


Способы регулирования частоты вращения электродвигателей постоянного тока
2.1. Основные сведения
Рассмотрим способы регулирования частоты вращения электродвигателей постоянного тока на примере электродвигателя с независимым ( параллельным ) возбуждением.
Уравнение естественной механической характеристики двигателя имеет вид
ω
=  –
–  ,
(13-2)
,
(13-2)
где: ω – угловая скорость якоря;
U – напряжение на обмотке якоря;
k – постоянный коэффициент;
Ф – магнитный проток обмотки ( обмоток ) возбуждения;
М – электромагнитный момент электродвигателя;
R
Из уравнения (13-2) следует, что скорость двигателей с независимым (параллельным) возбуждением можно регулировать тремя способами:
1. изменением напряжения на обмотке якоря двигателя –U;
2
изменением сопротивления цепи обмотки
якоря –R ;
;
3. изменением магнитного потока полюсов –Ф.
Первый способ регулирования – изменением напряжения на обмотке якоря, применяется только для двигателей с независимым возбуждением в «системах генератор – двигатель».
Второй способ – изменением сопротивления цепи обмотки якоря
Этот способ позволяет изменить скорость двигателя только вниз от основной, причем с увеличением сопротивлений скорость двигателя уменьшается. Это объясняется увеличением падения напряжения в добавочных резисторах и уменьшением напряжения на зажимах якоря.
Положительное качество данного способа регулирования –простота, т.к. он осуществляется путем введения (выведения) ступеней регулировочного реостата в цепь обмотки якоря двигателя.
Основным недостатком способа является большой расход энергии в добавочных резисторах.
Этот способ применяется в электроприводах грузоподъемных механизмов и якорно–швартовных устройств на постоянном токе.
Третий способ – изменением магнитного потока полюсов, на практике осуществляется путем введения добавочных резисторов последовательно с параллельной обмоткой возбуждения. При этом магнитный поток возбуждения уменьшается, а скорость якоря увеличивается.
Скорость двигателей, специально сконструированных для работы с регулируемым потоком, может превышать номинальную в три раза и более, скорость остальных двигателей повышается на 10 – 20 %. Верхний предел скорости ограничен условиями коммутации, механической прочности или температурой нагрева двигателя.
Положительное качество
Основными недостатками способа являются возможность регулирования скорости только вверх от номинальной, а также увеличение тока якоря во столько раз, во сколько раз ослаблен магнитный поток.
Последняя особенность не позволяет применять этот способ регулирования при работе электропривода с номинальным моментом, т.к. при ослаблении потока ток якоря превысит номинальный, что недопустимо.
Поэтому этот способ регулирования применяется в электроприводах грузоподъемных механизмов и якорно –швартовных устройств для получения высоких скоростей при перемещения холостого гака (грузовые лебедки и краны) или швартовного каната (брашпили, шпили), т.е. при небольшой нагрузке на валу электродвигателя.
Вопрос 15. Регулирование частоты вращения двигателей постоянного тока различными способами. Схемы регулирования частоты вращения.
Регулировать частоту вращения двигателя параллельного возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря.
Введение
дополнительного сопротивления в цепь
якоря. Дополнительное
сопротивление (реостат 
 возрастает
возрастает  ,
что ведет к уменьшению частоты
вращения. Этот
способ обеспечивает
плавное регулирование частоты вращения
в широком диапазоне
(только в сторону уменьшения частоты
от номинальной), однако
он неэкономичен из-за значительных
потерь электроэнергии в
регулировочном реостате
,
что ведет к уменьшению частоты
вращения. Этот
способ обеспечивает
плавное регулирование частоты вращения
в широком диапазоне
(только в сторону уменьшения частоты
от номинальной), однако
он неэкономичен из-за значительных
потерь электроэнергии в
регулировочном реостате 
Изменение
основного магнитного потока. Этот способ регулирования
в двигателе параллельного возбуждения
реализуется посредством
реостата  в цепи обмотки возбуждения. Так,
при уменьшении сопротивления реостата
возрастает магнитный
поток обмотки возбуждения, что
сопровождается понижением
частоты вращения. При увеличении
в цепи обмотки возбуждения. Так,
при уменьшении сопротивления реостата
возрастает магнитный
поток обмотки возбуждения, что
сопровождается понижением
частоты вращения. При увеличении  частота
вращения растет. Недостаток рассмотренного
способа регулирования частоты вращения
состоит в том, что при изменении магнитного
потока
частота
вращения растет. Недостаток рассмотренного
способа регулирования частоты вращения
состоит в том, что при изменении магнитного
потока
 ,
а поэтому потери в регулировочном
реостате
,
а поэтому потери в регулировочном
реостате  невелики.
