


Принцип работы реле направления мощности
Принципиальная схема реле направления мощности представлена на рис. 10. Работу реле рассмотрим на основе векторной диаграммы (рис. 11).
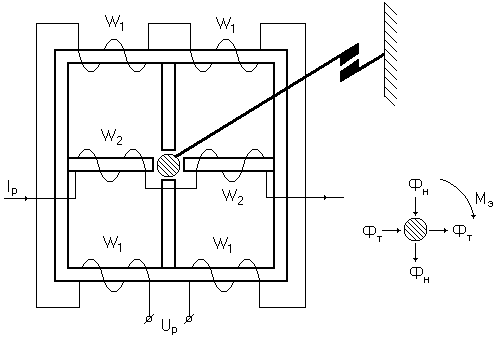
Рис. 10. Индукционное реле направления мощности.
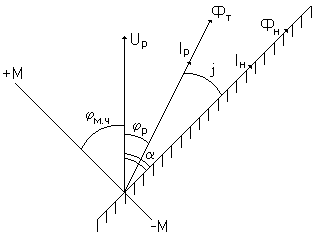
Рис. 11. Векторная диаграмма реле направления мощности.
Построение диаграммы начинают с вектора
напряжения реле ( )
и тока реле
)
и тока реле ,
угол между ними
,
угол между ними
Ток, протекающий через катушку напряжения
( ),
обозначают через
),
обозначают через .
Угол между
.
Угол между и
и ,
обозначенный как
,
обозначенный как ,
является внутренним углом реле (зависит
от параметров реле).
,
является внутренним углом реле (зависит
от параметров реле).
Т.к. вектора 
 ,
а также
,
а также и
и ,
совпадающие по направлению, то
электродинамический момент (
,
совпадающие по направлению, то
электродинамический момент ( )
определяется по выражению:
)
определяется по выражению: , (12)
, (12)
где 
Величина  ,
если
,
если .
И
.
И ,
если
,
если .
.
Максимальное значение  соответствует значению, при
соответствует значению, при
 — угол максимальной чувствительности.
Наличие данного угла обусловлено
следующей причиной: при КЗ угол
— угол максимальной чувствительности.
Наличие данного угла обусловлено
следующей причиной: при КЗ угол между
между и
и должен быть как можно ближе к
должен быть как можно ближе к .
. Недостаток направленных защит. Если КЗ
возникает в месте установки МТЗ
направленного действия, то 
 .
Реле направления мощности в данном
случае не работает.
.
Реле направления мощности в данном
случае не работает.Токовые отсечки
Токовые отсечки (ТО) являются разновидностью токовой защиты. Используются в качестве первых ступеней токовых защит.
То мгновенного действия

