


Применение датчиков в промышленном оборудовании / Статьи и обзоры / Элек.ру
В промышленной электронике индуктивные, оптические и другие датчики применяются очень широко. Долго и постоянно имею с ними дело, так как работаю инженером-электронщиком на крупном предприятии. Статья будет обзорной, но есть и реальные примеры.

Типы датчиков
Итак, что вообще такое датчик. Датчик — это устройство, которое выдает определенный сигнал при наступлении какого-либо определенного события. Иначе говоря, датчик при определенном условии активируется, и на его выходе появляется аналоговый (пропорциональный входному воздействию) или дискретный (бинарный, цифровой, т.е. два возможных уровня) сигнал. Датчики могут называться также сенсорами или инициаторами.
Оптический датчик отслеживает перемещение |

Датчиков великое множество. Перечислю лишь те разновидности, с которыми приходится сталкиваться электрику и электронщику.
Индуктивные. Активируется наличием металла в зоне срабатывания. Другие названия — датчик приближения, датчик положения, индукционный, датчик присутствия, индуктивный выключатель, бесконтактный датчик или выключатель. Смысл один, и не надо путать. По-английски пишут «proximity sensor». Фактически это — датчик металла.
Оптические. Другие названия — фотодатчик, фотоэлектрический датчик, оптический выключатель. Такие применяются и в быту, называются «датчик освещенности». Разновидность оптических датчиков — инфракрасные датчики движения, которые срабатывают на изменение температуры в зоне действия.
Емкостные. Срабатывает на наличие практически любого предмета или вещества в поле активности.
Давления. Если этот датчик дискретный, то принцип работы очень прост. Давления воздуха или масла нет — датчик выдает сигнал на контроллер или рвет аварийную цепь. Может быть датчик для измерения давления с токовым выходом, ток которого пропорционален абсолютному давлению либо дифференциальному.
Пример работы концевых выключателей — нижний датчик активирован |
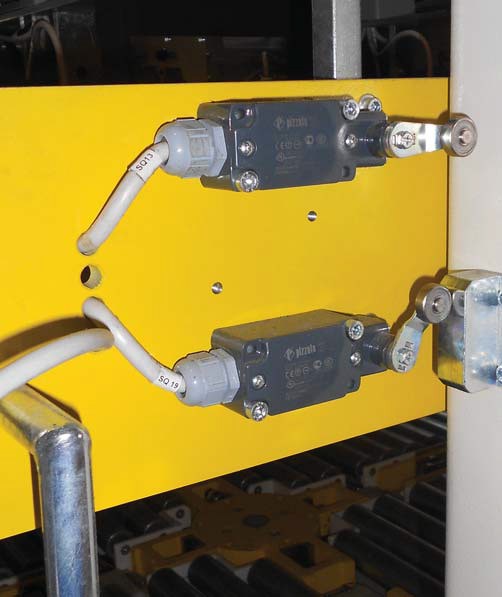
Концевые выключатели (электрический датчик). Это обычный пассивный выключатель, который срабатывает, когда на него надавливает объект (активатор).
Итак, мы выяснили, что воздействие (активация) может быть любым, а реакции может быть две — дискретный либо аналоговый сигнал. Поэтому, все датчики можно считать одинаковыми, различия могут быть только в способе активации (принципе действия) и схеме включения.
Для примера рассмотрим индуктивный датчик, поскольку он наиболее распространен.
Применение индуктивного датчика
Индуктивные датчики приближения применяются широко в промышленной автоматике, чтобы определить положение той или иной части механизма.
Сигнал с выхода датчика может поступать на вход контроллера, преобразователя частоты, реле, контактора или другого исполнительного устройства. Единственное условие — соответствие по току и напряжению.
Принцип работы индуктивного датчика
Индуктивный датчик является дискретным. Сигнал на его выходе появляется, когда в заданной зоне присутствует металл.
В основе работы датчика приближения лежит генератор с катушкой индуктивности. Отсюда и название. Когда в электромагнитном поле катушки появляется металл, это поле резко меняется, что влияет на работу схемы.
Металлический активатор меняет резонансную частоту колебательного контура и схема, содержащая компаратор, выдает сигнал на ключевой транзистор или реле. Нет металла — нет сигнала.
