


«Бесколлекторные двигатели» ЛикБез и проектирование — Паркфлаер
Принцип работы электрического двигателя:В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник)
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм.
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете… Мягкой посадки 😀
Расчет КПД двигателя:
Очень хороший показатель… Хотя можно было еще выше добиться…
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)
Расчёт KV и намотка BLDC Brushless Моторов и калькулятор governor RPM
Если вы решили перемотать brushless мотор, то вы столкнётесь с массой проблем. В этой заметке я опишу по свежей памяти, какие муки будут вас поджидать!
Информация для изучения
В первую очередь я столкнулся с проблемой расчёта КВ (обороты на вольт). Но мне повезло, у меня есть «блат», я знаком с @pilot -ом, которого от съеденых на этом деле собак, уже тошнит) В итоге для расчета КВ на голом месте нужно намотать тестовую обмотку проводом какой есть под рукой, видел люди мотают витой парой, а затем измерить получившийся результат. Т.О. без прибора по определению кв, или хотя бы тахометра уже никуда.
Как подобрать метод намотки и коммутации при известном КВ тестовой обмотки?
На этот вопрос ответит @Pilot, а я допишу этот пробел))
Как выбрать способ намотки, способ коммутации?
В сети постоянно ведутся споры, какая схема намотки лучше, какая дает больше крутящего момента, а какая мощности и оборотов. Я пришел к выводу что лучше то, что подходит тебе по КВ. А вообще опытные мастера пишут что треугольник дает больше оборотов, а звезда больше крутящего момента.
Есть в сети отличный сайт, который генерирует иллюстрацию схемы намотки. Он просто шикарен и прост, но мне помог частично, т.к. при моей намотке подразумевался немного иной способ коммутации и намотки, который изначально мне посоветовал, опять же, опытный мотальщик, объясняя это более правильным расположением толстой жилы на зубе, что имеет огромное значение если мотаешь впритык. И более надежного способа намотки что б не промахнуться))
Как сгенерировать YY намотку двойной звездой?
- Введите кол-во зубов (Slots) и магнитов (Magnet Poles)
- Кликнуть advanced
- Скопировать схему намотки, Например: AabBCcAabBCc
- Кликнуть Clear наверху для очистки данных
- Заново ввести кол-во зубов и магнитов (но не жать Calculate)
- В поле Scheme block, вставить схему скопированную выше и ввести слэш «/» в центре схемы. Например: AabBCc/AabBCc
- Заменить D (дельта, треугольник) на Y(звезда) и кликнуть Calculate
Выводами же будут пары одинакового цвета!
Проблемы которые ждут тебя!))
Итак вот список проблем с которыми столкнулся я:
- Сразу встает проблема разобрать АККУРАТНО мотор. Нагреть сильно, или охладить? Мне помогло охлаждение для снятия статора с основы.
- Проблема найти подходящий провод. У нас найти провод можно на барахолках типа «Поле чудес», но там ребята его дорого продают) А надо же пробовать разные варианты.. Вдруг последний виток не влезет и опять ехать за проводом потоньше..
- Проблема выяснить наиболее оптимальный способ намотки и коммутации. Генераторы это круто, но когда берешься за дело, начинаешь спотыкаться на банальных вещах и ошибках. То витки не с той стороны посчитал, то лишний намотал.. очень много мароки.
- Проблема измерительного инструмента. Очень важно в любой момент померить КВ, желательно на каждой фазе, прозвонить на предмет КЗ, измерить сопротивление обмоток..
- Инструмент для намотки. Тут понадобиться всё) От китайской палочки для еды, до молотка с напильником и газовой горелки. Так же нужна термоусадка, термостойкие кембрики, термостойкий электротехнический лак, синяя изолента)
- Проблема собственно самой намотки. Когда ты берешь провод в 4 см длину и 1.5мм диаметром, то он перестает казаться мягким и податливым) Пальцы будут больно напоминать перебирать слова погрязнее, дабы хоть куда то девать энергию которая будет капать со лба прям на статор)))
- Итак вроде бы и всё! Ан нет! В любой момент может оказаться что где то ты таки нарушил изоляцию или коротнул на статор.. и вот тебе новые приключения.. У меня ушло на намотку времени МЕНЬШЕ, чем на коммутацию и сборку мотора.
