


Правило буравчика: особенности и приёмы
Правило буравчика – упрощенная наглядная демонстрация при помощи одной руки правильного умножения двух векторов. Геометрия школьного курса подразумевает осведомленность учеников о скалярном произведении. В физике часто встречается векторное.
Понятие вектора
Полагаем, нет смысла истолковывать правило буравчика при отсутствии знания определения вектора. Требуется открыть бутылку – знание о правильных действиях поможет. Вектором называют математическую абстракцию, не существующую реально, выказывающую указанные признаки:
- Направленный отрезок, обозначаемый стрелкой.
- Точкой начала послужит точка действия силы, описываемой вектором.
- Длина вектора равна модулю силы, поля, прочих описываемых величин.
Не всегда затрагивают силу. Векторами описывается поле. Простейший пример показывают школьникам преподаватели физики. Подразумеваем линии напряженности магнитного поля. Вдоль обычно рисуются векторы по касательной. В иллюстрациях действия на проводник с током увидите прямые линии.
В иллюстрациях действия на проводник с током увидите прямые линии.
Правило буравчика
Векторные величины часто лишены места приложения, центры действия выбираются по договоренности. Момент силы исходит из оси плеча. Требуется для упрощения сложения. Допустим, на рычаги различной длины действуют неодинаковые силы, приложенные к плечам с общей осью. Простым сложением, вычитанием моментов найдем результат.
Векторы помогают решить многие обыденные задачи и, хотя выступают математическими абстракциями, действуют реально. На основе ряда закономерностей возможно вести предсказание будущего поведения объекта наравне со скалярными величинами: поголовье популяции, температура окружающей среды. Экологов интересуют направления, скорость перелета птиц. Перемещение является векторной величиной.
Правило буравчика помогает найти векторное произведение векторов. Это не тавтология. Просто результатом действия окажется тоже вектор. Правило буравчика описывает направление, куда станет указывать стрелка. Что касается модуля, нужно применять формулы. Правило буравчика – упрощенная чисто качественная абстракция сложной математической операции.
Что касается модуля, нужно применять формулы. Правило буравчика – упрощенная чисто качественная абстракция сложной математической операции.
Аналитическая геометрия в пространстве
Каждому известна задачка: стоя на одном берегу реки, определить ширину русла. Кажется уму непостижимым, решается в два счета методами простейшей геометрии, которую изучают школьники. Проделаем ряд несложных действий:
- Засечь на противоположном берегу видный ориентир, воображаемую точку: ствол дерева, устье ручейка, впадающего в поток.
- Под прямым углом линии противоположного берега сделать засечку на этой стороне русла.
- Найти место, с которого ориентир виден под углом 45 градусов к берегу.
- Ширина реки равна удалению конечной точки от засечки.
Определение ширины реки методом подобия треугольников
Используем тангенс угла. Не обязательно равен 45 градусов. Нужна большая точность – угол лучше брать острым. Просто тангенс 45 градусов равен единице, решение задачки упрощается.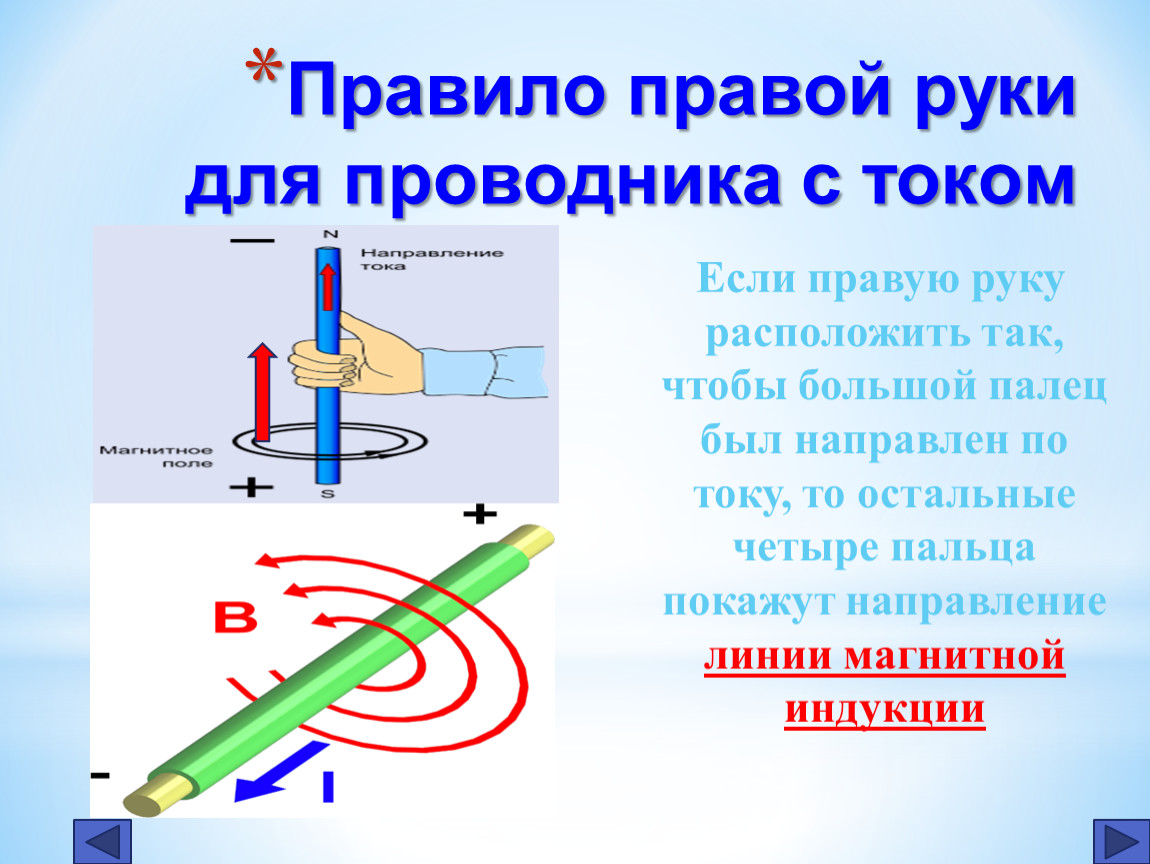
Аналогичным образом удается найти ответы на животрепещущие вопросы. Даже в микромире, управляемом электронами. Можно однозначно сказать одно: непосвященному правило буравчика, векторное произведение векторов представляются скучными, занудными. Удобный инструмент, помогающий в понимании многих процессов. Большинству будет интересным принцип работы электрического двигателя (безотносительно к конструкции). Легко может быть объяснен использованием правила левой руки.
Во многих отраслях науке бок-о-бок идут два правила: левой, правой руки. Векторное произведение иногда может описываться так или эдак. Звучит расплывчато, предлагаем немедленно рассмотреть пример:
- Допустим, движется электрон. Отрицательно заряженная частица бороздит постоянное магнитное поле. Очевидно, траектория окажется изогнута благодаря силе Лоренца. скептики возразят, по утверждениям некоторых ученых электрон не частица, а скорее, суперпозиция полей. Но принцип неопределенности Гейзенберга рассмотрим в другой раз.
 Итак, электрон движется:
Итак, электрон движется:
 Итак, электрон движется:
Итак, электрон движется:Расположив правую руку, чтобы вектор магнитного поля перпендикулярно входил в ладонь, вытянутые персты указывали направление полета частицы, отогнутый на 90 градусов в сторону большой палец вытянется в направлении действия силы. Правило правой руки, являющееся иным выражением правила буравчика. Слова-синонимы. Звучит по-разному, по сути – одно.
Правило левой руки
- Приведем фразу Википедии, отдающую странностью. При отражении в зеркале правая тройка векторов становится левой, тогда нужно применять правило левой руки вместо правой. Летел электрон в одну сторону, по методикам, принятым в физике, ток движется в противоположном направлении. Словно отразился в зеркале, поэтому сила Лоренца определяется уже правилом левой руки:
Если расположить левую руку, чтобы вектор магнитного поля перпендикулярно входил в ладонь, вытянутые персты указывали направление течения электрического тока, отогнутый на 90 градусов в сторону большой палец вытянется, указывая вектор действия силы.
Видите, ситуации похожие, правила просты. Как запомнить, которое применять? Главный принцип неопределенности физики. Векторное произведение вычисляется во многих случаях, причем правило применяется одно.
Какое правило применить
Слова синонимы: рука, винт, буравчик
Вначале разберем слова-синонимы, многие начали спрашивать себя: если тут повествование должно затрагивать буравчик, почему текст постоянно касается рук. Введем понятие правой тройки, правой системы координат. Итого, 5 слов-синонимов.
Потребовалось выяснить векторное произведение векторов, оказалось: в школе это не проходят. Проясним ситуацию любознательным школьникам.
Декартова система координат
Школьные графики на доске рисуют в декартовой системе координат Х-Y. Горизонтальная ось (положительная часть) направлена вправо – надеемся, вертикальная – указывает вверх. Делаем один шаг, получая правую тройку. Представьте: из начала отсчета в класс смотрит ось Z. Теперь школьники знают определение правой тройки векторов.
В Википедии написано: допустимо брать левые тройки, правые, вычисляя векторное произведение, несогласны. Усманов в этом плане категоричен. С разрешения Александра Евгеньевича приведем точное определение: векторным произведением векторов называют вектор, удовлетворяющий трем условиям:
- Модуль произведения равен произведению модулей исходных векторов на синус угла меж ними.
- Вектор результата перпендикулярен исходным (вдвоем образуют плоскость).
- Тройка векторов (по порядку упоминания контекстом) правая.
Правую тройку знаем. Итак, если ось Х – первый вектор, Y – второй, Z будет результатом. Почему назвали правой тройкой? По-видимому, связано с винтами, буравчиками. Если закручивать воображаемый буравчик по кратчайшей траектории первый вектор-второй вектор, поступательное движение оси режущего инструмента станет происходить в направлении результирующего вектора:
- Правило буравчика применяется к произведению двух векторов.
- Правило буравчика качественно указывает направление результирующего вектора этого действия. Количественно длина находится выражением, упомянутым (произведение модулей векторов на синус угла меж ними).
 Количественно длина находится выражением, упомянутым (произведение модулей векторов на синус угла меж ними).
Количественно длина находится выражением, упомянутым (произведение модулей векторов на синус угла меж ними).Теперь каждому понятно: сила Лоренца находится согласно правилу буравчика с левосторонней резьбой. Векторы собраны левой тройкой, если взаимно ортогональны (перпендикулярны один другому), образуется левая система координат. На доске ось Z смотрела бы в направлении взгляда (от аудитории за стену).
Простые приемы запоминания правил буравчика
Люди забывают, что силу Лоренца проще определять правилом буравчика с левосторонней резьбой. Желающий понять принцип действия электрического двигателя должен как дважды два щелкать подобные орешки. В зависимости от конструкции число катушек ротора бывает значительным, либо схема вырождается, становясь беличьей клеткой. Ищущим знания помогает правило Лоренца, описывающее магнитное поле, где движутся медные проводники.
Для запоминания представим физику процесса. Допустим, движется электрон в поле. Применяется правило правой руки для нахождения направления действия силы. Доказано: частица несет отрицательный заряд. Направление действия силы на проводник находится правилом левой руки, вспоминаем: физики совершенно с левых ресурсов взяли, что электрический ток течет в направлении противоположном тому, куда направились электроны. И это неправильно. Поэтому приходится применять правило левой руки.
Применяется правило правой руки для нахождения направления действия силы. Доказано: частица несет отрицательный заряд. Направление действия силы на проводник находится правилом левой руки, вспоминаем: физики совершенно с левых ресурсов взяли, что электрический ток течет в направлении противоположном тому, куда направились электроны. И это неправильно. Поэтому приходится применять правило левой руки.
Не всегда следует идти такими дебрями. Казалось бы, правила больше запутывают, не совсем так. Правило правой руки часто применяется для вычисления угловой скорости, которая является геометрическим произведением ускорения на радиус: V = ω х r. Многим поможет визуальная память:
- Вектор радиуса круговой траектории направлен из центра к окружности.
- Если вектор ускорения направлен вверх, тело движется против часовой стрелки.
