


Вентильный двигатель — Википедия
 Рис. 1. Принцип работы трёхфазного вентильного двигателя
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесконтактным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2]
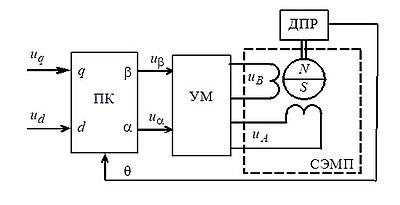
СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока uq{\displaystyle u_{q}}, действие которого аналогично напряжению якоря двигателя постоянного тока, и ud{\displaystyle u_{d}}, аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы ud,uq{\displaystyle u_{d},u_{q}}, представляют собой проекции вектора напряжения управления Uy→={ud,uq}{\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат {d,q}{\displaystyle \{d,q\}}, связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций ud,uq{\displaystyle u_{d},u_{q}} в проекции uα,uβ{\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат {α,β}{\displaystyle \{\alpha ,\beta \}}, связанной со статором.
Как правило, в системах управления электропривода задаётся ud=0{\displaystyle u_{d}=0}[3], при этом уравнения преобразования координат принимают вид[4]:
uα=−uq⋅sinθ,{\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
uβ={\displaystyle u_{\beta }=} uq⋅cosθ,{\displaystyle u_{q}\cdot \cos {\theta },}
где θ{\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α{\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ{\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, uq{\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала uq{\displaystyle u_{q}}, формирует гармонические сигналы uα,uβ{\displaystyle u_{\alpha },u_{\beta }}, которые усилитель мощности (УМ) преобразует в фазные напряжения uA,uB{\displaystyle u_{A},u_{B}}. Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Достоинства и недостатки
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструкция
Конструктивно современные вентильные привода состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Применение
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
См. также
Ссылки
Литература
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
Примечания
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Погружной вентильный двигатель (ВЭД) — Добыча нефти и газа
Конструктивно, вентильный Разрез ротора ВЭД двигатель не отличается от асинхронного двигателя за исключением устройства ротора. Отличие конструкции пакетов ротора состоит в том, что они собраны на втулках, выполненных из бесшовных труб, на которых склеиваются и опрессовываются пластины из электротехнической стали. В пазы пакетов вставляются постоянные магниты. При этом количество полюсов составляет от двух до пяти пар с чередованием северного и южного полюсов.
 Еще одной конструктивной особенностью вентильного двигателя является наличие датчика положения ротора (ДПР), который необходим для управления подключения тех фаз электродвигателя, которые создают максимальный момент с полюсами ротора.
Еще одной конструктивной особенностью вентильного двигателя является наличие датчика положения ротора (ДПР), который необходим для управления подключения тех фаз электродвигателя, которые создают максимальный момент с полюсами ротора.
Принцип работы вентильного двигателя основан на том, что микроконтроллер, расположенный в станции управления, питает обмотки статора по определенному алгоритму так, чтобы магнитное поле статора всегда было сдвинуто относительно магнитного поля ротора. В результате взаимодействия магнитных полей создается вращающий момент, который стремится развернуть ротор так, чтобы магнитные поля статора и ротора совпали. Но при повороте ротора под действием ДПР происходит переключение обмоток, и магнитное поле статора поворачивается на следующий шаг. Таким образом, чем быстрее происходит переключение обмоток статора, тем быстрее вращается ротор.
Преимущества вентильных электродвигателей перед асинхронными двигателями заключаются в следующем. При одинаковой мощности вентильные двигатели обладают меньшими массогабаритными показателями, пониженным тепловыделением и энергопотреблением (последнее снижается до 30%), а также повышенным значением КПД, коэффициента мощности, электромагнитного момента. Имеется возможность регулирования частоты вращения (250-2000, 500-3500 об/мин) и автоматического сохранения мощности на валу при различных режимах работы насоса. Благодаря регулируемому приводу осуществляется плавный запуск установки, компенсация неточностей подбора оборудования, а также оптимизация работы системы «насос-пласт» в случае изменений параметров пласта.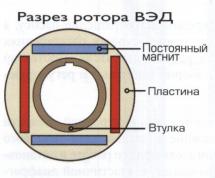
К недостаткам вентильных двигателей следует отнести высокую стоимость станции управления и самого электродвигателя, обусловленную сложной системой управления и использованием дорогостоящих постоянных магнитов в конструкции ротора.
Похожие статьи:
РЭНГМ → Центробежный насос (ЭЦН)
РЭНГМ → Погружной насос для скважины
Статьи и новости нефтяной промышленности → Роль нефти и газа в жизни человека.
РЭНГМ → Погружной электродвигатель (ПЭД)
Вентильные электродвигатели. Некоторые геометрические и количественные соотношения, относящиеся к ВДПТ. Схемы обмоток и структур ВДПТ
Лекция 1
Введение
Электрические машины – один из наиболее распространенных типов преобразователей энергии, поэтому их совершенствование является важнейшей задачей современной науки и техники.