Формула по подбору КВ для эффективного гувернения на kontronik jive PRO
3.14 * кол-во банок * КВ \ (осн шестерня \ пиньон) = обороты на 80% полке газа.
Данная заметка написана с большего для себя, что бы не забыть как всё не просто)
Но можете писать комментарии и вопросы.
А вот кое какие фото:
Бесколлекторные двигатели — Паркфлаер
Немного из истории:Главная проблема всех двигателей – это перегревание. Ротор вращался внутри какого-нибудь статора, и поэтому тепло от перегрева никуда не уходило. Людям пришла в голову гениальная идея: вращать не ротор, а статор, который при вращении охлаждался бы воздухом. Когда создали такой двигатель, он стал широко использоваться в авиации и судостроении, и поэтому его прозвали Вентильным двигателем.
Вскоре был создан электрический аналог вентильного двигателя. Назвали его бесколлекторным мотором, потому что у него не было коллекторов (щеток).
По конструкции бесколлекторные моторы делятся на две группы: inrunner (произносится как «инраннер») и outrunner (произносится как «аутраннер»). Двигатели первой группы имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели второй группы — «аутраннеры», имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами. Количество полюсов магнитов, используемых в бесколлекторных двигателях, может быть разным. По количеству полюсов можно судить о крутящем моменте и оборотах и двигателя. Моторы с двухполюсными роторами имеют наибольшую скорость вращения при наименьшем крутящем моменте.
Принцип работы.
В отличие от щёточного электродвигателя постоянного тока, коммутация в бесколлекторном двигателе (БД) осуществляется и контролируется с помощью электроники. Принцип работы БД основан на том, что контроллер БД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был под углом 120 градусов к вектору магнитного поля ротора.
(на катринке статор перепутан с ротором)
Электрическая машина состоит из неподвижной части — статора и подвижной части — ротора.
Применение.
Данный тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока.
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Создание бесколлекторного двигателя (1):
Однажды я уже писал про создание бесколлекторного двигателя из старого колекторного двигателя: http://www.parkflyer.ru/blogs/view_entry/598/
Испытания показали:
Тяга с винтом 8х6 = 533 грамма,
Частота вращения = 5433 об/мин,
Потребляемая мощность = 120 ватт (это только при холостом ходу!), а с винтом вообще 330 ватт. Это очень плохие показатели, и поэтому было решено создать новый с улучшенными характеристиками бесколлекторный двигатель. (его КПД = 23%)
Создание бесколлекторного двигателя (2):
На самом деле нельзя утверждать, что новый двигатель полностью создан мною, т.к. сделан он из старого, сломанного и сгоревшего бесколлекторного двигателя, можно сказать, что он восстановлен (починен и перемотан системой треугольника). Отличается он от первого тем, что у него вместо 3 зубьев 12, другая система обмотки и более правильная конструкция с использованием подшипников.
О том как перематывать двигатели я вам рассказывать не буду, а просто дам ссылку об этом: http://rc-aviation.ru/mtech/735-remont/1176-peremotka-dvigatelya, а также дам вам совет перематывайте не одной проволкой, а косичкой из нескольких, более тонких проволок.
Испытания показали:
Тяга с винтом 8х6 = 754 грамма,
Частота вращения = 11550 об/мин,
Потребляемая мощность = 9 ватт (без винта), 101 ватт (с винтом),
Мощность и КПД
Мощность можно вычислить вот таким способом:
1) Мощность в механике вычисляется по такой формуле: N= F*v, где F — сила, а v — скорость. Но так как, винт находится в статическом состояние, то движения нет, кроме вращательного. Если этот мотор установить на авиамодель, то можно было бы замерить скорость (она равна 12 м/с) и посчитать полезную мощность:
N полез= 7.54*12= 90.48 ватт
2) КПД электрического двигателя находится по такой формуле: КПД= N полезной/N затраченной *100%, где N затрат= 101 ватт
КПД= 90.48/101 *100%= 90%
В среднем КПД бесколлекторных двигателей реально и колеблется около 90% (самый большой КПД достигнутый данным видом моторов равен 99.68%)
Характеристики двигателя:
Напряжение: 11.1 вольт
Обороты: 11550 об/мин
Максимальная сила тока: 15А
Мощность: 200 ватт
Тяга: 754 грамм (винт 8х6)
Заключение:
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…
Модельно ориентированное проектирование. Электропривод с бесколлекторным двигателем постоянного тока
В предыдущей статье про модельно ориентированное проектирование было показано, что не все методики одинаково полезны. И объясняется как делать правильно, что бы не было потом мучительно больно. Но в конце статье был поставлен вопрос, провокационный как Шарон Стоун на допросе у следователей: модельно ориентированное проектирование это конечно хорошо, но как доказать, что модель соответствует объекту? Какие ваши доказательства?Общий ответ на данный вопрос еще готовится, но про частный зато реальный и свежий пример могу привести прямо сейчас. Оказался тут у меня в руках, как всегда случайно, текст от ведущего специалиста нашей страны по электроприводу Калачева Юрия Николаевича, автора книги Моделирование в электроприводе. Инструкция по пониманию. вместе с его любезным согласием на публикацию. Данный текст еще готовится к публикации в специализированных издания, но читатели хабра увидят его первые.
