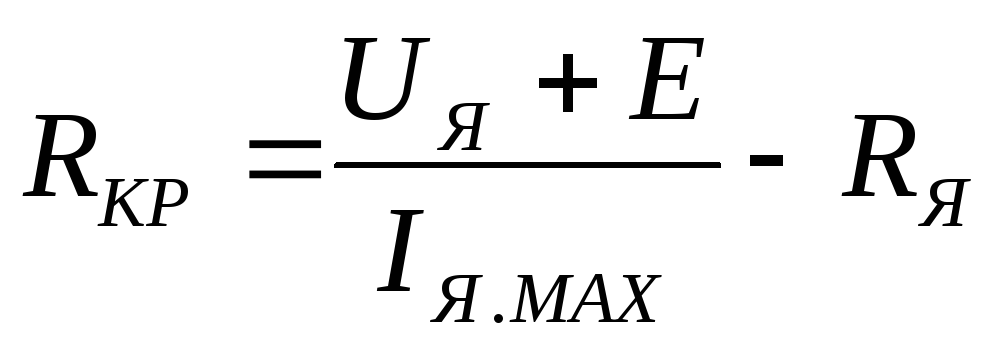 .
.
Ток якоря ограничивается на уровне 2,5 от номинального.
Динамическое торможение.
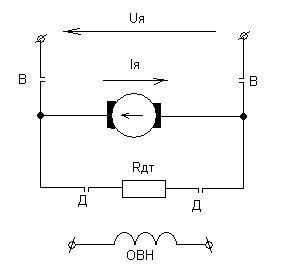
В режиме динамического торможения
электродвигатель отключается от сети
и его якорные зажимы замыкаются на RД.Т.
В этом режиме кинетическая энергия
механизма и двигателя расходуется на
его нагрев. При отключении двигателя
от сети и включении «Д» двигатель по
инерции продолжает вращаться в ту же
сторону, ноIЯменяет
свое направление, т.к. источником
становится двигатель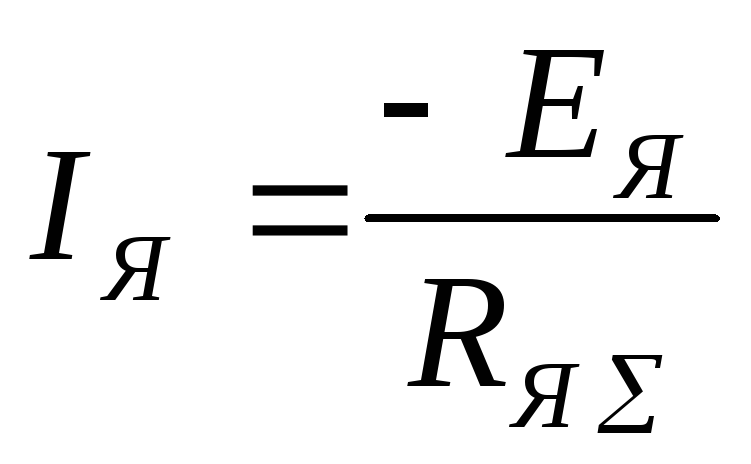 .
.
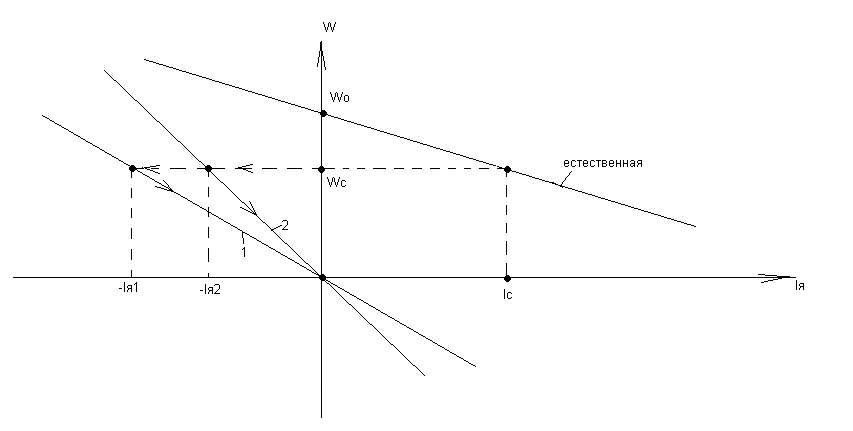
Очевидно, что при  торможение будет происходить более
интенсивно, но т.к. существует ограничение
наIЯ.max,
то
торможение будет происходить более
интенсивно, но т.к. существует ограничение
наIЯ.max,
то рассчитывается из:
рассчитывается из:
 .