Рис. 12. Принцип действия ТО без выдержки времени.
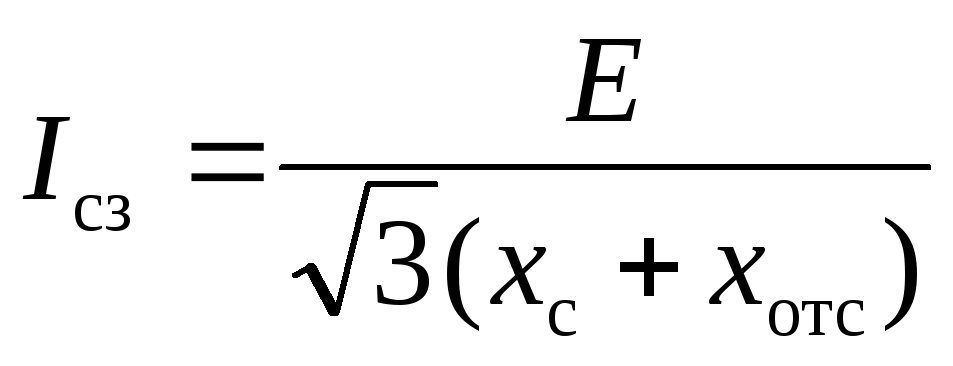
Характер изменения 
 ,
где
,
где — расстояние до точки КЗ, приведён на
рис. 12.
— расстояние до точки КЗ, приведён на
рис. 12. . (13)
. (13)
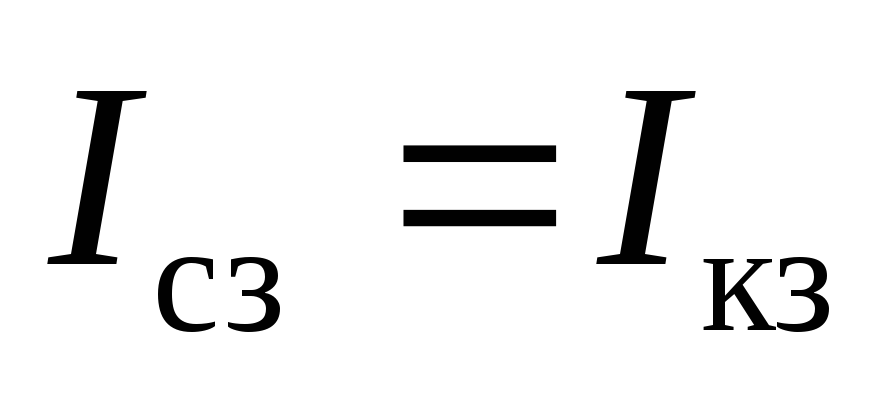
Ток  выбирают таким образом, чтобы защита
отключала КЗ на своей линии и не отключала
на соседней, т.е.:
выбирают таким образом, чтобы защита
отключала КЗ на своей линии и не отключала
на соседней, т.е.: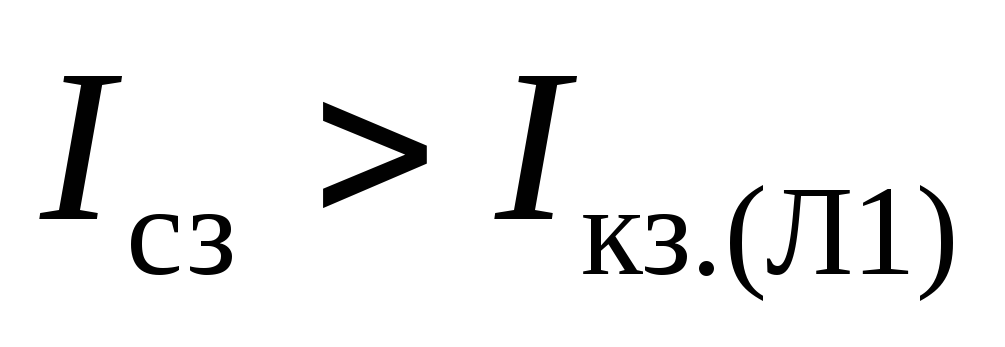
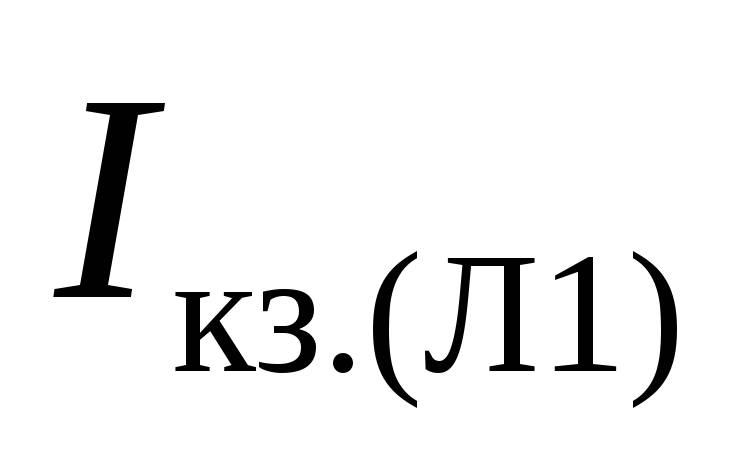 — максимальное значение
— максимальное значение при КЗ в начале следующей ЛЭП.
при КЗ в начале следующей ЛЭП.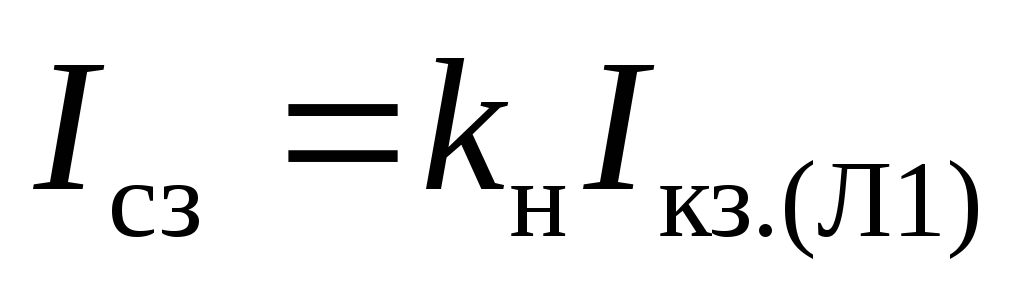 , (14)
, (14)
где  .
.
В расчётах всегда используют максимальное
значение тока КЗ ( ),
т.к. если расчёт будет произведён по
меньшему значению тока КЗ (например,
),
т.к. если расчёт будет произведён по
меньшему значению тока КЗ (например,
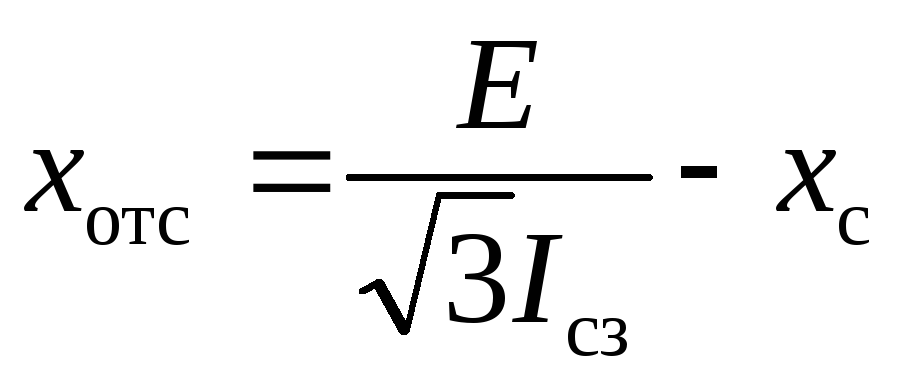
Точка М, в которой  ,
делит линию Л1 на две части: где
,
делит линию Л1 на две части: где — зона работы защиты и, где
— зона работы защиты и, где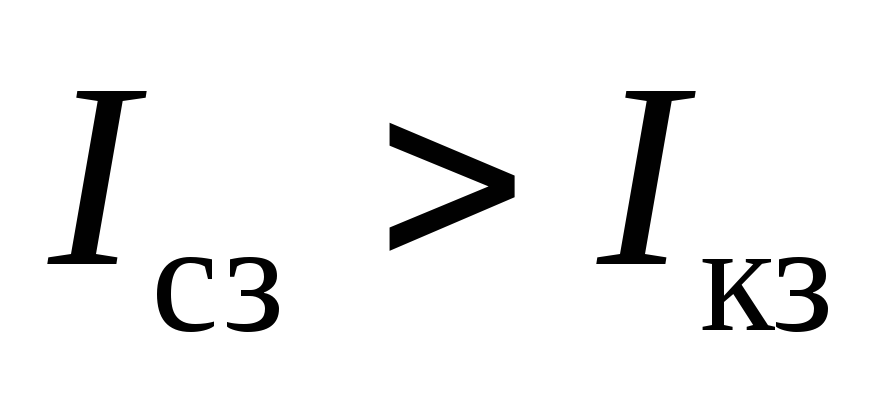 — «мёртвая зона» и защита не работает.
Наличие «мёртвой зоны» является
недостатком ТО. Величина такой зоны
может быть определена следующим образом:
— «мёртвая зона» и защита не работает.
Наличие «мёртвой зоны» является
недостатком ТО. Величина такой зоны
может быть определена следующим образом:
 ; (15)
; (15)
 ; (16)
; (16)
 ; (17)
; (17)
или
 . (18)
. (18)
Допустимо применение ТО, если её зона охватывает более 20 % от длины линии.
Для защиты части линии, не попавшей в зону ТО, применяют ещё одну ТО с выдержкой времени, которая выступает в качестве второй зоны токовой защиты.
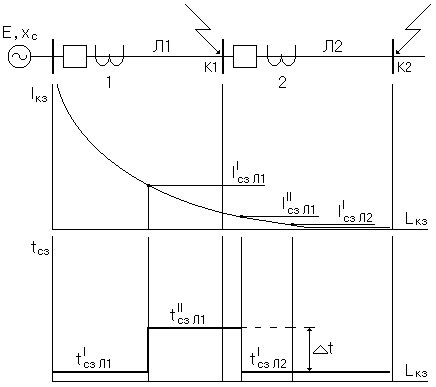
Рис. 13. График согласования ТО с выдержкой времени.
Ток  выбирают с учётом охвата всей защищаемой
линии. Для этого ток срабатывания
выбирают с учётом охвата всей защищаемой
линии. Для этого ток срабатывания согласуют с током срабатывания мгновенной
ТО следующей линии (Л2):
согласуют с током срабатывания мгновенной
ТО следующей линии (Л2):
 ; (19)
; (19)
 , (20)
, (20)где  .
.
 также согласуется с временем
также согласуется с временем :
:
 , (21)
, (21)
где  (с).
(с).
График согласования приведён на рис. 13.
Схема ТО без выдержки времени аналогична схеме МТЗ без реле времени. Схема ТО с выдержкой времени такая, как и схема МТЗ.
Защита линий 6-35 кВ с помощью трёхступенчатой токовой защиты
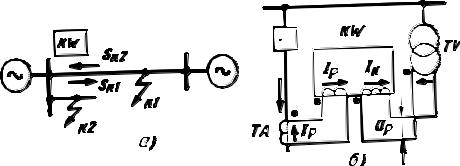
В качестве защиты линий 6-35 кВ чаще всего используют трёхступенчатую токовую защиту. Схема реализации приведена на рис. 14.