Одним из рациональных путей расширения функциональных возможностей, повышения надежности и улучшения характеристик электрических машин является замена контактной коммутации, выполняемой щеточно-коллекторным узлом, на бесконтактную коммутацию, выполняемую полупроводниковыми приборами силовой электроники.
Отличительной чертой вентильных электродвигателей ВД является объединение в единой структуре электромеханического преобразователя энергии, собственно электрической машины, и управляемого полупроводникового коммутатора (преобразователя частоты). Такое объединение обеспечивает бесконтактность при преобразовании энергии и тем самым, позволяет применять ВД в тяжелых эксплуатационных условиях:
— глубокого вакуума;
— пониженной и повышенной температуры;
— высокой влажности;
— агрессивных сред, когда требуется обеспечить низкий уровень электромагнитных помех.
Из большого количества бесконтактных электрических машин [1] в курсе лекций рассматриваются электрические машины, охваченные классификацией приведенной на рис. 1, которая включает в себя вентильные электродвигатели, содержащие инверторы, выполненные на полупроводниковых приборах.

Рис. 1 Классификация вентильных электродвигателей
Вентильные электродвигатели в классификации охватывают такие двигатели, которые содержат источник постоянного тока или другими словами имеют звено постоянного тока.
Источниками постоянного тока могут быть:
— аккумуляторные батареи,
— генераторы постоянного тока,
— выпрямительные устройства.
Особенностью ВД, источником питания которых служат выпрямительные устройства, является то, что эти устройства как правило входят в состав ВД.
1.1 Краткая история развития вентильных электродвигателей
Первую схему вентильного двигателя предложил в 1933 году Керн в качестве тягового электродвигателя электропровода. В России в 1934-1935 годах Д.А. Заволишин и О.Г. Вегнер, а затем Ф.И. Бутаев и Е.Л. Эттингер предложили и исследовали наиболее рациональные схемы вентильных преобразователей, дали методики расчета и рассчитали тяговые электродвигатели.
Практическое применение ВД задержалось вследствие отсутствия вентильных коммутирующих устройств, удовлетворяющих требованиям по массогабаритным показателям и условиям работы.
Разработка полупроводниковых управляемых приборов позволила заменить ионные коммутаторы полупроводниковыми, что открыло новые возможности развития вентильных электродвигателей.
Спустя год после изобретения транзистора в 1949 году был предложен бесконтактный двигатель постоянного тока с коммутирующим устройством на полупроводниках, управляемых индуктивными датчиками положения ротора.
Освоение космического пространства послужило мощным толчком в развитии вентильных электродвигателей постоянного тока. Примером может служить создание электроприводов на базе ВД для перемещения лунохода по поверхности Луны.
Применение вентильных электродвигателей в самолетостроении началось лишь в восьмидесятых годах прошлого столетия на таких самолетах как ИЛ-96, ТУ-204, МИГ-31.
В ОАО «Электропривод» г. Киров исследованием и разработкой вентильных электродвигателей постоянного тока начали заниматься в шестидесятых годах двадцатого столетия, а в восьмидесятые годы были освоены в серийном производстве вентильные электродвигатели, которым на современные самолеты: электродвигатель ДБ-32-25-12 с коммутатором КВД-25МВ.
Лекция 2
1.2. Вентильные электродвигатели постоянного тока (ВДПТ)
1.2.1. Функциональная схема и принцип действия ВДПТ
По ГОСТ 27471-87 «Машины электрические вращающиеся. Термины и определения» вентильный электродвигатель постоянного тока – это электрическая машина постоянного тока, вентильное коммутирующее устройство которое представляет собой инвертор, управляющий либо по положению ротора, либо по положению магнитного поля.
Другими словами, можно сказать синхронный двигатель, питающийся от сети постоянного тока через полупроводниковый коммутатор, управляемый в функции углового положения ротора называется вентильным двигателем постоянного тока.
Инвертор – устройство преобразующее постоянный ток в переменный ток. Принцип действия ВДПТ можно представить на примере электродвигателя с двухполупериодным инвертором (преобразователем частоты) и синхронной машиной с постоянными магнитами, имеющий 3-х фазную якорную обмотку, как наиболее распространенный, так как наряду с умеренной сложностью имеет широкие функциональные возможности в части реализации регулировочных характеристик и высоких показателей по КПД, удельной энергоотдаче на единицу массы.
Функциональная схема ВДПТ представлена на рис. 1.2.1.

Рис. 1.2.1 Функциональная схема ВДПТ
Электромеханическая часть ВДПТ представляет собой синхронную машину СМ с постоянными магнитами на роторе. В отличие от двигателя постоянного тока число секций в синхронной машине равно числу фаз. Электропитание от источника напряжения постоянного тока подается на инвертор напряжения (или преобразователь частоты ПЧ).