.
Расчет пусковых сопротивлений в приводах с двигателями постоянного тока последовательного возбуждения.
Схема пуска двигателя:
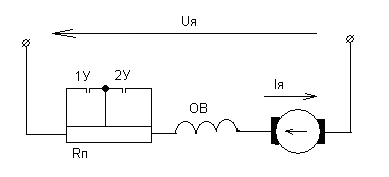
Пуск производится в три этапа:
RП(1У и 2У разомкнуты)
 ;
;
1У замкнут – RП1
 ;
;
2У замкнут – RП=0
 .
.
Расчет пусковых сопротивлений (расчет механической характеристики) можно произвести аналитически (аналогично расчету пусковых сопротивлений двигателей постоянного тока независимого возбуждения).
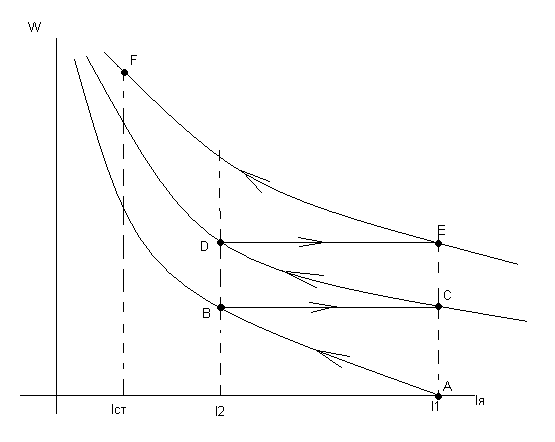
Также расчет можно произвести графоаналитическим методом.
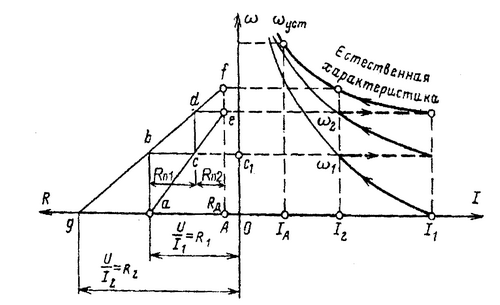
Расстояние ОА соответствует внутреннему сопротивлению двигателя. Откладываем в том же масштабе отрезки Оа=R1=U/I1иOg=R2=U/I2.
Соединяя точки аие, а такжеgиf, получаем две прямые, характеризующие линейную зависимость между скоростью двигателя и сопротивлением его якорной цепи при неизменном токе якоря.
Для того чтобы определить число пусковых ступеней и их сопротивление, необходимо провести вертикальную черту через адо пересечения сgfв точкеb. Затем провести через точкуbлинию, параллельную оси абсцисс, до точкисна линииае. Аналогично провести линииcdи de.
Отрезок bссоответствует первой ступени реостата, аde– второй.
Регулирование скорости электроприводов.
Для обеспечения рационального хода технологических процессов обеспечили наиболее эффективное использование производственных механизмов и оптимизировали режимы их работы, уменьшили потребление электрической энергии, применением регулирования скорости движения механизмов.
Для регулирования скорости движения рабочего органа существуют две возможности:
Изменение угловой скорости двигателя.
Изменение передаточного числа механических передач, установленных между двигателем и механизмом.
При регулировании скорости механическим способом отсутствует плавность регулирования, да и техническая реализация регулирования относительно сложна и не надежна. В настоящее время в подавляющем большинстве случаев регулирование скорости рабочего органа производится путем изменения скорости электродвигателей, работающих в регулируемом электроприводе.
