


Схема пуска двигателя с фазным ротором, функции тока.
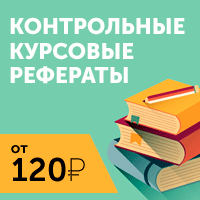
Схема подключения асинхронным двигателем с фазным ротором в функции тока представлена на рисунке 1. Для контроля пуска по току применяют токовые реле, которые срабатывают при пусковом токе и отпадают при минимальном токе переключения.
Пуск двигателя.
 Рисунок 1 — Cхема пуска двигателя с фазным ротором, функции тока.
Рисунок 1 — Cхема пуска двигателя с фазным ротором, функции тока.Автоматическим выключателем QF напряжение подается на управляющую и силовую цепь. После нажатия кнопки “Пуск” SB1, подключается магнитный пускатель КМ3, который срабатывая, шунтирует кнопку пуска, и подключает к питающей сети катушку блокировочного реле KL. Нормально разомкнутый контакт реле KL подает питание на пускатели КМ1, КМ2. Собственное время срабатывания реле тока КА1 и КА2 меньше, чем соответствующих контакторов КМ1 и КМ2, поэтому реле тока срабатывает раньше, и пуск двигателя осуществляется с полностью введённым сопротивлением в цепь ротора.
В начальный момент пуска асинхронного двигателя с фазным ротором пусковой ток максимален, следовательно, срабатывает токовое реле КА1, которое своими разомкнутыми контактами не даёт сработать реле КМ1. По мере разгона двигателя пусковой ток уменьшается до значения уставки КА1 при котором КА1 отключается замыкая свои нормально замкнутые контакты, позволяя сработать реле КМ1 которое шунтирует первую ступень резистора. Одновременно замыкается блокировочный контакт КМ1, что ставит катушку контактора КМ1 на «самоподхват» при размыкании контакта КА1. После шунтирования первой ступени резистора ток снова возрастает до максимального значение, что вызывает срабатывание реле КА2 которое препятствует срабатыванию реле КМ2. После дальнейшего разгона двигателя ток снижается до тока срабатывания реле КА2 которое “отключившись” подключает к напряжению магнитный пускатель КМ2. При этом шунтируется вторая ступень пускового резистора.
Cхема подключения двигателя с фазным ротором, функции времени.
Пуск двигателя с фазным ротором
Пусковые характеристики асинхронного мотора зависят от особенностей его конструкции, а именно от устройства ротора.
Запуск асинхронного мотора сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент мотора уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного мотора имеет место завышенное потребление электронной энергии из питающей сети, затрачиваемое не только лишь на преодоление приложенного к валу тормозного момента и покрытие утрат в самой асинхронном движке, да и на сообщение передвигающимся звеньям производственного агрегата определенной кинетической энергии. Потому при пуске асинхронный движок должен развить завышенный крутящий момент.
Для асинхронного мотора с фазным ротором исходный пусковой момент, соответственный скольжению sп= 1, находится в зависимости от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
Рис. 1. Запуск трехфазного асинхронного мотора с фазным ротором: а — графики зависимости крутящего момента мотора с фазным ротором от скольжения при разных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного мотора с замкнутыми накоротко контактными кольцами, исходный пусковой момент Мп1 = (0,5 -1,0) Мном, а исходный пусковой ток Iп = (4,5 — 7) Iном и поболее.
Малый исходный пусковой момент асинхронного электродвигателя с фазным ротором возможно окажется недостающим для приведения в действие производственного агрегата и следующего его ускорения, а значимый пусковой ток вызовет завышенный нагрев обмоток мотора, что ограничивает частоту его включений, а в маломощных сетях приводит к ненужному для работы других приемников временному снижению напряжения. Эти происшествия могут явиться предпосылкой, исключающей внедрение асинхронных движков с фазным ротором с огромным пусковым током для привода рабочих устройств.
Введение в цепь ротора мотора регулируемых резисторов, именуемых пусковыми, не только лишь понижает исходный пусковой ток, но сразу наращивает исходный пусковой момент, который может добиться наибольшего момента Mmax (рис. 1, а, кривая 3), если критичное скольжение мотора с фазным ротором
sкр = (R2′ + Rд‘) / (Х1 + Х2‘) = 1,
где Rд‘ — активное сопротивление резистора, находящегося в фазе обмотки ротора мотора, приведенное к фазе обмотки статора. Предстоящее повышение активного сопротивления пускового резистора нецелесообразно, потому что оно приводит к ослаблению исходного пускового момента и выходу точки наибольшего момента в область скольжения s > 1, что исключает возможность разгона ротора.