Чем отличаются индуктивные датчики
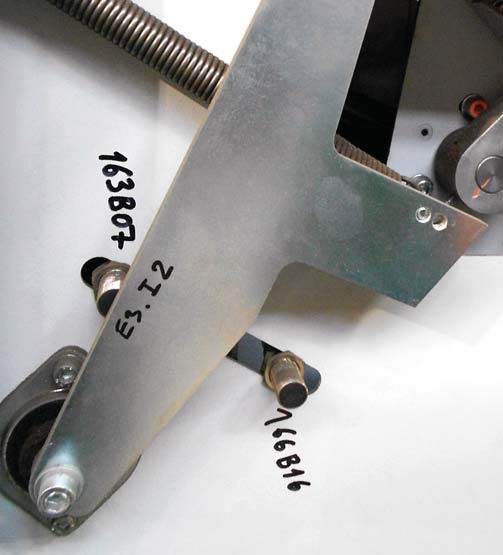
Индуктивные датчики определяют, в левом |
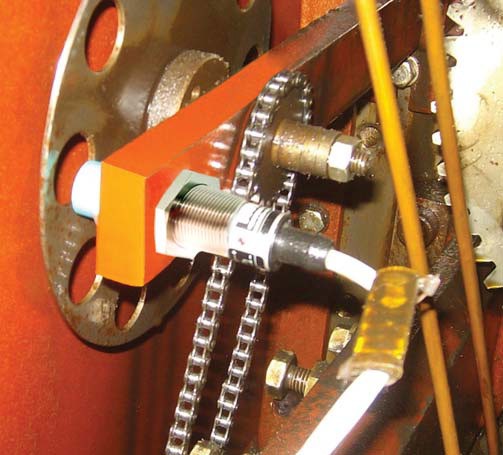
Индуктивный датчик подсчета импульсов |
Почти все, что сказано ниже, относится не только к индуктивным, но и к оптическим, емкостным и другим датчикам.
- Конструкция, вид корпуса.
Тут два основных варианта — цилиндрический и прямоугольный. Другие корпуса применяются крайне редко. Материал корпуса — металл (различные сплавы) или пластик.
- Диаметр цилиндрического датчика.
Основные размеры — 12 и 18 мм. Другие диаметры (4, 8, 22, 30 мм) применяются редко.
- Расстояние переключения (рабочий зазор).
Это то расстояние до металлической пластины, на котором гарантируется надежное срабатывание датчика. Для миниатюрных датчиков это расстояние — до 2 мм, для датчиков диаметром 12 и 18 мм — до 4 и 8 мм, для крупногабаритных датчиков — до 20…30 мм.
- Количество проводов для подключения.
2-х проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки. Нагрузку можно подключать в любой провод, для постоянного напряжения важно соблюдать полярность. Для датчиков, рассчитанных на работу с переменным напряжением — не играет роли ни подключение нагрузки, ни полярность. Главное — обеспечить рабочий ток.
3-х проводные. Наиболее распространены. Есть два провода для питания, и один — для нагрузки. Подробнее расскажу ниже.
4-х и 5-ти проводные. Такое возможно, если используется два выхода на нагрузку (например, PNP и NPN (транзисторные), или переключающие (реле). Пятый провод — выбор режима работы или состояния выхода.
- Виды выходов датчиков по полярности.
У всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента.
Релейный. Реле коммутирует в простейшем случае один из проводов питания, как это делается в бытовых датчиках движения или освещенности. Универсальный вариант с «сухим» контактом, когда выходные контакты реле не связаны с питанием датчика. При этом обеспечивается полная гальваническая развязка, что является основным достоинством такой схемы. То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением.
Транзисторный PNP. На выходе — транзистор PNP, то есть коммутируется «плюсовой» провод. К «минусу» нагрузка подключена постоянно.
Транзисторный NPN. На выходе — транзистор NPN, то есть коммутируется «минусовой», или нулевой провод. К «плюсу» нагрузка подключена постоянно.

Пример оптического датчика с релейным выходом
Можно четко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод питания и коммутируется. Другой полюс подключен к нагрузке постоянно. Ниже будут даны схемы включения датчиков, на которых будет хорошо видно эти отличия.
- Виды датчиков по состоянию выхода.
Какой бы ни был датчик, один из основных его параметров — электрическое состояние выхода в тот момент, когда датчик не активирован (на него не производится какое-либо воздействие).
Выход в этот момент может быть включен (на нагрузку подается питание), либо выключен. Соответственно, говорят — нормально открытый (НО) контакт или нормально закрытый (нормально замкнутый, НЗ) контакт. В иностранном обозначении — NO и NC.