Далее под катом
Калачев Ю. Н., Ланцев В.Ю., Окулов Е.В.
Электропривод с бесколлекторным двигателем постоянного тока
(практика применения моделирования и кодогенерации в АО «Аэроэлектромаш»)
Ура, товарищи!!! Свершилось!!!
Наконец мы увидели плоды прогрессивных тенденций произросшие в отечественном приводостроении.
В статье рассматривается технология проектирования электропривода с использованием моделирования и кодогенерации. (Правильное модельно ориентированное проектирование)
Что касается моделирования – это вопрос для наших приводщиков не новый. А вот автоматическую кодогенерацию программы контроллера электропривода из его модели, и в мировом масштабе, мало кто пробовал.…
Мы смеем утверждать, что эта полезная тенденция (автоматического написания программы другой программой) будет активно развиваться в будущем цифровом мире …. Выиграет тот — кто начнет раньше.
Хотим оговориться, что кодогенерация, на наш взгляд не отменяет и не заменяет программиста, а только помогает ему. При этом, естественно, считаем, что СИ-код сгенерированной программы должен быть для него открыт.
Так и поступаем, результат автоматической генерации кода — код Си, открытый для просмотра и анализа.
В нашем случае, объектом управления являлся некий электропривод с бесколлекторным двигателем постоянного тока (БДПТ), вал которого соединен с редуктором, превращающим вращение в поступательное движение штока.
Задача электропривода достаточно стандартная – позиционировать вал штока, желательно побыстрее и поточнее … Часто такие привода используются для управления рулями беспилотных летательных аппаратов.
Блок управления устройством был спроектирован и изготовлен в отделе электропривода АО «Аэроэлектромаш» на базе микроконтроллера 1986ВЕ1Т (АО «ПКК Миландр»). Необходимо было создать алгоритмику и программу управления контроллера с целью дальнейшего ее использо-вания в практических задачах.
Работа была выполнена совместно специалистами компании «3В-сервис» и сотрудниками отдела электропривода АО «Аэроэлектромаш».
Первая задача, которая стояла перед нашим коллективом – идентификация объекта управления. Для этого были проведены некоторые измерения характеристик двигателя, которые оказались достаточно специфичными.
Например, измеренная ЭДС двигателя имела весьма причудливую форму, представленную на Рис.1.<br?
Рисунок 1. Измеренная ЭДС двигателя.
Если читатель знаком с программой Simulink, то ему известно, что там, в модели двигателя с постоянным и магнитами, имеется возможность выбора синусоидальной или трапецеидальной ЭДС.
Ну, и куда бедному крестьянину податься? Где здесь синус, и где трапеция? (Правильные средства моделирования должны быть открытыми!). В среде SimInTech можно учесть даже такие неидеальности двигателя. Нами была задана форма ЭДС представленная на Рис.2
Рисунок 2. ЭДС двигателя созданная в SimInTech
Найдите два отличия в Рис.1 и Рис.2. Мы нашли одно – цвет.
Следующей особенностью двигателя оказался его существенный зубцовый момент, обусловленный геометрией магнитопровода статора и отсутствием скоса пазов у магнитов ротора. Момент был измерен экспериментально и введен в модель. График зубцового момента показан на Рис.3.
Рисунок 3. Зубцовый момент.
Кроме того в модели двигателя были учтены потери на намагничивание, что отсутствует в математических моделях у других разработчиков моделирующих программ.
