


2.1.5. Расчёт пусковых сопротивлений асинхронных двигателей

где rЯ = rД +rПУСК +rПР – полное сопротивление якорной цепи при тор-
можении.
Полагая Емакс. ≈ UH (торможение со скорости идеального холостого хо-
да), что ведёт к некоторому увеличению сопротивления ступени противовключения, и подставляя вместо IТ ток IТ.НАЧ, соответствующий μТ.НАЧ., получим
IТ.НАЧ | ≈ | 2U H | |
rД +rПУСК +rПР | |||
|
|
и
IТ.НАЧ −(rД +rПУСК ).
Методика расчёта пусковых сопротивлений асинхронных двигателей
приведена в работах [1, с. 201-206; 2, с. 74-82; 3, с. 221-237].
На практике часто выполняется приближённый расчёт пусковых сопротивлений, полагая, что пуск асинхронного двигателя происходит на линейных участках механических характеристик. Поэтому расчёт пусковых сопротивлений асинхронных двигателей выполняется аналогично расчёту пусковых сопротивлений двигателей постоянного тока с независимым или параллельным возбуждением (см. пп. 2.1.3).
Отметим некоторые особенности расчёта.
Графический способ расчёта. Расчёт естественной механической характеристики двигателя производится по формуле
μе = |
| 2тk | , | (2.5) | ||
| se | + | ske | |||
|
|
|
| |||
|
| ske | se |
|
| |
|
|
|
|
| ||
где μе – относительный момент двигателя не естественной характеристике; se – скольжение двигателя на естественной характеристике;
41
ske – критическое скольжение двигателя на естественной характеристике, приводится для данного двигателя в справочниках на электрические машины [4,5];
тk = | M k | – перегрузочная способность двигателя, приводится для |
| ||
| M H | |
данного двигателя в справочниках на электрические машины [4,5]; Мk – критический момент двигателя.
Задаваясь скольжениями se от 0 до 1, по формуле (2.5) вычисляют относительный момент двигателя для заданных скольжений и строят естественную механическую характеристику двигателя в двигательном режи-
ме: μе = f(se).
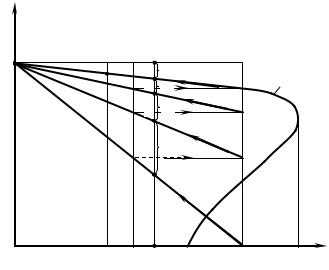
Построив естественную механическую характеристику и задавшись величиной пикового момента μ1 ≤ 0,85тk (при форсированном пуске) или величиной момента переключения μ2 ≥ 0,1μC (при нормальном пуске),
строят пусковую диаграмму двигателя.
Например, для схемы пуска двигателя в три ступени, приведённой на рис. 2.2, пусковая диаграмма будет иметь вид, показанный на рис. 2.6.
s
0 | sc | a | ρр |
|
в | ест. | |||
|
| c | ρ3 | |
|
|
| ||
|
| d | ρ2 |
|
|
| e | ρ1 |
|
|
|
|
|
1 | f |
|
| |
μс μ2 μ=1 | μ1 | μk μ | ||
0 |
Рис. 2.6. Пусковая диаграмма асинхронного двигателя при пуске в три ступени
42
Величину момента переключения μ2 при форсированном пуске, а при нормальном пуске величину пикового момента μ1, определяют по формулам:
μ2 = μλ1 ; μ1 = μ2λ,
где λ = μ1 .
μ2
При форсированном пуске:
λ = m s |
| 1 |
H | μ . | |
| 1 |
При нормированном пуске:
где т – число ступеней пуска;
sН – номинальное скольжение двигателя; приводится в справочниках на электрические машины [4,5].
Для определения сопротивлений ступеней пускового реостата необходимо вычислить номинальное активное сопротивление ротора:
RPH = | EPH , | (2.6) |
| 3 I PH |
|
где ЕРН, IРН – соответственно номинальная ЭДС и номинальный ток ротора; приводятся в справочниках по электрическим машинам [4,5].
Сопротивления ступеней пускового реостата для рассматриваемого примера определяются по формулам:
r1 = afde RРH , r2 = cdaf RРH , r3 = afвc RРH .
Полное сопротивление пускового реостата:
43
rПУСК = afве RРH .
Аналогично вычисляются сопротивления ступеней пускового реостата и при большем числе ступеней пуска двигателя.
Аналитический способ расчёта. Аналитический расчёт пусковых сопротивлений асинхронных двигателей выполняется аналогично, как и для двигателей постоянного тока с параллельным возбуждением (см.
пп. 2.1.3):
r1 = rРλm−1(λ −1),
r2 = rРλm−2 (λ −1),
r3 = rРλm−3 (λ −1),
……………
rm = rР (λ −1),
где rP – активное сопротивление обмотки ротора, приводится в справочниках по электрическим машинам [4,5].
2.1.6. Расчёт тормозных сопротивлений асинхронных двигателей
Тормозные сопротивления асинхронных двигателей могут быть рассчитаны двумя способами: графическим и графоаналитическим.
Методика расчёта тормозных сопротивлений асинхронных двигате-
лей изложена в работах [1, с. 254-260; 2, с. 82-89; 3, с. 252-276].
Для упрощения расчёта полагают, что торможение осуществляется на линейном участке механической характеристики. В этом случае расчёт тормозных сопротивлений проще выполнить графическим способом, который и рассматривается ниже.
44
Динамическое торможение
Динамическое торможение асинхронного двигателя может осуществляться двумя способами: с независимым возбуждением и с самовозбуждением. Однако торможение с самовозбуждением не нашло широкого применения вследствие высокой стоимости конденсаторов, подключаемых к обмотке статора двигателя для его осуществления.
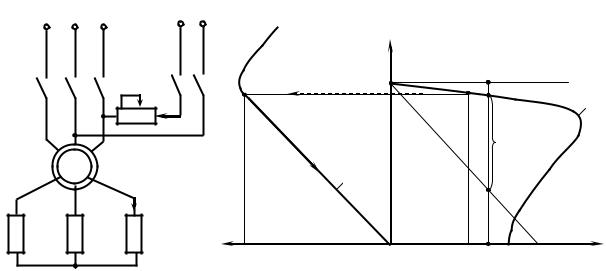
Для осуществления динамического торможения с независимым возбуждением обмотку статора вращающегося двигателя отключают от сети переменного тока и подключают к источнику постоянного тока. Обмотка ротора при этом может быть закорочена накоротко либо через добавочный резистор. Схема включения асинхронного двигателя с фазным ротором при динамическом торможении с независимым возбуждением имеет вид, представленный на рис. 2.7, а, а механические характеристики – на рис. 2.7, б. Для получения динамического торможения контактор КМ1 отключается и включается контактор КМ2.
– = U + |
|
|
|
|
| s |
|
|
|
КМ2 | 0 | sc | a |
|
IП | в | ест. | ||
|
|
| ||
|
|
| ρДТ |
|
| д.т. |
| c |
|
IP |
|
|
| |
1 |
|
|
| |
rД |
| d |
| |
|
|
| ||
–μ –μТ.НАЧ. | 0 | μс | μ=1 | μ |
Рис. 2.7. Схема включения (а) и механические характеристики асинхронного двигателя естественная и динамического торможения при различных сопротивлениях в цепи ротора (б)
Расчёт сопротивления динамического торможения, включаемого в
цепь ротора асинхронного двигателя с фазным ротором для ограничения
45

