


§ 168. Электрорадиомонтажник по обслуживанию испытаний (5-й разряд)
§ 168. Электрорадиомонтажник по обслуживанию испытаний
5-й разряд
Характеристика работ. Присоединение стендовых систем электроавтоматики и измерений к распределительным щитам. Монтаж, регулирование, испытание и сдача особо сложных ответственных образцов блоков, бортовых приборов по принципиальным схемам с отработкой монтажных схем с учетом особенностей конструкций и требований, предъявляемых к прибору. Подготовка объекта к сложным тензоизмерениям и телеизмерениям. Наклеивание датчиков сопротивления, установка датчиков давления, температур. Электрорадиомонтаж и пайка радиосхем. Подготовка к испытанию, проверка, настройка и обслуживание станций, регистрирующих давление, тензостанций, осциллографов всех типов, настройка приборов стендовых систем. Наладка радиотелеметрической аппаратуры. Проверка измерительных линий и входных устройств приборов с помощью мегометров, звукового генератора и осциллографа.
Должен знать: основные сведения по механике и оптике; монтажные схемы стендовых систем электроавтоматики и измерений и принципиальные схемы специзмерений; устройство и принципы действия и конструкцию регистрирующей и усилительной аппаратуры (шлейфовых осциллографов, потенциометров), тензометрических станций, электронных хронометров и т. д.; методы испытания особо сложных групповых соединений бортовых приборов станций, включаемых в монтажную схему применяемой аппаратуры; устройство узлов управления и отдельных приборов, неполадки и способы их предупреждения и устранения; материальную часть изделия.
д.; методы испытания особо сложных групповых соединений бортовых приборов станций, включаемых в монтажную схему применяемой аппаратуры; устройство узлов управления и отдельных приборов, неполадки и способы их предупреждения и устранения; материальную часть изделия.
Открыть полный текст документа
Анализ осциллограммы давления в цилиндре
Осциллограмма давления в цилиндре является одним из богатейших источников диагностической информации. Прежде всего, следует уяснить, что эта осциллограмма не отображает те или иные параметры механической части двигателя непосредственно. Она отображает процесс движения газов в цилиндре, по которому можно косвенно судить о работе механизма газораспределения, состоянии цилиндропоршневой группы, проходимости выпускного тракта и многом другом. В дальнейшем речь пойдет, в частности, о моментах открытия, закрытия либо перекрытия клапанов. Нужно понимать, что это не есть их реальные геометрические углы, обусловленные конструкцией распределительного вала.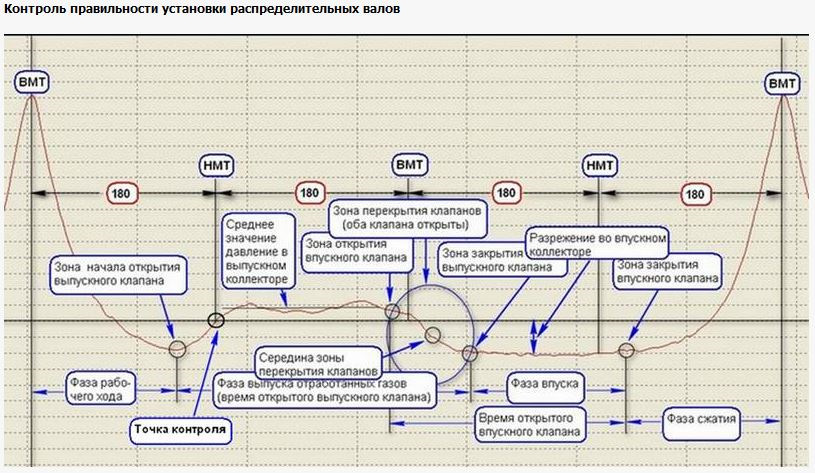
Для получения осциллограммы давления в цилиндре необходимо прогреть двигатель до рабочей температуры, установить в исследуемый цилиндр датчик давления вместо вывернутой свечи, а высоковольтный провод этой свечи установить на разрядник. В случае, когда двигатель оснащен единым модулем зажигания на все цилиндры (некоторые моторы Opel, Peugeot, Renault), можно снять модуль и установить дополнительные высоковольтные провода между его выводами и свечами, соблюдая при этом меры предосторожности. Если возможно, отключить разъем от форсунки диагностируемого цилиндра, чтобы исключить подачу топлива. Синхронизацию при снятии осциллограммы лучше использовать внешнюю, от датчика первого цилиндра. Запустить двигатель и снять осциллограмму на холостом ходу.
Рассмотрим участки и характерные точки осциллограммы по порядку, одновременно упоминая о том, какую информацию можно извлечь из их формы и значения давления.
РИСУНОК 1.
Максимум давления в цилиндре соответствует верхней мертвой точке (ВМТ). Строго говоря, этот максимум и ВМТ не совпадают, но для решения задач диагностики это расхождение несущественно. ВМТ такта сжатия диагностируемого цилиндра принимают за нулевую точку угла поворота коленчатого вала.
Первое, на что следует обратить внимание, — это реальный угол опережения зажигания. Программа отмечает момент синхронизации тонкой серой полосой, которая при использовании внешней синхронизации представляет собой ни что иное, как момент искрообразования в цилиндре. Как вариант, можно вместе с осциллограммой давления снять и осциллограмму высокого напряжения в исследуемом цилиндре. Эта наглядная «картинка» соотношения ВМТ и момента искрообразования просто замечательна при поиске причин незапуска двигателя. Следует заметить, что полученный таким образом угол является реальным и может не совпадать с углом, отображаемым сканером. В случае большого расхождения есть смысл проверить задающий диск двигателя.
Второе, что нужно сделать перед дальнейшим анализом осциллограммы, — это убедиться, что называется, «навскидку» в отсутствии серьезных механических проблем в проверяемом цилиндре.
РИСУНОК 2.
Делается это путем сравнения давлений в точках 1 и 2. Идея этой методики заключается в следующем. При сжатии поршнем газов часть из них неизбежно просочится через уплотнения цилиндра, вследствие чего давление в точке 2 относительно точки 1 упадет. В то же время, температура газов вырастет вследствие сжатия их поршнем и контакта с горячими стенками цилиндра, что приводит к росту давления. Поэтому у исправного двигателя давление в точке 1 должно быть приблизительно равно давлению в точке 2. Если же в цилиндре имеются серьезные механические дефекты (прогар клапана, сломанные кольца, неисправность в механизме газораспределения), то давление 1 будет заметно выше давления 2 из-за значительной утечки сжимаемых в цилиндре газов.
РИСУНОК 3.
Приведенная методика скорее оценочная, серьезные выводы о состоянии уплотнений цилиндра лучше делать с использованием пневмотестера.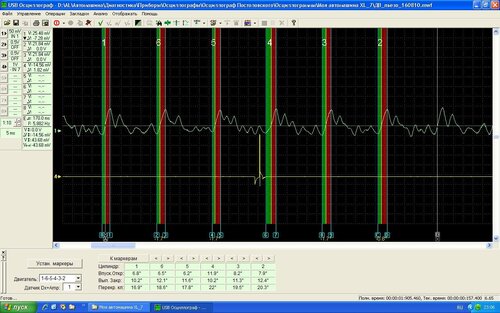
Если момент искрообразования на месте, и явных механических дефектов не обнаружено, приступаем к дальнейшему анализу осциллограммы. Начнем с верхней мертвой точки.
Значение давления в ВМТ
— параметр интегральный, зависящий от множества факторов. Означает ли это, что из него невозможно сделать достоверное заключение о наличии либо отсутствии какого-либо дефекта? К сожалению, да. Но понимать, отчего это значение зависит, и соответствующим образом его интерпретировать совершенно необходимо. А поэтому перечислим основные факторы, оказывающие влияние на значение давления в ВМТ.
Степень сжатия двигателя.
Естественно, чем выше степень сжатия, тем выше давление. Разница будет заметна не только на конструктивно разных моторах, но и на двигателях одной и той же модели. Это связано в первую очередь с изменением степени сжатия в процессе эксплуатации, например вследствие обрастания нагаром камеры сгорания и днища поршня.
Абсолютное давление во впускном коллекторе.
Так как наполнение цилиндра происходит из впускного коллектора через открытый впускной клапан, то количество поступивших газов, а следовательно, и давление в ВМТ напрямую зависит от значения абсолютного давления. Повышенное значение последнего чаще всего бывает следствием подсоса воздуха в задроссельное пространство. Вообще, подсос обнаруживается по наличию двух признаков: высокому давлению в ВМТ и низкому значению вакуума во впускном коллекторе. Пример такой осциллограммы будет приведен ниже.
Состояние газораспределительного вала.
Например, износ впускного кулачка также приведет к плохому наполнению цилиндра и, как следствие, низкому давлению в ВМТ.
Состав смеси.
Оптимальным составом смеси, на котором наиболее эффективно работает двигатель, является стехиометрический. Напомним, что стехиометрическим называют состав, в котором соотношение масс воздуха и топлива составляет 14,7:1. Отклонение от стехиометрии как в сторону обогащения, так и в сторону обеднения приводит к тому, что двигатель выходит из оптимального режима работы, в результате чего снижаются обороты холостого хода.
Угол опережения зажигания.
Выше упоминалось, что перед анализом осциллограммы необходимо убедиться в правильной установке УОЗ, чтобы исключить влияние последнего на достоверность наших выводов. Поясним, как связаны между собой УОЗ и давление в ВМТ. Отклонение значения УОЗ от оптимального, как в сторону более позднего, так и в сторону слишком раннего зажигания, приводит к снижению значения оборотов холостого хода. Это опять-таки вызывает дополнительное открытие РХХ, рост абсолютного давления во впускном коллекторе и, соответственно, увеличение давления в ВМТ.
Состояние цилиндро-поршневой группы и клапанов.
Наличие значительных утечек газов из цилиндра при неудовлетворительном состоянии этих узлов также приведет к снижению давления в ВМТ.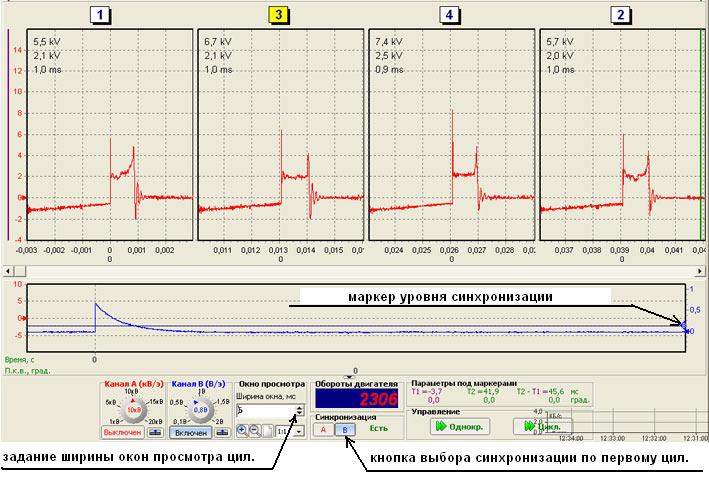 Но, как уже упоминалось, произвести приблизительную оценку их состояния необходимо сразу после снятия осциллограммы, до ее детального анализа.
Но, как уже упоминалось, произвести приблизительную оценку их состояния необходимо сразу после снятия осциллограммы, до ее детального анализа.
Еще один важный фактор — количество цилиндров двигателя. Поясним на простом примере. Дело в том, что при снятии осциллограммы исследуемый цилиндр не вносит вклад в работу двигателя. На трехцилиндровом моторе это будет один из трех, а на восьмицилиндровом — один из восьми цилиндров. В первом случае значительно возрастает нагрузка на оставшиеся цилиндры. Как следствие, для поддержания оборотов холостого хода значительно открывается РХХ, что приводит к увеличению давления в ВМТ. Поэтому, исследуя трехцилиндровый Дэу Матиз, не нужно удивляться высокому значению этого давления.
Значение давления в верхней мертвой точке исправного четырехцилиндрового двигателя колеблется от 4.5 до 6 бар. Меньшие значения говорят чаще всего о серьезных механических дефектах исследуемого цилиндра, большие — повод поискать подсос воздуха либо причину повышенной нагрузки на двигатель.
Спад давления после ВМТ соответствует движению поршня вниз. Выпускной клапан начинает открываться до того, как поршень достигнет нижней мертвой точки, которой соответствует угол поворота коленчатого вала 180 градусов. Происходит это потому, что при реальной работе мотора отработавшие газы находятся под большим давлением, и несмотря на то, что объем цилиндра увеличивается, начинается их истечение через выпускной клапан. В нашем случае, так как воспламенения не происходит, давление в цилиндре в момент открытия выпускного клапана ниже атмосферного и примерно равно разрежению на впуске. Поэтому при открытии выпускного клапана начинается движение газов из выпускного тракта в цилиндр, и давление в последнем начинает расти.
Момент начала роста давления в цилиндре можно условно принять за момент начала открытия выпускного клапана. Для более точного измерения рекомендуется значительно растянуть осциллограмму по оси Y.
РИСУНОК 4.
Затем при помощи измерительных линеек определить угол от ВМТ до момента открытия выпускного клапана. Это значение позволяет сделать однозначный вывод о правильности установки выпускного распредвала на двухвальном моторе либо распредвала на одновальном. На подавляющем большинстве двигателей угол открытия выпускного клапана составляет 140-145 градусов поворота коленчатого вала, лишь на некоторых моторах, имеющих «опелевские» корни, этот угол составляет 160 градусов. Если измеренный на осциллограмме угол укладывается в указанный диапазон, то считается, что распредвал установлен верно. Напомним, что речь идет о наблюдаемом нами виртуальном газодинамическом угле, реальные же углы открытия и закрытия клапанов у различных моторов могут значительно отличаться.
Это значение позволяет сделать однозначный вывод о правильности установки выпускного распредвала на двухвальном моторе либо распредвала на одновальном. На подавляющем большинстве двигателей угол открытия выпускного клапана составляет 140-145 градусов поворота коленчатого вала, лишь на некоторых моторах, имеющих «опелевские» корни, этот угол составляет 160 градусов. Если измеренный на осциллограмме угол укладывается в указанный диапазон, то считается, что распредвал установлен верно. Напомним, что речь идет о наблюдаемом нами виртуальном газодинамическом угле, реальные же углы открытия и закрытия клапанов у различных моторов могут значительно отличаться.
Если говорить о моторах ВАЗ, то перестановка ремня ГРМ на один зуб дает смещение фаз газораспределения на 17 градусов в соответствующую сторону. Реально же на осциллограмме мы увидим смещение при ошибке на зуб приблизительно на 12 градусов, на два зуба — 26 градусов, и чем дальше, тем большее будет наблюдаться расхождение. Это происходит опять-таки в силу газодинамической природы рассматриваемой осциллограммы.
Надо сказать, что несовершенство технологии производства на ВАЗе приводит к значительным расхождениям угла от одного экземпляра двигателя к другому при абсолютно правильно установленном ремне ГРМ.
Далее. На участке последующего нарастания давления происходит процесс открытия выпускного клапана. Этот участок осциллограммы должен быть гладким. Наличие неровностей в виде всплесков или даже «пилы» говорит о значительном износе направляющей втулки выпускного клапана. Вибрация последнего при открытии и является причиной пульсаций давления. Ниже приведен пример осциллограммы такого явления.
РИСУНОК 5.
При 180 градусах поворота коленчатого вала поршень попадает в нижнюю мертвую точку. Участок осциллограммы от этой точки до точки 360 градусов соответствует движению поршня вверх, к ВМТ такта выпуска, или ВМТ 360 градусов. После выравнивания давления в цилиндре и в выпускном тракте начинается вытеснение газов из цилиндра. В этот момент выпускной клапан открыт, а поршень движется вверх. Другими словами, давление в цилиндре фактически есть ни что иное, как давление в выпускном тракте. Этот замечательный факт позволяет нам сделать вывод о проходимости выпускного тракта, установив соответствующим образом измерительные линейки и оценив полученное значение.
Другими словами, давление в цилиндре фактически есть ни что иное, как давление в выпускном тракте. Этот замечательный факт позволяет нам сделать вывод о проходимости выпускного тракта, установив соответствующим образом измерительные линейки и оценив полученное значение.
Вполне нормальным считается давление на этом участке в пределах 0,1-0,15 бар. Если оно значительно выше, до 1-1.5 бар, это однозначно указывает на внутреннее разрушение катализатора либо глушителя. Незначительные превышения также чаще всего бывают связаны с теми или иными внутренними разрушениями, хотя также возможен износ кулачка выпускного клапана. В сомнительных случаях есть смысл рассоединить сочленения выпускного тракта и произвести повторное измерение.