Далее работа электропривода сравнивалась с результатами моделирования в тестовых режимах. Ниже на Рис. 4 и 5 приведены результаты опыта холостого хода (максимальная частота без нагрузки).
Рисунок 4. Холостой ход. Реальный двигатель.
Рисунок 5. Tок фазы холостой ход. Результат моделирования.
Вывод:
Осциллограммы реального и модельного холостого хода совпадают. Визуально разницы не видно.
После успешного опыта холостого хода был проведен опыт динамического воздействия на двигатель с присоединенным редуктором. В этом опыте на обмотки двигателя подавалось постоянное напряжение с реверсом на частоте 30 Гц. При этом выходное звено совершало колебания с той же частотой. На Рис.6 приведены результаты этого опыта:
Рисунок 6. Реальный двигатель под нагрузкой
(Сигналы снимались с помехами. Высокочастотное дрожание и размытие – это помехи в сигналах датчиков положения и тока).
Полученные данные сравнивались с моделью привода, работающей в аналогичном режиме (Рис.7).
Рисунок 7. Работа модели под нагрузкой
Выводы:
Вид верифицированной модели силовой и механической части электропривода построенной на стандартных элементах библиотек программы SimInTech представлен на Рис.8.
Рисунок 8. Схема комплексной модели электроопривода, включая механическую часть.
Она и состоит из моделей:
- силового инвертора
- двигателя с датчиком положения ротора (ДПР)
- механической передачи
- датчика тока
- нагружателя
Убедившись, что поведение модели соответствует поведению реального изделия, по результатам моделирования можно выбрать необходимую структуру системы регулирования (СУ) и произвести ее настройку для разных типов, перечисленных в техническом задании, входных воздействий.
В нашем случае хорошие результаты показала двухконтурная система регулирования положения с демпфирующей связью по скорости. Вид модели этой структуры представлен на Рис.9.
Рисунок 9. Расчетная схема программы управления электроприводом.
При дальнейшем использовании кодогенерации нет необходимости в ручном кодировании алгоритмов системы регулирования — готовый проект в среде разработке Keil uVision создается автоматически. После сборки бинарного образа программы ее можно транслировать в наш процессор (1986ВЕ1Т).
Заметим, что блоки модели «Выбор Ключей», «Инициализация периферии», «АЦП», «АЦП SSP2» в режиме моделирования реализуют соответствующие математические модели, а при кодогенерации заменяются библиотеками работы с периферией используемого процессора.
После выбора структуры СУ и ее настройки нам оставалось:
- осуществить автоматическую кодогенерацию программы
- записать полученную программу в контроллер
- зафиксировать великолепный результат
По Рис.10 можно сравнить работу модели и реального привода. В качестве задания по положению использовалась синусоида частотой 3 Гц и амплитудой 3мм.
Для получения данных с контроллера в его программе была предусмотрена специальная часть, обеспечивающая считывание внутренних сигналов по последовательному интерфейсу. Пользователь во время работы привода в окне SimInTech видит результаты работы встроенного ПО.
Рисунок 10. Сравнение работы модели и реального привода.
Ну, здесь даже цвет одинаковый ….
Ура, товарищи!!! Свершилось!!!
Всем кому интересна тема электропривода рекомендуем скачать бесплатно книгу Калачев Ю.Н Моделирование в электроприводе.
Регуляторы хода для бесколлекторных моторов
Автор — Сергей Потупчик (serj)Вступление
Данная статья посвящена практическим аспектам применения регуляторов хода (далее — контроллеров) для бесколлекторных моторов, и особенностям их эксплуатации.
Бесколлекторные моторы, и соответственно регуляторы хода для них можно разделить на 2 основных класса — с датчиками положения ротора и без них. Бездатчиковые проще в изготовлении, поэтому большинство моторов и контроллеров в настоящее время именно такие (кроме специальных автомодельных). Далее речь пойдет именно о бездатчиковых регуляторах хода.
Большинство применяемых в моделизме бесколлекторных моторов построены по принципу «вывернутого наизнанку» коллекторного двигателя: статор с обмотками неподвижен, а ротор с постоянными магнитами вращается. Количество обмоток – всегда три.