То есть, главное, что надо знать про транзисторные выходы датчиков — то, что их может быть 4 разновидности, в зависимости от полярности выходного транзистора и от исходного состояния выхода: PNP NO, PNP NC, NPN NO, NPN NC.
- Положительная и отрицательная логика работы.
Это понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле). Отрицательная или положительная логика относится к уровню напряжения, который активизирует вход.
Отрицательная логика: вход контроллера активизируется (логическая «1») при подключении к НУЛЮ. Клемму S/S контроллера (общий провод для дискретных входов) при этом необходимо соединить с +24 В. Отрицательная логика используется для датчиков типа NPN.
Положительная логика
В следующей статье мы рассмотрим реальные индуктивные датчики и их схемы включения.
Автор: Александр Ярошенко, автор блога «СамЭлектрик»
принцип работы, выбор — Asutpp
 Фото: индуктивные датчики
Фото: индуктивные датчикиКак известно, автоматизация систем управления технологическими процессами – система многоуровневая. И в зависимости от поставленной задачи в той или иной отрасли, на разных уровнях, для её решения применяются различные специализированные средства. Благо, прогресс это позволяет.
В этой статье поведем речь о таком полезном изобретении промышленности автоматизации, как индуктивные датчики. Что же они собой представляют, где используются и по каким критериям выбираются? Попробуем вместе разобраться с этими вопросами.
Прежде всего, индуктивный датчик – это бесконтактный выключатель, который не содержит подвижных деталей и практически не подвергнутый к воздействию окружающей среды (за частую, степень защиты – IP67).
Основное предназначение – бесконтактный контроль положения предметов, изготовленных из электропроводных или магнитопроводных материалов. Проще говоря, для регистрации металлических объектов. Выпускаются в разнообразных исполнениях, с различными характеристиками, с дискретными и аналоговыми выходами.
На сегодняшний день существует множество задач, связанных с использованием индуктивных датчиков. Широкое применение они нашли в упаковочных машинах, машинах переработки пластмасс, в сборочных линиях и системах транспортеров. При подключении к обычным счетчикам импульсов, получаем простое и одновременно надежное устройство счета. Эта функция так же используется в различных отраслях.
При выборе индуктивного датчика следует обращать внимание на следующие детали:
- Исполнение. Чаще всего имеет цилиндрическую форму с нарезанной резьбой по всей длине датчика. Стандартная линейка классификации по резьбе – М5,М8,М12,М18 и М30. Материал – нержавейка. Крепление осуществляется с помощью двух гаек, которые накручиваются на корпус.
- Расстояние срабатывания. Напрямую зависит от характеристик встроенного генератора, на который влияют вихревые токи «измеряемого» предмета. Диапазон варьируется от 1мм….до25-30мм, в зависимости от производителя.
- Тип выхода. Прежде всего классифицируются на аналоговый (1-10В,4-20mA) и дискретный. Дискретный в свою очередь, отталкиваясь от типа транзисторного выхода вторичного прибора, разнится на PNP-тип и NPN-тип . Так же немаловажно определиться, будет ли это нормально открытый выходной элемент (NO) или же нормально закрытый (NC).
- Напряжение питания. Постоянный ток – 10….30VDC; Переменный ток – 20….265VAC.
- Монтаж. Можно выделить два основных типа: скрытый и выступающий.
- Электрическое подсоединение. Обычно используется двухпроводный или трехпроводный кабель, но имеет место и коннекторное подключение.
Что ж, подводя итог, стоит еще отметить тот факт, что индуктивные датчики очень удобные в эксплуатации, не занимают много времени при инсталляции и монтаже, а так же вполне доступны по своей ценовой категории. Помните, правильный выбор маленькой детали – залог безотказной работы всего механизма.
Принцип действия и основные параметры индуктивных датчиков положения | RuAut
Самым распространенным типом устройств в составе существующих АСУ ТП являются индуктивные датчики положения, их количество превышает 90% от всех применяемых дискретных датчиков положения. Любой технологический процесс в практически любой отрасли промышленности (пищевая, машиностроение, нефтегазовая, энергетика) требует отслеживать положение заслонок, приводов, клапанов, деталей и заготовок, подвижных элементов конструкций агрегатов и т.д. в автоматическом режиме.
