


принцип действия. Двигатель постоянного тока: устройство
Первой из всех изобретенных в 19 веке вращающихся электромашин является двигатель постоянного тока. Принцип действия его известен с середины прошлого столетия, и до настоящего времени двигатели постоянного тока (ДПТ) продолжают верно служить человеку, приводя в движение множество полезных машин и механизмов.
Первые ДПТ
Начиная с 30-х годов 19 века в своем развитии они прошли несколько этапов. Дело в том, что до появления в конце позапрошлого века машинных генераторов переменного тока единственным источником электроэнергии был гальванический элемент. Поэтому все первые электродвигатели могли работать только на постоянном токе.
Каким же был первый двигатель постоянного тока? Принцип действия и устройство двигателей, строившихся в первой половине 19 века, являлся следующим. Явнополюсный индуктор представлял собой набор неподвижных постоянных магнитов или стержневых электромагнитов, не имевших общего замкнутого магнитопровода. Явнополюсный якорь образовывали несколько отдельных стержневых электромагнитов на общей оси, приводимых во вращение силами отталкивания и притяжения к полюсам индуктора. Типичными их представителями являлись двигатели У. Риччи (1833) и Б. Якоби (1834), оснащенные механическими коммутаторами тока в электромагнитах якорях с подвижными контактами в цепи обмотки якоря.

Как работал двигатель Якоби
Каков же был у этой машины принцип действия? Двигатель постоянного тока Якоби и его аналоги обладали пульсирующим электромагнитным моментом. В течение времени сближения разноименных полюсов якоря и индуктора под действием магнитной силы притяжения момент двигателя быстро достигал максимума. Затем, при расположении полюсов якоря напротив полюсов индуктора, механический коммутатор прерывал ток в электромагнитах якоря. Момент падал до нуля. За счет инерции якоря и приводимого в движение механизма полюсы якоря выходили из-под полюсов индуктора, в этот момент в них от коммутатора подавался ток противоположного направления, их полярность также менялась на противоположную, а сила притяжения к ближайшему полюсу индуктора сменялась на силу отталкивания. Таким образом, двигатель Якоби вращался последовательными толчками.
Появляется кольцевой якорь
В стержневых электромагнитах якоря двигателя Якоби ток периодически выключался, создаваемое ими магнитное поле исчезало, а его энергия преобразовывалась в тепловые потери в обмотках. Таким образом, электромеханическое преобразование электроэнергии источника тока якоря (гальванического элемента) в механическую происходило в нем с перерывами. Нужен был двигатель с непрерывной замкнутой обмоткой, ток в которой протекал бы постоянно в течение всего времени его работы.
И такой fuhtufn был создан в 1860 году А. Пачинотти. Чем же отличался от предшественников его двигатель постоянного тока? Принцип действия и устройство двигателя Пачинотти следующие. В качестве якоря он использовал стальное кольцо со спицами, закрепленное на вертикальном валу. При этом якорь не имел явно выраженных полюсов. Он стал неявнополюсным.
Между спицами кольца были намотаны катушки обмотки якоря, концы которых соединялись последовательно на самом якоре, а от точек соединения каждых двух катушек были сделаны отпайки, присоединенные к пластинам коллектора, расположенным вдоль окружности внизу вала двигателя, число которых равнялось числу катушек. Вся обмотка якоря была замкнута сама на себя, а последовательные точки соединения ее катушек присоединялись к соседним пластинам коллектора, по которым скользила пара токоподводящих роликов.
Кольцевой якорь был помещен между полюсами двух неподвижных электромагнитов индуктора-статора, так что силовые линии создаваемого ими магнитного поля возбуждения входили в наружную цилиндрическую поверхность якоря двигателя под северным полюсом возбуждения, проходили по кольцевому якорю, не перемещаясь во внутреннее его отверстие, и выходили наружу под южным полюсом.

Как работал двигатель Пачинотти
Какой же у него был принцип действия? Двигатель постоянного тока Пачинотти работал точно так же, как и современные ДПТ.
В магнитном поле полюса индуктора с данной полярностью всегда находилось определенное число проводников обмотки якоря с током неизменного направления, причем направление тока якоря под разными полюсами индуктора было противоположным. Это достигалось размещением токоподводящих роликов, играющих роль щеток, в пространстве между полюсами индуктора. Поэтому мгновенный ток якоря втекал в обмотку через ролик, пластину коллектора и присоединенную к ней отпайку, которая также находилась в пространстве между полюсами, далее протекал в противоположных направлениях по двум полуобмоткам-ветвям, и наконец вытекал через отпайку, пластину коллектора и ролик в другом межполюсном промежутке. При этом сами катушки якоря под полюсами индуктора менялись, но направление тока в них оставалось неизменным.
По закону Ампера, на каждый проводник катушки якоря с током, находящийся в магнитном поле полюса индуктора, действовала сила, направление которой определяется по известному правилу «левой руки». Относительно оси двигателя эта сила создавала вращающий момент, а сумма моментов от всех таких сил дает суммарный момент ДПТ, который уже при нескольких пластинах коллектора является почти постоянным.