Среди бесколлекторных моторов для моделизма можно выделить две основные группы — с внутренним ротором, где постоянный магнит вращается внутри обмоток, и с внешним ротором (outrunner). Последние имеют, как правило, большее количество магнитных полюсов, и больший крутящий момент по сравнению с моторами с внутренним ротором, что позволяет применять их на авиамоделях без использования редуктора — они могут «напрямую» крутить винты большого диаметра.
Основные характеристики контроллеров
Максимальный постоянный (сontinius) ток – указывает, какой ток контроллер способен держать продолжительное время. Как правило, этот параметр входит в обозначение контроллера (например Jes -18, Phoenix -10). Иногда указывают величину «кратковременного» тока, допустимого в течении нескольких секунд.
«Кратковременный» ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии.
Максимальное рабочее напряжение — указывается, с каким количеством NiCd или литий-полимерных банок можно использовать контроллер. Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Максимальные обороты (maximum rpm) — программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много… Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока — мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора ли контроллера.
Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода.
Частота импульсов контроллера (PWM Frequency) — как правило, составляет 7-8 Кгц. У «продвинутых» контроллеров частоту регулирования можно программировать на другие значения- 16 и 32 Кгц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения.
Особенности подключения
Провода — не такое простое дело, как может показаться на первый взгляд. Есть несколько важных аспектов.
Самое главное — нельзя делать провода от контроллера до аккумулятора большой длины! Дело в том, что стартовые токи беколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие броски тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители ставят обычные.
При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и «повисает» процессор контроллера). Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора — контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки.
Настройки
Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют.
Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
Тип выключения мотора (cut-off voltage) – как правило имеет 2 значения — плавный (soft cut-off) и жесткий (hard cut-off).
При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего.
При жестком — мотор немедленно останавливается если зафиксированно падение напряжения ниже заданного. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора.
Тормоз (brake) – торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот… Намудрили чехи, однако.
Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Для двухполюсных моторов при увеличении опережения обороты и мощность на максимальных оборотах растут, а общий КПД падает. Для двух и 4-х полюсных моторов с внутренним ротором рекомендуют значения от 5 до 15 градусов. При больших значениях опережения мощность практически не растет, а КПД падает на 3-5% — это важно для соревнований, где счет идет именно на эти проценты.
Для многополюсных моторов с внешним ротором ситуация иная — для них оптимальным по КПД и мощности является опережение 25-30°. При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик — около 3%. Как говорится — в полете не заметно, но осознавать приятно…
Режим старта (start mode) — не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается.
Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа.
Ограничение тока (Curent limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться. Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами.
Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от ручки газа. Может иметь значения автокалибровки ( auto calibrating ) – при этом контроллер самостоятельно определяет положение малого и полного газа, а также фиксированный ( fixed ) — когда характеристика задана производителем.
Также в некоторых контроллерах присутствует режим «гувернер» (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель.
Реверс (reverse) — смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
В некоторых контроллерах, например в Kontronik серии «Beat», нет отдельных настроек параметров, но есть выбор комплексных режимов – планер, самолет, корабль, вертолет и даже автомобиль с задним ходом!
Программирование
Тут совет один — читайте внимательно инструкцию. Как правило, вход в режим программирования делается таким образом, что при нормальном использовании включить его очень затруднительно. В некоторых контроллерах для программирования есть специальные перемычки (джамперы), а создатели Castle Creations предусмотрели кроме обычного (с передатчика), программирование через компьютер, с помощью специального USB адаптера, подключаемого к контроллеру через разъем для приемника — просто и гораздо удобней, чем считать вспышки светодиода или писки мотора…
Из нюансов следует отметить, что у некоторых контроллеров, например ТММ, процедуру программирования следует провести до конца — все параметры записываются в конце цикла программирования, а у других — например Castle Creations — программирование можно закончить в любой момент.
Возможные проблемы
Как показывает практика — 70% проблем при использовании контроллеров связано со стартом двигателей. Если мотор у вас плохо стартует, то есть начинает вращаться, а потом останавливается — большинство причин кроется в больших бросках тока и как следствие, провалах питающего напряжения. В первую очередь проверьте провода до батареи. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче.