На участке осциллограммы, соответствующем выпуску отработанных газов, наблюдаются неровности. Причина их появления — волновые и резонансные процессы в выпускном тракте. Чем лучше настроен выпускной тракт на конкретный двигатель, тем ровнее будет этот участок осциллограммы. Сравнение осциллограмм моторов отечественного и иностранного производства позволяет сделать неутешительный вывод о том, что к настройке выпуска зарубежные автопроизводители относятся гораздо более серьезно.
Сравнение осциллограмм моторов отечественного и иностранного производства позволяет сделать неутешительный вывод о том, что к настройке выпуска зарубежные автопроизводители относятся гораздо более серьезно.
Рассмотрим верхнюю мертвую точку такта выпуска, соответствующую 360 градусам поворота коленчатого вала. Незадолго перед ней впускной клапан начинает открывать канал, через который внутренний объём цилиндра соединяется с впускным коллектором. Абсолютное давление во впускном коллекторе значительно ниже давления в цилиндре. Так как выпускной клапан все еще открыт, то давление в цилиндре практически равно давлению в выпускном коллекторе. По этой причине обнаружить момент начала открытия впускного клапана на осциллограмме давления в цилиндре большинства двигателей невозможно.
Говоря о ВМТ выпуска, следует заострить внимание на характерной точке, соответствующей перекрытию клапанов. Речь идет о газодинамическом перекрытии, когда проходные сечения канала впуска и выпуска уравниваются. Так как диаметры тарелок впускного и выпускного клапанов различны, перекрытие наступает при различных значениях вылета этих клапанов. На некоторых моторах геометрическое перекрытие клапанов может отсутствовать вообще. Но виртуальное газодинамическое перекрытие присутствует всегда, независимо от конструкции двигателя. На осциллограмме этот момент соответствует началу резкого спада давления в конце такта выпуска. Для оптимальной работы мотора момент газодинамического перекрытия должен совпадать с отметкой 360 градусов, что и наблюдается при исследовании двигателей разных производителей.
Так как диаметры тарелок впускного и выпускного клапанов различны, перекрытие наступает при различных значениях вылета этих клапанов. На некоторых моторах геометрическое перекрытие клапанов может отсутствовать вообще. Но виртуальное газодинамическое перекрытие присутствует всегда, независимо от конструкции двигателя. На осциллограмме этот момент соответствует началу резкого спада давления в конце такта выпуска. Для оптимальной работы мотора момент газодинамического перекрытия должен совпадать с отметкой 360 градусов, что и наблюдается при исследовании двигателей разных производителей.
Обратим внимание на такой нюанс. Если при анализе осциллограммы давления в цилиндре окажется, что момент перекрытия изменяет свое положение от кадра к кадру, то это говорит об ослаблении натяжения ремня ГРМ.
Когда поршень, достигнув верхней мертвой точки, изменят направление движения на противоположное, выпускной клапан уже почти закрыт. Вследствие этого внутренний объём цилиндра разобщается выпускным коллектором. Впускной клапан при этом продолжает открываться, и давление в цилиндре начинает уравниваться с давлением во впускном коллекторе. Так как значение давления в цилиндре достаточно высокое, газы из цилиндра начинают перетекать во впускной коллектор, где давление значительно ниже атмосферного. Вскоре давления в цилиндре и впускном коллекторе практически выравниваются. Поршень при этом движется вниз, впускной клапан открыт, и значение давления на участке впуска есть ни что иное, как вакуум во впускном коллекторе. Его усредненное значение на исправном моторе составляет 0.6 бар. Если значение вакуума ниже, это повод искать причину дефекта. К сожалению, вакуум во впускном коллекторе, как и рассмотренное выше давление в ВМТ сжатия, зависит от целого ряда факторов. Небольшие затухающие колебания на участке впуска возникают предположительно из-за резонансных процессов во впускном тракте.
Впускной клапан при этом продолжает открываться, и давление в цилиндре начинает уравниваться с давлением во впускном коллекторе. Так как значение давления в цилиндре достаточно высокое, газы из цилиндра начинают перетекать во впускной коллектор, где давление значительно ниже атмосферного. Вскоре давления в цилиндре и впускном коллекторе практически выравниваются. Поршень при этом движется вниз, впускной клапан открыт, и значение давления на участке впуска есть ни что иное, как вакуум во впускном коллекторе. Его усредненное значение на исправном моторе составляет 0.6 бар. Если значение вакуума ниже, это повод искать причину дефекта. К сожалению, вакуум во впускном коллекторе, как и рассмотренное выше давление в ВМТ сжатия, зависит от целого ряда факторов. Небольшие затухающие колебания на участке впуска возникают предположительно из-за резонансных процессов во впускном тракте.
Достигнув нижней мертвой точки 540 градусов, поршень вновь начинает движение к головке блока цилиндров. Но впускной клапан при этом некоторое время остаётся всё ещё открытым. Поясним, почему. Дело в том, что процесс движения газов из впускного коллектора в цилиндр имеет значительную инерционность, и несмотря на то, что поршень движется к ВМТ и объем цилиндра уменьшается, через открытый впускной клапан продолжается наполнение цилиндра за счет инерции потока. Опоздание закрытия впускного клапана служит для улучшения наполняемости цилиндра топливовоздушной смесью. Данный эффект зависит от частоты вращения коленчатого вала и от степени открытия дроссельной заслонки. Момент закрытия впускного клапана подбирается при проектировании таким образом, чтобы «дозаряд» цилиндров был максимальным при определенном значении оборотов и полностью открытом дросселе. Если же двигатель работает с низкой частотой вращения коленчатого вала, эффект от позднего закрытия впускного клапана отрицательный: часть газов перетекает обратно во впускной коллектор.
Но впускной клапан при этом некоторое время остаётся всё ещё открытым. Поясним, почему. Дело в том, что процесс движения газов из впускного коллектора в цилиндр имеет значительную инерционность, и несмотря на то, что поршень движется к ВМТ и объем цилиндра уменьшается, через открытый впускной клапан продолжается наполнение цилиндра за счет инерции потока. Опоздание закрытия впускного клапана служит для улучшения наполняемости цилиндра топливовоздушной смесью. Данный эффект зависит от частоты вращения коленчатого вала и от степени открытия дроссельной заслонки. Момент закрытия впускного клапана подбирается при проектировании таким образом, чтобы «дозаряд» цилиндров был максимальным при определенном значении оборотов и полностью открытом дросселе. Если же двигатель работает с низкой частотой вращения коленчатого вала, эффект от позднего закрытия впускного клапана отрицательный: часть газов перетекает обратно во впускной коллектор.
Увидеть момент закрытия впускного клапана на осциллограмме можно лишь приблизительно.
1. На холостом ходу, когда в момент закрытия клапана газы из цилиндра перетекают в коллектор, это будет момент начала роста давления.
2. На повышенных оборотах, когда в момент закрытия клапана происходит процесс «дозаряда» цилиндра, будет виден небольшой перелом графика. Этот перелом возникает из-за того, что давление до полного закрытия клапана повышалось вследствие сжатия и «дозаряда», а после закрытия — только за счет сжатия. В идеальном случае горба быть не должно вообще, но на реальных серийных моторах добиться этого невозможно.
Момент закрытия впускного клапана на осциллограмме давления должен находиться примерно на отметке 580 градусов. Правильность установки впускного газораспределительного вала на двухвальном моторе можно установить по положению перекрытия клапанов и моменту закрытия впускного клапана.
После полного закрытия впускного клапана поршень движется к ВМТ такта сжатия, и цикл повторяется сначала.
Подведем краткий итог. Осциллограмма давления в цилиндре позволяет нам определить:
Осциллограмма давления в цилиндре позволяет нам определить:
1. Реальный угол опережения зажигания по соотношению ВМТ и импульса высокого напряжения.
2. Состояние механической части по разнице давлений до и после сжатия (приблизительно).
3. Правильность установки выпускного распредвала по углу открытия выпускного клапана.
4. Правильность установки впускного распредвала по положению перекрытия клапанов и моменту открытия впускного клапана.
5. Состояние направляющей втулки выпускного клапана по форме осциллограммы.
6. Проходимость выпускной системы по значению давления в момент выпуска газов.
7. Наличие и значение вакуума во впускном коллекторе.
8. Наличие слабины ремня ГРМ по разнице углов перекрытия клапанов от кадра к кадру.
(Статья взята с сайта http://www.quantexlab.ru/)
данные измерения можно произвести у нас.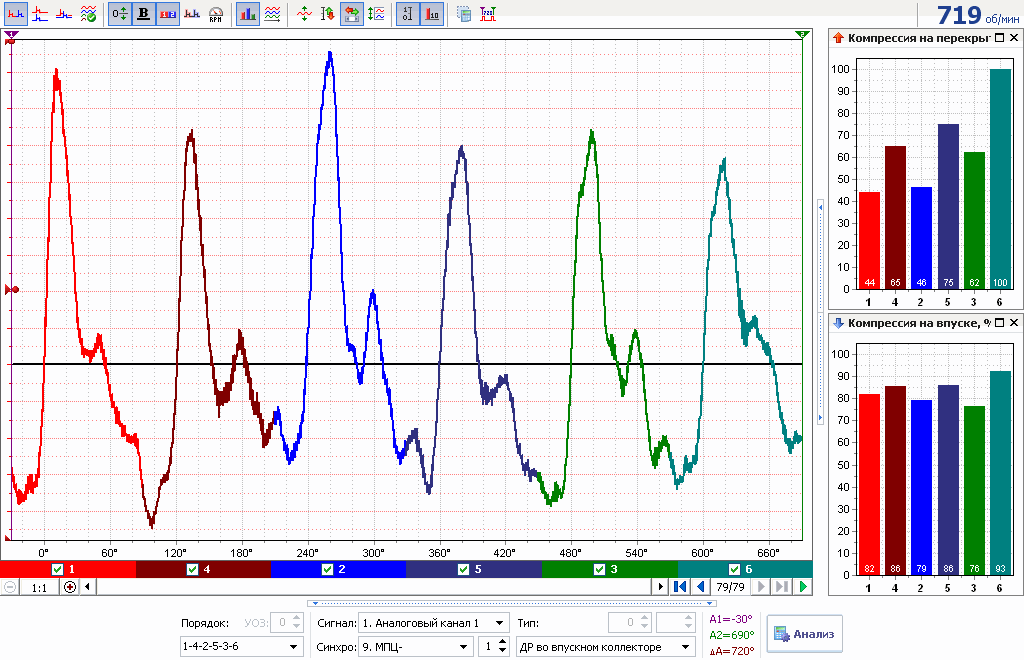
Время снятия осциллограммы давления занимает около полу часа + консультация.
СПБ 2012
Motorhelp.ru диагностика и ремонт двигателя
С помощью мотор-тестера по датчику разряжения (ДР), подключенному к впускному коллектору, можно отследить фазы газораспределительного механизма и углы открытия и закрытия клапанов. Коснусь немного теории диагностики по датчику разряжения. Лучше всего о методике диагностики по ДР рассказывает Сергей Федоренко.1. В то время когда поршень в первом цилиндре (после вспышки смеси) движется вниз, в 4-м цилиндре происходит такт впуска и поршень тоже движется вниз, создавая всё больший вакуум во впускном коллекторе. Ведь цилиндр через открытый впускной клапан, соединён с впускным коллектором. Это мы и наблюдаем на осцилограмме (правый склон). Порядок работы цилиндров по ДР 4-2-1-3 начиная от метки синхронизации ВВ первого цилиндра. Максимальную линейную скорость поршень набирает в точке 90 град.
 поворота коленвала от ВМТ. После прохождения этой точки поршень начинает замедлять свою скорость и на 128 град. он не может уже компенсировать поступление воздуха во впускной коллектор через калиброванную щель дроссельной заслонки и РХХ. Поэтому вакуум колеблется на одном уровне и даже начинает уменьшать своё значение, а тут ещё на 149 градусах начинает открываться впускной клапан во 2-м цилиндре, в котором заканчивается такт продувки.
поворота коленвала от ВМТ. После прохождения этой точки поршень начинает замедлять свою скорость и на 128 град. он не может уже компенсировать поступление воздуха во впускной коллектор через калиброванную щель дроссельной заслонки и РХХ. Поэтому вакуум колеблется на одном уровне и даже начинает уменьшать своё значение, а тут ещё на 149 градусах начинает открываться впускной клапан во 2-м цилиндре, в котором заканчивается такт продувки.Во 2-м цилиндре в это время присутствует давление 0.1-0.3атм. Это давление из цилиндра врывается во впускной коллектор и кривая осцилограммы резко идёт вверх(происходит потеря вакуума во впускном коллекторе) до тех пор, пока на 204 град. (24 град.после ВМТ) не закроется выпускной клапан. В цилиндре в этот момент начинает расти вакуум и кривая резко идёт вниз (это и есть точка закрытия выпускного клапана). На этом закончилась фаза перекрытия клапанов, по положению которой относительно ВМТ можно судить о правильности установки распредвала относительно кол
2.
 По смещению точек открытия и закрытия клапанов, мы можем судить о величине тепловых зазоров, состоянии гидрокомпенсаторов и износе кулачков распредвала. Ведь если зазор выпускного клапана увеличен — значит клапан будет закрываться раньше, чем в других цилиндрах и вершинка сдвинется влево, при этом будет ниже чем другие, потому что потеря вакуума прекратится раньше. Если во впускном клапане зазор будет увеличен — то клапан начнёт открываться позже и впадинка сдвинется вправо.
По смещению точек открытия и закрытия клапанов, мы можем судить о величине тепловых зазоров, состоянии гидрокомпенсаторов и износе кулачков распредвала. Ведь если зазор выпускного клапана увеличен — значит клапан будет закрываться раньше, чем в других цилиндрах и вершинка сдвинется влево, при этом будет ниже чем другие, потому что потеря вакуума прекратится раньше. Если во впускном клапане зазор будет увеличен — то клапан начнёт открываться позже и впадинка сдвинется вправо.3. Кроме того по положению низа осцилограммы по вертикали (относительно низа других цилиндров) можно судить о том, что в данном цилиндре не достигается такой же вакуум как в других цилиндрах. А это значит, что в цилиндре присутствуют неплотности (неисправны клапана, гидротолкатели). В исправном ДВС низ и верх осцилограммы всех цилиндров находятся на одном уровне (при отсутствии вмешательства ЭБУ)
4. По положению точки ВМТ по датчику разрежения относительно сигналу ДПКВ, можно судить о правильности установки распредвала относительно коленвала.

Верхней мертвой точкой по датчику разряжения является пересечение левого склона осциллограммы с нулевой линией.
Библиотека осциллограмм с датчика разряжения
Потихоньку собралась небольшая коллекция осциллограмм с датчика разряжения исправных двигателей. Со временем надеюсь она будет пополнятся. Так что если вы не нашли нужной осциллки, заходите позже, по мере возможности буду выкладывать новые.
Постарался везде «пробить» углы закрытия выпускных клапанов и кое-где впускные.
Осциллограмма с двигателя ВАЗ 21114i (1,6л 8 клапанов).
Осциллограмма с двигателя ВАЗ 2112 (1,5л 16 клапанов).
Осциллограмма с двигателя ВАЗ 21126 (Приора 1,6л 16 клапанов). Снято вместе сигналом ДПКВ.
Осциллограмма с двигателя ВАЗ 2123 Шевроле-Нива.
Осциллограмма с двигателя Nexia (8 клапанов)
Осциллограмма с двигателя Lacetti 1.4
Осциллограмма с двигателя Hyundai Accent 1.5 л
Осциллограмма с двигателя Mitsubishi Lancer 2.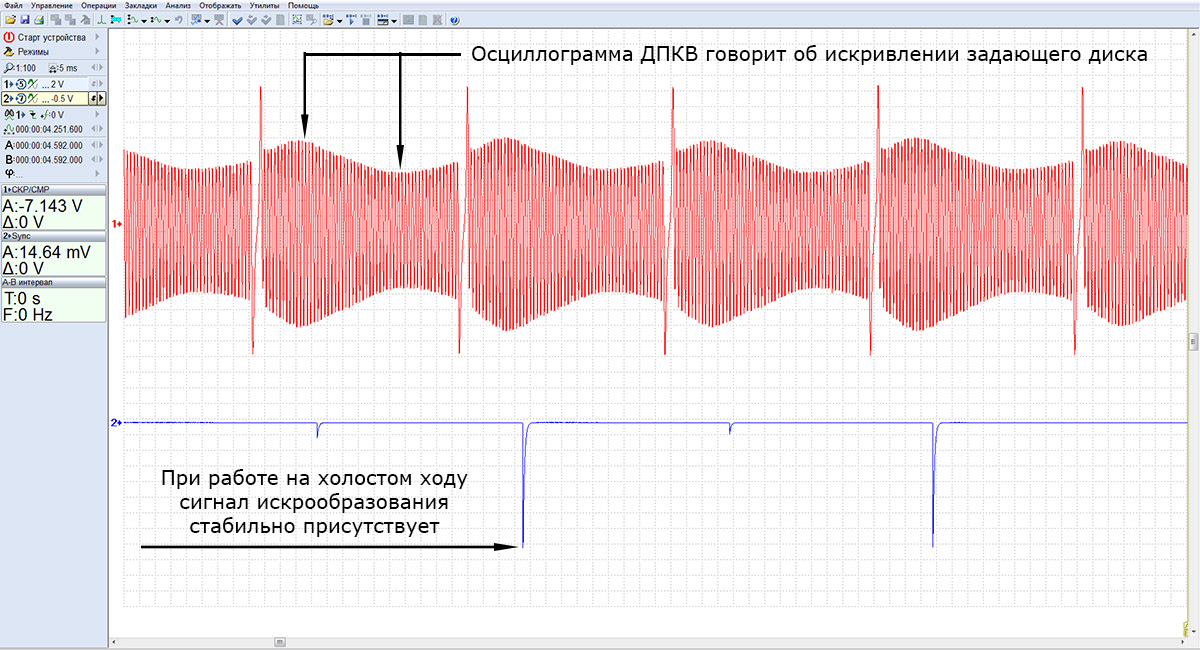 0 2002 г.в.