ДПТ с кольцевым якорем и граммовской обмоткой
Как это часто случалось в истории науки и техники, изобретение А. Пачинотти не нашло применения. Оно было на 10 лет забыто, пока в 1870 году его независимо не повторил франко-немецкий изобретатель З. Грамм в аналогичной конструкции генератора постоянного тока. В этих машинах ось вращения уже была горизонтальной, использовались угольные щетки, скользящие по пластинам коллектора почти современной конструкции. К 70-м годам 19 века принцип обратимости электромашин стал уже хорошо известен, а машина Грамма использовалась как генератор и двигатель постоянного тока. Принцип действия его уже описан выше.
Несмотря на то, что изобретение кольцевого якоря было важным шагом в развитии ДПТ, его обмотка (названная граммовской) имела существенный недостаток. В магнитном поле полюсов индуктора находились только те ее проводники (называемые активными), которые лежали под этими полюсами на наружной цилиндрической поверхности якоря. Именно к ним были приложены магнитные силы Ампера, создающие вращающий момент относительно оси двигателя. Те же неактивные проводники, что проходили через отверстие кольцевого якоря, не участвовали в создании момента. Они только бесполезно рассеивали электроэнергию в виде тепловых потерь.

От кольцевого якоря к барабанному
Устранить этот недостаток кольцевого якоря удалось в 1873 году известному немецкому электротехнику Ф. Гефнер-Альтенеку. Как же функционировал его двигатель постоянного тока? Принцип действия, устройство его индуктора-статора такие же, как у двигателя с кольцевой обмоткой. А вот конструкция якоря и его обмотка изменились.
Гефнер-Альтенек обратил внимание, что направление тока якоря, вытекающего из неподвижных щеток, в проводниках граммовской обмотки под соседними полюсами возбуждения всегда противоположно, т.е. их можно включить в состав витков расположенной на наружной цилиндрической поверхности катушки с шириной (шагом), равным полюсному делению (части окружности якоря, приходящейся на один полюс возбуждения).
В этом случае становится ненужным отверстие в кольцевом якоря, и он превращается в сплошной цилиндр (барабан). Такая обмотка и сам якорь получили наименование барабанных. Расход меди в ней при одинаковом числе активных проводников гораздо меньше, чем в граммовской обмотке.

Якорь становится зубчатым
В машинах Грамма и Гефнер-Альтенека поверхность якоря была гладкой, а проводники его обмотки располагались в зазоре между ним и полюсами индуктора. При этом расстояние между вогнутой цилиндрической поверхностью полюса возбуждения и выпуклой поверхностью якоря достигало нескольких миллиметров. Поэтому для создания нужной величины магнитного поля требовалось применять катушки возбуждения с большой магнитодвижущей силой (с большим числом витков). Это существенно увеличивало габариты и вес двигателей. Кроме того, на гладкой поверхности якоря его катушки было трудно крепить. Но как же быть? Ведь для действия на проводник с током силы Ампера он должен находиться в точках пространства с большой величиной магнитного поля (с большой магнитной индукцией).
Оказалось, что это не является необходимым. Американский изобретатель пулемета Х. Максим показал, что если выполнить барабанный якорь зубчатым, а в образовавшиеся между зубцами пазы поместить катушки барабанной обмотки, то зазор между ним и полюсами возбуждения можно уменьшить до долей миллиметра. Это позволило существенно уменьшить размеры катушек возбуждения, но вращающий момент ДПТ нисколько не уменьшился.
Как же функционирует такой двигатель постоянного тока? Принцип действия основан на том обстоятельстве, что при зубчатом якоре магнитная сила приложена не к проводникам в его пазах (магнитное поле в них практически отсутствует), а к самим зубцам. При этом наличие тока в проводнике в пазу имеет решающее значение для возникновения этой силы.
Как избавились от вихревых токов
Еще одно важнейшее усовершенствование внес знаменитый изобретатель Т. Эдиссон. Что же добавил он в двигатель постоянного тока? Принцип действия остался неизменным, а вот материал, из которого сделан его якорь, изменился. Вместо прежнего массивного он стал шихтованным из тонких электрически изолированных друг от друга стальных листов. Это позволило уменьшить величину вихревых токов (токов Фуко) в якоре, что увеличило КПД двигателя.

Принцип действия двигателя постоянного тока
Кратко его можно сформулировать так: при подключении обмотки якоря возбужденного двигателя к источнику питания в ней возникает большой ток, называемый пусковым и превышающий в несколько раз его номинальное значение. Причем под полюсами возбуждения противоположной полярности направление токов в проводниках обмотки якоря так же противоположно, как показано на рисунке ниже. Согласно правилу «левой руки», на эти проводники действуют силы Ампера, направленные против часовой стрелки и увлекающие якорь во вращение. При этом в проводниках обмотки якоря наводится электродвижущая сила (противо-ЭДС), направленная встречно напряжению источника питания. По мере разгона якоря растет и противо-ЭДС в его обмотке. Соответственно, ток якоря уменьшается от пускового до величины, соответствующей рабочей точке на характеристике двигателя.