Повсеместному распространению индуктивных датчиков послужили их надежность, отличные эксплуатационные характеристики и сравнительно низкая стоимость. Основными рабочими характеристиками индуктивных датчиков положения являются: диапазон срабатывания, степень защиты, рабочая температура и частота отклика.
Принцип действия индуктивных датчиков
Параметры индуктивных датчиков положения и рекомендации по их применению
Чтобы правильно подобрать индуктивный датчик под определенную задачу необходимо знать ряд основных параметров, а также за какие функции эти параметры отвечают.
Наверное, главным параметром, указанным в паспорте на датчик является номинальный диапазон срабатывания. Он обозначается как Sn. Номинальный диапазон срабатывания, хотя и является основным параметром, но практического значения особо не имеет. Так как его значение получается при ряде ограничений связанных с внешними факторами, а именно: температура окружающей среды 20 градусов Цельсия, питающее напряжение 24 В постоянного или же 230 В переменного тока. А в качестве объекта должна использоваться стальная пластина, выполненная из определенной стали, квадратной формы с шириной в 3 раза больше ширины значения Sn и толщиной 1мм. Практическое же значение имеют такие параметры, как эффективный диапазон срабатывания Sr и полезный диапазон срабатывания Su. Значение Sr варьируется в пределах плюс минус 10% от номинального диапазона срабатывания, а измеряется в температурном диапазоне от 18 до 28 градусов Цельсия и при номинальном напряжении питания. Полезный диапазон срабатывания индуктивного датчика варьируется в пределах плюс минус 10% от эффективного и измеряется при напряжении питания равного 85% — 110% от номинального и температуре от -25 до +70 градусов Цельсия. Часто в техническом описании на датчик можно встретить такой параметр, как гарантированная зона (диапазон) срабатывания. Его нижняя граница равна 0, а верхняя значению 0.81Sn. Также важными параметрами индуктивных датчиков положения, влияющими на точность и достоверность измерений, являются гистерезис и повторяемость H и R соответственно. Гистерезисом называют расстояние между самыми дальними точками срабатывания датчика на объект при приближении и удалении последнего. Нормальным считается значение гистерезиса равное 0.2Sr.
Помимо свойств присущих непосредственно самому индуктивному датчику положения на диапазон срабатывания влияют свойства материала объекта, речь идет об электропроводимости и магнитной проницаемости. Для этого было введено понятие коэффициента редукции. Эталонным материалом считается Сталь 37, ее коэффициент редукции равен 1. Для других металлов коэффициент редукции имеет значение меньше 1. Например, нержавейка имеет коэффициент редукции 0.85, а медь всего лишь 0.3. То есть, если объектом срабатывания является медь, то диапазон срабатывания уменьшается до значения равного 0.3Sn .
Далее описываются другие, но не менее важные параметры индуктивных датчиков положения.
Напряжение питания датчика
Питание индуктивных датчиков может осуществляться как от источников постоянного тока, так и источников переменного тока. Для постоянного тока характерны диапазоны напряжений: 10-30В, 10-60В и 5-60В. Для переменного тока характерен диапазон: 98-253В. Также существуют индуктивные датчики имеющие универсальное питание, такие датчики можно запитать как от источника постоянного, так и от источника переменного тока.
Номинальный ток нагрузки
Параметр показывает, на какое значение тока рассчитан датчик при действии нагрузки продолжительный интервал времени. Стандартным является значение равное 200мА, но бывают спец исполнения датчиков рассчитанные и на 500мА.
Частота отклика
Параметр показывает, с какой максимальной частотой, выраженной в герцах, датчик может осуществлять переключения. Для большинства промышленных применений хватает частоты отклика равной 1000Гц, а вот поднимать частоту выше 5кГц производителям датчиков нет особого смысла, так как такая частота будет выше, частоты выполнения стандартного цикла промышленного контроллера (ПЛК). Тем самым состояние такого датчика может быть неверно интерпретировано модулем ввода ПЛК.
При выборе датчиков также стоит обратить на степень защиты корпуса от брызг и пыли, и диапазон температуры при котором может работать индуктивный датчик. Стандартными являются степень защиты IP67, а температурный диапазон от минус 25 до плюс 70 градусов Цельсия.Индуктивные датчики положения (приближения) – Территория Автоматизации
Расстояние срабатывания и объект воздействия
В технических параметрах индуктивных бесконтактных датчиков указываются их номинальные (условные) расстояния срабатывания Sn. Они не учитывают допуски при изготовлении датчиков или отклонения, обусловленные внешними факторами (напряжение питания и температура), и могут отличаться от реальных расстояний срабатывания Sr.