0 2002 г.в.
Осциллограмма с двигателя Mazda 626 1.8л FP
Осциллограмма с двигателя Volkswagen Golf 1.6 1995 г.в.
Осциллограмма с двигателя Ford Mondeo zetec 1.8
скачать dle 10.6фильмы бесплатно
%d0%be%d1%81%d1%86%d0%b8%d0%bb%d0%bb%d0%be%d0%b3%d1%80%d0%b0%d1%84%d0%b8%d1%80%d0%be%d0%b2%d0%b0%d0%bd%d0%b8%d0%b5 — со всех языков на все языки
Все языкиРусскийАнглийскийИспанский────────Айнский языкАканАлбанскийАлтайскийАрабскийАрагонскийАрмянскийАрумынскийАстурийскийАфрикаансБагобоБаскскийБашкирскийБелорусскийБолгарскийБурятскийВаллийскийВарайскийВенгерскийВепсскийВерхнелужицкийВьетнамскийГаитянскийГреческийГрузинскийГуараниГэльскийДатскийДолганскийДревнерусский языкИвритИдишИнгушскийИндонезийскийИнупиакИрландскийИсландскийИтальянскийЙорубаКазахскийКарачаевскийКаталанскийКвеньяКечуаКиргизскийКитайскийКлингонскийКомиКомиКорейскийКриКрымскотатарскийКумыкскийКурдскийКхмерскийЛатинскийЛатышскийЛингалаЛитовскийЛюксембургскийМайяМакедонскийМалайскийМаньчжурскийМаориМарийскийМикенскийМокшанскийМонгольскийНауатльНемецкийНидерландскийНогайскийНорвежскийОрокскийОсетинскийОсманскийПалиПапьяментоПенджабскийПерсидскийПольскийПортугальскийРумынский, МолдавскийСанскритСеверносаамскийСербскийСефардскийСилезскийСловацкийСловенскийСуахилиТагальскийТаджикскийТайскийТатарскийТвиТибетскийТофаларскийТувинскийТурецкийТуркменскийУдмурдскийУзбекскийУйгурскийУкраинскийУрдуУрумскийФарерскийФинскийФранцузскийХиндиХорватскийЦерковнославянский (Старославянский)ЧеркесскийЧерокиЧеченскийЧешскийЧувашскийШайенскогоШведскийШорскийШумерскийЭвенкийскийЭльзасскийЭрзянскийЭсперантоЭстонскийЮпийскийЯкутскийЯпонский
Все языкиРусскийАнглийскийИспанский────────АймараАйнский языкАлбанскийАлтайскийАрабскийАрмянскийАфрикаансБаскскийБашкирскийБелорусскийБолгарскийВенгерскийВепсскийВодскийВьетнамскийГаитянскийГалисийскийГреческийГрузинскийДатскийДревнерусский языкИвритИдишИжорскийИнгушскийИндонезийскийИрландскийИсландскийИтальянскийЙорубаКазахскийКарачаевскийКаталанскийКвеньяКечуаКитайскийКлингонскийКорейскийКрымскотатарскийКумыкскийКурдскийКхмерскийЛатинскийЛатышскийЛингалаЛитовскийЛожбанМайяМакедонскийМалайскийМальтийскийМаориМарийскийМокшанскийМонгольскийНемецкийНидерландскийНорвежскийОсетинскийПалиПапьяментоПенджабскийПерсидскийПольскийПортугальскийПуштуРумынский, МолдавскийСербскийСловацкийСловенскийСуахилиТагальскийТаджикскийТайскийТамильскийТатарскийТурецкийТуркменскийУдмурдскийУзбекскийУйгурскийУкраинскийУрдуУрумскийФарерскийФинскийФранцузскийХиндиХорватскийЦерковнославянский (Старославянский)ЧаморроЧерокиЧеченскийЧешскийЧувашскийШведскийШорскийЭвенкийскийЭльзасскийЭрзянскийЭсперантоЭстонскийЯкутскийЯпонский
границ | Суммы характеристик пиковой формы волны для декодирования двигателя
Введение
Традиционная цепочка обработки сигналов для кортикальных интерфейсов мозг-машина с проникающим электродом (Nicolelis, 2003; Bensmaia, Miller, 2014) состоит из обнаружения всплесков (потенциала действия), сортировки и декодирования с использованием отсортированного количества всплесков или времени всплесков. На этапе обнаружения всплеска обнаруживаются временные окна в записанном временном ряду напряжения, которые могут содержать потенциалы действия.Эти временные окна затем передаются алгоритму сортировки спайков, который использует форму кривых зависимости напряжения от времени (формы волны) в этих окнах для определения идентичности нейрона, который испустил спайк (Wheeler and Heetderks, 1982; Lewicki, 1998). ; Гибсон и др., 2012). Результатом этой классификации является метка нейрона для некоторой части, в зависимости от условий записи, обнаруженных пиков, а также время появления, измеренное на этапе обнаружения пиков. Те формы волны («хэш»), которые недостаточно соответствуют формам волн нейронов, которые, как предполагается, находятся рядом с электродом, традиционно отбрасываются, поскольку они могут быть загрязнены шумом или состоять из потенциалов действия от множества нейронов, смешанных вместе.Помеченные значения времени пиков затем передаются в декодер для оценки двигательного намерения или других представляющих интерес переменных.
На этапе обнаружения всплеска обнаруживаются временные окна в записанном временном ряду напряжения, которые могут содержать потенциалы действия.Эти временные окна затем передаются алгоритму сортировки спайков, который использует форму кривых зависимости напряжения от времени (формы волны) в этих окнах для определения идентичности нейрона, который испустил спайк (Wheeler and Heetderks, 1982; Lewicki, 1998). ; Гибсон и др., 2012). Результатом этой классификации является метка нейрона для некоторой части, в зависимости от условий записи, обнаруженных пиков, а также время появления, измеренное на этапе обнаружения пиков. Те формы волны («хэш»), которые недостаточно соответствуют формам волн нейронов, которые, как предполагается, находятся рядом с электродом, традиционно отбрасываются, поскольку они могут быть загрязнены шумом или состоять из потенциалов действия от множества нейронов, смешанных вместе.Помеченные значения времени пиков затем передаются в декодер для оценки двигательного намерения или других представляющих интерес переменных. Декодеры точечного процесса напрямую используют время пиков, в то время как декодеры, работающие с мгновенной частотой срабатывания, будут оценивать эту частоту с помощью счетчиков пиков в небольших временных окнах, вычисленных методом «биннинга»; существуют альтернативы биннингу, но они работают одинаково хорошо (Cunningham et al., 2009).
Декодеры точечного процесса напрямую используют время пиков, в то время как декодеры, работающие с мгновенной частотой срабатывания, будут оценивать эту частоту с помощью счетчиков пиков в небольших временных окнах, вычисленных методом «биннинга»; существуют альтернативы биннингу, но они работают одинаково хорошо (Cunningham et al., 2009).
Одним из альтернативных подходов к сортировке пиков с последующим декодированием является декодирование с использованием (функций) сигналов пиков напрямую.Этот подход использовался в нескольких исследованиях (Chen et al., 2012; Kloosterman et al., 2014; Todorova et al., 2014; Deng et al., 2015; Ventura, Todorova, 2015). В частности, Вентура и Тодорова (2015) предложили инновационный вычислительно эффективный метод включения информации о форме волны в линейные декодеры. При таком подходе рассчитываются характеристики каждой формы волны. Затем вычисляются первые p моментов этих характеристик для всех всплесков, возникающих в пределах временного интервала. Этот временной интервал может быть того же размера, что и интервал, используемый для оценки мгновенной скорострельности.Эти p моментов используются вместе со счетчиком пересечения порога (подсчет всех обнаруженных всплесков независимо от метки нейрона) в качестве входных данных для линейных декодеров, таких как фильтр Калмана или фильтр Винера. Вентура и Тодорова показывают, что этот подход сравним по точности с традиционной сортировкой спайков с последующим декодированием на основе подсчета спайков.
Этот временной интервал может быть того же размера, что и интервал, используемый для оценки мгновенной скорострельности.Эти p моментов используются вместе со счетчиком пересечения порога (подсчет всех обнаруженных всплесков независимо от метки нейрона) в качестве входных данных для линейных декодеров, таких как фильтр Калмана или фильтр Винера. Вентура и Тодорова показывают, что этот подход сравним по точности с традиционной сортировкой спайков с последующим декодированием на основе подсчета спайков.
В этом исследовании мы хотели протестировать подход Вентуры и Тодоровы на большем наборе автономных данных от двух макак-резусов. Мы также предлагаем модификацию их подхода.Вместо вычисления моментов признаков, которые вычисляют ожидания, мы вычисляем сумму признаков (в p-й степени). Это изменение в основном исключает деление на количество пересечений порога. Мы показываем, что этот подход, при использовании с амплитудой пиков, обеспечивает лучшую точность декодирования, чем традиционный отсортированный подсчет пиков. Мы также показываем, что использование суммы вместо момента дает значительно более точные офлайн-декодирования, хотя величина различий невелика.Затем мы анализируем некоторые варианты дизайна для подхода к декодированию характеристик сигнала.
Мы также показываем, что использование суммы вместо момента дает значительно более точные офлайн-декодирования, хотя величина различий невелика.Затем мы анализируем некоторые варианты дизайна для подхода к декодированию характеристик сигнала.
Мы также предоставляем данные для ответа на вопрос, является ли сортировка спайков полезной (Stark and Abeles, 2007; Won, 2007; Ventura, 2008; Fraser et al., 2009; Chestek et al., 2011; Smith and Paninski, 2013; Todorova). et al., 2014; Christie et al., 2015; Perel et al., 2015; Ventura, Todorova, 2015). Мы подтверждаем предыдущие выводы о том, что хэш не следует отбрасывать, так как он значительно увеличивает точность декодирования, если включен вместе с отсортированными счетчиками пиков (Todorova et al., 2014; Christie et al., 2015; Оби и др., 2016). Поскольку отсортированные счетчики всплесков традиционно не включают хеш, в то время как счетчики превышения пороговых значений включают хеш, сравнение этих двух методов фактически сравнивает два фактора: наличие хеша и использование сортировки всплесков. Таким образом, мы решили систематически исследовать все четыре комбинации этих двух факторов. Этот подход предлагает новый взгляд на дискуссии в сообществе о том, полезна ли сортировка спайков. В предыдущих исследованиях, сравнивающих отсортированное количество всплесков (без хеширования) с количеством пересечений порогового значения, смешивались эффекты двух факторов, поэтому в зависимости от относительного влияния этих факторов результаты различались.По нашим данным, когда сравнения производятся путем изменения только коэффициента сортировки, результаты благоприятствуют сортировке по пикам.
Таким образом, мы решили систематически исследовать все четыре комбинации этих двух факторов. Этот подход предлагает новый взгляд на дискуссии в сообществе о том, полезна ли сортировка спайков. В предыдущих исследованиях, сравнивающих отсортированное количество всплесков (без хеширования) с количеством пересечений порогового значения, смешивались эффекты двух факторов, поэтому в зависимости от относительного влияния этих факторов результаты различались.По нашим данным, когда сравнения производятся путем изменения только коэффициента сортировки, результаты благоприятствуют сортировке по пикам.
Методы
Моменты формы сигнала Характеристики
Использование таких характеристик, как амплитуда или ширина, вычисленных на формах пикового сигнала, в качестве входных данных для декодирования является интригующей альтернативой использованию подсчета отсортированных пиков. Для декодеров, которые работают с объединенными данными, т. Е. С одинаковыми временными интервалами, в которых может произойти более одного всплеска, одной из проблем применения этого подхода является вопрос о том, как агрегировать характеристики всех всплесков, которые были обнаружены во временном интервале, как количество всплесков во временном интервале варьируется. Теоретический вклад Вентуры и Тодорова (2015) состоит в том, чтобы показать, что одним из решений является вычисление моментов признаков:
Теоретический вклад Вентуры и Тодорова (2015) состоит в том, чтобы показать, что одним из решений является вычисление моментов признаков:
, где Wtp ¯ — вектор отсчетов p-го необработанных моментов характеристик сигнала во временном интервале t, a t — количество предполагаемых всплесков (или пересечений порога), обнаруженных во временном интервале t, i индексирует эти всплески, с i — это одиночный предполагаемый всплеск, функция f () вычисляет вектор характеристик формы волны из всплеска, а экспонента справа выполняется поэлементно.В этом разделе мы покажем, что использование сумм — это еще один способ агрегирования значений характеристик сигнала.
Мы рассматриваем один канал записи с K нейронами в момент регистрации нового пересечения порога. Кинематические переменные (или другие переменные, подлежащие декодированию) в данный момент представлены вектором x . Мы предполагаем, что формы волны каждого нейрона не меняются со временем или x , и поэтому распределение характеристик, вычисленных на основе его форм волны, является стационарным. Пусть μjp — вектор p-х моментов характеристик формы волны для нейрона j. Например, если у нас есть одна характеристика, амплитуда спайка, то μj1 — это средняя амплитуда спайка нейрона j. Пусть λ j ( x ) будет линейной функцией настройки нейрона j, которая дает вероятность того, что пересечение порога является спайком от нейрона j (в отличие от других нейронов или шума), учитывая кинематику. Пусть τ ( x ) будет долей пересечений порога, которые являются реальными выбросами, а не шумом.Отметим, что τ (x) = ∑jλj (x). Пусть π j ( x ) будет вероятностью того, что любой реальный всплеск произведен нейроном j, учитывая кинематику x . Таким образом, π j ( x ) = λ j ( x ) / τ ( x ) и ∑jπj (x) = 1.
Пусть μjp — вектор p-х моментов характеристик формы волны для нейрона j. Например, если у нас есть одна характеристика, амплитуда спайка, то μj1 — это средняя амплитуда спайка нейрона j. Пусть λ j ( x ) будет линейной функцией настройки нейрона j, которая дает вероятность того, что пересечение порога является спайком от нейрона j (в отличие от других нейронов или шума), учитывая кинематику. Пусть τ ( x ) будет долей пересечений порога, которые являются реальными выбросами, а не шумом.Отметим, что τ (x) = ∑jλj (x). Пусть π j ( x ) будет вероятностью того, что любой реальный всплеск произведен нейроном j, учитывая кинематику x . Таким образом, π j ( x ) = λ j ( x ) / τ ( x ) и ∑jπj (x) = 1.