а)

б)
Рис. 14. Трёхступенчатая токовая защита:
а – упрощенная схема; б – временная характеристика.
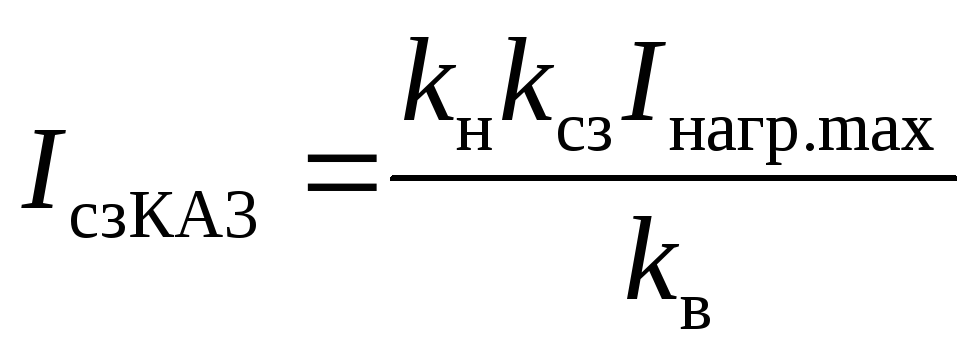
Iступень выполняется как ТО без выдержки времени. К ней относятся реле КА1 и КН1. Ток срабатывания реле:
 . (22)
. (22)
IIступень – ТО с выдержкой
времени (реле КА2, КТ2 и КН2). Ток согласуется с
согласуется с первых ступеней соседних ЛЭП. Время
первых ступеней соседних ЛЭП. Время больше, чем время
больше, чем время мгновенных ступеней соседних ЛЭП.
мгновенных ступеней соседних ЛЭП.
IIIступень – МТЗ (реле КА3, КТ3 и КН3).
 , (23)
, (23)
а время  согласуется с МТЗ соседних ЛЭП.
согласуется с МТЗ соседних ЛЭП.
Алгоритм работы.
При КЗ в точке К1 работают все токовые реле КА1, КА2, КА3, но отключение происходит без выдержки времени, т.к. при замыкании контактов КА1 питание катушка KLполучает мгновенно.
При КЗ в точке К2 реле КА1 не работает,
т.к.  .
Работают реле КА2 и КА3, получают питание
реле времени КТ2 и КТ3. Поскольку
.
Работают реле КА2 и КА3, получают питание
реле времени КТ2 и КТ3. Поскольку ,
то сигнал на релеKLподаётся
с реле КТ2.
,
то сигнал на релеKLподаётся
с реле КТ2.
При КЗ в точке К3 работает только реле КА3 и отключение КЗ производится с выдержкой времени третьей ступени.
Б.В. Соколов Реле направления мощности
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
КУЗБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра электроснабжения горных и промышленных предприятий
РЕЛЕ НАПРАВЛЕНИЯ МОЩНОСТИ
Методические указания к лабораторной работе по дисциплине «Релейная защита и автоматика СЭС»
для студентов направления 551700 «Электроэнергетика»
Составитель Б.В.Соколов Утверждены на заседании кафедры Протокол № 2 от 25.10.00 Рекомендованы к печати методической комиссией по направлению 551700 Протокол № 2 от 29.01.01
Электронная копия находится в библиотеке главного корпуса КузГТУ
Кемерово 2001
1
ЦЕЛИ РАБОТЫ:
1.Изучение принципа работы и конструкции индукционных реле направления мощности серии РБМ-171, РБМ-177.
2.Изучение принципа работы и особенностей реализации реле направления мощности на интегральных микросхемах серии РМ-11, РМ-12.
3.Ознакомление с основными параметрами реле направления мощности.
4.Получение практических навыков по проверке и регулировке параметров реле направления мощности.
1.ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ
1.1. Индукционные реле направления мощности
Реле направления мощности (РНМ) реагируют на значение и знак мощности S, подведенной к их зажимам. Они используются в схемах в качестве органа, который по направлению (знаку) мощности, протекающей по защищаемому элементу, определяет место, в котором произошло повреждение – на защищаемом элементе или на других присоединениях, отходящих от шин подстанции (рис. 1,а).
Рис.1. Реле направления мощности: а) принцип действия; б) схема включения
В первом случае (при КЗ в точке К1) мощность КЗ Sk1 направлена от шин в линию и считается положительной. В этом случае РНМ должно срабатывать и замыкать свои контакты. Во втором случае (при КЗ в точке К2) мощность КЗ Sk2 направлена от линии в шину. В этом случае реле
2
РНМ не должно срабатывать.
1.1.1.Конструкция и принцип действия индукционных реле направления мощности
Реле направления мощности индукционного типа имеет два измерительных органа: измерительный орган тока (ИОТ) и измерительный орган напряжения (ИОН).
Оно имеет две обмотки: одна питается напряжением Up, а другая – током Ip (рис. 1, б). Взаимодействие токов, проходящих по обмоткам такого реле, создает электромагнитный момент, значение и знак которого зависят от напряжения Up, тока Ip и угла сдвига ϕр между ними.
Реле направления мощности (в отличие от индукционных реле тока) выполняются мгновенными. Время их действия должно быть минимальным и практически составляет величину 0,04 с.
Индукционные реле мощности выполняются с подвижной системой в виде цилиндрического ротора (рис.2,а). Они имеют замкнутый четырехполюсный магнитопровод 1 с выступающими внутрь полюсами. Между полюсами установлен стальной цилиндр (сердечник) 2, предназначенный для повышения магнитной проницаемости междуполюсного пространства. Алюминиевый цилиндр (ротор) 3 может поворачиваться в зазоре между стальным сердечником и полюсами. При повороте ротора 3 происходит замыкание контактов реле 6.
Для возврата ротора и контактов в исходное положение предусматривается противодействующая пружина 7 (рис.2, б). Обмотка напряжения 4 питается напряжением Up = UС /KU, а обмотка тока 5 – током Ip =IC /KI , где UC и IC — напряжение и ток первичной сети (защищаемого элемента), KU,KI — коэффициенты трансформации измерительного трансформатора напряжения и измерительного трансформатора тока соответственно. Ток IH = Up /ZH, проходящий по обмотке напряжения 4, создает магнитный (поляризующий) поток напряжения Фн. Ток Ip , проходящий по обмотке тока 5, создает магнитный (рабочий) поток ФТ.
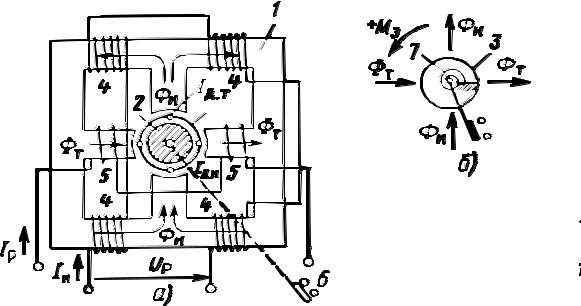
3
Рис.2. Реле направления мощности: а – с цилиндрическим ротором;
б – ротор реле и направление положительного момента Мэ
На рис. 3 изображена векторная диаграмма токов (потоков) индукционного реле. За исходный для ее построения принят вектор напряжения Up. Ток IH сдвинут (отстает) по фазе относительно напряжения Up на
угол α, а ток Ip – на угол сдвига по фазе ϕр.
Угол α определяется соотношением между индуктивным и активным сопротивлениями обмотки 4, питаемой напряжением. Он называется углом внутреннего сдвига реле и зависит от параметров сети и фаз, подведенных к реле UC и IC.
Магнитные потоки Ф& н и Ф& т изображены на диаграмме совпадающими с создающими их токами IH и Ip.