Инвертор преобразует постоянное напряжение в переменное напряжение, частота и фаза которого определяется датчиком положения ротора ДПР. Переменное напряжение подается на обмотку синхронной машины, которая работает в двигательном режиме, когда ось потока статора опережает ось потока ротора на угол q, как это показано на рис. 1.2.2 и электродвигатель создает движущий вращающий момент. В коллекторной машине постоянного тока ось результирующего потока секций якорной обмотки отстает от оси потока возбуждения электродвигателя. Механические характеристики ВДПТ напоминают характеристики двигателя постоянного тока с независимым возбуждением, поэтому их также называют бесконтактными, бесколлекторными или бесщеточными двигателями постоянного тока. Отличие ВДПТ от коллекторного электродвигателя постоянного тока состоит в том, что у коллекторной машины поле обмотки возбуждения и поле обмотки якоря неподвижны в пространстве, а у ВДПТ поле якорной обмотки вращается синхронно с полем возбуждения ротора.
Уместно заметить, что в качестве источника постоянного тока могут быть использованы аккумуляторные батареи, генераторы постоянного тока или выпрямительные устройства, как правило, содержащие сглаживающий фильтр. В любой схеме ВДПТ датчик положения ротора ДПР обеспечивает жесткую позиционную обратную связь. Электропитание управляющего работой инвертора устройства и схемы ДПР может выполняться от того же самого источника, к которому подключаются фазы обмотки якоря (если уровень напряжения этого источника соответствует требуемому), либо напряжение источника понижают и стабилизируют, либо используют отдельный источник, когда это целесообразно.
На рис. 1.2.2 представлена упрощенная схема трехфазного ВДПТ с двухполупериодным инвертором (преобразователем частоты), также называемыми трехфазными ВДПТ с двухполярной коммутацией. Этот тип ВДПТ является самым распространенным из всех видов [3] ВДПТ.
Рис. 1.2.2 Упрощенная схема трехфазного ВДПТ с двухполупериодной
коммутацией
вентильный электродвигатель — патент РФ 2098908
Область использования: высокоскоростной вентильный электропривод. Сущность изобретения: двигатель содержит дисковый ротор с постоянными магнитами трапецеидальной формы, замкнутыми магнитопроводом, в корпусе двигателя коаксиально ротору установлен статор, состоящий из статорных катушек трапецеидального вида с радиально расположенными активными участками проводников, датчики положения ротора, расположенные со стороны магнитопровода, для обеспечения трапецеидальной формы зависимости момента на валу двигателя от ушла поворота ротора подобраны форма и геометрические соотношения размеров постоянных магнитов и статорных катушек. Магниты трапецеидальной формы имеют на одном или обоих основаниях вогнутый участок, средняя линия трапеции перпендикулярна радиусу диска и составляет 0,7oC0,9 длины полюсного деления, ширина активных участков проводников составляет 0,2oC0,4 длины полюсного деления, а угол, образованный радиусами, проходящими через серединку активных пучков проводников каждой из катушек, равен 360/n, где n — количество магнитов, ротор выполнен трехдисковым, а статор состоит из двух статорных обмоток, каждая из которых расположена между наружным и внутренним дисками, в наружных дисках ротора, в верхней и нижней частях корпуса двигателя и на его боковой поверхности имеются вентиляционные отверстия. Технический результат: повышение КПД двигателя, удельной мощности, облегчение теплового режима, повышение надежности и упрощении конструкции двигателя. 12 ил.Рисунки к патенту РФ 2098908
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6, Рисунок 7, Рисунок 8, Рисунок 9, Рисунок 10, Рисунок 11, Рисунок 12 Изобретение относится к электротехнике, а именно к бесконтактным электрическим машинам постоянного тока дискового типа, и может быть использовано преимущественно при создании высокоскоростных вентильных электродвигателей большой мощности, применяемых в качестве приводных электродвигателей кухонных комбайнов, пылесосов, тяговых двигателей электрического транспорта, а также в качестве электроприводов насосов, высокоскоростных центрифуг, гироскопов. Вентильные двигатели являются весьма перспективным классом электрических машин, бурно развивающимся в настоящее время и приобретающим все больше распространение в различных областях техники. Эти двигатели имеют ряд существенных преимуществ по сравнению с коллекторными двигателями, а именно они более надежны в работе ввиду отсутствия у них щеточноколлекторного узла, являющегося самым ненадежным узлом в коллекторных двигателях; у них высокие электромеханические и энергетические показатели, удельная мощность и удельный момент, а, кроме того, вентильные двигатели позволяют в широких пределах регулировать скорость вращения ротора. Область применения вентильных двигателей охватывает широкий круг приборов: от приборов бытовой техники с мощностью в единицы ватт до двигателей электромобилей с мощностью в десятки киловатт. Однако в ряде областей техники, где требуются высокоскоростные двигатели, применение вентильных двигателей ограничено тем, что с увеличением скорости вращения возрастают потери в стали статора, что в свою очередь приводит к уменьшению КПД электрической машины, увеличению ее нагрева и как следствие этого к снижению отбираемой мощности. Отказ от применения электротехнической стали в