Посмотрите, здесь опять действует правило правой руки: если расположить ладонь так, чтобы вектор ускорения входил перпендикулярно в ладонь, персты вытянуть по направлению радиуса, отогнутый на 90 градусов большой палец укажет направление движения объекта. Достаточно однажды нарисовать на бумаге, запомнив минимум на половину жизни. Картинка действительно простая. Больше на уроке физики не придется ломать голову над простым вопросом – направление вектора углового ускорения.
Достаточно однажды нарисовать на бумаге, запомнив минимум на половину жизни. Картинка действительно простая. Больше на уроке физики не придется ломать голову над простым вопросом – направление вектора углового ускорения.
Аналогичным образом определяется момент силы. Исходит перпендикулярно из оси плеча, совпадает направлением с угловым ускорением на рисунке, описанном выше. Многие спросят: зачем нужно? Почему момент силы не скалярная величина? Зачем направление? В сложных системах непросто проследить взаимодействия. Если много осей, сил, помогает векторное сложение моментов. Можно значительно упростить вычисления.
Момент силы относительно точки как вектор
I. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО точки КАК ВЕКТОР И МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ [c.84]Момент силы относительно точки как вектор. Напомним, что векторным произведением а на Ь называют вектор с, направленный перпендикулярно к а и Ь согласно правилу буравчика , а по модулю равный произведению модулей а и Ь яа синус угла между направлениями этих векторов.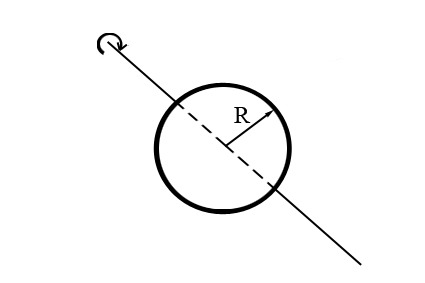 Следовательно, как видно из (97), момент силы по своей величине равен модулю векторного произведения радиуса-вектора г на вектор силы F, и момент силы относительно точки О как вектор можно представить так
[c.230]
Следовательно, как видно из (97), момент силы по своей величине равен модулю векторного произведения радиуса-вектора г на вектор силы F, и момент силы относительно точки О как вектор можно представить так
[c.230]
Момент силы относительно точки как вектор. [c.36]
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ КАК ВЕКТОР [c.156]
Словами это равенство можно прочитать так момент равнодействующей системы сходящихся сил относительно какой-либо точки равен сумме моментов всех сил относительно той же точки. Момент силы относительно точки есть вектор, поэтому сумма является геометрической. В частном случае, если все силы и центр моментов
Словами это равенство можно прочитать так момент равнодействующей системы сходящихся сил относительно какой-либо точки равен сумме моментов всех сил относительно той же точки. Момент силы относительно точки есть вектор, поэтому сумма является геометрической. В частном случае, если все силы и центр моментов лежат в одной плоскости, то все векторы моментов направлены по
В частном случае, если все силы и центр моментов лежат в одной плоскости, то все векторы моментов направлены по
В случае сил, лежащих в различных непараллельных плоскостях, правило знаков теряет свой смысл, и моменты силы относительно точки, как и моменты пар, рассматриваются как векторы. [c.72]
Как известно, сила — скользящий вектор, поэтому при переносе силы р по линиям действия из точки А в любую другую точку Ль Ла и т. д. (рис. 1.38) длина плеча не изменится, а значит не изменится и значение момента силы относительно точки. [c.33]
Выражение момента силы относительно точки в виде вектора вполне соответствует физической сущности этого понятия, и если силы расположены в различных плоскостях, то моменты сил относительно точки складывают по правилу параллелограмма. Только при рассмотрении системы сил, расположенных в одной плоскости, можно игнорировать направление вектора момента, а учитывать его величину и знак, т.
Для тех случаев, когда тело совершает сложное движение, например вращается вокруг оси в то время, как эта ось поворачивается, удобно изображать угловую скорость вектором, направленным вдоль оси вращения Величина и положение вектора показывают величину угловой скорости и положение оси вращения. Но вектор угловой скорости, как и вектор момента силы относительно точки, отличается от прочих известных нашим читателям векторов (скорость точки, ускорение точки, радиус-вектор, сила и др.) тем, что, изображая его стрелкой соответствующей длины, отложенной вдоль оси вращения, надо (вполне произвольно) условиться относительно направления стрелки.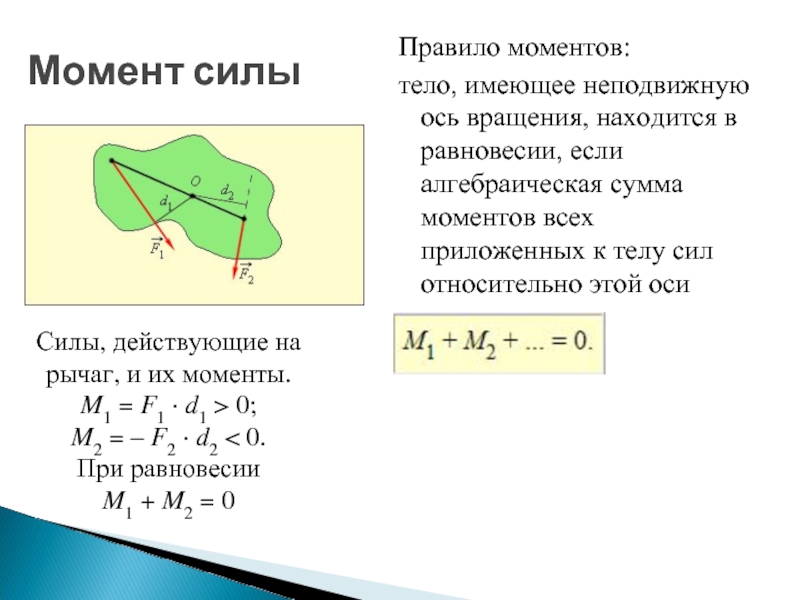
Вектор момента силы относительно точки можно рассматривать как векторное произведение радиуса-вектора, проведённого из этой точки в точку приложения силы, на вектор силы. 2. Вектор момента пары сил можно переносить в любую точку, т.е. момент пары сил является свободным вектором.
Момент силы относительно точки. Момент, или вращающий момент, N силы относительно данной точки определяется как г X F, где г — вектор, идущий из данной точки в точку приложения силы F. Пусть сила F = — Зх-Ь -f- у -Ь 5z приложена в точке г = 7х Зу -Ь z ). Помните, что FXr = —rXF-
[c.65]
Пусть сила F = — Зх-Ь -f- у -Ь 5z приложена в точке г = 7х Зу -Ь z ). Помните, что FXr = —rXF-
[c.65]
Установим зависимость между моментом силы относительно точки и моментом силы относительно оси. Для этого момент силы Р относительно точки О, обозначенный Шо(Р) (рис. 83), отложим в виде вектора, направленного перпендикулярно к плоскости ОАВ. Затем через точку О проведем какую-либо ось, определим момент силы относительно этой оси и отложим на оси отрезок ОК, соответствующий в принятом масштабе моменту относительно оси.
Так же как и момент пары, момент силы относительно точки можно изобразить в виде вектора, приложенного в центре момента [c.46]
Направление плоскости в пространстве, как известно, может быть задано перпендикуляром к этой плоскости. Чтобы одновременно определить величину момента силы относительно точки и направление плоскости, проходящей через линию действия силы и центр момента, естественно рассматривать момент силы то(Р) относительно точки О (рис.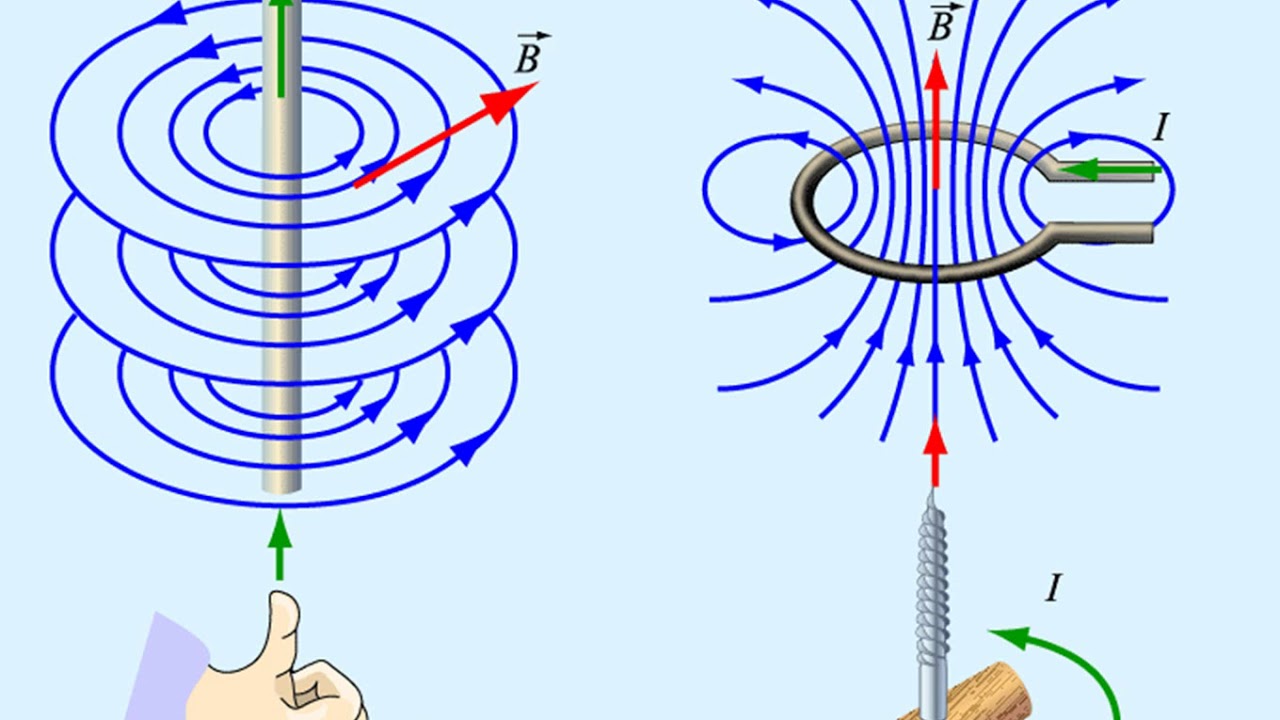
В этом случае момент силы относительно точки рассматривается как вектор, о чем сказано в 35. [c.65]
В каком случае вектор-момент силы относительно точки равен нулю [c.217]
Как определить величину момента силы относительно точки через радиус-вектор точки приложения силы и его угол с вектором силы
Пользуясь соотношением (4.8) и рис. 55, составим уравнение моментов всех сил инерции материальных точек звена. Как известно, момент силы относительно точки равен векторному произведению радиуса-вектора точки приложения силы на вектор силы [c.83]
Он писал История науки раскрывает генезис и эволюцию основных ее понятий, идей и законов, благодаря чему они могут быть поняты и освоены гораздо естественней, глубже и поэтому прочнее. Такие фундаментальные понятия механики, как сила, свойство инерции материи, масса, сила инерции и т. п., не могут быть поняты и освоены сколь-нибудь удовлетворительно без представления об их эволюции. Точно так же важно для успешного усвоения изложить историю таких понятий, как, например, момент силы относительно точки, вектор ускорения, работа силы, моменты инерции твердого тела и т. п., или, наконец, такого важного понятия, как сила движущегося тела , понятия, из анализа которого и выросла, в сущности, наша классическая динамика .
Такие фундаментальные понятия механики, как сила, свойство инерции материи, масса, сила инерции и т. п., не могут быть поняты и освоены сколь-нибудь удовлетворительно без представления об их эволюции. Точно так же важно для успешного усвоения изложить историю таких понятий, как, например, момент силы относительно точки, вектор ускорения, работа силы, моменты инерции твердого тела и т. п., или, наконец, такого важного понятия, как сила движущегося тела , понятия, из анализа которого и выросла, в сущности, наша классическая динамика .