тока ротора при торможении, графическим способом производится следующим образом (рис. 2.7, б):
1.Задаются начальным тормозным моментом μТ.НАЧ. ≤ 0,85тk .
2.Проводят характеристику динамического торможения через начало координат и точку с координатами [sс, μТ.НАЧ.].
3.В первом квадранте из точки s = 0 проводят прямую, параллельную линейному участку характеристики динамического торможения.
4.Находят отрезок, отсекаемый естественной характеристикой двигателя и характеристикой, параллельной характеристике динамического торможения при номинальном моменте двигателя (μ = 1) – отрезок «в-с»).
5.Вычисляют по формуле (2.6) номинальное сопротивление ротора двигателя.
6.Определяютсопротивлениединамическоготорможенияпоформуле
rДТ = adвс RРH .
Противовключение
Торможение противовключением асинхронного двигателя осуществляется тогда, когда обмотки статора включены на одно направление вращения, а двигатель вращается в обратную сторону.
При реактивном статическом моменте на валу двигателя для получения противовключения необходимо поменять направление момента двигателя на противоположное по отношению к двигательному режиму, изменив чередование фаз питающего двигатель напряжения переключением двух фаз между собой. При этом существенно возрастает ЭДС ротора, а следовательно, и ток ротора вследствие более быстрого пересечения обмоток ротора вращающимся полем статора. Для ограничения тока ротора в этом режиме в ротор асинхронного двигателя с фазным ротором вводится добавочное сопротивление – ступень противовключения, которая вместе с
46
пусковым сопротивлением ограничивает ток двигателя до допустимых пределов.
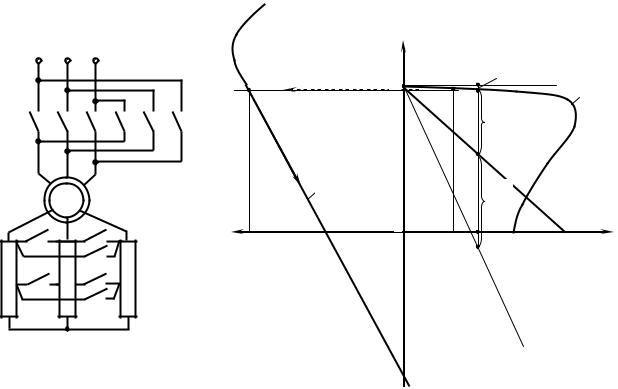
Схема включения асинхронного двигателя с фазным ротором в режиме противовключения показана на рис. 2.8, а, а механические характеристики естественная и противовключения – на рис. 2.8, б. Для получения противовключения контакторы КМ1, КМ3 и КМ4 отключаются и включается контактор КМ2.
~ 3 |
| s |
|
|
|
|
| 0 | sc | a | ρР |
|
|
| в | ест. | |
|
|
|
| ||
КМ1 | КМ2 |
|
| ρПУСК | |
|
|
|
| c |
|
М |
| пр |
|
| ρПР |
|
|
|
|
| |
|
| 1 | μс | d | |
КМ4 | –μ μТ.НАЧ. |
| е | μ=1 μ1 μ | |
rпуск |
|
|
|
|
|
КМ3 |
|
|
|
|
|
rпр |
|
|
|
|
|
2
Рис. 2.8. Схема управления асинхронным двигателем с торможением противовключением (а) и механические характеристики двигателя естественная и противовключения (б)
Наиболее просто сопротивление ступени противовключения определяется графическим способом. Порядок определения следующий (см.
рис. 2.8, б):
1. Задаются (или он должен быть задан) начальным тормозным моментом в пределах: μТ.НАЧ. ≤ 0,85тk .
47

2.Строят линейную часть механической характеристики торможения противовключением по двум точкам с координатами [s = sС, μ = μТ.НАЧ.]
и[s = 2, μ = 0].
3.В первом квадранте проводят прямую, параллельную механической характеристике торможения противовключением и находят точку пересечения её с прямой μ = 1, соответствующей номинальному моменту двигателя (точка «е»).
4.Находят численное значение сопротивления ступени противовключения в относительных единицах, которое равно отрезку, отсекаемому
при μ = 1 первой искусственной характеристикой при пуске двигателя (s = 0, μ = 0; s = 1, μ = μ1) и прямой, параллельной механической характеристике противовключения (отрезок «с–е»).
5. Определяютсопротивлениеступенипротивовключенияпоформуле rПР = adсе RРH .
48
Расчет энергетических параметров пуска асинхронного двигателя дутьевого вентилятора типа ВДН-18–11
Расчет энергетических параметров пуска асинхронного двигателя дутьевого вентилятора типа ВДН-18–11
Хашимов Арипджан Адилович, доктор технических наук, профессор, научный руководитель;
Нуржанов Бегмат Режеповгулович, магистр
Ташкентский государственный технический университет имени Абу Райхана Беруни (Узбекистан)}}}
Рассмотрены основные способы плавного пуска асинхронных двигателей и определены области их применения, определены электрические и энергетические параметры, время переходного процесса во время плавного пуска частотно-регулируемого асинхронного двигателя при условии постоянства частоты с регулированием напряжения статора.
Ключевые слова: прямой пуск, плавный пуск, частотно-регулируемый асинхронный двигатель, электрические и энергетические параметры, время пуска
The basic methods of the smooth starting of asynchronous engines are considered and their application domains are certain and electric and power parameters are certain, time of transient during the smooth starting of the frequency-managed asynchronous engine subject to condition constancy of frequency with adjusting to tension of stator.
В котельных агрегатах типа ТГМ151 Тахиаташской ТЭС для смещения природного газа с воздухом в топке используются центробежные дутьевые вентиляторы типа ВДН-18–11. В качестве приводного двигателя используется асинхронный двигатель с к. з. ротором типа 4А355М6У3 [1].
Выбор способа пуска асинхронного двигателя (АД) дутьевых вентиляторов является актуальной задачей, стоящей перед проектировщиками и эксплуатационниками электроприводами дутьевых вентиляторов, поскольку во время пуска АД наблюдается скачок изменения пускового тока в несколько раз по сравнению с номинальным его значением. При значительном времени периода пуска можно наблюдать перегрев обмотки статора, что может привести к выходу из строя изоляции обмотки статора [2, 4].
При пуске АД с к. з. по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи — по возможности малыми. Иногда к этим требованиям добавляют и другие, обусловленные особенностями конкретных приводов, в которых используют двигатели: необходимость плавного пуска, максимального пускового момента и пр.
Для пуска АД используются следующие способы пуска: прямой и при пониженном напряжении обмотки статора [2, 4].
Прямой пуск. Этот способ применяют для пуска АД с к. р. Двигатели этого типа обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети, возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В АД с к. з. L/R (где L-индуктивность и R-активное сопротивление обмотки статора) сравнительно мало, поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса.
Пуск при пониженном напряжении. Такой пуск применяют для АД с к. з. большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями:
а. переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Y. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в √3 раз, что обусловливает уменьшение фазных токов в √3 раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
б. включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений.
При этом на указанных сопротивлениях создается некоторое падение напряжения ΔUДОБ, пропорциональное пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДС Е2S, индуцированная в обмотке ротора, а, следовательно, и пусковой ток. В результате уменьшается падение напряжения ΔUДОБ на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко.
в. подключением двигателя к сети через понижающий автотрансформатор АТр, который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
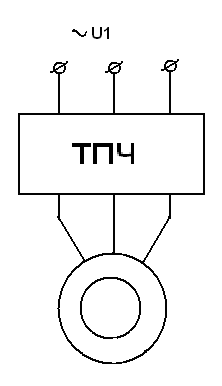
Из приложенных способов пуска частотно-регулируемого АД является понижение подаваемого напряжения в статорную обмотку при постоянстве ее частоты, равной номинальному его значению, так как на выходе в частотно-регулируемом преобразователе частоты напряжения и частота отдельно и независимо регулируются. Для пуска вхолостую АД с регулируемой частотой дутьевого вентилятора выбираем последний способ пуска, то есть при постоянстве частоты  и регулируемого значения на выходе управляемого выпрямителя
и регулируемого значения на выходе управляемого выпрямителя  .
.
Определим потери мощности АД дутьевого вентилятора для номинального режима. Номинальные технические параметры АД дутьевого вентилятора типа 4А355М6У3 имеют следующие значения: мощность РН = 200 кВт, nH = 990 об/мин., номинальное напряжение UН = 220/380 В, номинальное значение скольжения sН = 0,018, КПД = 94 %, коэффициент мощности 0,9, bmax = 1,9, bпуск = 1,0, пусковой ток Iпуск = 7*IН.
Суммарные потери мощности АД определим по формуле