статоре вентильного двигателя является весьма привлекательным направлением, однако в этом случае затрудняется отвод тепла от обмоток статора, происходит его перегрев, возрастают потери в меди и возникает новая проблема отвод тепла от обмоток статора. Актуальной задачей, решаемой при конструировании вентильных двигателей, является также повышение надежности его работы, при этом одним из элементов, определяющих устойчивую работу двигателя, являются датчик положения ротора ДПР, его конструкция и расположение. Попытки решить поставленные задачи в той или иной степени встречаются в ряде зарубежных и отечественных патентов [1][2][3] Изобретение позволяет решить поставленные задачи. Известен вентильный электродвигатель дискового типа [1] с ротором в виде кольцевого, многополюсного постоянного магнита, намагниченного в аксиальном направлении. Постоянный магнит расположен на несущей пластине и магнитно замкнут кольцевым магнитопроводом. Статор, состоящий из плоских обмоток, имеющих между собой электрическое смещение на 90o, расположен соосно с постоянными магнитами ротора на несущем каркасе. Вращающееся поле обмотки статора, не имеющего железа, взаимодействует с полем полюсов постоянного магнита ротора, при этом датчики положения ротора, выполненные в виде преобразователей Холла и служащие для управления поочередным подключением катушек к цепи постоянного тока, расположены на том же несущем каркасе, что и обмотки статора. Недостатком конструкции такого двигателя является плохой отвод тепла от катушек статора, т. к. в двигателе не организована система вентиляции. Это приводит к перегреву катушек, снижению КПД двигателя и не позволяет отбирать высокую мощность с вала двигателя, что особенно сказывается в диапазоне средних и больших мощностей (более 100 Вт). Кроме того, использование в качестве ротора одного кольцевого магнита не позволяет применять его в высокоскоростных двигателях, т.к. механическая прочность постоянных магнитов недостаточна для работы на высоких скоростях. К числу недостатков двигателя следует также отнести то обстоятельство, что датчик Холла расположен непосредственно на статоре, т.к. в этом случае магнитное поле катушек может оказывать влияние на датчик Холла, вызывая в нем нежелательные наводки. Это усложняет электрическую схему датчика и делает двигатель менее надежным. Известна также конструкция вентильного двигателя [2] состоящего из многополюсного ротора, снабженного множеством биполярных магнитов с большой коэрцитивной силой, расположенных друг против друга. В плоскости, перпендикулярной оси ротора, на пластине из изоляционного материала, жестко соединенной с корпусом двигателя, располагаются плоские статорные катушки. Активные участки проводников статорных катушек направлены радиально. В одном из вариантов представлен двигатель, у которого ротор состоит из двух параллельных дисков, несущих круговой ряд биполярных магнитов. Между параллельными дисками ротора располагается плоская статорная обмотка. Использование В данном двигателе отдельных постоянных магнитов, укрепленных в диске, а не единого многополюсного магнитного кольца, как в двигателе [1] позволяет создать более высокоскоростной двигатель, однако проблема отвода тепла от обмоток статора не решена и в этом двигателе [2] Кроме того, и в том, и в другом двигателях соотношение между шириной магнита и шириной активного пучка катушки, расположенного по радиусу диска ротора, если судить по чертежам и описанию, выбраны не оптимально с точки зрения получения максимального КПД и максимальной удельной мощности. Наиболее близким решением, выбранным в качестве прототипа, является бесщеточная электрическая машина постоянного тока дискового типа [3] содержащая коаксиально расположенные относительно друг друга статор и ротор, при этом на роторе расположены постоянные магниты, а на статоре обмотка якоря, активная поверхность которой обращена к активной поверхности полюсов постоянных магнитов, имеющих одинаковую полярность. Обмотка якоря выполнена в виде отдельных катушек, образующих группы катушек, расположенных в магнитном поле постоянных магнитов с угловым смещением друг относительно друга. Имеется переключающее устройство, предназначенное для поочередного подключения группы катушек обмотки якоря к цепи постоянного тока, а, кроме того, каждая катушка или каждый постоянный магнит выполнен с возможностью изменения силы магнитного взаимодействия между постоянным магнитом и током в катушке в окружном направлении. Один из вариантов двигателя, выбранного в качестве прототипа, содержит статор, выполненный с двумя активными поверхностями, напротив которых установлен свой роторный диск. Второй роторный диск представляет собой зеркальное отражение первого. На каждом диске расположены постоянные магниты. Полярность магнитов роторного диска, расположенного с одной стороны статора, противоположна полярности диска, расположенного с другой стороны статора. Такая конструкция двигателя повышает его удельные массогабаритные показатели, однако в ней нерационально использованы магниты и активные пучки проводников катушек статора, так как магнит во время движения перекрывает участок катушки, создающий момент, направленный против движения. Вопросы вентиляции также не решены в данной конструкции двигателя. К числу недостатков прототипа следует также отнести то обстоятельство, что ДПР, хотя