4
Рис.3. Векторная диаграмма реле мощ- | Рис.4. Характеристики чувст- |
ности | вительности реле мощно- |
| сти:1- теоретическая; |
| 2-действительная |
Из векторной диаграммы следует, что потоки Ф& н и Ф& т, а также токи IH и Ip сдвинуты по фазе на угол ψ ≡ α − ϕр, электромагнитный момент вращения МЭ равен: МЭ = k ФН ФТ sin ψ , где к – коэффициент пропорциональности.
Выражая ФН и ФТ через создающие их ток и напряжение, получим
МЭ = k1 UP IP sin(α − ϕр) = k1 SP, | (1) |
где SP = UP IP sin(α − ϕр) — мощность, подведенная к реле. Анализируя выражение (1), можно сделать следующие выводы:
−электромагнитный момент (вращения) реле пропорционален мощности на его зажимах;
−знак электромагнитного момента реле определяется знаком сомножи-
теля sin(α − ϕP) и зависит от значения ϕP и угла внутреннего сдвига α. Это иллюстрируется рис. 3, где зона отрицательных моментов заштрихована. Незаштрихованная часть диаграммы соответствует области положительных моментов (где Ф& т опережает Ф& н), а ϕP и его синус име-
I&р .
α − ϕр =90°,
5
ют положительный знак.
Линия АВ называется линией изменения знака момента. Она всегда расположена под углом α к вектору U& р, т. е. совпадает с направлением
векторов &Iн иФ& н.
Линия CD (перпендикулярная линии AB) называется линией максимальных моментов. Электромагнитный момент МЭ достигает максимума
при т. е. когда &Iр опережает &Iн на 90°. Угол ϕр, при котором МЭ достигает максимального значения, называется углом максималь-
ной чувствительности ϕмч. Он образуется линией максимальных моментов и вектором подведенного к реле напряжения (зависит от величины
угла внутреннего сдвига α).
Реле не действует, если в нем отсутствует напряжение или ток, а также если sin(α − ϕр) = 0. Последнее условие имеет место при ϕр = α
или ϕр = α + 180°.
Таким образом, выражение (1) и рис. 3 показывают, что реле рассматриваемой конструкции реагирует на знак мощности Sк или, иными
словами, – на угол сдвига ϕр между напряжением U& р и током
1.1.2.Основные характеристики индукционного реле направления мощности
Минимальная подведенная к реле мощность, при которой оно срабатывает (замыкает свои контакты), называется мощностью срабатывания
реле Scp. Зависимость мощности срабатывания реле от тока I&р и угла ϕр
принято оценивать характеристикой чувствительности и угловой характеристикой.
Характеристика чувствительности представляет собой зависи-
мость Uср = f (Ip) при неизменном ϕр (рис. 4). Uср min — наименьшее напряжение, необходимое для действия реле (при данных значениях I&р и
ϕр). Обычно эта характеристика снимается при ϕр, равном углу макси-

6
мальной чувствительности, т. е. для случая, когда sin(α − ϕр) = 1. Угловая характеристика представляет собой зависимость
Uср = f (ϕр) при неизменном значении Ip. На рис. 5 она показана для реле смешанного типа с α= + 45°.
Рис. 5. Угловая характеристика реле мощности при α = 45°
Угловая характеристика позволяет определить:
— изменение чувствительности реле (характеризуемое величиной Uср) при разных значениях угла ϕр;
-минимальное значение напряжения Uср min и наиболее выгод-
ную зону углов ϕр, в пределах которой Uср близко к Uср min ;
-при каких углах ϕр меняется знак электромагнитного момента
ипределы углов ϕр, которым соответствуют положительные и отрицательные моменты.
Знак электромагнитного момента реле зависит от относительного
направления токовI&р и I&н в его обмотках. Принято изготовлять РНМ
так, чтобы реле замыкало свои контакты при одинаковом направлении токов в обмотках напряжения и тока. Одинаковым называется направле-
7
ние тока в обеих обмотках от начала к концу обмотки или наоборот. При изготовлении реле указывают однополярные зажимы обмоток, отмечая их начало условным знаком (точкой).
Реле РНМ подключается к трансформатору тока (токовая обмотка) и к трансформатору напряжения (обмотка напряжения) с учетом полярности обмоток так, чтобы при КЗ в защищаемом объекте оно замыкало свои контакты (срабатывало).
Самоходом РНМ называют срабатывание его при прохождении тока только в одной его обмотке – токовой или напряжения. Реле, имеющее самоход от тока, может неправильно срабатывать при обратном направлении мощности, когда повреждение возникает в непосредственной близости от реле в зоне его недействия, в результате чего напряжение на его зажимах будет равно нулю.
Причиной самохода обычно является несимметрия магнитных систем реле относительно цилиндрического ротора. Для устранения самохода на стальном сердечнике 2 (рис. 2, а) предусмотрен срез. Изменяя положения сердечника, можно компенсировать неравномерность потоков в воздушном зазоре.
1.1.3. Индукционные реле мощности типа РБМ
В настоящее время находят широкое применение быстродействующие реле направления мощности типа РБМ–170. Их конструктивное выполнение соответствует варианту, показанному на рис. 6.
Электромагнитный момент реле выражается уравнением
МЭ = k UP IP sin(α − ϕр)= k UP IP cos(ϕр + β) = = k UP IP cos(ϕр +ϕмч),
где β= 90−α .
Имеются два основных варианта исполнения реле этой серии: РБМ171 и РБМ-271. Они обычно используются для включения на фазный ток и междуфазное напряжение. Угол максимальной чувствительности у этих
реле может изменяться и имеет два значения: ϕ | = −45° и | ϕ | = −30°. |
мч |
| мч |
|
Реле РБМ-178, РБМ-278 и РБМ-177, РБМ-277 включаются на ток и напряжение нулевой последовательности. Угол их максимальной чувст-
вительности ϕмч= +70°. Для реле РБМ-178 и РБМ-278 S cp=0,2…4 ВА, для