Принимаем добавочные потери в статоре и механические потери равными:


Определим значения тока статора для номинального режима работы асинхроного двигателя

Приведенный ток ротора примерно равен на
 .
.
Определим потери в обмотке статора

Определим потери в роторе

Определим потери в стали статора

Определим из уравнения движения электропривода время разгона асинхронного двигателя, необходимое для достижения номинальной угловой скорости, при избыточном моменте, равном номинальному:

где  время ускорения агрегата, равное времени изменения скольжения на единицу под действием неизменного избыточного момента, равного номинальному,
время ускорения агрегата, равное времени изменения скольжения на единицу под действием неизменного избыточного момента, равного номинальному,  момент инерции электропривода дутьевого вентилятора.
момент инерции электропривода дутьевого вентилятора.
Определим потерии энергии в обмотке статора во время прямого пуска при номинальном значении напряжения асинхронного двигателя дутьевого вентилятора

Определим потери мощности АД дутьевого вентилятора для значения напряжения статорной обмотки  . Поскольку развиваемый момент прямо пропорционально квадрату напряжения, можно определить электромагнитный момент и механическую мощность АД следующими формулами:
. Поскольку развиваемый момент прямо пропорционально квадрату напряжения, можно определить электромагнитный момент и механическую мощность АД следующими формулами:
 ,
,
 .
.
Суммарные потери мощности АД определим по формуле

Принимаем добавочные потери в статоре и механические потери равными


Определим значения тока статора для номинального режима работы асинхроного двигателя

Приведенный ток ротора примерно равен на
 .
.
Определим потери в обмотке статора

Определим потери в роторе

Определим потери в стали статора

Определим из уравнения движения электропривода время разгона асинхронного двигателя при избыточном моменте, необходимое для достижения номинальной угловой скорости, при напряжении в статоре, равном 0,8Uн:

Определим потерии энергии в обмотке статора во время прямого пуска при номинальном значении напряжения асинхронного двигателя дутьевого вентилятора
На рис. 1 представлены кривые тока статора асинхронного двигателя 4А355М6У3 при различных значениях напряжения статора, рассчитанные по методике [3].
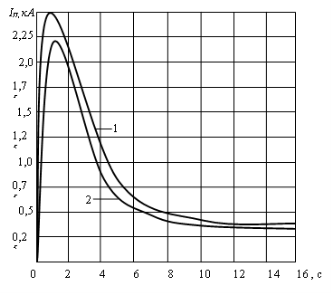
Рис. 1. Кривые пускового тока АД типа 4А355М6У3 для значений напряжения статора: 1 — при  и 2 —
и 2 — 
Таким образом, при пуске АД дутьевого вентилятора для номинального значения напряжения и для напряжения  соответственно имеют следующие значения
соответственно имеют следующие значения и
и  , то есть пусковой ток уменьшается на
, то есть пусковой ток уменьшается на  .
.
Литература:
- https://ru.wikipedia.org/wiki/Тахиаташ.
- Ҳошимов О. О., Имомназаров А. Т. Электр юритма асослари. 1 — қисм Олий ўқув юртлари учун ўқув қўлланма. — Тошкент: ТДТУ, 2004. — 194 б.
- Браславский И. Я., Ишматов З.Ш., Поляков В. Н. Энергосберегающий асинхронный электропривод. — Москва, ACADEMA, 2004. — 280 c.
Основные термины (генерируются автоматически): асинхронный двигатель, дутьевой вентилятор, обмотка статора, пусковой ток, прямой пуск, двигатель, номинальное значение напряжения, дутьевой вентилятор типа, плавной пуск, потеря.
Способы запуска трехфазных асинхронных двигателей
Доброго времени суток, уважаемые читатели блога nasos-pump.ru

Двигатели трехфазные
В рубрике «Общее» рассмотрим способы запуска трехфазных асинхронных двигателей с коротко замкнутым ротором. В настоящее время используются различные способы запуска асинхронных двигателей. При запуске двигателя должны удовлетворяться основные требования. Запуск должен происходить без применения сложных пусковых устройств. Пусковой момент должен быть достаточно большим, а пусковые токи как можно меньше. Современные электродвигатели являются энерго-эффективными двигателями и имеют более высокие пусковые токи, что заставляет уделять большее внимание их способам запуска. При подаче на двигатель напряжения питания возникает скачок тока, который называют пусковым током.
Пусковой ток обычно превышает номинальный в 5 – 7 раз, но действие его кратковременное. После того как двигатель вышел на номинальные обороты, ток падает до минимального. В соответствии с местными нормами и правилами, для снижения пусковых токов, и используются разные способы запуска асинхронных двигателей с коротко замкнутым ротором. Вместе с этим необходимо уделять внимание и стабилизации напряжения сетевого питания. Говоря о способах запуска, которые уменьшают пусковой ток, следует отметить, что период запуска не должен быть слишком долгим. Слишком продолжительные периоды запуска могут вызвать перегрев обмоток.
Прямой запуск
Самый простой и наиболее часто применяемый способ запуска асинхронных двигателей – это прямой пуск. Прямой пуск означает, что электродвигатель запускается прямым подключением к сетевому напряжению питания. Прямой пуск применяется при стабильном питании двигателя, жестко связанного с приводом, например насоса. На (Рис.1) приведена схема прямого пуска асинхронного двигателя.

Прямой пуск
Подключение двигателя в электрическую сеть происходит при помощи контактора (пускателя). Реле перегрузки необходимо для защиты двигателя в процессе эксплуатации от перегрузки по току. Двигатели малой и средней мощности обычно проектируют так, чтобы при прямом подключении обмоток статора к сетевому питанию пусковые токи, возникающие при запуске, не создавали чрезмерных электродинамических усилий и превышений температуры на двигатель, с точки зрения механической и термической прочности. Переходной процесс в момент запуска характеризуется очень быстрым затуханием свободного тока, что позволяет пренебречь этим током и учитывать только установившееся значение тока переходного процесса. На графике (Рис. 1) приведена характеристика пускового тока при прямом запуске асинхронного двигателя с коротко замкнутым ротором.
Прямой запуск от сети питания является самым простым, дешёвым и наиболее часто применяемым способом запуска. При таком запуске происходит наименьшее повышение температуры в обмотках электродвигателя во время включения по сравнению со всеми остальными способами запуска. Если нет жестких ограничений по току, то такой метод запуска является наиболее предпочтительным. В разных странах действуют различные правила и нормы по ограничению максимального пускового тока. В таких случаях, необходимо использовать другие способы запуска.
Для небольших электродвигателей пусковой момент будет составлять от 150% до 300% от номинального момента, а пусковой ток будет составлять от 300% до 700% от номинального значения или даже выше.
Запуск «звезда – треугольник»
Запуск переключением «звезда – треугольник» используется для трёхфазных индукционных электродвигателей и применяется для снижения пускового тока. Следует отметить, что запуск переключением «звезда – треугольник» возможен только в тех двигателей, у которых выведены начала и концы всех трех обмоток. Пульт для запуска «звезда – треугольник» состоит и следующих комплектующих, трех контакторов (пускателей), реле перегрузки по току и реле времени, управляющего переключением пускателей. Чтобы можно было использовать этот способ запуска, обмотки статора электродвигателя, соединенные по схеме «треугольник», должны быть рассчитаны на работу в номинальном режиме. Обычно электродвигатели рассчитаны на напряжение 400 В при соединении по схеме «треугольник» (∆) или на 690 В при соединении по схеме «звезда» (Y). Такая унифицированная схема соединения может быть также использована для пуска электродвигателя при более низком напряжении. Схема запуска переключением «звезда – треугольник» показана на (Рис. 2)