Далее — попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если на хостом ходу все в порядке, а при установке пропеллера мотор упорно не желает крутится, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации. Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Старые «золотые» Jeti серия Jes 18, отличаются, например одной особенностью — у них нет плавного выключения, и при попытке работы мотора с большими пусковыми токами от старых аккумуляторов, при резком движении ручкой газа мотор останавливается, если напряжение упало до 5.2 вольта. Это не неисправность контроллеров, это у них такой алгоритм выключения мотора: напряжение упало — мотор остановился…
Иногда бывает, что мотор стартует в другую сторону, набирает примерно 20-30% оборотов, потом «одумывается», и резко начинает крутится в нужном направлении. Останов и реверс сопровождаются резким броском тока, иногда срабатывает токовая защита. Данная ситуация происходит только с 2-3х витковыми двухполюсными спортивными моторами при наличии резкого старта. Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
О выключателях
Наличие выключателя в контроллере — это дополнительное удобство, позволяющее не залезать каждый раз вовнутрь модели, чтобы включить или выключить аппаратуру. Некоторые производители контроллеров не ставят выключателей на контроллеры предназначенные для токов ниже 40А, таковы например Castle Creations и Astro Flight.
Привлекает решение проблемы выключателей у контроллеров ТММ. У них каждая модель имеет версию с выключателем и без. Причем выключатель электронный, работает на размыкание, и если он в полете случайно оторвется (что вообще-то трудно себе представить) то контроллер и аппаратура останется включенной. Если контроллер ТММ забыть выключить, он при отсутствии сигнала с приемника начнет попискивать мотором. Подобная функция есть и у Astro Flight.
Про «выключатель» у контроллеров Jeti уже упоминалось в статье про литий- полимерные аккумуляторы, он выключает лишь питание приемника, контроллер при этом всегда включен. И не подает никаких сигналов об этом постепенно разряжая «в ноль» батарею, что для литиевых аккумуляторов заканчивается фатально.
Производители контроллеров
Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.
Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж.
Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik.
Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби.
Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично…
При выборе контроллера главный совет — внимательно изучите все характеристики приглянувшейся вам модели. У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
Заключение
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…
Обсудить на форумепринцип работы, управление бесколлекторными электродвигателями. Бесколлекторный электродвигатель своими руками
Применяются бесколлекторные электродвигатели в медицинской технике, авиамоделировании, трубозапорных приводах нефтепроводов, а также во многих других отраслях. Но у них имеются свои недостатки, особенности, а также преимущества, которые порой играют ключевое значение при проектировании различных устройств. Как бы то ни было, такие электродвигатели занимают относительно малую нишу, если сравнивать их с асинхронными машинами переменного тока.
Особенности электромоторов
Одна из причин, по которой конструкторы проявляют интерес именно к бесколлекторным электродвигателям — это необходимость в высокооборотных моторах с небольшими размерами. Причём у этих двигателей очень точное позиционирование. В конструкции имеется подвижный ротор и неподвижный статор. На роторе находится один постоянный магнит или несколько, расположенных в определённой последовательности. На статоре же находятся катушки, которые создают магнитное поле.
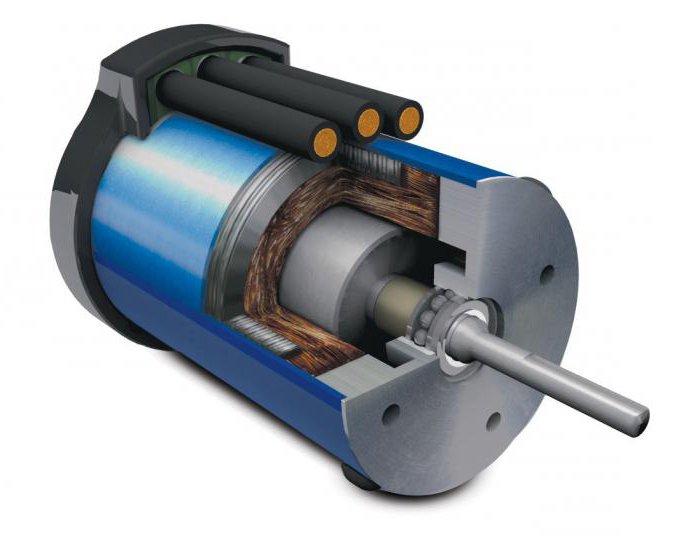
Нужно отметить еще одну особенность — бесколлекторные электродвигатели могут иметь якорь, расположенный как внутри, так и на внешней стороне. Следовательно, два типа конструкции могут иметь определенное применение в различных сферах. При расположении якоря внутри получается добиться очень высокой скорости вращения, поэтому такие моторы очень хорошо работают в конструкциях систем охлаждения. В том случае, если устанавливается привод с внешним расположением ротора, можно добиться очень точного позиционирования, а также высокой устойчивости к перегрузкам. Очень часто такие моторы используются в робототехнике, медицинском оборудовании, в станках с частотным программным управлением.