Нужное активное сопротивление резисторов для запуска мотора с фазным ротором определяют, исходя из требований запуска, который может быть легким, когда Мп = (0,1 — 0,4) Mном, обычным, если Мп — (0,5 — 0,75) Мном, и томным при Мп ≥ Мном.
Для поддержания довольно огромного крутящего момента движком с фазным ротором в процессе разгона производственного агрегата с целью сокращения продолжительности переходного процесса и понижения нагрева мотора нужно равномерно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электронными и механическими критериями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рис. 2), также ускорение.
Рис. 2. Пусковые свойства трехфазного асинхронного мотора с фазным ротором
Переключение пусковых резисторов обеспечено последовательным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента запуска мотора, когда в процессе разгона крутящий момент М становится равным моменту переключения М2. Благодаря этому в протяжении всего запуска все пиковые моменты получаются схожими и все моменты переключения равны меж собой.
Так как крутящий момент и ток асинхронного мотора с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Отключение асинхронных движков с фазным ротором от питающей сети всегда делают при цепи ротора, замкнутой накоротко, во избежание возникновения перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения мотора окажется разомкнутой.
Асинхронный двигатель с фазным ротором: устройство, принцип работы (видео)
Асинхронный двигатель с фазным ротором имеет очень обширную область обслуживания. АД (асинхронный двигатель) чаще применяется в управлении двигателями большой мощности. Обслуживание и управление приводов мельниц, станков, насосов, кранов, дымососа, дробилок. Асинхронный двигатель с массивным ротором даёт возможность подключения множества технических механизмов.
Характеристика асинхронного двигателя
 Преимущества использования:
Преимущества использования:
- Запуск двигателя с нагрузкой, подключение к валу благодаря созданию большого момента вращения. Это обеспечивает обслуживание асинхронных двигателей с фазовым элементом любой мощности.
- Возможность постоянной скорости вращения большой или маленькой нагрузки
- Регулирование автоматического пуска.
- Работа даже при перегрузке тока напряжения.
- Простота использования.
- Невысокая стоимость.
- Надёжность применения.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
Недостатки применения
- Использование резисторов увеличивается стоимость, а работа двигателя усложняется,
- Большие размеры,
- Значение КПД меньше, чем короткозамкнутых роторов,
- Трудное управление скоростью вращения,
- Регулярный капитальный ремонт .
Схема подключения
При подключении к току начинают работать реле времени. Контакты размыкаются. При нажатии тумблера происходит пуск.

Чтобы подключить АД нужно правильно обозначить концы и начала обмоток фазы.
Устройство двигателя
Главными постоянными являются статор и ротор. Статор представляет собой цилиндр, состав –листы электротехнической стали, в цилиндр уложена трёхфазная обмотка. Она состоит из обмоточной проволоки. Которые соединены между собой в виде звезды или треугольника в зависимости от напряжения.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру

Ротор – основная вращающаяся часть двигателей. Он в зависимости от расположения может быть внешним, внутренним. Данный элемент состоит из стальных листов. Пазы сердечника наполнены алюминием, который имеет стержни, содержащие торцевые кольца. Они могут быть латунными или стальными, каждое из них изолировано слоем лака. Между трёхфазным статором и ротором образуется зазор. Регулирование размер зазора от 0,30 –0,34 мм в устройствах с небольшим напряжением, 1,0–1,6 мм в устройствах с большим постоянным электрическим напряжением. Конструкция имеет название беличья клетка. Для мощных двигателей используется медь в сердечнике. Контактор начинает действие, двигатель заводится.
Существует добавочный резистор в цепи обмотки вращающей части машины, крепится с помощью металлографитных щеток. Щетки обычно используются две, расположены на щеткодержателе. В приводах кранах и центрифугах для регулирования роботы применяется конический подвижный ротор. Асинхронные двигатели с фазным ротором незаменимы при технических требованиях мощного пускового момента. Это могут быть такие механизмы, как кран, мельница, лифт.

Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
Схема переключения электрической цепи со звезды на треугольник
Принцип работы
В основе АД лежит вращение поля магнитов. В область обмотки трёхфазного статора поступает ток, а в фазах возникает поток магнитов, изменяемый в зависимости от скорости и частоты постоянной электрической мощности. При статорном вращении возникает электродвижущая сила.
В роторную обмотку подходит напряжение, которое совместно с постоянным магнитным потоком статора образует пуск. Он стремится направить ротор по магнитному вращению статора и при достижении превышения момента торможения, приводит к скольжению. Оно выражает отношение между частотами статорного силового поля магнитов и скоростью роторного вращения.

Чертеж режима кз
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
При балансе между моментами электромагнита и торможения, перемена значений остановится. Особенность эксплуатации АД – сольватация кругового движения силового поля статора и им наводящих токов в роторе. Момент вращения возникает лишь при разнице частот круговых движений магнитных полей.
Машины различают синхронные, асинхронные. Разница механизмов в их обмотке. Она образует магнитное поле.
Неподвижность ротора и замыкание обмотки приводит к короткому замыканию (кз).
Расчёт числа повторений
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
Данные расчета считаются по формуле:
m1=60f1/p
f1– частота электричества$
p – количество полюсных пар каждой обмотки статора.
m2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
(m2≠m1)
Асинхронный электродвигатель работает только при асинхронной частоте.
(m2<,m1)
При одновременном вращении статора и ротора, расчет скольжения будет равняться нулю.
Двухроторный АД используется для привода разных механизмов. Различие двухроторного двигателя заключается присутствием в конструкции двух роторов. Второй ротор выполняет функцию вспомогательную, может вращаться с другой скоростью. Вспомогательный ротор представляет собой внутренний хомут для замыкания постоянного потока магнитов, охлаждения электродвигателя. Недостаток двухмоторного асинхронного двигателя в низком КПД от использования ферромагнитного вспомогательного ротора.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
В ходе исследования двухроторных машин достигаются близкие данные скоростик желаемым, когда вспомогательный ротор имеет максимальные вентиляционные зазоры. Полый ротор установлен на ступице, его вал расположен внутри цилиндра. При вращении вспомогательного ротора вентиляция работает по принципу центробежного вентилятора. Для увеличения пускового момента и большей электрической нагрузки полый ротор должен регулироваться, перемещаясь вдоль вала, с установленным штифтом, конец чего входит в паз ступицы ротора.
Данные для расчета:

Реостатный пуск
Часто для включения двигателя безмощных пусковых моментов оказывают нужное действие реостаты. Схема реостатного способа:
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру

Главной характеристикой метода является присоединение двигателя при пуске к реостатам. Реостаты разрываются (на чертеже К1), на них идет частично электрический ток. Что дает возможность уменьшить пусковые токи. Пусковой момент тоже снижается. Преимущество реостатного способа заключается в снижении нагрузки на механическую часть и нехватку напряжения.
Ремонт и характеристики неисправностей
Причиной ремонта могут служить внешние и внутренние причины.
Внешние причины ремонта:
- обрыв провода или нарушение соединений с электрическим током,
- сгорание предохранителей,
- понижение или повышения напряжения,
- перегруженность АД,
- неравномерная вентиляция в зазоре.
Внутренняя поломка может возникнуть по механическим и электрическим причинам.
Механические причины ремонта:
- неправильное регулирование зазора подшипников,
- повреждение вала ротора,
- расшатывание щеткодержателей,
- возникновение глубоких выработок,
- истощение креплений и трещины.
Электрические причины ремонта:
- замыкания витков,
- поломка провода в обмотках,
- пробивание изоляции,
- пробой пайки проводов.
Данные причины – это далеко не полный список поломок.
Асинхронный двигатель – незаменимый и важный механизм, применяемый для обслуживания быта и различных отраслей промышленности. Для практического действия АД с фазным ротором необходимо знать техническую характеристику управления, использовать его по назначению и регулярно проводить ремонт при технических осмотрах. Тогда асинхронный двигатель станет практически вечной эксплуатации.