При определении реальных расстояний срабатывания Sr используется стандартный объект воздействия из металла (квадратная пластина из Ст 3 толщиной 1 мм, со стороной, равной 3Sn или диаметру чувствительной поверхности). При работе с объектами из других металлов и сплавов, а также если объект воздействия имеет размеры меньше стандартного, расстояния срабатывания могут уменьшаться (при расчетах необходимо применять поправочные коэффициенты K).
Для предварительных расчетов можно использовать следующие поправочные коэффициенты материала объекта воздействия:
- нержавеющая сталь: K=0,8
- нихром: K=0,9
- латунь: K=0,5
- алюминий: K=0,5
- медь: K=0,48
Выделяются также группы датчиков с поправочным коэффициентом K=1 (расстояние срабатывания не зависит от типа используемого металла) и с поправочным коэффициентом K=0 (срабатывание только на железо).
Обычно на практике объект воздействия изготавливается в виде стальной пластины требуемых размеров, соединенной с движущейся деталью механизма, положение которой нужно контролировать.
Для надежного и однозначного переключения индуктивного датчика его расстояние срабатывания и расстояние отпускания при обратном ходе объекта делаются разными (разность расстояний определяется параметром «дифференциальный ход»).
3.5. Индуктивные датчики
Принцип действия индуктивных датчиков основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником вследствие изменения магнитного сопротивления Rmмагнитной цепи датчика, в которую входит сердечник.
Индуктивные датчики относятся к классу параметрических. Измеряемое перемещение на входе датчика вызывает изменение параметров магнитной и электрической цепей, что, в свою очередь, вызывает изменение выходной величины — электрического тока I или напряжения U.
С помощью индуктивных датчиков можно контролировать механические перемещения, силы, температуру, свойства магнитных материалов, определять наличие дефектов, контролировать диаметр стальной проволоки, толщину немагнитных покрытий на стали и др.
Индуктивные датчики отличает ряд достоинств: простота и прочность конструкции, надежность в работе, отсутствие скользящих контактов, большая величина мощности на выходе (до нескольких десятков ватт), высокая чувствительность (до 100 В/мм).
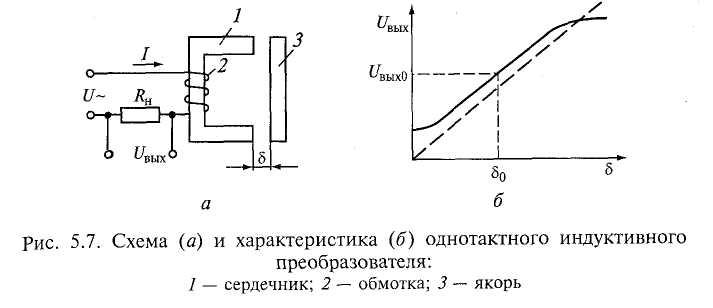
Рисунок 3.7 Схема (а) и характеристика (б) индуктивного преобразователя:
1- сердечник; 2- обмотка; 3- якорь.
К достоинствам рассмотренных индуктивных трансформаторных датчиков следует отнести:
достаточно высокую выходную мощность, позволяющую во многих случаях обойтись без усилительных устройств;
высокие чувствительность и разрешающую способность;
сравнительную простоту конструкции; высокую надежность;
малые массу и размеры при расчете на напряжение повышенной частоты;
невысокую стоимость.
Недостатками рассмотренных измерительных преобразователей являются:
трудность регулировки и компенсации начального напряжения на их выходе;
необходимость экранирования для уменьшения уровня помех, что обусловливает увеличение размеров и массы;
возможность работы только на переменном токе;
ограниченность диапазона линейной статической характеристики.
3.6. Емкостные датчики
П ринцип
действия емкостных измерительных
преобразователей основан на изменении
емкости конденсатора под воздействием
входной преобразуемой величины. Емкость
конденсатора:
ринцип
действия емкостных измерительных
преобразователей основан на изменении
емкости конденсатора под воздействием
входной преобразуемой величины. Емкость
конденсатора:
где ε — относительная диэлектрическая проницаемость диэлектрика;
ε0 — диэлектрическая проницаемость вакуума;
S — площадь пластины;
δ — толщина диэлектрика или расстояние между пластинами.