8
реле РБМ-177 и РБМ-277 S cp=0,6…3 ВА.
Реле РБМ-271, РБМ-277, РБМ-278 – двустороннего действия и имеют два замыкающих контакта.
Индукционные РНМ в настоящее время сняты с производства. Однако в эксплуатации находится большое количество таких реле. Промышленностью освоен выпуск РНМ на интегральных микросхемах серий РМ-11 (с угловой характеристикой, аналогичной РБМ-171) и РМ-12 (с угловой характеристикой, аналогичной РБМ-178).
Рис. 6. Реле направления мощности серии РБМ: 1-токовая обмотка; 2-обмотка напряжения; 3-полюсы; 4-ротор; 5-спиральная пружина; 6-подпятник; 7-ось; 8-ограничитель угла; 9-подвижный контакт; 10-неподвижный контакт;11-стойка; 12-площадка; 13-ярмо
1.2. Реле направления мощности на интегральных микросхемах
Реле направления мощности на интегральных микросхемах выпол-
9
няются в виде реле мощности (РМ-11, РМ-12) и реле сопротивления (РС). Воздействующими на них величинами также являются две входных величины: напряжение и ток защищаемого объекта (UP и IP).
При построении РНМ на интегральных микросхемах (ИМС) используется в основном принцип сравнения фаз двух входных величин (UI и UII), позволяющий получить большее быстродействие, чем у реле, построенных на сравнении абсолютных значений напряжений. Ниже рассмотрены реле серии РМ-10 (РМ-11, РМ-12), выпускаемые вместо индукционных реле типов РБМ-171 и РБМ-177. Новые РНМ типа РМ-10 изготовляются из отдельных электронных элементов, операционных усилителей (ОУ) и ИМС. В основе их работы лежит принцип раздельного сравнения времени совпадения мгновенных значений двух электрических величин (напряжений) с временем их несовпадения в положительном полупериоде с аналогичными величинами в отрицательном полупериоде. Этим достигается отстройка реле от апериодических составляющих во входных сравниваемых величинах.
Структурная схема реле представлена на рис.7. Ее основными элементами являются: узел измерения (УИ), узел формирования (УФ), узел сравнения (УС), узел выхода (УВ), узел питания (УП). Узлы 1 и 2 включают в себя блоки (узлы) измерения и преобразования. Блоки измерения являются промежуточными преобразователями (датчиками) напряжения (ДН) и тока (ДТ) соответственно. Они обеспечивают гальваническую развязку полупроводниковой части реле от вторичных цепей первичных из-
мерительных преобразователей. Входные сигналы (напряжение U&р и ток I&р) на их входы поступают от измерительных трансформаторов напряже-
ния ТН (TV) и тока ТТ (TA) защищаемого объекта. В узлах измерения входные сигналы преобразуются в пропорциональные им напряжения
U&u = kU Up и U&I = kI Ip. Затем они поступают в узлы формирования. В
узле формирования эти сигналы приводятся к виду, удобному для работы узла сравнения (для реализации требуемой характеристики срабатывания реле). В узле формирования блока 1 напряжение UU с помощью фазоповоротной схемы (фазоповоротного устройства) сдвигается по фазе относительно вектора Up на некоторый постоянный угол α.
Реле направления мощности. Назначение, конструкция, принцип действия.
РЕЛЕ НАПРВЛЕНИЯ МОЩНОСТИ В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОСНАБЖЕНИЕМ
Цель работы:изучить принцип действия реле направления мощности, его основные параметры и характеристики.
Теоретическая часть
Реле направления мощности. Назначение, конструкция, принцип действия.
Реле направления мощности применяются в различных устройствах релейной защиты для определения знака мощности при коротких замыканиях. Внешний вид реле направления мощности приведен на рисунке 1.1.
Реле имеет две обмотки. Одна из них подключается к трансформатору тока и обтекается вторичным током Iр, а вторая- к трансформатору напряжения и обтекается током, пропорциональным напряжению Uр на зажимах обмотки.
Каждый из токов создает магнитный поток. Поскольку один из магнитных потоков пропорционален току Iр, а второй напряжению Uр, то вращающий момент возникающий на подвижной части реле оказывается пропорциональным величине мощности на зажимах реле, а его направление (знак) зависит от направления этой мощности.

Рисунок 1.1-Внешний вид реле направления мощности марки
OptiDin OM-110

Рисунок 1.2-Реле направления мощности
В схемах релейной защиты используется главным образом однофазные индукционные реле направления мощности с цилиндрическим ротором типов РБМ-170 и РБМ-270.
Рисунок 1.3-Токовая обмотка реле направления мощности
Токовая обмотка расположенная на полюсах и создает через них проходящий магнитный поток Фт. Обмотка напряжения расположенная на ярме и состоит из четырех секций, который соединены между собой так, что магнитный поток Фн создаваемый ими проходил через другую пару полюсов. При таком выполнении обмоток магнитный потоки Фт и Фн оказываются сдвинутыми в пространстве относительно друг друга на угол 900. Магнитные потоки Фт и Фн создают токи в стенках алюминиевого сердечника пропорциональные им на угол y токи Idт и Idн. В результате взаимодействия магнитного потока Фт с током Idн и Фн с током Idт на цилиндр действуют силы:
 (1.1)
(1.1)
Суммарная сила создает на цилиндре вращающий момент Мвр, под действием которого цилиндр поворачивается и с помощью подвижных контактов замыкает неподвижные. Общее выражение для вращающего момента индукционного реле имеет вид:
 (1.2)
(1.2)
Из выражения (1.2) следует, что когда магнитные потоки совпадают по фазе, т.е. y=0, siny=0, то Мвр=0, и наоборот когда y=900, siny=1, то Мвр=max.
Рисунок 1.4-Векторная диаграмма
На векторной диаграмме :
φр— угол сдвига между Uр и Iр определяемый параметрами сети и схемой включения реле;
Iн – вектор тока в обмотке напряжения реле;
γн — угол между Uр и Iн (внутренний угол реле) определяемый соотношением активного и реактивного сопротивлений цепи напряжения, которая включает в себя как обмотку, так и дополнительно включаемые внешние сопротивления и конденсаторы.
Заменяя в выражении (1.2) магнитные потоки Фт и Фн на соответствующие им ток Iр и напряжение Uр и угол y равным ему углом γн-φр получим общее выражение для вращающего момента на подвижной части индукционного реле с цилиндрическим ротором:
 , (1.3)
, (1.3)
Но в этом выражении:
 (1.4)
(1.4)
Следовательно, вращающий момент рассматриваемого реле пропорционален мощности: Мвр=кSр, т.е. реле реагирует на мощность.
Читайте также:
Рекомендуемые страницы:
Поиск по сайту
2.5.2. Реле направления мощности. Релейная защита в распределительных электрических Б90 сетях
2.5.2. Реле направления мощности
Для того чтобы определить направление мощности, передаваемой по контролируемой электрической сети, в месте установки защиты используют специальное реле — реле направления мощности. Отечественная промышленность выпускает реле направления мощности двух видов: индукционные (серий РБМ-170 и РБМ-270) и микроэлектронные (типа РМ-11 и РМ-12) [3].
Индукционное реле направления мощности [2, 3] имеет две обмотки, размещенные на полюсах замкнутого стального магнитопровода 1 (рис. 2.17). Одна из них, токовая (4) включается во вторичные цепи ТТ, и ток в ней (Ip) определяется вторичным током ТТ. Вторая — потенциальная (5) — подключается ко вторичной обмотке трансформатора напряжения (ТН), и ток в ней (IH) пропорционален подведенному напряжению (UH). Между полюсами расположен внутренний стальной сердечник 2 цилиндрической формы и алюминиевый ротор 3, имеющий форму стакана. На роторе укреплен контактный мостик 6. При направлении мощности КЗ от шин в линию этот мостик замыкает неподвижные выходные контакты 7 (реле срабатывает). Возврат реле происходит под воздействием противодействующей пружины 8.

Магнитные потоки, создаваемые катушками с соответствующими токами, сдвинуты в пространстве на угол 90°. Взаимодействие потоков с токами, индуктированными ими в роторе, создает вращающий момент, который заставляет ротор поворачиваться. Если магнитные потоки имеют синусоидальную форму, то вращающий момент МВР ~ ФI ? ФU ? sin?. Здесь ФI и ФU — магнитные потоки, создаваемые токовой и потенциальной катушками соответственно; T — электрический угол между магнитными потоками ФI и ФU.
На рис. 2.18 показана векторная диаграмма, поясняющая принцип действия реле. Приняты следующие обозначения: ?p и ?H — векторы тока и напряжения, подведенных к реле; ?р — угол между векторами ?p и ?H, определяемый параметрами силовой электрической сети и схемой включения реле; ?H — вектор тока в потенциальной катушке реле; ? — угол между векторами ?H и ?H (угол внутреннего сдвига), определяемый соотношением активного и реактивного сопротивлений цепи потенциальной катушки.
Учитывая, что ФI ~ Ip, ФU ~ IH~ UH, а ? = ? — ?р, можно получить:
MBP = kp ? UH ? IP ? sin (? — ?р).