§ 15.2. Пуск двигателей с короткозамкнутым ротором
Пуск непосредственным включением в сеть (рис. 15.3). Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей
Рис. 15.3. Схема непосредственного включения в сеть (а) и графики изменения тока и момента при пуске (б) асинхронного двигателя с короткозамкнутым ротором
мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
Пуск при пониженном напряжении. В соответствии с (15.1) пусковой ток двигателя пропорционален подведенному напряжению U1, уменьшение которого вызывает соответствующее уменьшение пускового тока. Существует несколько способов понижения подводимого к двигателю напряжения. Рассмотрим некоторые из них.
Для
асинхронных двигателей, работающих при
соединении обмоток статора треугольником,
можно применить пуск переключением
обмотки статора со звезды на треугольник
(рис. 15.4, а). В момент подключения двигателя
к сети переключатель ставят в положение
«звезда», при котором обмотка статора
оказывается соединенной в звезду. При
этом фазное напряжение на статоре
понижается
в  раз. Во столько же раз уменьшается и ток
в фазных обмотках двигателя (рис.
15.4, б). Кроме того, при соединении обмоток
звездой линейный ток равен фазному, в
то время как при соединении этих же
обмоток треугольником линейный ток
больше
фазного
в
раз. Во столько же раз уменьшается и ток
в фазных обмотках двигателя (рис.
15.4, б). Кроме того, при соединении обмоток
звездой линейный ток равен фазному, в
то время как при соединении этих же
обмоток треугольником линейный ток
больше
фазного
в  раз. Следовательно, переключив обмотки
статора звездой, мы добиваемся уменьшения
линейного тока в (
раз. Следовательно, переключив обмотки
статора звездой, мы добиваемся уменьшения
линейного тока в ( )2 = 3 раза.
)2 = 3 раза.

Рис. 15.4. Схема включения (а) и графики изменения момента и тока (фазного) при пуске (б) асинхронного двигателя с короткозамкнутым ротором переключением обмотки статора со звезды на треугольник
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Возникший при этом бросок тока до значения I/пΔ является незначительным.
Рассмотренный
способ пуска имеет существенный
недостаток —
уменьшение
фазного напряжения в  раз сопровождается уменьшением пускового
момента в три раза, так как, согласно
(13.19), пусковой момент асинхронного
двигателя прямо пропорционален
квадрату напряженияU1.
Такое значительное уменьшение
пускового момента не позволяет применять
этот способ пуска для двигателей,
включаемых в сеть при значительной
нагрузке на валу.
раз сопровождается уменьшением пускового
момента в три раза, так как, согласно
(13.19), пусковой момент асинхронного
двигателя прямо пропорционален
квадрату напряженияU1.
Такое значительное уменьшение
пускового момента не позволяет применять
этот способ пуска для двигателей,
включаемых в сеть при значительной
нагрузке на валу.
Описанный
способ понижения напряжения при пуске
применим лишь для двигателей,
работающих при соединении обмотки
статора треугольником. Более универсальным
является способ с понижением подводимого
к двигателю напряжения посредством
реакторов (реактивных катушек —
дросселей). Порядок включения
двигателя в этом случае следующий (рис.
15.5, а). При разомкнутом рубильнике 2
включают рубильник 7. При этом ток из
сети поступает в обмотку статора через
реакторы Р, на которых происходит падение
напряжения j хр (где хр — индуктивное сопротивление реактора,
Ом). В результате на обмотку статора
подается пониженное напряжение
хр (где хр — индуктивное сопротивление реактора,
Ом). В результате на обмотку статора
подается пониженное напряжение
После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным.
Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U/1/ U1ном
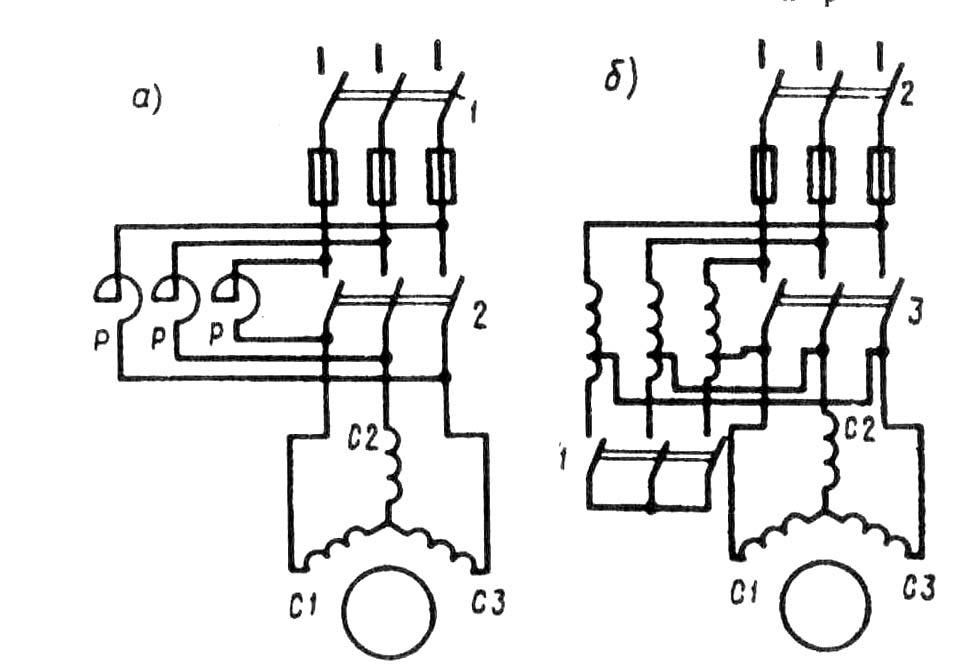
Рис. 15.5. Схемы реакторного (а) и автотрансформаторного (б) способов пуска асинхронных двигателей с короткозамкнутым ротором
раз сопровождается уменьшением пускового момента Мп в (U/1/ U1ном)2 раз.
При пуске двигателя через понижающий автотрансформатор (рис. 15.5, б) вначале замыкают рубильник 1, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник 2 и двигатель оказывается подключенным на пониженное напряжение U/1 . При этом пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается в КА раз, где КА — коэффициент трансформации автотрансформатора. Что же касается тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается в К2А раз по сравнению с пусковым током при непосредственном включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного в КА раз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляет КАКА = К2А раз. Например, если кратность пускового тока асинхронного двигателя при непосредственном его включении в сеть составляет Iп/I1ном = 6 , а напряжение сети 380 В, то при автотрансформаторном пуске с понижением напряжения до 220 В кратность пускового тока в сети I/п/I1ном = 6/ (380/220)2 = 2 .
После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника 3 на двигатель подается полное напряжение сети. Таким образом, автотрансформаторный пуск проходит тремя ступенями: на первой ступени к двигателю подводится напряжение U1= (0,50÷0,60)U1ном, на второй —U1= (0,70÷0,80)U1номи, наконец, на третьей ступени к двигателю подводится номинальное напряжениеU1ном.
Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента, так как значение последнего прямо пропорционально квадрату напряжения. С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске пусковой ток в питающей сети уменьшается в U/1/ U1ном раз, а при автотрансформаторном — в (U/1/ U1ном)2 раз. Но некоторая сложность пусковой операции и повышенная стоимость пусковой аппаратуры (понижающий автотрансформатор и переключающая аппаратура) несколько ограничивают применение этого способа пуска асинхронных двигателей.
10. Способы пуска трехфазного асинхронного двигателя.
-49-
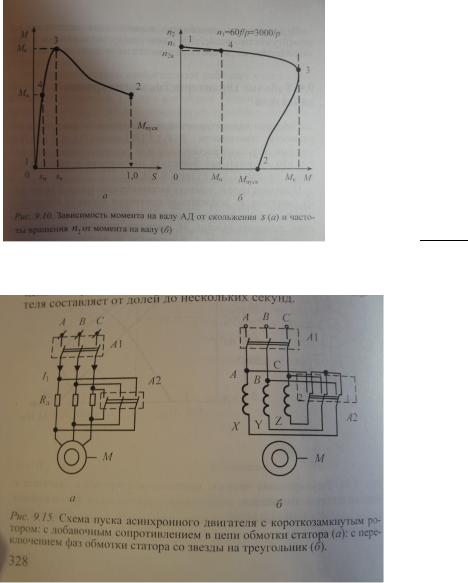
Характерные точки механических характеристик:
1 — режим идеального холостого хода. В этой точке s = 0; n2 = n1; M = 0.