Чтобы повысить скорость вращения якоря, нужно либо увеличить ток в его обмотке, либо снизить противо-ЭДС в ней. Последнего можно добиться, уменьшив величину магнитного поля возбуждения путем снижения тока в обмотке возбуждения. Данный способ управления скоростью ДПТ получил широкое распространение.
Принцип действия двигателя постоянного тока с независимым возбуждением
С присоединением выводов обмотки возбуждения (ОВ) к отдельному источнику электропитания (независимая ОВ) обычно выполняются мощные ДПТ, чтобы было более удобно регулировать величину тока возбуждения (с целью изменения скорости вращения). По своим свойствам ДПТ с независимой ОВ практически аналогичны ДПТ с ОВ, параллельно подключаемой к обмотке якоря.
Параллельное возбуждение ДПТ
Принцип действия двигателя постоянного тока параллельного возбуждения определяется его механической характеристикой, т.е. зависимостью скорости вращения от нагрузочного момента на его валу. Для такого двигателя изменение скорости при переходе от холостого вращения к номинальному моменту нагрузки составляет от 2 до 10%. Такие механические характеристики называются жесткими.

Таким образом, принцип действия двигателя постоянного тока с параллельным возбуждением обуславливает его применение в приводах с постоянной скоростью вращения при большом диапазоне изменения нагрузки. Однако он широко используется и в регулируемом электроприводе с переменной скоростью вращения. При этом для регулирования его скорости может применяться изменение как тока якоря, так и тока возбуждения.
Последовательное возбуждение ДПТ
Принцип действия двигателя постоянного тока последовательного возбуждения, как и параллельного, определяется его механической характеристикой, которая в этом случае является мягкой, т.к. частота вращения двигателя значительно варьируется при изменениях нагрузки. Где же выгоднее всего применять такой двигатель постоянного тока? Принцип действия жд тягового двигателя, скорость которого должна уменьшаться при преодолении составом подъемов и возвращаться к номинальной при движении по равнине, полностью соответствует характеристикам ДПТ с ОВ, последовательно соединенной с обмоткой якоря. Поэтому значительная часть электровозов во всем мире оснащена такими устройствами.
Принцип действия двигателя постоянного тока с последовательным возбуждением реализуют также тяговые двигатели пульсирующего тока, которые представляют собой, по сути, те же ДПТ с последовательной ОВ, но специально сконструированные для работы с выпрямленным уже на борту электровоза током, имеющим значительные пульсации.
Устройство и принцип действия ДПТ
Исследование двигателя постоянного тока независимого возбуждения
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.
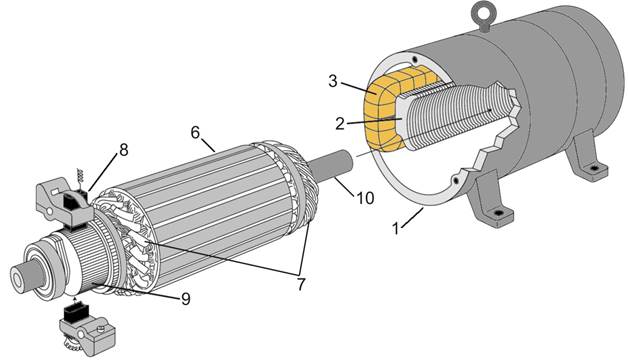
Рис. 1. Внешний вид двигателя постоянного тока
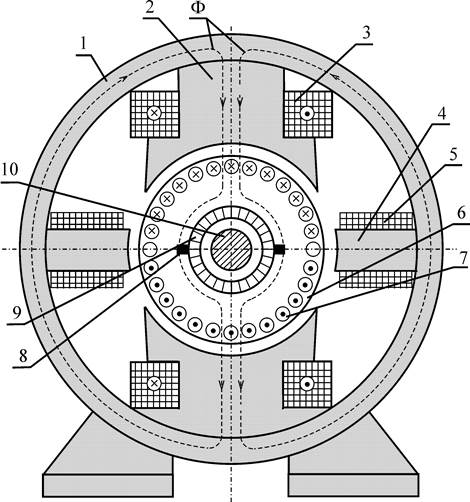
Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями  и
и  . Как правило,
. Как правило,  . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
. В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением  . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
. Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
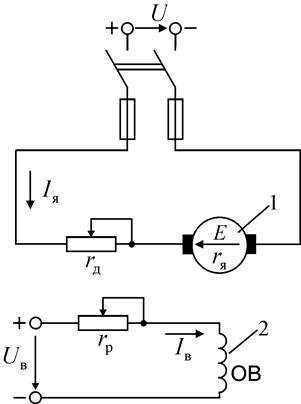
Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
 , (1)
, (1)
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
 (2)
(2)
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
 (3)
(3)
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов  и
и  скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока
скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока  и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря  , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
, как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
 (4)
(4)
Значение сопротивления  относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя
относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя  . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
. Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
Дата добавления: 2016-06-29; просмотров: 7748;
Похожие статьи:
Привод электродвигателя постоянного тока
Общее понятие
Приводы постоянного тока служат для управления двигателями постоянного тока. Правда не везде, а лишь там, где требуется плавное и точное регулирование скорости и вращающего момента электромотора в достаточно широких пределах.