В этом выражении kp — постоянный коэффициент, определяемый параметрами реле, а UH ? Ip ? sin (? ? ?р) = Sp — мощность на зажимах реле. Следовательно, вращающий момент реле пропорционален мощности: MBP = kp ? Sp, то есть реле реагирует на мощность.
Вращающий момент реле равен нулю, когда sin (? — ?р) = 0. Отсюда следует, что MBP = 0, если ?р = ? при отставании и если ?р = (? + 180°) при опережении вектором ?p вектора ?H. Линия, расположенная под этим углом к вектору ?H, называется линией нулевых моментов или линией изменения знака момента [2, 3].
Угол ?р между векторами ?P и ?H, при котором вращающий момент имеет максимальное значение, принято называть углом максимальной чувствительности ?МЧ. Линия, расположенная к вектору ?H под углом ?МЧ, называется линией максимального момента.
Если внутренний угол ? = 0 (рис. 2.19, а), то вращающий момент MBP = kp ? UH ? Ip ? sin (??р) в реле пропорционален реактивной мощности, подведенной к реле (синусное реле или реле реактивной мощности). Эти реле выполняют так, что MBP положителен, если угол ?р < 0 (то есть MBP = kp ? UH ? Ip ? sin ?р). Угол максимальной чувствительности для синусного реле ?МЧ = 90°.
Если внутренний угол ? = 90° (рис. 2.19, б), то вращающий момент
MBP = kp ? UH ? IP ? sin (90 ? ?р) = kp ? UH ? IP ? cos ?р
пропорционален активной мощности, подведенной к реле (косинусное реле или реле активной мощности). Для косинусного реле ?МЧ = 0°.

В реле смешанного типа (см. рис. 2.18) угол а может иметь значения от 0° до 90°. У отечественных реле смешанного типа (РБМ-171, РБМ-271) угол а изменяется дискретно: ? = 45° (?МЧ = 45°) или ? = 60° (?мч = 30°).
Срабатывание реле направления мощности происходит при выполнении условия:
MBP ? МПР,
где МПР — противодействующий момент, который определяется силой противодействия возвратной пружины, трением в подшипниках реле и силой нажатия контактов при срабатывании реле.
Поскольку вращающий момент реле пропорционален подведенной к нему мощности, то реле срабатывает при определенном произведении UH ? Ip. Минимальное значение мощности на зажимах реле, при котором оно срабатывает, принято называть мощностью срабатывания реле SCP. Для большинства индукционных реле SCP = (0,2 ? 4) B ? A.
Чувствительность реле оценивается по вольт-амперной характеристике, которая представляет собой зависимость напряжения срабатывания реле от тока (рис. 2.20, а), при неизменном угле между векторами ?H и ?p равном углу максимальной чувствительности [3].