Пуск звезда треугольник
В момент пуска электропитание к обмоткам статора подключено по схеме «звезда» (Y) Замкнуты контакторы К1 и К3. По истечении определённого периода времени, зависящего от мощности двигателя и времени разгона, происходит переключение на режим запуска «треугольник» (∆). При этом контакты пускателя K3 размыкаются, а контакты пускателя K2 замыкаются. Управляет переключением контактов пускателей K3 и K2 реле времени. На реле выставляется время, в течение которого происходит разгон двигателя. В режиме запуска «звезда – треугольник» напряжение, подаваемое на фазы обмотки статора, уменьшается в корень из трех раз, что приводит к уменьшению фазных токов тоже в корень из трех раз, а линейных токов в 3 раза. Соединение по схеме «звезда – треугольник» дает более низкий пусковой ток, составляющий всего одну треть тока при прямом запуске. Запуск «звезда – треугольник» особенно хорошо подходят для инерционных систем, когда происходит «подхватывание» нагрузки после того, как произошел разгон двигателя.
Запуск «звезда – треугольник» также понижает и пусковой момент, приблизительно на треть. Данный метод можно использовать только для индукционных электродвигателей, которые имеют подключение к напряжению питания по схеме «треугольник». Если переключение «звезда – треугольник» происходит при недостаточном разгоне, то это может вызвать сверхток, который достигает почти такого же значения, что и ток при «прямом» запуске. За время переключения из режима «звезда» в «треугольник» двигатель очень быстро теряет скорость вращения, для ее восстановления необходим мощный импульс тока. Скачок тока может стать ещё больше, так как на время переключения двигатель остается без сетевого напряжения.
Запуск через автотрансформатор
Данный способ запуска осуществляется при помощи автотрансформатора, последовательно соединённого с электродвигателем во время запуска. Автотрансформатор понижает подаваемое на электродвигатель напряжение (приблизительно на 50–80% от номинального напряжения), чтобы произвести запуск при более низком напряжении. В зависимости от заданных параметров напряжение снижается в один или два этапа. Понижение напряжения, подаваемого на электродвигатель одновременно, приведёт к уменьшению пускового тока и вращающего пускового момента. Если в определённый момент времени к электродвигателю не подаётся питание, он не потеряет скорость вращения, как в случае с запуском «звезда – треугольник». Время переключения от пониженного напряжения к полному напряжению можно корректировать. На (Рис. 3) приведена характеристика пускового тока при запуске асинхронного двигателя с коротко замкнутым ротором при помощи автотрансформатора.

Пуск через автотрансформатор тока
Помимо уменьшения пускового момента, способ запуска через автотрансформатор имеет и недостаток. Как только электродвигатель начинает работать, он переключается на сетевое напряжение, что вызывает скачок тока. Вращающий момент зависит от напряжения подаваемого на двигатель. Значение пускового момента пропорциональны квадрату напряжения.
Плавный пуск
В устройстве «плавный пуск» используются те же IGBT транзисторы, что и в частотных преобразователях. Данные транзисторы через цепи управления, понижают начальное напряжение, поступающее на электродвигатель, что приводит к уменьшению пускового момента в электродвигателе. В процессе запуска «плавный пуск» постепенно повышает напряжение электродвигателя, что позволяет электродвигателю разогнаться до номинальной скорости вращения, не образуя большого момента и пиков тока. На (Рис. 4) приведена характеристика пускового тока при запуске асинхронного двигателя с коротко замкнутым ротором с помощью устройства «плавный пуск». Плавный запуск может использоваться также для управления торможением электродвигателя. Устройство «плавный пуск» дешевле преобразователя частоты. Использование устройства «плавного пуска» для асинхронных двигателей значительно увеличивают срок службы электродвигателя, а с ним и насоса находящегося на валу этого двигателя.

Диаграмма для плавного пуска двигателя
У «плавного пуска» существуют те же проблемы, что и у частотных преобразователей: они создают наводки (помехи) в систему электроснабжения. Данный способ также обеспечивает подачу пониженного напряжения к электродвигателю во время запуска. При плавном запуске электродвигатель включается при пониженном напряжении, которое затем увеличивается до напряжения сетевого питания. Напряжение в плавном пускателе уменьшается за счет фазового сдвига. Данный способ пуска не вызывает образования скачков тока. Время запуска и пусковой ток можно задавать.
Запуск при помощи частотного преобразователя
Частотные преобразователи предназначены не только для запуска, но и управления электродвигателем. Инвертор позволяет снизить пусковой ток, так как электродвигатель имеет жесткую зависимость между током и вращающим моментом. На (Рис. 5) приведена характеристика пускового тока при запуске асинхронного двигателя с помощью частотного преобразователя.

Пуск двигателя с преобразователем частоты
Преобразователи частоты остаются все еще дорогими устройствами, и также как и плавный пуск, создают дополнительные помехи в сеть электропитания.
Заключение
Задача любого из способов запуска электродвигателя заключается в том, чтобы согласовать характеристики вращающего момента электродвигателя с характеристиками механической нагрузки, при этом необходимо, чтобы пиковые токи не превышали допустимых значений. Существуют различные способы запуска асинхронных двигателей, каждый их которых имеет свои плюсы и минусы. И в заключении приведена небольшая таблица, где в краткой форме указаны преимущества и недостатки наиболее распространённых способов запуска асинхронных электродвигателей.
Таблица 1
Способы запуска | Преимущества | Недостатки |
Прямой запуск | Простой и экономичный. Безопасный запуск Самый большой пусковой момент | Высокий пусковой ток |
Запуск «звезда – треугольник» | Уменьшение пускового тока в три раза. | Скачки тока при переключении «звезда – треугольник». Не подходит, если нагрузка без инерционная. Пониженный пусковой момент. |
Запуск через автотрансформатор | Уменьшение пускового тока на U2. | Скачки тока при переходе от пониженного напряжения к номинальному напряжению. Пониженный пусковой момент. |
Плавный запуск | Отсутствуют скачки тока. Небольшой гидравлический удар при запуске насоса. Уменьшение пускового тока на требуемую величину, обычно в 2-3 раза. | Пониженный пусковой момент. |
Запуск при помощи частотного преобразователя | Отсутствуют скачки тока. Небольшой гидравлический удар при запуске насоса. Уменьшение пускового тока, обычно, до номинального. Напряжение питания на двигатель можно подавать постоянно. | Пониженный пусковой момент. Высокая стоимость. |
Спасибо за оказанное внимание.
P.S. Понравился пост? Порекомендуйте его в социальных сетях своим друзьям и знакомым.
Еще похожие посты по данной теме:
Пуск асинхронного двигателя
Пусковые свойства двигателей.
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п = 0 до п . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др. Ниже различные способы пуска рассматриваются более подробно.

Прямой пуск. Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на рис. 3.22. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора
 , (3.37)
, (3.37)
максимальны (см.п.3.19 при s=1). По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI= IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.

Рис. 3.22
Значение пускового момента находится из (3.23) при s = 1:
.(3.38)
Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться. С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
Пуск двигателей с улучшенными пусковыми свойствами. Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора.
Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ). По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах.
К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.

Рис.3.23 Рис. 3.24
Двигатели с глубокими пазами. Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части. Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой. В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.


Рис.3.25
Рис.3.26
Двигатели с двойной клеткой. В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1 размещается обмотка из латунных проводников, во внутренних 2 – обмотка из медных проводников. Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет.
По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой. Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше.
Пуск переключением обмотки статора.
Если при нормальной работе двигателя фазы статора соединены в треугольник, то, как показано на рис.3.27, при пуске первоначально они соединяются в звезду. Для этого сначала включается выключатель Q, а затем переключатель S ставится в нижнее положение Пуск. В таком положении концы фаз Х, Y, Z соединены между собой, т.е. фазы соединены звездой. При этом напряжение на фазе в √3 раз меньше линейного. В результате линейный ток при пуске в 3 раза меньше, чем при соединении треугольником. При разгоне ротора в конце пуска переключатель S переводится в верхнее положение и, как видно из рис. 3.27, фазы статора пересоединяются в треугольник. Недостатком этого способа является то, что пусковой момент также уменьшается в 3 раза, так как момент пропорционален квадрату фазного напряжения, которое в √3 раз меньше при соединении фаз звездой. Поэтому такой способ применим при небольшом нагрузочном моменте и только для двигателей, нормально работающих при соединении обмоток статора в треугольник.