Под регулированием скорости электродвигателя понимаем – целенаправленное ее изменение независимо от момента на валу двигателя в соответствии с требованиями, которые предъявляются к закону движения рабочего органа механизма. Иными словами это принудительное управление системой скорости, исходя их требований технологического процесса при подаче управляющего сигнала на вход системы.
Под регулируемым электроприводом понимаем – электропривод, обеспечивающий плавное с необходимой точностью регулирование координат скорости и момента в заданном диапазоне.
В естественной схеме включения двигатель не может обеспечить регулирования параметров движения. Поэтому для создания регулируемого электропривода необходим преобразователь электрической энергии. Регулируемые параметры преобразования энергии (напряжение, частота, форма тока, напряжения) удается получить для привода с заданными статическими и динамическими характеристиками. Применение регулируемого электропривода в составе технологических машин и агрегатах связано с одним из следующих обстоятельств:
Необходимо оперативное управление ходом технологического процесса (электроприводов кранов, прокатных станов).
Необходимо установить и точно выдерживать технологический режим (непрерывные прокатные станы, бумагоделательные машины).
Необходимость корректировки технологического процесса (питатели, дозаторы).
Автоматическое управление режимом обработки материала (станки с ЧПУ).
Необходимо оптимизировать технологический процесс по затратам электрической энергии (электропривода насосов, компрессоров, вентиляторов).
Способы изменения углов скорости двигателя следуют из анализа механических характеристик двигателя:
 — двигатель постоянного тока;
— двигатель постоянного тока;
 — двигатель переменного тока.
— двигатель переменного тока.
 .
.
Анализ этих формул показывает, что угловая скорость двигателя может изменяться, как изменением параметров силовой электрической цепи привода, числом пар полюсов цепи статора и т.д. и изменением магнитного потока, а также изменением параметров источника питания.
Регулирование скорости также возможно изменением момента сопротивления. Этот способ не применим, так как изменение момента вызывает отклонение регулируемой величины от заданного значения. Способы регулирования скорости электропривода связаные с изменением параметров электрических цепей двигателя называют параметрическим. Также различают непрерывный способ регулирования и импульсный способ регулирования. Под непрерывным способом регулирования понимают регулирование, когда регулируемые параметры или значения напряжения и частоты остаются постоянными для данного значения скорости. При импульсном регулировании регулируемые параметры цепи или источника питания периодически изменяются, отклоняясь от заданного значения.
Свойства регулирования электропривода оцениваются следующими показателями:
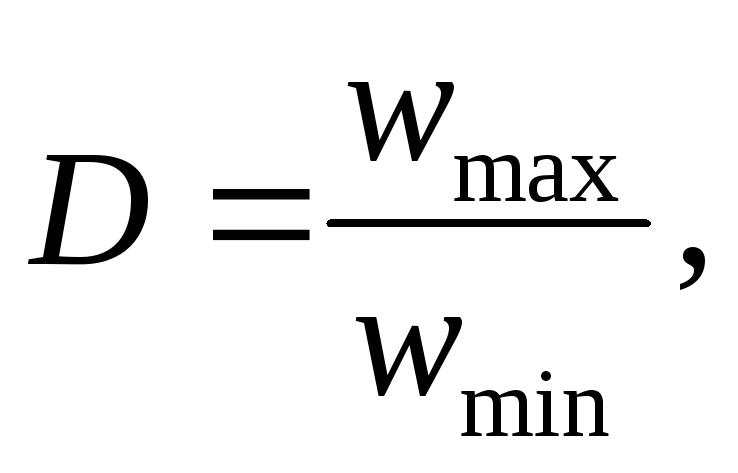
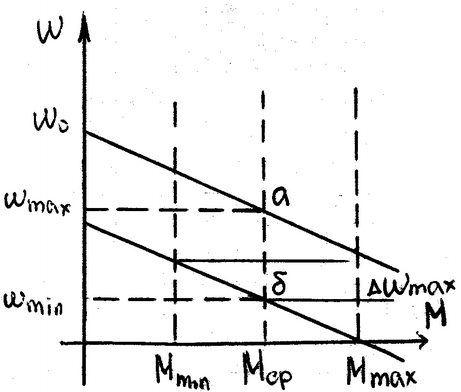
Диапазон регулирования скорости, под которым понимают отношение максимальной скорости к минимальной при заданном пределе изменения момента
.