2 — режим короткого замыкания, или начальный этап пуска двигателя. В этой точке s = 1; n2 = 0; M = Mкз = Mпуск.
3 — режим работы с критическим скольжением. В этой точке s = sк; M = Mк.
4 — номинальный режим работы, когда М =
Мн и s=sн=n1−n2н . n1
Пуск АД осуществляется путем подключения фазных обмоток статора к трехфазной сети переменного тока. Применяется прямой пуск, когда напряжение сети практически мгновенно подается на обмотки статора, и пуск, когда напряжение сети подается на обмотки статора ступенчато или плавно с помощью включения в цепь дополнительных элементов. Время пуска составляет от долей до нескольких секунд.
Для прямого пуска двигателя обмотку его статора подключают к трехфазной сети с помощью автомата
А1 при включенном автомате А2.
После включения автомата А1 происходит разгон двигателя с увеличением частоты ротора от нуля до установившейся частоты вращения, при которой момент, развиваемый двигателем, равен моменту сил сопротивления на валу. Пуск возможен, если пусковой момент больше момента сопротивления на валу. В процессе пуска ток статора увеличивается от нуля до максимального значения I1max = (5-7)I1н и затем снижается до установившейся величины, близкой к номинальному значению.
Недостатки прямого пуска: большой пусковой ток и относительно малый пусковой момент.
В маломощных сетях для ограничения пускового тока применяют пуск с активным или индуктивным сопротивлением, включенным в цепь обмотки статора или пуск с переключением обмотки со звезды на треугольник.
Перед пуском двигателя с включенным дополнительным сопротивлением RД автомат А2 устанавливают в выключенное положение, затем включают автомат А1. Происходит пуск двигателя с включенным последовательно с фазной обмоткой сопротивлением RД, поэтому напряжение на фазах обмотки при пуске ниже напряжения сети, и пусковой ток снижается.
-50-
После окончания разбега ротора двигателя включают автомат А2, контакты которого шунтируют добавочные пусковые резисторы RД. Подбором величины RД можно ограничить пусковой ток до любого значения.
Однако в этом случае одновременно уменьшаются пусковой и критический моменты из-за снижения напряжения на обмотках статора, вызванного падением напряжения на сопротивлении. Вместо активного сопротивления можно включить индуктивность.
Пуск двигателя с переключением обмоток статора двигателя со звезды на треугольник возможен, когда обмотка статора может быть соединена звездой и треугольником и напряжение сети соответствует соединению обмотки статора треугольником.
Установив предварительно автомат А2 в положение 1, что соответствует соединению фазных обмоток статора звездой, автоматом А1 подключают обмотку статора к сети. После переходного процесса пуска автомат А2 переводят в положение 2 (треугольник). Напряжение фазы обмотки статора во время пуска меньше номинального в √3 раз. Вследствие этого фазный ток уменьшится в той же степени, а поскольку при соединении треугольником линейный ток больше фазного в √3 раз, пусковой линейный ток при таком способе пуска будет меньше по сравнению с пусковым током прямого пуска в 3 раза. Одновременно в 3 раза уменьшается пусковой и максимальный моменты, т. к. они пропорциональны квадрату фазного напряжения. Значение критического скольжения не изменится, т. к. оно не зависит от напряжения.
Этот способ пуска возможен только при малых моментах сопротивления на валу.
Пуск двигателя с фазным ротором осуществляется прямым подключением обмотки статора к сети с предварительно введенными в цепь ротора добавочными резисторами RД. По мере разгона двигателя резисторы RД выводятся из цепи ротора.
Это позволяет увеличить пусковой момент вплоть до максимального значения, равного критическому, и одновременно снизить пусковой ток.
11. Способы регулирования частоты (скорости) вращения трехфазного асинхронного электродвигателя с короткозамкнутой обмоткой ротора.
Из уравнения частоты вращения МП статора n1= | 60f 1 | вытекают два наиболее | |
p | |||
|
|
распространенных способа регулирования частоты вращения ротора двигателя: изменением числа пар полюсов p; изменением частоты напряжения источника f1, питающего АД.