Отсюда, зная, как определяются модуль и направление вектора-момента пары, мы приходим к следующему определению момента силы относительно точки [c.168]
Общий момент пары сил короче называется моментом пары, следовательно, момент пары не зависит от того, для какой точка пространства мы его вычисляем. Таким образом, момент силы относительно точки представляет пример век- тора приложенного, сама сила — пример вектора скользящего, а момент пары — пример вектора свободного. [c.86]
[c.86]
Теория пар сил. Момент силы относительно точки (центра) как вектор. Пара сил. Момент пары сил как вектор. Теорема о сумме моментов сил, образующих пару, относительно любого центра. Теоремы об эквивалентности пар. Сложение пар, произвольно расположенных в пространстве. Условия равновесия системы пар.
Момент силы относительно точки как вектор. Напомним, что векторным произведе- [c.58]
Опыт преподавания статики в новом изложении показал, что определенные трудности понимания статики порождаются более широким применением векторной алгебры. Для устранения этих трудностеГ в начале семестра студентам выдавались индивидуальные задания по теме Сложение векторов и решение линейных векторных уравнений аналитическим, графическим и геометрическим способами . Перед определением вектора-момента силы рассматривалось понятие момента силы относительно оси, которое делает возможной интерпретацию вектора-момента силы относительно точки как вектора, проекции которого на взаимно перпендикулярные оси, проходящие через данную точку, равны моментам силы относительно этих осей.

В разделе Статика ( 44 и 45) введены и широко использо-взЕгы понятая моментов силы относительно точки и относительно оси. Так как количество движения материальной точки mv является вектором, ТО можно определить его моменты относительно центра н относительно оси таким же путем, как определяются моменты силы. [c.145]
Примерами таких псевдовекторов могут служтггь, как мы только что видели, векторное произведение двух физических векторов, а следовательно, вектор момента силы относительно точки, момент пары сил, вектор угловой скорости вращения абсолютно твердого тела. [c.123]
ЭТОГО понятия уже входило задание положения в пространстве плоскости, проходящей через линию действия силы и выбранную в пространстве точку. Положение плоскости в пространстве, как известно, можно задать направлением перпендикуляра к этой плоскости. Таким образом, в определение момента силы относительно точки должны входить как модуль момента, так и указание направления перпендикуляра к плоскости, проходящей через линию действия силы и через выбранную точку. Отсюда вытекает следующее векторное определение момента силы Р относительно точки О (рис. 112) моментом силы Р относительно точки О называется вектор, приложенный в точке О, равный по модулю произведению модуля силы на ее плечо и направленный по перпендикуляру к плоскости ОАВ, проходящей через линию действия силы Р и точку О, в ту сторону, откуда вращние тела силой представляется происходящим против часовой стрелки.
[c.157]
Таким образом, в определение момента силы относительно точки должны входить как модуль момента, так и указание направления перпендикуляра к плоскости, проходящей через линию действия силы и через выбранную точку. Отсюда вытекает следующее векторное определение момента силы Р относительно точки О (рис. 112) моментом силы Р относительно точки О называется вектор, приложенный в точке О, равный по модулю произведению модуля силы на ее плечо и направленный по перпендикуляру к плоскости ОАВ, проходящей через линию действия силы Р и точку О, в ту сторону, откуда вращние тела силой представляется происходящим против часовой стрелки.
[c.157]
В заключение необходимо отметить еще одно обстоятельство, связанное с исследуешм понятием. Плохо запоминаются понятие о векторе m (F), и порядок сомноштелей в векторном произведекш еще и потому, что при решении задач моменты сил относительно точек (а затем и моменты сил относительно осей) определяются как скалярные величины, тлеющие определенный знак. Правило знаков -
[c.12]
Правило знаков -
[c.12]
Необходимость последнего вывода связана с тем, что при решении задач большей частью имеют дело.с парами сил, расположенными в одной плоскости. Показывать векторы-моменты этих пар перпендикулярными плоскости их действия совервенно нецелесообразно. Поэтому моменты пар, как и моменты сил относительно точек при решении задач на плоскую систему сил, считают в этом случае алгебраическими величинами и с тем же правилом знаков в зависимости от направления вращения тела под действием пары. Только знак моманта силы относительно точки зависит от выбора моментной точки, а знак момента пары сил — не зависит ( вспомните первую теорему о парах ). В заключение остается сказать, что условные изображения пар сил ( см.плакат 7с) на чертежах к задачам могут быть разными. Обычно на чертеже к задаче круговой стрелкой задается направление вращения пары, а в данных к задаче указывается величина крутящего момента пары сил. [c.19]
Какю.[c.107]
Момент силы относительно точки. Таким образом, из учения о равновесии рычага вытекла необходимость наряду с силами рассматривать ещё произведения величин сил на плечи. Несколько обобщая изложенное, рассмотрим силу Г и произвольную точку О пространства опустим из точки О перпендикуляр на прямую действия силы Р, и пусть будет й длина этого перпендикуляра. Мы условимся рассматривать произведения Рй, принимая их за модули некоторых векторов. Чтобы выяснить возможность последнего, необходимо показать, что, во-первых, произведения Рй можно рассматривать как величины некоторых количеств, имеющих направления в пространстве, и, во-вторых, что эти количества можно геометрически складывать. Чтобы убедиться в первом, вернёмся снова к рычагу и обратимся, например, к черт. 18. Так как сила Р стремится производить вращение вокруг точки О против часовой стрелки, а сила Q — по часовой стрелке, то согласно условию, выраженному в конце 4, для силы Р положительное направление оси вращения будет итти перпендикулярно к плоскости чертежа к лицу читателя, а для силы Q — от читателя. Условимся откладывать в положительном направлении на оси вращения отрезок, символически изображающий в каком-либо масштабе произведение Рй. Таким образом, мы будем получать отрезки, символически изображающие пО своей длине произведения Рй и имеющие определённые направления в пространстве. Чтобы убедиться, что эти отрезки суть векторы, остаётся показать, что эти отрезки можно геометрически складывать. Для этого рассмотрим какую-нибудь точку О и ряд сил Р , Р у Р у. .., которые могут и не лежать в одной плоскости. Построим для этих сил вышеуказанным приёмом отрезки с длинами Р с1 , [c.40]
Как определить знак момента силы. Правило знаков изгибающих моментов и поперечных сил. Алгоритм решения задачи
Составляя сумму моментов, мы используем правило знаков термеха: против часовой стрелки «+», по часовой стрелке «-». Это не формулировка, но так гораздо проще запомнить.
У многих встречается проблема: как понять в какую сторону сила вращает конструкцию?
Вопрос не очень сложный и если знать некоторые хитрости — довольно легкий в понимании.
Начнем с простого, у нас есть схема
И для примера нам нужна сумма моментов относительно точки А.
Будем идти по порядку слева на право:
Ra и Ha не дадут момента, так как они действуют в точке А и у них к этой точке не будет плеча.
Это пример: зеленая линия — линия силы Ra, желтая — На. К точке А нету плеч, т.к. она лежит на линиях действия этих сил.
Продолжим: момент, возникающий в жесткой заделке Ма. С моментами довольно просто, в какую сторону он направлен разберется любой, в данном случае он направлен против часовой стрелки.
Сила от распределенной нагрузки Q направлена вниз с плечом 2,5 . Куда же она вращает нашу конструкцию?
Отбросим все силы, кроме Q. Помним, что в точке А у нас забит «гвоздь».
Если представить, что точка А — центр циферблата часов, то видно, что сила Q вращает нашу балку по часовой стрелке, а значит знак будет «-».
Точка А — центр циферблата и F вращает балку против часовой стрелки, знак будет «+»
С моментом все понятно, он направлен против часовой стрелки, а значит вращает балку в ту же сторону.
Бывают другие моменты:
Дана рама. Нам нужно составить сумму моментов относительно точки А.
Рассматриваем только силу F, не трогаем реакции в заделке.
И так, в какую сторону сила F вращает конструкцию относительно точки А?
Для этого, как и раньше мы проводим из точки А оси, а для F — линию действия силы
Теперь все видно и понятно — конструкция вращается по часовой стрелке
Таким образом, проблем с направлением быть не должно.
Действие одной силы или системы сил на твёрдое тело может быть связано не только с поступательным, но и с вращательным движением. Как известно, силовым фактором вращательного движения является момент силы.
Рассмотрим гайку, которую затягивают гаечным ключом определённой длины, прикладывая к концу ключа мускульное усилие. Если взять гаечный ключ в несколько раз длиннее, то, прилагая то же усилие, гайку можно затянуть значительно сильнее. Из этого следует, что одна и та же сила может оказывать различное вращательное действие. Вращательное действие силы характеризуется моментом силы .
Понятие момента силы относительно точки ввёл в механику итальянский учёный и художник эпохи Возрождения Леонардо да Винчи.
Моментом силы относительно точки называется произведение модуля силы на ее плечо (рис. 5.1):
Точка, относительно которой берется момент, называется центром момента. Плечом силы относительно точки называется кратчайшее расстояние от центра момента до линии действия силы.
Единица момента силы в системе СИ:
[М] = [Р] · [h] = сила ∙ длина = ньютон ∙ метр = Н ∙м .
Рис. 5.1. Момент силы относительно точки
Рис. 6.1
Понятие пары сил введено в механику в начале XIX в. французским учёным Пуансо, который разработал теорию пар. Рассмотрим основные понятия.
Любые две силы, кроме сил, образующих пару, можно заменить равнодействующей. Пара сил не имеет равнодействующей, и никакими способами пару сил нельзя преобразовать к одной эквивалентной силе. Пара – такой же самостоятельный простейший механический элемент, как и сила.
Плоскость, в которой лежат силы, образующие пару, называют плоскостью действия пары . Кратчайшее расстояние между линиями сил, образующих пару, называют плечом пары h . Произведение модуля одной из сил пары на её плечо называют моментом пары и обозначают
М = ± Ph . (6.1)
Действие пары на тело характеризуется моментом, стремящимся вращать тело. При этом, если пара сил вращает тело против часовой стрелки, то момент такой пары считается положительным, если по часовой стрелке, то момент считается отрицательным.
Свойства пар
Не изменяя действия на тело, пару сил можно:
1) как угодно перемещать в её плоскости;
2) переносить в любую плоскость, параллельную плоскости действия этой пары;
3) изменять модуль сил и плечо пары, но так, чтобы ее момент (т. е. произведение модуля силы на плечо) и направление вращения оставались неизменными;
4) алгебраическая сумма проекций сил, образующих пару, на любую ось равна нулю;
5) алгебраическая сумма моментов сил, образующих пару, относительно любой точки постоянна и равна моменту пары.
Две пары считают эквивалентными, если они стремятся вращать тело в одну сторону и их моменты численно равны. Пару может уравновесить только другая пара с моментом, имеющим противоположный знак.
Сложение пар
Система пар, лежащих в одной плоскости или параллельных плоскостях, эквивалентна одной равнодействующей паре , момент которой равен алгебраической сумме моментов слагаемых пар, т. е.
Равновесие пар
Плоская система пар находится в равновесии, если алгебраическая сумма моментов всех пар равна нулю, т. е. .
Часто бывает удобным представить момент пары в виде вектора. Вектор-момент пары направлен перпендикулярно к плоскости действия пары в сторону, откуда вращательное действие пары наблюдается против часовой стрелки (рис. 6.2).
Рис. 6.2. Вектор-момент пары сил
Пример 7. На балку, свободно опирающуюся на гладкий уступ А и шарнирно укреплённую в точке В, действует пара с моментом М = 1500 Нм. Определить реакции в опорах, если l = 2 м (рис. 6.3, а ).