 .
.Увеличение верхнего предела скорости ограниченно механической прочностью ротора или якоря двигателя, а для двигателя постоянного тока кроме этого верхний предел ограничивает коммутационную способность коллектора.
Нижний предел угловой скорости ограничивается необходимой точностью поддержания заданной скорости при возможности изменения момента статической нагрузки на валу двигателя.
Диапазон регулирования определяется отношением максимальной скорости к минимальной, которая определяется по среднему значению из заданного максимального и минимального его значений, т.е.
 .
.
 ;
; ;
; ;
; ;
; .
.
Вторым важным показателем регулирования скорости является точность регулирования.
Абсолютная статическая ошибка регулирования электропривода будет определятся как падение скорости
 .
.
Абсолютная ошибка одинакова для всех механических характеристик, т.е. постоянна во всем диапазоне регулирования. Относительная величина ошибки переменная, различна для всех механических характеристик. Она находится как отношение абсолютной ошибки к заданной скорости
 .
.
Нижний предел скорости wmin может ограничиваться заданной требуемой точностью и условие выполнения заданной точности:
 ;
; .
.
Плавность регулирования, которая характеризуется разностью двух последовательных значений скорости, которые представляют из себя ступени регулирования и, чем меньше эта разность, тем плавнее осуществляется регулирование скорости. Часто плавность характеризуется коэффициентом плавности регулирования, под которым понимают отношения двух степеней скоростей
 .
.
Наиболее плавное регулирование имеет место при коэффициенте плавности стремящимуся к единице w1. Такой результат возможен при регулировании скорости изменением напряжения и изменением частоты асинхронного двигателя.
При параметрическом регулировании плавности изменения скорости зависит от мощности двигателя, так как изменение параметров в силовой цепи связано с коммутационной аппаратурой и, для этих приводов большой и средней мощности, ее число должно быть ограничено.
Экономичность регулирования, которая будет тем выше чем меньше, первоначальные затраты необходимые для установки оборудования и эксплуатационные затраты. Эксплуатационные затраты оцениваются косвенным способом по величинам КПД и коэффициенту мощности.
Направление, в котором регулируется скорость, т.е. увеличение или уменьшение ее по отношению к номинальной скорости напрямую зависит от способа регулирования. При реостатном регулировании у двигателей постоянного тока или асинхронного двигателя с фазным ротором, регулирование осуществляется вниз от основной.
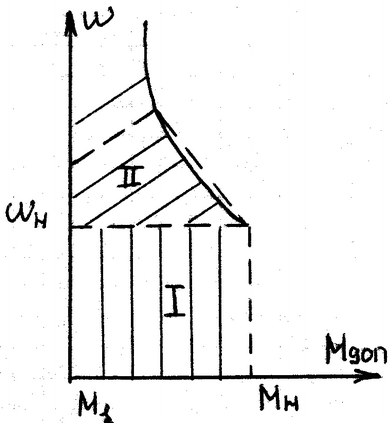
Допустимая нагрузка двигателя определяется нагревом обмоток двигателя. Условием полного использования электродвигателя является равенство тока двигателя номинальному. При различных характеристиках зависимости момента сопротивления и мощности механизмов от скорости, необходимо применение таких методов регулирования, при которых эквивалентный момент двигателя по нагреву при изменении скорости будет меняться по такому же закону, как и статический момент. Например, двигатель постоянного тока, если статический момент во всем диапазоне рабочей скорости постоянен, то надо применить метод регулирования вниз от номинальной скорости – это реостатный способ регулирования.
Если регулирование идет при постоянной мощности механизма, то регулирование идет вверх от номинальной скорости – изменением током возбуждения двигателя.
Для определения допустимой мощности следует найти его величину соответствующую номинальному току главной цепи.
I – М=const; II – F-const.