Как работают моторы
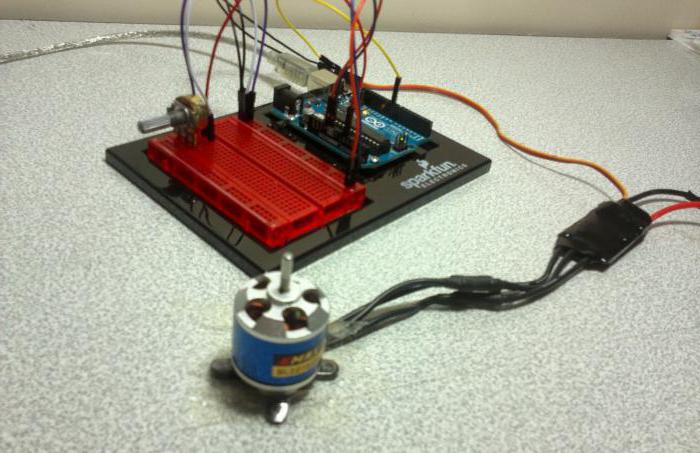
Для того чтобы привести в движение ротор бесколлекторного электродвигателя постоянного тока необходимо использовать специальный микроконтроллер. Его не получится запустить таким же образом, как синхронную или асинхронную машину. При помощи микроконтроллера получается включить обмотки двигателя так, чтобы направление векторов магнитных полей на статоре и якоре были ортогональны.
Другими словами, при помощи драйвера получается регулировать момент вращения, который действует на ротор бесколлекторного двигателя. Чтобы переместить якорь необходимо осуществить правильную коммутацию в обмотках статора. К сожалению, обеспечить плавное управление вращением не получается. Зато можно очень быстро увеличить скорость вращения ротора электродвигателя.
Отличия коллекторных и бесколлекторных двигателей
Основное отличие заключается в том, что на бесколлекторных электродвигателях для моделей отсутствует обмотка на роторе. В случае с коллекторными электромоторами, на их роторах имеются обмотки. А вот постоянные магниты устанавливаются на неподвижной части двигателя. Кроме того, на роторе устанавливается специальной конструкции коллектор, к которому производится подключение графитовых щёток. С их помощью подается напряжение на обмотку ротора. Принцип работы бесколлекторного электродвигателя тоже существенно отличается.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.

Скорость вращения ротора зависит напрямую от того, насколько интенсивно магнитное поле, а последняя характеристика зависит напрямую от величины напряжения. Следовательно, чтобы увеличить или уменьшить частоту вращения, необходимо изменить напряжение питания.
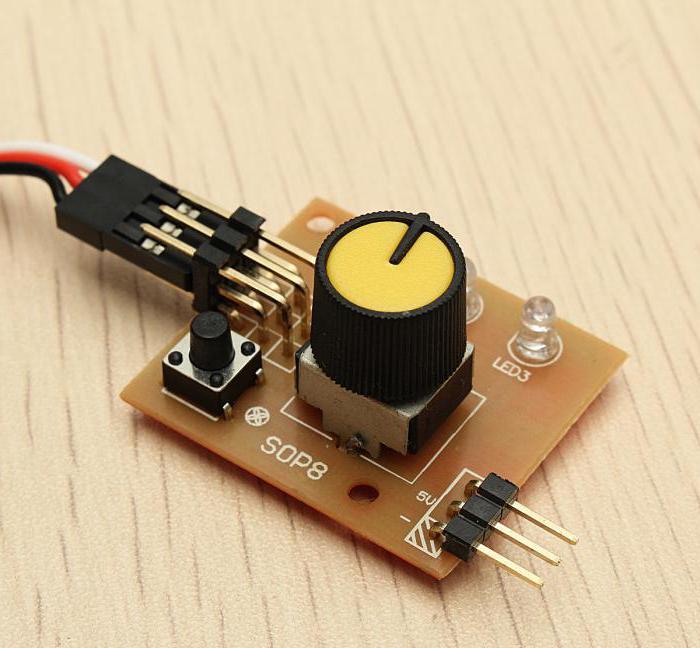
Для реализации реверса потребуется только лишь изменить полярность подключения мотора. Для такого управления не нужно использовать специальные микроконтроллеры, изменять частоту вращения можно при помощи обычного переменного резистора.