Решение . Пару может уравновесить только другая пара с равным, но противоположно направленным моментом (рис. 6.3, б ). Следовательно,
Теоретическая механика. Статика :
Система сходящихся сил
Определение и теорема о трех силах
Графическое определение равнодействующей сходящихся сил
Аналитическое задание силы
Аналитическое определение равнодействующей сходящихся сил
Условия и уравнения равновесия системы сходящихся сил
Решение задач
★ Равновесие под действием сходящейся системы сил
Теория пар сил
Пара сил и ее свойства
Теоремы об эквивалентности пар
Сложение пар сил
Равновесие систем пар
Приведение плоской системы сил
Лемма Пуансо
Теорема о приведении плоской системы сил
Частные случаи приведения плоской системы сил
Уравновешенная система сил
Определение опорных реакций плоских стержневых систем
★ Равновесие под действием системы параллельных сил на плоскости
Система параллельных сил
Произвольная плоская система сил
Произвольная плоская система сил. РГР 1
★ Равновесие плоской произвольной системы сил
Расчет составных систем
Расчет составных систем. РГР 2
★ Равновесие системы тел 1
★ Равновесие системы тел 2
★ Равновесие системы тел 3
Графическое определение опорных реакций
subjects:termeh:statics:момент_силы_относительно_центра
Рассмотрим тело, которое закреплено в центре О и может поворачиваться вокруг оси, проходящей через точку О и перпендикулярной к плоскости чертежа. Приложим в точке А этого тела силу P и выясним, чем определяется вращательное действие этой силы (Рис.1 ).
Очевидно, что воздействие силы на тело будет зависеть не только от ее величины, но и от того, как она направлена, и в конечном итоге будет определяться ее моментом относительно центра О .
Определение 1. Моментом силы Р относительно центра О называется взятое со знаком $\pm$ произведение модуля силы на ее плечо – то есть длину перпендикуляра, опущенного из моментной точки на линию действия силы.
Правило знаков: момент силы считается положительным, если сила стремится повернуть тело против хода часовой стрелки и отрицательным, если она вращает тело по ходу часовой стрелки.
В соответствии с данным определением момент силы численно равен удвоенной площади треугольника OAB, построенного на векторе силы P с вершиной в моментной точке: $M_0(P) = P\cdot d = 2S\Delta_{OAB}$ .
Отметим, что момент силы относительно точки О равен нулю, если линия действия силы проходит через моментную точку .
Рассмотренное определение момента силы подходит только для плоской системы сил. В общем случае для однозначного описания вращательного действия силы введем следующее определение.
Определение 2. Вектор-моментом силы Р относительно центра О называется вектор, который:
приложен в моментной точке О перпендикулярно к плоскости треугольника, построенного на векторе силы с вершиной в моментной точке ;
направлен по правилу право винта ;
равен по модулю моменту силы Р относительно центра О ( Рис.1а ).
Правило правого винта , известное также из курса физики как правило буравчика , означает, что если смотреть навстречу вектор-моменту $\vec{М_0}(\vec{P})$ , мы увидим вращение силой $\vec{P}$ плоскости своего действия, происходящим против хода часовой стрелки .
Обозначим через $\vec{r}$ радиус-вектор точки приложения силы $\vec{P}$ и докажем, что справедлива следующая
Теорема 1. Вектор-момент силы $\vec{P}$ относительно центра О равен векторному произведению радиус-вектора $\vec{r}$ и вектора силы $\vec{P}$ :
$$\vec{M_0}(\vec{P}) = (\vec{r} \times \vec{P})$$
Напомним, что векторным произведением векторов $\vec{a}\text{ и }\vec{b}$ называется вектор $\vec{c}$ , который (Рис.2б ):
перпендикулярен к векторам $\vec{a}\text{ и }\vec{b}$ ;
образует с ними правую тройку векторов, то есть, направлен так, что, смотря навстречу этому вектору, мы увидим поворот от вектора $\vec{a}$ к вектору $\vec{b}$ на наименьший угол происходящим против хода часовой стрелки;
равен по модулю удвоенной площади треугольника, построенного на этих векторах:
$$|\vec{c}| = |\vec{a} \times \vec{b}| = |\vec{a}|\cdot|\vec{b}|\cdot\sin(\vec{a},\,\vec{b})$$
Для доказательства теоремы отметим, во-первых, что вектор, равный векторному произведению векторов $\vec{r}\text{ и }\vec{P}$ будет коллинеарным вектору $\vec{M_0}(\vec{P})$.{i=n}M_{0\,\,i}(\vec{P_i})$$
Примечание
В учебной литературе термин «момент» применяют для обозначения как момента силы, так и ее вектор-момента.
subjects/termeh/statics/момент_силы_относительно_центра.txt · Последние изменения: 2013/07/19 19:53 — ¶
Момент силы относительно точки определяется произведением модуля силы на длину перпендикуляра, опущенного из точки на линию действия силы (рисунок 4).
Рисунок 4 – Момент силы F относительно точки О
При закреплении тела в точке О сила F стремится поворачивать его вокруг этой точки. Точка О, относительно которой берется момент, называется центром момента, а длина перпендикуляра а называется плечом силы относительно центра момента.
Момент силы F относительно О определяется произведением силы на плечо.
М О (F) = F·a.
Момент принято считать положительным, если сила стремится вращать тело по часовой стрелке, а отрицательным — против часовой стрелки. Когда линия действия силы проходит через данную точку, момент силы относительно этой точки равен нулю, так как в рассматриваемом случае плечо а = 0 (рисунок 5).
Рисунок 5 – Определение знака момента силы относительно точки
Между моментом пары и моментом силы есть одно существенное различие. Численное значение и направление момента пары сил не зависят от положения этой пары в плоскости. Значение и направление (знак) момента силы зависят от положения точки, относительно которой определяется момент.
Уравнения равновесия плоской системы сил
Условия равновесия сил на плоскости: для равновесия системы сил, произвольно расположенных в плоскости, необходимо и достаточно, чтобы главный вектор и главный момент этих сил относительно любого центра каждый в отдельности равнялся нулю.
F ГЛ = 0; М ГЛ = Σ М О (F i) = 0.
Получим основную форму уравнения равновесия:
Теоретически уравнений моментов можно записать бесконечное множество, но практически для решения задач на плоскости достаточно трех уравнений равновесия. В каждом конкретном случае используются уравнения с одним неизвестным.
Для разных случаев используются три группы уравнений равновесия:
1. Первая форма уравнений равновесия
2. Вторая форма уравнений равновесия
3. Третья форма уравнений равновесия
Для системы параллельных сил (рисунок 43), можно составить только два уравнения равновесия:
Пример.
Дано: F = 24 кH; q = 6 кН/м; М = 12 кН·м α = 60°; а = 1,8 м; b = 5,2 м; с = 3,0 м. Определить реакции V A , H A и V В (рисунок 6).
Рисунок 6 – Заданная двухопорная балка
Отбрасываем связи (опоры А и В), заменяем их действие реакциями: неподвижная опора имеет реакции V А (вертикальная) и H А (горизонтальная). Подвижная опора — реакцию V B (вертикальная). Выбираем систему координат ХУ с началом в левой опоре, определяем равнодействующую распределенной нагрузки:
Q = q·a 2 = 6·5,2 = 31,2 кН.
Чертим расчетную схему балки (рисунок 7).
Рисунок 7 – Расчётная схема балки
Для полученной произвольной плоской системы сил составляем уравнения равновесия:
∑F ix = 0; H A – F·cos60° = 0;
∑F i у = 0; V A – F·cos30° – Q + V B = 0;
∑М А (F i) = 0; Q·(1,8 + 2,6) + F·cos30°·(1,8 + 5,2) – М – V B ·(1,8 + 5,2 + 3) = 0.
Решаем систему уравнений.
H A = F·cos60° = 24·0,5 = 12 кН;
V A = F·cos30° + Q – V B = 24·0,866 + 31,2 – 27,08 = 24,9 кН.
Для проверки правильности решения составим сумму моментов относительно точки приложения наклонной силы F:
∑М А (F i) = V A ·(1,8 + 5,2) – Q·2,6 – М – V B ·3 = 24,9·7 – 31,2·2,6 – 12 – 27,08·3 = – 0,06.
Ответ: опорные реакции балки равны V A = 24,9 кН; V В = 27,08 кН; Н А = 12 кН.
Контрольные вопросы:
1. Что определяет эффект действия пары сил?
2. Зависит ли эффект действия пары сил от её положения в плоскости?
3.Зависят ли значения и направление момента силы относительно точки от взаимного расположения этой точки и линии действия силы?
4. Когда момент силы относительно точки равен нулю?
5. Сколь независимых уравнений равновесия можно составить для плоской системы параллельных сил?
Инструкция
Пусть Q – точка, относительно которой рассматривается момент силы. Эта точка называется полюсом. Проведите радиус-вектор r из этой точки к точке приложения силы F. Тогда момент силы M определяется как векторное произведение r на F: M=.
Результатом векторного произведения является вектор. Длина вектора выражается модулем: |M|=|r|·|F|·sinφ, где φ – угол между r и F. Вектор M ортогонален как вектору r, так и вектору F: M⊥r, M⊥F.
Направлен вектор M таким образом, что тройка векторов r, F, M является правой. Как определить, что тройка векторов именно правая? Представьте себе, будто вы (ваш глаз) находитесь на конце третьего вектора и смотрите на два других вектора. Если кратчайший переход от первого вектора ко второму кажется происходящим против часовой стрелки, это правая тройка векторов. В противном случае, вы имеете дело с левой тройкой.
Итак, совместите начала векторов r и F. Это можно сделать параллельным переносом вектора F в точку Q. Теперь через эту же точку проведите ось, перпендикулярную плоскости векторов r и F. Данная ось будет перпендикулярна векторам сразу. Тут возможны, в принципе, только два варианта направить момент силы: вверх или вниз.
Попробуйте направить момент силы F вверх, нарисуйте стрелочку вектора на оси. Из этой стрелочки как бы взгляните на вектора r и F (можете символический глаз). Кратчайший переход от r к F можете обозначить закругленной стрелочкой. Является ли тройка векторов r, F, M правой? Стрелочка указывает направление против часовой стрелки? Если да, то вы верное направление для момента силы F. Если же нет, значит, надо сменить направление на противоположное.
Определить направление момента силы можно также по правилу правой руки. Указательный палец совместите с радиус-вектором. Средний палец совместите с вектором силы. С конца поднятого вверх большого пальца посмотрите на два вектора. Если переход от указательного к среднему пальцу осуществляется против часовой стрелки, то направление момента силы совпадает с направлением, которое указывает большой палец. Если переход идет по часовой стрелке, то направление момента силы противоположно ему.
Правило буравчика очень похоже на правило руки. Четырьмя пальцами правой руки как бы вращайте винт от r к F. Векторное произведение будет иметь то направление, куда закручивается буравчик при таком мысленном вращении.
Пусть теперь точка Q располагается на той же прямой, которая содержит вектор силы F. Тогда радиус-вектор и вектор силы будут коллинеарны. В этом случае их векторное произведение вырождается в нулевой вектор и изображается точкой. Нулевой вектор не имеет никакого определенного направления, но считается сонаправленным любому другому вектору.
Чтобы правильно рассчитать действие силы, вращающей тело, определите точку ее приложения и расстояние от этой точки до оси вращения. Это важно для определения технических характеристик различных механизмов. Крутящий момент двигателя можно рассчитать, если известна его мощность и частота вращения.
Вам понадобится
- Линейка, динамометр, тахометр, тестер, тесламетр.
Инструкция
Определите точку или ось, вокруг которой тело. Найдите точку приложения силы. Соедините точку приложения силы и точку вращения, или опустите перпендикуляр на ось вращения. Измерьте это расстояние, оно «плечо силы». Измерение проводите в метрах. Силу измерьте в ньютонах с помощью динамометра. Измерьте угол между плечом и вектором силы. Для расчета вращающего момента найдите произведение силы и синус угла между ними M=F r sin(α). Результат получите в ньютонах на метр.
Учреждение образования «Белорусский государственный
%PDF-1.6 % 3345 0 obj >/Outlines 725 0 R/Metadata 3436 0 R/AcroForm 3346 0 R/Pages 3326 0 R/OCProperties>/OCGs[3347 0 R]>>/StructTreeRoot 761 0 R/Type/Catalog>> endobj 725 0 obj > endobj 3436 0 obj >stream 2014-01-02T13:55:13+02:002014-01-02T13:54:59+02:002014-01-02T13:55:13+02:00Adobe Acrobat 8.0 Combine Filesapplication/pdf
jQ5!P&)`py~=?o?;ϯD?:y-yQV%#.h(4A,q#s9äHߍ@{‘-‘f~ϭJ!P$>Yujb6n|,Qm5𢶗N]+0hMN `:
Момент силы. Момент импульса.