Теперь пусть W будет векторной случайной величиной, представляющей значения характеристик новой формы сигнала пересечения порога. Вентура и Тодорова показывают, что p-й момент Вт может быть выражен как линейная функция p-го момента характеристик для каждого нейрона и p-го момента характеристик шума:
Вентура и Тодорова показывают, что p-й момент Вт может быть выражен как линейная функция p-го момента характеристик для каждого нейрона и p-го момента характеристик шума:
Здесь w0p — вектор p-х моментов характеристик шума, который Вентура и Тодорова полагают равным нулю. Мы можем удовлетворить это предположение с помощью проектирования функций, но мы также увидим в следующем уравнении, что обработка ненулевого w0p выполняется во время подбора параметров. Поскольку λ j ( x ) предполагается линейным в x , а μjp не изменяется при x , произведение λj (x) (μjp-w0p) также линейно при x .Таким образом, мы можем записать выборочные моменты во временном интервале t как (Вентура и Тодорова, уравнение 2.9):
Wtp¯ = γ0p + GPxt + δtp. (4) Здесь Wtp¯ — это исходный момент p-го отсчета характеристик сигнала во временном интервале t. x t — вектор кинематики в момент времени t. γ0p и G P представляют собой вектор и матрицу коэффициентов, соответственно, для аппроксимации с помощью линейной регрессии. Подгонка γ0p и G P учитывает любой ненулевой член w0p.δtp — вектор невязки. Эта форма аналогична форме моделей кодирования, используемых в декодерах фильтров Калмана. В этих моделях левая часть обычно представляет собой отсортированное количество пиков (наблюдения декодера фильтра Калмана). В структуре декодирования моментов характеристик сигналов используются моменты характеристик сигналов, а также количество пересечений пороговых значений в качестве наблюдений декодера фильтра Калмана. Характеристики формы сигналов различных каналов включены в отдельные наблюдения. Например, для 100 каналов и одного признака сигнала с тремя моментами общее количество моментов признака сигнала составляет 300.В сумме со 100 пересечениями порога общее количество наблюдений составляет 400.
x t — вектор кинематики в момент времени t. γ0p и G P представляют собой вектор и матрицу коэффициентов, соответственно, для аппроксимации с помощью линейной регрессии. Подгонка γ0p и G P учитывает любой ненулевой член w0p.δtp — вектор невязки. Эта форма аналогична форме моделей кодирования, используемых в декодерах фильтров Калмана. В этих моделях левая часть обычно представляет собой отсортированное количество пиков (наблюдения декодера фильтра Калмана). В структуре декодирования моментов характеристик сигналов используются моменты характеристик сигналов, а также количество пересечений пороговых значений в качестве наблюдений декодера фильтра Калмана. Характеристики формы сигналов различных каналов включены в отдельные наблюдения. Например, для 100 каналов и одного признака сигнала с тремя моментами общее количество моментов признака сигнала составляет 300.В сумме со 100 пересечениями порога общее количество наблюдений составляет 400.
Умножая обе части уравнения (4) слева на псевдообратную величину G P , ( G P ) + , мы можем изменить уравнение к форме, аналогичной модели фильтра Винера, показывая что мы также можем использовать моменты характеристик формы волны в качестве входных данных для фильтра Винера:
γ′0p + (GP) + Wtp¯ + δ′tp = xt. (5)Здесь γ′0p = — (GP) + γ0p и δ′tp = — (GP) + δtp — новые постоянные векторы и остаточные векторы, соответственно.На практике мы подбираем коэффициенты путем регрессии линейной модели с Wtp¯ в качестве предиктора и x t в качестве целевых значений вместо использования ( G P ) + в качестве коэффициентов.
Сумма характеристик сигналов
Отметим, что суммы p-й степени признаков также могут быть выражены аналогично p-м моментам Вт (как в уравнении 3):
∑WtP = atw0p + [∑j = 1Kcj (x) (μjp − w0p)] + ϵtp, (6), где c j ( x ) — ожидаемое количество импульсов нейрона j во временном интервале как функция кинематики x , т. е.е., функция настройки, а ϵtp — вектор невязки, который мы предполагаем нормально распределенным. Мы получаем Уравнение (6) из Уравнения (3), умножая обе части на количество пересечений порога. Как Вентура и Тодорова, мы предполагаем, что w0p = 0. Это предположение можно рассматривать как допущение, что отсутствуют формы шумовых сигналов: каждое предполагаемое превышение порога является всплеском. Это предположение не приводит к проблемам со стационарным шумом, потому что любой такой шум можно смоделировать как единицу с нулевой настройкой.Предполагая, что cj (x) (μjp — w0p) является линейной функцией x , мы видим, что уравнение (6) имеет форму, аналогичную уравнению (4), что позволяет аналогичным образом использовать суммы характеристик формы сигнала в качестве моментов характеристик формы сигнала в Фильтр Калмана и фильтр Винера.
е.е., функция настройки, а ϵtp — вектор невязки, который мы предполагаем нормально распределенным. Мы получаем Уравнение (6) из Уравнения (3), умножая обе части на количество пересечений порога. Как Вентура и Тодорова, мы предполагаем, что w0p = 0. Это предположение можно рассматривать как допущение, что отсутствуют формы шумовых сигналов: каждое предполагаемое превышение порога является всплеском. Это предположение не приводит к проблемам со стационарным шумом, потому что любой такой шум можно смоделировать как единицу с нулевой настройкой.Предполагая, что cj (x) (μjp — w0p) является линейной функцией x , мы видим, что уравнение (6) имеет форму, аналогичную уравнению (4), что позволяет аналогичным образом использовать суммы характеристик формы сигнала в качестве моментов характеристик формы сигнала в Фильтр Калмана и фильтр Винера.
Преимущество использования суммированного подхода состоит в том, что сумма естественным образом увеличивается с количеством пиков в ячейке, и поэтому ее можно использовать отдельно, без увеличения счетчиков пересечений порога, в качестве входных данных для декодеров. Мы обсуждаем другие преимущества суммированного подхода в разделе «Момент vs.Итог в Обсуждении.
Мы обсуждаем другие преимущества суммированного подхода в разделе «Момент vs.Итог в Обсуждении.
Характеристики
В этом исследовании мы протестировали несколько простых функций сигналов для использования в структуре декодирования функций сигналов. Хотя можно использовать сложные функции, такие как отличие от шаблона формы сигнала, мы хотели избежать функций, требующих больших вычислений. Мы использовали следующие возможности:
F1: амплитуда выброса, т. Е. Разница напряжений между пиком и минимумом.
F2: Время от пика до минимума, то есть разница во времени между пиком и впадиной (также называемая шириной пика).
F3: Минимум напряжения сигнала.
F4: Пиковое значение, то есть максимальное напряжение сигнала.
Если в интервале времени не регистрируются всплески, значения функций устанавливаются на ноль (например, Вентура и Тодорова). За исключением функции F4, остальные аналогичны функциям, выбранным Вентурой и Тодоровой. Мы сравнили различные функции, используемые по очереди, а также с первыми тремя функциями вместе, как в Ventura и Todorova.
Методы сравнения
Для основного анализа общей точности декодирования в автономном режиме с использованием функций сигналов мы сравнили следующие методы предварительной обработки данных о выбросах:
F * _moment + TC : Первые три момента (без перекрестных моментов) признаков, объединенные (путем конкатенации) с количеством пересечений порога.Звездочка * указывает, какие функции используются, например, F123_moment использует функции F1, F2 и F3. Это метод, предложенный Вентурой и Тодоровой. Общее количество входов декодера на канал составляет M · 3 + 1, где M — количество характеристик формы сигнала.
F * _moment : Аналогично F * _moment + TC, но без счетчика пересечений порога. Этот подход к предварительной обработке не был предложен Вентурой и Тодоровой и не ожидается, что он будет успешным, потому что моменты не отражают непосредственно мгновенную скорость стрельбы, но мы включаем его для полноты сравнения. Общее количество входов на канал M · 3.
Общее количество входов на канал M · 3.
F * _sum : Суммы характеристик, суммы их квадратов и суммы их кубов. Это предлагаемый нами метод. Общее количество входов на канал M · 3.
F * _sum + TC : Подобно F * _sum, но дополнено счетчиками пересечения порога (путем конкатенации). Мы считаем, что количество пересечений порога является избыточным при использовании сумм, но мы включаем этот метод для полноты сравнений.Общее количество входов на канал M · 3 + 1.
Сортировано : Подсчет спайков в результате сортировки спайков путем сопоставления с шаблоном суммы квадратов разностей с использованием шаблонов, созданных экспериментатором. Сортировка спайков в режиме онлайн с использованием этих шаблонов выполнялась записывающей системой Omniplex. Хеши не включены. Общее количество входов на канал равно K, где K — количество единиц, определенное экспериментатором.
Переход через порог (TC) : Подсчет всех переходов через порог.Общее количество входов на канал — 1.
Sorted + hash : Аналогично Sorted, за исключением того, что количество предполагаемых сигналов, не соответствующих ни одному шаблону, включается (путем конкатенации) как несколько единиц. Общее количество входов на канал K + 1.
Объединено : отсортированные счетчики пиковых значений объединены вместе, отменяя сортировку пиковых значений, но не включая хэш. Это можно рассматривать как количество пересечений порога без хеширования. Общее количество входов на канал — 1.
Блок-схема, изображающая этапы обработки сигналов для методов, которые мы тестировали, показана на рисунке 1A.На рисунке 1B показан процесс вычисления суммы амплитуд (F1) сигналов до 3-го порядка для одного канала за один временной интервал. Полный вектор наблюдения для декодера фильтра Калмана в одном временном интервале будет состоять из трех чисел в прямоугольниках, рассчитанных отдельно для каждого канала. По умолчанию мы устанавливаем количество моментов или порядок возведения в степень (максимальное значение p) равным трем, без использования перекрестных моментов для вычисления моментов. Однако мы также исследуем эффект изменения порядка возведения в степень.
По умолчанию мы устанавливаем количество моментов или порядок возведения в степень (максимальное значение p) равным трем, без использования перекрестных моментов для вычисления моментов. Однако мы также исследуем эффект изменения порядка возведения в степень.
Рисунок 1. (A) Блок-схема обработки сигнала. (B) Пример вычисления суммы амплитуды сигнала до 3-го порядка для одного канала и одного временного интервала. Входы в декодер обозначены синими прямоугольниками. Перед вводом в декодер значения нормализуются к единичной дисперсии. (C) Иллюстрация настройки сбора данных. Обезьяна-резус управляла курсором с помощью джойстика в правой руке, чтобы выполнить задачу по достижению центра. Внеклеточные сигналы регистрировали от левой первичной моторной коры с использованием имплантированной 96-канальной кремниевой электродной решетки штата Юта.
Для сравнения методов мы использовали их в сочетании со стандартными декодерами для автономных реконструкций ранее записанных данных. То есть мы декодируем ранее записанную нейронную активность, собранную, когда обезьяны двигали руками, в намерения движения и оцениваем методы по тому, насколько хорошо декодированные движения соответствуют фактическим записанным движениям рук. Мы используем два стандартных полевых декодера. Во-первых, это фильтр Калмана (Wu et al., 2006) с нулевым временным сдвигом между нейронными данными и кинематикой.Этот декодер использовал стандартную линейную модель кодирования, в которой положение и скорость руки (в двух измерениях каждая) являются кинематическими переменными. Во-вторых, мы используем фильтр Винера с 3 отводами (Carmena et al., 2003) для декодирования положения и скорости. Мы использовали небольшое количество кранов, чтобы снизить риск чрезмерной подгонки. Оба фильтра использовали интервалы 100 мс, и моменты или суммы признаков были вычислены с тем же размером интервала. Все входные данные в декодеры были нормализованы до нулевого среднего и единичной дисперсии. Для функций формы волны это происходит после вычисления суммы или момента.
То есть мы декодируем ранее записанную нейронную активность, собранную, когда обезьяны двигали руками, в намерения движения и оцениваем методы по тому, насколько хорошо декодированные движения соответствуют фактическим записанным движениям рук. Мы используем два стандартных полевых декодера. Во-первых, это фильтр Калмана (Wu et al., 2006) с нулевым временным сдвигом между нейронными данными и кинематикой.Этот декодер использовал стандартную линейную модель кодирования, в которой положение и скорость руки (в двух измерениях каждая) являются кинематическими переменными. Во-вторых, мы используем фильтр Винера с 3 отводами (Carmena et al., 2003) для декодирования положения и скорости. Мы использовали небольшое количество кранов, чтобы снизить риск чрезмерной подгонки. Оба фильтра использовали интервалы 100 мс, и моменты или суммы признаков были вычислены с тем же размером интервала. Все входные данные в декодеры были нормализованы до нулевого среднего и единичной дисперсии. Для функций формы волны это происходит после вычисления суммы или момента. Среднее значение и дисперсия, необходимые для нормализации, были вычислены по всем ячейкам обучающих данных.
Среднее значение и дисперсия, необходимые для нормализации, были вычислены по всем ячейкам обучающих данных.
Операции на животных и эксперименты
Нейронные и кинематические данные были собраны у двух взрослых самцов макак-резусов ( Macaca mulatta ), каждой из которых был имплантирован один 96-канальный кремниевый электродный массив штата Юта (Blackrock Microsystems) в левой первичной моторной коре над рукой и в областях представления кисти (Li et al. ., 2016). Все хирургические процедуры соответствовали Руководству Национального института здравоохранения по уходу и использованию лабораторных животных и были одобрены Комитетом по уходу и использованию животных в Пекинском педагогическом университете.Операция проводилась в стерильных условиях в соответствии со стандартными процедурами имплантации массива Юты. Массивы имплантировали на ~ 4 мм кпереди от центральной борозды, на ~ 15 мм слева от средней линии. Набор из Юты для обезьяны B (11 кг, возраст 6 лет) имел электроды длиной 1,0 мм, в то время как набор из штата Юта для обезьяны M (8 кг, возраст 4 года) имел электроды длиной 1,5 мм. Для получения дополнительной информации см. Li et al. (2016).
Для получения дополнительной информации см. Li et al. (2016).
Обезьяны были обучены выполнять задачу достижения центра на экране компьютера, используя правую руку для управления курсором компьютера с помощью джойстика (рис. 1C).Положение джойстика линейно сопоставлено с положением курсора. Поведенческая задача заключалась в чередовании движений курсора к центральной и периферийной мишеням (диаметром 5 см). Периферийные цели появлялись в случайных местах на одинаковом расстоянии от центрального целевого местоположения (радиус варьируется в зависимости от сеанса, 8–10 см). Центр курсора должен был удерживаться в пределах цели в течение времени удержания (500 мс), чтобы успешно завершить испытание. Логика задания, сбор кинематических данных и экспериментальный контроль выполнялись с помощью специального программного обеспечения (BMI3, любезно предоставлено лабораторией Nicolelis, Университет Дьюка).
Нейронные сигналы были записаны с использованием 128-канальной системы записи Omniplex (Plexon Inc. ) в электромагнитно-экранированной комнате. Сигналы усиливались (до 8000 раз), оцифровывались (16 бит, 40 кГц) и обрабатывались онлайн системой Omniplex перед отправкой на компьютер для сбора данных. Эта обработка включала обнаружение пиков на основе пороговых значений (пороговое значение, установленное экспериментатором с целью максимального увеличения количества отсортированных единиц, включая многоэлементы, средние пороги, указанные в разделе «Сортировка пиков» в результатах) и сортировку пиков с использованием шаблонов, созданных экспериментатором.Как хорошо изолированные одиночные единицы, так и многокомпонентные были отсортированы и использовались без различия. Метки единиц из сортировки пиков использовались или игнорировались, в зависимости от метода, в нашем автономном анализе. Мы агрессивно сортируем по пикам, предпочитая разделять группы сигналов на большее количество единиц, когда выбор не был очевиден.
) в электромагнитно-экранированной комнате. Сигналы усиливались (до 8000 раз), оцифровывались (16 бит, 40 кГц) и обрабатывались онлайн системой Omniplex перед отправкой на компьютер для сбора данных. Эта обработка включала обнаружение пиков на основе пороговых значений (пороговое значение, установленное экспериментатором с целью максимального увеличения количества отсортированных единиц, включая многоэлементы, средние пороги, указанные в разделе «Сортировка пиков» в результатах) и сортировку пиков с использованием шаблонов, созданных экспериментатором.Как хорошо изолированные одиночные единицы, так и многокомпонентные были отсортированы и использовались без различия. Метки единиц из сортировки пиков использовались или игнорировались, в зависимости от метода, в нашем автономном анализе. Мы агрессивно сортируем по пикам, предпочитая разделять группы сигналов на большее количество единиц, когда выбор не был очевиден.
Методы анализа
Все расшифровки и анализ мы проводили офлайн. Чтобы реконструировать двигательную активность, мы разделили нейронные и кинематические данные на обучающую и тестовую части и выполнили перекрестную проверку.Для реконструкций фильтра Калмана мы использовали семь сверток, а для реконструкций фильтра Винера мы использовали две свертки из-за вычислительных затрат на подгонку фильтра. Мы подобрали параметры фильтров Калмана или Винера, используя обычную линейную регрессию методом наименьших квадратов (МНК). Мы выбрали OLS, потому что не хотели, чтобы на тенденции производительности влияла настройка параметров регуляризации. Кроме того, мы считаем, что метод наименьших квадратов является справедливым, потому что он имеет встроенный штраф для методов с большим количеством функций (из-за чрезмерной подгонки).Идеальная процедура подбора параметров, основанная на разреженности или регуляризациях, может решить, какие функции являются релевантными, но тогда оптимальной стратегией для повышения точности было бы бросить все мыслимые функции в декодер.
Чтобы реконструировать двигательную активность, мы разделили нейронные и кинематические данные на обучающую и тестовую части и выполнили перекрестную проверку.Для реконструкций фильтра Калмана мы использовали семь сверток, а для реконструкций фильтра Винера мы использовали две свертки из-за вычислительных затрат на подгонку фильтра. Мы подобрали параметры фильтров Калмана или Винера, используя обычную линейную регрессию методом наименьших квадратов (МНК). Мы выбрали OLS, потому что не хотели, чтобы на тенденции производительности влияла настройка параметров регуляризации. Кроме того, мы считаем, что метод наименьших квадратов является справедливым, потому что он имеет встроенный штраф для методов с большим количеством функций (из-за чрезмерной подгонки).Идеальная процедура подбора параметров, основанная на разреженности или регуляризациях, может решить, какие функции являются релевантными, но тогда оптимальной стратегией для повышения точности было бы бросить все мыслимые функции в декодер. Такой способ анализа не даст нам информативных результатов о сравнении функций и методов.