невелики. Изменение
напряжения в цепи якоря. Регулирование
частоты
вращения двигателя изменением питающего
напряжения применяется лишь при 
Импульсное
регулирование частоты вращения. Цепь
обмотки якоря двигателя параллельного
возбуждения периодически прерывается
ключом К. Во
время замыкания цепи якоря на время 
 и ток в ней достигает значения
и ток в ней достигает значения  .
Затем ключом К цепь
якоря размыкают и ток в ней убывает,
достигая
к моменту следующего замыкания цепи
значения
.
Затем ключом К цепь
якоря размыкают и ток в ней убывает,
достигая
к моменту следующего замыкания цепи
значения  (при
размыкании ключа К ток
в обмотке якоря замыкается через диод VD).
При следующем замыкании ключа К ток
достигает значения
(при
размыкании ключа К ток
в обмотке якоря замыкается через диод VD).
При следующем замыкании ключа К ток
достигает значения 
Частоту
вращения двигателей последовательного
возбуждения можно
регулировать изменением либо напряжения  ,
либо магнитного
потока обмотки возбуждения. В первом
случае в цепь якоря
последовательно включают регулировочный
реостат
,
либо магнитного
потока обмотки возбуждения. В первом
случае в цепь якоря
последовательно включают регулировочный
реостат  (рис.
29.10, а). С
увеличением сопротивления этого реостата
уменьшаются напряжение на входе двигателя
и частота его вращения.
Этот метод регулирования применяют
главным образом в двигателях
небольшой мощности. В случае значительной
мощности двигателя этот способ
неэкономичен из-за больших потерь
энергии
в
(рис.
29.10, а). С
увеличением сопротивления этого реостата
уменьшаются напряжение на входе двигателя
и частота его вращения.
Этот метод регулирования применяют
главным образом в двигателях
небольшой мощности. В случае значительной
мощности двигателя этот способ
неэкономичен из-за больших потерь
энергии
в 
 , рассчитываемый
на рабочий ток
двигателя, получается громоздким и
дорогостоящим.
, рассчитываемый
на рабочий ток
двигателя, получается громоздким и
дорогостоящим. Регулировать
частоту вращения двигателя изменением
магнитного
потока можно тремя способами: шунтированием
обмотки возбуждения
реостатом 
 . Включение
реостата
. Включение
реостата  ,
шунтирующего обмотку возбуждения (рис.
29.10, в),
а также
уменьшение сопротивления этого реостата
ведет к снижению
тока возбуждения
,
шунтирующего обмотку возбуждения (рис.
29.10, в),
а также
уменьшение сопротивления этого реостата
ведет к снижению
тока возбуждения  ,
а следовательно, к росту частоты вращения.
Этот способ экономичнее предыдущего
(см. рис. 29.10, а), применяется
чаще и оценивается коэффициентом
регулирования
,
а следовательно, к росту частоты вращения.
Этот способ экономичнее предыдущего
(см. рис. 29.10, а), применяется
чаще и оценивается коэффициентом
регулирования  .
Обычно
сопротивление реостата
.
Обычно
сопротивление реостата  принимается таким, чтобы
принимается таким, чтобы  .
При
секционировании обмотки возбуждения
(рис. 29.10, г)
отключение части витков обмотки
сопровождается ростом частоты
вращения. При шунтировании
обмотки якоря реостатом
.
При
секционировании обмотки возбуждения
(рис. 29.10, г)
отключение части витков обмотки
сопровождается ростом частоты
вращения. При шунтировании
обмотки якоря реостатом  (см.
рис. 29.10, в)
увеличивается ток возбуждения
(см.
рис. 29.10, в)
увеличивается ток возбуждения  ,
что вызывает уменьшение частоты
вращения. Этот способ
регулирования, хотя и обеспечивает
глубокую
регулировку, неэкономичен
и применяется очень редко.
,
что вызывает уменьшение частоты
вращения. Этот способ
регулирования, хотя и обеспечивает
глубокую
регулировку, неэкономичен
и применяется очень редко.Регулировать частоту вращения двигателя смешанного возбуждения можно реостатом в цепи параллельной обмотки возбуждения. Однако наличие двух обмоток возбуждения делает двигатель смешанного возбуждения более дорогостоящим по сравнению с двигателями рассмотренных выше типов, что несколько ограничивает его применение.