Где же конкретно могут использоваться приводы постоянного тока? Для того, чтобы ответить на данный вопрос, нам надо вначале сказать несколько слов о принципе работы двигателя постоянного тока.
Вообще надо заметить, что электродвигатели — очень распространенный объект управления в различных устройствах и технических системах. Причем настолько, что без них вся наша современная жизнь очевидно вовсе не была бы такой уж и современной. Точнее мы бы так и не ушли далее технологий начала 19 века. И не имели бы не только компьютеров, с их гаджетами, но и вообще не знали бы, например, даже столь привычного нам электрического освещения, поскольку сами электрогенераторы – это, по сути, те же самые электродвигатели, но только преобразующие различные виды неэлектрической энергии (механическая, химическая или тепловая) в электрическую энергию.
Сами электродвигатели при этом, как известно, делятся на электродвигатели постоянного тока и электродвигатели переменного тока. Причем сегодня в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, именно последние приобретают все большую популярность в промышленности.
Однако, нельзя не сказать, что и двигатели постоянного тока рано еще списывать со счетов. Они имеют свои весьма важные и существенные преимущества. Дело в том, что один из «глобальных» минусов двигателя постоянного тока – это коллектор, его низкая механическая прочность, а также слабая механическая прочность щеток.
Но зато у двигателя постоянного тока можно менять скорости в достаточно широком диапазоне при относительном постоянстве момента на валу. При этом количество оборотов двигателя постоянного тока пропорционально величине напряжения, которое подается на якорную обмотку. А это значит, что в диапазоне скоростей от нуля до номинального значения электродвигатель может развивать полный крутящий момент. Именно поэтому двигатель постоянного тока широко используют в тех случаях, когда необходимо обеспечить большой момент при низких скоростях электродвигателя почти до его остановки при наличии полной нагрузки с последующим стартом. К таковым областям относятся электроприводы лифтов, кранов, ленточных конвейеров, смесителей, экструдеров и топу подобных механизмов.
Принцип действия двигателя постоянного тока
Вообще надо заметить, что самой первой из всех изобретенных в XIX веке вращающихся электромашин был именно электродвигатель постоянного тока. Сам принцип действия его известен с середины прошлого столетия и основан на том, что крутящий момент здесь создаётся путём взаимодействия между двумя магнитными полями — полем обмотки возбуждения и полем, создающимся обмотками во вращающемся якоре.
Впрочем, в некоторых моделях двигателей постоянного тока нет обмотки возбуждения, вместо нее установлены постоянные магниты, сохраняющее стационарное магнитное поле при любых рабочих условиях.
Принцип работы двигателя постоянного тока заключается в том, что ток, проходя через якорь, создаёт магнитное поле, которое пытается выровняться со стационарным полем. Происходит вращение двигателя/
Рис. 1. Схема двигателя постоянного тока
При этом коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания в этом случае происходит через угольные щетки. Поскольку здесь постоянно имеет место механическое трение, то эти щетки изнашиваются через определенное время (как и сам коллектор) и соответственно требуют своей периодической замены.
Впрочем, следует заметить, что большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху.
В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
- Крутящий момент. Он прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря. Так же момент прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
- Скорость. Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов). Это значит, что скорость прямо пропорциональна напряжению якоря, а также обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).
Управление двигателем постоянного тока
Последнее же означает, что, меняя тока обмотки, можно изменять соотношение между скоростью и моментом. Однако этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока также необходимо управлять напряжением и током якоря. Для этой цели можно было бы использовать переменные резисторы, но этот метод не используется в настоящее время, так как приводит к потере мощности. Лучшим решением здесь будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.
Рис.2. Схема управления скоростью и моментом ДПТ
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры (управляемая схема Ларионова). Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел.
Рис.3. Схема управляемого выпрямителя
Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Отсюда следует, что привод постоянного тока просто регулирующий подводимую мощность к двигателю был бы трудно регулируемым и не применим в большинстве задач. Для управления двигателем необходимо управлять скоростью. Поэтому на двигателях постоянного тока устанавливают тахогенераторы, механически соединённые с валом двигателя.
Тахогенератор представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала, обычно с выходом 0-10В постоянного тока, реже 0-220В переменного тока. По его показаниям регулируемый привод постоянного тока регулирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея датчик обратной связи для регулирования скорости, привод постоянного тока точно регулирует скорость вращения двигателем.
Рис. 4. Схема управления двигателем постоянного тока
Менять ли привод постоянного тока?