Такой способ анализа не даст нам информативных результатов о сравнении функций и методов.
Точность реконструкций измерялась с использованием в основном двух показателей: коэффициента корреляции Пирсона и отношения сигнал / шум декодирования. Коэффициент корреляции был рассчитан между восстановленным временным рядом положения или скорости движения руки (по каждой оси отдельно) и фактическим временным рядом положения или скорости движения руки, записанным джойстиком.Затем были усреднены корреляции по двум осям. Отношение сигнал / шум было вычислено с использованием этого уравнения:
SNRdecoding = 10 · log10 (∑t (jt − j¯) 2∑t (jt − rt) 2), (7), где j t — положение или скорость джойстика по одной оси в момент времени t, j¯ — среднее значение, r t — восстановленное значение во время t, а SNR декодирования выражается в децибелах (дБ). Затем были усреднены отношения сигнал / шум по двум осям. Мы включаем SNR вместе с традиционным коэффициентом корреляции, поскольку он измеряет ошибки в масштабе и смещении и не насыщает. Его можно рассматривать как нормализованную обратную величину среднеквадратичной ошибки с логарифмическим преобразованием. Мы также использовали среднеквадратичную ошибку в одном анализе, чтобы получить тот же показатель, что и у Вентуры и Тодорова. Мы усредняем результаты перекрестной проверки для одного значения точности за сеанс записи.
Его можно рассматривать как нормализованную обратную величину среднеквадратичной ошибки с логарифмическим преобразованием. Мы также использовали среднеквадратичную ошибку в одном анализе, чтобы получить тот же показатель, что и у Вентуры и Тодорова. Мы усредняем результаты перекрестной проверки для одного значения точности за сеанс записи.
Для количественной оценки качества кортикальных записей мы вычислили отношение сигнал / шум записи, которое измеряет размер всплесков по сравнению с размером фонового шума:
SNRзапись = 20 · log10 (PSD), (8), где P — средняя высота от пика до минимума пиковых сигналов, отсортированных по каналу, SD — это стандартное отклонение шума на канале (когда скачки отсутствуют), а SNR при записи выражается в децибелах (дБ). .Мы рассчитываем SNR записи как среднее значение по каналам для каждого сеанса.
Мы проверили достоверность различий с помощью парных двусторонних критериев знаков с уровнем значимости α = 0,05. В большей части анализа пары сравниваемых методов были заранее запланированы, но в исследовательском анализе мы использовали поправку на множественные сравнения: метод Холма-Бонферрони. Мы вычислили до 16 чисел или измерений для каждого метода обработки спайков (2 обезьяны × 2 фильтра {Калмана, Винера} × 2 переменных {положение, скорость} × 2 показателя {CC, SNR , декодирование }), которые можно рассматривать как 16 экспериментов.Все эти измерения сведены в таблицу для полноты. Для некоторых анализов мы вычислили только подмножество этих измерений ради скорости. Тенденции в измерениях в целом совпадали, без каких-либо интересных отклонений. В разделе результатов и на рисунках мы показываем коэффициент корреляции реконструкций скорости фильтром Калмана. Мы делаем это, чтобы уменьшить беспорядок и сфокусировать анализ. Эти числа представляли тенденции во всех измерениях, и в этой области обычно используются фильтр Калмана «положение-скорость», управление скоростью и оценка по коэффициенту корреляции.
Мы вычислили до 16 чисел или измерений для каждого метода обработки спайков (2 обезьяны × 2 фильтра {Калмана, Винера} × 2 переменных {положение, скорость} × 2 показателя {CC, SNR , декодирование }), которые можно рассматривать как 16 экспериментов.Все эти измерения сведены в таблицу для полноты. Для некоторых анализов мы вычислили только подмножество этих измерений ради скорости. Тенденции в измерениях в целом совпадали, без каких-либо интересных отклонений. В разделе результатов и на рисунках мы показываем коэффициент корреляции реконструкций скорости фильтром Калмана. Мы делаем это, чтобы уменьшить беспорядок и сфокусировать анализ. Эти числа представляли тенденции во всех измерениях, и в этой области обычно используются фильтр Калмана «положение-скорость», управление скоростью и оценка по коэффициенту корреляции.
Мы проанализировали данные 47 сеансов записи от обезьяны B и 28 сеансов записи от обезьяны M, выбранных из всех доступных данных по критериям: (1) отсутствие большого шума записи или артефактов, (2) даты записи примерно равны — промежутки времени между ними с целью выборки диапазона качества записи. Данные, использованные для сеансов, варьировались от 5,46 до 8,33 мин (среднее значение 8,24). Что касается испытаний центральной задачи, проанализированные данные включали 131–199 испытаний (в среднем 197).Данные от обезьяны B собирали через 10–184 дня после имплантации, а данные от обезьяны M собирали через 15–168 дней после имплантации.
Данные, использованные для сеансов, варьировались от 5,46 до 8,33 мин (среднее значение 8,24). Что касается испытаний центральной задачи, проанализированные данные включали 131–199 испытаний (в среднем 197).Данные от обезьяны B собирали через 10–184 дня после имплантации, а данные от обезьяны M собирали через 15–168 дней после имплантации.
Результаты
Мы вычислили точность автономной реконструкции для двух обезьян, для фильтров Калмана и Винера, для положения и скорости, с использованием коэффициента корреляции и отношения сигнал / шум в качестве показателей, всего 16 средних значений для каждого метода. Результаты представлены в таблице 1 как среднее ± стандартная ошибка среднего. В приведенных ниже результатах мы фокусируемся на точности восстановления скорости фильтра Калмана, измеренной с помощью корреляции, поскольку это широко используемый подход к декодированию.Тенденции в других измерениях были аналогичными.
Таблица 1 . Среднее ± SEM точности декодирования.
Сумма амплитуды сигнала
В этом исследовании мы хотели собрать больше данных о потенциальной эффективности использования функций формы волны для моторного декодирования в качестве альтернативной парадигмы для интерфейсов мозг-машина. Мы также хотели сравнить предлагаемую нами модификацию использования сумм признаков вместо моментов. Мы ожидали, что декодирование характеристик сигнала не будет существенно отличаться от декодирования по отсортированному количеству пиков, что согласуется с результатами Вентуры и Тодорова (2015).
На рис. 2А показана точность восстановления скорости фильтра Калмана, измеренная по корреляции при использовании отсортированных подсчетов пиков (отсортированных), пересечений пороговых значений (TC) и суммы характеристики амплитуды сигнала (F1_sum) в качестве предварительной обработки. В этом измерении F1_sum имел среднее значение r 0,767, 0,785 (обезьяна B, M), отсортированное имело среднее значение r 0,744, 0,738 и TC имело средние значения r- 0,746, 0,776. Средняя корреляция (по всем показателям с использованием корреляции) и среднее отношение сигнал / шум (по всем показателям с использованием отношения сигнал / шум) приведены в нижней части таблицы 1.Мы были удивлены, обнаружив, что использование сумм амплитуд сигналов для декодирования на самом деле привело к значительно более высокой корреляции, чем при использовании отсортированных подсчетов пиков или пересечений пороговых значений (значения P в дополнительной таблице A), даже несмотря на то, что величины различий были небольшими.
Средняя корреляция (по всем показателям с использованием корреляции) и среднее отношение сигнал / шум (по всем показателям с использованием отношения сигнал / шум) приведены в нижней части таблицы 1.Мы были удивлены, обнаружив, что использование сумм амплитуд сигналов для декодирования на самом деле привело к значительно более высокой корреляции, чем при использовании отсортированных подсчетов пиков или пересечений пороговых значений (значения P в дополнительной таблице A), даже несмотря на то, что величины различий были небольшими.
Рисунок 2. (A) Сравнение точности автономной реконструкции суммы амплитуд (F1_sum) с традиционными методами. Построены корреляции реконструкций скорости с помощью фильтра Калмана.Планки погрешностей указывают ± SEM. (B) Различия в точности между подсчетом F1_sum и отсортированными спайками регрессировали по отношению сигнал / шум записей, показывая относительную чувствительность производительности F1_sum к качеству записи. Каждая точка данных — это сеанс. Линия лучше всего соответствует линейному тренду. Показана обезьяна B. (C) То же для обезьяны М. ** p <0,001; *** р <0,0001.
Каждая точка данных — это сеанс. Линия лучше всего соответствует линейному тренду. Показана обезьяна B. (C) То же для обезьяны М. ** p <0,001; *** р <0,0001.
Нам было любопытно, было ли декодирование признаков формы сигнала менее устойчивым к ухудшению качества записи по сравнению с декодированием из отсортированных единиц.Мы регрессировали (F1_sum — отсортировано) в качестве зависимой переменной по сравнению с качеством записи (отношение сигнал / шум записи) в качестве независимой переменной. Корреляции были номинально положительными, но не значимыми (обезьяна B: p = 0,0669, наклон = 0,0088, R 2 = 0,0727; обезьяна M: p = 0,322, наклон = 0,0021, R 2 = 0,0377; рисунки 2Б, В). Это говорит о том, что сумма амплитуд не более чувствительна к качеству записи, чем сортировка спайков на основе шаблонов.
Сравнение с предыдущими работами
Мы сравнили использование моментов характеристик сигнала (дополненных счетчиком пересечения порога) с использованием сумм характеристик сигнала (рис. 3A, p — значения в дополнительных таблицах B, C). Декодирование с использованием F123_sum привело к значительно более высокой корреляции по сравнению с декодированием с использованием F123_moment + TC. Декодирование с использованием F1_sum (сумма амплитуд) привело к значительно более высокой корреляции по сравнению с декодированием с использованием F1_moment + TC. Хотя различия были значительными, масштабы различий были небольшими.
Рис. 3. (A) Сравнение точности восстановления в автономном режиме между моментом и суммой. Построены корреляции реконструкций скорости с помощью фильтра Калмана. Планки погрешностей указывают ± SEM. (B) Для сравнения с Вентурой и Тодоровой точность также измерялась среднеквадратичной ошибкой. Чем меньше значения, тем лучше. * p <0,05; ** р <0,001; *** р <0,0001.
Мы провели дальнейший анализ только с амплитудной характеристикой.Чтобы использовать те же метрики, что и Вентура и Тодорова (2015), мы вычислили среднеквадратичную ошибку (MSE) для скорости, декодированной фильтром Калмана. Наше условие F1_moment + TC такое же, как и в их модели 1. Точность восстановления в MSE, эффективность относительно TC, т. Е. MSE (TC) / MSE (*) и CC приведены в таблице 2, а значения MSE представлены в Рисунок 3B. Тестирование значимости (значения p в дополнительной таблице C) показало, что F1_moment + TC был значительно лучше, чем сортировка и пересечение порога, как для корреляции, так и для измерений MSE (в соответствии с их результатами).Тестирование также показало, что F1_sum был значительно лучше, чем сортировка и пересечение порога как для показателей корреляции, так и для показателей MSE. F1_sum был значительно лучше, чем F1_moment + TC в измерении MSE.
Таблица 2 . Сравнение с предыдущей работой.
Сравнение функций
Затем мы сравнили четыре характеристики формы сигнала в рамках парадигмы суммы. Каждая функция и ее мощности до 3-го порядка суммировались и использовались без пересчета пороговых значений. Таблица 3 и Рисунок 4A показывают точность восстановления.Для этого анализа мы сравнили только положение фильтра Калмана и точность восстановления скорости, измеренную с помощью коэффициента корреляции, и построили только результаты по скорости.
Таблица 3 . Среднее ± SEM точности декодирования при использовании различных функций.
Рис. 4. (A) Сравнение характеристик формы сигнала при суммировании. Построены корреляции реконструкций скорости с помощью фильтра Калмана. Планки погрешностей указывают ± SEM. (B) Сравнение порядков (степень для возведения в степень значения признаков) сумм. (C) Сравнение исходных и центральных моментов. * p <0,05; ** р <0,001; *** р <0,0001.
Характеристики, ранжированные по средней корреляции (среднее положение и скорость), от лучшего к худшему, были: (1) амплитуда (F1_sum), (2) пиковое напряжение (F4_sum), (3) минимальное напряжение (F3_sum) и ( 4) время от пика до минимума (F2_sum). Результаты тестирования значимости и значения p , скорректированные с использованием метода Холма-Бонферрони, приведены в дополнительной таблице D.Амплитуда (F1) была значительно лучше, чем время от пика до минимума (F2), от минимума (F3) и от пика (F4), но в целом различия были небольшими.
Порядок возведения в степень
Затем мы сравнили характеристики сигналов в разных порядках (p). Мы возводили признаки в первую, вторую, третью или четвертую степень перед суммированием, аналогично использованию первого, двух, трех или четырех моментов. Обратите внимание, что условие 2-го порядка включает признаки, возведенные в 1-ю степень; условие 3-го порядка включает признаки, возведенные в 1-ю и 2-ю степень, и так далее.Для этого анализа мы использовали функции F1 (амплитуда), F2 (ширина выступа) и F3 (впадина). Таблица 4 показывает результирующее положение фильтра Калмана и точность восстановления скорости, измеренную с помощью коэффициента корреляции, а на рисунке 4B показаны графики точности скорости.
Таблица 4 . Среднее значение ± SEM точности декодирования при возведении в степень признаков F1, F2 и F3 до различных порядков и суммировании.
Точность была очень похожей среди заказов. Ранжирование средней корреляции (среднее положение и скорость) от лучшего к худшему было: (1) 2-й порядок, (2) 4-й порядок, (3) 1-й порядок и (4) 3-й порядок.Результаты проверки значимости с поправкой Холма-Бонферрони и значения p приведены в дополнительной таблице E.
Сырые и центральные моменты
Вентура и Тодорова использовали сырые моменты в своем дизайне (выше анализируются все использованные сырые моменты). Нам было любопытно, может ли использование центральных моментов вместо исходных моментов улучшить характеристики моментов сигнала. Чтобы быть конкретным, при вычислении сырых моментов сначала не вычитается среднее значение:
, где p — порядок момента.При вычислении центральных моментов (порядка 2 и выше) сначала вычитается среднее значение:
centralp = E [(W-E [W]) p]. (10)Чтобы избежать присвоения декодеру значений мусора, для центрального момента 1-го порядка мы использовали необработанный момент 1-го порядка. Мы сравнили исходные и центральные моменты характеристик F1 (амплитуда), F2 (ширина выступа) и F3 (впадина) порядка 3, без перекрестных моментов, и как с учетом, так и без учета количества пересечений порога. Положение фильтра Калмана и точность восстановления скорости, измеренная с помощью корреляции, сведены в таблицу в таблице 5, а значения корреляции восстановления скорости представлены на рисунке 4C.
Таблица 5 . Среднее ± SEM точности декодирования, сравнение исходных и центральных моментов.
Тестирование значимости ( p -значения в дополнительной таблице F) показало, что исходные моменты без TC были значительно лучше, чем центральные моменты без TC, а необработанные моменты с TC были также значительно лучше, чем центральные моменты с TC.
Сортировка шипов
Мы сравнили декодирование с использованием отсортированных подсчетов пиков и несортированных подсчетов — давно назревший вопрос в этой области.Сортировка пиковых значений обычно отклоняет пересечения пороговых значений, которые не соответствуют ни одному шаблону или критериям модуля. Однако, поскольку эти хэш-формы сигналов могут быть многокомпонентными или однокомпонентными сигналами, загрязненными шумом, они потенциально могут помочь при декодировании. Тодорова и др. (2014) обнаружили, что включение (конкатенация) счетчика этого хэша улучшает точность декодирования отсортированных счетчиков пиков. Мы отмечаем, что при сравнении отсортированных подсчетов спайков без пересечений хэша и пороговых значений сравнивается не только полезность сортировки спайков, поскольку хэш включается в пересечения пороговых значений, но не в отсортированные подсчеты спайков.Таким образом, чтобы правильно оценить преимущества сортировки спайков, мы сравниваем отсортированное количество спайков с пересечениями хэшей и пороговых значений. Мы также сравниваем отсортированное количество пиков (без хеша) с «объединенным» условием, полученным путем объединения единиц, разделенных сортировкой по пикам, что эквивалентно пересечению порогового значения, которое не включает хеш.
На рисунке 5 показаны результаты восстановления скорости фильтра Калмана, измеренные с помощью корреляции, а в таблице 1 показаны все измерения. Тестирование значимости (значения p в дополнительной таблице G) показало, что сортированный + хэш был во всех 16 измерениях значительно лучше, чем пересечение порога.Кроме того, сортировка по всем 16 показателям была значительно лучше, чем объединенная.