Московский государственный технический университет
8
ГРАЖДАНСКОЙ АВИАЦИИ
ИРКУТСКИЙ ФИЛИАЛ
КАФЕДРА АВИАЦИОННЫХ ЭЛЕКТРОСИСТЕМ
И ПИЛОТАЖНО-НАВИГАЦИОННЫХ КОМПЛЕКСОВ
ЛЕКЦИЯ №6
по дисциплине
Электрические машины
для студентов специальности 160903
ТЕМА №4
Генераторы и двигатели постоянного тока
СОДЕРЖАНИЕ
Пуск, торможение, регулирование частоты вращения двигателей постоянного тока.
Потери, КПД, нагрев и охлаждение электрических машин постоянного тока.
ЛИТЕРАТУРА
Копылов Б.В. Электрические машины. М., 1988 г.
НАГЛЯДНЫЕ ПОСОБИЯ, ПРИЛОЖЕНИЯ, ТСО
Мультимедийная установка
Иркутск, 2011 г.
1. Пуск, торможение, регулирование частоты
вращения двигателей постоянного тока
Двигатели постоянного тока позволяют осуществить плавное и экономичное регулирование частоты вращения в широком диапазоне. Поэтому они получили большое распространение в регулируемом электроприводе.
Свойства двигателей постоянного тока во многом определяются способом их возбуждения. Как и генераторы, двигатели постоянного тока выполняются с независимым, параллельным, смешанным и последовательным возбуждением.
В двигательном
режиме ток якоря  и электромагнитный момент
и электромагнитный момент меняют знак по сравнению с генераторным
режимом, но для удобства анализа их
принимают положительными, поэтому
уравнения напряжений и моментов
записывают в виде
меняют знак по сравнению с генераторным
режимом, но для удобства анализа их
принимают положительными, поэтому
уравнения напряжений и моментов
записывают в виде
 (6.1)
(6.1)
Уравнения (6.1)
совместно с выражениями для ЭДС  и для электромагнитного момента
и для электромагнитного момента позволяют выполнить анализ основных
рабочих режимов двигателей постоянного
тока.
позволяют выполнить анализ основных
рабочих режимов двигателей постоянного
тока.
Пуск двигателей постоянного тока
Существует три способа пуска двигателей постоянного тока:
— прямой пуск;
— пуск с помощью пускового реостата;
— пуск от источника регулируемого напряжения.
Прямой пуск от
сети применяется иногда для двигателей
мощностью до 1 кВт,
пусковой ток которых не превышает  .
В начальный момент прямого пуска при
.
В начальный момент прямого пуска при и
и пусковой ток определяется напряжением
сети и внутренним сопротивлением якоря
пусковой ток определяется напряжением
сети и внутренним сопротивлением якоря .
.
В машинах средней
и большой мощности сопротивление  небольшое, поэтому ток при пуске может
достигать
небольшое, поэтому ток при пуске может
достигать .
Такие токи недопустимы по условиям
коммутации и могут вызвать “круговой
огонь” на коллекторе.
.
Такие токи недопустимы по условиям
коммутации и могут вызвать “круговой
огонь” на коллекторе.
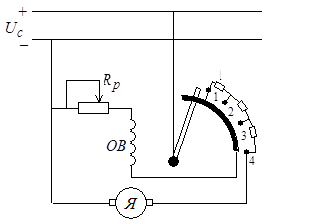
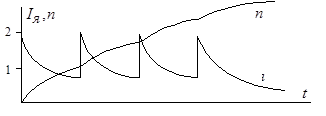
Рис. 1
Для снижения пусковых токов подключение двигателей средней и большой мощности к сети осуществляется через пусковой реостат (рис.1). В первый момент пуска подвижный контакт реостата устанавливается на клемму 1, и в цепь якоря вводится полное сопротивление реостата
 ,
,
а обмотка возбуждения
включается в сеть, минуя пусковой
реостат. Сопротивление  подбирается так, чтобы пусковой ток
подбирается так, чтобы пусковой ток
не превышал  .
.
По мере разгона двигателя пусковой реостат выводится. В конце пуска подвижный контакт соединяется с клеммой 4 и якорь подключается к сети напрямую. Сопротивление пускового реостата изменяется ступенями, поэтому ток якоря при пуске пульсирует согласно выражению
 .
.