и вынесен из поля катушек статора, что сделало работу датчика более устойчивой, имеет в качестве модулятора магнитного потока самостоятельный магнит, а в качестве сигнальных элементов выступы, расположенные на отдельном диске. Это усложняет конструкцию двигателя и приводит к дополнительным потерям его мощности. Задачей изобретения является повышение КПД двигателя, его удельной мощности, а также облегчение теплового режима двигателя и повышение его надежности при одновременном упрощении конструкции. Поставленная задача достигается тем, что предлагается вентильный двигатель, который содержит расположенный в корпусе с возможностью вращения дисковый ротор с постоянными магнитами. Магниты имеют трапецеидальную форму и замыкаются магнипроводом. В корпусе электродвигателя коасиально относительно ротора установлен статор, который состоит из статорных катушек трапецеидального вида, расположенных в магнитном поле постоянных магнитов. Активные участки проводников статорных катушек расположены радиально. Двигатель содержит также датчик положения ротора, который расположен напротив постоянных магнитов со стороны магнитопровода. От прототипа предлагаемый двигатель отличается тем, что ширина активных участков проводников статорных катушек равна 0,2oC0,4 длины полюсного деления, а угол, образованный радиусом, проходящими через середину активных участков проводников каждой из катушек, равен 360/n, где n количество магнитов. Кроме того, одно или оба основания каждого из постоянных магнитов трапецеидальной формы имеют вогнутый участок, а средняя линия трапеции перпендикулярна радиусу диска и составляет 0,7-0,9 длины полюсного деления. Ротор электродвигателя состоит из трех параллельных дисков, а статор из двух статорных обмоток. Каждая статорная обмотка расположена между наружным и внутренним дисками, причем наружные диски ротора, верхняя и нижняя части корпуса электродвигателя снабжены отверстиями для входа холодного воздуха. Эти отверстия расположены друг против друга, причем входные отверстия на наружных дисках находятся между осью ротора и постоянными магнитами. На боковой поверхности корпуса имеются выходные отверстия, расположенные напротив воздушных зазоров, образуемых дисками ротора и статорными обмотками. Входные отверстия в наружных дисках в предпочтительном варианте могут быть выполнены наклонными в направлении вращения диска и от центра диска к периферии. Выходные отверстия на боковой поверхности корпуса двигателя также предпочтительно выполнять наклоненными в направлении вращения ротора. Для двигателей с невысокими скоростями вращения наружные диски ротора снабжаются лопатками, обращенными в сторону внутреннего диска и расположенными между осью ротора и магнитами. Лопатки наклонены таким образом, что ни одна из сторон каждой из лопаток не проходит через центр диска. По крайней мере на одном из магнитопроводов имеются окна, расположенные по окружности в зоне постоянных магнитов. Напротив окон находятся датчики положения ротора. Расстояние между боковыми кромками окон определяется из соотношенияZ (0,8oC1,2)WQ/180,
где W длина хорды дуги окружности, проходящей через центры двух соседних окон;
Q угол коммутации. На фиг.1 представлен осевой разрез электродвигателя; на фиг.2 вид снизу верхней части корпуса двигателя с вентиляционными отверстиями и датчиками Холла; на фиг. 3 изображен наружный роторный диск с магнитами, вентиляционными отверстиями и лопатками; на фиг.4 статорное кольцо с катушками; на фиг. 5 кольцевой магнитопроводов с окнами; на фиг.6,7 участки статорного кольца с катушками и с изображением магнитов роторного диска для различных положений магнитов роторного диска относительно статора; на фиг.8,9 представлена схема расположения датчиков Холла относительно окон магнитопровода; на фиг.10 12 представлены графики и временные диаграммы для обоснования соотношений геометрических размеров катушек и магнитов, предлагаемых изобретением. Сущность изобретения иллюстрируется графиками и временными диаграммами, представленными на фиг. 10 12, и заключается в следующем. Для повышения КПД двигателя выгодно иметь трапецеидальную форму зависимости момента (M) на валу двигателя от угла () поворота при постоянном токе, протекающем через обмотку фазы статора (см. фиг. 10а). Для двухфазного двигателя участки плоской вершины трапеции ab и cd выбирают не менее 90o, а ток в обмотке включается преимущественно на участке ab одной полярностью, а на участке cd другой полярностью. Высокий КПД достигается в этом случае благодаря тому, что электрический ток протекает только в течение того времени, когда сила взаимодействия обмоток статора и магнитов ротора максимальна. Обмотки второй фазы сдвинуты относительно обмоток первой фазы на 90o периода коммутации (половина полюсного деления) и процесс включения тока протекает со сдвигом на 90o аналогично первой фазы (фиг.10б). В связи с тем, что момент на валу ротора равен сумме моментов обеих фаз, а эти моменты в пределах включенного состояния практически постоянны, то и суммарные моменты практически постоянны. На фиг.10б M1 (v), I 1(v) момент и ток первой фазы; M2 (v), I 2 (v) момент и ток второй фазы; M (v) суммарный момент на валу двигателя. Требования к постоянству зависимости момента на участке ab и cd (фиг.10а) весьма важны, так как от их выполнения зависит величина КПД и равномерность вращения двигателя. Для получения трапецеидальной формы зависимости момента на валу от угла поворота ротора необходимо иметь определенные соотношения между шириной активных пучков проводников катушки и шириной магнита. Сила взаимодействия магнита с катушкой определяется следующим известным выражением [4]