Рисунок 5 . Сравнение отсортированного и несортированного. Построены корреляции реконструкций скорости с помощью фильтра Калмана. Планки погрешностей указывают ± SEM. Хеширование — это формы волны, которые не соответствуют ни одному шаблону единиц измерения. Условие слияния — это отсортированное количество всплесков с объединенными обратно единицами, что эквивалентно количеству пересечений порога без хеширования. *** р <0,0001.
В (по нашему мнению, нечетком) сравнении сортировки и пересечения порога 8 из 16 сравнений существенно различались (в пользу пересечения порога), в то время как другие существенно не различались.Все сравнения, которые были значимыми, были получены от обезьяны M, и ни одно из сравнений с обезьяной B не было значимым. Длина электродов двух обезьян была разной, и разные экспериментаторы собирали данные, устанавливали пороговые значения и делали шаблоны для сортировки шипов. Средние (по сеансам и каналам) пороги обнаружения спайков в наших данных составляли -2,84 ± 0,22 и -2,77 ± 0,50 стандартного отклонения шума для обезьяны B и обезьяны M, соответственно. Среднее (по сеансам и каналам) отношение сигнал / шум наших записей составило 16.0 ± 0,92 и 15,2 ± 2,6 дБ для обезьяны B и обезьяны M соответственно. Знаки ± указывают на стандартное отклонение между сеансами.
Хотя это и не является основной целью нашего исследования, мы обнаружили, что сортировка + хеш по всем параметрам была значительно лучше, чем сортировка, повторяя Todorova et al. (2014). Пересечение порога по всем параметрам было значительно лучше, чем при слиянии. Эти два результата показывают, что полезная информация в хэше была более полезной, чем пагубное влияние шума в хэше в наших записях и для наших пороговых значений.
Анализ при более строгом пороге обнаружения пиков
Мы хотели знать, в какой степени наши результаты обобщаются для более строгого порога обнаружения всплесков, поскольку наши средние пороги обнаружения всплесков были менее жесткими, чем обычно наблюдаемые в полевых условиях. Таким образом, мы повторили подмножество анализов, используя порог в -4,5 раза больше стандартного отклонения шума для всех каналов. Мы применили новый порог путем отбраковки шипов, которые не соответствовали пороговому значению. Ярлыки сортировки шипов, если применимо, не были изменены.Мы выполнили реконструкцию с помощью фильтра Калмана и измерили точность с точки зрения корреляции оценок скорости с фактическими скоростями.
Корреляция реконструкций представлена в таблице 6. По сравнению с реконструкциями при наших исходных пороговых значениях, все реконструкции при пороговых значениях -4,5 были значительно и существенно менее точными ( p -значения в дополнительной таблице H). При пороге -4,5 F1_sum все еще был значительно лучше, чем сортированный, но не лучше, чем сортированный + хэш и TC.Однако сравнение F1_sum при исходных пороговых значениях с sorted, sorted + hash и TC при пороговых значениях −4,5 показывает, что F1_sum был значительно лучше.
Таблица 6 . Среднее значение ± SEM точности декодирования при использовании -4,5 стандартного отклонения шума в качестве порога обнаружения пиков с точностью при исходных порогах, также приведенной для сравнения.
При пороговых значениях −4,5 F1_sum все еще значительно лучше, чем F1_moment + TC. Амплитуда по-прежнему оставалась лучшей характеристикой номинально с точки зрения корреляции, хотя некоторые результаты тестирования больше не были значимыми.
Что касается сравнения отсортированных и несортированных, то при пороговых значениях ниже -4,5 функция sorted + hash все еще была значительно лучше, чем TC, хотя сортировка не сильно отличалась от объединенной. Преимущество включения хэша по-прежнему было значительным.
Обсуждение
В этом исследовании мы предоставили больше экспериментальных данных для проверки подходов к декодированию характеристик сигналов. Мы предложили модификацию подхода моментов, который использует суммы, и показали, что он способствует небольшим, но значительным улучшениям в точности автономного декодирования.Мы показываем, что использование сумм амплитуд сигналов для декодирования в автономном режиме обеспечивает точность, которая значительно выше, чем отсортированное количество всплесков и количество пересечений порога. Мы сравниваем различные варианты выбора характеристик формы волны, разные значения порядка возведения в степень, а также исходные и центральные моменты. Наконец, мы представляем данные, сравнивающие использование отсортированных и несортированных подсчетов пиков, в которых контролируется наличие хэш-сигналов, и обнаруживаем, что отсортированные подсчеты пиков значительно лучше подходят для декодирования.
Сумма амплитуд сигналов
Наши результаты показали, что использование сумм амплитуды сигнала способствовало декодированию, которое было значительно более точным, чем отсортированные подсчеты спайков или подсчет пересечений пороговых значений, два широко используемых подхода для моторного декодирования. Если бы наши результаты не показали существенной разницы между этой новой парадигмой и традиционными методами, новый подход уже был бы жизнеспособной альтернативой традиционным методам (по причинам, которые мы обсудим ниже). Наши результаты с двумя декодерами, двумя выходными переменными, двумя метриками точности и двумя обезьянами показывают последовательное и значительное улучшение.Несмотря на то, что абсолютные улучшения были небольшими с точки зрения корреляции, с точки зрения отношения сигнал / шум точности декодирования, среднее улучшение 0,75 дБ по сравнению с отсортированными (см. Последнюю строку таблицы 1) и 0,41 дБ по сравнению с пересечениями порога соответствует до ~ 16% и 9% снижения среднеквадратичной ошибки соответственно, что является существенным улучшением. Несмотря на то, что пересечение пороговых значений и отсортированные пики с хешем были лучше, чем суммы амплитуды сигнала, когда обнаружение пиков выполнялось с порогами стандартного отклонения шума -4,5, суммы амплитуды сигнала при наших исходных порогах обнаружения пиков все же были лучше, чем оба этих метода с -4 .5, поэтому с точки зрения точности нет особых причин использовать традиционные методы с порогом -4,5.
Парадигма суммирования характеристик сигнала предлагает некоторые преимущества по сравнению с методом сортировки пиков: (1) не требуется устанавливать шаблоны или параметры сортировки, операция, которая требует значительного времени экспериментатора или сложных алгоритмов. (2) В зависимости от деталей алгоритма сортировки, особенности формы сигнала могут быть менее затратными в вычислительном отношении. Например, по сравнению с сопоставлением шаблонов по сумме квадратов разностей, которая составляет 3 · с · K + K операций с плавающей запятой на сигнал, где с — количество выборок на сигнал, а K — количество единиц, сумма амплитуд 2 · с операций на сигнал.(3) Вместо обновления параметров сортировки для отслеживания изменений формы сигнала или после обнаружения потери или появления нейронов, параметры декодера могут быть обновлены, чтобы фиксировать эти изменения, с использованием ранее опубликованных адаптивных методов (например, Li et al., 2011) . Этот подход объединяет обновления параметров сортировки пиков и параметров декодирования в одну операцию.
Одним из недостатков декодирования характеристик сигнала является то, что появление новых нейронов или их потерю невозможно обнаружить во время сортировки спайков и использовать в качестве триггеров для обновления параметров.Это может не иметь значения, если обновления параметров декодера происходят постоянно в фоновом режиме, независимо от нестабильности сортировки пиков. В качестве альтернативы для обнаружения таких изменений можно использовать отдельный процесс мониторинга с использованием сортировки пиков. Поскольку такой монитор не должен обрабатывать пики в реальном времени для декодирования, он может периодически работать в фоновом режиме, потребляя мало вычислительных ресурсов.
По сравнению с пересечениями пороговых значений, парадигма сумм характеристик формы сигнала не выполняется быстрее.Однако наша работа является довольно предварительной с точки зрения разработки этого подхода, поэтому есть много возможностей для улучшения, в то время как подход пересечения порога вряд ли будет улучшен в дальнейшем без увеличения сложности. С теоретической точки зрения использование только количества пересечений порога статистически неэффективно, поскольку информация о форме сигнала игнорируется (Ventura and Todorova, 2015).
Момент против. Сумма
Сравнение моментов + TC и сумм показывает, что суммы были значительно лучше, хотя величина различий была небольшой.Сравнение осталось прежним, когда использовались более строгие пороги обнаружения всплесков. Небольшие размеры различий означают, что практически разница между подходами по нашим данным была незначительной. Однако мы считаем, что у суммированного подхода есть некоторые теоретические преимущества.
Во-первых, использование сумм не требует включения количества пересечений порога. Это позволяет вводить декодеры меньшего размера и, таким образом, снижает риск чрезмерной подгонки. Во-вторых, поскольку подсчет пересечения порога не требуется, этот подход может быть расширен: суммы характеристик, вычисляемых непосредственно из кривых напряжения, без обнаружения всплесков.Это направление нашей будущей работы. В-третьих, мы считаем, что определение настроечных кривых в рамках системы сумм немного более интуитивно понятно. В рамках системы суммирования функции настройки выводят ожидаемое количество всплесков во временном интервале, что является классическим подходом к кодированию скорости. В рамках структуры моментов функции настройки выводят вероятность того, что обнаруженное пересечение порога происходит от рассматриваемого нейрона, то есть относительная активация. Небольшая неуклюжесть этого определения состоит в том, что эта вероятность зависит от активности других нейронов и количества шума на канале, так как вероятности должны быть суммированы до 1.
Сортировка шипов
Мы предоставляем данные по вопросу, представляющему интерес для сообщества интерфейсов мозг-машина: полезна ли сортировка спайков. Часто это делается как выбор между отсортированным подсчетом спайков (Вон, 2007; Смит и Панински, 2013; Тодорова и др., 2014; Перель и др., 2015; Вентура и Тодорова, 2015) или подсчетом пересечения порога. достаточно или даже лучше (Stark and Abeles, 2007; Ventura, 2008; Fraser et al., 2009; Chestek et al., 2011; Christie et al., 2015). Хотя мы считаем, что это неправильный вопрос, наши данные показывают, что отсортированное количество всплесков (без хеша) и количество пересечений порога в целом сопоставимы. Наши результаты различались между обезьянами (аналогично Christie et al., 2015). У наших обезьян были электроды разной длины, и разные экспериментаторы указывали пороги обнаружения шипов и шаблоны для сортировки шипов. Эти факты предполагают, что то, лучше ли отсортированное количество спайков или количество пересечений порога лучше для моторного декодирования, зависит от специфики экспериментальной подготовки.
Мы считаем, что сравнение отсортированных подсчетов спайков и подсчетов пересечений пороговых значений — неправильный способ судить о достоинствах сортировки спайков, поскольку наличие хэша является смешивающим фактором. Когда присутствие или отсутствие хэша как мешающего фактора удаляется путем сравнения отсортированного количества всплесков с количеством объединенных всплесков или путем сравнения отсортированного количества всплесков с пересечением хеша и порогового значения, преимущество сортировки становится очевидным.
Пороги обнаружения пиков, которые мы использовали в основном анализе, были довольно низкими по абсолютной величине, <3 стандартных отклонения шума по сравнению с типичными значениями в полевых условиях (особенно когда не сортировка пиков) и значениями по умолчанию, наблюдаемыми в коммерческих системах сбора пиков. .Однако наши более низкие абсолютные пороговые значения, вероятно, были более оптимальными для выявления двигательного намерения, особенно величины предполагаемой скорости руки (Oby et al., 2016). Действительно, наши последующие анализы подтверждают, что наши исходные пороговые значения привели к лучшим реконструкциям, чем пороги, составляющие -4,5 стандартного отклонения шума. При более строгом пороге стандартного отклонения шума -4,5 отсортированные пики с хешем все еще были значительно лучше, чем пересечения порога, но отсортированные существенно не отличались от объединенных.
Шумовые характеристики записывающих установок могут отличаться, поэтому наши результаты здесь не могут быть обобщены. Например, установка записи, которая улавливает множество артефактов пересечения порога, может не иметь чистой выгоды от включения хэша. Однако наши результаты предполагают, что практикующие ИМТ, использующие отсортированное количество спайков, должны проверить, улучшает ли включение хеш-сигналов в виде нескольких единиц декодирование в их экспериментальную подготовку.
Связанные работы
Помимо работы Вентуры и Тодорова (2015), на которой основана эта работа, были и другие работы, в которых для декодирования использовались особенности формы волны.Chen et al. (2012) и Kloosterman et al. (2014) использовали особенности формы волны для декодирования из записей гиппокампа. Их подход основан на пространственно-временном процессе Пуассона, где процесс Пуассона описывает время прихода пика, а случайный вектор описывает особенности формы волны пика. Позже Deng et al. (2015) представили декодер отмеченного точечного процесса, который использует особенности формы волны в качестве отметок точечного процесса, и протестировали его на записях гиппокампа. Этот подход по духу аналогичен пространственно-временному пуассоновскому процессу.Основное различие между этими подходами и нашим заключается в том, как сегментировано время. Пространственно-временной процесс Пуассона и процесс отмеченных точек работают с одиночными всплесками, что требует высокой частоты обновления и несколько более сложного байесовского вывода. Наш подход работает с временными интервалами, которые обеспечивают более низкую частоту обновления и совместимость с относительно простыми фильтрами Калмана и Винера. Однако работа с временными интервалами требует некоторого способа суммировать информацию о форме волны всех всплесков, которые произошли во время интервала, отсюда моменты Вентуры и Тодоровой и наши суммы.Эта статистика влечет за собой собственные допущения (линейность настройки, стационарность формы сигнала и т. Д.) И приближения (с использованием конечного числа моментов или сумм).
Тодорова и др. (2014) расшифровали двигательное намерение на основе подсчета пересечения порога и характеристики формы волны пиковой амплитуды. Их модель была непараметрической и соответствовала схеме максимизации ожидания Вентуры (2009). Из-за непараметрической модели для декодирования требовался дорогостоящий в вычислительном отношении фильтр частиц. Этот недостаток привел к поиску более эффективного с вычислительной точки зрения метода, результатом которого стала структура моментов характеристик осциллограмм, предложенная Вентурой и Тодоровой (2015).
Также связаны более ранние работы Ventura по сортировке шипов с использованием информации о настройке двигателя (Ventura, 2009) и по сортировке целых цепочек шипов, чтобы воспользоваться исторической информацией (Ventura and Gerkin, 2012). Эти идеи похожи на декодирование характеристик сигнала, поскольку они также сочетают в себе информацию о форме пиков и настройку нейронных сетей, но отличаются тем, что целью является сортировка пиков.
Ограничения
Одним из ограничений этого исследования является использование автономных реконструкций.В этой области ведутся споры о том, всегда ли улучшенные автономные реконструкции приводят к улучшению онлайн-контроля. Необходима дальнейшая работа с использованием сравнений декодирования в режиме онлайн, чтобы полностью проверить эффективность декодирования характеристик сигнала.