Пусть некоторое тело под действием силы F, приложенной в точке А, приходит во вращение вокруг оси ОО’ (рис. 1.14).
Сила действует в плоскости, перпендикулярной оси. Перпендикуляр р, опущенный из точки О (лежащей на оси) на направление силы, называют плечом силы. Произведение силы на плечо определяет модуль момента силы относительно точки О:
М = Fp=Frsinα.
Момент силы есть вектор, определяемый векторным произведением радиуса-вектора точки приложения силы и вектора силы:
(3.1)
Единица момента силы — ньютон-метр (Н • м).
Направление М можно найти с помощью правила правого винта.
Моментом импульса частицы называется векторное произведение радиус-вектора частицы на её импульс:
или в скалярном виде L = гPsinα
Эта величины векторная и совпадает по направлению с векторами ω.
§ 3.2 Момент инерции. Теорема Штейнера
Мерой инертности тел при поступательном движении является масса. Инертность тел при вращательном движении зависит не только от массы, но и от ее распределения в пространстве относительно оси вращения. Мерой инертности при вращательном движении служит величина, называемая моментом инерции тела относительно оси вращения.
Моментом инерции материальной точки относительно оси вращения называют произведение массы этой точки на квадрат расстояния её от оси:
Ii=miri2 (3.2)
Момент инерции тела относительно оси вращения называют сумму моментов инерции материальных точек, из которых состоит это тело:
(3.3)
Момент инерции тела зависит от того, относительно какой оси оно вращается и как распределена масса тела по объему.
Наиболее просто определяется момент инерции тел, имеющих правильную геометрическую форму и равномерное распределение массы по объему.
· Момент инерции однородного стержняотносительно оси, проходящей через центр инерции и перпендикулярной стержню
(3.6)
· Момент инерции однородного цилиндра относительно оси, перпендикулярной его основанию и проходящей через центр инерции,
(3.7)
· Момент инерции тонкостенного цилиндра или обруча относительно оси, перпендикулярной плоскости его основания и проходящей через его центр,
(3.8)
· Момент инерции шара относительно диаметра
(3.9)
Приведенные формулы для моментов инерции тел даны при условии, что ось вращения проходит через центр инерции. Чтобы определить моменты инерции тела относительно произвольной оси, следует воспользоваться теоремой Штейнера: момент инерции тела относительно произвольной оси вращения равен сумме момента инерции тела относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела на квадрат расстояния между осями:
(3.11)
[m — масса тела, d — расстояние от центра масс до выбранной оси вращения (расстояние между осями)].
Единица момента инерции — килограмм-метр в квадрате (кг • м2).
Так, момент инерции однородного стержня относительно оси, проходящей через его конец, по теореме Штейнера равен
(3.12)
§ 3.3 Уравнение динамики вращательного движения твердого тела
Рассмотрим вначале материальную точку А массой m, движущуюся по окружности радиусом г (рис. 1.16). Пусть на нее действует постоянная сила F, направленная по касательной к окружности. Согласно второму закону Ньютона, эта сила вызывает тангенциальное ускорение или F = maτ.
Используя соотношение aτ = βr , получаем F = m βr.
Умножим обе части написанного выше равенства на r.
Fr = m βr 2. (3.13)
Левая часть выражения (3.13) является моментом силы: М= Fr. Правая часть представляет собой произведение углового ускорения β на момент инерции материальной точки А: J= m r 2 .
Угловое ускорение точки при ее вращении вокруг неподвижной оси пропорционально вращающему моменту и обратно пропорционально моменту инерции (основное уравнение динамики вращательного движения материальной точки):
М = β J или (3.14)
При постоянном моменте вращающей силы угловое ускорение будет величиной постоянной и его можно выразить через разность угловых скоростей:
(3.15)
Тогда основное уравнение динамики вращательного движения можно записать в виде
или (3.16)
[ —момент импульса (или момент количества движения), МΔt — импульс момента сил (или импульс вращающего момента)].
Основное уравнение динамики вращательного движения можно записать в виде
(3.17)
§ 3.4 Закон сохранения момента импульса
Рассмотрим частый случай вращательного движения, когда суммарный момент внешних сил равен нулю. При вращательном движении тела каждая его частица движется с линейной скоростью υ = ωr, [r, — радиус окружности, которую описывает частица массой m, ω — угловая скорость, одинаковая для всех точек тела].
Момент импульса вращающегося тела равен сумме моментов
импульсов отдельных его частиц:
(3.18)
Изменение момента импульса равно импульсу момента сил:
dL=d(Jω)=Jdω=Mdt (3.19)
Если суммарный момент всех внешних сил, действующих на систему тела относительно произвольной неподвижной оси, равен нулю, т.е. М=0, то dL и векторная сумма моментов импульсов тел системы не изменяется с течением времени.
Сумма моментов импульсов всех тел изолированной системы сохраняется неизменной (закон сохранения момента импульса):
d(Jω)=0 Jω=const (3.20)
Согласно закону сохранения момента импульса можно записать
J1ω1= J2ω2 (3.21)
где J1 и ω1 — момент инерции и угловая скорость в начальный момент времени, а и J2 и ω2 – в момент времени t.
Из закона сохранения момента импульса следует, что при М=0 в процессе вращения системы вокруг оси любое изменение расстояния от тел до оси вращения должно сопровождаться изменением скорости их обращения вокруг этой оси. С увеличением расстояния скорость вращения уменьшается, с уменьшением – возрастает. Например, гимнаст, совершающий сальто, чтобы успеть сделать в воздухе несколько оборотов, во время прыжка свёртывается клубком. Балерина или фигуристка, кружась в пируэте, разводит руки если хочет замедлить вращение, и, наоборот, прижимает их к телу, когда старается вращаться как можно быстрее.
§ 3.5 Кинетическая энергия вращающегося тела
Определим кинетическую энергию твёрдого тела, вращающегося вокруг неподвижной оси. Разобьем это тело на n материальных точек. Каждая точка движется с линейной скоростью υi=ωri, тогда кинетическая энергия точки
или
Полная кинетическая энергия вращающегося твердого тела равна сумме кинетических энергий всех его материальных точек:
(3.22)
(J — момент инерции тела относительно оси вращения)
Если траектории всех точек лежат в параллельных плоскостях (как у цилиндра, скатывающегося с наклонной плоскости, каждая точка перемещается в своей плоскости рис ), это плоское движение. В соответствии с принципом Эйлера плоское движение всегда можно бесчисленным количеством способов разложить на поступательное и вращательное движение. Если шарик падает или скользит вдоль наклонной плоскости, он двигается только поступательно; когда же шарик катится – он ещё и вращается.
Если тело совершает поступательное и вращательное движения одновременно, то его полная кинетическая энергия равна
(3.23)
Из сопоставления формул кинетической энергии для поступательного и вращательного движений видно, что мерой инертности при вращательном движении служит момент инерции тела.
§ 3.6 Работа внешних сил при вращении твёрдого тела
При вращении твёрдого тела его потенциальная энергия не изменяется, поэтому элементарная работа внешних сил равна приращению кинетической энергии тела:
ΔA = ΔE или
Учитывая, что Jβ = M, ωdr = dφ, имеем
ΔA =MΔφ (3.24)
Работа внешних сил при повороте твёрдого тела на конечный угол φ равна
При вращении твёрдого тела вокруг неподвижной оси работа внешних сил определяется действием момента этих сил относительно данной оси. Если момент сил относительно оси равен нулю, то эти силы работы не производят.
Узнать еще:
Векторная природа вращательной кинематики
Угловые величины как векторы
Направление угловых величин, таких как угловая скорость и угловой момент, определяется с помощью правила правой руки.
Цели обучения
Определите направление вектора, используя Правило правой руки
Основные выводы
Ключевые моменты
- Угловая скорость и угловой момент являются векторными величинами и имеют как величину, так и направление.
- Направление угловой скорости и момента количества движения перпендикулярно плоскости вращения.
- Используя правило правой руки, направление угловой скорости и углового момента определяется как направление, в котором указывает большой палец правой руки, когда вы сгибаете пальцы в направлении вращения.
Ключевые термины
- угловой момент : векторная величина, описывающая объект в круговом движении; его величина равна импульсу частицы, а направление перпендикулярно плоскости ее кругового движения.
- Правило правой руки : Направление угловой скорости ω и углового момента L, на которое указывает большой палец правой руки, когда вы сгибаете пальцы в направлении вращения.
- угловая скорость : векторная величина, описывающая объект в круговом движении; его величина равна скорости частицы, а направление перпендикулярно плоскости ее кругового движения.
Угловой момент и угловая скорость имеют как величину, так и направление и, следовательно, являются векторными величинами.Направление этих величин по своей природе трудно отследить — точка на вращающемся колесе постоянно вращается и меняет направление. Ось вращения вращающегося колеса — единственное место, которое имеет фиксированное направление. Направление углового момента и скорости можно определить вдоль этой оси.
Представьте себе ось вращения как полюс, проходящий через центр колеса. Полюс выступает с обеих сторон колеса, и, в зависимости от того, с какой стороны вы смотрите, колесо вращается либо по часовой стрелке, либо против часовой стрелки.Эта зависимость от перспективы несколько затрудняет определение угла поворота. Как и для всех физических величин, существует стандарт для измерения, который делает эти типы величин согласованными. Для угловых величин направление вектора определяется с помощью правила правой руки, показанного в.
Правило правой руки : На рисунке (а) показан диск, вращающийся против часовой стрелки, если смотреть сверху. На рисунке (b) показано правило правой руки. Направление угловой скорости ω размер и угловой момент L определяются как направление, в котором указывает большой палец правой руки, когда вы сгибаете пальцы в направлении вращения диска, как показано.
Правило правой руки можно использовать для определения направления как углового момента, так и угловой скорости. Например, из вращающегося диска давайте снова представим себе полюс, проходящий через центр диска на оси вращения. Используя правило для правой руки, ваша правая рука будет брать штангу так, чтобы ваши четыре пальца (указательный, средний, безымянный и мизинец) следовали направлению вращения. То есть воображаемая стрелка от вашего запястья к кончикам пальцев указывает в том же направлении, что и диск.Кроме того, ваш большой палец указывает прямо на оси, перпендикулярно другим вашим пальцам (или параллельно «полюсу» на оси вращения). Используя это правило правой руки, направление угловой скорости ω и углового момента L определяется как направление, в котором указывает большой палец правой руки, когда вы сгибаете пальцы в направлении вращения диска.
Гироскопы
Гироскоп — это вращающееся колесо или диск, ось которого может принимать любую ориентацию.
Цели обучения
Сравните концепцию вращающегося колеса с гироскопом
Основные выводы
Ключевые моменты
- Крутящий момент перпендикулярен плоскости, образованной r и F, и представляет собой направление, в котором указал бы большой палец правой руки, если бы вы согнули пальцы правой руки в направлении F.
- Таким образом, направление крутящего момента совпадает с направлением создаваемого им момента количества движения.
- Гироскоп прецессирует вокруг вертикальной оси, поскольку крутящий момент всегда горизонтален и перпендикулярен L.Если гироскоп не вращается, он приобретает угловой момент в направлении крутящего момента и вращается вокруг горизонтальной оси, падая, как и следовало ожидать.
Ключевые термины
- подвес : устройство для подвешивания чего-либо, например, судового компаса, чтобы оно оставалось горизонтальным при опрокидывании опоры.
- Правило правой руки : Направление угловой скорости ω и углового момента L, на которое указывает большой палец правой руки, когда вы сгибаете пальцы в направлении вращения.
- крутящий момент : вращательное или скручивающее действие силы; (Единица СИ ньютон-метр или Нм; британская единица измерения фут-фунт или фут-фунт)
Гироскоп — это устройство для измерения или сохранения ориентации, основанное на принципах углового момента. С механической точки зрения гироскоп — это вращающееся колесо или диск, ось которого может свободно принимать любую ориентацию. Хотя эта ориентация не остается фиксированной, она изменяется в ответ на внешний крутящий момент гораздо меньше и в другом направлении, чем это было бы без большого углового момента, связанного с высокой скоростью вращения диска и моментом инерции.Ориентация устройства остается практически неизменной, независимо от движения монтажной платформы, поскольку установка устройства в карданном подвесе сводит к минимуму внешний крутящий момент.