Рис.3.27
Пуск при включении добавочных резисторов в цепь статора. (рис. 3.28). Перед пуском выключатель (пускатель) находится в разомкнутом состоянии и замыкается выключатель Q1.
При этом в цепь статора включены добавочные резисторы RДОБ. В результате обмотка статора питается пониженным напряжением U1n = U1НОМ – InRДОБ. После разгона двигателя замыкается выключатель Q2 и обмотка статора включается на номинальное напряжение U1НОМ. Подбором RДОБ можно ограничить пусковой ток до допустимого. Следует иметь в виду, что момент при пуске, пропорциональный U21П, будет меньше и составляет (U1П / U1НОМ)2 номинального. Важно отметить, что при этом способе пуска значительны потери в сопротивлении RДОБ (RДОБI21n). Можно вместо резисторов RДОБ включить катушки с индуктивным сопротивлением ХДОБ, близким к RДОБ.
Применение катушек позволяет уменьшить потери в пусковом сопротивлении.


Рис.3.29 Рис.3.28
Автотрансформаторный пуск. Кроме указанных способов можно применить так называемый автотрансформаторный пуск.
Соответствующая схема показана на рис.3.29. Перед пуском переключатель S устанавливается в положение 1, а затем включается автотрансформатор и статор питается пониженным напряжением U1П. Двигатель разгоняется при пониженном напряжении и в конце разгона переключатель S переводится в положение 2 и статор питается номинальным напряжением U1ном.
Если коэффициент трансформации понижающего трансформатора n, тогда ток I на его входе будет в n раз меньше. Кроме того, пусковой ток будет также в n раз меньше, т.е. ток при пуске в сети будет в n2раз меньше, чем при непосредственном пуске.
Этот способ, хотя и лучше рассмотренных в п.3.14.7, но значительно дороже.
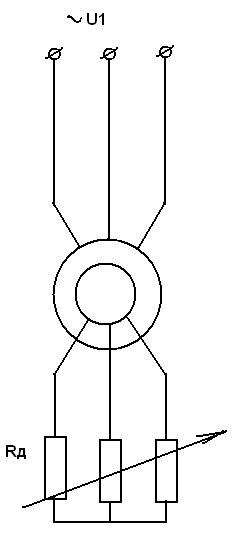
Пуск двигателя с фазным ротором.
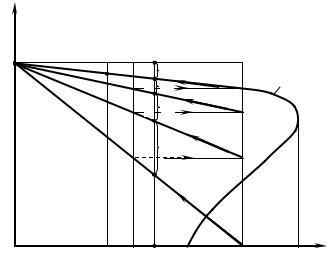
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30. Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
 Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда
Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда  .
.
Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату. При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.
Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате. Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротором. Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.
Расчет ступени противовключения для асинхронного двигателя.
Расчет ступени противовключения производится графоаналитическим методом.

∆ wсоответствует сопротивлению двигателя. По пропорции определяетсяRпр.

Сопротивление противовключения выбираем исходя из допустимого тормозного момента.
Торможение асинхронного двигателя противовключением.
Производится при переключении двух любых фаз. Магнитное поле при этом будет вращаться противоположно вращению ротора, а электромагнитный момент будет тормозным.
В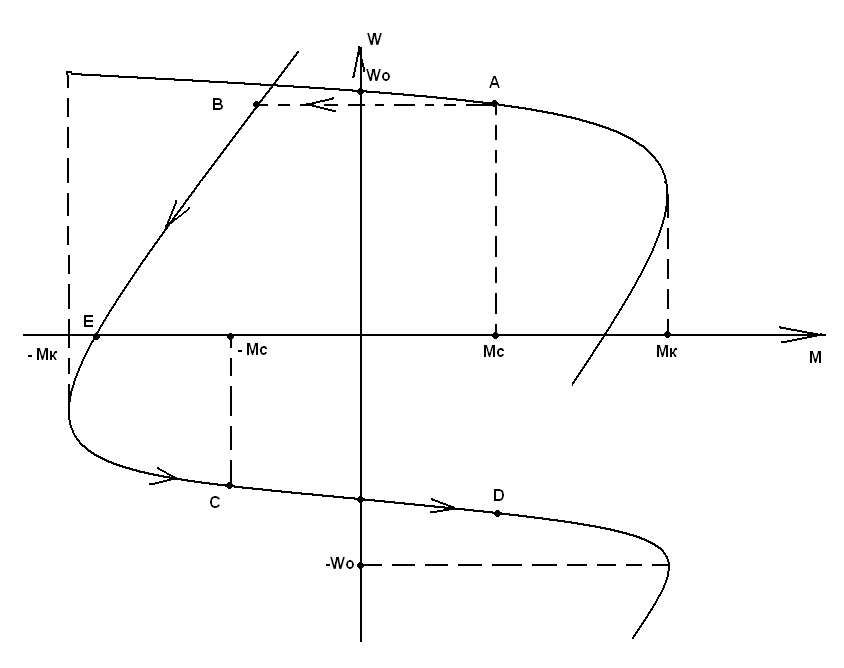 точке Е двигатель отключается от сети.
точке Е двигатель отключается от сети.
Для Мс реактивного – АВС.
Для Мс активного – АВСD.
Для АД с фазным ротором в момент противовключения в цепь ротора вводится сопротивление противовключения для ограничения тока ротора.

Rд3=Rкр+Rд
После изменения направления вращения двигатель может быть разогнан до Wcпо А-Б-В-Г-Д-Е-Ж-З-Н. В случае торможения до «0» в точке К двигатель отключается от сети.
Способ торможения противовключением
эффективен, прост, обеспечивает малое
время торможения. Недостаток –
значительные потери энергии 
Регулирование скорости асинхронных двигателей.
Если проанализировать влияние параметров асинхронного двигателя на его механические характеристики:

то можно сделать вывод о возможности регулирования скорости АД:
Изменением числа пар полюсов;
Изменением сопротивления в цепи ротора;
Изменением напряжения U1;
Изменением сопротивления в цепи статора;
Изменением частоты подводимого напряжения.
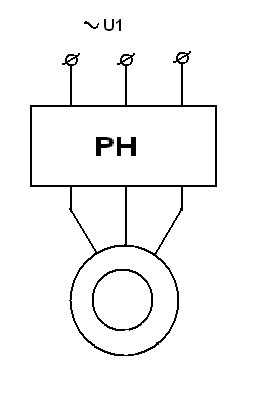
Регулирование скорости АД изменением числа пар полюсов.
Изменение числа пар полюсов обеспечивает
ступенчатое регулирование синхронной
скорости  .
При одной обмотке на статоре число
ступеней равно 2, а при двух – четырем.
Данный способ требует применения
специальных двигателей. Применим для
АД с короткозамкнутым ротором. Наибольшее
распространение получили схемыΔ
и. Переключение
обмоток производится автоматически.
.
При одной обмотке на статоре число
ступеней равно 2, а при двух – четырем.
Данный способ требует применения
специальных двигателей. Применим для
АД с короткозамкнутым ротором. Наибольшее
распространение получили схемыΔ
и. Переключение
обмоток производится автоматически.