Следует заметить, что в силу длительного периода широкого применения двигателей постоянного тока, на протяжении довольно долгого времени для регулировки скорости вала двигателя использовались приводы постоянного тока. Тем самым, данные приводы имели широкое распространение и были установлены на огромном количестве различных машин, механизмов и оборудовании. Но вот в чем проблема – дело в том, что раньше приводы постоянного тока выпускались с управлением на аналоговых микросхемах. А это вело к длительной настройке оборудования, необходимости постоянного обслуживания привода и частой его перенастройки. В результате против двигателей постоянного тока и соответственно приводов постоянного тока сложилось предубеждение о ненужности и даже вредности установки таких систем. Повсеместно обозначилась тенденция к замене «постоянников» на «переменники». И где-то это и правда оказалось оправдано, но…
Увы, но часто «дьявол кроется в деталях»!
Следует заметить, что сейчас приводы постоянного тока выпускаются с фазными схемами управления, основанными на современных микропроцессорах. А это значит, что они стали значительно более надежны и, ГЛАВНОЕ, не нуждаются в необходимости постоянного обслуживания привода и частой перенастройки приводов. А поскольку вопреки публикациям в СМИ и доводам производителей приводов переменного тока, существует еще немало таких применений, где приводы постоянного тока являются предпочтительными по своему функционалу (а в конечном счете и по деньгам), то возможно при модернизации оборудования следует обратить внимание на приводы постоянного тока.
Более того, сегодня необходимо учитывать, что очень часто, при модернизации систем управления, простая замена устаревших приводов постоянного тока новыми современными приводами постоянного тока, является экономически более выгодной!
Подумайте! Возможно это Ваш случай? Причем в данном случае имеет смысл обратить именно на лидеров по производству приводов постоянного тока, одним из которых является фирма Siemens, выпускающая приводы постоянного тока серии SINAMICS DCM — современный мощный привод постоянного тока со многими дополнительными модулями расширения, интеграции в промышленные сети и встроенными функциями для решения типовых технологических задач (намотка-размотка и т. д.).
Обращайтесь к нам, и мы поможем Вам приобрести немецкое качество по разумным ценам!
Настройка, монтаж и обслуживание от высококлассных специалистов.
13.4. Пуск и реверсирование двигателей постоянного тока
Пуск двигателей постоянного тока длится от долей секунд до нескольких десятков секунд. Пусковые качества характеризуются
кратностью пускового тока ( |
| I п |
| ) и пускового момента ( | M п | ). | ||
| I ном |
| M ном | |||||
|
|
|
|
|
|
| ||
Пусковой момент |
|
|
|
|
|
| ||
|
|
|
| M п CМ ФIп , |
|
| ||
где пусковой ток Iп | U | 10 | 20 Iном . |
|
| |||
|
|
|
| |||||
Rя |
|
| ||||||
|
|
|
|
|
|
| ||
Если не принять мер, то пуск ДПТ может сопровождаться недопустимым скачком тока якоря и резким толчком на валу.
Такой скачок вызовет искрообразование под щетками, которое может привести к быстрому разрушению коллектора и ухудшает коммутацию машины.
Для предотвращения этого явления пуск ДПТ осуществляется с помощью пускового реостата Rп ( рис. 99), который можно рассчитать, исходя из условия
Iп |
| U |
| 2 2,5 Iном . |
|
|
| ||
Rя |
|
| ||
|
| Rп | ||
Скачок пускового тока в этом случае длится недолго, так как при вращении якоря появляющаяся противо ЭДС уменьшает ток якоря.
После осуществления пуска пусковой реостат (Rп) должен быть полностью выведен вручную или автоматически (Rп = 0).
Двигатели постоянного тока малой мощности можно пускать и без пускового реоcтaтa, так как они обладают достаточно большим сопротивлением якоря. По сравнению с другими двигателями ДПТ имеют самые лучшие пусковые качества. Они могут развивать пуско-
вой момент Mп = (2 4)Mном при пусковом токе Iп = (2 2,5) Iном.
Это обеспечивает быстрый разгон механизмов, приводимых двигателями постоянного тока.
Пусковой реостат, разделенный на секции, выполняется из провода или ленты с высоким удельным сопротивлением. Провода
162
присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции обмотки якоря к другой. По контактам перемещается медная щетка поворотного рычага реостата.
Пуск производится при последовательном уменьшении сопротивления реостата путем перевода рычага реостата с одного неподвижного контакта на другой и выключения секций.
На рис. 99 показана схема пуска ДПТ с параллельным возбуждением.
+–
V
АPA1 Rп 
Рис. 99
В начальный момент пуска пусковой реостат должен быть введен (Rп = max), а реостат в цепи возбуждения выведен (Rр = 0).
Это необходимо для создания наибольшего магнитного потока при пуске. Пусковые реостаты рассчитаны на 4 6 пусков, поэтому необходимо следить, чтобы в конце пуска пусковой реостат Rп был
полностью выведен.
Реверсирование ДПТ осуществляется путем изменения направления вращающего момента. Это достигается или посредством изменения направления тока якоря, или направления потока полюсов, т. е. тока возбуждения Iв. Обычно реверс ДПТ осуществляется путем переключения концов обмоток якоря.