Как это работает: примеры
Крутящий момент: Крутящий момент изменяет угловой момент, как выражается уравнением,
[латекс] \ tau = \ Delta \ text {L} / \ Delta \ text {t} [/ latex].
Это уравнение означает, что направление ΔL совпадает с направлением крутящего момента, который его создает, как показано на. Это направление можно определить с помощью правила правой руки, которое гласит, что пальцы на вашей руке сгибаются в направлении вращение или приложенная сила, и ваш большой палец указывает направление углового момента, крутящего момента и угловой скорости.
Направление крутящего момента и углового момента : На рисунке (а) крутящий момент перпендикулярен плоскости, образованной r и F, и представляет собой направление, в котором указал бы большой палец правой руки, если бы вы согнули пальцы в направлении F. Рисунок (b) показывает, что направление крутящего момента такое же, как и направление момента количества движения, которое он производит.
Вращающееся колесо: рассмотрим велосипедное колесо с прикрепленными к нему ручками, как показано на рисунке. Когда колесо вращается, как показано, его угловой момент находится слева от женщины.Предположим, человек, держащий колесо, пытается повернуть его, как показано на рисунке. Ее естественное ожидание состоит в том, что колесо будет вращаться в том направлении, в котором она его толкает, однако происходит совсем другое. Приложенные силы создают крутящий момент, который является горизонтальным по отношению к человеку, и этот крутящий момент создает изменение углового момента L в том же направлении, перпендикулярном исходному угловому моменту L, таким образом изменяя направление L, но не величину L. ΔL и L добавить, давая новый угловой момент с направлением, которое больше наклонено к человеку, чем раньше.Таким образом, ось колеса переместилась перпендикулярно действующим на нее силам, а не в ожидаемом направлении.
Гироскопический эффект : На рисунке (а) человек, держащий вращающееся колесо велосипеда, поднимает его правой рукой и толкает вниз левой рукой, пытаясь повернуть колесо. Это действие создает крутящий момент прямо к ней. Этот крутящий момент вызывает изменение углового момента ΔL точно в том же направлении. На рисунке (b) показана векторная диаграмма, показывающая, как ΔL и L складываются, создавая новый угловой момент, направленный больше в сторону человека.Колесо движется к человеку перпендикулярно силам, которые он на него оказывает.
Гироскоп: та же логика объясняет поведение гироскопов (см.). На вращающийся гироскоп действуют две силы. Создаваемый крутящий момент перпендикулярен угловому моменту, поэтому изменяется направление углового момента, но не его величина. Гироскоп прецессирует вокруг вертикальной оси, поскольку крутящий момент всегда горизонтален и перпендикулярен L. Если гироскоп не вращается, он приобретает угловой момент в направлении крутящего момента (L = ΔL) и вращается вокруг горизонтальной оси, падение, как и следовало ожидать.
Гироскопы : Как видно на рисунке (а), силы, действующие на вращающийся гироскоп, представляют собой его вес и поддерживающую силу от стойки. Эти силы создают горизонтальный крутящий момент на гироскопе, который создает изменение углового момента ΔL, которое также является горизонтальным. На рисунке (b) ΔL и L складываются, чтобы получить новый угловой момент с той же величиной, но в другом направлении, так что гироскоп прецессирует в указанном направлении, а не падает.
Приложения
Гироскопы служат датчиками вращения.По этой причине применения гироскопов включают инерциальные навигационные системы, в которых магнитные компасы не будут работать (как в телескопе Хаббла) или будут недостаточно точными (как в межконтинентальных баллистических ракетах). Еще одно применение — стабилизация летательных аппаратов, таких как радиоуправляемые вертолеты или беспилотные летательные аппараты.
Гироскопические эффекты: векторные аспекты углового момента
Цели обучения
К концу этого раздела вы сможете:
- Опишите правило правой руки, чтобы найти направление угловой скорости, количества движения и крутящего момента.
- Объясните гироскопический эффект.
- Изучите, как Земля действует как гигантский гироскоп.
Угловой момент — это вектор, поэтому имеет направление и величину . Крутящий момент влияет как на направление, так и на величину углового момента. Каково направление углового момента вращающегося объекта, такого как диск на рисунке 1? На рисунке показано правило правой руки , используемое для определения направления углового момента и угловой скорости.И L , и ω являются векторами, каждый из которых имеет направление и величину. Оба могут быть представлены стрелками. Правило правой руки определяет, что оба они должны быть перпендикулярны плоскости вращения в указанном направлении. Поскольку угловой момент связан с угловой скоростью соотношением L = I ω , направление L совпадает с направлением ω . Обратите внимание на рисунке, что оба указывают вдоль оси вращения.
Рис. 1. На рисунке (а) показан диск, вращающийся против часовой стрелки, если смотреть сверху.На рисунке (b) показано правило правой руки. Направление угловой скорости , размер и угловой момент L определяются как направление, в котором указывает большой палец правой руки, когда вы сгибаете пальцы в направлении вращения диска, как показано.
Теперь вспомним, что крутящий момент изменяет угловой момент, выраженный как
.[латекс] \ text {net} \ tau = \ frac {\ Delta \ mathbf {\ text {L}}} {\ Delta t} \\ [/ latex].
Это уравнение означает, что направление ΔL совпадает с направлением крутящего момента τ , который его создает.Этот результат проиллюстрирован на рисунке 2, который показывает направление крутящего момента и создаваемый им угловой момент. Давайте теперь рассмотрим велосипедное колесо с парой прикрепленных к нему ручек, как показано на рисунке 3. (Это устройство популярно на демонстрациях среди физиков, потому что оно делает неожиданные вещи.) Когда колесо вращается, как показано, его угловой момент равен слева от женщины. Предположим, человек, держащий колесо, пытается повернуть его, как показано на рисунке. Ее естественное ожидание состоит в том, что колесо будет вращаться в том направлении, в котором она его толкает, но происходит совсем другое.Действующие силы создают крутящий момент, горизонтальный по направлению к человеку, как показано на рисунке 3 (а). Этот крутящий момент создает изменение углового момента L, в том же направлении, перпендикулярном исходному угловому моменту L , таким образом изменяя направление L , но не величину L . На рисунке 3 показано, как складываются ΔL и L , давая новый угловой момент с направлением, которое больше наклонено к человеку, чем раньше. Таким образом, ось колеса переместилась на перпендикулярно действующим на нее силам на , а не в ожидаемом направлении.
Рис. 2. На рисунке (a) крутящий момент перпендикулярен плоскости, образованной r и F , и является направлением, в котором указал бы большой палец правой руки, если бы вы согнули пальцы в направлении F . Рисунок (b) показывает, что направление крутящего момента такое же, как и направление момента количества движения, которое он производит.
Рис. 3. На рисунке (а) человек, держащий вращающееся колесо велосипеда, поднимает его правой рукой и толкает вниз левой рукой, пытаясь повернуть колесо.Это действие создает крутящий момент прямо к ней. Этот крутящий момент вызывает изменение углового момента ΔL точно в том же направлении. На рисунке (b) показана векторная диаграмма, показывающая, как складываются ΔL и L , создавая новый угловой момент, направленный больше в сторону человека. Колесо движется к человеку перпендикулярно силам, которые он на него оказывает.
Эта же логика объясняет поведение гироскопов. На рисунке 4 показаны две силы, действующие на вращающийся гироскоп.Создаваемый крутящий момент перпендикулярен угловому моменту, поэтому изменяется направление крутящего момента, но не его величина. Гироскоп прецессирует вокруг вертикальной оси, поскольку крутящий момент всегда горизонтален и перпендикулярен L . Если гироскоп , а не вращается, он приобретает угловой момент в направлении крутящего момента ( L = ΔL ) и вращается вокруг горизонтальной оси, опрокидываясь, как и следовало ожидать. Сама Земля действует как гигантский гироскоп.Его угловой момент направлен вдоль оси и указывает на Полярную звезду, Полярную звезду. Но Земля медленно прецессирует (примерно раз в 26000 лет) из-за крутящего момента Солнца и Луны на ее несферической форме.
Рис. 4. Как видно на рисунке (а), силы, действующие на вращающийся гироскоп, — это его вес и поддерживающая сила от подставки. Эти силы создают горизонтальный крутящий момент на гироскопе, который создает изменение углового момента ΔL , которое также является горизонтальным. На рисунке (b) ΔL и L складываются для создания нового углового момента с той же величиной, но в другом направлении, так что гироскоп прецессирует в показанном направлении, а не падает.
Проверьте свое понимание
Кинетическая энергия вращения связана с угловым моментом? Означает ли это, что кинетическая энергия вращения — вектор?
РешениеНет, энергия всегда является скаляром, независимо от того, идет ли речь о движении. Никакая форма энергии не имеет направления в пространстве, и вы можете видеть, что кинетическая энергия вращения не зависит от направления движения, так же как линейная кинетическая энергия не зависит от направления движения.
Сводка раздела
- Крутящий момент перпендикулярен плоскости, образованной r и F , и является направлением, в котором будет указывать большой палец правой руки, если вы согнете пальцы правой руки в направлении F . Таким образом, направление крутящего момента совпадает с направлением создаваемого им углового момента.
- Гироскоп прецессирует вокруг вертикальной оси, так как крутящий момент всегда горизонтален и перпендикулярен L . Если гироскоп не вращается, он приобретает угловой момент в направлении крутящего момента ([latex] \ mathbf {\ text {L}} = \ Delta \ mathbf {\ text {L}} \\ [/ latex]), и он вращается вокруг горизонтальной оси, падая, как и следовало ожидать.
- Земля действует как гигантский гироскоп. Его угловой момент направлен вдоль оси и указывает на Полярную звезду, Полярную звезду.
Концептуальные вопросы
1. Во время движения на мотоцикле на скоростной автомагистрали студент-физик замечает, что легкое движение назад за правый руль наклоняет велосипед влево и приводит к повороту влево. Объясните, почему это происходит.
2. Гироскопы, используемые в системах наведения для указания направлений в пространстве, должны иметь угловой момент, который не меняется по направлению.Тем не менее, они часто подвергаются воздействию больших сил и ускорений. Как может направление их углового момента оставаться постоянным при ускорении?
Задачи и упражнения
1. Комплексные концепции
Ось Земли образует угол 23,5 ° с направлением, перпендикулярным плоскости орбиты Земли. Как показано на рисунке 6, эта ось прецессирует, делая один полный оборот за 25 780 y.
(a) Рассчитайте изменение углового момента вдвое.
(b) Каков средний крутящий момент, вызывающий это изменение углового момента?
(c) Если бы этот крутящий момент был создан единственной силой (а это не так), действующей в наиболее эффективной точке на экваторе, какова была бы его величина?
Рис. 6. Ось Земли медленно прецессирует, всегда составляя угол 23,5 ° с направлением, перпендикулярным плоскости орбиты Земли. Изменение углового момента для двух показанных положений довольно велико, хотя величина L не изменилась.
Глоссарий
- линейка правая:
- направление угловой скорости ω и углового момента L, на которое указывает большой палец правой руки, когда вы сгибаете пальцы в направлении вращения диска
Избранные решения проблем и ответы
1. (а) 5,64 × 10 33 кг м 2 /2 (б) 1,39 × 10 22 Н м (в) 2,17 × 10 15 N
Что такое характеристики крутящего момента? — Мворганизация.org
Что такое характеристики крутящего момента?
Рекомендуемые характеристики крутящего момента уникальны для каждого типа автомобиля. По определению, крутящий момент относится к величине вращающей силы в точке приложения. При прикреплении колеса к транспортному средству характеристики крутящего момента — это величина силы, рекомендованная для оборудования для обеспечения правильной установки.
Как рассчитать r в крутящем моменте?
Метод 1. Измерьте r от шарнира вдоль стержня до места приложения силы, умножьте на силу, а затем умножьте на синус угла между стержнем (линия, вдоль которой вы измеряете r) и силой.
Что происходит, когда крутящий момент равен нулю?