Емкостные преобразователи используют для измерения угловых и линейных перемещений, линейных размеров, уровня, усилий, влажности, концентрации и др. Конструктивно они могут быть выполнены с плоскопараллельными, цилиндрическими, штыревыми электродами, с диэлектриком между пластинами и без него.
Е мкостный
плоскопараллельный измерительный
преобразователь с изменяемой площадью
перекрытияS
(cм.
рис. 3.8, а)
описывается
уравнением преобразования:
мкостный
плоскопараллельный измерительный
преобразователь с изменяемой площадью
перекрытияS
(cм.
рис. 3.8, а)
описывается
уравнением преобразования:
где а — ширина пластин конденсатора;
X — длина перекрытия электродов.
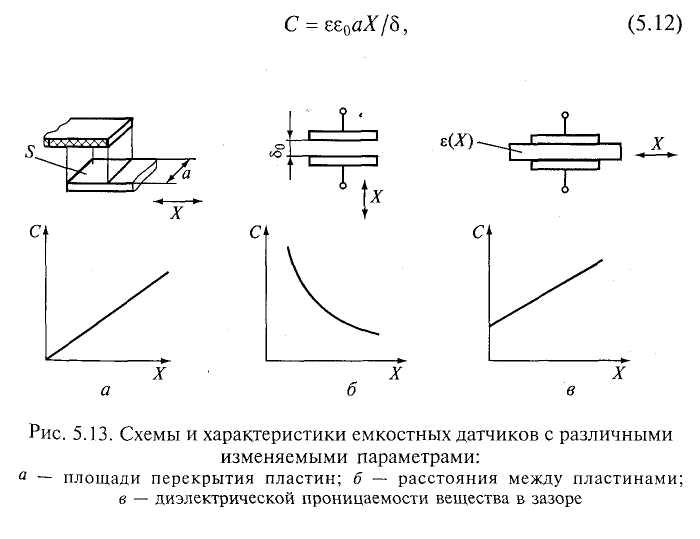
а) б) в)
Рисунок 3.8 Схемы емкостных датчиков с различными измеряемыми параметрами.

Рисунок 3.9 Емкостной датчик для измерения угловых велечин
Емкостные преобразователи перемещения с переменной площадью перекрытия (рис. 3.9) используют и для измерения угловых величин. В этом случае емкость измерительного преобразователя:
(3.2)
а чувствительность:
(3.3)
где r2, r1 — соответственно наружный и внутренний радиусы пластин;
φ, φ0 — соответственно текущий (измеряемый) и начальный углы перекрытия пластин.
Е мкостный
плоскопараллельный преобразователь
перемещения с изменяющимся воздушным
зазором(см.
рис. 3.8, б) имеет
нелинейную характеристику. Изменение
его емкости описывается уравнением:
мкостный
плоскопараллельный преобразователь
перемещения с изменяющимся воздушным
зазором(см.
рис. 3.8, б) имеет
нелинейную характеристику. Изменение
его емкости описывается уравнением:
где δ0 — начальный зазор;
X — перемещение пластины.
В связи с нелинейностью статической характеристики такие датчики применяют для измерения относительно малых перемещений, обычно не более 0,1δ0.
Преобразователи с изменяемой диэлектрической проницаемостью среды ε между электродами (см. рис. 3.8, в) широко используют для измерения уровня жидких и сыпучих веществ, анализа состава и концентрации веществ в химической, нефтеперерабатывающей и других областях промышленности, для счета изделий, охранной сигнализации и т.п. Они имеют линейную статическую характеристику.
Емкость измерительных преобразователей в зависимости от конструктивных особенностей колеблется от десятых долей до нескольких тысяч пикофарад, что приводит к необходимости использовать для питания датчиков напряжение повышенной частоты — от 1•103 до 108 Гц. Это один из существенных недостатков подобных преобразователей.
К достоинствам емкостных измерительных преобразователей можно отнести простоту конструкции, малые размеры и массу, высокую чувствительность, большую разрешающую способность при малом уровне входного сигнала, отсутствие подвижных токосъемных контактов, высокое быстродействие, возможность получения необходимого закона преобразования за счет выбора соответствующих конструктивных параметров, отсутствие влияния выходной цепи на измерительную.
Недостатки емкостных измерительных преобразователей состоят в относительно низком уровне выходной мощности сигналов, нестабильности характеристик при изменении параметров окружающей среды, влиянии паразитных емкостей.