13.5. Регулирование частоты вращения двигателей постоянного тока
Исходя из формулы частоты вращения ДПТ
n | U | I я Rя | , |
| CE Ф | ||
|
|
|
получаем три способа регулирования частоты вращения:
–реостатное регулирование – осуществляется путем изменения суммарного сопротивления цепи якоря и пускового реостата; это регулирование неэкономично и применяется для двигателей малой мощности;
–полюсное регулирование – осуществляется посредством изменения магнитного потока полюсов Ф с помощью реостата в цепи обмотки возбуждения;
–якорное регулирование – осуществляется путем изменения напряжения, подводимого к якорю двигателя. Применяется в основном для двигателей с независимым возбуждением и требует наличия специального источника регулируемого напряжения, при этом пускового реостата не требуется, так как пуск осуществляется при малом напряжении.
Последний способ широко используется в системах автоматического управления.
164
14.ЭЛЕКТРОПРИВОД
14.1.Понятие об электроприводе. Назначение и область применения
Электропривод – совокупность устройств, приводящих в движение производственные механизмы и установки при помощи электрических двигателей.
Современный электропривод – это электромеханический комплекс, в который кроме электродвигателей и рабочих машин входят устройства передачи движения от двигателя к машине (например, редуктор), преобразователи электроэнергии, а также системы управления, в простейшем случае представленные аппаратурой управления пуском, остановкой и аппаратурой регулирования работы привода. Кроме того, аппаратура управления защищает электродвигатели от перегрева и отключает их при отклонении условий работы от нормальных.
Решение задач электропривода сводится к анализу работы проектируемого электропривода, технико-экономическому обоснованию выбора типа двигателя, системы управления им, расчету пусковых реостатов (если они есть) и составлению заявки на электрооборудование.
14.2. Механические характеристики и нагрузочные диаграммы
Для реализации заданного технологического процесса необходимо, чтобы вращающий момент двигателя преодолевал момент сопротивления производственного механизма при определенной скорости вращения (Mвр = Mсопр). Выполнение этого требования возможно только при согласовании механической характеристики электродвигателя и механической характеристики рабочей машины.
Механическая характеристика двигателя – это зависимость его частоты вращения от момента на валу, а механическая характеристика производственного механизма (рабочей машины) – это зависимость его частоты вращения от значения нагрузочного момента.
По виду механической характеристики можно оценить электромеханические свойства электродвигателя, т. е. его пригодность в качестве привода той или иной рабочей машины, так как равенство
11. Бесконтактные двигатели постоянного тока
Двигатели постоянного тока обычного исполнения имеют ценное качество–возможность широко и плавно регулировать скорость вращения. Вместе с тем они обладают существенным недостатком, обусловленным щеточно–коллекторным узлом. Вполне естественно, что появилась мысль создать двигатели, обладающие достоинствами двигателей постоянного тока и свободные от их недостатков. Такие двигатели называются бесконтактными двигателями постоянного тока.
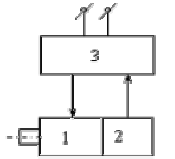
Рис.5.1. Структурная схема бесконтактного двигателя постоянного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 5.1):
1) бесконтактного
двигателя с  –фазной
обмоткой на статоре и возбужденным
ротором обычно в виде постоянного
магнита;
–фазной
обмоткой на статоре и возбужденным
ротором обычно в виде постоянного
магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
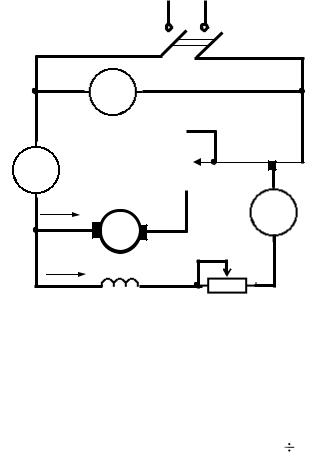
Принцип действия бесконтактного двигателя рассмотрим на примере упрощенной схемы (рис. 5.2). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в пространстве на 120 градусов и соединенными в звезду, ДПР с одним сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их число равно числу обмоток статора), коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме, т.е. в режиме «закрыт» или «открыт».
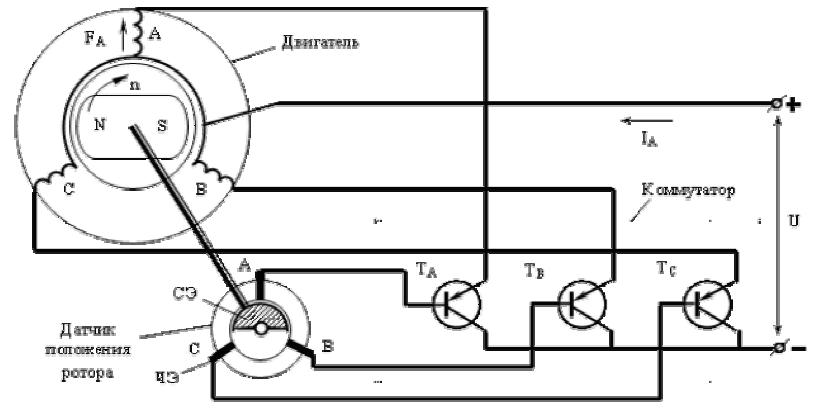
Рис. 5.2. Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
В
положении, показанном на рис. 5.2, сигнальный
элемент через чувствительный элемент
«А» открывает транзистор  .