Такой же характер имеет и кривая электромагнитного момента
 .
.
Для повышения
электромагнитного момента при заданном
пусковом токе и сокращения времени
пуска необходимо стремиться к тому,
чтобы поток Ф был максимален. Это условие выполняется
при полностью выведенном регулировочном
реостате ( ).
).
Наиболее благоприятные пусковые характеристики могут быть получены при пуске двигателя от источника регулируемого напряжения. В качестве источника регулируемого напряжения используются либо генератор постоянного тока (рис. 2, а), либо полупроводниковый выпрямитель (рис. 2, б).
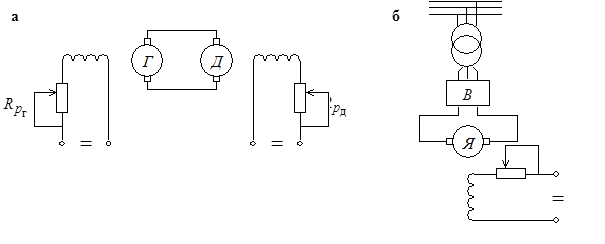 Рис.
2
Рис.
2
Такие схемы применяются одновременно и для регулирования частоты вращения двигателя, так как только в этом случае высокая стоимость источника питания окупается за счет эффекта от регулирования частоты вращения.
Регулирование частоты вращения | Электрические машины
Страница 51 из 51
6.7.3. Регулирование частоты вращения двигателей постоянного тока
|

|

Согласно (6.8), регулирование частоты вращения двигателей постоянного тока можно осуществлять путем изменения потока Ф, введения дополнительного сопротивления  в цепь якоря и изменения напряжения сети
в цепь якоря и изменения напряжения сети  . В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата
. В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата  в цепи возбуждения. При увеличении сопротивления
в цепи возбуждения. При увеличении сопротивления  поток Ф уменьшается и частота вращения растет. На рис. 6.43 представлены механические характеристики двигателя параллельного возбуждения при трех значениях потока. Таким способом регулируют частоту вращения в пределах
поток Ф уменьшается и частота вращения растет. На рис. 6.43 представлены механические характеристики двигателя параллельного возбуждения при трех значениях потока. Таким способом регулируют частоту вращения в пределах  ,
,  . Верхний уровень частот ограничивается условиями коммутации. Кроме того, при глубоком уменьшении потока возбуждения усиливается размагничивающее действие реакции якоря, жесткость механической характеристики растет, и падающая характеристика при номинальном потоке может стать возрастающей при ослабленном потоке, что приведет к нарушению устойчивой работы двигателя.
. Верхний уровень частот ограничивается условиями коммутации. Кроме того, при глубоком уменьшении потока возбуждения усиливается размагничивающее действие реакции якоря, жесткость механической характеристики растет, и падающая характеристика при номинальном потоке может стать возрастающей при ослабленном потоке, что приведет к нарушению устойчивой работы двигателя.
Регулирование частоты вращения двигателя путем введения в цепь якоря дополнительного сопротивления  позволяет изменять частоту вращения вниз от номинальной в широких пределах (рис. 6.44). Но этот способ не экономичен. Полезная мощность двигателя при постоянном моменте пропорциональна частоте вращения (без учета потерь в якоре):
позволяет изменять частоту вращения вниз от номинальной в широких пределах (рис. 6.44). Но этот способ не экономичен. Полезная мощность двигателя при постоянном моменте пропорциональна частоте вращения (без учета потерь в якоре): ,
,
а потребляемая из сети мощность от частоты вращения не зависит,  .
.
Поэтому КПД двигателя пропорционален частоте вращения якоря,
 |
 .
.
Кроме того, при введении дополнительного сопротивления  жесткость механической характеристики двигателя снижается, что может привести к ухудшению работы приводного механизма.
жесткость механической характеристики двигателя снижается, что может привести к ухудшению работы приводного механизма.
Более совершенным способом регулирования частоты вращения вниз является регулирование путем изменения подводимого к двигателю напряжения. На рис. 6.45 представлены механические характеристики двигателя параллельного возбуждения для трех значений напряжений. Жесткость механических характеристик практически не меняется, поэтому таким способом можно регулировать частоту вращения от номинальной до нуля.
Этот способ по существу сходен с частотным регулированием угловой скорости в машинах переменного тока, так как закон изменения напряжения и частоты тока в якоре близок к  при постоянном потоке Ф:
при постоянном потоке Ф: .
.