F = BIlcos (1)
где B вариант индукции в зоне взаимодействия катушки с магнитом;
I величина тока в катушке;
l длина проводников, находящихся в поле магнита;
угол между магнитной индукции и направлением тока. Поскольку в предлагаемом двигателе угол между направлением тока и вектором магнитной индукции равен 90o, а толщина катушки постоянна, то выражение (1) для силы взаимодействия магнитов с катушкой приобретает следующий вид:
F BIS,
где S площадь катушки, взаимодействующей с магнитом. Для того, чтобы F была постоянной при неизменном токе I, необходимо иметь постоянную площадь S проводников катушки, находящихся в магнитном поле при повороте магнита на 90o периода коммутации, так как индукция в зазоре между магнитами предполагается постоянной. Следовательно, ширина магнита может быть либо больше, либо меньше активной части катушки. При выборе магнита, ширина которого меньше активной части катушки, КПД двигателя получается ниже, чем при выборе магнита, имеющего ширину, большую активной части катушки, так как при узком магните (фиг.11б) отношение площади активной зоны, определяющей силу взаимодействия, к общей площади катушки меньше, чем в случае широкого магнита (фиг.11а). Поэтому в предлагаемом двигателе используется магнит, ширина которого больше ширины активных пучков проводников катушки. Однако ширина магнита должна быть меньше величины полюсного деления на величину перемычки, от которой нельзя отказаться из соображений прочности диска ротора при высоких скоростях. Ширина этой перемычки может составлять 0,1oC0,3 полюсного деления, следовательно, ширина магнита составит 0,9oC0,7 ширины полюсного деления. Для получения участков ab, cd (фиг.10а) трапеции, равных 90o периода коммутации (половина полюсного деления), разница между шириной активных пучков катушки и шириной магнита должна составлять 0,5 полюсного деления, следовательно, ширина h (фиг.12а) активных пучков проводников катушки должна составлять 0,4-0,2 полюсного деления. Однако на практике в реальных конструкциях дисковых вентильных электродвигателей [1] и [2] получение такого участка с постоянной зависимостью затруднено, так как обычно используемые для этого магниты трапецеидальной формы (фиг.12а) и катушки, имеющие пучки проводников, параллельных радиусу, имеют недостаточно протяженные участки ab и cd (график зависимости M (v) фиг.12а) с постоянным моментом, что вызвано влиянием краевых эффектов магнитной системы и уменьшением ширины магнита от периферии к центру. Для увеличения протяженности этого участка обычно приходится сокращать ширину стороны катушки, однако это приводит к уменьшению мощности двигателя, а значит и к снижению КПД. Отличительной особенностью предлагаемого двигателя является увеличение протяженности участка с постоянным моментом путем выбора формы магнита. На одном или обоих основаниях трапецеидального магнита выполняется вогнутый участок (фиг. 12б), для которого на этой же фигуре приведена зависимость момента (M) на валу двигателя от угла (v) поворота ротора. Таким образом, путем подбора формы и герметических соотношений размеров постоянных магнитов и статорных катушек удается добиться желаемой протяженностью участка постоянства момента на валу двигателя без уменьшения ширины стороны катушки. В большинстве случаев, когда в двигателе для управления датчиком Холла применяют силовые магниты, их протяженность выбирают такой, чтобы она соответствовала углу коммутации. В предлагаемом двигателе протяженность магнитов составляет 0,7oC0,9 полюсного деления, а угол коммутации выбран 90o (половина полюсного деления). Поэтому использовать силовые магниты напрямую для управления датчиком Холла не представляется возможным. Найдено следующее решение этой проблемы. В кольцевом магнитопроводе выполнены окна, расположенные над силовыми магнитами. Часть магнитного потока выходит через эти окна за пределы магнитопровода и заставляет срабатывать датчик Холла. Причем эта часть магнитного потока, выходящая из окон, незначительна по сравнению с общей индукцией магнита и не приводит к какому-либо существенному снижению мощности двигателя. В общем случае расстояние между боковыми кромками окон в магнитопроводе определяется из формулы
Z (0,8oC1,2)WQ/180,
где W длина хорды дуги окружности, проходящей через центры двух соседних окон,