Зависимость мощности срабатывания реле от угла между векторами ?H и ?p при неизменном токе принято называть угловой характеристикой реле (рис. 2.20, б) [2]. Она определяет зоны срабатывания и несрабатывания реле. Как видно, при углах, соответствующих изменению направления вращающего момента, мощность срабатывания возрастает и стремится к бесконечности. При ?р = ?МЧ мощность срабатывания реле имеет минимальное значение.
Принцип действия микроэлектронных статических реле направления мощности РМ-11 и РМ-12 основан на измерении длительности интервалов времени, при котором напряжение и ток, подведенные к реле, имеют одинаковый знак. Время совпадения знака сигналов измеряется в течение каждого полупериода и сравнивается с уставкой. При определенной продолжительности времени совпадения знаков сигналов реле срабатывает. Эти реле превосходят индукционные по многим основным характеристикам и широко используются в системах релейной защиты [3].
Данный текст является ознакомительным фрагментом.Читать книгу целиком
Поделитесь на страничкеСледующая глава >
Моделирование реле направления мощности | FaultAn.ru
Реле направления мощности (РНМ) используется при реализации направленных защит, позволяющих обеспечить срабатывание только при определённом направлении мощности в определённом режиме работы сети.
Обычно используются РНМ с характеристикой срабатывания, приведённой на рис. 1 [1].
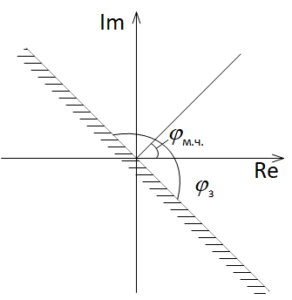
Рис. 1. Характеристика реле направления мощности
У представленного на рис. 1 РНМ 2 уставки: угол максимальной чувствительности φм.ч. и ширина зоны φз. Учёт минимального значения тока и напряжения при расчёте мощности предполагается вне логики данного реле.
Реле реагирует на значение угла входного замера комплексной мощности S. Срабатывание реле происходит при выполнении условия
При реализации данного условия в Simulink необходимо учесть, что стандартный элемент расчёта фазы выдаёт значение угла комплексного числа в диапазоне от —π до π. В связи с этим возникают определённые сложности при реализации реле, у которого нет ограничений при задании его уставок.
Будем считать, что угол максимальной чувствительности можно задавать в диапазоне φм.ч. от 0° до 360°, а ширина зоны не превышает 180°. При реализации реле, помимо приведённого выше, необходимо учесть следующие условия:
- если
 , то если , то на вход реле подаётся замер угла мощности ;
, то если , то на вход реле подаётся замер угла мощности ; - если , то из значений углов границы зоны срабатывания реле необходимо вычесть 360°.
 , то если
, то если  , то на вход реле подаётся замер угла мощности
, то на вход реле подаётся замер угла мощности  ;
; , то из значений углов границы зоны срабатывания реле необходимо вычесть 360°.
, то из значений углов границы зоны срабатывания реле необходимо вычесть 360°.Вариант реализации реле направления мощности в Simulink приведён в файле power_direction_relay.mdl. Вид схемы приведён на рис. 2. На вход реле подаётся значение комплексной мощности.
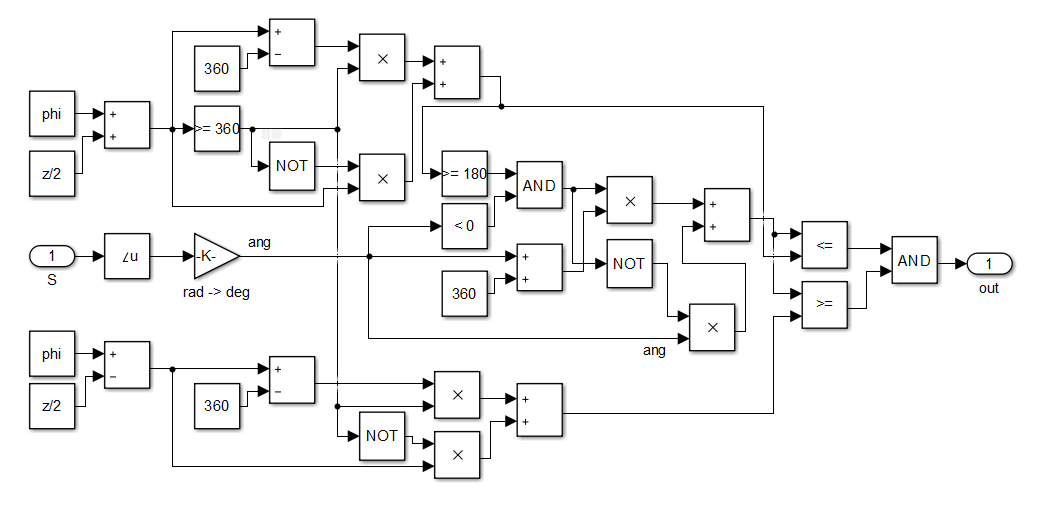
Рис. 2. Реализация РНМ в Simulink
Протестируем полученное реле. Для этого будем использовать схему, представленную на рис. 3.
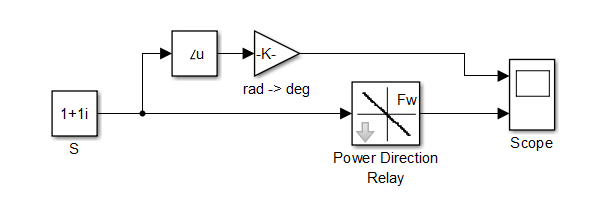
Рис. 3. Схема для тестирования инверсной выдержки времени в Simulink
Будем изменять значение мощности на входе реле и проверять срабатывание. Выставим уставки реле φм.ч. = 45° и φз = 180°. На рис. 4 приведены результаты срабатывания РНМ при различных значениях входной мощности.
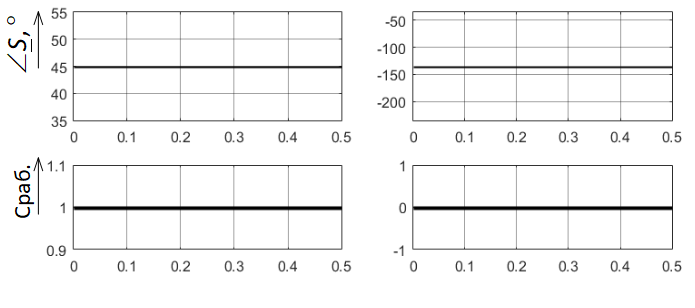
Рис. 4. Результаты тестирования РНМ
Выставим уставки реле φм.ч. = 225° и φз = 180°. На рис. 5 приведены результаты срабатывания РНМ при различных значениях входной мощности.
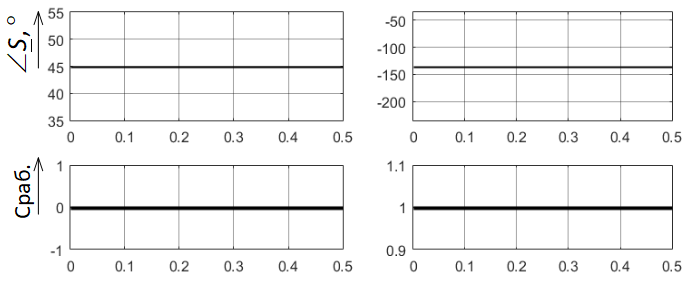
Рис. 5. Результаты тестирования РНМ
Итак, мы смоделировали и протестировали РНМ.
Список использованной литературы:
- Шнеерсон Э.М. Цифровая релейная защита. – М.: Энергоатомиздат, 2007.
Рекомендуемые записи
Реле мощности | Область использования, особенности работы, структура, возможности – на промышленном портале Myfta.Ru
Реле мощности в большинстве случаев определяют, где именно случилась аварийная ситуация или какая-то нестыковка. Но если производить более точную оценку того, правильно ли работает реле направления мощности, намного удобнее использовать такую формулу вращающегося момента, которая выражается через напряжение, которое подводится к прибору.
Для того чтобы устройство правильно работало, необходимо, чтобы напряжение, которое к нему подводится, было больше чем Ucvmin.
Оно будет включенным, когда будут несимметричные короткие замыкания. На маленькой среде базируется мертвая зона, но она появляется только в металлических трехфазных замыканиях.
Вторичные потоки измеряют, когда проводят проверку направленных защит, также токи небаланса в нулевых проводах и в рабочих обмотках дифференциальных защит.
Потом смотрят на правильность подсоединения цепей напряжения к прибору с помощью изъятия векторных диаграмм. В тоже время, когда снимаются векторные диаграммы, обязательно проверяют также и зоны, в которых действуют реле направления мощности, а также поддают проверке именно сам выбор направления реле мощности направленных защит.
И, наконец, реле направления мощности (РМ) также могут использоваться, например, в самых разных устройствах защиты для того, чтобы определить мощность.
Структура: У этого устройства есть две обмотки. Первая имеет подключение к ТТ, а также она обволакивается вторичным током Iр, тогда как вторая имеет подключение к ТН и обволакивается таким током, который прямо пропорциональный тому напряжению, которое находится на зажимах (Uр).
Эти два тока имеют свои разные потоки. Они пропорциональный разным токам (первый – Ip, второй — Uр), при таком раскладе направление мощности, то есть знак вращающегося момента, напрямую определяет направленность данной мощности.
Реле ограничения мощности
С помощью данного прибора можно:
- Во-первых, обезопасить покупателя от некоторых некачественных деталей в электрической сети;
- Во-вторых, его используют также для отключения загрузки, когда мощность, которую используют, зашкаливает за нормы, на некоторый период времени;
- В-третьих, его используют при неполном выключении загрузки, когда напряжение зашкаливает за норму на какой-то определенный период времени;
- Его также используют при напряжении нулевом, обратном, а также в напряженной последовательности;
- Когда используется загрузка очень высокой мощности;
- Также используется при предупреждении об возможных аварийных ситуациях;
- Также их используют, корда загрузка подключается дистанционно к интерфейсу;
- Данное устройство может поддерживать работу с той нагрузкой, которая превышает 2,5 кВт и они также поддерживают работу с нагрузкой до 30 кВт.
- Также при не очень качественном напряжении, характерными для этой ситуации есть очень большие скачки напряжения, перекос, нарушение очередности;
- Если вы пресекаете допустимый предел тока, то есть превышаете максимум, и слишком увеличиваете загрузку.
Реле ограничения мощности ОМ-110
Реле ограничения мощности ОМ-110 используется для проведения контроля активной или полной мощности однофазной нагрузки.Диапазон, который поддается измерению: от 0 до 20 кВт возможно также от 0 до 20 кВА.
Возможности ОМ-110: отключает некоторые загрузки, при чрезмерном увеличении уровня загрузки, после этого автоматически производит включение.
Можно увидеть, что спереди на устройстве находятся специальные потенциометры, а также дип-переключатели, с помощью которых человек может быстро уяснить:
- Во-первых, это максимальный уровень мощности;
- Во-вторых, это время срабатывания;
- В-третьих, это также время задержки автоматического повторного включения (АПВ).
Измерение мощности, которую он потребляет, происходит без роз соединения электрической цепи, при этом используется специальный токовый датчик, который встроенный в сам прибор.
Модель ОМ-110 может применяться, например, как цифровой ваттметр, то есть как прибор, который измеряет мощность как активной, так и погной.
Также она может применяться как устройство ограничения мощности, которая потребляется.
Питание ОМ-110 осуществляется от цепей измерения напряжения.
Реле направления мощности
Реле направления мощности
Для того чтобы определить направление мощности, передаваемой по контролируемой электрической сети, в месте установки защиты используют специальное реле — реле направления мощности. Отечественная промышленность выпускает реле направления мощности двух видов: индукционные (серий РБМ-170 и РБМ-270) и микроэлектронные (типа РМ-11 и РМ-12) .
Индукционное реле направления мощности [2, 3] имеет две обмотки, размещенные на полюсах замкнутого стального магнитопровода 1 (17). Одна из них, токовая (4) включается во вторичные цепи ТТ, и ток в ней (Ip) определяется вторичным током ТТ. Вторая — потенциальная (5) — подключается ко вторичной обмотке трансформатора напряжения (ТН), и ток в ней (IH) пропорционален подведенному напряжению (UH). Между полюсами расположен внутренний стальной сердечник 2 цилиндрической формы и алюминиевый ротор 3, имеющий форму стакана. На роторе укреплен контактный мостик 6. При направлении мощности КЗ от шин в линию этот мостик замыкает неподвижные выходные контакты 7 (реле срабатывает). Возврат реле происходит под воздействием противодействующей пружины 8.
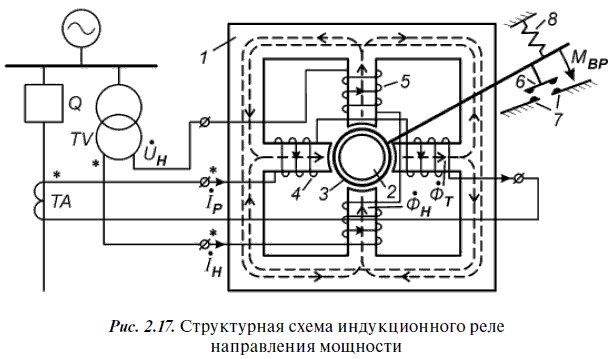
Магнитные потоки, создаваемые катушками с соответствующими токами, сдвинуты в пространстве на угол 90°. Взаимодействие потоков с токами, индуктированными ими в роторе, создает вращающий момент, который заставляет ротор поворачиваться. Если магнитные потоки имеют синусоидальную форму, то вращающий момент МВР ~ ФI × ФU × sinΨ. Здесь ФI и ФU — магнитные потоки, создаваемые токовой и потенциальной катушками соответственно; T — электрический угол между магнитными потоками ФI и ФU.
На 18 показана векторная диаграмма, поясняющая принцип действия реле. Приняты следующие обозначения: Ípи ÚH — векторы тока и напряжения, подведенных к реле; φр — угол между векторами Íp и ÚH, определяемый параметрами силовой электрической сети и схемой включения реле; ÍH — вектор тока в потенциальной катушке реле; α — угол между векторами ÍH и ÚH (угол внутреннего сдвига), определяемый соотношением активного и реактивного сопротивлений цепи потенциальной катушки.
Учитывая, что ФI ~ Ip, ФU ~ IH~ UH, а Ψ = α — φр, можно получить:
M BP = kp × UH × IP × sin (α — φр).