В качестве источников регулируемого напряжения используются генератор постоянного тока (рис. 6.41, а) либо полупроводниковый выпрямитель (рис. 6.41, б). Схема с полупроводниковым выпрямителем обладает более высоким быстродействием по сравнению со схемой генератор-двигатель, но уступает по перегрузочной способности. Кроме того, работа полупроводникового преобразователя ухудшает качество электрической энергии сети переменного тока из-за генерации высших гармоник напряжения и тока.
Рассмотренные способы регулирования частоты вращения двигателей параллельного возбуждения применяются и в двигателях смешанного возбуждения.
 |
Регулирование частоты вращения двигателей последовательного возбуждения осуществляется путем изменения тока в последовательной обмотке  или напряжения якоря U с помощью шунтирующих реостатов (рис. 6.46).
или напряжения якоря U с помощью шунтирующих реостатов (рис. 6.46).
При шунтировании обмотки возбуждения ток  уменьшается и частота вращения якоря растет, а при шунтировании якоря напряжение якоря уменьшается, поэтому частота вращения падает (рис. 6.47).
уменьшается и частота вращения якоря растет, а при шунтировании якоря напряжение якоря уменьшается, поэтому частота вращения падает (рис. 6.47).
Регулирование частоты вращения вверх осуществляется практически при постоянном КПД  .
.
Верхний уровень частоты вращения ограничивается условиями коммутации.
Регулирование частоты вращения вниз может осуществляться вплоть до нуля, однако КПД этого способа снижается пропорционально напряжению якоря и частоте вращения: ,
,
где  — частота вращения якоря при
— частота вращения якоря при  .
.
Таким образом, этот способ регулирования так же, как и реостатный способ регулирования частоты вращения двигателя с параллельным возбуждением, является неэкономичным. Он используется лишь в случае двигателей малой мощности.
Пуск, реверс и регулирование частоты вращения электродвигателя постоянного тока.
Пуск в ход двигателей постоянного тока производится с помощью пусковых или пускорегулирующих реостатов, а также отдельных резисторов, включение которых осуществляется контакторами. Это необходимо для ограничения пускового тока. Двигатели мощностью в несколько киловатт допускается пускать без реостатов и резисторов, т. е. непосредственным (прямым) подключением обмотки якоря к питающей сети, поскольку цепь якоря таких двигателей имеет значительное сопротивление, при котором пусковой ток не представляет особой опасности.
Пусковой реостат рассчитывается на кратковременную работу под током (время разгона двигателей составляет 0,5—1,5 с), пускорегулирующий реостат — на длительную работу под током.
Реверсирование — изменение направления вращения двигателей постоянного тока — можно осуществлять двумя способами:
- изменением направления тока обмотки якоря
- изменением направления тока обмотки возбуждения (представив себе правило левой руки, нетрудно понять, что в том и другом случае ротор двигателя изменит направление вращения).
В большинстве случаев предпочтение отдается первому способу, так как при его использовании необходимо изменить только полярность на зажимах обмотки якоря. При втором способе количество операций увеличивается почти вдвое: необходимо отключить обмотку якоря, переключить полярность на зажимах обмотки возбуждения и подключить обмотку якоря к питающей сети. Если обмотку якоря не отключить от сети, то в момент переключения обмотки возбуждения двигатель оказывается в пусковом режиме (по существу, это режим короткого замыкания).
Одним из основных достоинств двигателей постоянного тока является возможность регулирования их частоты вращения в широких пределах и плавно, как это позволяет схема управления (теоретически — без ступеней перехода от одной частоты к другой).
Частота вращения двигателей постоянного тока независимо от системы их возбуждения выражается следующим образом:
Из формулы видно, что частоту вращения можно регулировать изменением напряжения сети U, падения напряжения Iя(Rпр+r) и магнитного потока Ф.
Напряжение сети можно изменять только в тех случаях, когда двигатель имеет собственный источник электроэнергии (генератор, преобразователь).
Падение напряжения зависит от значения сопротивления пуско-регулирующего реостата.
Магнитный поток — от тока возбуждения и сопротивления реостата возбуждения.