Особенности бесколлекторных машин
Но вот управление бесколлекторным электродвигателем невозможно без использования специальных контроллеров. Исходя из этого, можно сделать вывод, что в качестве генератора моторы такого типа применяться не могут. Для эффективности управления можно отслеживать положение ротора с помощью нескольких датчиков Холла. При помощи таких несложных устройств получается значительно улучшить характеристики, но стоимость электродвигателя увеличится в несколько раз.
Запуск бесколлекторных моторов

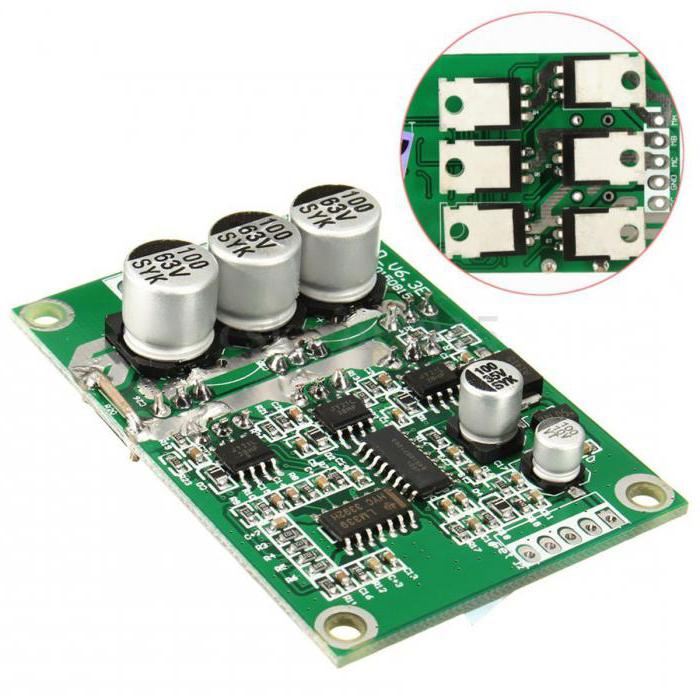
Изготавливать микроконтроллеры самостоятельно нет смысла, намного лучшим вариантом окажется покупка готового, пусть и китайского. Но необходимо придерживаться следующих рекомендаций при выборе:
- Учитывайте максимально допустимую силу тока. Этот параметр обязательно пригодится для различных видов работы привода. Характеристика часто указывается производителями непосредственно в названии модели. Очень редко указываются значения, характерные для пиковых режимов, в которых микроконтроллер не может работать продолжительное время.
- Для продолжительной работы необходимо учитывать и максимальную величину напряжения питания.
- Обязательно учитывайте сопротивление всех внутренних цепей микроконтроллера.
- Обязательно нужно учитывать максимальное число оборотов, которое характерно для работы этого микроконтроллера. Обратите внимание на то, что он не сможет увеличить максимальную частоту вращения, так как ограничение сделано на уровне программного обеспечения.
- Дешёвые модели микроконтроллерных устройств имеют частоту генерируемых импульсов в интервале 7…8 кГц. Дорогие экземпляры можно перепрограммировать, и этот параметр увеличивается в 2-4 раза.
Старайтесь подбирать микроконтроллеры по всем параметрам, так как они влияют на мощность, которую может развить электродвигатель.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.
В том случае, если нет таких устройств, необходимо считывать обратное напряжение. Оно генерируется в катушках статора, не подключенных на данный момент времени. Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током. Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи. Они позволяют из постоянного напряжения сделать трехфазные импульсы.

Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Преимущества использования
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы. Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
Среди недостатков можно выделить очень высокую стоимость, если учитывать еще и цену контроллера. Даже кратковременно включить для проверки работоспособности такой электродвигатель не получится. Кроме того, ремонтировать такие моторы намного сложнее из-за их особенностей конструкции.