В этом выражении kp — постоянный коэффициент, определяемый параметрами реле, а UH × Ip × sin (α − φр) =Sp — мощность на зажимах реле. Следовательно, вращающий момент реле пропорционален мощности: MBP =kp × Sp, то есть реле реагирует на мощность.
Вращающий момент реле равен нулю, когда sin (α — φр) = 0. Отсюда следует, что MBP = 0, если φр = α при отставании и если φр = (α + 180°) при опережении вектором Íp вектора ÚH. Линия, расположенная под этим углом к вектору ÚH, называется линией нулевых моментов или линией изменения знака момента [2, 3].
Угол φр между векторами ÍP и ÚH, при котором вращающий момент имеет максимальное значение, принято называть углом максимальной чувствительности φМЧ. Линия, расположенная к вектору ÚH под углом φМЧ, называется линией максимального момента.
Если внутренний угол α = 0 (19, а), то вращающий момент MBP = kp × UH × Ip × sin (−φр) в реле пропорционален реактивной мощности, подведенной к реле (синусное реле или реле реактивной мощности). Эти реле выполняют так, что MBP положителен, если угол φр < 0 (то есть MBP = kp × UH × Ip × sin φр). Угол максимальной чувствительности для синусного реле φМЧ = 90°.
Если внутренний угол α = 90° (19, б), то вращающий момент
M BP = kp × UH × IP × sin (90 − φр) = kp × UH × IP × cos φр
пропорционален активной мощности, подведенной к реле (косинусное реле или реле активной мощности). Для косинусного реле φМЧ = 0°.

В реле смешанного типа (см. 18) угол а может иметь значения от 0° до 90°. У отечественных реле смешанного типа (РБМ-171, РБМ-271) угол а изменяется дискретно: α = 45° (φМЧ = 45°) или α = 60° (φмч = 30°).
Срабатывание реле направления мощности происходит при выполнении условия:
M BP ≥ МПР,
где МПР — противодействующий момент, который определяется силой противодействия возвратной пружины, трением в подшипниках реле и силой нажатия контактов при срабатывании реле.
Поскольку вращающий момент реле пропорционален подведенной к нему мощности, то реле срабатывает при определенном произведении UH × Ip. Минимальное значение мощности на зажимах реле, при котором оно срабатывает, принято называть мощностью срабатывания реле SCP. Для большинства индукционных реле SCP = (0,2 − 4) B × A.
Чувствительность реле оценивается по вольт-амперной характеристике, которая представляет собой зависимость напряжения срабатывания реле от тока (20, а), при неизменном угле между векторами ÚH и Ípравном углу максимальной чувствительности .
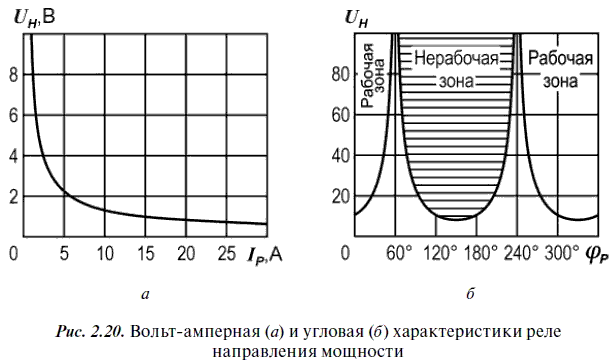
Зависимость мощности срабатывания реле от угла между векторами ÚH и Íp при неизменном токе принято называть угловой характеристикой реле (20, б) . Она определяет зоны срабатывания и несрабатывания реле. Как видно, при углах, соответствующих изменению направления вращающего момента, мощность срабатывания возрастает и стремится к бесконечности. При φр = φМЧ мощность срабатывания реле имеет минимальное значение.
Принцип действия микроэлектронных статических реле направления мощности РМ-11 и РМ-12 основан на измерении длительности интервалов времени, при котором напряжение и ток, подведенные к реле, имеют одинаковый знак. Время совпадения знака сигналов измеряется в течение каждого полупериода и сравнивается с уставкой. При определенной продолжительности времени совпадения знаков сигналов реле срабатывает. Эти реле превосходят индукционные по многим основным характеристикам и широко используются в системах релейной защиты .