По обмотке А протекает ток
.
По обмотке А протекает ток .
Намагничивающая сила обмотки
.
Намагничивающая сила обмотки взаимодействует с потоком постоянного
магнита ротора. Возникает вращающий
момент, и двигатель приходит во вращение
(1–й такт на рис. 5.3). Вместе с ротором
поворачивается и СЭ ДПР. При повороте
ротора на угол чуть больший
взаимодействует с потоком постоянного
магнита ротора. Возникает вращающий
момент, и двигатель приходит во вращение
(1–й такт на рис. 5.3). Вместе с ротором
поворачивается и СЭ ДПР. При повороте
ротора на угол чуть больший СЭ будет воздействовать сразу на два
ЧЭ: на «А» и на «В». Это значит,
что будут открыты
СЭ будет воздействовать сразу на два
ЧЭ: на «А» и на «В». Это значит,
что будут открыты
сразу
два транзистора:  и
и .
Ток будет протекать по обеим обмоткам
А и В. Появится результирующая НС статора
.
Ток будет протекать по обеим обмоткам
А и В. Появится результирующая НС статора ,
которая повернется на
,
которая повернется на по сравнению с первым положением (2–й
такт на рис. 5.3).
по сравнению с первым положением (2–й
такт на рис. 5.3).

Рис. 5.3. Первых 3 такта в работе бесконтактного двигателя постоянного тока
Эта НС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда
угол поворота станет чуть больше  ,
транзистор
,
транзистор закроется, ток будет проходить только
по обмотке В. Поле ротора будет
взаимодействовать только с НС этой
обмотки, однако вращающий момент
по–прежнему будет воздействовать на
ротор двигателя и вращать его в том же
направлении (3–й такт на рис. 5.3). В
конечном итоге двигатель разовьет такую
скорость, при которой его момент будет
уравновешиваться моментом нагрузки.
закроется, ток будет проходить только
по обмотке В. Поле ротора будет
взаимодействовать только с НС этой
обмотки, однако вращающий момент
по–прежнему будет воздействовать на
ротор двигателя и вращать его в том же
направлении (3–й такт на рис. 5.3). В
конечном итоге двигатель разовьет такую
скорость, при которой его момент будет
уравновешиваться моментом нагрузки.
Если бы бесконтактный двигатель имел обмоток, чувствительных элементов и транзисторов столько же, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает 3–4.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока.
1. Пульсация вращающего момента – возникает вследствие скачкообразного перемещения НС статора (см. положения 1,2,3 рис. 5.3). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и НС взаимодействующих обмоток статора
 (5.1)
(5.1)
где  – постоянный коэффициент;
– постоянный коэффициент;  – угол между потоком ротора и НС статора.
– угол между потоком ротора и НС статора.
Так как при вращении двигателя угол непрерывно меняется, то и момент двигателя не остается постоянным.
2. Реакция якоря периодически изменяется, становясь то поперечной, то продольно намагничивающей, то продольно размагничивающей (рис. 5.4). Объясняется это опять–таки скачкообразным перемещением НС статора (якоря). Размагничивающее действие поля статора особенно сильно при пуске двигателя, т.к. при этом противо–ЭДС равна 0, а ток – наибольший. С этим необходимо считаться при выборе постоянных магнитов, стабилизация которых происходит в режиме короткого замыкания.
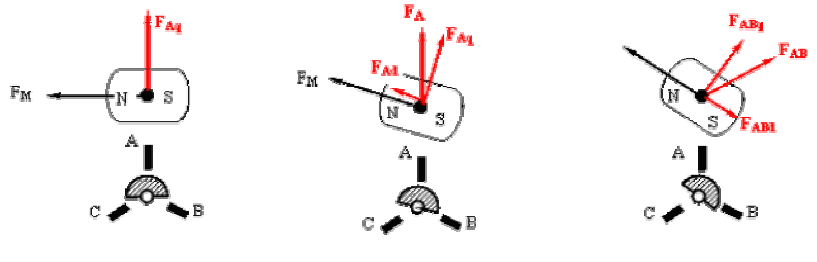
Рис. 5.4. Реакция якоря в бесконтактном двигателе постоянного тока
3. Пульсация токов в обмотках статора и суммарного тока двигателя объясняется дискретным питанием обмоток (в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
4.
Влияние индуктивности обмоток статора.
В обычном двигателе секции якоря
маловитковые, поскольку общее число
витков якоря делится на большое число
секций. Индуктивность таких секций
сравнительно небольшая. В бесконтактном
двигателе общее число витков якоря
разбивается на 3–4 обмотки (секции). В
результате секции получаются
многовитковыми, а, следовательно,
обладающими большой индуктивностью
т.к. 
С учетом ряда допущений уравнение напряжения для якоря можно записать в виде
 (5.2)
(5.2)
Решая его относительно тока, получим
 ,
(5.3)
,
(5.3)
где  – электромагнитная постоянная времени.