Q угол коммутации. Это соотношение выбрано из следующих соображений: у разных двигателей в зависимости от мощности и оборотов меняются параметры катушек (размеры, индуктивность). Поэтому, когда рассчитывается расстояние между боковыми кромками окон, нужно учитывать время нарастания тока в катушках статора, которое зависит от индуктивности катушек статора. В этом случае угол коммутации Q может меняться в зависимости от параметров конкретного двигателя. Длина хорды W соответствует 180o периода коммутации, поэтому W/180 выражает 1o периода коммутации в линейных единицах, следовательно WQ/180 будет соответствовать выбранному углу коммутации Q, выраженному в линейных единицах. Коэффициент (0,8oC1,2) выбран потому, что магниты, применяемые в двигателях, могут иметь разные свойства (индукция на поверхности, уменьшение индуктивности с увеличением расстояния от магнита) и значит будет меняться магнитный поток, выходящий из окон в магнитопроводе. Тогда расстояние между боковыми кромками окон корректируется в зависимости от конкретных параметров магнитов. Для решения поставленной в изобретение задачи улучшения отвода тепла от катушек статора предлагается использование трехдискового двигателя, в котором охлаждаются обе стороны каждой из катушек статора. Движение воздуха в направлении от центра двигателя к периферии в основном осуществляется за счет сил молекулярного трения воздуха о диски. Для организации направленного забора холодного воздуха и выброса горячего воздуха в наружных дисках ротора имеются отверстия, расположенные между осью ротора и постоянными магнитами. Для облегчения движения воздуха эти отверстия наклонены в направлении вращения и от центра диска к периферии. Для выхода нагретого воздуха корпус двигателя снабжен отверстиями, расположенными на его боковой поверхности и напротив воздушных зазоров, образуемых дисками ротора и статорными обмотками. На верхней и нижней частях корпуса двигателя имеются отверстия для входа холодного воздуха, расположенные напротив отверстий в дисках ротора. Такая система вентиляции позволяет в 5 10 раз улучшить отвод тепла при средних скоростях вращения ротора в двигателе (от 3-х до 10-ти тысяч оборотов в 1 мин) и в 10 15 раз при высоких скоростях вращения, что позволяет в 2 3 раза увеличить мощность электродвигателя по сравнению с известными аналогами и прототипом. Эффективность такой системы вентиляции при низких скоростях вращения падает ввиду того, что силы молекулярного трения воздуха о поверхность диска становятся недостаточными. Для уменьшения этого эффекта наружные диски снабжены лопатками, обращенными в сторону внутреннего диска. Расположены лопатки между осью ротора и магнитами. Для уменьшения сопротивления выходу нагретого воздуха из полости двигателя выходные отверстия на боковой поверхности корпуса наклонены в сторону вращения двигателя. Предлагаемый вентильный электродвигатель содержит разъемный корпус, состоящий из трех частей верхней 1, средней 2 и нижней 3. Ротор электродвигателя, состоящий из трех дисков 4, 5 и 6, жестко закреплен на валу 7, установленном в подшипниках 8, закрепленных в верхней 1 и нижней 3 частях корпуса. Каждый из дисков 4, 5 и 6 содержит двенадцать постоянных магнитов 9 (фиг.2) с чередующейся полярностью, намагниченных в аксиальном направлении. Каждый наружный диск 4 и 6 снабжен кольцевым магнитопроводом 10 и 11, причем магнитопровод 10 имеет окна 12 (фиг.5). Двухфазный статор электродвигателя состоит из двух статорных колец 13, 14 с катушками 15, 16. Статорные кольца 13, 14 жестко укреплены в корпусе и установлены таким образом, что статорное кольцо 13 располагается между наружным диском 4 и внутренним диском 5, а статорное кольцо 14 располагается соответственно между наружным диском 6 и внутренним диском 5, образуя соответствующие воздушные зазоры. Катушки 15 одной фазы расположены на кольце 13, а катушки 16 второй фазы на кольце 14. Количество катушек на каждом из статорных колец 13, 14 в два раза меньше числа магнитов, содержащихся на одном диске. Катушки 15 и 16 смещены между собой в плоскости вращения ротора на угол, равный 360/2n, где n число постоянных магнитов (в рассматриваемом варианте используется двенадцать магнитов). Датчики положения ротора 17, 18 (фиг.4), в качестве которых использованы датчики Холла, расположены на верхней 1 части корпуса двигателя напротив окон 12 магнитопровода 10, причем каждый из датчиков 17, 18 через коммутатор (не показан) управляет своей фазой двигателя. Число окон 12 равняется числу постоянных магнитов 9, а расстояние между боковыми кромками окон определяется из математического выражения (1). На торцах верхней 1 и нижней 3 частей корпуса двигателя вблизи оси вращения расположены отверстия 19 для входа холодного воздуха в полость двигателя. Напротив отверстий 19 на наружных дисках 4 и 6 между валом 7 и магнитами 9 для дальнейшего движения холодного воздуха имеются наклоненные в направлении вращения двигателя отверстия 20, которые наклонены также от центра диска к его периферии. На боковых поверхностях верхней 1, средней 2 и нижней 3 частей корпуса расположены выходные отверстия 21 (фиг.4), наклоненные в направлении вращения двигателя. На наружных дисках 4 и 6 имеются лопатки 22 (фиг.2), обращенные в сторону диска 5, расположенные между валом 7 и магнитами 9. Принцип действия электродвигателя можно пояснить при помощи фиг.6 9. Двигатель является двухфазным и работает следующим образом. Датчик положения 17 управляет работой первой фазы, располагается так, что он включает ток через катушки фазы, когда край магнита 9 по средней линии совпадает с краем активной части проводников катушки 15 (фиг.6), а край окна 12 магнитопровода 10 находится в этот момент напротив датчика 17 (фиг.8), что достигается выбором взаимного положения окна 12 относительно магнитов 9 и датчика положения 17 относительно катушек 15. Активные пучки проводников с током начинают взаимодействовать с постоянным полем магнитов 9 и появляется момент сил, направленный в сторону вращения ротора. Когда другой край того же магнита 9 совпадает с другим краем той же активной части проводников 15 (фиг.7), датчик положения 17 выключает ток через катушки 15. В это время напротив датчика положения 17 находится второй край того же окна 12 магнитопровода 10 (фиг. 9). Когда на место магнита 9 одной полярности (например N) приходит магнит 9 противоположной полярности (например S), датчик положения 17 включит через катушки 15 ток противоположной полярности. Таким образом сохраняется момент сил, направленный в ту же сторону. В это время напротив датчика положения 17 находится край окна 12, расположенного над магнитом 9 противоположной полярности. Все катушки 15 фазы соединены последовательно или последовательно-параллельно, или параллельно и работают одновременно, поэтому суммарный момент сил, создаваемый фазой, равен сумме моментов сил всех катушек 15. Катушки 16 второй фазы смещены относительно катушек 15 первой фазы на 90 электрических градусов. Работой второй фазы управляет второй датчик положения 18, который смещен относительно первого датчика положения 17 на 90 электрических градусов. В остальном работа второй фазы совпадает с работой первой фазы. Работа системы вентиляции происходит следующим образом. На фиг. 1 стрелками показаны направления воздушных потоков, осуществляющих охлаждение узлов электродвигателя. Через входной отверстие 19 в верхней 1 и нижней 3 частях корпуса двигателя потоки холодного воздуха попадают в полость двигателя и далее через отверстия 20 наклоненные в сторону вращения наружных 4 и 6 дисков ротора попадают в область расположения статорных катушек 15,16, осуществляя отвод тепла с обеих сторон каждой из обмоток за счет молекулярного трения воздуха о поверхность дисков 4, 5, 6. При низких скоростях вращения, когда недостаточно силы молекулярного трения, воздушные потоки подхватываются лопатками 19. Нагретые потоки воздуха через выходные отверстия 21 уносят нагретый воздух за пределы корпуса двигателя. Таким образом, в предлагаемом вентильном двигателе дискового типа путем подбора формы и геометрических соотношений размеров постоянных магнитов и статорных катушек обеспечена трапецеидальная форма зависимости момента на валу двигателя от угла поворота ротора каждой из фаз двигателя. Постоянство этой зависимости, полученное в предлагаемом двигателе в сочетании с оригинальной системой вентиляции, делает эффективным отбор тепла от обмоток статора и позволяет добиться высокого КПД (более 0,9) при скоростях вращения в десятки тысяч об/мин и получить показатели удельной мощности порядка 1 2 кВт/кг. Одновременно с этим благодаря тому, что в качестве модулятора магнитного потока, воздействующего на датчик Холла, используются отверстия в кольцевом магнитопроводе, обеспечивается устойчивая работа этого важного узла, а следовательно, и надежность работы электродвигателя в целом при упрощении его конструкции.
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Вентильный электродвигатель, содержащий расположенный в корпусе с возможностью вращения дисковый ротор с постоянными магнитами трапецеидальной формы, замкнутыми магнитопроводом, установленный в корпусе электродвигателя коаксиально относительно ротора статор, состоящий из расположенных в магнитном поле постоянных магнитов трапецеидального вида статорных катушек с радиальным расположением активных участков проводников, датчик положения ротора, расположенный напротив постоянных магнитов со стороны магнитопровода, отличающийся тем, что ширина активных участков проводников статорных катушек равна 0,2 0,4 длины полюсного деления, а угол, образованный радиусами, проходящими через середину активных участков проводников каждой из катушек, равен 360o/n, где n количество магнитов, при этом одно или оба основания каждого из постоянных магнитов трапецеидальной формы имеют вогнутый участок, а средняя линия трапеции перпендикулярна радиусу диска и составляет 0,7 0,9 длины полюсного деления, ротор состоит из трех параллельных дисков, а статор из двух статорных обмоток, каждая из которых расположена между наружным и внутренним дисками, причем наружные диски ротора, верхняя и нижняя части корпуса электродвигателя снабжены входными отверстиями, расположенными друг против друга, при этом входные отверстия на дисках находятся между осью ротора и постоянными магнитами, а боковая поверхность корпуса снабжена выходными отверстиями, расположенными напротив воздушных зазоров, образуемых дисками ротора и статорными обмотками. 2. Электродвигатель по п. 1, отличающийся тем, что входные отверстия в наружных дисках наклонены в направлении вращения и от центра диска к периферии. 3. Электродвигатель по п. 1, отличающийся тем, что выходные отверстия на боковой поверхности наклонены в сторону вращения двигателя. 4. Электродвигатель по п. 1, отличающийся тем, что наружные диски снабжены лопатками, обращенными в сторону внутреннего диска и расположенными между осью ротора и постоянными магнитами, при этом лопатки наклонены так, что ни одна из сторон каждой из лопаток не проходит через центр диска. 5. Электродвигатель по п. 1, отличающийся тем, что по крайней мере один из магнитопроводов имеет расположенные по окружности в зоне постоянных магнитов окна, напротив которых находятся датчики положения ротора, при этом расстояние между боковыми кромками окон определяется из соотношенияZ = (0,8 1,2) W /180,
где W длина хорды дуги окружности, проходящей через центры двух соседних окон;
— угол коммутации.