При работе двигателей с номинальной частотой вращения сопротивление Rпр пускорегулирующего реостата всегда равно нулю, т. е. реостат полностью закорочен. Если сопротивление реостата постепенно увеличивать то падение напряжения Iя(Rпр+r) будет также увеличиваться, а разность U — Iя(Rпр+r) уменьшаться. Это связано с уменьшением частоты вращения двигателя от номинальной до нуля, когда U = Iя(Rпр+r). По мере уменьшения сопротивления пускорегулирующего реостата частота вращения двигателя возрастет от нуля до номинальной. Следует отметить, что момент вращения двигателей при таком способе регулирования частоты вращения сохраняется постоянным. Длительное снижение частоты вращения двигателей при номинальной нагрузке допускается только в том
случае, когда они имеют независимую вентиляцию. Основным недостатком данного способа регулирования частоты вращения является большая потеря мощности Iя2 Rпр, которая превращается в тепло, излучаемое пускорегулирующим реостатом.
Цепь возбуждения двигателей параллельного (независимого) и смешанного возбуждения рассчитывается так, чтобы при номинальном токе возбуждения последовательно с обмоткой возбуждения сохранялась включенной небольшая часть сопротивления rр регулятора возбуждения. Если рукоятку регулятора перемещать, уменьшая ею сопротивление, ток возбуждения и магнитный поток Ф будут расти, а частота вращения двигателя — уменьшаться. Если сопротивление регулятора увеличивать, ток возбуждения и поток будут уменьшаться, а частота вращения двигателя увеличиваться. Данный способ позволяет уменьшать частоту вращения двигателя примерно на 20% и увеличивать ее в два раза по сравнению с номинальной частотой вращения. При регулировании частоты вращения данным способом величина противо-ЭДС сохраняется постоянной (поскольку nФ = const). Электромагнитная мощность двигателя также сохраняется постоянной. Вращающий момент двигателя изменяется в зависимости от потока Ф. Значение потери мощности при регулировании невелико.
Практически регулирование частоты вращения двигателей в пределах от нуля до номинальной осуществляется с использованием пускорегулирующих реостатов. Для регулирования частоты в пределах от номинальной и выше используются регуляторы возбуждения.
Регулирование частоты вращения путем изменения магнитного потока Ф двигателей последовательного, возбуждения осуществляется с использованием сопротивлений, включенных по схеме рис. 1.45.
При включении сопротивления R1 параллельно обмотке возбуждения ток нагрузки двигателя I делится на токи I1 и I2, значения которых обратно пропорциональны сопротивлениям Rв и R1. Этим достигается возможность уменьшения тока возбуждения I2 и повышения частоты вращения двигателя. При включении сопротивления R2 параллельно обмотке якоря через обмотку возбуждения проходит ток, величина которого больше на величину тока I3, в результате чего поток увеличивается, а частота вращения двигателя уменьшается. Таким способом получают очень низкие, так называемые ползучие, частоты вращения двигателя.
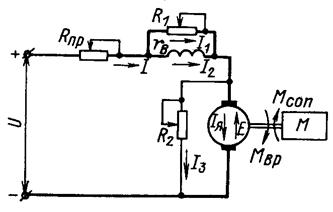
Рис. 1.45. Схема принципиальная двигателя последовательного возбуждения, обеспечивающая все способы регулирования частоты вращения.
Для регулирования частоты вращения двигателя независимого возбуждения используется также система генератор—двигатель (Г—Д), которая представлена на рис. 1.46.
В данной системе частота вращения двигателя nд может регулироваться изменением напряжения генератора U, подводимого к обмотке якоря, и изменением потока двигателя. В первом случае с помощью регулятора возбуждения rр.г изменяется ток возбуждения генератора, во втором случае с помощью регулятора возбуждения rр.д изменяется ток возбуждения двигателя. К достоинствам системы Г—Д относят отсутствие в цепи тока нагрузки двигателя пускорегулирующего реостата, что значительно снижает потери на регулирование. Такая система позволяет регулировать частоту вращения двигателя в очень широком диапазоне и с большой плавностью. Пуск в ход двигателя осуществляется повышением тока возбуждения генератора, а реверсирование двигателя – изменением направления тока возбуждения генератора.
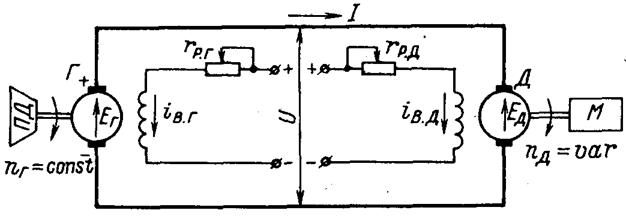
Рис. 1.46. Схема электрическая принципиальная системы Г—Д, обеспечивающая регулирование частоты вращения двигателя независимого возбуждения.