6. Индукционные датчики
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Они относятся к датчикам генераторного типа. Принцип действия индукционных датчиков основан на законе электромагнитной индукции. Выходным сигналом индукционных датчиков является ЭДС, которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки. Это изменение происходит за счет перемещения катушки в постоянном магнитном поле или за счет вращения ферромагнитного индуктора относительно неподвижной катушки.
Основным отличием индукционных датчиков от индуктивных является то, что в них используется постоянное магнитное поле, а не переменное (питание индуктивных датчиков осуществляется от сети переменного тока). Постоянное магнитное поле в индукционных датчиках создается двумя способами: постоянными магнитами или катушкой, обтекаемой постоянным током.
На
рис. 19, а показана
схема датчика с обмоткой w2,
размещенной в воздушном зазоре, в котором
постоянный магнитный поток Ф создается катушкой w1,
включенной на постоянное напряжение U=.
При перемещении катушки в магнитном
поле в ней индуцируется ЭДС, пропорциональная
скорости перемещения:  ,
гдеk —
коэффициент пропорциональности,
зависящий от числа витков
,
гдеk —
коэффициент пропорциональности,
зависящий от числа витков и
конструктивных параметров датчика.
и
конструктивных параметров датчика.

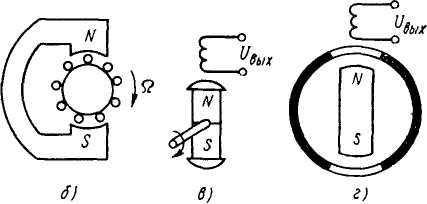
Рис. 19. Схемы индукционных датчиков
На рис. 19, б показан датчик, в котором постоянный магнитный поток создается с помощью постоянного магнита с полюсными наконечниками. ЭДС, индуцируемая во вращающейся катушке, пропорциональна скорости вращения Ω:

В обоих этих датчиках катушки подвижны, поэтому для отвода от них выходного сигнала (ЭДС) необходимы гибкие токоподводы или контактные кольца со щетками.
Индукционный датчик может быть выполнен и другой конструкции: с неподвижной катушкой и вращающимся постоянным магнитом (рис. 19, в). Надежность при этом повышается за счет отсутствия скользящего контакта.
Возможен и другой способ повышения надежности датчика по схеме рис. 19, б: и катушка, и постоянный магнит неподвижны, а в зазоре между ними вращается ферромагнитное кольцо с вырезами (рис. 19, г) или иной элемент, имеющий существенно разную магнитную проводимость по взаимно перпендикулярным осям. При вращении изменяется поток, пронизывающий плоскость катушки.
В датчиках (рис. 19, б, в, г) в качестве выходного сигнала можно использовать частоту ЭДС. Принцип их действия по существу такой же, как у синхронных генераторов. Для измерения частоты вращения используются и специальные электрические машины малой мощности — тахогенераторы.
Тахогенератор
постоянного тока (рис. 20, а) имеет
обмотку возбуждения, создающую при
питании постоянным током магнитный
поток Ф.
При вращении якоря в нем создается ЭДС,
пропорциональная частоте вращения п:  ,
где k —
постоянная, определяемая конструкцией.
,
где k —
постоянная, определяемая конструкцией.

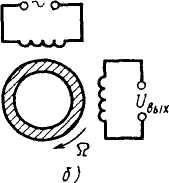 Рис.
20. Тахогенераторы
Рис.
20. Тахогенераторы
Напомним, что частота вращения п обычно выражается в 1/мин (количество оборотов в минуту) и связана со скоростью вращения Ω выражением
 или
или
С помощью коллектора и щеток выходной сигнал подается на нагрузку в виде выпрямленного напряжения.
Тахогенератор переменного тока (рис. 20, б) имеет на статоре две обмотки, сдвинутые одна относительно другой на 90 эл. град. Одна обмотка включается в сеть переменного тока. При вращении ротора, выполненного в виде тонкостенного электропроводящего цилиндра, в другой обмотке наводится переменная ЭДС, которая пропорциональна частоте вращения п. Для повышения температурной стабильности в качестве материала полого ротора используется константан.
Тахогенераторы обладают высокой чувствительностью и мощностью выходного сигнала. Общим недостатком всех генераторных датчиков является зависимость выходного сигнала от сопротивления нагрузки.
ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