Авторские взносы
JL и ZL разработали исследование и написали рукопись. JL собрал и проанализировал данные.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Эта работа была поддержана Национальным фондом естественных наук Китая (61401028), Национальной программой ключевых фундаментальных исследований Китая (2014CB846101), Национальным фондом естественных наук Китая (61431002) и Фондом фундаментальных исследований для центральных университетов (2017XTCX04) . Мы благодарим Wu Li, Feng Wang, Minggui Chen, Xiuli Chen и Chenguang Zhang за техническую помощь и помощь во время операций на животных и Simin Li за помощь в сборе данных.Мы благодарим Джозефа О’Догерти за полезное обсуждение рукописи. Мы также благодарим рецензентов за полезные комментарии по поводу улучшения рукописи.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/article/10.3389/fnins.2017.00406/full#supplementary-material
Список литературы
Бенсмайя, С. Дж., И Миллер, Л. Э. (2014). Восстановление сенсомоторной функции через интракортикальные интерфейсы: прогресс и надвигающиеся проблемы. Нат. Rev. Neurosci. 15, 313–325. DOI: 10.1038 / nrn3724
CrossRef Полный текст | Google Scholar
Кармена, Дж. М., Лебедев, М. А., Крист, Р. Э., О’Догерти, Дж. Э., Сантуччи, Д. М., Димитров, Д. Ф. и др. (2003). Научитесь управлять интерфейсом мозг-машина для достижения и хватания приматов. PLoS Biol. 1: e42. DOI: 10.1371 / journal.pbio.0000042
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Чен З., Клоостерман Ф., Лейтон, С., Уилсон, М.А. (2012). «Трансдуктивное нейронное декодирование несортированных нервных импульсов гиппокампа крысы», , Ежегодная международная конференция Общества инженеров биологии и медицины IEEE, 2012 г., (Сан-Диего, Калифорния), 1310–1313. DOI: 10.1109 / EMBC.2012.6346178
CrossRef Полный текст | Google Scholar
Chestek, C.A., Gilja, V., Nuyujukian, P., Foster, J.D., Fan, J.M., Kaufman, M.T., et al. (2011). Долговременная стабильность управляющих сигналов нервного протеза от кремниевых кортикальных матриц в моторной коре макака-резус. J. Neural Eng. 8: 045005. DOI: 10.1088 / 1741-2560 / 8/4/045005
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Кристи, Б. П., Тат, Д. М., Ирвин, З. Т., Гиля, В., Нуюджукян, П., Фостер, Дж. Д. и др. (2015). Сравнение сортировки спайков и определения пороговых значений форм сигналов напряжения для работы интракортикального интерфейса мозг-машина. J. Neural Eng. 12: 016009. DOI: 10.1088 / 1741-2560 / 12/1/016009
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Каннингем, Дж.П., Гиля, В., Рю, С. И., и Шеной, К. В. (2009). Методы оценки частоты нейронных импульсов и их применение к интерфейсам мозг-машина. Neural Netw. 22, 235–1246. DOI: 10.1016 / j.neunet.2009.02.004
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Дэн, X., Лю, Д. Ф., Кей, К., Франк, Л. М., и Иден, У. Т. (2015). Бескластерное декодирование местоположения по многоблочной активности с использованием отмеченного точечного фильтра процесса. Neural Comput. 27, 1–23.DOI: 10.1162 / NECO_a_00744
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Фрейзер, Г. В., Чейз, С. М., Уитфорд, А., и Шварц, А. Б. (2009). Управление интерфейсом мозг-компьютер без сортировки спайков. J. Neural Eng. 6: 055004. DOI: 10.1088 / 1741-2560 / 6/5/055004
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Гибсон, С., Джуди, Дж. У., и Маркович, Д. (2012). Сортировка шипов. Сигнальный процесс IEEE. Magaz. 124–143.DOI: 10.1109 / MSP.2011.941880
CrossRef Полный текст | Google Scholar
Клоостерман, Ф., Лейтон, С. П., Чен, З., и Уилсон, М. А. (2014). Байесовское декодирование с использованием несортированных шипов в гиппокампе крысы. J. Neurophysiol. 111, 217–227. DOI: 10.1152 / jn.01046.2012
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Левицки М.С. (1998). Обзор методов сортировки спайков: обнаружение и классификация нейронных потенциалов действия. Netw. Comput. Neural Syst. 9, 53–78. DOI: 10.1088 / 0954-898X_9_4_001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ли З., О’Догерти Дж. Э., Лебедев М. А. и Николелис М. А. Л. (2011). Адаптивное декодирование для интерфейсов мозг-машина посредством обновления байесовских параметров. Neural Comput. 23, 3162–3204. DOI: 10.1162 / NECO_a_00207
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Обы, Э.Р., Перель, С., Sadtler, P. T., Ruff, D. A., Mischel, J. L., Montez, D. F., et al. (2016). Настройки порога внеклеточного напряжения могут быть настроены для оптимального кодирования параметров движения и стимула. J. Neural Eng. 13: 036009. DOI: 10.1088 / 1741-2560 / 13/3/036009
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Перель, С., Садтлер, П. Т., Оби, Э. Р., Рю, С. И., Тайлер-Кабара, Э. К., Батиста, А. П. и др. (2015). Единичная активность, пересечение порогов и потенциалы локального поля в моторной коре дифференциально кодируют кинематику досягаемости. J. Neurophysiol. 114, 1500–1512. DOI: 10.1152 / jn.00293.2014
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Смит, К., и Панински, Л. (2013). Вычисление потери эффективности в оптимальных байесовских декодерах при наличии зашумленных или неполных цепочек пиков. Netw. Comput. Neural Syst. 24, 75–98. DOI: 10.3109 / 0954898X.2013.789568
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Тодорова С., Садтлер П., Батиста А., Чейз, С., Вентура, В. (2014). Сортировать или не сортировать: влияние сортировки на производительность нейронного декодирования. J. Neural Eng. 11: 056005. DOI: 10.1088 / 1741-2560 / 11/5/056005
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Вентура В., Геркин Р. (2012). Точная оценка нейрональной корреляции требует новой парадигмы сортировки спайков. Proc. Natl. Акад. Sci. США 109, 7230–7235. DOI: 10.1073 / pnas.1115236109
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Вентура, В., и Тодорова, С. (2015). Вычислительно эффективный метод включения информации о пиковом сигнале в алгоритмы декодирования. Neural Comput. 27, 1–18. DOI: 10.1162 / NECO_a_00731
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Уиллер, Б. К., Хитдеркс, В. Дж. (1982). Сравнение методов классификации нескольких нейронных сигналов. IEEE Trans. Биомед. Англ. БМЕ-29, 752–759. DOI: 10.1109 / TBME.1982.324870
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Вон, Д.С. (2007). Теоретико-информационный анализ обработки спайков в модели нейропротеза . Диссертация, Университет Дьюка.
Ву В., Гао Ю., Биненшток Э., Донохью Дж. П. и Блэк М. (2006). Байесовская популяционная расшифровка моторной корковой активности с использованием фильтра Калмана. Neural Comput. 18, 80–118. DOI: 10.1162 / 089976606774841585
PubMed Аннотация | CrossRef Полный текст | Google Scholar
сканирование и декодирование формы волны LTE — MATLAB и Simulink
Этот пример показывает, как захватить и декодировать сигнал LTE, полученный либо из файла, либо по радио, с помощью LTE Toolbox ™ и различных пакетов поддержки оборудования (HSP).Прежде чем пользовательское оборудование (UE) сможет связаться с сетью, оно должно выполнить процедуры поиска и выбора соты и получить начальную системную информацию. Это включает в себя синхронизацию слотов и кадров, определение идентификатора соты и декодирование главного информационного блока (MIB) и системных информационных блоков (SIB). В этом примере запускается графический интерфейс пользователя (GUI), который позволяет:
Необходимое оборудование и программное обеспечение
Чтобы запустить этот пример с использованием захваченных сигналов из файла, вам понадобится этот файл:
Файл основной полосы частот (*.bb) : использует объект comm.BasebandFileReader для чтения ранее захваченных сигналов LTE.
Для приема сигналов в реальном времени вам также потребуется одно из этих программно-определяемых радиоустройств (SDR) и соответствующий дополнительный пакет поддержки SDR:
Вызов основного графического интерфейса
Этот код запускает графический интерфейс, который можно использовать для захватить и декодировать сигнал LTE.
hScanLTEWaveformGUI; % Открывает графический интерфейс
Пользовательские вводы
Эти параметры поиска необходимо предоставить через графический интерфейс для выполнения операции сканирования LTE:
Источник сигнала : Источник сигнала может быть любым из этих вариантов.По умолчанию «Источник сигнала» установлен на «Файл».
Файл : эфирные сигналы, записанные в файл основной полосы частот (* .bb).
RTL-SDR : Радио RTL-SDR.
ADALM-PLUTO : Радиостанция ADALM-PLUTO.
USRP-B200 / B210 : Радиомодуль серии USRP® B (B200 или B210).
USRP-N200 / N210 : Радиомодуль серии USRP® N (N200 или N210).
USRP-X300 / X310 : Радиомодуль серии USRP® X (X300 или X310).
ZedBoard-FMC2 / 3/4 : Совет по оценке и развитию Zynq® (ZedBoard) с FMC 2/3/4.
ZC706-FMC2 / 3/4 : Оценочный комплект Zynq®-7000 SoC ZC706 с FMC 2/3/4.
Все эти радиомодули используются для захвата живых сигналов LTE для определенных настроек радиосвязи.
Имя файла сигнала : Если Источник сигнала — это файл , то вам необходимо предоставить файл основной полосы частот (*.bb), который содержит сигнал LTE.
Центральная частота : Центральная частота сохраненного сигнала LTE в Гц.
Диапазон частот LTE : Для Источник сигнала , отличный от Файл , вы можете выполнить поиск в диапазоне частот, установив диапазон частот LTE на любой из 44 доступных частотных диапазонов LTE. Из этих 44 диапазонов RTL-SDR поддерживает только 14 диапазонов из-за ограничения центральной частоты .
Пользовательская частота (МГц) : Вы можете искать сигнал LTE в настраиваемой полосе частот, которая может быть одной частотой или диапазоном частот, имеющим минимальные и максимальные значения.Поддерживаемые форматы для этого поля: [Fmin, Fmax] и [Fmin1, Fmax1; Fmin2, Fmax2], где (Fmin, Fmin1 и Fmin2) и (Fmax, Fmax1 и Fmax2) представляют минимальную и максимальную частоты в указанном диапазоне, соответственно.
Сдвиг частоты (ppm) : для радиостанций RTL-SDR и USRP в качестве источника сигнала вы можете указать смещение несущей частоты в частях на миллион (ppm) в диапазоне [-1e4, 1e4].
Тип информационного блока : Вы можете выбрать MIB или MIB и SIB1 .Для RTL-SDR поддерживается только декодирование MIB из-за ограничения полосы пропускания.
После настройки параметров поиска необходимо нажать кнопку Начать поиск , чтобы начать поиск. Вы можете остановить поиск в любой момент, нажав кнопку Stop .
Процедура декодирования
Процедура декодирования этого примера может быть описана как:
Захват подходящего количества кадров сигнала LTE с использованием оборудования SDR или из файла основной полосы частот.
Определите и исправьте сдвиг частоты принятого сигнала.
Выполните слепой поиск соты, чтобы определить идентичность соты.
Синхронизируйте захваченный сигнал с началом кадра LTE.
OFDM демодулируют принятый сигнал, чтобы получить сетку ресурсов LTE.
Выполните оценку канала для принятого сигнала.
Декодируйте MIB для каждого захваченного кадра, чтобы определить настройки для всей ячейки.
Декодируйте CFI и PDCCH для каждого подкадра в захваченном сигнале.
Нанесите измерения опорного сигнала (RSRQ, RSRP, RSSI) на графический интерфейс. Используя график измерения опорного сигнала , вы можете выбрать один из опорных сигналов и построить его в зависимости от частоты.
На основе информационного блока типа , декодируйте информацию MIB и SIB1 и обновите эти поля в графическом интерфейсе пользователя.
Информационные поля MIB:
DuplexMode — Тип структуры кадра
CyclicPrefix — Длина циклического префикса
NDLRB — Количество блоков ресурсов нисходящего канала
Ссылка на ячейку 906 антенные портыPHICHDuration — длительность PHICH
Ng — групповой множитель HICH
NFrame — Номер кадра
Информационные поля SIB1:
временное значение RNTI
PRBSet — Отсчитываемые от нуля индексы блока физических ресурсов (PRB)
NLayers — Количество уровней передачи
Модуляция — Тип модуляции
RV — Версия с резервированием
TxScheme — Схема передачи
CRC — Проверка циклическим избыточным кодом
Повторите все шаги процедуры декодирования для каждой частоты в указанном диапазоне частот.
Чтобы получить декодированную информацию, относящуюся к каждой обнаруженной ячейке, вы можете использовать эти раскрывающиеся списки:
Частота обнаруженных ячеек (МГц): перечисляет частоты, на которых обнаруживаются ячейки.
Идентификатор обнаруженной соты: список идентификаторов сот на частоте LTE, выбранной из Частота обнаруженных сот (МГц) .
Обнаруженные ячейки выделяются маркерами на графике измерения опорного сигнала. Вы можете просмотреть идентификатор и частоту каждой ячейки, щелкнув соответствующий маркер.
Вы можете наблюдать за информацией об обнаруженных ячейках в графическом интерфейсе, как показано на этих рисунках,
Для запуска по умолчанию с использованием файла в качестве Источник сигнала :
Поиск в частотном диапазоне с использованием SDR в качестве Источник сигнала :
Приложение
В этом примере используется следующая функция:
Цифровой осциллограф Siglent SDS1104X-E, 100 МГц, 4 канала, стандартный декодер и SDG1032X, сигнал произвольной формы
Стиль: декодер + произвольная форма волны
Цифровой осциллограф Siglent SDS1104X-E, 100 МГц, 4 канала, стандартный декодер
В серии SDS1000X-E используется технология нового поколения SPO (Super-Phosphor Oscilloscope), которая обеспечивает превосходную точность воспроизведения сигнала и производительность.Системный шум также ниже, чем у аналогичных продуктов в отрасли. Он поставляется с минимальным входным диапазоном по вертикали 500 мкВ / диван. Новаторская цифровая система запуска с высокой чувствительностью и низким джиттером, а также скорость захвата формы сигнала 400 000 кадров / сек (режим последовательности). SDS1000X -E также использует 256-уровневую функцию отображения градации интенсивности и режим отображения цветовой температуры, которых нет в других моделях этого класса. Новейший осциллограф SIGLENT поддерживает несколько мощных режимов запуска, включая запуск по последовательной шине.Включено декодирование последовательной шины для типов шин IIC, SPI, UART, CAN, LIN. Модели X-E также включают в себя запись истории сигналов и последовательный запуск, что обеспечивает расширенную регистрацию и анализ сигналов. Еще одним мощным дополнением является новая математическая функция БПФ на 1 миллион точек, которая дает SDS1000X -E очень высокое разрешение по частоте при наблюдении за спектрами сигналов. Новый цифровой дизайн также включает аппаратный сопроцессор, который выполняет измерения быстро и точно без замедления сбора данных и отклика передней панели.По характеристикам и характеристикам новый SDS1000X -E от SIGLENT не может сравниться с другими продуктами этого ценового класса. Четырехканальная серия включает в себя еще больше функций, в том числе: поиск и навигацию, экранный график Боде, 16 цифровых каналов (опция), модуль AWG 25 МГц с внешним питанием (опция), адаптер USB WIFI (опция) и встроенный приложение, которое позволяет удаленно управлять через веб-браузер. Дополнительная возможность MSO
Siglent Technologies SDG1032X Сигнал произвольной формы — Генератор функций
SIGLENT SDG1032X — последнее дополнение компании Siglent к и без того мощной линейке генераторов произвольных сигналов / функций.Благодаря возможности смещения фазы между Ch2 и Ch3, многочисленным типам модуляции, режиму генерации гармоник, этот генератор 30 МГц может генерировать прямоугольные волны до 30 МГц. Функция, которой нет у большинства других генераторов в этом ценовом классе.
Диагностика шины CAN и последовательное декодирование Вопросы и ответы — продолжение
Вы можете найти снимок сверху и соответствующую информацию в следующей теме форума.
Как мы можем гарантировать доставку идеального, бесшумного прямоугольного сигнала с фиксированным переходом для декодирования контроллером CAN?
Я думаю, что ответ никогда не будет, но Bosch уже подумал об этом
Вопрос 2:
«Если Pico декодирует сообщение CAN, как мы можем гарантировать, что автомобильные контроллеры тоже сделают это? Или, иначе говоря, может ли быть так, что допустимые диапазоны напряжения в узлах могут отличаться от допустимых диапазонов, установленных в программном обеспечении Pico? »
Это отличный вопрос, поскольку мы никогда не можем предположить, что все контроллеры CAN декодированы правильно только потому, что PicoScope успешно декодировал.
PicoScope будет декодировать данные CAN на основе пороговых напряжений, выбранных во время настройки декодирования (которые могут отсутствовать на всей шине CAN).
Мы предполагаем, что все контроллеры CAN получают одинаковые уровни напряжения от шины CAN на своих соответствующих клеммах, но на самом деле это не так. Ошибка может существовать в разветвлении CAN к одному ECU / узлу CAN, в результате чего этот узел не может декодировать, в то время как остальные узлы декодируют успешно (включая PicoScope).
Что касается диапазонов напряжения в узлах, приведенный выше пункт поможет объяснить, как каждый узел CAN может работать с различными пороговыми значениями напряжения на соответствующих клеммах шины CAN.
В таком сценарии, когда один узел CAN не смог декодировать из-за экстремальных колебаний напряжения шины CAN, у нас есть несколько возможных сценариев.
- Последовательные данные сообщают о потере связи с узлом CAN, который не может декодировать данные шины CAN
- Несколько узлов CAN сообщают о потере связи с одним конкретным узлом CAN (указывая пальцем).
- Последовательный список «Проверка шины данных» «Узлы на линии» обнаруживает один отсутствующий узел
- Декодированные данные, отображаемые в PicoScope, могут обнаруживать несколько рецессивных битов в полях RTR, ACK или ошибки CRC
- Использование выделенного CAN-декодера / регистратора также выявило бы ошибки поля, упомянутые в пункте 4, но декодированные на силиконовом уровне, а не на физическом уровне, как с помощью PicoScope.
Мы должны помнить, что PicoScope — это не специализированный CAN-декодер / регистратор, а осциллограф с ограниченными функциями декодера / регистратора. Декодирование данных CAN на основе уровней напряжения, зафиксированных в одной точке измерения на шине CAN (физический уровень), потенциально может оказаться бесполезным, поскольку уровни напряжения могут быть разными по всей шине CAN.
Следующая тема форума немного подробнее рассматривает уникальные сигнатуры напряжения, связанные с узлами CAN.