– электромагнитная постоянная времени.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности. Тогда
 .
(5.4)
.
(5.4)
При
больших скоростях, когда время коммутации
невелико, ток в обмотках не успевает
достигать установившегося значения.
Его эффективное значение становится
меньше, чем при  .
.
Вращающий момент прямо пропорционален току якоря, поэтому
 (5.5)
(5.5)
или
 (5.6)
(5.6)
Анализ
выражения (5.6) показывает, что момент
имеет две составляющие. Первую – не
зависящую от времени. Она равна моменту
при отсутствии индуктивности. Вторую
– переменную. Она появляется из–за
индуктивности обмоток. Эта составляющая
при всех скоростях имеет отрицательное
значение  .Поэтому
можно утверждать, что, как и ток, вращающий
момент бесконтактного двигателя меньше,
чем вращающий момент обычного коллекторного
двигателя.
.Поэтому
можно утверждать, что, как и ток, вращающий
момент бесконтактного двигателя меньше,
чем вращающий момент обычного коллекторного
двигателя.
Подставим
значение ЭДС  в формулу (5.6), получим механическую
характеристику бесконтактного двигателя
в формулу (5.6), получим механическую
характеристику бесконтактного двигателя
 (5.7)
(5.7)
Выразим
эту характеристику в относительных
единицах, приняв за базисный момент
пусковой момент ( ,
, ),
а за базисную скорость – скорость
холостого хода (
),
а за базисную скорость – скорость
холостого хода ( ,
, ).
Время
).
Время
 ;
;  .
.
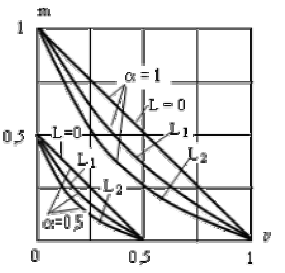
Рис. 5.6.
Механические характеристики бесконтактного
двигателя постоянного тока при разных
значения  и
и  :
: 
Разделим
обе части уравнения (5.7) на  :
:
 .
(5.8)
.
(5.8)
Обозначим  .
С учетом
.
С учетом  получим
получим
 ,
(5.9)
,
(5.9)
где  – относительная скорость двигателя.
– относительная скорость двигателя.
На рис. 5.6 показаны механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
Датчики положения ротора. Датчики положения ротора определяются их чувствительными элементами, которые могут быть построены с использованием ЭДС Холла, фотоэффекта и т.д.
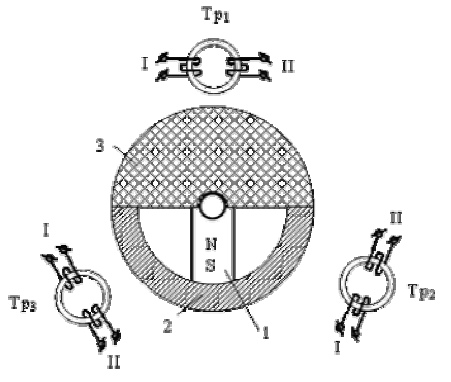
Рис. 5.7. Датчик положения ротора трансформаторного типа
Достаточно широкое распространение получили датчики электромагнитного – трансформаторного типа. На рис. 5.7. показан один из них.
Чувствительными
элементами датчика являются три
трансформатора ( ,
, ,
, ),
сдвинутыми в пространстве на 120 эл. град.
Сердечники трансформаторов выполняются
из быстронасыщающихся материалов –
феррита, пермалоя и тр. Первичные обмотки
трансформаторов (I) питаются напряжением
высокой частоты (порядка нескольких
килогерц) от маломощного источника.
Вторичные обмотки через диоды включаются
в базы соответствующих транзисторов.
),
сдвинутыми в пространстве на 120 эл. град.
Сердечники трансформаторов выполняются
из быстронасыщающихся материалов –
феррита, пермалоя и тр. Первичные обмотки
трансформаторов (I) питаются напряжением
высокой частоты (порядка нескольких
килогерц) от маломощного источника.
Вторичные обмотки через диоды включаются
в базы соответствующих транзисторов.
Ротор датчика состоит из постоянного магнита 1, полюсного наконечника 2, выполненного из магнитомягкого материала, и немагнитного полуцилиндра 3.
Элементам конструкции датчика придаются такие формы и они располагаются так, чтобы сердечники трансформаторов, перекрытые полюсным наконечником 2, были насыщенными. В этом случае ЭДС вторичных обмоток трансформаторов (II) практически равны нулю и сигналы на базы транзисторов не поступают. Управляющие сигналы поступают только от тех трансформаторов, сердечники которых не насыщены.
Вопросы:
1) Нарисуйте диаграмму НС обмоток статора (подобную положениям 1,2,3 на рис. 5.3) при условии, что дуга чувствительного элемента не 180° , а 120° .
2)
Чему равна величина суммарного тока,
потребляемого двигателем из сети, при
различных углах поворота ротора и дуге
ЧЭ в  ?
?