Если чистый крутящий момент на вращающемся объекте равен нулю, то он будет находиться в равновесии вращения и не сможет получить угловое ускорение.
Может ли единичное усилие создать нулевой крутящий момент?
Если у вас есть неограниченная точечная частица, например мяч в пустом пространстве, единственная сила, действующая на него, определяет только равномерно ускоренное линейное движение, а не крутящий момент.
Какой крутящий момент по линейке правой руки?
Правило правой руки для крутящего момента Чтобы использовать правило правой руки в задачах крутящего момента, возьмите правую руку и направьте ее в направлении вектора положения (r или d), затем поверните пальцы в направлении силы, и большой палец указывайте в направлении крутящего момента.
Почему правило правой руки для крутящего момента работает?
Правило правой руки также может связывать направление крутящего момента с направлением вращения. Если бы пальцы сгибались, они сгибались бы в направлении вращения. Таким образом, если вы согнете пальцы правой руки в направлении вращения, ваш большой палец будет указывать в направлении крутящего момента.
Какое правило винта правой руки?
Правило для винта с правой стороны может использоваться, когда направление должно быть определено на основе направления вращения, или наоборот.Ось «захватывается» правой рукой, пальцы сгибаются в направлении положительного вращения, а большой палец ориентирован в положительном направлении. …
Крутящий момент 10,6 — Университетская физика, том 1
Цели обучения
К концу этого раздела вы сможете:
- Опишите, как величина крутящего момента зависит от величины плеча рычага и угла, который вектор силы образует с плечом рычага.
- Определите знак (положительный или отрицательный) крутящего момента, используя правило правой руки
- Рассчитайте отдельные крутящие моменты вокруг общей оси и просуммируйте их, чтобы найти чистый крутящий момент
Важной величиной для описания динамики вращающегося твердого тела является крутящий момент.Мы видим приложение крутящего момента по-разному в нашем мире. У всех нас есть интуиция относительно крутящего момента, например, когда мы используем большой гаечный ключ, чтобы открутить упорный болт. Крутящий момент действует невидимым образом, например, когда мы нажимаем на акселератор в автомобиле, заставляя двигатель передавать дополнительный крутящий момент на трансмиссию. Или каждый раз, когда мы перемещаем свое тело из положения стоя, мы прикладываем крутящий момент к нашим конечностям. В этом разделе мы определяем крутящий момент и приводим аргументы в пользу уравнения для расчета крутящего момента для твердого тела с вращением с фиксированной осью.
Определение крутящего момента
До сих пор мы определили множество переменных, которые являются вращательными эквивалентами своих трансляционных аналогов. Давайте посмотрим, какой должна быть противоположность силе. Поскольку силы изменяют поступательное движение объектов, вращательный аналог должен быть связан с изменением вращательного движения объекта вокруг оси. Мы называем этот вращательный аналог крутящим моментом .
В повседневной жизни мы все время вращаем объекты вокруг оси, поэтому интуитивно мы уже многое знаем о крутящем моменте.Рассмотрим, например, как мы поворачиваем дверь, чтобы открыть ее. Во-первых, мы знаем, что дверь открывается медленно, если мы нажимаем слишком близко к ее петлям; открыть дверь эффективнее, если отодвинуть ее далеко от петель. Во-вторых, мы знаем, что нужно толкать перпендикулярно плоскости двери; если мы толкнем параллельно плоскости двери, мы не сможем ее повернуть. В-третьих, чем больше сила, тем эффективнее она открывает дверь; чем сильнее вы толкаете, тем быстрее открывается дверь. Первая точка подразумевает, что чем дальше сила приложена от оси вращения, тем больше угловое ускорение; второй подразумевает, что эффективность зависит от угла приложения силы; третий подразумевает, что величина силы также должна быть частью уравнения.Обратите внимание, что для вращения в плоскости крутящий момент имеет два возможных направления. Крутящий момент устанавливается по часовой стрелке или против часовой стрелки относительно выбранной точки поворота. (Рисунок) показывает вращение против часовой стрелки.
Рис. 10.31 Крутящий момент — это сила поворота или скручивания, показанная здесь для вращения двери на петлях (если смотреть сверху). Крутящий момент имеет как величину, так и направление. (а) Крутящий момент против часовой стрелки создается силой, действующий на расстоянии r от петель (точка поворота).(b) Меньший крутящий момент против часовой стрелки создается, когда меньшее усилие
действует на одинаковом расстоянии r от петель. (c) Та же сила, что и в (a), создает меньший крутящий момент против часовой стрелки при приложении на меньшем расстоянии от шарниров. (d) Меньший крутящий момент против часовой стрелки создается силой той же величины, что и (a), действующей на том же расстоянии, что и (a), но под углом
, что меньше
.
Теперь давайте рассмотрим, как определять крутящие моменты в общем трехмерном случае.
Момент
Когда сила
применяется к точке P , положение которой равно
относительно О ((рисунок)), крутящий момент
около O —
Рисунок 10.32 Крутящий момент перпендикулярен плоскости, определяемойи его направление определяется правилом правой руки.
Из определения поперечного произведения крутящий момент
перпендикулярно плоскости, содержащей
и имеет величину
.где
— угол между векторами
и
. Единица измерения крутящего момента в системе СИ — ньютон на метр, обычно записывается как
.. Количество
— перпендикулярное расстояние от O до линии, определяемой вектором
и называется рычагом .Учтите, что чем больше плечо рычага, тем больше крутящий момент. По плечу рычага величина крутящего момента составляет
.Перекрестное произведение
также сообщает нам знак крутящего момента. На (Рисунок) кросс-произведение
находится вдоль положительной оси z , что по соглашению является положительным крутящим моментом. Если
находится вдоль отрицательной оси z , это создает отрицательный крутящий момент.
Если мы рассмотрим диск, который может свободно вращаться вокруг оси через центр, как показано на (Рисунок), мы можем увидеть, как угол между радиусом
и сила
влияет на величину крутящего момента. Если угол равен нулю, крутящий момент равен нулю; если угол
, крутящий момент максимальный. Крутящий момент на (Рисунок) положительный, потому что направление крутящего момента по правилу правой руки выходит за пределы страницы вдоль положительной оси z .Диск вращается против часовой стрелки из-за крутящего момента в том же направлении, что и положительное угловое ускорение.
Рис. 10.33 Диск может свободно вращаться вокруг своей оси через центр. Величина крутящего момента на диске равна. Когда
крутящий момент равен нулю и диск не вращается. Когда
крутящий момент максимальный и диск вращается с максимальным угловым ускорением.
Можно рассчитать любое количество крутящих моментов относительно данной оси.Отдельные крутящие моменты складываются, чтобы получить чистый крутящий момент вокруг оси. Когда соответствующий знак (положительный или отрицательный) присваивается величинам отдельных крутящих моментов вокруг указанной оси, чистый крутящий момент вокруг оси является суммой отдельных крутящих моментов:
Расчет крутящего момента для твердых тел на фиксированной оси
В следующих примерах мы вычисляем крутящий момент как абстрактно, так и применительно к твердому телу.
Сначала мы представляем стратегию решения проблем.
Стратегия решения проблем: определение полезного крутящего момента
- Выберите систему координат с точкой поворота или осью вращения в качестве начала выбранной системы координат.
- Определите угол между плечами рычага.
и вектор силы.
- Возьмите векторное произведение
, чтобы определить, является ли крутящий момент положительным или отрицательным относительно точки поворота или оси.
- Оцените величину крутящего момента, используя
.
- Установите соответствующий знак, положительный или отрицательный, для величины.
- Суммируйте крутящие моменты, чтобы найти чистый крутящий момент.
Пример
Расчет крутящего момента
Четыре силы показаны на (Рисунок) в определенных местах и ориентациях относительно данной системы координат xy . Найдите крутящий момент, создаваемый каждой силой относительно начала координат, а затем используйте полученные результаты, чтобы найти чистый крутящий момент относительно начала координат.
Рисунок 10.34 Четыре силы, создающие крутящие моменты.Стратегия
Эта задача требует расчета крутящего момента. Все известные величины — силы с направлениями и плечами рычага — приведены на рисунке. Цель состоит в том, чтобы найти каждый отдельный крутящий момент и чистый крутящий момент путем суммирования отдельных крутящих моментов. Будьте осторожны, чтобы назначить правильный знак каждому крутящему моменту, используя крестное произведение
.и вектор силы
.
Решение
Используйте
, чтобы найти звездную величину, и
для определения знака крутящего момента.
Крутящий момент от силы 40 Н в первом квадранте равен
.
Перекрестное произведение
и
находится вне страницы, положительно.
Крутящий момент от силы 20 Н в третьем квадранте равен
.
Перекрестное произведение
и
находится на странице, поэтому он отрицательный.
Крутящий момент от силы 30 Н в третьем квадранте равен
.
Перекрестное произведение
и
находится вне страницы, положительно.
Крутящий момент от силы 20 Н во втором квадранте равен
.
Перекрестное произведение
и
находится вне страницы.
Таким образом, чистый крутящий момент равен
.Значение
Обратите внимание, что каждая сила, действующая в направлении против часовой стрелки, имеет положительный крутящий момент, тогда как каждая сила, действующая в направлении по часовой стрелке, имеет отрицательный крутящий момент. Крутящий момент больше, когда расстояние, сила или перпендикулярные компоненты больше.
Пример
Расчет крутящего момента на твердом теле (рисунок) показывает несколько сил, действующих в разных местах и под разными углами на маховик.У нас
,
и
. Найдите чистый крутящий момент на маховике вокруг оси, проходящей через центр.
Рисунок 10.35 Три силы, действующие на маховик.Стратегия
Рассчитываем каждый крутящий момент индивидуально, используя векторное произведение, и определяем знак крутящего момента. Затем суммируем крутящие моменты, чтобы найти чистый крутящий момент.
Решение
Начнем с
.Если мы посмотрим на (рисунок), то увидим, что
составляет угол
с радиус-вектором
. Взяв перекрестное произведение, мы видим, что он отсутствует на странице и поэтому является положительным. Мы также видим это, посчитав его величину:
.Теперь посмотрим на
. Угол между
и
это
, а перекрестное произведение находится на странице, поэтому крутящий момент отрицательный.Его значение
Когда мы оцениваем крутящий момент из-за
, видим, что угол, который он составляет с
равно нулю, поэтому
Следовательно,
не создает крутящего момента на маховике.
Оцениваем сумму крутящих моментов:
Значение
Ось вращения находится в центре масс маховика.Поскольку маховик находится на фиксированной оси, его нельзя перемещать. Если бы он находился на поверхности без трения и не был закреплен на месте,
приведет к смещению маховика, а также
. Его движение было бы комбинацией поступательного движения и вращения.
Проверьте свое понимание
Большое океанское судно садится на мель возле береговой линии, подобно судьбе Costa Concordia , и лежит под углом, как показано ниже.Спасательные бригады должны приложить крутящий момент, чтобы направить судно, чтобы его можно было спустить на плаву для транспортировки. Сила
, действующий в точке должен применяться справа от судна. Каков крутящий момент в точке контакта корабля с землей ((рисунок))?
Рис. 10.36 Судно садится на мель и кренится, требуя приложения крутящего момента, чтобы вернуть судно в вертикальное положение. [раскрыть-ответ q = ”418011 ″] Показать ответ [/ раскрыть-ответ]
[скрытый-ответ a =” 418011 ″] Угол между плечом рычага и вектором силы равен
следовательно,
.
Перекрестное произведение
дает отрицательный крутящий момент или вращающий момент по часовой стрелке.
Тогда крутящий момент
.
[/ hidden-answer]
Перекрестное произведение и правило правой руки: определение, формула и примеры — видео и стенограмма урока
Умножение векторов
Есть два способа умножения векторов, которые приводят к перекрестному произведению. Перекрестное произведение сообщает вам, какая часть одного вектора перпендикулярна другому вектору.
Здесь перекрестное произведение векторов a и b — это еще один вектор, перпендикулярный как a , так и b . Если вам известна величина вектора a и вектора b , вы можете найти величину векторного произведения, умножив величину a , величину b и синус угла между ними.