К достоинству этого способа можно отнести простоту его реализации и отсутствие больших потерь скольжения. Главным его недостатком является ограниченное число ступеней регулирования.
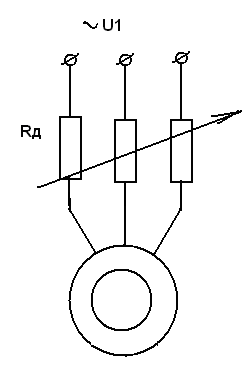
Регулирование скорости АД изменением сопротивления в цепи ротора.
Этот способ применим только для АД с фазным ротором.
При введении и изменении сопротивления в цепи ротора изменяется критическое скольжение АД а МКиw0остаются без изменений.
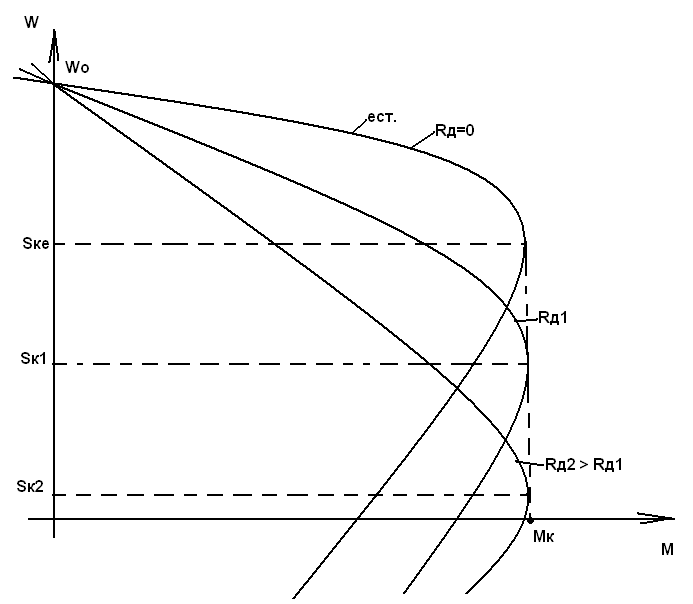
Этот способ отличает простота и дешевизна. Область применения ограничена механизмами у которых момент нагрузки изменяется в зависимости от скорости в небольших пределах.
Регулирование скорости АД изменением напряжения.
Данный способ применяется преимущественно для АД с короткозамкнутым ротором. Изменение U1приводит к изменению критического момента, без измененияw0иSК.
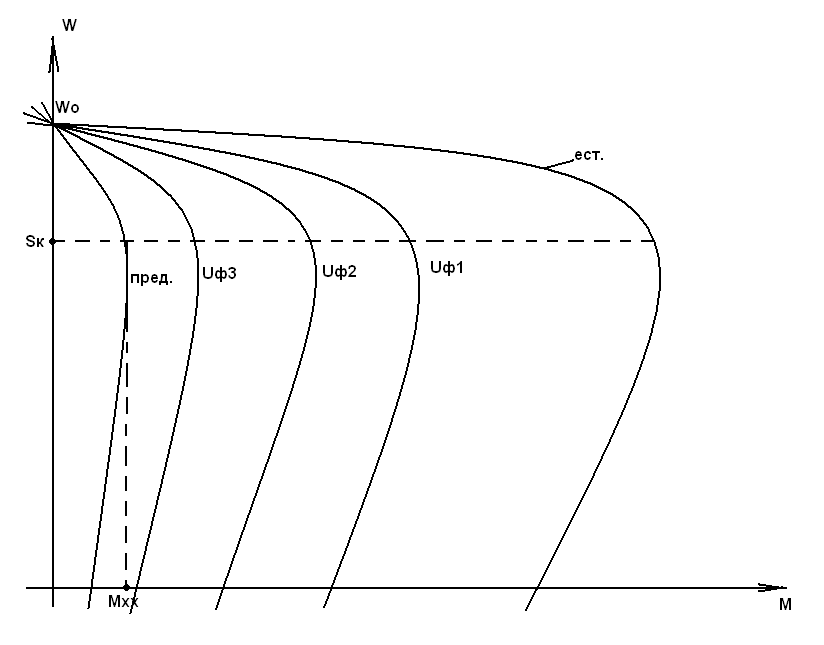
При снижении напряжения, подводимого к статору, изменяется поток, что при МС=constприводит к увеличению тока и возрастанию потерь. Поэтому приведенный способ регулирования применяется для механизмов, имеющих вентиляторную нагрузку (т.е. приwМС). Для таких механизмов данный способ нашел большое применение при использовании электродвигателей мощностью 20…30 кВт.
Регулирование скорости АД изменением сопротивления статора.
Регулирование скорости по этому способу возможно в сторону снижения. Способ очень схож с регулированием скорости изменением напряжения. При изменении R1изменяется как критический момент, так и критическое скольжение.

Применяется преимущественно для АД с короткозамкнутым ротором.
Регулирование скорости АД изменением частоты подводимого напряжения.
Этот способ применим как для отдельных АД, так и для АД приводящих во вращение группы механизмов. Возможность регулирования скорости вытекает из выражения:
 .
.
Следует учитывать, что при изменении
частоты изменяется и индуктивное
сопротивление АД, поэтому будет изменяться
значения  и характеристики будут иметь следующий
вид:
и характеристики будут иметь следующий
вид:
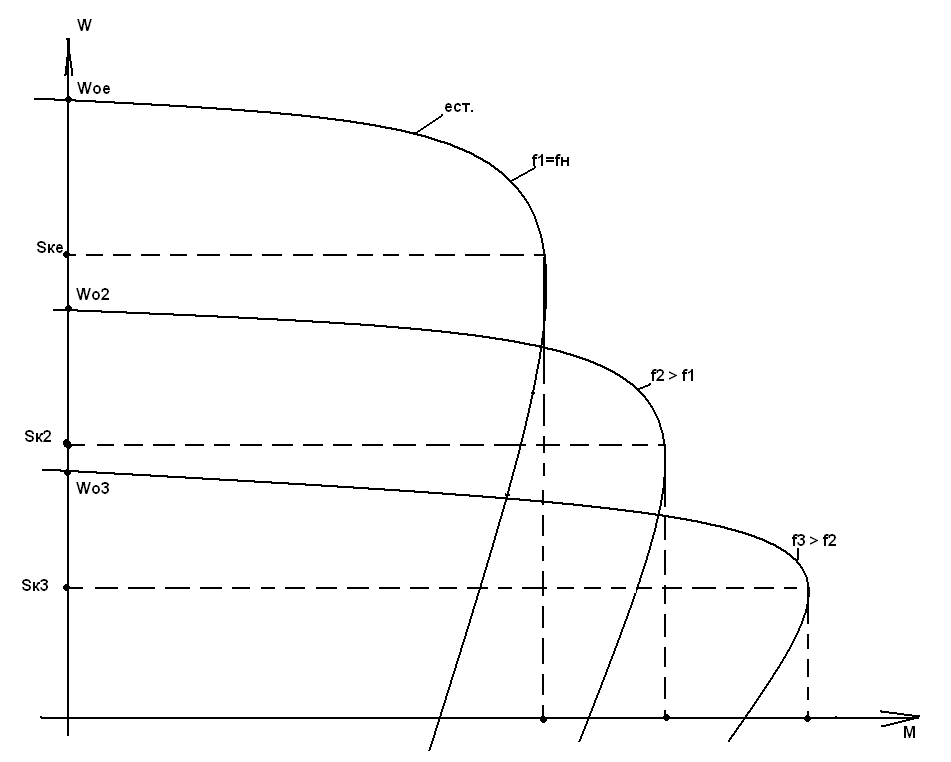
Основным недостатком электроприводов с частотным управление является необходимость использования преобразователей частоты.
Чтобы критический момент был постоянным, необходимо поддерживать постоянным следующее соотношение