Декодирование на силиконовом слое (через специальный регистратор CAN) позволяет точно фиксировать то, что может видеть каждый узел, поскольку каждый узел будет отображать свою интерпретацию данных из напряжений, присутствующих на соответствующих выводах CAN.Здесь мы обходим измерение физического уровня, чтобы получить обратную связь от каждого контроллера CAN в каждом узле на шине.
С учетом сказанного, если силиконовый слой отображает ошибки (через ваш CAN-логгер), нам нужно будет проверить физический уровень с помощью PicoScope, либо на одном ошибочном узле (на предмет ошибок декодирования одного узла), либо на всей шине, если несколько узлов сообщение об ошибках декодирования.
Вопрос 3:
Тестирование CAN с активной оконечной нагрузкой.
Это была функция, о которой я не знал, пока вопрос не был поднят во время прямой трансляции.
После внимательного прочтения становится очевидным, почему активная оконечная нагрузка CAN-шины может использоваться в автомобильных сетях. Если мы вернемся к тому, почему необходима пассивная оконечная нагрузка (фиксированный резистор / расположение), то активная оконечная нагрузка имеет смысл.
Пассивная оконечная нагрузка в основном предназначена для ограничения отражений сигнала напряжения путем согласования полного сопротивления проводки CAN «витая пара». Без завершения сигналы отражаются обратно в проводку (как эхо), где они сталкиваются с существующими сообщениями CAN (трафик).Эти коллизии имеют неблагоприятный эффект искажения сообщений CAN, изменяя их соответствующие уровни напряжения и, конечно же, битовую синхронизацию.
Ограничения пассивной оконечной нагрузки
Обычно пассивная оконечная нагрузка устанавливается на каждом конце CAN-шины, что может быть проблематичным с точки зрения производителя (как технический специалист попытается найти «истинные» концы CAN-шины)
Passive терминатор может поддерживать полное сопротивление шины только в том случае, если рецессивное напряжение остается на заданном уровне.Если мы обнаружим ошибки напряжения или цепи, которые изменяют характеристики сопротивления шины, пассивные согласующие резисторы среагируют соответствующим образом, что приведет к колебаниям импеданса шины и риску повреждения данных.
Преимущества активной оконечной нагрузки
С учетом вышеизложенного, активная оконечная нагрузка решает эти проблемы напрямую, используя преимущество конечного управления импедансом шины в условиях изменяющейся нагрузки (трафика).
Активное завершение служит той же цели, что и пассивное завершение, но с большим преимуществом, заключающимся в том, что оно динамическое.Это позволяет производителю транспортного средства размещать согласующие резисторы в любом узле CAN, обеспечивая больший уровень свободы при разработке транспортного средства.
Активная оконечная нагрузка позволяет использовать несколько конфигураций транспортных средств как во время, так и после производства (имея в виду преобразования транспортных средств).
Активная оконечная нагрузка будет иметь возможность тщательно контролировать и контролировать импеданс шины в различных условиях цепи, когда изменяются напряжение и условия трафика шины. Следовательно, импеданс будет оставаться стабильным на всем протяжении, обеспечивая целостность данных CAN.
Сделав еще один шаг вперед, активное терминирование обеспечит оптимальный импеданс шины во время исключительной нагрузки шины из-за интенсивного трафика CAN. Это достигается за счет кратковременного сокращения длительности воздействия шины (путем изменения положения оконечного резистора), что сокращает время прохождения данных (распространение).
Это, без сомнения, даст приоритет тем областям сети, которые могут выиграть от выбранного завершения для обеспечения доставки точных данных CAN.
Эта ссылка поможет познакомиться с Active Termination и приведет вас к другим источникам информации.
Итак, теперь мы думаем о том, «как тестировать такие сети?»
С этого момента я поделился своими мыслями о тестировании таких сетей, поскольку я еще не нашел ни одного транспортного средства, использующего эту технологию. (Я уверен, что есть.)
Напряжения на шине останутся аналогичными, поскольку я не вижу немедленной необходимости в их изменении. Таким образом, тестирование физического уровня на предмет активности и пороговых значений напряжения будет таким же, однако мы должны учитывать состояние завершения шины.
Может случиться так, что все узлы CAN будут иметь оконечный резистор по умолчанию (активен по запросу), или может быть так, что выбранные узлы будут иметь возможность стать активными оконечными узлами, когда это необходимо.
Доступ к точным техническим данным и обучение будут иметь первостепенное значение, поскольку знания — сила (особенно знание продукта).
Обладая достаточными знаниями в сочетании с осциллографом и сканером оригинального оборудования, мы сможем переводить шину в различные состояния завершения, фиксируя эти события с помощью PicoScope.
Было бы очень интересно зафиксировать влияние на сообщения CAN во время перехода от одного согласующего резистора к другому, поскольку я уверен, что это будет видно! (Это само по себе будет ценным диагностическим свидетельством функциональности.)
Я надеюсь, что часть этого поможет, и, пожалуйста, не стесняйтесь добавлять дополнительную информацию или делиться своим опытом решения этих дополнительных проблем, с которыми мы сталкиваемся при использовании CAN.
Вопрос 4
В сетях FlexRay используются согласующие резисторы?
Между CAN и FlexRay есть ряд физических сходств, за которые мы можем быть благодарны, и к ним относятся согласующие резисторы (которые используются в конце шины FlexRay), знакомые кабели витой пары и разность напряжений между ними. .
Типичные значения согласующего резистора находятся в диапазоне от 80 до 110 Ом, поэтому обязательно обращайтесь к соответствующим техническим данным.
Читая руководство BMW, их подход к измерению оконечных резисторов в сетях FlexRay сопровождается предупреждением о неправильной интерпретации!
Проблема связана с различными вариантами завершения FlexRay, которые могут привести к неверной интерпретации измеренного значения сопротивления. На данном этапе я могу только думать, что использование нескольких оконечных резисторов может привести к разным значениям в зависимости от точки измерения на шине.Полагаю, мы тоже не можем на 100% полагаться на измерения сопротивления?
Опять же, что касается BMW (F31), они используют различные конфигурации сетей FlexRay на одном и том же автомобиле. Например, от модуля шлюза (ZGM) к кластеру коммутации рулевой колонки (SZL) является единственная двухточечная шина с согласующими резисторами в обоих модулях. Тем не менее, контроль устойчивости, управление шасси и управление двигателем находятся на другой шине с резисторами внутри модулей контроля устойчивости и управления двигателем.
Я насчитал еще 6 сетей FlexRay с 12 согласующими резисторами.
Здесь поможет наличие точной технической информации, но снова становится бесценным прицел для динамического тестирования сети.
Здесь вы можете найти информацию об измерении сигналов FlexRay с помощью датчиков TA375 с высоким сопротивлением.
Примечание. В этом сообщении на форуме я упомянул, что функция декодирования FlexRay не увенчалась успехом. Это была пилотная ошибка от моего имени, поскольку вам необходимо инвертировать либо дифференциальные напряжения (A-B), либо сигнал, захваченный на канале A (канал B не требует инвертирования для успешного декодирования).Я знаю, что это немного сбивает с толку, и я буду копать глубже, почему.
Расшифровка кривых давления в сонной артерии, записанных с помощью лазерной доплеровской виброметрии: Эффекты повторного дыхания: Материалы конференции AIP: Том 1600, № 1
Основная цель этого исследования заключалась в оценке возможностей метода лазерной доплеровской виброметрии (LDV) для оценки сердечно-сосудистой активности . Задание на повторное дыхание использовалось, чтобы спровоцировать изменения у людей в сердечной и сосудистой деятельности. Известно, что задача повторного дыхания вызывает множество эффектов, связанных с изменениями вегетативной активности, а также с изменениями газов крови.В частности, повышение уровня CO2 (гиперкапния) вызывает изменения в мозговом и системном кровообращении. Результаты повторного дыхания (включая повторное дыхание тем же воздухом в резиновом мешке) представлены для 35 человек. Пульс LDV измеряли от участка, расположенного над сонной артерией. В целях сравнения и проверки было также получено несколько традиционных показателей сердечно-сосудистой функции, с акцентом на электрокардиограмму (ЭКГ), постоянное артериальное давление (АД) на лучевой артерии и измерения показателей миокарда с помощью импедансной кардиографии (ICG).В периоды активного дыхания вентиляция усиливается. Обычные сердечно-сосудистые эффекты включали повышение среднего артериального АД и системного сосудистого сопротивления, а также снижение ударного сердечного объема (SV) и времени прохождения импульса (PTT). Эти эффекты соответствовали модели α-адренергической стимуляции. Напротив, во время сегментов сразу после повторного дыхания среднее АД в значительной степени не изменилось, но пульсовое АД увеличилось, как и ЧТВ и УВ, тогда как системное сосудистое сопротивление снизилось — закономерность, согласующаяся с β-адренергическими эффектами в сочетании с прямыми эффектами гиперкапнии на сосудистая система.Измерения сердечно-сосудистой активности, полученные на основе скорости пульса LDV и форм волны смещения, выявили закономерности изменений, которые отражали результаты, полученные с помощью обычных измерений. В частности, отношение максимального раннего пика в импульсе скорости LDV к максимальной амплитуде импульса смещения LDV (в раннем систолическом интервале) близко отражало обычные эффекты SV. Кроме того, изменения коэффициента увеличения (рассчитанного как максимальная амплитуда импульса смещения LDV во время систолы / амплитуда в конце падающей волны) были очень похожи на изменения системного сосудистого сопротивления.Частота сердечных сокращений, измеренная по ЭКГ и ЛДВ, была почти идентична. Эти предварительные результаты предполагают, что измерения, полученные с помощью бесконтактного метода LDV, могут предоставить суррогатные измерения для показателей, полученных с помощью импедансной кардиографии.
Устранение шума из сигнала генератора шаблонов путем декодирования и восстановления сложной формы волны Сарика Малхотра, Паван Кумар Шукла, округ Колумбия Дубкария :: SSRN
The IUP Journal of Science & Technology, Vol.6, No. 4, pp. 51-59, Декабрь 2010 г.
Размещено: 12 фев 2011
Дата написания: 10 февраля 2011 г.
Абстрактные
Генераторы шаблонов являются источником стандартных и предопределенных шаблонов, необходимых для выполнения юстировки телевизоров и других устройств отображения. Он генерирует шаблоны в соответствии с требованиями различных международных стандартов для выравнивания устройств отображения, независимо от типа панели отображения.Чтобы соответствовать международным стандартам, различные предопределенные шаблоны генерируются с помощью генераторов шаблонов и комбинируются с помощью видеомикшеров. После микширования эти сигналы передаются на производственные линии с помощью трехэкранированных кабелей для настройки телевизора или проверки характеристик телевизора. Во время генерации и передачи этих сигналов в систему вносится шум. В статье представлен новый подход к повышению точности и единообразия настройки параметров телевизора.Сложные формы сигналов, генерируемые видеогенераторами в помещении «центральной передачи сигнала», декодируются и сравниваются с формами сигналов на этапах выравнивания. Для декодирования сигналов используются несколько инструментов обработки изображений. Стратегии контроля используются для исправления наблюдаемого отклонения.
Ключевые слова: Сложные формы сигналов, генератор шаблонов, интерфейс GPIB, синхронизация, уровни цветности
Рекомендуемое цитирование: Предлагаемая ссылка
Малхотра, Шарика и Шукла, Паван Кумар и Дубкария, Д.C., Устранение шума из сигнала генератора шаблонов путем декодирования и восстановления сложной формы волны (10 февраля 2011 г.). IUP Journal of Science & Technology, Vol. 6, No. 4, pp. 51-59, December 2010, Доступно в SSRN: https://ssrn.com/abstract=1759067Переводчик азбуки Морзе | Декодер Морзе
Что такое азбука Морзе?
Код Морзе — это схема кодирования символов, которая позволяет операторам отправлять сообщения, используя серию электрических импульсов, представленных другими словами в виде коротких или длинных импульсов, точек и тире.
Кто изобрел азбуку Морзе?
Сэмюэл Ф. Б. Морс и его помощник Альфред Вейл известны как изобретатели азбуки Морзе.
Когда была изобретена азбука Морзе?
Азбука Морзе, разработанная в 1830-х годах, а затем усовершенствованная в 1840-х годах.
Когда был запатентован код Морзе?
Сэмюэл Морс получил патент США, US1647A, на телеграфные сигналы с точечным тире 20 июня 1840 года. С другой стороны, некоторые источники утверждают, что Сэмюэл Морс получил патент, выданный османским султаном Абдулмеджидом I, на азбуку Морзе.Однако, согласно мемуарам Сайруса Хэмлина и некрологу The New York Times, опубликованному 3 апреля 1872 года, Сэмюэл Морс вместо этого получил не патент, а орден Османской империи — Орден Славы.
Какое было первое сообщение, отправленное по азбуке Морзе?
«То, что сотворил Бог» — это первое официальное сообщение, отправленное Сэмюэлем Ф.Б. Морзе 24 мая 1844 года, чтобы открыть телеграфную линию Балтимор — Вашингтон.
Для чего используется азбука Морзе?
В прошлом азбука Морзе широко использовалась, особенно в вооруженных силах.Хотя сегодня азбука Морзе имеет ограниченную область применения, она все еще используется в авиации, радиолюбительской деятельности и вспомогательных технологиях (AT).
Как использовать код Морзе?
Код Морзе можно использовать по-разному, например, с помощью ручки и бумаги или с помощью света и звука. Даже его можно использовать с такими частями тела, как глаза или пальцы.
Трудно ли выучить азбуку Морзе?
Несмотря на то, что в прошлом азбуке Морзе приходилось изучать круто, благодаря современным приложениям, таким как переводчик кода Морзе или клавиатура Gboard, в настоящее время выучить азбуку Морзе стало проще.
Как выучить азбуку Морзе?
Вы можете выучить азбуку Морзе, изучая и слушая азбуку Морзе, а также используя методы запоминания слов, которые можно найти на различных веб-сайтах. Однако одним из лучших методов обучения азбуке Морзе в 2021 году станет клавиатура Gboard, разработанная Google. С помощью упражнений для изучения Морзе, предоставленных Google Creative Lab, вы даже можете выполнять упражнения онлайн бесплатно.
Как читать азбуку Морзе?
Если вы недостаточно хорошо читаете азбуку Морзе, вы можете найти соответствующее представление Морзе для каждого символа из таблицы азбуки Морзе или воспользоваться переводчиком азбуки Морзе.
Как перевести код Морзе?
Если вы хотите перевести или расшифровать азбуку Морзе и не умеете читать азбуку Морзе, вы можете воспользоваться переводчиком азбуки Морзе онлайн. С помощью декодера Морзе вы можете легко декодировать азбуку Морзе и читать английский текст. Поэтому можно и закончить поиск вопросом, как вы переводите азбуку Морзе.
Что такое переводчик азбуки Морзе?
Переводчик азбуки Морзе — это переводчик, который позволяет любому переводить текст в код Морзе и легко декодировать код Морзе в текст.С помощью онлайн-переводчика азбуки Морзе любой может преобразовать любой простой текст на английском или другом языке в азбуку Морзе и наоборот.
Как пользоваться переводчиком азбуки Морзе?
Просто введите код Морзе или текст в соответствующие поля ввода, чтобы использовать преобразователь кода Морзе. Например, вы помните SMS-сигнал Nokia? Попробуйте расшифровать «… — …», а затем воспроизвести его звук. Как насчет расшифровки секретного сообщения на азбуке Морзе или пасхального яйца, которое вы нашли в игре, в которую вы играли? Что ж, переводчик азбуки Морзе может помочь вам, если у вас есть подключение к Интернету и вы хотите выучить азбуку Морзе.
Что означает SOS?
SOS — это сигнал бедствия на азбуке Морзе, признанный во всем мире для получения помощи. Впервые он был принят правительством Германии в 1905 году. Хотя некоторые люди думают, что SOS означает «Спасите наши души» или «Спасите наш корабль», его буквы не означают ничего.
Что такое SOS в азбуке Морзе?
SOS на азбуке Морзе — «… — …»
Что такое азбука Морзе для «Я люблю тебя»?
«Я люблю тебя» на азбуке Морзе — «.. / .- .. — …-. / -.— — ..- ”
Как поздороваться с азбукой Морзе?
«Привет» на азбуке Морзе — «….. .- .. .- .. — »
Как сказать «помощь» на азбуке Морзе?
«Справка» на языке Морзе — «….. .- .. .—. », Но вы также можете использовать сигнал SOS, который представляет собой« … — … ».
Что означает — в азбуке Морзе?
«—» означает «O» на азбуке Морзе.
Что означают три точки в азбуке Морзе?
Буква S — это три точки в азбуке Морзе: «… »
Может ли Siri перевести код Морзе?
Да, Siri может переводить азбуку Морзе. Если вы хотите попробовать, скажите: «Привет, Siri, что такое азбука Морзе для Hello?»
.