-51-
Регулирование изменением числа пар полюсов осуществляется изменением схемы соединения фазных обмоток статора. Электродвигатель М подключается к трехфазной сети ABC с помощью автомата А через коммутационное устройство SA. Обмотка каждой фазы состоит из нескольких частей (секций), которые соединяются между собой параллельно или последовательно с помощью устройства SA, образуя разное число пар полюсов двигателя.
Есть и второй способ переключения числа пар полюсов. Статор двигателя имеет две или три независимых обмотки с разным числом пар полюсов p1, p2, p3. С помощью коммутатора SA при работе двигателя к сети подключается только одна обмотка с конкретным числом пар полюсов, которой соответствует конкретная частота вращения МП статора.
Двигатели с регулированием частоты вращения изменением числа пар полюсов называются многоскоростными.
Для регулирования частоты вращения ротора АД изменением частоты напряжения статора необходимо иметь отдельный источник энергии с регулируемой частотой.
Схема включает транзисторный преобразователь частоты UZ, включенный между сетью с промышленной частотой и обмоток статора АД М. Преобразователь частоты UZ преобразует переменное трехфазное напряжение с частотой f = 50 Гц в трехфазное переменное напряжение с регулируемыми частотой fрег и напряжением Uрег. Частота fрег может плавно изменяться от нуля до 90 Гц с помощью сигнала uy. Такой способ регулирования частоты АД позволяет получить при всех частотах постоянный
критический момент Мк, широкий диапазон и плавное регулирование частоты вращения, однако стоимость преобразователя частоты достаточно велика.
Существуют и другие способы регулирования частоты вращения, например, изменением напряжение на обмотке статора с помощью тиристорного регулятора напряжения, применяемый для плавного пуска АД.
-52-
12. Способы регулирования частоты (скорости) вращения трехфазного асинхронного электродвигателя с фазным ротором (с контактными
кольцами).
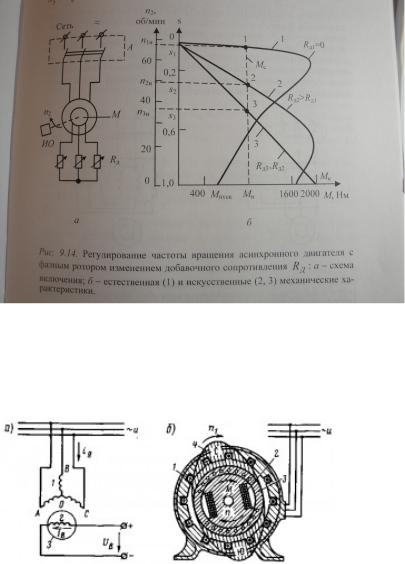
Регулирование частоты вращения ротора АД с фазным ротором в большинстве случаев осуществляется путем введения в цепь обмотки ротора дополнительного сопротивления RД.
С введением RД критическое скольжение двигателя равно
s | = | R2′ +R’Д | . | ||
|
|
| |||
к |
| √xк2+R12 | |||
|
|
|
|
| Добавочное сопротивление |
|
|
|
|
| в цепи обмотки ротора |
|
|
|
|
| увеличивает критическое |
|
|
|
|
| скольжение и не влияет на |
|
|
|
|
| значение максимального момента |
|
|
|
|
| Мк. |
|
|
|
|
| На рисунке естественная (1) |
|
|
|
|
| и искусственные (2) и (3) |
|
|
|
|
| механические характеристики |
|
|
|
|
| для различных значений |
|
|
|
|
| добавочного сопротивления. |
|
|
|
|
| К недостаткам данного |
|
|
|
|
| способа регулирования частоты |
|
|
|
|
| вращения ротора относятся: |
|
|
|
|
| значительные потери энергии в |
|
|
|
|
| регулировочном добавочном |
сопротивлении; малая жесткость механических характеристик, из-за чего небольшое | |||||
изменение момента на валу вызывает значительное изменение частоты вращения; дискретное регулирование частоты вращения.
13. Устройство и принцип действия синхронного генератора и его применение в промышленности.
Его обмотки якоря I (рис. 1, а) соединены звездой и подключены к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает
электромагнитный момент М (рис. 1,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе, в отличие от асинхронного, ротор будет разгоняться до частоты вращения n1, с которой вращается магнитное поле (до синхронной частоты вращения).
Объясняется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.