2.1.5. Расчёт пусковых сопротивлений асинхронных двигателей

где rЯ = rД +rПУСК +rПР – полное сопротивление якорной цепи при тор-
можении.
Полагая Емакс. ≈ UH (торможение со скорости идеального холостого хо-
да), что ведёт к некоторому увеличению сопротивления ступени противовключения, и подставляя вместо IТ ток IТ.НАЧ, соответствующий μТ.НАЧ., получим
IТ.НАЧ | ≈ | 2U H | |
rД +rПУСК +rПР | |||
|
|
и
IТ.НАЧ −(rД +rПУСК ).
Методика расчёта пусковых сопротивлений асинхронных двигателей
приведена в работах [1, с. 201-206; 2, с. 74-82; 3, с. 221-237].
На практике часто выполняется приближённый расчёт пусковых сопротивлений, полагая, что пуск асинхронного двигателя происходит на линейных участках механических характеристик. Поэтому расчёт пусковых сопротивлений асинхронных двигателей выполняется аналогично расчёту пусковых сопротивлений двигателей постоянного тока с независимым или параллельным возбуждением (см. пп. 2.1.3).
Отметим некоторые особенности расчёта.
Графический способ расчёта. Расчёт естественной механической характеристики двигателя производится по формуле
μе = |
| 2тk | , | (2.5) | ||
| se | + | ske | |||
|
|
|
| |||
|
| ske | se |
|
| |
|
|
|
|
| ||
где μе – относительный момент двигателя не естественной характеристике; se – скольжение двигателя на естественной характеристике;
41
ske – критическое скольжение двигателя на естественной характеристике, приводится для данного двигателя в справочниках на электрические машины [4,5];
тk = | M k | – перегрузочная способность двигателя, приводится для |
| ||
| M H | |
данного двигателя в справочниках на электрические машины [4,5]; Мk – критический момент двигателя.
Задаваясь скольжениями se от 0 до 1, по формуле (2.5) вычисляют относительный момент двигателя для заданных скольжений и строят естественную механическую характеристику двигателя в двигательном режи-
ме: μе = f(se).
Построив естественную механическую характеристику и задавшись величиной пикового момента μ1 ≤ 0,85тk (при форсированном пуске) или величиной момента переключения μ2 ≥ 0,1μC (при нормальном пуске),
строят пусковую диаграмму двигателя.
Например, для схемы пуска двигателя в три ступени, приведённой на рис. 2.2, пусковая диаграмма будет иметь вид, показанный на рис. 2.6.
s
0 | sc | a | ρр |
|
в | ест. | |||
|
| c | ρ3 | |
|
|
| ||
|
| d | ρ2 |
|
|
| e | ρ1 |
|
|
|
|
|
1 | f |
|
| |
μс μ2 μ=1 | μ1 | μk μ | ||
0 |
Рис. 2.6. Пусковая диаграмма асинхронного двигателя при пуске в три ступени
42
Величину момента переключения μ2 при форсированном пуске, а при нормальном пуске величину пикового момента μ1, определяют по формулам:
μ2 = μλ1 ; μ1 = μ2λ,
где λ = μ1 .
μ2
При форсированном пуске:
λ = m s |
| 1 |
H | μ . | |
| 1 |
При нормированном пуске:
где т – число ступеней пуска;
sН – номинальное скольжение двигателя; приводится в справочниках на электрические машины [4,5].
Для определения сопротивлений ступеней пускового реостата необходимо вычислить номинальное активное сопротивление ротора:
RPH = | EPH , | (2.6) |
| 3 I PH |
|
где ЕРН, IРН – соответственно номинальная ЭДС и номинальный ток ротора; приводятся в справочниках по электрическим машинам [4,5].
Сопротивления ступеней пускового реостата для рассматриваемого примера определяются по формулам:
r1 = afde RРH , r2 = cdaf RРH , r3 = afвc RРH .
Полное сопротивление пускового реостата:
43
rПУСК = afве RРH .
Аналогично вычисляются сопротивления ступеней пускового реостата и при большем числе ступеней пуска двигателя.
Аналитический способ расчёта. Аналитический расчёт пусковых сопротивлений асинхронных двигателей выполняется аналогично, как и для двигателей постоянного тока с параллельным возбуждением (см.
пп. 2.1.3):
r1 = rРλm−1(λ −1),
r2 = rРλm−2 (λ −1),
r3 = rРλm−3 (λ −1),
……………
rm = rР (λ −1),
где rP – активное сопротивление обмотки ротора, приводится в справочниках по электрическим машинам [4,5].
2.1.6. Расчёт тормозных сопротивлений асинхронных двигателей
Тормозные сопротивления асинхронных двигателей могут быть рассчитаны двумя способами: графическим и графоаналитическим.
Методика расчёта тормозных сопротивлений асинхронных двигате-
лей изложена в работах [1, с. 254-260; 2, с. 82-89; 3, с. 252-276].
Для упрощения расчёта полагают, что торможение осуществляется на линейном участке механической характеристики. В этом случае расчёт тормозных сопротивлений проще выполнить графическим способом, который и рассматривается ниже.
44
Динамическое торможение
Динамическое торможение асинхронного двигателя может осуществляться двумя способами: с независимым возбуждением и с самовозбуждением. Однако торможение с самовозбуждением не нашло широкого применения вследствие высокой стоимости конденсаторов, подключаемых к обмотке статора двигателя для его осуществления.
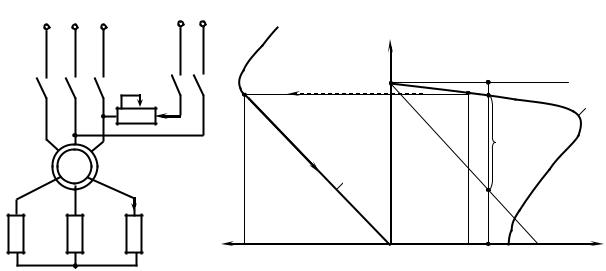
Для осуществления динамического торможения с независимым возбуждением обмотку статора вращающегося двигателя отключают от сети переменного тока и подключают к источнику постоянного тока. Обмотка ротора при этом может быть закорочена накоротко либо через добавочный резистор. Схема включения асинхронного двигателя с фазным ротором при динамическом торможении с независимым возбуждением имеет вид, представленный на рис. 2.7, а, а механические характеристики – на рис. 2.7, б. Для получения динамического торможения контактор КМ1 отключается и включается контактор КМ2.
– = U + |
|
|
|
|
| s |
|
|
|
КМ2 | 0 | sc | a |
|
IП | в | ест. | ||
|
|
| ||
|
|
| ρДТ |
|
| д.т. |
| c |
|
IP |
|
|
| |
1 |
|
|
| |
rД |
| d |
| |
|
|
| ||
–μ –μТ.НАЧ. | 0 | μс | μ=1 | μ |
Рис. 2.7. Схема включения (а) и механические характеристики асинхронного двигателя естественная и динамического торможения при различных сопротивлениях в цепи ротора (б)
Расчёт сопротивления динамического торможения, включаемого в
цепь ротора асинхронного двигателя с фазным ротором для ограничения
45