Это уравнение даст вам величину вектора векторного произведения, но подождите! Помните, что векторы всегда имеют величину и направление. Как нам найти направление? Для этого нам понадобится правило правой руки.
Чтобы использовать правило для правой руки , сначала нужно поднять правую руку. Убедитесь, что это не ваша левая сторона, иначе ничего не получится! Держите указательный, средний и большой пальцы так, чтобы они были перпендикулярны друг другу, как в системе координат x , y и z .Теперь поверните руку так, чтобы указательный палец указывал в направлении вектора a , а средний палец — в направлении вектора b . Ваш большой палец будет указывать в направлении перекрестного произведения a x b .
Будьте осторожны при вычислении векторного произведения, потому что легко перепутать векторы. Однако порядок важен: a x b не равно b x a .
Применение перекрестного произведения
Одним из важных приложений перекрестного произведения является вычисление крутящего момента. Крутящий момент — это стремление силы заставить объект вращаться. Когда вы нажимаете на конец гаечного ключа, вы прикладываете крутящий момент, чтобы заставить его вращаться. Только часть силы, перпендикулярная гаечному ключу, будет создавать крутящий момент, и помните, это именно то, что вам говорит перекрестное произведение!
Крутящий момент вычисляется путем нахождения перекрестного произведения вектора положения от точки вращения до места приложения силы, вектора, известного как плечо момента ( r ) и вектора силы ( F ).
Предположим, что r = 0,50 м, F = 25 Н, а угол между r и F составляет 50 градусов. Какой крутящий момент создается силой?
Сначала найдите величину крутящего момента:
Это говорит о том, что величина крутящего момента равна 9.6 Н-м.
А как насчет направления? Воспользуемся правилом правой руки. Поднимите правую руку и укажите указательным пальцем в направлении r . Теперь поверните руку так, чтобы средний палец указывал на F . В каком направлении указывает ваш большой палец? Если вы правильно применили правую линейку, она должна указывать за пределы экрана и указывать положительный крутящий момент или силу, которая заставит гаечный ключ вращаться против часовой стрелки.
Перекрестные произведения могут использоваться и многими другими способами, например, для вычисления магнитной силы, действующей на движущийся электрический заряд, и углового момента вращающегося объекта.Независимо от конкретной ситуации, перекрестное произведение всегда вычисляется одинаково, и это всегда будет другой вектор, перпендикулярный двум исходным векторам.
Резюме урока
Вектор — это математическая величина, которая имеет как величину, так и направление. Вектор положения — это вектор, который сообщает вам, где находится объект относительно некоторого начала. Перекрестное произведение — это способ умножения двух векторов, которые говорят вам, какая часть одного вектора перпендикулярна другому.Перекрестным произведением всегда будет другой вектор, перпендикулярный обоим исходным векторам. Направление перекрестного произведения определяется с помощью правила правой руки , а величина перекрестного произведения определяется по формуле:
Крутящий момент — это тенденция силы, заставляющая объект вращаться. Когда вы нажимаете на конец гаечного ключа, вы прикладываете крутящий момент, чтобы заставить его вращаться. Он рассчитывается путем нахождения перекрестного произведения вектора положения от точки вращения до места приложения силы; вектор, известный как плечо момента ( r ) и вектор силы ( F ).
Что такое крутящий момент? — Советы по линейному перемещению
В этой статье мы отвечаем на общий вопрос «что такое крутящий момент?» Хотя крутящий момент относится к вращательному движению, это фундаментальное понятие в приложениях линейного движения. Роторные двигатели создают крутящий момент, и когда этот крутящий момент передается в приводную систему, такую как винт, ремень и шкив, рейка и шестерня или цепь и звездочка, он преобразуется в линейное движение.
Что такое крутящий момент?
Крутящий момент — это вращательный эквивалент силы.В частности, это сила , действующая на расстоянии от оси вращения объекта . Точно так же, как сила, приложенная к объекту, заставит его двигаться линейно, крутящий момент, приложенный к объекту, заставит его вращаться вокруг точки поворота. Точка поворота известна как ось вращения, а перпендикулярное расстояние силы от оси вращения известно как плечо момента. Вот почему крутящий момент также называют моментом силы.
В простейшем случае приложенная сила перпендикулярна оси вращения.В этом случае крутящий момент — это просто произведение силы на расстояние от оси вращения:
Изображение предоставлено: Physicstutorials.orgНо во многих приложениях сила не возникает перпендикулярно оси вращения. В этом случае необходимо принять во внимание угол действия силы, чтобы найти длину плеча момента:
Изображение предоставлено: Physicstutorials.orgКрутящий момент обычно обозначается с заглавной буквы «Т», но правильным символом является греческая буква тау, «τ.«Когда крутящий момент называется моментом силы, используется символ« M ».
Крутящий момент является векторной величиной, что означает, что он имеет как величину, так и направление. Направление крутящего момента можно найти с помощью правила правой руки. Согните пальцы правой руки от направления d (или r для радиуса) к направлению F. Когда это будет сделано, большой палец будет указывать в направлении крутящего момента.
Изображение предоставлено: Р. Нейв, Государственный университет Джорджии,При определении размеров приложения для линейного перемещения важно понимать требования к крутящему моменту и ограничения всех компонентов системы.Требуемый крутящий момент — один из ключевых параметров при выборе двигателя. В большинстве случаев необходимо учитывать как пиковый крутящий момент (который обычно возникает во время ускорения или удержания нагрузки), так и постоянный или среднеквадратичный крутящий момент. Кроме того, валы и другие компоненты, которые передают крутящий момент по трансмиссии, такие как валы редукторов, муфты и винтовые валы, также должны выдерживать пиковый крутящий момент приложения.
Термины «крутящий момент» и «момент» часто используются как синонимы.Хотя они похожи, крутящий момент вызывает вращение вокруг оси, в то время как момент — это сила, приложенная на расстоянии, при котором , а не , производит вращение. Например, у винта есть ось вращения, поэтому сила, приложенная на расстоянии от этой оси, заставит винт вращаться. Профилированная направляющая рельса, напротив, неподвижна и не вращается. Сила, приложенная перпендикулярно к направляющей, создает момент, но не вызывает вращения.
момент
На главную> Фонд> Момент силы
Момент силы (крутящий момент)
Момент силы ( крутящий момент ) или просто момент является причиной углового движения (вращения).Момент силы создается силой, которая не проходит через центр вращения (COR). На рисунке 1 показана система гаечных ключей, которая используется для вращения круглого объекта (назовем его гайкой). Поскольку задача здесь — вращать круговую гайку, COR находится в центре гайки. Усилие ( F, ), прилагаемое рукой для вращения гайки и гаечного ключа, действует на точку действия (POA) на ручке вдоль линии действия (LOA; пунктирная линия ).В этом примере плоскость действия — это экран монитора, перпендикулярный линии обзора. Если усилие достаточно велико, гаечный ключ и гайка будут вращаться по часовой стрелке в плоскости действия или плоскости вращения .
Рис. 1. Плечо момента, образованное силой руки, действующей на гаечный ключ
Фактически вращение гайки на Рисунке 1 вызывает момент, создаваемый силой руки.Величина момента, создаваемого силой руки, зависит от двух параметров: величины силы и длины плеча момента . Плечо момента (на рисунке 1) — это кратчайшее (т.е. перпендикулярное) расстояние от COR до LOA. Момент руки определяется в плоскости действия / вращения. Момент, создаваемый силой руки ( F ) на Рисунке 1, таким образом:
Где M = величина момента.Момент пропорционален приложенной силе и плечу момента, образованному силой по отношению к COR (Уравнение 1).
Момент — это вектор, поэтому он должен иметь направление. Направление момента, создаваемого силой, всегда перпендикулярно плоскости действия. Плоскость действия — это плоскость, образованная плечом момента и вектором силы. Правый винт используется для определения направления момента; когда четыре пальца правой руки выровнены по направлению вращения, большой палец показывает направление момента (рисунок 2).Правый винт движется вперед при вращении по часовой стрелке.
Рис. 2. Направление вращения в зависимости от направления момента, вызывающего вращение (источник изображения: http: // www. Wikipedia.com)
В отличие от простого плоского движения, при котором плоскость действия перпендикулярна линии взгляда (рис. 1), определение плеча момента и направления результирующего момента, действующего на свободно вращающееся тело в трехмерном пространстве, является более точным. сложный.Например, на рисунке 3 показан GRF ( F ), действующий на ведущую ногу, и момент ( M ), создаваемый этой силой относительно COM тела. Поскольку вращение тела не ограничено и в этом случае нет фиксированного COR, COM тела может служить COR с точки зрения углового воздействия GRF ведущей ноги на тело.
Рис. 3. Момент силы, создаваемый GRF ведущей ноги о корпусе COM рядом с EDA
Обратите внимание, что GRF ведущей стопы не обязательно находится во фронтальной плоскости: i.е., его прямая / обратная составляющая не равна нулю. Самый простой способ визуализировать план действия в трехмерном пространстве — это нарисовать стрелку ( r ) от COM (COR) к POA. Это вектор относительного положения POA относительно COR. Самолет, обозначенный обозначениями r и F , является плоскостью действия. Плечо момента может быть идентифицировано на плоскости действия. Плечо момента образует прямой угол с линией действия GRF (рис. 3).
Математически момент ( M ) может быть выражен как произведение вектора вектора положения ( r ) и вектора силы ( F ):
Векторное произведение — это особый способ умножения двух векторов.Поскольку используется крестик (‘x’), эта математическая операция также называется перекрестным произведением . Когда относительное положение и сила даны в компонентах, момент также может быть выражен в компонентах:
Результирующий вектор момента ( M ), заданный в компонентах в уравнении 3, удовлетворяет двум требованиям: (1) его величина равна длине плеча момента, умноженному на величину силы; (2) его направление перпендикулярно плоскости действия в соответствии с правилом правого винта.Вектор момента также имеет три перпендикулярные составляющие:
На рис. 4 показаны три позы элитного гольфиста-мужчины, наблюдаемые в трех разных ракурсах: спереди (A) рядом с EDA, сбоку (B) рядом с BI и горизонтально (C) рядом с EDA. Оси X -, Y — и Z опорного кадра выровнены по направлениям вперед / назад (F / B), вперед / назад (T / A) и вверх / вниз (U / D; вертикальные) оси соответственно.На Рисунке 4A показана проекция GRF ведущей опоры на плоскость YZ , которая перпендикулярна оси F / B (ось X ). представляет собой плечо момента, образованное этой силой по отношению к COM на плоскости YZ . На рисунке 4B вектор GRF был спроецирован на плоскость XZ (), и по этой силе плечо момента () было идентифицировано в той же плоскости. Точно так же оба и на рисунке 4C определены в горизонтальной плоскости. Таким образом, величины компонентов момента равны:
Знаки (+/-) компонентов следует определять исходя из направлений составляющих момента.Если составляющая момента направлена против часовой стрелки (рисунки 4A и 4C), знак должен быть положительным. Момент по часовой стрелке (рисунок 4B) отрицательный.
Рис. 4. Компоненты момента, наблюдаемые в трех видах: вид спереди (A), вид сбоку (B) и горизонтальный вид (C).
Каждая составляющая момента может быть далее разбита на два отдельных члена, генерируемых отдельными составляющими силы. Например, на рис. 5 (вид спереди) показаны моменты, создаваемые и.В этом случае компоненты Y и Z вектора относительного положения точки POA к COR ( y и z ) служат в качестве плеч моментов компонентов силы. Обе компоненты силы на рисунке 5 создают моменты в направлении против часовой стрелки (положительное). Поскольку Y -компонент r ( y ) и Z -компонент F оба являются положительными, поэтому y * F z также должны быть положительными.Однако компонент Z в r отрицателен, а компонент Y в F положителен. Поскольку z * Fy становится отрицательным, следует добавить отрицательный знак, чтобы сделать направление положительным.
Рис. 5. Разделение момента оси F / B (Mx) на два члена, генерируемых отдельными составляющими силы.
Одним из важных аспектов момента, создаваемого GRF с ведущей опорой вокруг оси F / B (рис. 5), является то, что этот момент чувствителен к горизонтальной силе, действующей в направлении T / A ().