тока ротора при торможении, графическим способом производится следующим образом (рис. 2.7, б):
1.Задаются начальным тормозным моментом μТ.НАЧ. ≤ 0,85тk .
2.Проводят характеристику динамического торможения через начало координат и точку с координатами [sс, μТ.НАЧ.].
3.В первом квадранте из точки s = 0 проводят прямую, параллельную линейному участку характеристики динамического торможения.
4.Находят отрезок, отсекаемый естественной характеристикой двигателя и характеристикой, параллельной характеристике динамического торможения при номинальном моменте двигателя (μ = 1) – отрезок «в-с»).
5.Вычисляют по формуле (2.6) номинальное сопротивление ротора двигателя.
6.Определяютсопротивлениединамическоготорможенияпоформуле
rДТ = adвс RРH .
Противовключение
Торможение противовключением асинхронного двигателя осуществляется тогда, когда обмотки статора включены на одно направление вращения, а двигатель вращается в обратную сторону.
При реактивном статическом моменте на валу двигателя для получения противовключения необходимо поменять направление момента двигателя на противоположное по отношению к двигательному режиму, изменив чередование фаз питающего двигатель напряжения переключением двух фаз между собой. При этом существенно возрастает ЭДС ротора, а следовательно, и ток ротора вследствие более быстрого пересечения обмоток ротора вращающимся полем статора. Для ограничения тока ротора в этом режиме в ротор асинхронного двигателя с фазным ротором вводится добавочное сопротивление – ступень противовключения, которая вместе с
46
пусковым сопротивлением ограничивает ток двигателя до допустимых пределов.
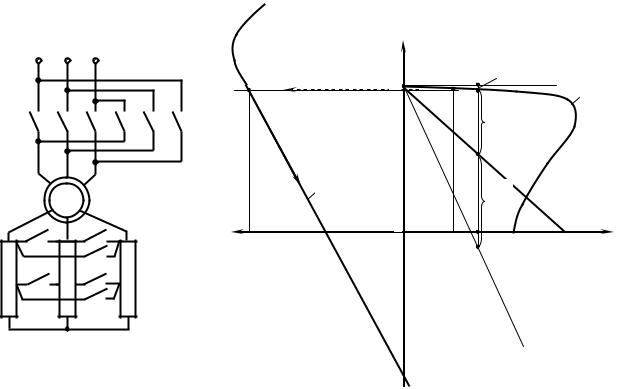
Схема включения асинхронного двигателя с фазным ротором в режиме противовключения показана на рис. 2.8, а, а механические характеристики естественная и противовключения – на рис. 2.8, б. Для получения противовключения контакторы КМ1, КМ3 и КМ4 отключаются и включается контактор КМ2.
~ 3 |
| s |
|
|
|
|
| 0 | sc | a | ρР |
|
|
| в | ест. | |
|
|
|
| ||
КМ1 | КМ2 |
|
| ρПУСК | |
|
|
|
| c |
|
М |
| пр |
|
| ρПР |
|
|
|
|
| |
|
| 1 | μс | d | |
КМ4 | –μ μТ.НАЧ. |
| е | μ=1 μ1 μ | |
rпуск |
|
|
|
|
|
КМ3 |
|
|
|
|
|
rпр |
|
|
|
|
|
2
Рис. 2.8. Схема управления асинхронным двигателем с торможением противовключением (а) и механические характеристики двигателя естественная и противовключения (б)
Наиболее просто сопротивление ступени противовключения определяется графическим способом. Порядок определения следующий (см.
рис. 2.8, б):
1. Задаются (или он должен быть задан) начальным тормозным моментом в пределах: μТ.НАЧ. ≤ 0,85тk .
47

2.Строят линейную часть механической характеристики торможения противовключением по двум точкам с координатами [s = sС, μ = μТ.НАЧ.]
и[s = 2, μ = 0].
3.В первом квадранте проводят прямую, параллельную механической характеристике торможения противовключением и находят точку пересечения её с прямой μ = 1, соответствующей номинальному моменту двигателя (точка «е»).
4.Находят численное значение сопротивления ступени противовключения в относительных единицах, которое равно отрезку, отсекаемому
при μ = 1 первой искусственной характеристикой при пуске двигателя (s = 0, μ = 0; s = 1, μ = μ1) и прямой, параллельной механической характеристике противовключения (отрезок «с–е»).
5. Определяютсопротивлениеступенипротивовключенияпоформуле rПР = adсе RРH .
48
8. Проверка низковольтной сети на возможность запуска электродвигателя
Для производственного потребителя находим объект, имеющий наибольшую установленную мощность двигателя Руст (определяем по приложению 1РУМ «Сельэнергопроект», 3 колонка таблицы). Сравниваем Руст на всех объектах и выбираем наибольшую мощность. Составляем схему электроснабжения этого объекта. Для асинхронного двигателя этой мощности выписываем из справочника паспортные данные. Измеряем на плане расстояние от ТП до данного объекта, выписываем марку и сечение провода. Все данные наносим на схему.
Методика проверки низковольтной сети на запуск двигателя описана и приведены примеры в (/2/ стр. 269-272)
Наиболее простой метод проверки описан в (/3/ стр. 230-231)
Пусковой ток асинхронного короткозамкнутого двигателя в 4…7 раз больше его номинального значения. Вследствие этого потеря напряжения в сети при пуске может в несколько раз превышать потерю при нормальной работе, а поэтому напряжение на двигателе будет значительно ниже, чем в обычном режиме.
При пуске электродвигателя напряжение па зажимах, с любого из работающих двигателей не должно снижаться больше, чем на 20% номинального напряжения сети. Если двигатель запускается от трансформатора через воздушную линию, потеря напряжения при пуске с учетом соединительной линии приблизительно равна:
 (26)
(26)
где ZC — полное сопротивление сети для пуска двигателя от трансформатора,
ZЭЛ — полное сопротивление короткого замыкания асинхронного электродвигателя.
 (27)
(27)
где ZЛ — полное сопротивление линии
ZТ — полное сопротивление трансформатора ( /1/ стр. 138 табл.7.1).
Сопротивление активное и индуктивное линий.


где г0 и х0 — удельное линейное активное и индуктивное сопротивление Ом/м
l – длина линии, м.
Полное сопротивление линии.
 (29)
(29)
Полное сопротивление короткого замыкания асинхронного электродвигателя определяется по формуле:
где UН — номинальное напряжение электродвигателя, кВ;
1Н — номинальный ток электродвигателя, А;
КП— кратность пускового тока электродвигателя.
Приведенный метод расчета дает приближенные результаты и пригоден для ориентировочных оценок возможности запуска электродвигателя в данных условиях. Точные расчеты требуют знания характеристик электродвигателей и приводимых ими рабочих машин, которые даны в специальной литературе.
Во всех случаях, когда начальный момент приводного механизма не превышает 1/3 номинального момента электродвигателя, допускаю понижение напряжения в момент пуска асинхронного короткозамкнутого электродвигателя на его зажимах до 30%. Этими условиями обычно удовлетворяют все приводы с ременной передачей, а из числа приводов с непосредственным соединением электродвигателя с механизмом- приводы центробежных насосом, вентиляторов и им подобные.
Пример расчета:
Наибольшую установленную мощность двигателя имеет водокачка (объект 16) запитанная линиями 9 и 10, а так же этот потребитель самый отдалённый от ЗТП. Мощность водокачки Р=8 кВт. Для этой мощности выписываем паспортные данные асинхронного электродвигателя:
Электродвигатель АИР32S4У3, Рн = 7,5 кВт, IH= 15,1 А, Кп=7,5, n = 1440 об/мин, КПД = 87,5%, cos φ = 0,86.
На плане измеряем расстояние от ТП до данного объекта, выписываем марку и сечение провода и заносим на рисунок 6.

Рисунок 28 – Схема электроснабжения водокачки
Определим полное сопротивление сети от трансформатора, Ом:
Zc= ZЛ+ Zт
где ZЛ – полное сопротивление линии, Ом
ZТ = 28,7 – полное сопротивление короткого замыкания трансфор-
матора, мОм, таблица 7.

где Rл – линейное активное исопротивление, мОм:
Rл = r0 ∙ L =
= 3,1 ∙ 186 = 50,4 мОм
где r0 = 3,1 мОм/м – удельное активное сопротивления для кабеля ААШВ 3х10+1х6;
L – длина линии до самого мощного двигателя, м.
Zc= 576,6 + (28,7/2) = 591 мОм=0,591 Ом
Определим полное сопротивление короткого замыкания электродвигателя, Ом.:
 ;
;
где IH– номинальный ток двигателя, А;
КП – кратность пускового тока.
 Ом
Ом
Определим по формуле потерю напряжения при запуске двигателя, %

Условие не выполняется, а следовательно электродвигатель не запустится, по этому на данной линии принимаем сечение на порядок выше / 11/, а именно кабель ААШВ 3х16+1х10 мм2. Произведем перерасчет с учетом принятого кабеля:
Определим линейное активное исопротивление, мОм
Rл = 1,94 ∙ 186 = 361 мОм
Определим полное сопротивление линии, Ом:
Zл = Rл = 361 мОм
Определим по формуле потерю напряжения при запуске двигателя, %

Условие выполняется, а следовательно двигатель запустится.